FIRSTFare 2013 overview of electronics-2014
41
Overview of Control System 2013/2014 Season Tim Bennington-Davis Mentor for team 1425 (Error Code Xero – Wilsonville) Robot Inspector FTA for 2014 Districts [email protected] (503) 449-9507
-
Upload
oregon-first-robotics -
Category
Business
-
view
426 -
download
2
Transcript of FIRSTFare 2013 overview of electronics-2014

Overview of Control System
2013/2014 Season
Tim Bennington-Davis
Mentor for team 1425 (Error Code Xero – Wilsonville)
Robot Inspector
FTA for 2014 Districts
(503) 449-9507

Agenda
What are the parts?
How do they fit together?
How does the system work?
Where can I learn more?
What advice can be passed along?

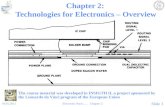
Robot Data Schematic

Elements of the System
National Instruments cRIO (brains)
Digital Sidecar (make signals available)
Power Distribution Board & Battery
Analog Breakout (analog inputs)
Pneumatics Breakout (drives solenoids)
Netbook Driver Station
Wireless Interface (802.11)
Camera
Motor controllers and relays

cRIO
Modular Controller, Industrial Strength
Comes with multiple interface modules
◦ 2 Analog Input Modules
Plus 2 Analog Breakout
◦ 2 Digital Input/Output Modules
Connect via really big cable to Digital Sidecar
◦ 1 Digital Output Module
Use with Solenoid Breakout
Veteran teams do not get new cRIO’s and
modules
Rookie teams will get new smaller cRIO

cRIO and Modules
Legacy Teams have 8-slot cRIO chassis
Rookie teams will get new 4-slot cRIO

Digital Sidecar
Connects to cRIO9403 with 32-pin cable
Provides
◦ 10 PWM outputs (Victors, Jaguars, RC servos)
Can be configured on a per-output basis to drive 6V
RC servos with jumpers
◦ 14 GPIO with +5V on each (digital in/out)
◦ 16 Relay Outputs (drives Spikes)
◦ I2C headers (Standard and NXT-compatible)
◦ 12V supply,
Provides +5V output
Reverse polarity protected

Digital Sidecar

Power Distribution Module
Custom Design by FIRST
6-15 VDC, reverse polarity protected
Metric shanks, not SAE!
8 outputs for 40A breakers
12 outputs for 30A/20A breakers
24VDC output for CompactRIO
12V output
5V output for camera
LED’s for power supplies and open
breakers

Power Distribution Module

Power Distribution Diagram

Battery
12 VDC, sealed lead-acid
MUST use one of two models
◦ MK ES17-12
◦ Enersys NP18-12
Battery Exchange in Oregon City can get
them
Don’t wait too long to order

Analog Breakout
Supplies +5V/3A for powering sensors
8 Analog Inputs, 3 pin PWM cable config.
Mounts to NI 9201 Analog Module
Configurable to make one input capable
of measuring battery voltage - mandatory
LED to indicate unit has power
Power to unit requires wiring to power
distribution module

Analog Breakout

Pneumatics Breakout
Reverse-battery protection
8 Outputs to directly drive solenoids
Mounts to NI 9472 Digital Module
Means you don’t have to use Spikes to
drive solenoids anymore
◦ Save weight, space and money
LED to indicate unit has power
Power to unit requires wiring to power
distribution module, can tolerate 12v or
24v to match solenoids

Pneumatics Breakout

Wireless Bridge – DAP-1522
802.11n MIMO
Must use DAP-1522, Rev B1
You will assign fixed IP addresses to your
components, using team number

Powering the DAP-1522
DC-DC converter must be used
Converts 12 VDC to 5 VDC

Ethernet Camera – Axis M1011 or
206 Streaming video for drive-
time control has been
challenging
Connects to RJ45 on cRIO
Can be used to track colors
and shapes

Jaguar Motor Controller
Grey (old) and Black – they are different
CAN bus interface, current limit features
Do NOT remove the power screws
They are “swaged” on the end, which is
meant to keep them from coming out
Removing them drops metal shavings
into the guts

Jaguar Motor Controller
Black units have conformal coating to
minimize damage if screws are removed
Have integral PID speed control, provided
you hook up encoders
PWM or CAN interface
Direct connect to wheel encoders
You may get vouchers for controllers so
you can choose

Talon Motor Controller
Simple controller, but very robust
PWM interface only
Brake and coast jumper
Fan optional

Victor Motor Controller
Also simple and robust
Newest model is 888. 884 also usable.
PWM interface only
Brake and coast jumper
No PID closed-loop control

Spike “H-Bridge”
Relay operation
On-Off-Reverse
Connects to “relay” output of digital
sidecar, not PWM
Use for on-off motor control,
compressor

Operator Interface
Classmate Computer or equivalent
Must run correct version of supplied
software – CHECK UPDATES!
IP connected
Communicates constantly with cRIO
USB expansion hub
Joysticks (USB)
Cypress pSOC I/O expansion device
Many teams use their own computers

Operator Interface
Typically a 48” x 8” console
Joysticks or other driving interface
Buttons, switches, dials, lights
Your team designs and builds it
Effective driving operation is enabled by
careful ergonomic design, especially
when it comes to controlling the non-
drive functions

Operator Interface
Cypress board provides 16 configurable
digital pins, 8 analog inputs
Plug into proto board, or build/buy
carrier board
Digital and analog functions map to
software

Typical OI Functions
switch (on/off) – 1 digital input
3 position switch (on/off/on) – 2 digital
inputs
Potentiometer (variable position) – 1
analog input
Push button switch (momentary
contact) – 1 digital input
Indication (LED) – 1 digital output

Link between OI and cRIO
Default software causes cRIO and
classmate computer to update each
other several times a second
All OI data is fed to cRIO automatically
If they don’t talk, your robot disables
itself
Status of communication shown in
classmate GUI

Other Handy Parts
10-turn potentiometers
Not supplied – Norvac, Fry’s, Digi-Key
Wire to analog input
US Digital Quadrature Encoders
Mount in many transmissions
Count transmission rotation, direction
Can interface directly with Jaguars
3-axis accelerometer (supplied)
Gyro (supplied)
Analog Ultrasonic detectors
For measuring close distances

Sources for parts
Digikey and Mouser (web ordering, fast
shipping, good prices)
Fry’s and Oregon Electronics (more expensive,
but stock on shelf. Limited assortment)
US Digital (quadrature encoders)
Sparkfun electronics (sensors, arduinos)
Pololu robotics (sensors, arduinos)

Helpful Hints

Working the Wago
Yes !
NO !
• Find a Wago tool, or make one. Most screwdrivers cause damage
• Take care to insert directly at a fixed angle, pressing straight in
• Do not pry. The goal is to open the spring by pressing in the
screwdriver, not by prying
End View

802.11 Radio Link
Only the DAP-1522 Rev B is acceptable at
events
Learn how to set static IP addresses on
your PC, and how to log into AP and
adapter to configure them manually
Turn off “Wireless Protection”, so that
inadvertent presses of external buttons
don’t change settings unexpectedly
At competitions, must put switch in
“bridge”

Bridge Placement
The DAP-1522 has antennas at either end
Uses both antennas for 802.11n MIMO
Mount it up away from robot frame,
motors, cRIO
Don’t show up with a Rev-A model

Hints Learned the Hard Way
Solder your terminals – prevent failure
Keep large gauge wiring as short as possible
Lay your electronics out so you can
troubleshoot it – 2 layers sometimes works
Make a battery charging record
◦ During tournaments, know which one is charged
Read the inspection rules early – a great “cheat
sheet” for guiding you
Label your wires or use color markings, to
make troubleshooting easier
Robot frame is NOT connected to ground

Hints Learned the Hard Way
Use red wire for +, black wire for –
Never lift a battery by the leads.
Shut off the power before plugging or
unplugging any thing!
Cover electronics when doing metal work
above – metal shavings will ruin your day
Pay attention to wire gauge requirements
All electrical failures are mechanical in nature
…. Make your electrical connections so they
will survive being whacked. - check before
every round.

Hints Learned the Hard Way
Before bagging your robot….. Inspect it
◦ Get an experienced robot inspector to come to your
location and go over it.
◦ Minimize the number of surprises you may
experience at your first event
◦ If pre-inspection is allowed, take advantage of it
At the first competition … get out for a
practice match
◦ This gives you a chance to confirm connecting to the
field

Hints Learned the Hard Way
At the competition
◦ There is no power for your custom laptop at the
driver station of the field.
◦ YOU MAY NOT PLUG YOUR DS LAPTOP IN AT
THE FIELD – so keep your battery charged
Develop and use a checklist to use before each
match
◦ Matches do not get re-run because your robot has a
loose wire, dead battery, or wasn’t properly prepared

Wrapping Up
Go to the FIRST website
◦ FRC – Resources – Technical Resources

Wrapping Up
Read last year’s Robot Rules Manual
Look at the schematics and technical
information from last year – now!
Visit an experienced team for a day
Ask around
◦ Tim Bennington-Davis
(503) 449-9507