
FIR IIR Pole Zero AME 140 Lec 23
13
Topics: • Single “tap” feed-forward (FIR) filter • Single “tap” feed-back (IIR) filter • Frequency response and pole-zero diagrams • Higher order FIR filters • More general filters 3 Introduction to Audio and Music Engineering Lecture 23
-
Upload
elamaranvlsi -
Category
Documents
-
view
12 -
download
1
description
FIR filter
Transcript of FIR IIR Pole Zero AME 140 Lec 23
Topics:�• Single “tap” feed-forward (FIR) filter�• Single “tap” feed-back (IIR) filter�• Frequency response and pole-zero diagrams�• Higher order FIR filters �• More general filters�
3�
Introduction to �Audio and Music Engineering �
Lecture 23�

Back to the simple filter …�
4�
Y = X + a 1z −1X
1 unit delay� a1 �
+ �input X � output Y�
x (n − 1) a 1x (n − 1)
Multiply by z/z: �zz1 + a 1z −1
1 =z + a 1z
Y = H (z)XH (z) = 1 + a 1z
−1
We want to know the magnitude of H(z).� H (z) =z + a 1
z
We are interested in |H(z)| for the allowed frequencies (on unit semicircle in z-plane).� z → e jω
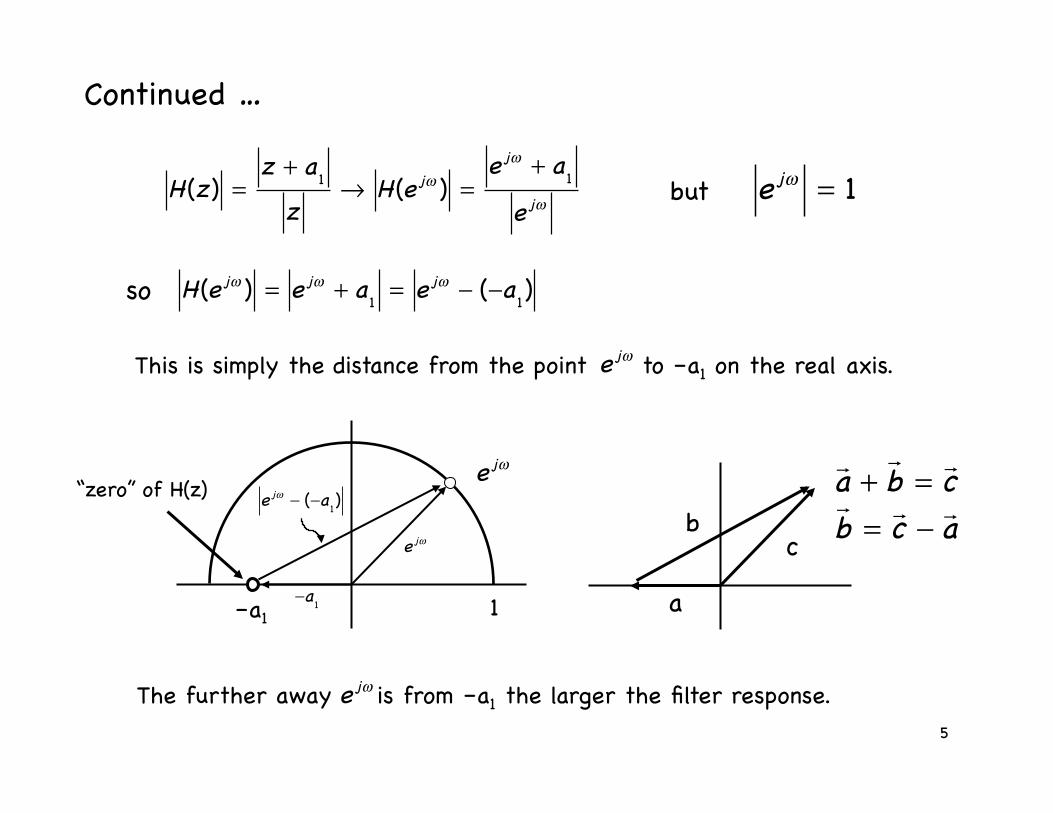
Continued …�
5�
but �H (z) =z + a 1
z→ H (e jω ) =
e jω + a 1
e jω e jω = 1
H (e jω ) = e jω + a 1 = e jω − (−a 1 )so�
This is simply the distance from the point to –a1 on the real axis.�e jω
–a1 �
e jω
1 �
e jω − (−a 1 )
e jω
−a 1
c�b �
a�
a +b =c
b =c −a
The further away is from –a1 the larger the filter response.�e jω
“zero” of H(z)�

What does look like?�
6�
H (e jω )
Low pass �
–a1 �
e jω
1 �
ω = 0
π
H (e jω )
ω
1 �
1 + a1 �2�
0�
1 - a1 �ω = π
High pass �
a1 �
e jω
1 �
ω = 0
π
H (e jω )
ω
1 �
1 + a1 �2�
0�
1 - a1 �ω = π
ω = π4
ω = π2
ω = 3π4
ω = π4
ω = π2
ω = 3π4

Feed-forward and feed-back filters�
7�
x (n) = [1, 0, 0, 0, 0, 0...]
Z-1 � a1 �
+ �input X � output Y�
feed-forward�
Response is non-zero only for n = 0,1 .�
y (n) = [1,a 1 , 0, 0, 0, 0...]
y (n) = x (n) + a 1x (n − 1)
impulse�
response�
Finite impulse response filter : FIR �
feed-back �
Z-1 �b1 �
+ �input X � output Y�
y (n) = x (n) + b 1y (n − 1)
x (n) = [1, 0, 0, 0, 0, 0...]
Response never returns to zero! �
y (n) = [1,b 1 ,b 12 ,b 1
3,b 14...]
impulse�
response�
Infinite impulse response filter : IIR �

Frequency response of feedback filter�
8�
Z-1 �b1 �
+ �input X � output Y�
Y = X + b 1z −1Y
zz
multiply by �
Y (1 − b 1z −1 ) = XY = 1
(1 − b 1z −1 ) X H (z) = 11 − b 1z
−1
zz
11 − b 1z −1 = z
z − b 1H (z) =
zz − b 1
H (ω ) =e jω
e jω − b 1
= 1e jω − b 1
z → e jω
b1 �
e jω
1 �
e jω − b 1e jω
-1 �So the feedback filter response is proportional to the inverse of the distance from a point on the unit semicircle to the point b1.� “pole” of H(z)�

π
H (e jω )
ω
1 �
2�
0�- b1 �
e jω
1 �
1/(1+b1)�
1/(1-b1)�
Frequency response of the feedback filter�
9�
low pass�
b1 �
e jω
1 �
ω = 0
π
H (e jω )
ω
1 �
2�
0�
ω = π
ω = π4
ω = π2
ω = 3π4
1/(1+b1)�
1/(1-b1)�
high pass �
ω = 0ω = π
ω = π4
ω = π2
ω = 3π4

Feedback filter stability�
10�
e jω
1 � π
H (e jω )
ω
1 �2�
0�
3�4�5�
As the pole moves closer to the unit circle the response increases.�
As the pole moves out past the unit circle the filter response diverges.�" " " " " " " " "… the filter is unstable.�
Z-1 �b1 �
+input X � output
Y�
y (n) = x (n) + b 1y (n − 1)
x (n) = [1, 0, 0, 0, 0, 0...]
y (n) = [1,b 1 ,b 12 ,b 1
3,b 14...]
If b1 > 1, y(n) grows without bound! �
input impulse�
response�
Poles must remain within the unit circle to make the filter stable.�
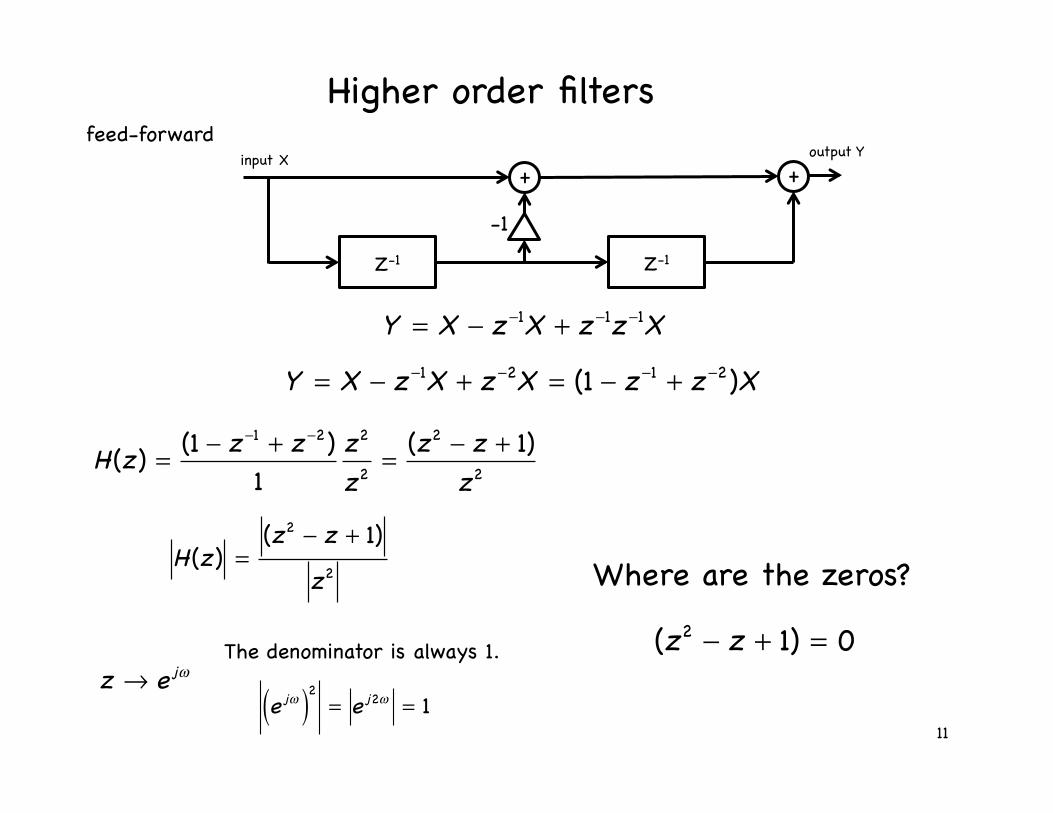
Higher order filters �
11 �
feed-forward�
Z-1 �
-1 �
+ �input X �
Z-1 �
+ �output Y�
Y = X − z −1X + z −1z −1XY = X − z −1X + z −2X = (1 − z −1 + z −2 )X
H (z) = (1 − z −1 + z −2 )1
z2
z2 = (z2 − z + 1)z2
H (z) =(z2 − z + 1)
z2
z → e jωThe denominator is always 1.�
e jω( )2 = e j2ω = 1
(z2 − z + 1) = 0Where are the zeros?�

Finding the zeros of H(z)�
12�
(z2 − z + 1) = 0
→ z = 1 ± 1 − 42 = 1
2 ± j 32
Convert to polar form�
r = 1 2( )2 + 3 2( )2⎡
⎣⎢
⎤
⎦⎥
1/2
= 1 4 + 3 4⎡⎣ ⎤⎦1/2
= 1
θ = tan−1 3 21 2
⎛
⎝⎜
⎞
⎠⎟ = tan−1 3( ) = ± π 3 ±60( )
z = e + jπ 3 and z = e − jπ 3zeros are at …�
e jω
1 �
e jω
“zeros” of H(z)�
ω = 0ω = π

Finding the transfer function �
13�
num(H (z)) = z − e jπ/3( ) z − e − jπ/3( ) = z − e jπ/3( ) ⋅ z − e − jπ/3( )
e jω
1 �
e jω
ω = 0ω = π
Just the product of the distances from to each of
the two zeros.�e jω
π
H (e jω )
ω0� π / 3
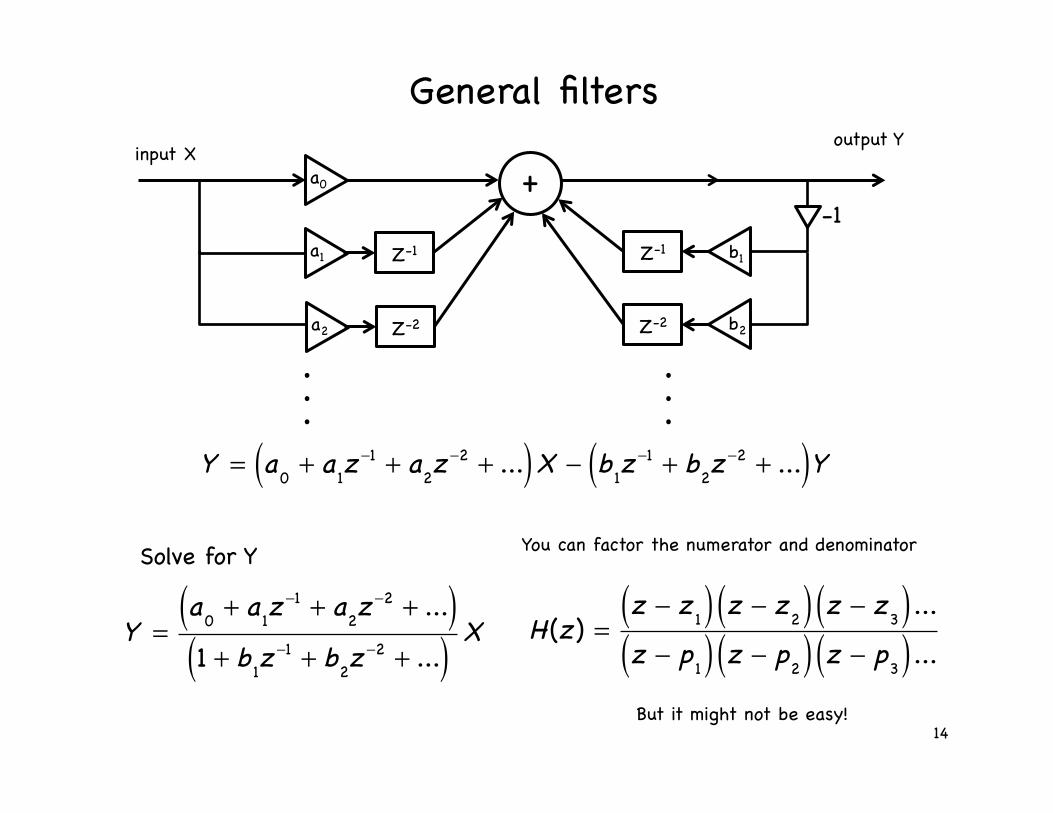
General filters�
14�
+ �input X �
output Y�
a0 �
Z-1 �a1 �
Z-2 �a2 �
Z-1 � b1 �
Z-2 � b2 �
. . .�
. . .�
Y = a0 + a 1z −1 + a2z −2 + ...( )X − b 1z −1 + b2z −2 + ...( )Y
Y =a0 + a 1z −1 + a2z −2 + ...( )1 + b 1z −1 + b2z −2 + ...( ) X H (z) =
z − z 1( ) z − z2( ) z − z3( ) ...z − p 1( ) z − p2( ) z − p3( ) ...
Solve for Y� You can factor the numerator and denominator �
But it might not be easy! �
-1 �

Finding the frequency response …�
15�
H (ω ) =e jω − z 1( ) e jω − z2( ) e jω − z3( ) ...e jω − p 1( ) e jω − p2( ) e jω − p3( ) ...
Multiply the distances to each zero then divide by the products of the distances to each of the poles. �


















