Final Thesis Harsh Pandey
105
MANIPULATION AND SEPARATION OF OBJECTS AT THE MICROSCALE, IN SOLUTION AND AT INTERFACES By Harsh Pandey A Dissertation Submitted to the Graduate Faculty of Rensselaer Polytechnic Institute in Partial Fulfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY Major Subject: CHEMICAL AND BIOLOGICAL ENGINEERING Examining Committee: Prof. Patrick T. Underhill, Dissertation Adviser Prof. Shekhar Garde, Member Prof. Joel L. Plawsky, Member Prof. Chang Y. Ryu, Member Rensselaer Polytechnic Institute Troy, New York July 2015 (For Graduation August 2015)
-
Upload
harsh-pandey-phd -
Category
Documents
-
view
114 -
download
1
Transcript of Final Thesis Harsh Pandey

MANIPULATION AND SEPARATION OF OBJECTS ATTHE MICROSCALE, IN SOLUTION AND AT
INTERFACES
By
Harsh Pandey
A Dissertation Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the Degree of
DOCTOR OF PHILOSOPHY
Major Subject: CHEMICAL AND BIOLOGICAL ENGINEERING
Examining Committee:
Prof. Patrick T. Underhill, Dissertation Adviser
Prof. Shekhar Garde, Member
Prof. Joel L. Plawsky, Member
Prof. Chang Y. Ryu, Member
Rensselaer Polytechnic InstituteTroy, New York
July 2015(For Graduation August 2015)

c© Copyright 2015
by
Harsh Pandey
All Rights Reserved
ii

CONTENTS
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
1. MOTIVATION AND OBJECTIVES . . . . . . . . . . . . . . . . . . . . . 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. BACKGROUND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 DNA Electrophoresis . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Field-Flow Fractionation . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Microfluidics for Trapping and Manipulation . . . . . . . . . . . . . . 13
2.4 Manipulating Polymers at Aqueous Interfaces . . . . . . . . . . . . . 14
3. COARSE-GRAINEDMODELOF CONFORMATION-DEPENDENT ELEC-TROPHORETIC MOBILITY . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Model Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Hydrodynamic versus electrohydrodynamic interactions . . . . 18
3.2.2 Conformation-dependent mobility . . . . . . . . . . . . . . . . 22
3.3 Simulation Methodology . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.4 Model Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4.1 Straight channel migration . . . . . . . . . . . . . . . . . . . . 31
3.4.2 Stretching in an electric field gradient . . . . . . . . . . . . . . 34
3.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4. SIMULATIONS OF TRAPPING ANDMANIPULATION OFDEFORMABLEOBJECTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.1 Trapping Objects in Confined Microfluidic Geometries . . . . . . . . 40
4.2 Manipulating Objects in Unconfined Flows and Fields . . . . . . . . . 44
4.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
iii

5. SIMULATIONS OF TRAPPING ANDMANIPULATION OF RIGID ORI-ENTABLE OBJECTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2 Rigid Rod Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3 Stable Trapping Using Electric and Flow Fields . . . . . . . . . . . . 52
5.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6. MICROFLUIDICS EXPERIMENTS . . . . . . . . . . . . . . . . . . . . . 56
6.1 Channel Preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.2 Microscopy, Imaging and Data Analysis . . . . . . . . . . . . . . . . . 58
6.3 Observations At Equilibrium . . . . . . . . . . . . . . . . . . . . . . . 59
6.4 Observations under Fluid Flow . . . . . . . . . . . . . . . . . . . . . 60
6.5 Observations under Electric Field . . . . . . . . . . . . . . . . . . . . 62
6.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7. SIMULATIONS OF THE MANIPULATION OF POLYMERS AT AQUE-OUS INTERFACES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.2 Simulation Methodology . . . . . . . . . . . . . . . . . . . . . . . . . 71
7.3 Quantifying the Effect of Polymer Concentration on Self-Assembly . . 74
7.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8. IMPACT AND FUTURE DIRECTIONS . . . . . . . . . . . . . . . . . . . 78
APPENDICES
A. Calculation of Wall-Mediated Hydrodynamic Interactions . . . . . . . . . . 80
A.1 Blake’s solution for a point force near an infinite plane wall with no-slip 81
A.2 Hydrodynamic diffusion tensor for a bead-spring polymer betweentwo walls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
iv

LIST OF TABLES
6.1 Uncharged microspheres in the straight channel with an applied electricfield . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Electrophoresis of charged microspheres in the straight channel . . . . . 64
6.3 DNA electrophoresis in a straight channel . . . . . . . . . . . . . . . . . 65
6.4 Electrophoresis of charged microspheres in a T-channel . . . . . . . . . 66
v

LIST OF FIGURES
1.1 Illustration of the principle of conformation-dependent electrophoreticmobility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.1 Schematic illustration of the local electrostatics around a DNA coil . . . 7
2.2 Illustration of electro-hydrodynamic interactions (EHI) that occur dur-ing electrophoresis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Distribution of electrophoretic mobility of λ-phage DNA versus DNAvisual length. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Cross-channel migration of λ-phage DNA in capillary electrophoresis . . 12
2.5 (a) Hydrodynamic trap created by a planar extensional flow field atthe junction of two perpendicular microchannels. (b) The velocity field(top) and the velocity potential well (bottom) for a particle in the flowfield at the microchannel junction. . . . . . . . . . . . . . . . . . . . . . 14
3.1 Schematic of a linear polymer in a coiled (near equilibrium) and ex-tended conformation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Coarse-graining a series of Kuhn segments with an equivalent bead-spring dumbbell. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Capillary electrophoresis (rectangular channel) with pressure-driven flowshowing co-current migration across the streamlines. . . . . . . . . . . . 32
3.4 Capillary electrophoresis (rectangular channel) with pressure-driven flowshowing counter-current migration across the streamlines. . . . . . . . . 32
3.5 Scatter plot of the chain stretch of ds-DNA as a function of the Henckystrain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.6 Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch for WiE = 3. . . . . . . . . . . . . . . . . . . . . . . . 36
3.7 Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch for WiE = 30. . . . . . . . . . . . . . . . . . . . . . . 36
3.8 Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch for WiE = 90. . . . . . . . . . . . . . . . . . . . . . . 37
4.1 Simulation of a polymer in a T-channel with Wi = 2 and WiE = −3.96. 42
vi

4.2 Combined flow and field streamlines in a Cross channel with Wi = 2and WiE = −3.96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3 Simulation of a polymer in an ideal combination of an elongationalelectric field and fluid flow. Position of the center of mass plotted as afunction of time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4 Simulation of a polymer in an ideal combination of an elongationalelectric field and fluid flow. The stretch of the molecules plotted as afunction of time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.5 Polymer dumbbell in a combination of elongational electric field andfluid flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.6 Residence time of polymer and rigid sphere plotted versus trajectorynumber for Wi = 12.24,W i+WiE = 2 . . . . . . . . . . . . . . . . . . 48
5.1 Trapping of a rigid rod in an elongational flow and field. . . . . . . . . . 53
5.2 Trapping of a rigid rod in an elongational flow and field. . . . . . . . . . 54
5.3 Trapping of a rigid rod in an elongational flow and field. . . . . . . . . . 54
6.1 Schematic illustration of ‘Replica Molding’. . . . . . . . . . . . . . . . . 56
6.2 Illustration of some of the experimental methods used. . . . . . . . . . . 58
6.3 Plot of mean-squared displacement as a function of lag time for 1µmdiameter carboxylated Polystyrene microspheres visualized at equilibrium. 60
6.4 Streaklines of Polystyrene microspheres in fluid flow in a T-channel . . . 62
6.5 Streaklines of Polystyrene microspheres in electric field in a T-channel . 67
7.1 PMF between pairs of homopolymers at the vapor-liquid interface. . . . 70
7.2 PMF between pairs of homopolymers in bulk water. . . . . . . . . . . . 70
7.3 Radial distribution function g(r) versus bead separation (r/L) for the2-D Brownian dynamics simulation of polymers at a vapor-liquid interface. 73
7.4 Verification of the BD Simulation: Fitting the pair correlation functionto the Boltzmann distribution of the applied potential . . . . . . . . . . 73
7.5 Homopolymer simulations in bulk water . . . . . . . . . . . . . . . . . . 75
7.6 Homopolymer simulations at the vapor-liquid interface . . . . . . . . . . 75
7.7 VMD snapshot of the system of homopolymers at the vapor-liquid in-terface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
vii

7.8 VMD snapshot of the system of homopolymers at the vapor-liquid in-terface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.9 VMD snapshot of the system of homopolymers at the vapor-liquid in-terface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
A.1 Illustration of a point force and its image near an infinite plane wall. . . 80
A.2 Illustration of a polymer dumbbell and its images in the two walls . . . 83
viii
ACKNOWLEDGMENTS
I thank my advisor Professor Patrick T. Underhill for his guidance, patience
and support. He has played a major role in the development of this thesis and kept
me motivated throughout my graduate studies.
I am grateful to my doctoral committee members Professor Shekhar Garde,
Professor Joel L. Plawsky and Professor Chang Y. Ryu. They have provided feed-
back, asked insightful questions and helped me whenever I contacted them.
I would like to thank Professor Garde’s group for collaboration on the interface
simulations. I thank the services of Mr. Robert Healey, who has assisted us in
maintaining our computer cluster. I also thank the Engineers at the RPI Cleanroom,
Mr. Bryant Colwill and Dr. Kent Way, for their technical assistance. I am thankful
to Rose Primett, Lee Vilardi, Sharon Sorell and Jennifer Krausnick who have helped
me and other graduate students in the CBE department in many ways.
I am grateful to my mentors during my undergraduate studies, who have in-
spired me to pursue graduate studies. My thanks to Professor R.P. Singh, Professor
Pramod Kumar and Professor P.K. Kamani from HBTI.
My research group members have helped me with great discussions and have
also been fun to work with. Special thanks to Dr. Rangarajan Radhakrishnan, Dr.
Sandeep Chilukuri, Dr. Yaser Bozorgi and Dr. Suhas Rao. I also thank Purba
Chatterjee, Yuzhou Qian and Edmund Tang for their support.
I had the privilege of mentoring several undergraduate students on my re-
search. Thanks to Michael McIntyre, Hannah Clough, Sylvia Szafran and Seth
Ludwig.
Heartfelt thanks to my brother Dhruv, parents Vijay and Mala Pandey, rela-
tives and friends for being there for me all the way.
ix

ABSTRACT
Many separation techniques rely on different physical or chemical character-
istics of the objects being separated. This includes separations based on size, total
charge, or strength of interaction with a substrate. Recently there are many con-
texts in which it is important to manipulate or separate objects with much more
subtle differences. For example, there has been significant interest in separating
cells with different deformabilities because disease states can lead to changes in flex-
ibility or stiffness, as observed in the red blood cells in sickle cell anemia. Proteins
are another example in which manipulating molecules based on their flexibility or
deformability (e.g. due to unfolding or di-sulfide bonds) is currently challenging.
Further, genomic-length DNA separation and manipulation has direct applications
in the development of novel DNA mapping and sequencing devices.
Apart from manipulating objects in solution in the cases above, it is also in-
teresting to study the self-assembly of objects at interfaces. Interface mediated
self-assembly of practical interest includes many solutes interacting to form aggre-
gates with internal structures (e.g., fibrils), coatings (e.g., films of heteropolymers
or unfolded proteins), and other larger structures of technological interest forming
over larger time-scales.
With these broad guides in mind, the overarching goal of our work is to gain
a better understanding of the manipulation and separation of objects at the mi-
croscale, both in solution as well as at an interface. The key principle underlying
most of our work is the conformation-dependent electrophoretic mobility of the ob-
ject; as the object changes its conformation, the mobility changes, which leads to a
different electrophoretic velocity and response to electric field gradients.
x

We have developed a computational model that can efficiently simulate the dy-
namics of rigid as well as flexible objects in a combination of electric field gradients
and pressure driven flow, and have used this model to show that conformation-
dependent electrophoretic mobility can be used to trap and manipulate objects. We
are interested in using the predictions from the simulations to design microfluidic
devices to trap and manipulate deformable objects. The interplay between the elec-
tric field and the fluid flow in the microchannels, given the coupled dynamics of
the effective field on these objects and their conformation, can allow for manipula-
tion and stretching in a unique way. We have extended the technique to perform
simulations of the manipulation and trapping of rod-like objects such as Tobacco
Mosaic Virus (TMV). Apart from looking at objects in solution, we have examined
the structure and dynamics of polymers at aqueous interfaces through Brownian
dynamics simulations.
xi

1. MOTIVATION AND OBJECTIVES
1.1 Motivation
The overarching goal of our work is to gain a better understanding of the ma-
nipulation and separation of objects at the microscale, both in solution as well as
at an interface. The key principle underlying most of our work is the conformation-
dependent electrophoretic mobility of the object; as the object changes its confor-
mation, the mobility changes, which leads to a different electrophoretic velocity and
response to electric field gradients.
This principle is illustrated in Figure 1.1. When both a fluid flow and an
electric field are applied, an object sees the net effect of the fluid velocity v and
the mobility dotted into the electric field µ·E. Fluid flow gradients or electric field
gradients can cause the object to deform, which changes µ and the balance between
v and µ·E.
Many separation techniques rely on different physical or chemical character-
istics of the objects being separated. This includes separations based on size, total
Figure 1.1: Illustration of of the principle of conformation-dependent electrophoreticmobility. (a) For a rigid object or a coiled polymer, the object sees thenet effect of the fluid flow v and the electric field contribution µ·E. (b)When a deformable object stretches, the mobility µ will change andtherefore changes the balance between the fluid flow and electric fieldcontributions.
1

2
charge, or strength of interaction with a substrate. Recently there are many contexts
in which it is important to manipulate or separate objects with much more subtle
differences. For example, there has been significant interest in separating cells with
different deformabilities because disease states can lead to changes in flexibility or
stiffness, as observed in the red blood cells in sickle cell anemia. Proteins are another
example in which manipulating molecules based on their flexibility or deformability
(e.g. due to unfolding or di-sulfide bonds) is currently challenging. In our approach,
an electric field gradient is combined with a pressure driven flow. If the object is
deformable or orientable, the change in conformation will change the electrophoretic
mobility, which in turn changes how fast the object moves and is deformed. This
is one example in which the deformation of flexible polymers is important in practice.
Dilute solutions of flexible polymers are not only interesting from a theoretical
standpoint, but also have practical applications such as in enhanced oil recovery [1]
and turbulent drag reduction [2]. From a biological standpoint, it is also known that
flow properties of proteins can serve important biological functions [3–5]. Macro-
scopic properties of polymer solutions are determined by their microstructure [6,7].
Direct observations of double stranded DNA (ds-DNA) have successfully verified
the connection of flow behavior with microstructure [8–14].
Microfluidic [15] systems can replace many conventional macroscale systems
because of their low input of samples and reagents, ability to manipulate small
volumes and high speed of reactions and separations. Further, the processes in mi-
crofluidic systems are conducted at scales more relevant to biological conditions (e.g.
at a size of a single cell). Research is progressing towards a Micro-Total Analysis
System (µTAS), popularly known as a Lab-on-a-chip, which integrates sampling,
3
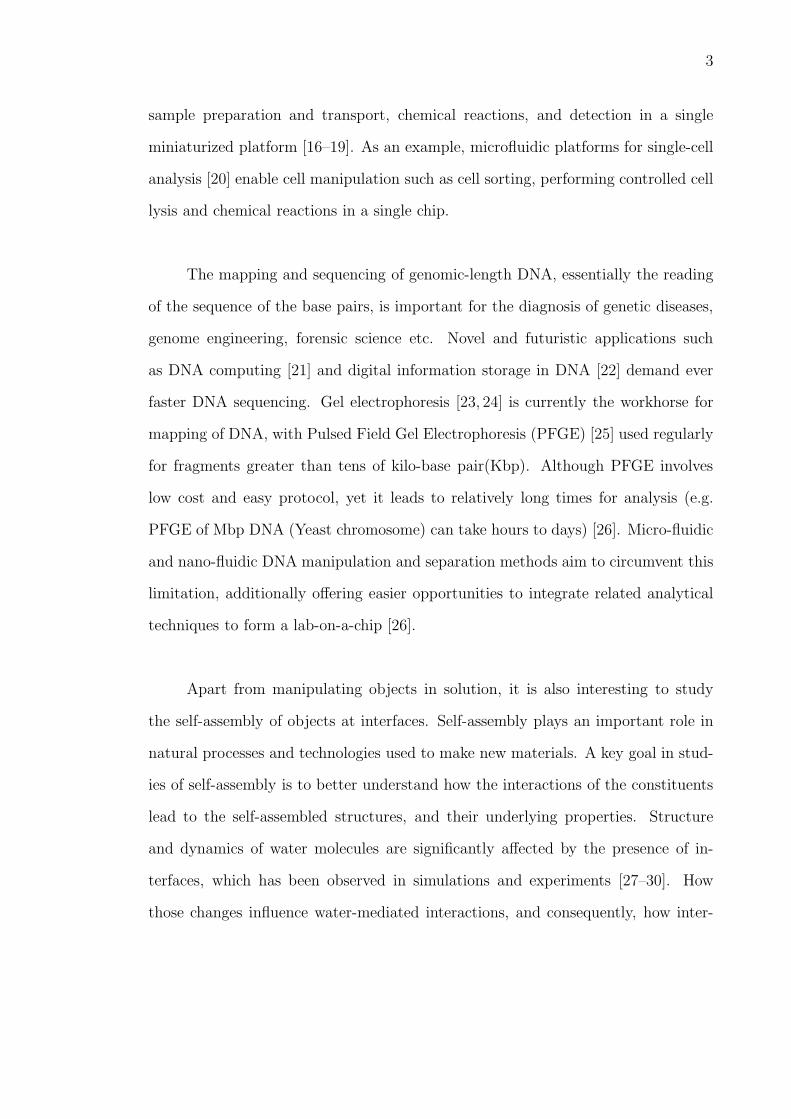
sample preparation and transport, chemical reactions, and detection in a single
miniaturized platform [16–19]. As an example, microfluidic platforms for single-cell
analysis [20] enable cell manipulation such as cell sorting, performing controlled cell
lysis and chemical reactions in a single chip.
The mapping and sequencing of genomic-length DNA, essentially the reading
of the sequence of the base pairs, is important for the diagnosis of genetic diseases,
genome engineering, forensic science etc. Novel and futuristic applications such
as DNA computing [21] and digital information storage in DNA [22] demand ever
faster DNA sequencing. Gel electrophoresis [23, 24] is currently the workhorse for
mapping of DNA, with Pulsed Field Gel Electrophoresis (PFGE) [25] used regularly
for fragments greater than tens of kilo-base pair(Kbp). Although PFGE involves
low cost and easy protocol, yet it leads to relatively long times for analysis (e.g.
PFGE of Mbp DNA (Yeast chromosome) can take hours to days) [26]. Micro-fluidic
and nano-fluidic DNA manipulation and separation methods aim to circumvent this
limitation, additionally offering easier opportunities to integrate related analytical
techniques to form a lab-on-a-chip [26].
Apart from manipulating objects in solution, it is also interesting to study
the self-assembly of objects at interfaces. Self-assembly plays an important role in
natural processes and technologies used to make new materials. A key goal in stud-
ies of self-assembly is to better understand how the interactions of the constituents
lead to the self-assembled structures, and their underlying properties. Structure
and dynamics of water molecules are significantly affected by the presence of in-
terfaces, which has been observed in simulations and experiments [27–30]. How
those changes influence water-mediated interactions, and consequently, how inter-

4
faces mediate self-assembly in their vicinity is however not understood. As a relevant
example of assembly being influenced by a hydrophobic interface, the lag time in
the fibril formation of Alzheimer’s A-β protein fragments was found to be decreased
significantly in the presence of hydrophobic nanoparticles [31], vapor-liquid inter-
faces, or Teflon beads [32]. Interface mediated self-assembly of practical interest
includes many solutes interacting to form aggregates with internal structures (e.g.,
fibrils), coatings (e.g., films of heteropolymers or unfolded proteins), and other larger
structures of technological interest forming over larger time-scales.
1.2 Objectives
The above examples motivate this work that uses simulations and experiments
to examine the behaviour of polymers in fluid flows and electric fields and their as-
sembly at interfaces. We have developed a computational model that can efficiently
simulate the dynamics of rigid as well as flexible objects in a combination of electric
field gradients and pressure driven flow, and have used this model to show that
conformation-dependent electrophoretic mobility can be used to trap and manip-
ulate objects. We are interested in using the predictions from the simulations to
design microfluidic devices to trap and manipulate deformable objects. The inter-
play between the electric field and the fluid flow in the microchannels, given the
coupled dynamics of the effective field on these objects and their conformation, can
allow for manipulation and stretching in a unique way. We have extended the tech-
nique to perform simulations of the manipulation and trapping of rod-like objects
such as Tobacco Mosaic Virus (TMV). Apart from looking at objects in solution,
we have examined the structure and dynamics of polymers at aqueous interfaces
through Brownian dynamics simulations.

5
Briefly, the specific aims of this work are to:
1. Develop a coarse-grained model of conformation-dependent electrophoretic
mobility for both rigid orientable and deformable objects in solution.
(Chapter 3)
2. Perform simulations and experiments of trapping and separation of deformable
objects (ds-DNA) in microfluidic devices using fluid flows and electric fields.
(Chapters 4,6)
3. Perform simulations of trapping and manipulation of rigid objects (Tobacco
Mosaic Virus (TMV)) in microfluidic devices using fluid flows and electric
fields. (Chapter 5)
4. Perform simulations of polymers at aqueous interfaces, to understand the
structure and dynamics of interface-mediated assembly. (Chapter 7)

2. BACKGROUND
2.1 DNA Electrophoresis
Electrostatic Properties of DNA
Deoxyribose Nucleic Acid (DNA) has acidic phosphate groups forming an in-
tegral part of its backbone, which ionize to render it strongly negatively charged
in solution. A charged particle attracts counter-ions from the solvent surrounding
it, and in consort with thermal fluctuations, establishes a local concentration pro-
file called the double layer, as visualized in Figure 2.1. A dense layer of adsorbed
counterions, called the Stern layer, immediately adjoins the DNA chain. This, with
a layer of diffuse charges beyond it, completes the double layer around the DNA
chain. The Poisson-Boltzmann equation governs the exact charge distribution in
the system, which for small zeta potentials, ψo, is linearized by the Debye-Huckel
approximation. Under this linear limit, the counter-ion concentration decays expo-
nentially over a characteristic length scale called the Debye length, λD or κ−1. At
length scales greater than λD, the counter-ions screen the particle’s electric field.
6

7
Figure 2.1: Schematic illustration of the local electrostatics around a DNA coil.Reproduced with permission from [26].
Electro-Hydrodynamic Interactions in DNA
Electrophoresis is the migration of a charged object in a medium due to an
applied electric field. Electrophoretic (EP) mobility µEP is defined as the migra-
tion velocity UEP divided by the electric field strength E (µEP = UEP/E). In the
dynamics of dilute uncharged polymer solutions, it is important to include hydro-
dynamic interactions (HI) in order to capture many dynamical quantities such as
drag on the polymer, diffusivity, and relaxation time spectrum. This is the case
both when the polymer is in an equilibrium coiled state or when the polymer is in
a highly stretched state.
Double-stranded DNA, a charged polymer, undergoes electrophoresis in cap-
illaries with an electrophoretic mobility that is independent of length, even though
the total charge is proportional to length. This was initially surprising since HI [33]
decays slowly as (1/r). HI occur when a force on one part of the polymer causes a
flow which affects other parts of the polymer.

8
Figure 2.2: Illustration of electro-hydrodynamic interactions (EHI) that occur dur-ing electrophoresis. The electric field (E) exerts a force on a polymer seg-ment and also on the Debye layer (light blue, thickness = λD) counter-ions, causing a flow (dark blue,vEHI) that affects other parts of thepolymer. If the conformation is isotropic, these contributions cancel.If the polymer is deformed, these contributions lead to a mobility thatchanges with conformation.
However, when an electric field exerts a force on a charge, it also exerts a force
on the counter-ions in the Debye layer, altering the net flow that is caused. The
functional form of these electro-hydrodynamic interactions (EHI) (Figure 2.2) [34,35]
is determined by the ratio of length scales ‘a’, the size of the object, and ‘λD’, the
Debye length.
In the Smoluchowski limit (a/λD ≫ 1), vEHIi decays exponentially with r.
Whereas, in the Huckel limit (a/λD ≪ 1),
vEHIi = µEP
ij · E =λ2Dqj4πηr3ij
(3rij rij − δ) ·E (2.1)
where vEHIi is the EHI velocity on particle i due to particle j, η is the viscosity
of the medium, rij is the distance between the two segments, rij is a unit vector
pointing from segment i to segment j, δ is the identity tensor, and qj is the charge
on bead j.
It was previously thought that these interactions decayed exponentially with

9
r, thus explaining the weak contour-length dependence of µEP of DNA and other
polyelectrolytes in free-solution electrophoresis [36–38]. This approximation, termed
as Electro-Hydrodynamic Equivalence [39, 40], says that we can replace a consider-
ation of the full electrostatics and hydrodynamics of the polymer chain with the
simple addition of an equivalent external flow due to electrophoresis to the external
fluid flow.
For ds-DNA (Figure 2.1), however, the radius of the double-helix backbone
is much lower than λD = O(10nm) for millimolar salt solutions [41], so the Huckel
limit is clearly applicable, and this equivalence does not hold. The weak contour-
length dependence of µEP can be explained on the basis of spherical averaging of
the polymer conformations at equilibrium, as seen from Equation 2.1. In general,
however, µEP depends on the DNA conformation, and EHI play an im-
portant role in DNA dynamics when the DNA conformation is stretched
and anisotropic. Fluid flow or electric field gradients can lead to this
change in conformation.
Conformation-dependent Mobility
Liao et al. [42] experimentally showed that the electrophoretic mobility of
λ-phage DNA (48, 502 bp, contour length = 21µm) depends both on the chain
stretch and conformation. They used a microscale converging channel to create
an electric field gradient that stretched DNA molecules, and then used video flu-
orescence microscopy to correlate the instantaneous DNA stretch and mobility at
different strain values. As shown in Figure 2.3, their mobilities varied from −0.05 to
−0.35 × (10−8m2/sV ) over a visual length of 1µm to 15µm. Molecular Individual-
ism [43,44], the dependence of DNA unravelling in an extensional field on its starting
conformation, accounted for the wide range of unravelling modes and conformations
obtained therein. They developed a qualitative model to explain the change in mo-

10
Figure 2.3: Distribution of electrophoretic mobility of λ-phage DNA versus DNAvisual length. Each symbol type represents one tracked DNA molecule.Reproduced with permission from [42].
bility seen using Equation 2.1. Because their molecules were very strongly stretched,
the relatively fast r−3 scaling of the disturbance means that the contributions due
to distant polymer segments are small. Instead, it is only the disturbances between
nearby segments that are important. Locally, on the scale of the persistence length
(50nm), the ds-DNA is rigid and acts like a slender cylinder that can be aligned by
a flow or field.
As a DNA molecule is stretched, the backbone of the helix is aligned, which
leads to a change in mobility. Liao et al. developed a model that quantifies this
effect, and it matches their experiments qualitatively. It also helps to explain an
observation that two molecules can have the same stretch but different mobilities.
Consider a molecule that is stretched but folded in half; visually the stretch is only
half the maximum value but the backbone is fully aligned. Therefore it should have
the same mobility as a fully stretched molecule, which it does experimentally.

11
2.2 Field-Flow Fractionation
Applying orthogonal E and V fields
Field-flow fractionation (FFF) is a separation technique where a field is applied
to a fluid (containing analytes) pumped through a long and narrow channel, with
the field typically orthogonal to the direction of flow. The differing mobilities of the
analytes advect them into different axial fluid flow streamlines, leading to different
elution times. Sedimentation, thermal, flow and electrical fields are commonly used
in FFF.
FFF is an extremely versatile separation technique, with the separation of
macromolecules within the range of 103 − 1015gmol−1 and particle sizes ranging
from 1nm − 100µm being reported in literature [45–47]. FFF has been used for
separating a range of bioparticles, like protein aggregates and particles, virus-like
particles, viruses, nucleic acids, lipid vesicles and cells [45, 46, 48].
Applying parallel E and V fields: cross-channel migration
Electric fields have also been applied parallel to the fluid flow. It has been
experimentally observed [49–52] that DNA molecules in capillary electrophoresis
exhibit cross-channel migration when electric and velocity fields are applied in par-
allel (Figure 2.4). The molecules migrate to the channel center if both are applied
in a co-current manner, and to the walls if applied counter-current to each other.
Polymer kinetic theory models [53, 54] and simulations [41] have explained
this phenomenon on the basis of electro-hydrodynamic interactions (EHI) and the
change of electrophoretic mobility with conformation. Kekre et al. [41] used a bead-
spring chain simulation model including explicit EHI (Equation 2.1) between beads
and were able to quantitatively match the experiments. The physical interpretation
of the mechanism is that the pressure-driven flow deforms the conformation of the
DNA, which changes its mobility. This mobility is a tensor, which produces an elec-

12
Figure 2.4: Cross-channel migration of λ-phage DNA in capillary electrophoresis:Center of mass distribution across the channel for co-current (open cir-cles) and counter-current (solid circles) application of an external electricfield and a pressure gradient. The distribution is normalized by the uni-form distribution obtained under no flow and field conditions. Wi andWiE are the non-dimensionalized flow and field strain rates, respectively.Reproduced with permission from [41].
trophoretic velocity perpendicular to the field, leading to migration in the channel.
In this thesis, the DNA is being deformed into highly stretched conformations. At
these stretches, the “global” (or explicit) contribution in the model of Kekre et al.
does not correctly capture the changes in mobility. Therefore, we cannot use their
model in our work. However, the cross-stream migration is an important test of our
model, and in the following chapter we show that our new model is able to capture
the cross-stream migration in capillaries. In our new techniques, we will be using
a combination of fluid flow and electric fields. However, it is important to note
that the implementation is different from field-flow fractionation in that there will
be a stagnation point for both the flow and field. This will allow for trapping and
manipulation of objects at the stagnation point.

13
2.3 Microfluidics for Trapping and Manipulation
Apart from separation using techniques such as field-flow fractionation, it is
also useful to trap objects, because it allows for their systematic manipulation and
study in well-defined and controlled environments. Direct observation and con-
trolled deformation of individual DNA molecules in microfluidic channels [8–14] has
proven to be a revolutionary development that gives insights into the previously in-
accessible regime of single polymer dynamics. A number of studies have performed
stretching of DNA molecules using either extensional fluid flows [10, 13, 14] or elec-
tric fields [55–57] in T- or Cross- shaped microfluidic channels. Such devices have
also been commercially applied to high-throughput DNA mapping devices [58–60].
In this context, the concept of Molecular Individualism [43, 44] described earlier is
particularly important to ensure uniform stretching irrespective of their inlet con-
formation. Therefore the molecules are typically pre-sheared [55]. These are some
of the types of insights that can be gained by visualizing single molecules in such
devices.
Objects in a planar extensional flow in a cross-slot device are trapped passively
along the axis of compression, but are released exponentially rapidly along the axis
of extension (Figure 2.5). In order to stretch a molecule, a relatively large flow rate
or electric field must be used. Under these conditions, a very low-latency active feed-
back control of flows or fields is required in these devices to achieve trapping. Both
electric fields [62,63] and hydrodynamic flows [61,64,65] have been demonstrated to
trap objects using this active control. Other mechanisms of trapping include opti-
cal and magnetic traps [66,67] and trapping of molecules using dielectrophoresis [68]
Besides these proof-of-principle demonstrations, some of the applications of
microfluidic trapping include the sequence detection of single molecules of genomic

14
Figure 2.5: (a) Hydrodynamic trap created by a planar extensional flow field at thejunction of two perpendicular microchannels. (b) The velocity field (top)and the velocity potential well (bottom) for a particle in the flow fieldat the microchannel junction. Reproduced with permission from [61].
length ds-DNA [69], high-throughput cell patterning [70] and studying DNA com-
paction induced due to a polymer with a monovalent salt [71].
We use similar microfluidic devices but use both fluid flows and electric fields.
This, coupled with conformation-dependent electrophoretic mobility, allows us to
separate and manipulate objects not possible with only one or the other.
2.4 Manipulating Polymers at Aqueous Interfaces
Apart from manipulating objects in solution, it is also interesting to study the
self-assembly of objects at interfaces. Self-assembly, a process in which supermolec-
ular hierarchical organization is established without external intervention, plays an
important role in natural processes and technologies used to make new materials.
A key goal in studies of self-assembly is to better understand how the interactions
of the constituents lead to the self-assembled structures, and their underlying prop-

15
erties.
Colloidal self-assembly has advanced our fundamental understanding of mate-
rials ranging from crystals to glasses [72, 73]. But, in many such applications, the
interface only plays a passive anchoring role for the particles, with the assembly
directed by the direct interactions of the colloids, such as electrostatics, magnetic
dipoles etc. Also, research has been done on how non-spherical particles and direc-
tional interactions from asymmetric particles can impact assembly [74]. Our focus
here is on understanding the fundamentals of assembly of polymers at aqueous in-
terfaces, where the interface plays an important role in the assembly.
Evidence of interface-mediated assembly
Various molecules, especially those containing hydrophobic groups, display an
affinity to bind to hydrophobic interfaces. For example, some proteins bind and
unfold at a hydrophobic interface, forming a film. These unfolded structures can be
important in food products, and designing foaming and emulsifying agents.
As a relevant example of assembly being influenced by a hydrophobic inter-
face, the lag time in the fibril formation of Alzheimer’s A-β protein fragments was
found to be decreased significantly in the presence of hydrophobic nanoparticles [31],
vapor-liquid interfaces, or Teflon beads [32]. Amyloid formation at interfaces is of
particular interest due to its relevance to Alzheimer’s and other neuro-degenerative
diseases.
Interface mediated self-assembly of practical interest includes many solutes
interacting to form aggregates with internal structures (e.g., fibrils), coatings (e.g.,
films of heteropolymers or unfolded proteins), and other larger structures of tech-
nological interest forming over larger time-scales.

16
Water at interfaces
Aqueous interfaces have been studied for a long time. Benjamin Franklin’s
experiments to calm the waves on the surface of a lake with a spoon of oil are com-
monly known [75]. Development of impressive experimental and molecular modeling
techniques over the past few decades have revealed a lot about the molecular prop-
erties of water at interfaces. Density profiles of water have been measured at a high
resolution at soft organic liquid-water interfaces [76]. The sigmoidal density profile
of water at the air-water interface has been well-characterized both by experiments
and simulations [77, 78]. More recently, it was shown that the density fluctuations
of water are significantly enhanced near hydrophobic interfaces [27, 28]. Enhanced
fluctuations lead to higher probability and lower free energy of cavity formation
at hydrophobic interfaces, leading to favorable binding of hydrophobic solutes to
such hydrophobic interfaces. Our work aims to extend such simulations to model
supramolecular self-assembly at aqueous interfaces.

3. COARSE-GRAINED MODEL OF
CONFORMATION-DEPENDENT ELECTROPHORETIC
MOBILITY
3.1 Introduction
Many applications of charged polymers involve applying external electric fields
or field gradients to separate, stretch, and manipulate molecules. It is well known
that in free solution the mobility of DNA is approximately independent of length,
which has led to other separation methods such as gel electrophoresis. It was believed
that the independence on length was due to partial screening of the hydrodynamic
interactions between polymer segments.
Recently, it has been shown that the mechanism for this length independence
is due to a cancellation of interactions that only occurs near equilibrium. If the
molecule’s conformation is deformed from equilibrium, the cancellation does not
occur, which leads to interesting and important behaviors.
Simulations and experiments using fluid flow to deform the molecule have
shown that the molecule can migrate across field lines due to variations in elec-
trophoretic mobility. Experiments and theory have also shown that electric field
gradients can stretch molecules and that mobility depends on the conformation.
There have been two main approaches to incorporate the electrohydrodynamic
interactions into theoretical and/or simulation models of electrophoresis. Butler,
Ladd, and coworkers [41] developed a simulation method that includes directly the
long-ranged interactions between far-off segments of a bead-spring chain polymer
model. Lee, Larson, and coworkers [42] developed a model that ignores the long
ranged electrohydrodynamic interactions but includes the local electrohydrodynamic
17

18
interactions within a Kuhn segment. The first approach has been used successfully
when the polymer is weakly deformed from equilibrium. If the method is to work
accurately for large deviations from equilibrium, a large number of springs would
need to be included in the model, increasing the computational cost. The second
approach has been used to qualitatively understand the changes of mobility with
conformation when strongly stretched in field gradients. However, the approach
assumes that the polymer is stretched along the field direction only, and is therefore
not able to capture migration across field lines.
We have developed a coarse-grained Brownian dynamics simulation model that
incorporates the change in mobility with conformation. In this way, we are able to
capture the effects seen in experiments and in more detailed simulations with a
computationally efficient model. In the next sections, we will describe the develop-
ment and advantages of the new model. We will also show that the new model can
both capture the cross-stream migration and the stretch dependent mobility seen
experimentally.
3.2 Model Development
3.2.1 Hydrodynamic versus electrohydrodynamic interactions
In the dynamics of dilute uncharged polymer solutions, it is important to
include hydrodynamic interactions in order to capture many dynamical quantities
such as drag on the polymer, diffusivity, and relaxation time spectrum. This is the
case both when the polymer is in an equilibrium coiled state or when the polymer
is in a highly stretched state (Figure 3.1) . One way to see this mathematically is
to consider a typical polymer segment and calculate the net flow produced by the
other polymer segments. The average velocity on a typical polymer segment is an
integral of the disturbance caused by the other polymer segments. Mathematically,

19
Figure 3.1: Schematic of a linear polymer in a coiled (near equilibrium) and ex-tended conformation.
this is written as
vave =
∫
G · F ρdV (3.1)
where ρ is the density of other polymer segments in a region of volume dV , F is
the force on the fluid by those polymer segments, and G is the Green’s function
that is used to calculate the flow generated in the fluid by that force. In order to
understand the generic differences between hydrodynamic interactions (HI) versus
electrohydrodynamic interactions (EHI), we will make approximations to investigate
the scaling of the integral. For example, we will examine the case in which F is
a constant, so can be removed from the integral. We will also assume that ρ is
approximately constant within the region that the polymer segments occupy. The
key difference between HI and EHI is the dependence of G on angle and the scaling
with r, the separation of two polymer segments. The Green’s function for HI is the
Oseen tensor, which is given by
GHI ∝1
r(rr + I) (3.2)
where r is a unit vector pointing in the radial direction and I is the identity tensor.
The key features are that it scales as r−1 and has a nonzero average over angle.

20
However, the Green’s function for EHI is
GEHI ∝1
r3(3rr − I), (3.3)
which scales as r−3 and has a zero average over angle.
Using these approximations and the characteristics of the Green’s functions,
the average velocity in the equilibrium coiled state for the HI and EHI cases are
vave,HI,eq ∼ F (angular average)
∫ R
ℓ
1
rr2dr (3.4)
vave,EHI,eq ∼ F (angular average)
∫ R
ℓ
1
r3r2dr, (3.5)
where the lower limit of integration ℓ represents the radius at which the far field
Green’s function is no longer valid and R is the radius of the polymer coil. In the HI
case, the angular average is finite, and the radial integral has a dependence on R.
This dependence on the polymer coil size shows that long range HI between polymer
segments within the coil are important. In the EHI case, the radial integral also has
R dependence, but the angular integral vanishes. Therefore, right at equilibrium,
the EHI contributions do not affect the net drag on the polymer coil, which leads
to a mobility that is independent of length in free solution electrophoresis.
When the polymer is strongly stretched (e.g. along the direction of F ) the in-
tegral over polymer segments becomes an integral along a line instead of throughout
a sphere. The average velocities in this stretched state then become
vave,HI,st ∼ F
∫ L
ℓ
1
rdr (3.6)
vave,EHI,st ∼ F
∫ L
ℓ
1
r3dr (3.7)

21
where L is the contour length of the stretched polymer. The HI case again depends
on the size of the polymer (here the contour length). However, for large L, the EHI
case no longer depends on L.
This scaling analysis shows that long ranged hydrodynamic interactions are
important to include both near equilibrium and in an extended conformation. For
electrohydrodynamic interactions, they cancel right at equilibrium and long ranged
interactions can be ignored for long polymers in extended conformations. The simu-
lation approach of Butler, Ladd, and coworkers [41] was to include directly the long
ranged EHI in systems weakly perturbed from equilibrium. They showed that be-
cause the angular symmetry is broken, the EHI is important and leads to migration
across field lines. One disadvantage of the model is that if the polymer is stretched
the long ranged interactions play a very small role. In order to include the role
of short ranged interactions, a large number of beads would need to be included,
increasing the computational cost.
In contrast, the work of Lee, Larson, and coworkers [42] examined highly
stretched chains, and therefore ignored long ranged interactions. Instead they in-
cluded the interactions between two polymer segments within a single rod (Kuhn
length). As the polymer is stretched, the rods are oriented which leads to a change in
the mobility. However, they did not incorporate this contribution into their mobility
that was used in dynamical simulations.
In this work, we use the approach of Lee and Larson to develop a mobility
tensor, then use that mobility tensor in dynamical simulations. This approach is
analogous to Brownian dynamics simulation in which the drag coefficient on a bead
varies with the stretch of the polymer(due to hydrodynamic interactions), though
this drag coefficient is typically taken as a scalar instead of a tensor [79].

22
Figure 3.2: Coarse-graining a series of Kuhn segments (orientation ui) with anequivalent bead-spring dumbbell (orientation Q).
3.2.2 Conformation-dependent mobility
Our modeling approach is to consider the polymer to be a freely-jointed chain
(FJC) which is coarse-grained to a bead-spring chain model. Each spring represents
the free energy of the rods averaged over the configurations of the rods of the polymer
that the spring represents. We will also assign to that spring an electrophoretic
mobility tensor which is derived by considering the mobilities of the underlying
rods. Consider a rod which represents a Kuhn length in the FJC model with unit
vector u along its axis (Figure 3.2).
This rod has an electrophoretic mobility tensor M and drag coefficient tensor
Z which can be written as
Z = ζ‖uu+ ζ⊥(I − uu) (3.8)
M =M‖uu+M⊥(I − uu) (3.9)
where I is the identity tensor. Using the notation in [42], we can writeM‖ = µ0+2µ1
andM⊥ = µ0−µ1, where µ0 and µ1 are functions of the charge density, Debye length,
Kuhn length, solvent viscosity, etc. If the mobility of the rod were isotropic then
µ1 = 0. If the Kuhn segment length is much longer than its width, and the Debye
length is larger than the width but smaller than the Kuhn length, then µ1 ≈ µ0/4.

23
Lee and Larson have described a way of calculating the effective mobility of a FJC
from the mobility. In the notation used here, the effective mobility of the FJC is
denoted by µ and solves
〈Z〉 · µ = 〈Z ·M〉 (3.10)
where the angle brackets denote an average over the orientation distribution of the
rods. This distribution is not isotropic and is restricted by how extended the chain
is; if the chain is near equilibrium the rods will be almost isotropic while if the
chain is stretched the rods will be highly aligned. Our goal is to determine this
distribution from the extension of a spring in the coarse-grained model, calculate
the averages over u to determine the effective mobility of the spring µ, then use
that mobility in the dynamics of the spring.
Consider a spring whose extension vector is denoted as Q (Figure 3.2) and
whose maximum extension is Q0 = NkAk where Nk is the number of Kuhn steps
that the spring represents and Ak is the Kuhn length. The spring with extension Q
represents an average over all FJC configurations for which the end to end vector is
Q. Therefore the extension must be related to the average of a rod Q = NkAk〈u〉.
To simplify the notation, we will denote n ≡ 〈u〉, so that Q/Q0 = n. The stretch of
the spring determines the average of the rod orientation vector, but does not directly
determine the distribution. We follow a similar approach as Lee and Larson and
postulate that the distribution is the one in which the rod is subject to an external
“force” f , and the force is determined such that the average over the distribution is
the correct, known average. Therefore, the probability distribution of rod angles is
P (u) ∝ exp(βf (n) · u) where we have explicitly noted that the force is a function
of the average u and β = 1/(kBT ).
This choice is only self-consistent if we calculate the average angle and obtain
n. Because the distribution is well known, we can calculate the average analytically.

24
This self-consistency requires that we choose the force as
f (n) =L−1(n)
β
n
n(3.11)
where the non-boldface n denotes the magnitude of the vector and L−1 is the inverse
Langevin function (L(x) = coth x − 1/x). Plugging equations (3.8) and (3.9) into
(3.10) and using that u is a unit vector gives the key equation we must solve for the
effective mobility µ
((ζ‖ − ζ⊥)〈uu〉+ ζ⊥I) · µ = (ζ‖M‖ − ζ⊥M⊥)〈uu〉+ ζ⊥M⊥I (3.12)
We must now use the Boltzmann distribution to perform the average of the second
moment of the vector u. This can also be calculated analytically to be
〈uu〉 = (1− 3n
βf)nn+
n
βfI (3.13)
where the hat over the vector means the unit vector in the direction of the vector.
We can see that the effective mobility will be of the form µ = µ‖nn+ µ⊥(I − nn).
Plugging this and equation (3.13) into equation (3.12), we can solve for the effective
mobility parallel and perpendicular to the spring.
µ‖ =(ζ‖M‖ − ζ⊥M⊥)(1− 2n
βf) + ζ⊥M⊥
(ζ‖ − ζ⊥)(1− 2nβf) + ζ⊥
(3.14)
µ⊥ =(ζ‖M‖ − ζ⊥M⊥)
nβf
+ ζ⊥M⊥
(ζ‖ − ζ⊥)nβf
+ ζ⊥(3.15)
In summary, these two equations give the effective mobility of a spring which
represents a FJC where ζ and M are the drag coefficients and mobilities of a rod of
the FJC. Since Q/Q0 = n, n is the fractional extension of the spring, n is a unit

25
vector directed along the spring, and f is given by the self-consistency condition in
equation (3.11). It is useful to point out some important limiting cases of equations
(3.14) and (3.15). This will provide physical insight into the nature of the formulas.
The first special case is M‖ = M⊥. In this limit, the rod has an isotropic
mobility, and the formulas lead to an isotropic mobility for the spring µ‖ = µ⊥.
The second special case is ζ‖ = ζ⊥. In this limit, the drag coefficient is isotropic,
and the formulas lead to a spring mobility which is a linear combination of the rod
mobilities. If the drag coefficient is not isotropic, the spring mobility is still a linear
combination of the rod mobilities but the drag coefficients change how strongly the
rod mobilities are weighted.
The one complication using these effective mobilities in a bead-spring chain
simulation is the inverse Langevin function in equation (3.11). Computing this in-
verse for each spring at each timestep would make the method more computationally
costly. A Pade approximant has been previously developed by Cohen [80] to ap-
proximate the inverse Langevin function. Therefore we will use this approximation
βf = L−1(n) ≈ (3n− n3)/(1− n2). With this approximation, the spring mobilities
become an explicit function of n, the fractional extension of the spring, as
µ‖ =(ζ‖M‖ − ζ⊥M⊥)(
1+n2
3−n2 ) + ζ⊥M⊥
(ζ‖ − ζ⊥)(1+n2
3−n2 ) + ζ⊥(3.16)
µ⊥ =(ζ‖M‖ − ζ⊥M⊥)(
1−n2
3−n2 ) + ζ⊥M⊥
(ζ‖ − ζ⊥)(1−n2
3−n2 ) + ζ⊥(3.17)
As a last step, we generalize this dumbbell model of conformation-dependent
electrophoretic mobility over a bead-spring chain, by averaging the mobility of the
two springs adjoining a bead and assigning it as the mobility represented by that
bead. This averaging approach accounts for chain contiguity in linear polyelec-
trolytes.

26
3.3 Simulation Methodology
In this work we use the standard Brownian Dynamics (BD) simulation method-
ology [81–84]. Since BD can coarse-grain out the fast modes of the solvent, it allows
one to simulate efficiently much larger time-scales than Molecular Dynamics. BD
simulations are particularly well suited to studying the structure and rheology of
complex fluids in various nonequilibrium situations [44, 83, 85, 86].
Here, we coarse-grain our DNA molecule to a bead-spring chain, in which
the solvent and dissolved ions are treated as a continuum that give rise to viscous
drag, Brownian fluctuations, and hydrodynamic interactions. The beads (1 − Nb)
represent the hydrodynamic drag experienced by the molecule, while the springs
represent the entropic restoring force associated with stretching a sub-section of the
chain. We employ a Finitely Extensible Nonlinear Elastic (FENE) [87] spring force
model. This model is linear at small extensions but becomes nonlinear at larger
extensions to prevent the polymer from stretching beyond its finite length, and has
been verified experimentally to capture the elasticity of polymers.
We assume that the electrohydrodynamic interactions only occur between dif-
ferent parts within a rod of the FJC and not between rods. This leads to a mobility
of a spring that depends on conformation (as discussed in the previous subsection).
In the bead-spring chain model, the bead positions are tracked and they are the
points where the hydrodynamic and electric field forces are applied. The stochastic
equation for the change in the position of bead i, derived from a force balance on
the bead, is
dri =
[
u∞(ri) +
Nb∑
j=1
Pij ·E(rj) +1
kBT
Nb∑
j=1
Dij · Fj +
Nb∑
j=1
∂
∂rj·Dji
]
dt+√2dt
Nb∑
j=1
Bij ·dWj
(3.18)
where Nb is the number of beads, ri is the position of bead i, u∞ is the imposed

27
external fluid flow evaluated at the position of the bead, Pij is the effective elec-
trophoretic mobility tensor describing how fields at bead j alter the motion of bead
i, E is the external electric field evaluated at the position of bead j, Dij is the
hydrodynamic diffusion tensor, Fj is the net of spring forces and excluded volume
forces on bead j, and dWj is a vector of random variables with zero mean and
variance 1.
In order to satisfy the fluctuation-dissipation theorem [82], the tensor Bij must
obey
Dij =
Nb∑
k=1
Bik ·BTjk (3.19)
Hydrodynamic diffusion tensor in confinement
For a system of point forces acting on the fluid, the velocity v at any given
point in the fluid is the solution to the incompressible Stokes’ flow problem
µ∇2v = ∇p+∑
i
fi δ(r− ri), (3.20)
∇ · v = 0, (3.21)
with the appropriate boundary conditions. In the absence of any forces on the fluid
by the particles, the unperturbed velocity u(ri) = v(ri) at the location of a particle
i. The velocity at point i due to a point force at j can be written in a general form
as
vi = Ωij · fj , (3.22)
where Ωij is known as the hydrodynamic interaction tensor, or Green’s function.
The diffusion tensor is written using the Green’s function as
Dij =kBT
ζIδij + kBTΩij, (3.23)

28
where ζ is the drag coefficient.
In an infinite domain, the velocity perturbation due to a point force is given
by the Oseen-Burgers (OB) tensor [6, 88, 89],
Ωii = 0 (3.24)
Ωij =1
8πηrij
[
I+rijrij
r2ij
]
. (3.25)
The Green’s function for an arbitrary geometry can be expressed as
Ω = ΩOB +ΩW , (3.26)
where ΩOB is the free-space Green’s function and ΩW is the addition that accounts
for the no-slip condition at the walls of the geometry. The velocity due to a point
force acting at rj is then written as
v(r) = vOB(r− rj) + vW (r, rj)
= [ΩOB(r− rj) +ΩW (r, rj)] · fj .(3.27)
The velocity v(r) is calculated from the solution of the incompressible Stokes’
flow problem (equations (3.20) and (3.21)) along with this extra boundary condition
at the walls,
v = vOB + vW = 0. (3.28)
The Stokes flow problem can be numerically solved to calculate ΩW . The hydrody-
namic tensor in equation (3.23) can be written as
Ωij = ΩW (ri, rj) + (1− δij)ΩOB(ri − rj). (3.29)

29
A nonsymmetric diffusion tensor violates the reciprocity relation
Ω(ri, rj) = ΩT (rj, ri), (3.30)
which results from self-adjointness of the Stokes operator [90]. This can be over-
come by the following approach suggested by Jendrejack [91] and Felderhof [92] to
obtain a symmetric positive-semidefinite diffusion tensor, for |rij| ≥ 2a. The wall
correction ΩWij , which is not equal to (ΩW
ji )T , is used to construct a symmetric,
positive-semidefinite tensor by
Ωij =ΩW
ij + (ΩWji )
T
2, (3.31)
Ωji =ΩW
ji + (ΩWij )
T
2, (3.32)
where (ΩWji )
T denotes the tensor transpose of ΩWji . Ω is symmetric as we have
Ωij = ΩTji from equations (3.31) and (3.32).
Further, we discuss our approach of using Blake’s solution [93] to calculate
Wall HI in the Appendix.
Throughout most of the thesis we will utilize our new model which only in-
cludes electrohydrodynamic interactions within a rod of the FJC and not between
rods. These mean that the mobility tensor Pij is zero if i 6= j and equals µi when
i = j.
The springs in the chain have a spring force given by the FENE force relation
[87]
F =HQ
1− (Q/Q0)2(3.33)
whereQ is the extension of the spring, Q0 is the maximum spring extension, andH =
3kBT/(AkQ0). This relation, which is an approximation of the response of a freely-

30
jointed chain, is used to be consistent with the model of electrophoretic mobility
which used a freely-jointed chain. All chains in this work are chosen to approximately
represent λ-DNA which has approximately 200 Kuhn steps in the whole chain. The
beads also interact with an exclude volume potential which represents the preference
of the polymer coils represented by the springs to not be overlapping. This potential
is a soft Gaussian given by [91]
Uevij =
1
2vkBTN
2k,s
(
3
4πS2s
)3/2
exp
(−3 | rj − ri |24S2
s
)
(3.34)
where v is the excluded volume parameter, and Ss is the radius of gyration of an
ideal chain consisting of Nk,s Kuhn segments.
The strength of the fluid flow and electric field is quantified using a dimen-
sionless parameter called the Weissenberg number. The Weissenberg number is
Wi = ǫλ, where ǫ is the fluid velocity gradient and λ is the longest relaxation time
of the polymer. For Wi > 1 the fluid gradients are large enough to stretch the poly-
mer. The strength of the electric field is quantified using WiE = ǫEλ in which the
nominal electrophoretic mobility µo is used to convert electric field gradients into
an effective “velocity” gradient ǫE . In the straight channel simulations, the average
shear rate across the channel is used to obtain Wi; WiE is defined such that when
Wi =WiE , the average fluid flow velocity equals the (uniform) electrophoretic flow
velocity.
Since our polymer model includes explicit bead-bead and wall hydrodynamic
interactions, we employ the theoretical Zimm polymer relaxation time [7] for ob-
taining the Weissenberg numbers.
Our model employs explicit Euler time stepping for simulations which do not
include explicit HI between beads and uses Fixman’s mid-point time stepping algo-
rithm [94] for simulations which include HI.

31
Having developed our coarse-grained model for conformation-dependent elec-
trophoretic mobility, we ran simulations to verify that our model correctly captures
experimental observations that rely on conformation-dependent mobility of ds-DNA.
3.4 Model Verification
3.4.1 Straight channel migration
One important observation in both experiments and simulations that results
from conformation-dependent electrophoretic mobility is the migration of polyelec-
trolytes across streamlines in straight channels with both pressure-driven flow and
electric fields applied in a parallel manner. Therefore, this acts as an important
validation of our new coarse-grained model.
The results of [49] describe a mechanism for the migration. Specifically, the
pressure-driven flow will deform the polymer from its coiled and isotropic state.
This change in conformation changes the mobility. In particular, the major axis of
the radius of gyration tensor is tilted at an angle relative to the electric field which
leads to a migration velocity across the channel.
Our coarse-grained model can undergo the same mechanism but in which the
reason for the change in mobility and the way it is captured in the model are
different. In the model of [41], the beads which can be relatively far apart along the
polymer contour directly interact with electrohydrodynamic interactions. Instead,
our model only includes the interactions within a single rod of each Kuhn segment,
which gives a spring a mobility that depends on its extension and orientation.
In the simulations, a parabolic fluid velocity profile u∞ is imposed along with
a constant electric field E. The fluid flow is in the x-direction and is given by
u∞x = γH(1− (y/H)2), where γ is the average shear rate, y is the distance from the

32
Position of CM in Channel (y/H)-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
P(y
/H)
0
1
2
3
4
5
6
7
Figure 3.3: Capillary electrophoresis (rectangular channel) with pressure-drivenflow showing migration across the streamlines for co-current opera-tion (migration towards the center). The four models used are (i)explicit EHI in 5-bead chain (red,squares), (ii) new model with onespring (blue,diamonds), (iii) new model with 5-bead chain, including HI(green,circles), and (iv) new model with 10-bead chain (black,crosses).Wi = 0.9 and WiE = 1.9254.
Position of CM in Channel (y/H)-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
P(y
/H)
0
2
4
6
8
10
12
14
16
18
20
Figure 3.4: Capillary electrophoresis (rectangular channel) with pressure-driven flowshowing migration across the streamlines for counter-current opera-tion (migration towards the walls). The four models used are (i)explicit EHI in 5-bead chain (red,squares), (ii) new model with onespring (blue,diamonds), (iii) new model with 5-bead chain, including HI(green,circles), and (iv) new model with 10-bead chain (black,crosses).Wi = 0.9 and WiE = −1.9254.

33
center of the channel, and H is the half height of the channel. The strength of the
fluid flow is quantified by a Weissenberg number as Wi = γτ where τ is the longest
Rouse relaxation time given by τ = ζ/(8H sin2(π/(2Nb))).
The electric field points parallel to the x-direction, is uniform across the chan-
nel, and with strength quantified by an electric Weissenberg number WiE . Because
the electric field is uniform, this is not defined using a gradient of the electric field.
Instead, it is defined such that WiE = Wi corresponds to the condition when µ0E
equals the mean fluid flow. With this definition, WiE = 3µ0Eτ/(2L). The experi-
ments and simulations correspond to Wi = 0.9 and WiE = ±1.9254.
We have simulated a dumbbell, 5-bead chain and 10-bead chain polymer mod-
els in the straight channels. In addition to simulating with our new coarse-grained
mobility model, we also did simulations with the older model of [41] to verify our
model. The polymer simulations represent an average of 50 trajectories, with initial
conformations for each obtained from long-time decorrelated runs. Each trajectory
is run for 20 wall diffusion times, which captures sufficient data across the channel
width for each trajectory.
Figures 3.3 and 3.4 show the straight channel migration results for our model.
We plot the normalized probability distribution of the polymer’s center-of-mass
versus the position of its center-of-mass across the channel width. The four models
shown are: (i) Butler’s Explicit EHI model in 5-bead chain (red,squares), (ii) new
model with one spring (blue,diamonds), (iii) new model with 5-bead chain, including
HI (green,circles), and (iv) new model with 10-bead chain (black,crosses).
Comparing the Butler’s model (old) with our model, we see that our new model
captures both co-current and counter-current migration accurately when compared
to a previous simulation [41] and experiments [49]. We also see that the number of
beads in the model has a weak effect on the migration, which shows that around

34
5−10 beads are sufficient to capture migration while also achieving a high simulation
efficiency.
The results in this section validate the new model in situations in which the
polymer is weakly deformed from equilibrium and show that the model can capture
migration perpendicular to the electric field. However, one of the main advantages
of the new model is that it can also easily capture the response when the molecule is
highly stretched such as in extensional electric field gradients, which are examined
in the next section.
3.4.2 Stretching in an electric field gradient
Electric field gradients have been used extensively to stretch DNA in microflu-
idic devices. In electrostatics, the electric field has zero curl which can facilitate large
stretching of the DNA. Experimentally it has been observed that DNA molecules
have different mobilities when stretched [42]. When a molecule is stretched in
a strong extensional field, a number of folded and kinked configurations are ob-
served [10, 44]. The work of Larson and coworkers [42] showed that these folds and
kinks can lead to configurations that have the same visual length but a different
mobility. They developed a 1-D model that explained this phenomena by writing
the mobility in terms of the average alignment of a Kuhn segment. In this section,
we show simulations of our 3-D model in extensional field gradients. The dynamics
of the molecules will lead to a variety of configurations including kinks and folds.
In the simulations we impose a planar extensional field given by Ex = ǫEx,
Ey = −ǫEy, Ez = 0 without an external fluid flow. The electric field gradients are
quantified by a Weissenberg number WiE defined by WiE = µ0ǫEτ which uses the
nominal mobility µ0. Note that this definition is different from the one used in the
straight channels in the previous section. Simulations are performed using a polymer
model made of 20 beads (19 springs) so that kinked and folded configurations can

35
0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Hencky Strain Units
Vis
ual (
Str
etch
) Le
ngth
(X
/L)
Figure 3.5: Scatter plot of the chain stretch as a function of the Hencky strain.WiE = 90 for a total of 5 Hencky strain units. The different symbolsrepresent different molecules.
be observed [44].
We performed simulations with our new model at WiE = 3, 30 and 90, for a
total of 5 Hencky strain units each, using a 20 bead-spring chain. For these condi-
tions, the polymer stretches significantly, which allows us to test our model for large
deformations. For each WiE , we ran 50 independent trajectories, with decorrelated
starting configurations for the trajectories obtained from long-time equilibrium (no-
field) runs.
Figure 3.5 shows the time dynamics of stretching of the DNA molecules. We
find that the stretching rate can vary widely based on the initial conformation of
the molecules at the start of extension, which is termed as ‘Molecular Individualism’
[43, 44].

36
Visual (Stretch) Length (X/L)0 0.2 0.4 0.6 0.8
µE/µ
E o
0.9
1
1.1
1.2
1.3
1.4
1.5
Figure 3.6: Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch. WiE = 3 for a total of 5 Hencky strain units. Thedifferent colors/symbols represent different molecules.
Visual (Stretch) Length (X/L)0 0.2 0.4 0.6 0.8 1
µE/µ
E o
0.9
1
1.1
1.2
1.3
1.4
1.5
Figure 3.7: Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch. WiE = 30 for a total of 5 Hencky strain units. Thedifferent colors represent different molecules.

37
0 0.2 0.4 0.6 0.8 10.9
1
1.1
1.2
1.3
1.4
1.5
Visual (Stretch) Length (X/L)
µE/µ
E o
Figure 3.8: Scatter plot of the electrophoretic mobility of ds-DNA as a function ofthe chain stretch. WiE = 90 for a total of 5 Hencky strain units. Thedifferent symbols represent different molecules.
Figures 3.6, 3.7 and 3.8 represent the dynamics of ds-DNA molecules which
stretch in a planar extensional electric field with a WiE = 3, 30, 90 respectively for
a total of 5 Hencky strain units each. The electrophoretic mobilities were obtained
from the instantaneous center-of-mass velocities of the polymer, divided by the
electric field at that position.
The key feature of these plots are that the electrophoretic mobility increases
with increasing stretch, similar to experiments [42]. For lower WiE they all basi-
cally fall on the same curve which is how the stretch of a spring behaves because
there are no significant kinks or folds formed, leading all configurations to stretch
quantitatively similarly.
But for larger WiE there are a variety of curves leading to multiple mobilities
at the same stretch. This, in conjunction with Figure 3.5, shows that the stretching

38
mode and the rate of stretching can vary widely based on the initial conformation
of the molecules at the start of the stretch. Two molecules can have the same
stretch but different mobility. This results from the formation of folds and kinks
in the polymer chain, which can give a high electrophoretic mobility even at low
to moderate visual stretch. Kink dynamics has been analyzed previously using
simulations [44].
3.5 Conclusions
Polyelectrolytes that are deformed in fluid flows and electric fields change
their electrophoretic mobility depending on their conformation. This change is
due to electrohydrodynamic interactions between parts of the polymer. There are
some similarities but key differences with how hydrodynamic interactions lead to
conformation-dependent drag. The changes in mobility occur for even relatively
short polymers, and are approximately a local effect along the polymer backbone
when its is strongly stretched from equilibrium.
In this chapter, we have developed a new coarse-grained model that can be
used for dynamical simulations of polymers like ds-DNA in combinations of fluid
flows and electric fields. The model assigns an electrophoretic mobility tensor to
each bead that is a function of the stretch and orientation of the springs that are
connected to the bead.
The model has been validated in two situations: combined electrophoresis and
pressure-driven flow in a channel with the polymer weakly deformed from equilib-
rium and planar extensional electric field gradients that stretch the polymer far
from equilibrium. In capillary electrophoresis the model captures the cross-stream
migration due to stretching of the chain at an angle to the electric field. In strong
extensional fields the model captures the folded and kinked configurations that have

39
a large impact on the mobility of the chain.
For large electric fields, the model shows the chain can unravel these folds in a
way not seen previously in simulations or experiments. The unique unfolding is due
to the fact that the dynamics are dependent on the location of the center of mass
of the chain even though the electric field gradients are uniform in the system.
This coarse-grained model will allow for rapid simulations in situations with
combinations of electric fields and fluid flows, for example in the trapping and ma-
nipulation of molecules in microfluidic devices which will be shown subsequently.

4. SIMULATIONS OF TRAPPING AND
MANIPULATION OF DEFORMABLE OBJECTS
Having developed a new coarse-grained model of conformation-dependent elec-
trophoretic mobility, elaborated in the previous chapter, we are motivated to apply
the model to simulate both flexible as well as rigid orientable objects with the goal
of either trapping them or manipulating them in different ways.
In this chapter, we discuss simulations of flexible polymers, in both confined
microfluidic geometries as well as infinite elongational fluid flows and electric fields.
An advantage of directly simulating these microfluidic geometries is that we can
perform microfluidic experiments with analogous conditions with an aim to replicate
simulation findings. Simulations of trapping and manipulation of rigid rods will be
elaborated in the next chapter.
4.1 Trapping Objects in Confined Microfluidic Geometries
We have performed simulations using the new Brownian dynamics model of a
deformable polymer molecule in both T- and Cross channels with pressure-driven
flow and electric field gradients applied. The fluid flow velocity and the electric field
is solved once for each microfluidic geometry using ABAQUS software that uses a
Finite Element method to solve Laplace’s equation for the electric potential (and
electric field) and the Navier-Stokes equation for the fluid flow.
For the fluid flow, we have the Navier-Stokes and Continuity equations:
ρ(∂t + v · ∇)v = −∇p + µ2v and (4.1)
40

41
∇ · v = 0 on Ω (4.2)
With a no-slip velocity boundary condition at the wall,
v|wall = 0 on ∂Ω (4.3)
where ρ is the fluid density, v is the fluid velocity, p is the hydrodynamic pressure,
µ is the fluid viscosity, Ω is the fluid domain and ∂Ω represents the fluid boundary.
For the electric potential, we have Laplace’s equation:
∇2Φ = 0 on Ω (4.4)
With either a specified potential boundary condition (at the electrodes) or an
insulating boundary condition (at PDMS or glass surface).
Φ = Φ|given or∂Φ
∂n= 0 on ∂Ω (4.5)
With the electric field defined as E = −∇Φ
where Ω is the fluid domain and ∂Ω represents the fluid boundary.
A cubic mesh is used for the FEM, with a mesh size ∼ the radius of gyration
of the polymer chain. Mesh size independence in our FEM results is verified by
running a finer mesh and comparing the result with the coarser mesh. A look-up
table is made for the velocity and electric field at each discretized point in the
domain, which is linearly interpolated during the course of the BD simulation.
Similar to Chapter 3, we represent the 21µm λ−DNA as a bead-spring chain,

42
Figure 4.1: Simulation of a polymer in a T-channel with Wi = 2 and WiE = −3.96.The green arrows show the effective field seen by a molecule withoutconformation-dependent mobility. The curves show the trajectories ofthe polymers in the simulation with the molecules beginning at thecenter of the channel (X = 0, Y = 0). The red curve shows that amolecule with constant mobility recirculates many times before a Brow-nian fluctuation allows it to leave. The blue curve shows a molecule withconformation-dependent electrophoretic mobility. When the moleculestretches, the mobility changes, which leads to an unbalance that pushesthe molecule away from the T-junction.
and use a 5-bead and a 10-bead model. In this confined microfluidic system, bead
confinement with respect to the boundaries is enforced with a Heyes-Melrose al-
gorithm [95]. Wi is the flow Weissenberg number and WiE is the electrophoretic
Weissenberg number.
One important observation is that molecules can be trapped based on whether
conformation-dependent mobility is important. In particular, we show that for a par-
ticular choice of E and v, a molecule without varying mobility will be trapped while
a molecule that changes its mobility when deformed will pass through the device.

43
Figure 4.2: Combined flow and field streamlines in a Cross channel with Wi = 2and WiE = −3.96. The blue arrows show the effective field seen by amolecule without conformation-dependent mobility.
Figure 4.1 shows the results of these simulations with Wi = 2 and WiE = −3.96.
The molecule without conformation-dependent mobility is trapped in a recircula-
tion region of the streamlines. In contrast, when the molecule with conformation-
dependent mobility stretches in the T, the mobility increases, which makes the E
field contribution dominate. This electric field pushes the molecule rapidly through
the T. Figure 4.2 shows the combined flow and field streamlines in a Cross channel
with Wi = 2 and WiE = −3.96. The symmetry in the Cross channel leads to
the formation of four recirculations in the effective field streamlines, which can be
similarly used to trap objects.
The mechanism for these dynamics is important and interesting because it
relies on a coupling between the dynamics of the molecule and the effective field
causing those dynamics; the deformability of a molecule alters the effective field
that it sees and how that field pushes the molecule through the device and deforms
it. An important feature to the dynamics seen here is that even when Wi and WiE
are similar in magnitude, the effective fields do not exactly cancel. This is what leads

44
to the recirculation region that traps the molecule without conformation-dependent
mobility.
The difference in fields results from a difference in boundary conditions for
the electric field and the fluid velocity. The fluid flow must satisfy no slip and
no penetration on all solid surfaces, while the electric field must only have zero
normal component (because glass and PDMS are effectively insulating compared
to the electrolytic solution). If the channel is very thin, the fluid flow will be a
“Hele-Shaw” flow. This flow is locally parabolic in the thin direction with the
mean of the parabolic flow solving the same equation as the electric field. However,
the side walls will impart different boundary conditions. In Figure 4.1, it is the
boundary conditions at the side walls that produce the recirculation regions. From
the simulation, the difference in the elution times for the two species is ∼ 33 polymer
relaxation times, equivalent to ∼ 10s, which is significant and easily observable
experimentally using modern detection methods.
4.2 Manipulating Objects in Unconfined Flows and Fields
In addition to trapping and separating objects based on their deformability,
it is useful to be able to manipulate and deform objects. In this way, we can hold
an object in one place and measure how it responds to external manipulation. This
has been done previously using fluid flows or electric fields, as described earlier in
the Background (Ch.2). Those methods rely on a control scheme to trap an object.
In order to stretch an object, large electric fields or fluid flows must be used. These
will also give rise to relatively high velocities through the device (short residence
times) that must be compensated by the control scheme. One advantage of using a
combination of electric fields and fluid flow is that conformation-dependent mobility
leads to new ways to manipulate the stretch and residence time.

45
Figure 4.3: Simulation of a polymer in an ideal combination of an elongational elec-tric field and fluid flow. All data are for simulations withWi+WiE = 10.This produces a large stretch and short residence time without EHI.With EHI we can manipulate the stretch while keeping long residencetimes. Position of the center of mass as a function of time forWi = 83.33(black), Wi = 120 (green), and Wi = 187.5 (red). For comparison, weshow the center of mass motion for a molecule without conformation-dependent mobility (blue). L is the stretched length of the dumbbelland λ is the longest relaxation time of the dumbbell.
This is shown explicitly in Figures 4.3 and 4.4, in which we show the results
from BD simulations. In these simulations, the molecule is placed at the stagnation
point in a combination of a pure planar elongational electric field gradient and a
pure elongational fluid flow gradient. The data shows a plot of the position of the
molecule center versus time as well as the stretch of the dumbbell model. The stretch
reaches a steady state while the center of mass moves away from the stagnation
point exponentially, just as in conventional elongational fields. However, the key
feature is that by manipulating the Wi and WiE , we produced cases with different
stretches with much longer residence times than those which would be experienced
by a molecule with constant electrophoretic mobility.
Mathematically, we can understand the response using a dumbbell polymer

46
Figure 4.4: Simulation of a polymer in an ideal combination of an elongational elec-tric field and fluid flow. All data are for simulations withWi+WiE = 10.This produces a large stretch and short residence time without EHI.With EHI we can manipulate the stretch while keeping long residencetimes.The corresponding stretch of the molecules as a function of timefor Wi = 83.33 (black), Wi = 120 (green), and Wi = 187.5 (red). Lis the stretched length of the dumbbell and λ is the longest relaxationtime of the dumbbell.
Figure 4.5: Polymer dumbbell in a combination of elongational electric field andfluid flow. The fluid flow Wi is countered by the electrophoretic WiE ,with their sum (Wi+WiE) depicted by the arrows. The polymer dumb-bell has a stretch Q.

47
model (Figure 4.5) and writing the equations that quantify the dynamics of the
center of mass and the vector Q connecting the two beads. For large Wi and WiE ,
Brownian forces will be small compared to the flow and field induced forces, and
the velocity of the center of mass is
drcmdt
= v|cm + µEPspr · E|cm (4.6)
where the fluid velocity and electric field are evaluated at the center of mass. The
dynamics of the vector Q is related to the gradients of the flow and field across the
polymer and is given by
dQ
dt= Q · ∇v + µEP
spr · (Q · ∇E)− 2FC
ζ(4.7)
where FC is the FENE spring connector force. For a pure extensional fluid flow and
electric field gradient, we can simplify these equations. In addition, if (Wi+WiE) >
1, the polymer will be strongly aligned along the flow’s extensional axis (the x
direction) so we only need to write the dynamics in the x direction. These simplified
equations are
dxcmdt
=xcmλ
(
Wi+WiE +4
3
(
µ1
µ0
)
f 2
1− f 2/3WiE
)
(4.8)
dQx
dt=Qx
λ
(
Wi+WiE +4
3
(
µ1
µ0
)
f 2
1− f 2/3WiE − 1
2(1− f 2)
)
(4.9)
where we have used the FENE connector spring force. f is the fractional extension
of the dumbbell and λ is the longest relaxation time of the dumbbell.
The results in Figures 4.3 and 4.4 can be understood using these equations.

48
Trajectory Number0 10 20 30 40 50 60 70 80 90 100
t /λ
0
1
2
3
4
5
Figure 4.6: Plot of the residence time (scaled by the relaxation time) versus tra-jectory number for a polymer with conformation-dependent mobil-ity (dashed), polymer without conformation-dependent mobility (dot-dashed) and a rigid sphere having the same hydrodynamic drag and elec-trophoretic mobility as the polymer (solid). Wi = 12.24,W i+WiE = 2.The dot-dashed and the solid lines overlap.
The fractional extension f is determined from Equation (4.9) by requiring that Qx
does not change in time. In this way, both Wi and WiE will affect the stretch of
the molecule. This value of f can then be placed into Equation (4.8) to determine
the rate at which the molecule leaves the device. Note that the equations have all
terms in common except the spring force 1/(2(1 − f 2)), which diverges when the
molecule is fully extended. The common terms and the sign of the spring force
leads to center of mass dynamics in Equation (4.8) corresponding to molecules that
leave the device. This is only true for deformable objects. When we examine rigid,
orientable objects in Ch.5, we will show trapping of objects without active control.
Additionally, we performed simulations in infinite flow and field (Wi = 12.24,W i+
WiE = 2) with rigid spheres, having the same hydrodynamic drag and electrophoretic
mobility as the polymer, thus serving as controls. Figure 4.6 shows the result of the
simulation. We note that the polymer with conformation-dependent mobility elutes
slowly. The polymer without conformation-dependent mobility is very similar to
49
the rigid sphere in elution time, since both are effectively only acted upon by the
net Wi+WiE = 2. Also, we note that since the flow and fields are strong compared
to Brownian diffusion, the elution times are pretty deterministic between different
simulation runs for all the models.
4.3 Conclusions
In this chapter we have discussed simulations of flexible polymers, in both
confined microfluidic geometries as well as infinite elongational fluid flow and electric
fields. An advantage of directly simulating these microfluidic geometries is that we
can perform microfluidic experiments with analogous conditions with an aim to
replicate simulation findings.
We have shown that in the confined microfluidic geometries, the difference in
the boundary conditions for the fluid flow and the electric field leads to interesting
combined flow streamlines, with recirculating patterns which can trap objects. Of
course, the deformability of a molecule alters the effective field that it sees and how
that field pushes the molecule through the device and deforms it.
In unconfined flows and fields, we have shown through theory and simulations
that conformation-dependent mobility leads to new ways to trap objects as well as
to manipulate the stretch of trapped objects.
5. SIMULATIONS OF TRAPPING AND
MANIPULATION OF RIGID ORIENTABLE OBJECTS
5.1 Introduction
It is important for many applications to be able to manipulate and separate ob-
jects with electrophoretic mobilities that depend on conformation, such as ds-DNA.
Moreover, the mobility can also depend on conformation for a rigid object provided
that the object is nonspherical and orientable. For example, a long slender rigid rod
will have a different mobility depending on the orientation of the rod relative to the
electric field. This orientation can be altered by the fluid flow gradients and electric
field gradients in the devices described here. Therefore, we expect similar principles
developed for polymers to apply to rigid rods. The goal of this work is to test that
hypothesis using computer simulations. An undergraduate student from the CBE
department, Sylvia Szafran, has collaborated on this research.
5.2 Rigid Rod Model
Two important systems of rigid rods that can be manipulated using the tech-
niques in this work are rod-like viruses and carbon nanotubes. Tobacco Mosaic Virus
(TMV) is monodisperse, and has been used by many researchers including for bind-
ing, deposition, and assembly of a variety of inorganic and organic materials [96,97]
and in nanomedicine for the design of nanocontainers and nanovaccines [98]. TMV
has a width of 18nm and a length of approximately 300nm, and is charged due to the
proteins that make up the capsid [99]. The fluorescent probe Cy3-succinimidyl ester
can be attached to the surface for visualization in video fluorescence microscopy.
The diffraction of light limits the ability to resolve the orientation of TMV, but
50

51
the center of mass can still be tracked. The relevant timescale of reorientation due
to Brownian motion is related to the rotational diffusivity as λ = 1/(6Dr). The
rotational diffusivity for TMV has been measured to be 320s−1 [100]. The fluid
flows and electric field gradients used here will be sufficient to align the TMV and
the corresponding changes in electrophoretic mobility will allow for separation. Our
bead-spring dumbbell model, elaborated below, can be used to represent rigid rods
in general, and therefore can be applied to TMV in particular while comparing with
TMV trapping experiments in the future.
We represent the rigid rods as a 2 bead dumbbell, with the difference from
flexible polymers being that the beads in the rigid rod are connected with stiff
Fraenkel springs [101]. The rods are simulated in combination of an ideal elongation
fluid flow and electric field. As in the previous chapter, we define the Weissenberg
numbers Wi and WiE to denote the strength of the fluid flow and the electric field
respectively. In our simulations, the length scale is set to be the length of the rod,
while the time is scaled by the rotational relaxation time of the rod.
Mathematically, we can understand the response of the rigid rods using the
dumbbell model (Figure 4.5) and writing the equations that quantify the dynamics
of the center of mass and the vector Q connecting the two beads. For large Wi and
WiE , Brownian forces will be small compared to the flow and field induced forces,
and the velocity of the center of mass is
drcmdt
= v|cm + µEPspr · E|cm (5.1)
where the fluid velocity and electric field are evaluated at the center of mass. The
dynamics of the vector Q is related to the gradients of the flow and field across the
rod and is given by

52
dQ
dt= Q · ∇v + µEP
spr · (Q · ∇E)− 2FC
ζ(5.2)
where FC is the Fraenkel spring connector force. For a pure extensional fluid flow and
electric field gradient, we can simplify these equations. In addition, if (Wi+WiE) >
1, the rod will be strongly aligned along the flow’s extensional axis (the Z direction)
so we only need to write the dynamics in the Z direction. Applying Equations (5.1)
and (5.2) to a rod and replacing the spring force with a rigid constraint force Fr
leads to
dzcmdt
=zcmλ
(
Wi+WiE + 2
(
µ1
µ0
)
WiE)
(5.3)
dQz
dt=Qz
λ
(
Wi+WiE + 2
(
µ1
µ0
)
WiE − Fr
)
= 0 (5.4)
where the quantity Fr takes on whatever value necessary to keep the rod from
deforming (i.e. dQz
dt= 0). We see from equation (5.4) that conditions exist for which
Fr < 0 and the rigid rod (virus) will be pushed to the stagnation point without
active control.
5.3 Stable Trapping Using Electric and Flow Fields
Using equations (5.3) and (5.4) with Fr being the constraining force for a
Fraenkel spring gives us the range of Wi and WiE where the rod will be trapped.
Figures 5.1, 5.2 and 5.3 show a representative trapped circumstance, with Wi = 10
and WiE = −9.
In Figure 5.1, we show the center of mass components of the rod versus time.
Here the time has been nondimensionalized by the rotational relaxation time of the
rod. We see that the rod is trapped stably along all axes.

53
t / λ0 5 10 15 20 25 30 35 40 45 50
(Cen
ter
of M
ass)
/L
10-5
10-4
10-3
10-2
10-1
100
zyx
Figure 5.1: Trapping of a rigid rod in an elongational flow and field. Center of masscomponents of the rod versus time, nondimensionalized by the rotationalrelaxation time of the rod. Wi = 10, WiE = −9.
In Figure 5.2, we show the rod orientation components versus time. We see
that the rod is almost completely aligned along the Z-direction, which is the along
the flow’s extensional axis.
In Figure 5.3, we quantify the strength of the rod trapping by analyzing the
histogram of the fluctuations in the components of the rod center-of-mass.

54
t / λ0 5 10 15 20 25 30 35 40 45 50
Orie
ntat
ion/
L
-1
-0.5
0
0.5
1zyx
Figure 5.2: Trapping of a rigid rod in an elongational flow and field. Rod orien-tation components versus time, nondimensionalized by the rotationalrelaxation time of the rod. Wi = 10, WiE = −9.
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4
Cou
nts
0
200
400z-center of mass
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
Cou
nts
0
200
400y-center of mass
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
Cou
nts
0
200
400x-center of mass
Figure 5.3: Trapping of a rigid rod in an elongational flow and field. Histogram ofthe fluctuations in the components of the rod center-of-mass. Wi = 10,WiE = −9.

55
5.4 Conclusions
In this chapter we have discussed simulations of rigid rods, in infinite elonga-
tional fluid flow and electric fields.
In these unconfined flows and fields, we have shown through theory and sim-
ulations that conformation-dependent mobility leads to new ways to trap and ma-
nipulate rigid objects. An important advantage of our trapping approach over the
previous experimental work (Ch.2, Background) is that we are able to stably and
passively trap objects along all directions, without requiring any active control of
either the fluid flows or electric fields.

6. MICROFLUIDICS EXPERIMENTS
In this chapter we describe our experiments using ds-DNA and Polystyrene
microspheres in different microfluidic geometries. Firstly, we briefly describe our
experimental setup, in terms of channel preparation, microscopy, imaging and data
analysis. Then we proceed to discuss salient observations from these experiments.
6.1 Channel Preparation
We employ Soft Lithography [102–104] to create custom microfluidic channels.
Briefly, we use a CAD program (CleWin) to design our channels, which are then
Figure 6.1: Schematic illustration of ‘Replica Molding’ : the procedure for castingPDMS replicas from a master having relief structures on its surface.Reproduced with permission from [102].
56

57
printed with high resolution on a transparency. This serves as a mask for transfer-
ring our patterns to a Si wafer using Photolithography. We spin-coat Shipley 1813
positive tone photo-resist onto Pirahna-cleaned 100-oriented Silicon wafers using a
Headway spin coater. Photolithography is then performed using a Karl Suss MJB-3
aligner. We then carry out Deep Reactive Ion Etching (DRIE) using the Alcatel
ICP DRIE equipment. Finally, we measure our channel profile using a Veeco Dektak
8 profilometer.
We then ‘Replica Mold’ [102,103] our microfluidic channels from poly(dimethylsiloxane)
(PDMS), with the etched Si wafer as the mold (Figure 6.1). Replica molding has
several advantages over conventional photolithography to prepare microfluidic chan-
nels, namely that it can generate 3-D and non-planar surfaces, and it can support
a broad range of materials, including a variety of biomaterials [102]. In general,
soft lithography has been found to be well suited for rapid and easy prototyping of
designs [102, 105], with PDMS preferred for robustness and bio-compatibility.
The PDMS device and a glass coverslip (No. 1, 24 × 60 mm) are treated
with an O2 plasma (PDC-32G, Harrick Scientific) and bonded together, creating
channels with the bottom made of glass and the top and sides made of PDMS. Our
channels typically have an arm length of 0.8cm and a cross-section of width 50µm
and depth ranging from 2.5µm to 25µm. Holes are bored in the PDMS to provide
fluidic connections at the channel arms. These range from a diameter of 4.22mm
bored by a Harris micro punch to 27gage (0.41mm) bored by Luer stubs (27 gage,
Instech Laboratories Inc).
We use Hamilton Gastight syringes ranging in volumes from 0.5µL to 500µL,
connected to the PDMS channel via Polyethylene tubing (PE-20, Instech Labora-
tories Inc). Stainless steel stubs (SS-304, 25 gage; McMaster Carr) are inserted
into the PDMS channels and act both as fluidic connectors and electrodes. Syringe

58
pumps (Fusion 400, Chemyx) and voltage generators (Model 677B, Trek) are used to
drive low Reynolds number flows [33] and electric fields in the channels. Ultrapure
water for our experiments is obtained from a Seimens Labostar ultrapure water sys-
tem. We use diluted Tris-Borate-EDTA (TBE) (Sigma Aldrich) as the electrolytic
buffer for suspending both microspheres and λ-DNA. The TBE buffer was purified
by syringing with a 0.2µm syringe filter (Acrodisc, Pall Corporation).
6.2 Microscopy, Imaging and Data Analysis
Experiments using the microfluidic devices are visualized on an inverted epi-
fluorescence microscope (Zeiss AxioObserver Z1) as shown in Figure 6.2(a). We use
40X air objectives and the 63X and 100X oil-immersion objectives. We calibrate
our objectives with a standard glass calibration slide for all our cameras to convert
lengths in pixels in the microscopic image into physical lengths (in µm). Movies
are taken of the motion of fluorescently- labeled objects that can be analyzed to
quantify the positions, velocities, and stretch of objects. Fluorescent microspheres
are used as controls as objects that cannot deform and change their mobility. Figure
6.2(b) shows a snapshot of microspheres in flow in a T-channel. Because of the large
Figure 6.2: Illustration of some of the experimental methods used. (a) PDMS mi-crochannel on an inverted epi-fluorescence microscope. (b) Image of0.5µm fluorescent microspheres in flow in a T-shaped microchannel.Dashed lines illustrate the positions of the channel walls. (c) Zoomed-inimages of dyed λ-DNA in a coiled configuration (top) and a stretchedconfiguration in a fluid flow (bottom).

59
fluorescent intensity, they can be imaged on high speed sCMOS cameras (Andor Zyla
camera, Zeiss AxioCam MRm camera and Moticam 2300 camera). λ-DNA (Nippon
Gene Co, Japan) is dyed with TOTO-1 (Invitrogen) [9–12] which intercalates into
the double helix. Because of the lower fluorescence, it necessitates the use of an
Electron Multiplying Charge Coupled Device (EMCCD) camera (Andor IXon3),
capable of single-photon capture, to record movies of the molecules.
Figure 6.2(c) shows an example image of λ-DNA both at equilibrium (in a
coil) and stretched by an external fluid flow. In the technique of video fluorescence
microscopy, each image of a movie is processed to determine the position and size
of each object using tracking codes [106, 107] written in an image analysis soft-
ware called Interactive Data Language (IDL). Briefly, the steps involved in particle
tracking include:
• Noise reduction in the images.
• Locating objects of interest.
• Refining location estimates and particle discrimination.
• Linking particle locations into trajectories.
The movement of an object from one frame to the next frame can then be
used to calculate the velocity of the object, which, coupled with its instantaneous
conformation, gives complete insight into its dynamics.
6.3 Observations At Equilibrium
Tracking Polystyrene microspheres at equilibrium
To verify our microscopy setup and our particle tracking codes, we track neu-
trally buoyant Polystyrene microspheres at equilibrium (no flow) in sealed microscope-
coverslip-wax chambers and in our PDMS channels.

60
Figure 6.3: Plot of mean-squared displacement as a function of lag time for 1µmdiameter carboxylated Polystyrene microspheres visualized at equilib-rium. Theory lines (Red) indicate Brownian diffusion. (a) Microspheresdiluted 1000-fold in 83.34% glycerol (by volume) (viscosity= 64.2cP ) inultrapure water, imaged in a coverslip-wax chamber. (b) Microspheresdiluted 1000-fold in ultrapure water, imaged in a straight PDMS chan-nel.
Figure 6.3 shows the Mean-Squared Displacement (MSD) as a function of lag
time for 1µm diameter carboxylated Polystyrene microspheres visualized at equilib-
rium. The MSD is non-dimensionalized by R2, and the lag time by a self-diffusion
timescale ζR2/KT , where R is the radius of the microsphere, ζ is the hydrodynamic
drag coefficient for the microsphere (obtained from Stokes’ law at low Reynolds num-
bers), K is the Boltzmann constant and T is the absolute temperature.
The error bars for the experimental curves represent statistical error, which is
calculated through block averaging [108]. Theory lines are simultaneously plotted
for both figures and are seen to have a good fit with the experimental data.
6.4 Observations under Fluid Flow
After having verified our microscopy and particle tracking codes through ob-
servations at equilibrium, we performed experiments of visualizing Polystyrene mi-

61
crospheres and ds-DNA in Straight and T-channels with fluid flows of varying flow
rates applied using the Syringe pump.
Figure 6.4 shows the fluid flow streaklines of 0.5µm diameter Carboxylated
Polystyrene microspheres flowing in the T-channel with an applied flow rate of
Q = 0.005µL/min from the top arm controlled through the syringe pump. The
streakline composite image is produced by summing over all the individual frames
of the fluid flow movie. The exposure time for recording the frames is 0.05s.
We then compared the experimentally observed microsphere flow velocities in
the channel inlet arm with theoretical flow velocities calculated from the externally
applied flow rate. We also have the exact velocity field for the T-channel calculated
through ABAQUS FEM, and can compare our experiments with that. Since the
velocity field is non-uniform across the channel cross-section, we make 10 bins across
the cross-section, and track an equal number of microspheres in each bin to get an
accurate velocity profile.
Against a theoretically calculated mean velocity of 66.67µm/s, the experimen-
tal mean velocity equals 61.34µm/s. Further, the experimental velocity profile, in
terms of the ratio Vmax/Vavg, was compared with that computed through ABAQUS
FEM. Against a theoretically computed Vmax/Vavg = 1.91 from ABAQUS, the ex-
periments showed a bit different velocity profile with a Vmax/Vavg = 1.71.

62
Figure 6.4: Streaklines of 0.5µm diameter carboxylated Polystyrene microspheres influid flow in a T-channel. Flow rate Q = 0.005µL/min. 1000X dilutedparticles in ultrapure water observed under a 40X objective.
6.5 Observations under Electric Field
Electro-Osmotic flow
Electro-osmotic flow, which is generated when an electric field is applied across
a channel with charged walls, is present in our devices. This is because the surfaces
used in the microfluidic devices in this work, i.e. glass and PDMS, carry a negative
charge in TBE buffers (pH ∼ 8) from dissociation of -Si(OH)3. The negative surface
charge causes the positive ions in the buffer to accumulate at the surface (in the
O[nm] Debye layer) so that there is a local imbalance of charge in the fluid near
the wall surface. The excess charge in the Debye layer will be positive for PDMS
or glass, so electro-osmotic flow would be towards the negative electrode when an
electric field is applied. Because the fluid is contained by charged walls on all sides,
the fluid moving at the walls drags the remaining fluid in the bulk of the channel.
Under the small Debye layer limit (Smoluchowski limit), a/λD ≫ 1 (a being a
characteristic length scale of the wall), and with the electro-osmotic flow velocity
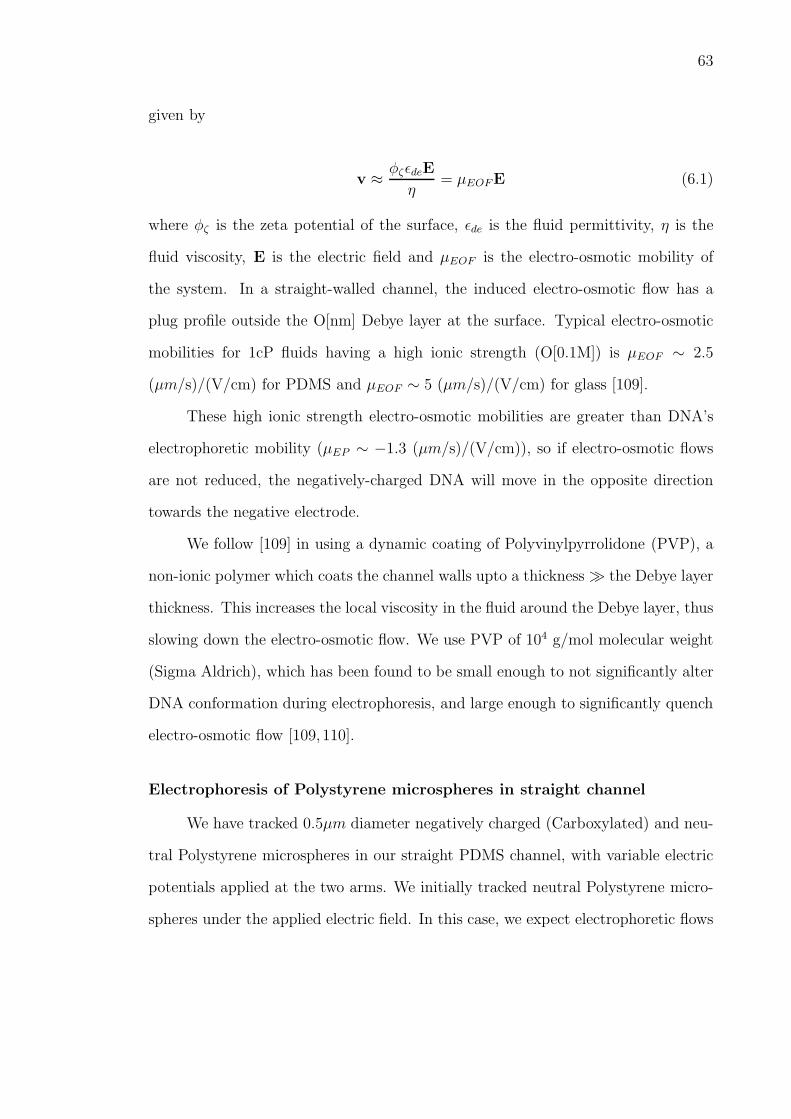
63
given by
v ≈ φζǫdeE
η= µEOFE (6.1)
where φζ is the zeta potential of the surface, ǫde is the fluid permittivity, η is the
fluid viscosity, E is the electric field and µEOF is the electro-osmotic mobility of
the system. In a straight-walled channel, the induced electro-osmotic flow has a
plug profile outside the O[nm] Debye layer at the surface. Typical electro-osmotic
mobilities for 1cP fluids having a high ionic strength (O[0.1M]) is µEOF ∼ 2.5
(µm/s)/(V/cm) for PDMS and µEOF ∼ 5 (µm/s)/(V/cm) for glass [109].
These high ionic strength electro-osmotic mobilities are greater than DNA’s
electrophoretic mobility (µEP ∼ −1.3 (µm/s)/(V/cm)), so if electro-osmotic flows
are not reduced, the negatively-charged DNA will move in the opposite direction
towards the negative electrode.
We follow [109] in using a dynamic coating of Polyvinylpyrrolidone (PVP), a
non-ionic polymer which coats the channel walls upto a thickness ≫ the Debye layer
thickness. This increases the local viscosity in the fluid around the Debye layer, thus
slowing down the electro-osmotic flow. We use PVP of 104 g/mol molecular weight
(Sigma Aldrich), which has been found to be small enough to not significantly alter
DNA conformation during electrophoresis, and large enough to significantly quench
electro-osmotic flow [109, 110].
Electrophoresis of Polystyrene microspheres in straight channel
We have tracked 0.5µm diameter negatively charged (Carboxylated) and neu-
tral Polystyrene microspheres in our straight PDMS channel, with variable electric
potentials applied at the two arms. We initially tracked neutral Polystyrene micro-
spheres under the applied electric field. In this case, we expect electrophoretic flows

64
to be absent, and electro-osmotic flows to dominate. We also tracked Carboxylated
Polystyrene microspheres under the applied electric field. Here, we included PVP
in our electrophoretic buffer to suppress electro-osmotic flow. The results for both
of these sets of experiments are tabulated below.
Table 6.1: Uncharged microspheres in the straight channel with an applied electricfield
φ1 (V) φ2 (V) v (µm/s) µEOF (µm/s)/(V/cm)
120 0 205.38 2.74120 0 207.24 2.76-120 0 188.06 2.51-80 0 141.06 2.82-80 0 142.28 2.8580 0 118.41 2.37
Table 6.2: Electrophoresis of charged microspheres in the straight channel
φ1 (V) φ2 (V) v (µm/s) µEP (µm/s)/(V/cm)
120 0 534.35 -7.13120 0 568.70 -7.59-120 0 491.63 -6.56-80 0 311.13 -6.2280 0 336.64 -6.73
where φ1 and φ2 are the electric potentials at the two arms, v is the ob-
served particle velocity, µEOF is the electro-osmotic flow mobility and µEP is the
electrophoretic mobility.
We note that in Tables 6.1 and 6.2, we calculate the mobilities from the ve-
locities of the particles using the value of the electric field for the straight channel.
For the straight channels, the electric field is uniform and obtained by dividing the
difference in the electric potential at the two arms by the distance between them.
The data in Tables 6.1 and 6.2 can be compared with results in literature.

65
The observed electro-osmotic mobility for PDMS-glass microfluidic devices, with the
same ionic strength buffer as ours has been reported to be ∼ 2.5 (µm/s)/(V/cm)
[109]. The electrophoretic mobility of Polystyrene microspheres in buffers similar to
ours has been reported to be between 5.3-6.4 (µm/s)/(V/cm) [111, 112].
Electrophoresis of λ-DNA in straight channel
λ-DNA (48, 502 kbp, 21 µm contour length) is negatively charged in the weakly
basic TBE buffer, due to the deprotonation of phosphate groups in its chain. We
have tracked λ−DNA in our straight PDMS channel, with variable electric potentials
applied at the two arms. Here, we included PVP [109, 110] in our electrophoretic
buffer to suppress electro-osmotic flow. Bleaching of the dye (TOTO-1) and DNA
chain scission due to exposure to atmospheric O2 and light are the main challenges
in DNA imaging. Therefore we use β-mercaptoethanol (Sigma Aldrich), a strong
reducing agent, in the DNA buffer [109]. Also, we carry out DNA dyeing reactions
and DNA solution storage under a blanket of Argon [109].
The results for these sets of experiments are tabulated below.
Table 6.3: DNA electrophoresis in a straight channel
φ1 (V) φ2 (V) v (µm/s) µEP (µm/s)/(V/cm)
120 0 138.66 -1.27120 0 143.03 -1.31-120 0 65.61 -0.60-120 0 68.89 -0.63100 0 125.06 -1.37-100 0 52.91 -0.58
where φ1 and φ2 are the electric potentials at the two arms, v is the observed
particle velocity and µEP is the electrophoretic mobility.
The data in Table 6.3 can be compared with a literature value of ∼ 1.3

66
(µm/s)/(V/cm) [109]. Apart from working with straight channels, we have also
carried out electrophoresis of λ-DNA and charged microspheres in a T-channel. We
present the electrophoresis of charged microspheres in the following subsection.
Electrophoresis of Polystyrene microspheres in T-channel
We present the results of the set of experiments carrying out electrophoresis
of 0.5µm diameter negatively charged Polystyrene microspheres in the T-channel.
In these set of experiments, PVP was used to suppress electro-osmotic flow.
Table 6.4: Electrophoresis of charged microspheres in a T-channel
φ1 (V) φ2 (V) φ3 (V) µEP (µm/s)/(V/cm)
-200 0 0 -7.23-250 0 0 -6.34-300 0 0 -6.04-350 0 0 -6.15
where φ1,φ2 and φ3 are the electric potentials at the top arm and the two side arms
respectively, and µEP is the electrophoretic mobility.
The data in Table 6.4 can be compared with that in Table 6.2 as well as
literature values between 5.3-6.4 (µm/s)/(V/cm) [111, 112].
Figure 6.4 shows the streaklines of 0.5µm diameter Carboxylated Polystyrene
microspheres under electrophoresis in the T-channel with applied electric potentials
φ1 = −200V, φ2 = φ3 = 0V . The streakline composite image is produced by sum-
ming over all the individual frames of the movie. The exposure time for recording
the frames is 0.05s.

67
Figure 6.5: Streaklines of 0.5µm diameter carboxylated Polystyrene microspheres inelectric field in a T-channel. Electric potential φ1 = −200V, φ2 = φ3 =0V . 1000X diluted particles in ultrapure water observed under a 40Xobjective.
6.6 Conclusions
In this chapter, we elaborate on our experimental methods, which include
microchannel preparation, microscopy and data analysis of the recorded movies. We
initially verify our microscopy and particle-tracking setup by observing microspheres
under equilibrium conditions, and compare the mean-squared displacements with
Brownian diffusion. Following that, we use straight and T-channels to apply fluid
flow and electric fields to charged or uncharged microspheres, as controls, and λ-
DNA, as a flexible negatively charged polyelectrolyte.
Through particle-tracking of the microscopy movies, we calculate the particle
velocities / electrophoretic mobilities, which are then either compared with literature
values, or compared with values computed from FEM simulations.
These results, as a whole, verify our microchannel preparation, microscopy
and particle tracking protocols. They should directly help in our ongoing work on

68
carrying out experiments in which fluid flows and electric fields are simultaneously
applied, and then balanced in a way to achieve selective trapping of objects based
on their conformation.

7. SIMULATIONS OF THE MANIPULATION OF
POLYMERS AT AQUEOUS INTERFACES
7.1 Introduction
Besides understanding manipulation of objects in solution, it is also useful to
study the same at interfaces. Development of impressive experimental and molecular
modeling techniques over the past few decades have revealed a lot about the molec-
ular properties of water at interfaces. Density profiles of water have been measured
at a high resolution at the soft organic liquid-water interfaces [76]. The sigmoidal
density profile of water at the air-water interface has been well-characterized both by
experiments and simulations [77, 78]. More recently, it was shown that the density
fluctuations of water are significantly enhanced near hydrophobic interfaces [27,28].
Enhanced fluctuations lead to higher probability and lower free energy of cavity
formation at hydrophobic interfaces, leading to favorable binding of hydrophobic
solutes to such hydrophobic interfaces. It is interesting to extend such simulations
to model supramolecular self-assembly at aqueous interfaces.
To model supramolecular assembly at interfaces, which spans larger length-
scale and also may occur slowly, the utility of atomistic molecular dynamics (MD)
simulations is limited. To this end, we employ coarse-grained Brownian dynamics
(BD) simulations that use the relevant input from fine-grained MD simulations.
These MD simulations were performed by our collaborators (Vasudevan Venkatesh-
waran, Lijuan Li and Prof. Shekhar Garde). They have quantified the binding to
and the behavior of single homopolymers and pairs of homopolymers in bulk water
and at a vapor-liquid (air-water) interface. We obtained the potentials of mean
force (PMF) between pairs of homopolymers (potentials as a function of the center-
69

70
r (nm)0 0.5 1 1.5 2 2.5
U(r
) (K
J/m
ol)
-2
0
2
4
6
8
10
Figure 7.1: PMF between pairs of homopolymers at the vapor-liquid interface.
r (nm)0 0.5 1 1.5 2 2.5
U(r
) (K
J/m
ol)
-20
-15
-10
-5
0
5
Figure 7.2: PMF between pairs of homopolymers in bulk water.
of-mass separation between polymers) in bulk water and at the air-water interface
(Figures 7.1 and 7.2). The homopolymer simulated is a short C12 chain, which
is hydrophobic. The PMF at the interface quantifies how interfaces affect water-
mediated interactions in their vicinity, compared with water-mediated interactions
in bulk water. Additionally, we obtained the PMF for a single polymer as a function
of the depth from the air-water interface, to quantify the polymer’s affinity to bind
to hydrophobic interfaces.

71
7.2 Simulation Methodology
We coarse-grain the polymer molecule, in its simplest, to a soft bead. To have
the same drag as the polymer molecule, the radius of the bead was assigned to be
the hydrodynamic radius of the homopolymer C12 simulated in MD.
In BD, the stochastic equation for the change in position of bead i, derived
from a force balance on the bead, is
dri =
(
u(ri) +1
kBT
Nb∑
j=1
Dij · Fj +
Nb∑
j=1
∂
∂rj·Dij
)
dt+√2dt
Nb∑
j=1
Bij · dWj (7.1)
where Nb is the number of beads, ri is the position of bead i, u is the external
fluid flow evaluated at the position of the bead, Dij is the hydrodynamic diffusion
tensor, Fj is the sum of non-hydrodynamic forces on bead j, dWj is a vector of
normally distributed random variables with zero mean and variance 1, which models
the Brownian kicks on the bead due to the coarse-grained solvent.
In order to satisfy the fluctuation-dissipation theorem [82], the tensor Bij must
obey
Dij =
Nb∑
k=1
Bik ·BTjk (7.2)
Currently, we do not include explicit hydrodynamic interactions between the
beads. Therefore, Dij reduces to a diagonal form, and ∂∂rj
·Dij vanishes since Dij
becomes position-independent.
We use numerical differentiation in MATLAB to derive a separation-dependent
bead force from the provided discrete PMF data. Further, we carry out cubic spline
interpolation in MATLAB to get piecewise spline functions for the bead force. These
functions are imported into our BD Fortran code and serve as bead forces (included
in Fj in Equation (7.1)).

72
To model the air-water interface, we employ a 2-D simulation box, with peri-
odic boundary conditions to approximate bulk conditions along the simulation plane
(interface).
Initially, we performed a two-bead simulation, wherein the pair correlation
function of the two interacting beads was calculated and fitted on a Boltzmann
distribution based on the applied interaction potential, to verify our BD code. This
is shown in Figure 7.4.
Next, to quantify concentration-dependent ‘phase’ behavior, the concentration
of beads was defined in terms of an Area Fraction (AF), which is the fraction of the
total area occupied by the polymer beads to the area of the 2-D simulation box.
An important note is that, as seen in Figure 7.1, the polymers simulated are soft,
with a somewhat steep U(r) only below r = 0.7nm, as against the polymer radius of
r ∼ 2nm. Therefore, in our simulations, it is possible to squeeze the beads together
to simulate semi-dilute and concentrated solutions of polymer chains at AF values
greater than 1.
Figure 7.3 shows the radial distribution function as a function of bead sep-
aration for the 2-D Brownian dynamics simulation of polymers at a vapor-liquid
interface. Here, the bead separations r are non-dimensionalized by the radius of the
beads L which serves as our length-scale.
As seen from the plots, for a dilute effective area fraction, the radial distribu-
tion function is independent of the number of beads or the simulation box size.

73
0 1 2 3 4 5 6 7 8 9 100.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
(r/L)
g(r)
Figure 7.3: Radial distribution function g(r) versus bead separation (r/L) for the 2-D Brownian dynamics simulation of polymers at a vapor-liquid interface.All the simulations shown are for the same (dilute) effective area fractionof 0.0069. The 2 bead simulation is shown in red, 3 bead in blue, 10bead in green and the 50 bead simulation in black, respectively.
(r/L)0 5 10 15 20 25 30 35
g(r)
0
0.5
1
1.5
2
2.5
Figure 7.4: Verification of the BD Simulation: Fitting the pair correlation functionto the Boltzmann distribution of the applied potential. The pair corre-lation function is shown in solid blue, while the Boltzmann distributionof U(r) is shown in dashed red. U(r) cut-off occurs at r = 2nm

74
7.3 Quantifying the Effect of Polymer Concentration on
Self-Assembly
After having verified our BD simulation code, we ran simulations, both for
homopolymers at the vapor-liquid interface and for homopolymers in bulk water,
for varying area fraction values. Area fraction values were varied between 0.01−10.0.
All the simulations are for a T = 300K. Box size independence was verified for the
simulations.
Polymer beads are initialized uniformly in an appropriately spaced hexagonal
lattice within the 2-D simulation box. The beads are time-stepped using the BD
equation (7.1).
Bulk Water Simulations
Figure 7.5 shows the radial distribution function g(r) versus bead separation
(r/Qo) for various area fractions of homopolymer simulated in bulk water. As shown
from the high peak values of g(r), the hydrophobic homopolymers have a strong
tendency to coalesce together to form a solid phase in bulk water for a wide range
of concentrations, down to very ‘dilute’ polymer concentrations.
Vapor-Liquid Interface Simulations
Figure 7.6 shows the radial distribution function g(r) versus bead separation
(r/Qo) for various area fractions of homopolymer simulated at the vapor-liquid
interface. The wide spread of g(r) for the range of bead separations suggests the
formation of more than one phase in the system.
To verify the existence of these phases, we show snapshots from the AF = 0.3
simulation, obtained through Visual Molecular Dynamics (VMD) [113]. Figures
7.7, 7.8 and 7.9 show these snapshots, confirming the formation of a two-phase
equilibrium of (C12) homopolymers at the vapor-liquid (air-water) interface.

75
Figure 7.5: Homopolymer simulations in bulk water. Radial distribution func-tion g(r) versus bead separation (r/Qo). (a)AF=0.01, (b)AF=1.0,(c)AF=3.0, (d)AF=10.0
Figure 7.6: Homopolymer simulations at the vapor-liquid interface. Radial dis-tribution function g(r) versus bead separation (r/Qo). (a)AF=1.0,(b)AF=3.0, (c)AF=10.0

76
Figure 7.7: VMD snapshot of the system of homopolymers at the vapor-liquid inter-face. AF=0.3. Polymer beads uniformly spaced close to the beginningof the simulation.
Figure 7.8: VMD snapshot of the system of homopolymers at the vapor-liquid in-terface. AF=0.3. Polymer beads showing ‘nucleation’ of another phase.
Figure 7.9: VMD snapshot of the system of homopolymers at the vapor-liquid in-terface. AF=0.3. Two-phase equilibrium reached.

77
7.4 Conclusions
In this chapter, we have extended the MD simulations of short C12 homopoly-
mers, to apply the PMFs obtained from simulating a few polymers via MD into
coarse-grained Brownian dynamics simulations of a large number of homopolymers
at much larger length and time-scales. We have simulated these homopolymers both
in bulk water as well as at a vapor-liquid (air-water) interface. The objective of this
is to study the self-assembly of a large collection of homopolymers, and specifically,
to quantify the effect of polymer concentration on self-assembly.
From our simulations in bulk water, we find that the hydrophobic C12 ho-
mopolymers coalesce together strongly in bulk water, even for a ‘dilute’ polymer
concentration.
On the other hand, from our simulations at the vapor-liquid interface, we find
that these polymers exist in vapor form for ‘dilute’ polymer concentrations. But,
as the polymer concentration is raised, a two-phase equilibrium is reached in such
systems.

8. IMPACT AND FUTURE DIRECTIONS
In this thesis, our overarching goal is to gain a better understanding of the
manipulation and separation of objects at the microscale, both in solution and
at an interface. The key principle underlying our work is the new coarse-grained
model of conformation-dependent electrophoretic mobility, developed by us, which
allows us to efficiently simulate the dynamics of rigid as well as flexible objects in a
combination of fluid flow and electric fields.
We have applied our model to develop new approaches to examine the trapping
and manipulation of objects in microscale geometries, using conformation as the key
separation parameter. An important advantage of our trapping approach over the
previous experimental work (Ch2, Background) is that we are able to stably and
passively trap objects along all directions, without requiring any active control of
either the fluid flows or electric fields.
Our fundamental work on trapping and manipulating both rigid and flexible
objects should spawn new ‘lab-on-a-chip’ devices. Applications include faster DNA
sequencing, bio-sensing, separations, nano-particle and nano-composite synthesis.
Current and future work includes:
• Experiments with ds-DNA: We are currently starting out experiments in
which fluid flows and electric fields are simultaneously applied on a microchip,
and then balanced in a way to achieve selective trapping of objects based on
their conformation.
• Interface Simulations: We are currently discussing with Lijuan Li from
Prof. Garde’s group about her work [114] on using Self Assembled Monolayers
(SAM) to make maze-like patterns through which homopolymers move. The
78

79
hydrophobic alkane homopolymers move over the hydrophobic SAMs and the
hydrophilic SAMs act as a barrier. These maze-like devices have applications
such as in separation, analyte detection etc. It would be interesting to extend
such Molecular Dynamics simulations to simulate, in Brownian Dynamics, the
dynamics of a large number of rigid / flexible objects in such devices, at length
and time-scales corresponding to a real-life microchip.
• Extending the Rod Simulations: We are currently working, along with
an undergraduate student Sylvia Szafran, on extending the rod simulations to
examine semi-flexible objects, using a Worm-Like Chain (WLC) model [115].
It would be interesting to apply our conformation-dependent electrophoretic
mobility model to examine the dynamics of semi-flexible objects.
• Experiments with Rods: For future work, both Tobacco Mosaic Virus and
rigid Carbon Nanotubes can serve as model rigid rod experimental systems.
Fluid flow and electric fields can be applied, analogous to our simulations, to
dilute solutions of rigid rods, image and tracked using microscopy, to study
their trapping in microchips.

APPENDIX A
Calculation of Wall-Mediated Hydrodynamic Interactions
In this appendix, we discuss the simulation method used in Chapter 3 to
include hydrodynamic interactions (HIs) between the polymer and the confining
walls using Blake’s solution [93]. The flow caused by a point force near a no-slip
boundary (as per Blake’s solution) is discussed in section A.1. In section A.2, the
construction of the diffusion tensor for our bead-spring polymer model and the
simulation stepping scheme are discussed.
k2hXY
Z
Image
Point−forceP
r
R
Surface
Figure A.1: Illustration of a point force and its image near an infinite plane wallwith no-slip at the boundary. The net flow at location P is the sum ofthe flows induced due to both the point-force and the image.
80

81
A.1 Blake’s solution for a point force near an infinite plane
wall with no-slip
Consider a system consisting of a point force and its image near an infinite wall
with no-slip at the surface, as shown in figure A.1. The hydrodynamic interaction
tensor required to calculate the flow at any point P above the wall is discussed
here. Our discussion closely follows Blake’s solution [93]. Let i, j and k be the
unit vectors in the x, y and z directions respectively. With the coordinate system
defined in figure A.1, a point force is assumed to be at a distance h vertically from
the surface.
We also define:
• R = (R1i, R2j, R3k) - the vector from the location of the image to the point
P ,
• r = (r1i, r2j, r3k) - the vector from the location of the point force to the point
P , and
• 2hk - the vector from the location of the image to the location of the point
force.
Let r and R denote the magnitudes of the vectors r and R respectively. The
HI tensor Ω with the wall correction calculated by Blake [93] is as follows.
Ω3×3 =
Ω11 Ω12 Ω13
Ω21 Ω22 Ω23
Ω31 Ω32 Ω33
, where each element is given by
Ω11 =1
r+r21r3
− 1
R− R2
1
R3+ 2h
(
h
R3− 3hR2
1
R5+
3hR1R3
R5− R3
R3
)
, (A.1)
Ω12 =r1r2r3
− R1R2
R3+ 2h
(
−3hR1R2
R5+
3R1R3
R5
)
, (A.2)

82
Ω13 =r1r3r3
− R1R3
R3− 4h
(
−3hR1R3
R5+
3R1R3
R5− R1
R3
)
, (A.3)
Ω21 =r2r1r3
− R2R1
R3+ 2h
(
−3hR2R1
R5+
3R2R3
R5
)
, (A.4)
Ω22 =1
r+r22r3
− 1
R− R2
2
R3+ 2h
(
h
R3− 3hR2
2
R5+
3hR2R3
R5− R3
R3
)
, (A.5)
Ω23 =r2r3r3
− R2R3
R3− 4h
(
−3hR2R3
R5+
3R2R3
R5− R2
R3
)
, (A.6)
Ω31 =r3r1r3
− R3R1
R3+ 2h
(
−3hR3R1
R5+
3R23
R5+R1
R3
)
, (A.7)
Ω32 =r3r2r3
− R3R2
R3+ 2h
(
−3hR3R2
R5+
3R23
R5− R2
R3
)
, (A.8)
Ω33 =1
r+r23r3
− 1
R− R2
3
R3− 4h
(
h
R3− 3hR2
3
R5+
3R23
R5− R3
R3
)
. (A.9)
We here note that Ω is nonsymmetric and equation (3.31) is used to obtain a
symmetric hydrodynamic interaction tensor.
A.2 Hydrodynamic diffusion tensor for a bead-spring poly-
mer between two walls
This section discusses the description of the HI tensor for our bead-spring
chain polymer model and the stepping in time of the bead positions via Fixman’s
mid-point algorithm [94]. To elucidate the derivation, we here derive the grand
hydrodynamic diffusion tensor (including wall HI) for a simple polymer dumbbell
model leading to a 6×6 diffusion tensor. In our simulations, we extend the derivation
below for an N bead polymer chain, which leads to a 3N × 3N diffusion tensor.
The two beads, labelled (1) and (2), of the polymer dumbbell and their images
in walls A (1a, 2a) and B (1b, 2b) are shown in figure A.2. Multiple (secondary)
reflections from the walls have been ignored here as their contribution is negligible

83
Wall B
Wall A
2b1b
1 2
2a1a
Figure A.2: Illustration of a representative polymer dumbbell, with beads labelled(1) and (2). The images of the polymer in the walls A (1a,2a) and B(1b,2b) are also sketched.
in comparison to the contribution from the first images. The net flow (due to the
wall HI) at the position of the bead (2) is the sum of the flow due to the bead (1),
and the flow due to the images of the beads (1) and (2) in the two walls (1a, 1b,
2a, 2b). The diffusion tensor D of size 6 × 6 is written using the HI tensors (that
are evaluated from equations (A.1) - (A.9)). This diffusion tensor can be written as
D =
D11 D12
D21 D22
, with each element Dij of size 3× 3 representing the flow due to
the beads and the images. The components of D are
D11 = kBT
[
1
ζI+Ω
image1,1a +Ω
image1,1b
]
, (A.10)
D12 = kBT[
ΩOB1,2 +Ω
image1,2a +Ω
image1,2b
]
, (A.11)
D21 = kBT[
ΩOB2,1 +Ω
image2,1a +Ω
image2,1b
]
, (A.12)

84
D22 = kBT
[
1
ζI+Ω
image2,2a +Ω
image2,2b
]
. (A.13)
Here, I is an identity tensor of size 3 × 3. ΩOB/imagep,q represents the appropriate HI
tensor accounting for the force (point-force/image) at location q to evaluate the flow
at location p. Again, D is made symmetric by using a method similar to equations
(3.31) and (3.32).
Therefore, we re-define Dnew12 and Dnew
21 as
Dnew12 =
D12 +DT21
2, (A.14)
Dnew21 =
D21 +DT12
2. (A.15)
From equation (A.14) and (A.15), we have Dnew12 = (Dnew
21 )T .
Therefore, the diffusion tensor defined as D =
D11 Dnew12
Dnew21 D22
is both positive-
definite and symmetric, and can be used in the stochastic differential equation (3.18).
The numerical integration of this equation can be performed without explicitly
calculating the derivative term ∂∂r
·D [91,94]. We use a finite difference approxima-
tion to estimate the first-order derivative term. Equation (3.18) is rewritten as
r∗ = r+√2B(r) ·∆W, (A.16)
∆r =
[
u(r) +D
kBT· Fsys
]
∆t+
√2
2D(r∗)·[(B−1(r))T ·∆W]+
√2
2B(r)·∆W, (A.17)
where ∆W is a vector of independent random variables from a Gaussian distribution
with a zero mean and variance ∆t. The bead-spring polymer is time-stepped using
the above equations.

REFERENCES
[1] D. Wever, F. Picchioni, and A. Broekhuis, “Polymers for enhanced oilrecovery: a paradigm for structure–property relationship in aqueoussolution,” Progress in Polymer Science, vol. 36, no. 11, pp. 1558–1628, 2011.
[2] C. M. White and M. G. Mungal, “Mechanics and prediction of turbulentdrag reduction with polymer additives,” Annual Review of Fluid Mechanics,vol. 40, pp. 235–256, 2008.
[3] A. Alexander-Katz, M. Schneider, S. Schneider, A. Wixforth, and R. Netz,“Shear-flow-induced unfolding of polymeric globules,” Physical ReviewLetters, vol. 97, no. 13, p. 138101, 2006.
[4] S. Schneider, S. Nuschele, A. Wixforth, C. Gorzelanny, A. Alexander-Katz,R. Netz, and M. Schneider, “Shear-induced unfolding triggers adhesion ofvon Willebrand factor fibers,” Proceedings of the National Academy ofSciences, vol. 104, no. 19, pp. 7899–7903, 2007.
[5] X. Zhang, K. Halvorsen, C.-Z. Zhang, W. P. Wong, and T. A. Springer,“Mechanoenzymatic cleavage of the ultralarge vascular protein vonWillebrand factor,” Science, vol. 324, no. 5932, pp. 1330–1334, 2009.
[6] M. Doi and S. Edwards, The Theory of Polymer Dynamics. OxfordUniversity Press, 1986.
[7] R. B. Bird, C. Curtiss, R. Armstrong, and O. Hassager, Dynamics ofPolymeric Liquids, 2 Volume Set. Wiley-Interscience, 1996.
[8] T. T. Perkins, S. R. Quake, D. E. Smith, and S. Chu, “Relaxation of a singleDNA molecule observed by optical microscopy,” Science, vol. 264, no. 5160,pp. 822–825, 1994.
[9] T. T. Perkins, D. E. Smith, R. G. Larson, and S. Chu, “Stretching of a singletethered polymer in a uniform flow,” Science, vol. 268, no. 5207, pp. 83–87,1995.
[10] T. T. Perkins, D. E. Smith, and S. Chu, “Single polymer dynamics in anelongational flow,” Science, vol. 276, no. 5321, pp. 2016–2021, 1997.
[11] D. E. Smith, H. P. Babcock, and S. Chu, “Single-polymer dynamics insteady shear flow,” Science, vol. 283, no. 5408, pp. 1724–1727, 1999.
85

86
[12] P. S. Doyle, B. Ladoux, and J.-L. Viovy, “Dynamics of a tethered polymer inshear flow,” Physical Review Letters, vol. 84, no. 20, pp. 4769–4772, 2000.
[13] C. M. Schroeder, H. P. Babcock, E. S. Shaqfeh, and S. Chu, “Observation ofpolymer conformation hysteresis in extensional flow,” Science, vol. 301,no. 5639, pp. 1515–1519, 2003.
[14] C. M. Schroeder, E. S. Shaqfeh, and S. Chu, “Effect of hydrodynamicinteractions on DNA dynamics in extensional flow: Simulation and singlemolecule experiment,” Macromolecules, vol. 37, no. 24, pp. 9242–9256, 2004.
[15] T. M. Squires and S. R. Quake, “Microfluidics: Fluid physics at the nanoliterscale,” Reviews of Modern Physics, vol. 77, no. 3, pp. 977–1026, 2005.
[16] A. Arora, G. Simone, G. B. Salieb-Beugelaar, J. T. Kim, and A. Manz,“Latest developments in micro total analysis systems,” Analytical Chemistry,vol. 82, no. 12, pp. 4830–4847, 2010.
[17] E. Livak-Dahl, I. Sinn, and M. Burns, “Microfluidic chemical analysissystems,” Annual Review of Chemical and Biomolecular Engineering, vol. 2,no. 1, pp. 325–353, 2011.
[18] S. Haeberle and R. Zengerle, “Microfluidic platforms for lab-on-a-chipapplications,” Lab on a Chip, vol. 7, no. 9, pp. 1094–1110, 2007.
[19] D. Mark, S. Haeberle, G. Roth, F. von Stetten, and R. Zengerle,“Microfluidic lab-on-a-chip platforms: requirements, characteristics andapplications,” Chemical Society Reviews, vol. 39, no. 3, pp. 1153–1182, 2010.
[20] R. N. Zare and S. Kim, “Microfluidic platforms for single-cell analysis,”Annual Review of Biomedical Engineering, vol. 12, no. 1, pp. 187–201, 2010.
[21] Y. Benenson, “Biomolecular computing systems: principles, progress andpotential,” Nature Reviews Genetics, vol. 13, no. 7, pp. 455–468, 2012.
[22] G. M. Church, Y. Gao, and S. Kosuri, “Next-generation digital informationstorage in DNA,” Science, vol. 337, no. 6102, pp. 1628–1628, 2012.
[23] N. C. Stellwagen and E. Stellwagen, “Effect of the matrix on DNAelectrophoretic mobility,” Journal of Chromatography A, vol. 1216, no. 10,pp. 1917–1929, 2009.
[24] N. C. Stellwagen, “Electrophoresis of DNA in agarose gels, polyacrylamidegels and in free solution,” Electrophoresis, vol. 30, no. S1, pp. S188–S195,2009.
[25] J. Herschleb, G. Ananiev, and D. C. Schwartz, “Pulsed-field gelelectrophoresis,” Nature Protocols, vol. 2, no. 3, pp. 677–684, 2007.

87
[26] K. D. Dorfman, S. B. King, D. W. Olson, J. D. Thomas, and D. R. Tree,“Beyond gel electrophoresis: Microfluidic separations, fluorescence burstanalysis, and DNA stretching,” Chemical Reviews, vol. 113, no. 4,pp. 2584–2667, 2012.
[27] R. Godawat, S. N. Jamadagni, and S. Garde, “Characterizinghydrophobicity of interfaces by using cavity formation, solute binding, andwater correlations,” Proceedings of the National Academy of Sciences,vol. 106, no. 36, pp. 15119–15124, 2009.
[28] A. J. Patel, P. Varilly, and D. Chandler, “Fluctuations of water nearextended hydrophobic and hydrophilic surfaces,” The Journal of PhysicalChemistry B, vol. 114, no. 4, pp. 1632–1637, 2010.
[29] A. J. Patel, P. Varilly, S. N. Jamadagni, H. Acharya, S. Garde, andD. Chandler, “Extended surfaces modulate hydrophobic interactions ofneighboring solutes,” Proceedings of the National Academy of Sciences,vol. 108, no. 43, pp. 17678–17683, 2011.
[30] D. Vaknin, W. Bu, and A. Travesset, “Extracting the pair distributionfunction of liquids and liquid-vapor surfaces by grazing incidence x-raydiffraction mode,” The Journal of Chemical Physics, vol. 129, no. 4,p. 044504, 2008.
[31] S. Linse, C. Cabaleiro-Lago, W.-F. Xue, I. Lynch, S. Lindman, E. Thulin,S. E. Radford, and K. A. Dawson, “Nucleation of protein fibrillation bynanoparticles,” Proceedings of the National Academy of Sciences, vol. 104,no. 21, pp. 8691–8696, 2007.
[32] J. Pronchik, X. He, J. T. Giurleo, and D. S. Talaga, “In vitro formation ofamyloid from α-synuclein is dominated by reactions at hydrophobicinterfaces,” Journal of the American Chemical Society, vol. 132, no. 28,pp. 9797–9803, 2010.
[33] W. M. Deen, Analysis of Transport Phenomena. Oxford University Press,New York, 1998.
[34] J. Ennis and L. White, “Electrophoretic Mobility of a Semi-dilute Suspensionof Spherical Particles with Thick Double Layers and Low Zeta Potentials,”Journal of Colloid and Interface Science, vol. 185, no. 1, pp. 157–173, 1997.
[35] D. Long and A. Ajdari, “A note on the screening of hydrodynamicinteractions, in electrophoresis, and in porous media,” The EuropeanPhysical Journal E, vol. 4, no. 1, pp. 29–32, 2001.
[36] J.-L. Barrat and J.-F. Joanny, “Theory of polyelectrolyte solutions,”Advances in Chemical Physics, vol. 94, pp. 1–66, 1997.

88
[37] G. Manning, “Limiting laws and counterion concentration in polyelectrolytesolutions. 7. Electrophoretic mobility and conductance,” Journal of PhysicalChemistry, vol. 85, pp. 1506–1515, 1981.
[38] J.-L. Viovy, “Electrophoresis of DNA and other polyelectrolytes: Physicalmechanisms,” Reviews of Modern Physics, vol. 72, no. 3, pp. 813–872, 2000.
[39] D. Long, J.-L. Viovy, and A. Ajdari, “Simultaneous action of electric fieldsand nonelectric forces on a polyelectrolyte: Motion and deformation,”Physical Review Letters, vol. 76, no. 20, pp. 3858–3861, 1996.
[40] T. Shendruk, O. Hickey, G. Slater, and J. Harden, “Electrophoresis: whenhydrodynamics matter,” Current Opinion in Colloid & Interface Science,vol. 17, no. 2, pp. 74–82, 2012.
[41] R. Kekre, J. E. Butler, and A. J. Ladd, “Role of hydrodynamic interactionsin the migration of polyelectrolytes driven by a pressure gradient and anelectric field,” Physical Review E, vol. 82, no. 5, p. 050803, 2010.
[42] W.-C. Liao, N. Watari, S. Wang, X. Hu, R. G. Larson, and L. J. Lee,“Conformation dependence of DNA electrophoretic mobility in a convergingchannel,” Electrophoresis, vol. 31, no. 16, pp. 2813–2821, 2010.
[43] P. De Gennes, “Molecular individualism,” Science, vol. 276, no. 5321,pp. 1999–2000, 1997.
[44] R. Larson, H. Hu, D. Smith, and S. Chu, “Brownian dynamics simulations ofa DNA molecule in an extensional flow field,” Journal of Rheology, vol. 43,no. 2, pp. 267–304, 1999.
[45] G. Yohannes, M. Jussila, K. Hartonen, and M.-L. Riekkola, “Asymmetricalflow field-flow fractionation technique for separation and characterization ofbiopolymers and bioparticles,” Journal of Chromatography A, vol. 1218,no. 27, pp. 4104–4116, 2011.
[46] B. Roda, A. Zattoni, P. Reschiglian, M. H. Moon, M. Mirasoli, E. Michelini,and A. Roda, “Field-flow fractionation in bioanalysis: a review of recenttrends,” Analytica Chimica Acta, vol. 635, no. 2, pp. 132–143, 2009.
[47] S. K. R. Williams, J. R. Runyon, and A. A. Ashames, “Field-flowfractionation: addressing the nano challenge,” Analytical chemistry, vol. 83,no. 3, pp. 634–642, 2010.
[48] R. N. Qureshi and W. T. Kok, “Application of flow field-flow fractionationfor the characterization of macromolecules of biological interest: a review,”Analytical and Bioanalytical Chemistry, vol. 399, no. 4, pp. 1401–1411, 2011.
89
[49] J. Zheng and E. S. Yeung, “Anomalous radial migration of single DNAmolecules in capillary electrophoresis,” Analytical Chemistry, vol. 74, no. 17,pp. 4536–4547, 2002.
[50] J. Zheng and E. S. Yeung, “Mechanism for the separation of large moleculesbased on radial migration in capillary electrophoresis,” Analytical Chemistry,vol. 75, no. 15, pp. 3675–3680, 2003.
[51] J. Zheng and E. S. Yeung, “Counting single DNA molecules in a capillarywith radial focusing,” Australian Journal of Chemistry, vol. 56, no. 3,pp. 149–153, 2003.
[52] J. Zheng, H.-W. Li, and E. S. Yeung, “Manipulation of single DNAmolecules via lateral focusing in a PDMS/glass microchannel,” The Journalof Physical Chemistry B, vol. 108, no. 29, pp. 10357–10362, 2004.
[53] O. B. Usta, J. E. Butler, and A. J. Ladd, “Transverse migration of aconfined polymer driven by an external force,” Physical Review Letters,vol. 98, no. 9, p. 098301, 2007.
[54] J. E. Butler, O. B. Usta, R. Kekre, and A. J. Ladd, “Kinetic theory of aconfined polymer driven by an external force and pressure-driven flow,”Physics of Fluids, vol. 19, no. 11, p. 113101, 2007.
[55] G. C. Randall, K. M. Schultz, and P. S. Doyle, “Methods toelectrophoretically stretch DNA: microcontractions, gels, and hybridgel-microcontraction devices,” Lab on a Chip, vol. 6, no. 4, pp. 516–525,2006.
[56] J. Tang and P. S. Doyle, “Electrophoretic stretching of DNA molecules usingmicroscale T junctions,” Applied Physics Letters, vol. 90, no. 22,pp. 224103–224103, 2007.
[57] A. G. Balducci, J. Tang, and P. S. Doyle, “Electrophoretic stretching of dnamolecules in cross-slot nanoslit channels,” Macromolecules, vol. 41, no. 24,pp. 9914–9918, 2008.
[58] E. Y. Chan, N. M. Goncalves, R. A. Haeusler, A. J. Hatch, J. W. Larson,A. M. Maletta, G. R. Yantz, E. D. Carstea, M. Fuchs, G. G. Wong, et al.,“DNA mapping using microfluidic stretching and single-molecule detectionof fluorescent site-specific tags,” Genome research, vol. 14, no. 6,pp. 1137–1146, 2004.
[59] E. Protozanova, M. Zhang, E. J. White, E. T. Mollova, D. T. Broeck, S. V.Fridrikh, D. B. Cameron, and R. Gilmanshin, “Fast high-resolution mappingof long fragments of genomic DNA based on single-molecule detection,”Analytical Biochemistry, vol. 402, no. 1, pp. 83–90, 2010.

90
[60] R. H. Meltzer, J. R. Krogmeier, L. W. Kwok, R. Allen, B. Crane, J. W.Griffis, L. Knaian, N. Kojanian, G. Malkin, M. K. Nahas, et al., “Alab-on-chip for biothreat detection using single-molecule DNA mapping,”Lab on a Chip, vol. 11, no. 5, pp. 863–873, 2011.
[61] M. Tanyeri, E. M. Johnson-Chavarria, and C. M. Schroeder, “Hydrodynamictrap for single particles and cells,” Applied Physics Letters, vol. 96, no. 22,pp. 224101–224101, 2010.
[62] A. E. Cohen and W. Moerner, “Suppressing Brownian motion of individualbiomolecules in solution,” Proceedings of the National Academy of Sciencesof the United States of America, vol. 103, no. 12, pp. 4362–4365, 2006.
[63] Q. Wang and W. Moerner, “Optimal strategy for trapping single fluorescentmolecules in solution using the ABEL trap,” Applied Physics B, vol. 99,no. 1-2, pp. 23–30, 2010.
[64] M. Tanyeri, M. Ranka, N. Sittipolkul, and C. M. Schroeder, “Amicrofluidic-based hydrodynamic trap: design and implementation,” Lab ona Chip, vol. 11, no. 10, pp. 1786–1794, 2011.
[65] M. Tanyeri and C. M. Schroeder, “Manipulation and Confinement of SingleParticles Using Fluid Flow,” Nano letters, vol. 13, no. 6, p. 23572364, 2013.
[66] K. C. Neuman and A. Nagy, “Single-molecule force spectroscopy: opticaltweezers, magnetic tweezers and atomic force microscopy,” Nature Methods,vol. 5, no. 6, p. 491, 2008.
[67] T. T. Perkins, “Optical traps for single molecule biophysics: a primer,” Laser& Photonics Reviews, vol. 3, no. 1-2, pp. 203–220, 2009.
[68] C. L. Asbury, A. H. Diercks, G. van den Engh, et al., “Trapping of DNA bydielectrophoresis,” Electrophoresis, vol. 23, no. 16, pp. 2658–2666, 2002.
[69] R. Dylla-Spears, J. E. Townsend, L. Jen-Jacobson, L. L. Sohn, and S. J.Muller, “Single-molecule sequence detection via microfluidic planarextensional flow at a stagnation point,” Lab on a Chip, vol. 10, no. 12,pp. 1543–1549, 2010.
[70] W. Liu, L. Li, J.-c. Wang, Q. Tu, L. Ren, Y. Wang, and J. Wang, “Dynamictrapping and high-throughput patterning of cells using pneumaticmicrostructures in an integrated microfluidic device,” Lab on a Chip, vol. 12,no. 9, pp. 1702–1709, 2012.
[71] W. Xu and S. J. Muller, “Polymer-monovalent salt-induced DNAcompaction studied via single-molecule microfluidic trapping,” Lab on aChip, vol. 12, no. 3, pp. 647–651, 2012.
91
[72] A. D. Dinsmore, J. C. Crocker, and A. G. Yodh, “Self-assembly of colloidalcrystals,” Current Opinion in Colloid & Interface Science, vol. 3, no. 1,pp. 5–11, 1998.
[73] Y. Xia, B. Gates, Y. Yin, and Y. Lu, “Monodispersed colloidal spheres: oldmaterials with new applications,” Advanced Materials, vol. 12, no. 10,pp. 693–713, 2000.
[74] S. C. Glotzer and M. J. Solomon, “Anisotropy of building blocks and theirassembly into complex structures,” Nature materials, vol. 6, no. 8,pp. 557–562, 2007.
[75] C. Tanford, Ben Franklin stilled the waves: An informal history of pouringoil on water with reflections on the ups and downs of scientific life ingeneral. Oxford University Press, 2004.
[76] M. L. Schlossman, “Liquid–liquid interfaces: studied by X-ray and neutronscattering,” Current Opinion in Colloid & Interface Science, vol. 7, no. 3,pp. 235–243, 2002.
[77] D. Schwartz, M. Schlossman, E. Kawamoto, G. Kellogg, P. S. Pershan, andB. Ocko, “Thermal diffuse x-ray-scattering studies of the water-vaporinterface,” Physical Review A, vol. 41, pp. 5687–5690, 1990.
[78] J. Alejandre, D. J. Tildesley, and G. A. Chapela, “Molecular dynamicssimulation of the orthobaric densities and surface tension of water,” TheJournal of chemical physics, vol. 102, no. 11, pp. 4574–4583, 1995.
[79] R. Radhakrishnan and P. T. Underhill, “Impact of solvent quality on thehysteresis in the coil–stretch transition of flexible polymers in goodsolvents,” Macromolecules, vol. 46, no. 2, pp. 548–554, 2012.
[80] A. Cohen, “A Pade approximant to the inverse Langevin function,”Rheologica Acta, vol. 30, no. 3, pp. 270–273, 1991.
[81] D. L. Ermak and J. A. McCammon, “Brownian dynamics withhydrodynamic interactions,” The Journal of Chemical Physics, vol. 69, no. 4,pp. 1352–1360, 1978.
[82] P. Grassia, E. Hinch, and L. Nitsche, “Computer simulations of Brownianmotion of complex systems,” Journal of Fluid Mechanics, vol. 282,pp. 373–403, 1995.
[83] R. M. Jendrejack, J. J. de Pablo, and M. D. Graham, “Stochasticsimulations of DNA in flow: Dynamics and the effects of hydrodynamicinteractions,” The Journal of Chemical Physics, vol. 116, p. 7752, 2002.

92
[84] C.-C. Hsieh, L. Li, and R. G. Larson, “Modeling hydrodynamic interactionin Brownian dynamics: simulations of extensional flows of dilute solutions ofDNA and polystyrene,” Journal of Non-Newtonian Fluid Mechanics,vol. 113, no. 2, pp. 147–191, 2003.
[85] J. S. Hur, E. S. Shaqfeh, and R. G. Larson, “Brownian dynamics simulationsof single DNA molecules in shear flow,” Journal of Rheology, vol. 44, p. 713,2000.
[86] R. Kekre, J. E. Butler, and A. J. Ladd, “Comparison of lattice-Boltzmannand Brownian-dynamics simulations of polymer migration in confined flows,”Physical Review E, vol. 82, no. 1, p. 011802, 2010.
[87] H. R. Warner Jr, “Kinetic theory and rheology of dilute suspensions offinitely extendible dumbbells,” Industrial & Engineering ChemistryFundamentals, vol. 11, no. 3, pp. 379–387, 1972.
[88] C. W. Oseen, Hydrodynamik, vol. 1. Akad. Verl.-Ges., 1927.
[89] J. Burgers, “Second report on viscosity and plasticity,” Academy of Sciences,Amsterdam, 1938.
[90] C. Pozrikidis, Introduction to theoretical and computational fluid dynamics.Oxford University Press, 2011.
[91] R. M. Jendrejack, D. C. Schwartz, J. J. de Pablo, and M. D. Graham,“Shear-induced migration in flowing polymer solutions: Simulation oflong-chain DNA in microchannels,” The Journal of Chemical Physics,vol. 120, p. 2513, 2004.
[92] B. Felderhof, “Diffusion of interacting Brownian particles,” Journal ofPhysics A: Mathematical and General, vol. 11, no. 5, p. 929, 1978.
[93] J. Blake, “A note on the image system for a stokeslet in a no-slip boundary,”in Proc. Camb. Phil. Soc, vol. 70, pp. 303–310, Cambridge Univ Press, 1971.
[94] M. Fixman, “Implicit algorithm for Brownian dynamics of polymers,”Macromolecules, vol. 19, no. 4, pp. 1195–1204, 1986.
[95] D. Heyes and J. Melrose, “Brownian dynamics simulations of modelhard-sphere suspensions,” Journal of Non-Newtonian Fluid Mechanics,vol. 46, no. 1, pp. 1–28, 1993.
[96] C. M. Soto and B. R. Ratna, “Virus hybrids as nanomaterials forbiotechnology,” Current Opinion in Biotechnology, vol. 21, no. 4,pp. 426–438, 2010.

93
[97] J. K. Pokorski and N. F. Steinmetz, “The art of engineering viralnanoparticles,” Molecular Pharmaceutics, vol. 8, no. 1, pp. 29–43, 2010.
[98] D. E. Cliffel, B. N. Turner, and B. J. Huffman, “Nanoparticle-based biologicmimetics,” Wiley Interdisciplinary Reviews: Nanomedicine andNanobiotechnology, vol. 1, no. 1, pp. 47–59, 2009.
[99] P. D. Grossman and D. S. Soane, “Orientation effects on the electrophoreticmobility of rod-shaped molecules in free solution,” Analytical Chemistry,vol. 62, no. 15, pp. 1592–1596, 1990.
[100] H. Z. Cummins, F. D. Carlson, T. J. Herbert, and G. Woods, “Translationaland rotational diffusion constants of tobacco mosaic virus from Rayleighlinewidths,” Biophysical Journal, vol. 9, no. 4, pp. 518–546, 1969.
[101] C.-C. Hsieh, S. Jain, and R. G. Larson, “Brownian dynamics simulationswith stiff finitely extensible nonlinear elastic-Fraenkel springs asapproximations to rods in bead-rod models,” The Journal of ChemicalPhysics, vol. 124, no. 4, p. 044911, 2006.
[102] Y. Xia and G. M. Whitesides, “Soft lithography,” Annual Review ofMaterials Science, vol. 28, no. 1, pp. 153–184, 1998.
[103] D. Qin, Y. Xia, and G. M. Whitesides, “Soft lithography for micro-andnanoscale patterning,” Nature Protocols, vol. 5, no. 3, pp. 491–502, 2010.
[104] J. M. Sidorova, N. Li, D. C. Schwartz, A. Folch, and R. J. Monnat Jr,“Microfluidic-assisted analysis of replicating DNA molecules,” NatureProtocols, vol. 4, no. 6, pp. 849–861, 2009.
[105] J. A. Rogers and R. G. Nuzzo, “Recent progress in soft lithography,”Materials Today, vol. 8, no. 2, pp. 50–56, 2005.
[106] J. C. Crocker and D. G. Grier, “Methods of digital video microscopy forcolloidal studies,” Journal of Colloid and Interface Science, vol. 179, no. 1,pp. 298–310, 1996.
[107] J. C. Crocker and B. D. Hoffman, “Multiple-Particle Tracking and Two-PointMicrorheology in Cells,” Methods in Cell Biology, vol. 83, pp. 141–178, 2007.
[108] D. Frenkel and B. Smit, Understanding molecular simulation: fromalgorithms to applications, vol. 1. Academic Press, 2001.
[109] G. C. Randall, Single molecule analysis of DNA electrophoresis inmicrodevices. PhD thesis, Massachusetts Institute of Technology, 2006.

94
[110] E. A. Doherty, K. D. Berglund, B. A. Buchholz, I. V. Kourkine, T. M.Przybycien, R. D. Tilton, and A. E. Barron, “Critical factors forhigh-performance physically adsorbed (dynamic) polymeric wall coatings forcapillary electrophoresis of DNA,” Electrophoresis, vol. 23, no. 16,pp. 2766–2776, 2002.
[111] C. F. Duffy, A. A. McEathron, E. A. Arriaga, et al., “Determination ofindividual microsphere properties by capillary electrophoresis withlaser-induced fluorescence detection,” Electrophoresis, vol. 23, no. 13,p. 2040, 2002.
[112] B. Xiong, A. Pallandre, I. le Potier, P. Audebert, E. Fattal, N. Tsapis,G. Barratt, and M. Taverna, “Electrophoretic mobility measurement by laserDoppler velocimetry and capillary electrophoresis of micrometric fluorescentpolystyrene beads,” Analytical Methods, vol. 4, no. 1, pp. 183–189, 2012.
[113] W. Humphrey, A. Dalke, and K. Schulten, “VMD – Visual MolecularDynamics,” Journal of Molecular Graphics, vol. 14, pp. 33–38, 1996.
[114] L. Li and S. Garde, “Binding, structure, and dynamics of hydrophobicpolymers near patterned self-assembled monolayer surfaces,” Langmuir,vol. 30, no. 47, pp. 14204–14211, 2014.
[115] J. F. Marko and E. D. Siggia, “Stretching dna,” Macromolecules, vol. 28,no. 26, pp. 8759–8770, 1995.