Final (Part A) Presentation 31/10/04 Virtual Traffic Signal Presented by: Ron Herman Ofir Shentzer...
23
Final (Part A) Presentation 31/10/04 Virtual Traffic Signal Virtual Traffic Signal Presented by: Ron Herman Ofir Shentzer Instructor: Mr. Mony Orbach Technion – Israel Institute Of Technion – Israel Institute Of Technology Technology Electrical Engineering Department Electrical Engineering Department
-
date post
22-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of Final (Part A) Presentation 31/10/04 Virtual Traffic Signal Presented by: Ron Herman Ofir Shentzer...

Final (Part A) Presentation31/10/04
Virtual Traffic SignalVirtual Traffic SignalPresented by: Ron Herman
Ofir Shentzer
Instructor: Mr. Mony Orbach
Technion – Israel Institute Of TechnologyTechnion – Israel Institute Of Technology
Electrical Engineering DepartmentElectrical Engineering Department

The Basic Idea…One of The major factors in today’s car accidents is driver’s lack of attention.
a solution to this problem is a system whichproduces alerts in real time to the driver.
The system can identify a compromising situation tothe driver, according to pre-defined profiles, that characterize which approach to the traffic sign isdangerous.

Block Diagram Remote DB server
GSM Card
GSM Handler GPS Handler
MySQL
Handler
Local DB server
User InterfaceController
Traffic Signs Container
GPS Card

Design’s DescriptionThe Local DB holds the traffic signs relevant to the vehicle’s present location. This Information is synchronized with the vehicle’s orientation.
The Controller interacts with a Remote DB (holding the entire set of traffic signs) via GSM cellular communication.
A request for update is sent by the Controller to the GSM card, and the relevant data is retrieved from the Remote DB, according to the current location.
Each pre-defined time interval, the Controller unit Checks whether the vehicle is in a compromising situation, and if so, a warning signal is sent to the driver through the User Interface.

Class Diagram
See Attached Word Document…

Class Diagram (Cont.)
MySQL – the local database server.GPS – data manipulations.Controller – information processing.Signs - holds signs types.GUI – the user interface.

Class: MySQL
This class enables access to a mySql server which is used as the local database.
Through it we can query for specific signs’ data necessary for the controller.
This class is an object oriented wrapper for simplifying access to mySql server.

The Local DatabaseThe local DB is implemented using MySQL-server, for better performance and modularity.
Each record in the DB represents a traffic sign of some sort, using the following identifiers:
Area of operation: direction, location, effective- radius, opening-angle.Identity: sign-type, sign-SN. (serial
number) and comment.
(example in next slide…)

The Identifiers In Practice
Visible in this drawing are the Area of operation (the shaded triangle), the
sign’s direction, the work-angle, the effective radius.
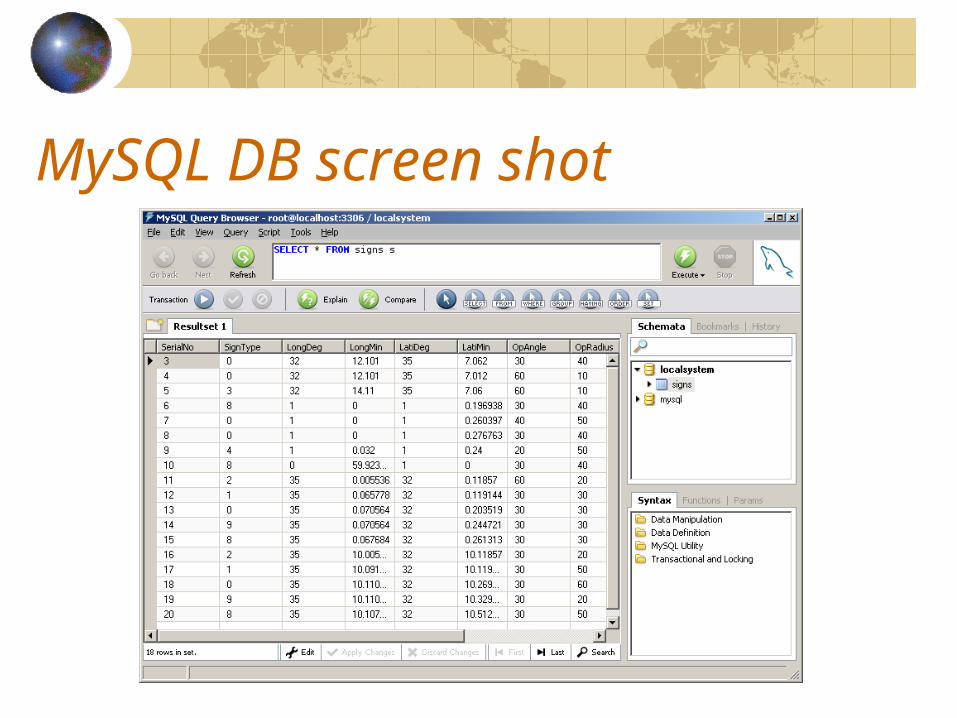
MySQL DB screen shot

Class: GPS
The GPS class handles two tasks:
Retrieve GPS data samples (velocity, location, direction).
Manipulate the retrieved data, such as calculating absolute distance or speed and several location vector calculations.

Class: Controller
The controller processes input data from the database and the GPS.
Utilize it to recognize compromising situations.
If the controller decides such situation exists, it sends appropriate alerts to the user.

The “Magic” behind the decision…The Controller has to identify a compromising situation based on the car’s location and speed and a set of signs stored in the database.
All the sign’s are extracted from the database.
Sign’s area of operation is check to see if it holds the current car’s location.
This decision is made by a special function called “isInRange”.
“isInRange” gets the sign’s parameters (direction and opening angle) and checks if the car is in the sign’s view range.
(see next slide for illustration)

Is In Range? …

The “Magic”… (cont.)Once we found that the car is in the sign’s range of operation, “isSafe” method is executed, to check if the sign’s profile is met.
If the car violates the sign’s profile a proper alert is invoked.
The “isSafe” method is a member of the sign class, and will be reviewed in the following slides.
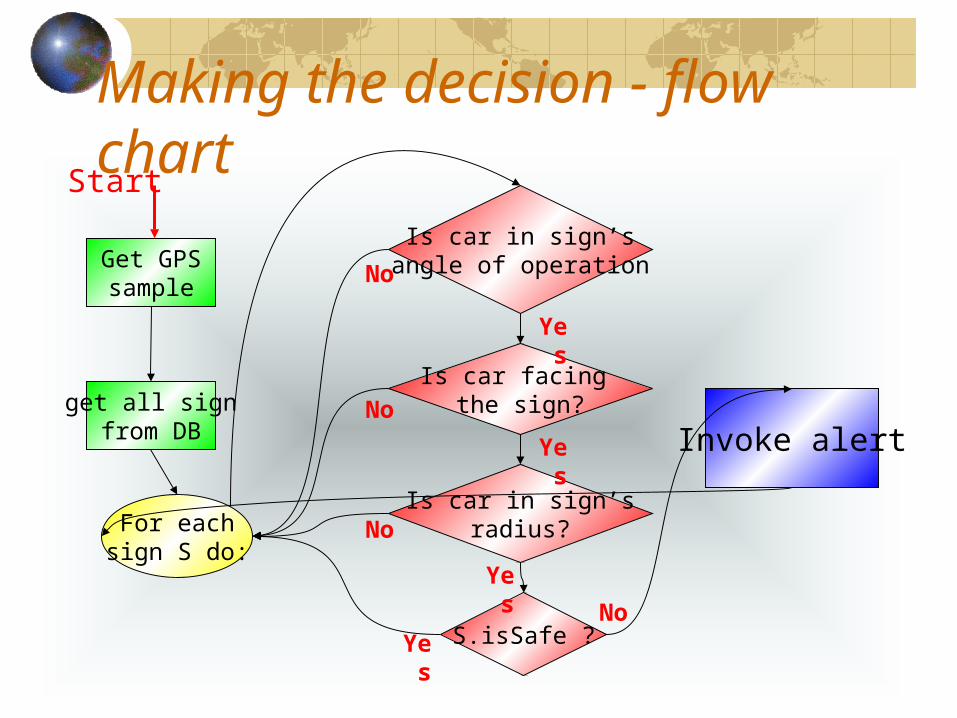
Making the decision - flow chart
Get GPSsample
get all signfrom DB
For eachsign S do:
Is car in sign’sangle of operation
Is car facing the sign?
Is car in sign’sradius?
S.isSafe ?
Invoke alert
Start
No
No
No
No
Yes
Yes
Yes
Yes

Class: SignsSigns is in fact a container which holds all the signs familiarized by the system, such as stop sign, slow sign, etc…
Each sign is an object for itself.
All the signs inherits from a super object while using the polymorphism mechanism.
The Sign ObjectEach Sign must implement a certain function called “isSafe”.
The “isSafe” method is a virtual method which each sign implements differently, according to it’s profile.
“isSafe” checks whether our current car’s statuscomplies with the profile.
(example in next slide…)

Example : “Stop Sign” ProfileStop Sign Profile
0
5
10
15
20
25
Distance
Distance (meters)
Velo
cit
y
( mete
r
/ sec
)
Velocity
100m 50m
This profile is based on Galileo's equation:
:
220
where
xavvelocity
x denotes distance and v0 denotes speed at distance of 0 meters

Class: Graphical User InterfaceThe user interface was implemented using MFC concepts.
The interface displays the warning messages to the user.
It also displays additional information for better understanding of the running simulation, such as:
The current GPS sample data.a radar-like view of the surrounding signs. (100 meter radius)a view of the closest sign.
(screen shot available in next slide)

GUI screen shot

Next semester goals:Review and development of the local database exchange algorithm.
Optimization of the controller and the identification algorithm.
Add scripting abilities for the GPS simulator.
To interface with a GPS.
Conduct a Real-time testing of the system.

31/10/2004