Fault Tolerant Reconfigurable Satellite Formations Using Adaptive Variable Structure Techniques
16
Fault Tolerant Reconfigurable Satellite Formations Using Adaptive Variable Structure Techniques Godard ∗ and K. D. Kumar † Ryerson University, Toronto, Ontario M5B 2K3, Canada DOI: 10.2514/1.38580 This paper proposes two adaptive nonlinear control algorithms based on a variable-structure control design for multiple spacecraft formation flying. The nonlinear dynamics describing the motion of the follower spacecraft relative to the leader spacecraft are considered for the case in which the leader spacecraft is in an elliptical reference orbit, and the stability of such a formation in the presence of external perturbations is investigated. This paper presents fault-tolerant control schemes to account for accidental or degradation faults in spacecraft sensors and thrusters. The nonlinear analytical model describing the system is used to develop two adaptive fault-tolerant control laws (continuous sliding mode control and nonsingular terminal sliding mode control) that guarantee global asymptotic convergence of the position tracking error in the presence of unknown follower spacecraft mass and external disturbances. Several numerical examples are presented to demonstrate the efficacy of the proposed controllers to maintain the relative motion by correcting for initial offsets and external perturbation effects that tend to disperse the formation. Simulation results confirm that the suggested methodologies yield submillimeter formation, keeping precision and effectiveness in ensuring formation maneuvering. In addition, an abrupt blockage of the relative position sensors, thruster failure for a period of time, and thruster degradation (amidst formation keeping and reconfiguration maneuvers) are simulated to demonstrate the fault recovery capability of the controllers. The numerical results clearly establish the robustness of the proposed reconfigurable adaptive control scheme for precise formation keeping in the event of sensor and thruster faults. Nomenclature a = semimajor axis of the reference orbit, km e = eccentricity of the reference orbit e x = relative radial position tracking error, km e y = relative along-track position tracking error, km e z = relative cross-track position tracking error, km i k = orbit inclination, degrees (k c, f) m F = mass of the follower spacecraft, kg r c = radial position of the leader spacecraft from the Earth center, km r dc = nominal radius of the desired circular formation, km r dpc = nominal radius of the desired projected circular formation, km r F = radial position of the follower spacecraft from the Earth center, km X = state vector X d = desired state vector Subscripts L = leader spacecraft F = follower spacecraft I. Introduction S PACECRAFT formation flying (SFF) has been identified as an enabling technology for many future space missions [1–4]. NASA, the U.S. Air Force, and the ESA have shown keen interest in developing reliable autonomous formation keeping strategies to deploy multiple spacecraft for various space missions (e.g., Earth Observing-1 [5], TechSat21 [6,7], Terrestrial Planet Finder [8,9], Orion [10], Prisma [11], Darwin [12,13], and XEUS (x-ray evolving universe spectroscopy) [13,14]). The functionality of a single complex spacecraft can be distributed between a cluster of smaller, closely flying spacecraft. This approach is expected to have several advantages, including the ability to enhance and/or enable missions through increased resolution of scientific observations, improve flexibility and redundancy, be real-time reconfigurable, adapt to highly dynamic demands, and lower life cycle costs [15]. However, its development poses tremendous challenges, ranging from spacecraft formation initialization to reconfiguration, coordination, and formation trajectory generation. The main challenge is to control the relative positions of spacecraft in formation when the external disturbances from gravitational perturbation, atmospheric drag, solar radiation pressure, electromagnetic forces, and Earth oblateness (the most prominent influence of this is called the J 2 effect) cause drifts of both the relative positions of the spacecraft and the formation center. For autonomous coordinated control of multiple SFF, robust performance and fault tolerance of the controllers are key issues that need to be addressed. Thruster faults can cause severe performance deterioration and system instability, leading to catastrophic accid- ents. If the follower spacecraft is not equipped with a fault-tolerant control algorithm, an abrupt occurrence of an actuator or a sensor fault can decrease the effectiveness of the controller for formation keeping, resulting in the loss of one or more spacecraft. With a view to tackle these challenges, this paper focusses on developing control schemes that can achieve the formation objectives, even in the pres- ence of actuator and/or sensor faults, uncertainties, and disturbances. The design of practical control methodologies for SFF relies heavily on the dynamics of the relative motion of satellites within a cluster. Several investigations [16–19] considered linearized relative motion equations in a Cartesian coordinate frame, called the Hill’ s equations [16] or the Clohessy–Wiltshire (CW) equations [17]. Satellite formation initialization is an important step in achieving a desired formation. Several researchers have investigated the initializ- ation procedure for formation with eccentric reference orbits [20] and initial conditions accommodating corrections due to nonlinearity as Received 15 May 2008; revision received 19 June 2009; accepted for publication 29 December 2009. Copyright © 2010 by Godard and Krishna Dev Kumar. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission. Copies of this paper may be made for personal or internal use, on condition that the copier pay the $10.00 per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923; include the code 0731-5090/10 and $10.00 in correspondence with the CCC. ∗ Doctoral Candidate, Department of Aerospace Engineering, 350 Victoria Street; [email protected]. † Associate Professor and Canada Research Chair in Space Systems, Depart- ment of Aerospace Engineering, 350 Victoria Street; krishnadevkumar@ yahoo.com. JOURNAL OF GUIDANCE,CONTROL, AND DYNAMICS Vol. 33, No. 3, May–June 2010 969 Downloaded by UNIVERSITE LAVAL on July 6, 2014 | http://arc.aiaa.org | DOI: 10.2514/1.38580
Transcript of Fault Tolerant Reconfigurable Satellite Formations Using Adaptive Variable Structure Techniques

Fault Tolerant Reconfigurable Satellite Formations UsingAdaptive Variable Structure Techniques
Godard∗ and K. D. Kumar†
Ryerson University, Toronto, Ontario M5B 2K3, Canada
DOI: 10.2514/1.38580
This paper proposes two adaptive nonlinear control algorithms based on a variable-structure control design for
multiple spacecraft formation flying. The nonlinear dynamics describing the motion of the follower spacecraft
relative to the leader spacecraft are considered for the case in which the leader spacecraft is in an elliptical reference
orbit, and the stability of such a formation in the presence of external perturbations is investigated. This paper
presents fault-tolerant control schemes to account for accidental or degradation faults in spacecraft sensors and
thrusters. The nonlinear analyticalmodel describing the system is used to develop two adaptive fault-tolerant control
laws (continuous sliding mode control and nonsingular terminal sliding mode control) that guarantee global
asymptotic convergence of the position tracking error in the presence of unknown follower spacecraft mass and
external disturbances. Several numerical examples are presented to demonstrate the efficacy of the proposed
controllers tomaintain the relativemotion by correcting for initial offsets and external perturbation effects that tend
to disperse the formation. Simulation results confirm that the suggested methodologies yield submillimeter
formation, keeping precision and effectiveness in ensuring formation maneuvering. In addition, an abrupt blockage
of the relative position sensors, thruster failure for a period of time, and thruster degradation (amidst formation
keeping and reconfiguration maneuvers) are simulated to demonstrate the fault recovery capability of the
controllers. The numerical results clearly establish the robustness of the proposed reconfigurable adaptive control
scheme for precise formation keeping in the event of sensor and thruster faults.
Nomenclature
a = semimajor axis of the reference orbit, kme = eccentricity of the reference orbitex = relative radial position tracking error, kmey = relative along-track position tracking error, kmez = relative cross-track position tracking error, kmik = orbit inclination, degrees (k� c, f)mF = mass of the follower spacecraft, kgrc = radial position of the leader spacecraft from the Earth
center, kmrdc = nominal radius of the desired circular formation, kmrdpc = nominal radius of the desired projected circular
formation, kmrF = radial position of the follower spacecraft from the Earth
center, kmX = state vectorXd = desired state vector
Subscripts
L = leader spacecraftF = follower spacecraft
I. Introduction
S PACECRAFT formation flying (SFF) has been identified as anenabling technology for many future space missions [1–4].
NASA, the U.S. Air Force, and the ESA have shown keen interest indeveloping reliable autonomous formation keeping strategies todeploy multiple spacecraft for various space missions (e.g., EarthObserving-1 [5], TechSat21 [6,7], Terrestrial Planet Finder [8,9],Orion [10], Prisma [11], Darwin [12,13], and XEUS (x-ray evolvinguniverse spectroscopy) [13,14]). The functionality of a singlecomplex spacecraft can be distributed between a cluster of smaller,closely flying spacecraft. This approach is expected to have severaladvantages, including the ability to enhance and/or enable missionsthrough increased resolution of scientific observations, improveflexibility and redundancy, be real-time reconfigurable, adapt tohighly dynamic demands, and lower life cycle costs [15]. However,its development poses tremendous challenges, ranging fromspacecraft formation initialization to reconfiguration, coordination,and formation trajectory generation. Themain challenge is to controlthe relative positions of spacecraft in formation when the externaldisturbances from gravitational perturbation, atmospheric drag, solarradiation pressure, electromagnetic forces, and Earth oblateness (themost prominent influence of this is called the J2 effect) cause drifts ofboth the relative positions of the spacecraft and the formation center.For autonomous coordinated control of multiple SFF, robustperformance and fault tolerance of the controllers are key issues thatneed to be addressed. Thruster faults can cause severe performancedeterioration and system instability, leading to catastrophic accid-ents. If the follower spacecraft is not equipped with a fault-tolerantcontrol algorithm, an abrupt occurrence of an actuator or a sensorfault can decrease the effectiveness of the controller for formationkeeping, resulting in the loss of one or more spacecraft. With a viewto tackle these challenges, this paper focusses on developing controlschemes that can achieve the formation objectives, even in the pres-ence of actuator and/or sensor faults, uncertainties, and disturbances.
The design of practical control methodologies for SFF reliesheavily on the dynamics of the relative motion of satellites within acluster. Several investigations [16–19] considered linearized relativemotion equations in a Cartesian coordinate frame, called the Hill’sequations [16] or the Clohessy–Wiltshire (CW) equations [17].Satellite formation initialization is an important step in achieving adesired formation. Several researchers have investigated the initializ-ation procedure for formationwith eccentric reference orbits [20] andinitial conditions accommodating corrections due to nonlinearity as
Received 15 May 2008; revision received 19 June 2009; accepted forpublication 29 December 2009. Copyright © 2010 by Godard and KrishnaDev Kumar. Published by the American Institute of Aeronautics andAstronautics, Inc., with permission. Copies of this paper may be made forpersonal or internal use, on condition that the copier pay the $10.00 per-copyfee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers,MA 01923; include the code 0731-5090/10 and $10.00 in correspondencewith the CCC.
∗Doctoral Candidate, Department of Aerospace Engineering, 350 VictoriaStreet; [email protected].
†AssociateProfessorandCanadaResearchChair inSpaceSystems,Depart-ment of Aerospace Engineering, 350 Victoria Street; [email protected].
JOURNAL OF GUIDANCE, CONTROL, AND DYNAMICS
Vol. 33, No. 3, May–June 2010
969
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

well as eccentricity [21]. Gurfil [22] derived global conditions forboundedmotion to accommodate nonlinearity and eccentricity usingenergy matching conditions. In [23], a method to design a desiredformation for SFF (considering nonlinearity and eccentricity) waspresented, which employed generalized periodic relative motion tocorrect for the initial conditions derived from Hill’s equations [23].Gim and Alfriend [24] developed a state transition matrix, using ageometric method for the relative motion that included the effectscaused by the reference orbit eccentricity and differential gravita-tional perturbations. A state transition matrix that describes therelative motion for arbitrary elliptical orbits was also developed in[25]. Because the CWequation is a linear approximation of the realsystem, the influence of the eccentric reference orbit, nonlineardifferential gravity, aspherical Earth, and higher-order terms due toother perturbations are neglected. For low-Earth orbit (LEO), themost significant disturbance arises from the effect of J2, due tononhomogeneity and oblateness of the Earth [26], which drifts theperigee and changes the nodal precision rate, causing the orbitalplanes to precess slowly in space. Schaub and Alfriend [27]developed J2 invariant relative orbits for formation flying, usingdifferences in mean orbit elements. Coupled linearized differentialequations, with constant coefficients capturing the effects of J2potential, were presented by Schweighart and Sedwick [28].Richardson and Mitchell [29] developed third-order analyticalsolutions to describe nonlinear periodic motions in Hill’s frame.Therefore, from the preceding discussion, it is clear that formationcontrol designs based on CW equations are unlikely to yieldgood precision for SFF in elliptical orbits under the influence ofperturbations.
The current SFF literature largely focusses on developingnonlinear control algorithms to deal with system nonlinearities, forwhich traditional linear control theory is not directly applicable.Recently, a robust control scheme for two spacecraft in formation,subjected to time-variant external disturbances, was developed [30].The robustness of the controller to system disturbances and theclosed-loop system stability was analyzed, based on robust nonlinearcontrol theory. The characteristics of linear and nonlinear controlmethodologies for SFF were studied in [31], based on a fuel con-sumption perspective. A sliding mode control (SMC) law withdiscrete thrusting and a linear quadratic regulator (LQR) controller,which uses continuous thrusts for formation maintenance, werecompared [31]. The LQR controller, using linear CWequations, wasfound to be a better option for short duration missions with a smallformation size and circular leader orbits. For a larger formation sizeand a leader in eccentric orbits, adopting to a nonlinear controllerbased on nonlinear relative dynamics was required, as shown in [31].A � robust controller based on a linear model with parametricuncertainties due to eccentricity and semimajor axis variations wasdeveloped in [32], and the controller was found to be fuel efficientwhen compared with a LQR and a SMC. Perturbations, such as J2effects and atmospheric drag, were regarded as bounded functionaluncertainties, and noise due to actuation and sensor systems wasincluded in the controller designs [32]. Vignal and Pernicka [33]considered a controller based on a nonlinear state-feedback-lineariz-ation technique and a LQR controller for a case in which only verylimited on–off thrusting capability was available onboard thespacecraft. The linear controller was found to be best suited withregard to fuel consumption for cases in which uncertainties areknown to be within prescribed limits. For SFF systems with largemeasurement noise and growing uncertainties, formation keepingobjectives were found to be better achieved with the nonlinearcontroller. Vaddi and Vadali [34] developed a Lyapunov stabilizedcontroller, an LQR controller, and a period matching controller tostabilize large formations. The control costs associated with theLyapunov controller were found to be very high, whereas the periodmatching controller yields zero steady-state controls. The state-dependant Riccati equation (SDRE) control method has also beenused to solve the formation flying control problem. Won and Ahn[35] derived nonlinear orbital dynamics of relative motion equationsfor a constant distance separation formation flying problem and usedSDRE to control the formation. Similarly, Stansbery and Cloutier
[36] also developed a controller using SDRE for simultaneoustranslational and rotational control of spacecraft formations. Yanet al. [37] designed Lyapunov-based nonlinear output feedbackcontrollers for Keplerian relative orbital dynamics, which guaranteesglobal uniform ultimate boundedness of the position and the velocitytracking errors. Explicit feedback control laws for a fleet of micro-spacecraft moving in formation were derived, based on nearest-neighbor tracking for formation keeping and relative attitudealignment, by Wang and Hadaegh [38].
SMC is a robust nonlinear feedback control methodology thatbelongs to a kind of variable-structure control (VSC) system, inwhich the structure between the switching surfaces is changed toachieve desired performance. Some of the advantages are rapidresponse, insensitive to parameter variations and external disturb-ances, and low computational costs. Yeh et al. [39] designed an on–off control law, using SMC to control a desired satellite formation.Additional studies were also presented that provided insight into theselection of optimal design parameters, such as the equivalentdamping ratio and bandwidth.Modified Hill’s equations consideringJ2 perturbations were used for the design of the SMC, by Lim et al.[40], to control the formation. An extendedKalmanfilter was appliedto estimate the state vector based on relative distance and velocitymeasurements, and dead zone was used to avoid the chatteringphenomenon. Continuous SMC for formation control was developedby Massey and Shtessel [41], including a higher-order sliding mode(HOSM), a SMC driven by a sliding mode disturbance observer, andcontinuous SMC using integral sliding surfaces. Simulation analysisshowed that continuous SMC/HOSM methods were effective inreducing the tracking errors of the follower spacecraft in the presenceof a bounded disturbance functionwhile keeping fuel consumption ata low level. Wang and Zhang [42] derived normalized linearequations of satellite relativemotion, including J2 perturbation, and acontroller based on SMC was designed for a discrete time formationsystem. Parameter uncertainty and J2 perturbations were included inthe control design. However, the previouslymentioned SMCdesignsare all based on the linearized dynamics of SFF. Therefore, thecontrollers are limited to uncertainty limitations and precise initialconditions. A coordinated SMC control scheme, to achieveformation maneuvers while keeping the internal formation intact,based on nonlinear dynamics was developed by Liu et al. [43]. Thedisturbances were assumed to be bounded by some known positiveconstants, and the method requires greater communication betweenthe leader and the follower, because the control scheme isimplemented by allowing followers to frequently use the informationof the leader’s control inputs.
Adaptive control has also been used to develop follower formationtracking control laws. Hadaegh et al. [44] developed an adaptiveposition tracking controller that compensates for unknown, constantdisturbances for coordination and control of a fleet of microspace-craft moving in formation. Wang et al. [45] designed two robustadaptive control schemes for formation keeping of a pair of satellitesfor which the disturbance was assumed bounded by a knownnonlinear function scaled by an unknown constant. In [46], a globallyconvergent, full-state feedback adaptive controller is developed forSFF, assuming that the spacecraft masses and disturbances areunknown but constant. The adaptive controller uses six-dimensionaladaptive gains, necessitating greater communication between theleader and follower. Yan et al. [47] formulated the controller in [46]for the case in which the leader is in an unperturbed elliptical orbit.Unknown periodic disturbances with known upper bounds enteringthe system model were accounted for in the adaptive learningcontroller developed by Wong et al. [48]. A locally convergentadaptive output feedback controller without velocity measurementsfor constant disturbances was also developed by Wong et al. [49],using the full nonlinear dynamics of the SFF system. Recently,Pongvthithum et al. [50] developed a new universal adaptive controlscheme for SFF, using a monotone adaptive gain, which requires nocommunication between the leader and the follower satellites.
Although various nonlinear and adaptive control schemes havebeen used for SFF systems, none of the previously discussed litera-ture accounts for unexpected actuator and/or sensor faults. Formation
970 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

control of multiple spacecraft by introducing formation feedbackfrom the spacecraft to the virtual structure with control inputsaturationwas illustrated byRen andBeard [51], considering variouscases in which the actuators fail for a short period of time. Anadaptive backstepping control scheme that compensates for magni-tude error and misalignment of the thruster to solve the relativeposition tracking problem of SFF was developed by Lim and Bang[52]. Some of the potential problems that can occur due to controlinput saturation, actuator faults, and sensor faults include:
1) Actuator and sensor faults induce degradation in the formation-keeping performance of the control loop, and, sometimes, a largetracking error can lead to the loss of one or more spacecraft.
2)With control input saturation, the integral of the relative positionor velocity error accumulates over time (also called integratorwindup [53]), which can prevent the control input from unsaturating,leading to performance degradation and instability.
3) Most of the faults discussed previously, and other short-termactuator failures, introduce constant or state-dependant disturbancesinto the overall closed-loop system, causing the SFF dynamics todeviate largely from their nominal regime. Therefore, fault-tolerantor reconfigurable control strategies are necessary to maintainformation stability and robustness.
With a view to overcome these limitations, this paper investigatesthe feasibility of achieving a desired formation in the presence ofactuator and sensor faults, using adaptive nonlinear control tech-niques implemented via VSC. The main contributions of this study,relative to other works, are as follows:
1) A fault-tolerant adaptive SMC (ASMC) scheme is proposed,based on a leader–follower approach, for precise formation keepingin the presence of unknown spacecraft masses, external pertur-bations, and position offsets after the initial deployment that tend todisperse the formation. In comparison with the aforementionedstudies associatedwith nonlinear control laws for formation keeping,this study considers different types of failures of thrusters, includingthruster degradation [loss of effectiveness (LOE)], thruster stuckfault [lock in place (LIP)] at some unknown position (that do notrespond to subsequent commands), thruster failure for a short periodof time (stuck closed), and sensor LIP failure.
2) Compared with linear hyperplane-based sliding modes, theterminal slidingmode (TSM)with nonlinear hypersurfaces can drivethe sliding variables to reach the sliding mode surface at a faster ratewith superior finite error convergence. To implement formationmaneuvers without destroying the desired geometry, high precisionformation maintenance and formation speed are required for totalsystem robustness. Therefore, we develop a fault-tolerant adaptivecontrol law based on the nonsingular TSM (NTSM), which isparticularly useful for high precision control, as it speeds up the rateof convergence near an equilibrium point [54].
3) The proposed control methodologies have the capability tocompensate for time-varying external disturbances, uncertain sys-tem parameters, and control input saturation. Formation controlobjectives can be achievedwith limited control authority. In addition,the proposed techniques can also be used to precisely control theformation for cases in which the leader is in an eccentric referenceorbit.
The paper is organized as follows. Section II introduces thecomplete nonlinear mathematical model of the SFF system. ASMCand NTSM control laws are formulated with detailed proof ofstability for the closed-loop system in Sec. III. For a detailedassessment of the system performance under the proposed controlstrategies, the results of computer simulations incorporating differentfault scenarios are presented in Sec. IV. In Sec. V, we conclude thepaper with some discussions on future work.
II. Spacecraft Formation Flying Model and SystemEquations of Motion
The investigation is initiated by formulating the complete non-linear equations of motion of the SFF system to develop a mathe-matical model that facilitates the design of adaptive nonlinear controlmethodologies. The proposed system comprises a leader spacecraft
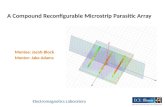
in an elliptical planar trajectory, with the Earth’s center at one of itsfoci and a follower spacecraft moving in a desired relative trajectoryabout the leader spacecraft (Fig. 1). The orbital motion of the leaderspacecraft is defined by a radial distance rc from the center of theEarth and a true anomaly �. The inertial coordinate systemO–XYZ is
attached to the center of the Earth, and rc 2 R3, rc ≜ � rc 0 0 �T ,defines the position vector of the leader satellite with respect to theinertial coordinate frame. The relative motion coordinates of thefollower spacecraft are described relative to the leader spacecraft,using the local-vertical–local-horizontal (LVLH) frame S–xyz fixedat the center of the leader spacecraft, with the x axis pointing in theradial direction (along rc), the z axis taken along normal to the orbitalplane, and the y axis representing the third axis of the right-handedS–XYZ frame. The relative position of the follower spacecraft fromthe origin of the leader spacecraft coordinate frame is defined by
� 2 R3, �≜ � x y z �T .In this study, the satellites are modeled as point masses; therefore,
the rotational dynamics of the leader and the follower spacecraft arenot taken into account. The orbital equations of motion for the leaderspacecraft and the full nonlinear translational dynamics of thefollower spacecraft relative to the leader spacecraft, taking intoaccount the thrust and disturbance forces, can be written in thefollowing form [21]:
�r c � rc _�2 ��
r2c� 0 (1)
rc ��� 2 _� _rc � 0 (2)
mF �x � 2mF_� _y�mF� _�2x� ��y� �mF�
�rc � xr3F� 1
r2c
�� uFx � Fdx (3)
mF �y� 2mF_� _x�mF� ��x � _�
2y� �mF
�
r3Fy� uFy � Fdy (4)
mF �z�mF
�
r3Fz� uFz � Fdz (5)
where rF � ��rc � x�2 � y2 � z2�1=2, x, y, and z indicate,respectively, the radial, along-track, and out-of-plane componentsof the position vector of the follower spacecraft with respect to theleader spacecraft in the LVLH coordinate system, and � refers to thetrue argument of latitude (sum of the argument of periapsis and trueanomaly) [55]. Fdj is the net disturbance force on the follower, anduFj are the components of the follower control input vector. Thedisturbances in Eqs. (3–5) are time-varying disturbances attributed togravitational perturbation, solar radiation pressure, and third-bodyperturbations. These gravity perturbations can deviate an uncon-trolled spacecraft from its nominal orbit. In LEO, Earth oblateness is,by far, the most dominant perturbation.
Remark 1: In this study,wemake the following assumptions: 1) theleader spacecraft remains in an unperturbed elliptical reference orbit,described by Eqs. (1) and (2), 2) the relative disturbance forcesaccounted for in this study are to the order of 10�4 N, which is higher
Z
ρ
rInertialReferenceFrame
O
x
y
z
S
θ
Follower Satellite
Reference Line
Leader Satellite
Earth
rc
X
Y
Fig. 1 Geometry of orbit motion of leader and follower spacecraft.
GODARD AND KUMAR 971
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

than what is usually considered by most researchers, and 3) the massof the follower spacecraft and the relative disturbance forces areassumed to be unknown.
In the present investigation, the desired or commanded states�xd; _xd; yd; _yd; zd; _zd� are taken as the solution of the linearizedform of the relative equations of motion(3–5), when Fdj � 0, j� x,y, z. Two different types of desired trajectories are considered:
1) In circular formation, the leader and the follower spacecraftmaintain a constant separation from each other, and the formation ismathematically defined as x2 � y2 � z2 � r2dc. The equations of thedesired circular trajectory are given as follows:
(xdydzd
)� rdc
2
sin�nt� ��2 cos�nt� �����3p
sin�nt� ��
24
35 (6)
2) In the projected circular formation, the leader and the followerspacecraft maintain a fixed relative distance only on the y–z plane,and the formation is mathematically defined as y2 � z2 � r2dpc. Thischaracteristic has applications for ground observing missions(synthetic aperture radar) [19]. The corresponding projected circularformation trajectory equations are given as follows:
(xdydzd
)�rdpc2
sin�nt� ��2 cos�nt� ��2 sin�nt� ��
24
35 (7)
where rdc and rdpc are the circular and projected circular formationsizes, respectively, � is the in-plane phase angle between the leaderand the follower spacecraft (the initial phase angle is defined, at thetime of the equator crossing of the leader spacecraft, in the localhorizon y–z plane), and n is the mean angular velocity and equals to��������������e=a
3c
p(�e is the gravitational parameter of the Earth and ac is the
semimajor axis of the leader spacecraft) [56]. In this paper, we onlydeal with these two formation types, although the control algorithmsdeveloped are applicable to any formation types and spacecraftconfigurations. Finally, the control objective is to compute the thrustuF required to drive the follower spacecraft to a desired formationtrajectory [Eqs. (6) and (7)]with respect to the leader spacecraft in thepresence external disturbances and the initial deployment errors thatcan gradually disperse the formation if it is left uncontrolled.
III. Design of Control Laws
In this section, we present the theoretical basis for developingadaptive nonlinear control algorithms for the SFF mathematicalmodel. First, the methods and analysis tools of the VSC, which isrobust to nonlinear model errors, are developed. The formulation ofthe nominal VSC algorithm is then improved using adaptiveapproximation in the presence of nonlinear model uncertainties. Themain idea behind theVSC approach is to design a high-speed controlalgorithm that can drive the state trajectory of the nonlinear systemonto a sliding or switching surface and maintain the system’s statetrajectory on the sliding surface. The property of remaining on theswitching surface once intercepted is called a sliding mode, in whichthe behavior of the system is dominated by the lower-order dynamicsand is inherently insensitive to plant uncertainties and externaldisturbances. As discussed earlier, external perturbations can deviatean uncontrolled spacecraft from its nominal orbit, thereby dispersingthe desired formation. Similarly, the formation spacecraft may not beplaced in its desired orbit, initially causing an offset in the relativeposition. These factors can increase the magnitude of the reachingphase to the slidingmode from the SFF control system’s perspective.As the magnitude of the reaching phase grows larger, the effect ofboth the external disturbances and the internal parameter uncer-tainties also increases. Therefore, compared with linear hyperplane-based slidingmodes, the TSMbased on nonlinear switching surfacesoffers superior properties, such as fast, finite time convergence [54],making it particularly useful for high-precision SFF control.
Based on the leader–follower SFF mathematical model presentedin the previous section, we define the relative state vector and the
desired relative trajectory as X�t� and Xd�t� 2 R6, respectively. Theperformance measure is defined as the tracking error e�t� 2 R6:
e�t�≜ X�t� � Xd�t� (8)
To simplify the control design procedure, we reformulate the relativetranslational dynamics of the SFF model in a state-dependantparameterized form [Eqs. (3–5)] as follows:
_x
�x
_y
�y
_z
�z
266666666664
377777777775�
0 1 0 0 0 0
_�2 � �
r3F
0 �� 2 _� 0 0
0 0 0 1 0 0
� �� �2 _� _�2 � �
r3F
0 0 0
0 0 0 0 0 1
0 0 0 0 � �
r3F
0
2666666666664
3777777777775
x
_x
y
_y
z
_z
266666666664
377777777775
�
0
�
r2c� �rc
r3F
0
0
0
0
266666666664
377777777775� 1
mF
0 0 0
1 0 0
0 0 0
0 1 0
0 0 0
0 0 1
266666666664
377777777775
8>><>>:
uFx
uFy
uFz
264
375�
Fdx
Fdy
Fdz
264
3759>>=>>; (9)
or
_X� A�t; X�X� E�t; X� � 1
mF
B�UF � Fd�t�� (10)
where X 2 Rn is the state vector, A�t; X� 2 Rn�n, B 2 Rn�m, andUF 2 Rm � �uFx; uFy; ufz�T is the vector of control inputs for n� 6and m� 3. To minimize fuel consumption, the total control input isassumed to be subjected to a saturation limit defined by
uFj �
8<:N if uFj > NuFj if � N < uFj < N�N if uFj <�N
j� x; y; z (11)
Fd�t� � �Fdx; Fdy; Fdz�T is the vector of external disturbances withan unknownbound.Although the plant dynamics defined byEqs. (3–5) consider external time-varying perturbations on the followerspacecraft (relative forces), for controller synthesis, we assume thatthe perturbation is unknown. The upper bounds of the disturbanceson x, y, and z are not considered to be the same and we define
Fd�t� 2 Sf � fFd: jFdjj gj ! Gg (12)
where G� �gx; gy; gz�T . The property that UF > G holds to ensurethat the control available from
Uf 2 Su � fuFj: � N ⩽ uFj ⩽ N; j� x; y; zg
is sufficient to reject any disturbance from Sf [53].Remark 2: As discussed earlier, the follower spacecraft massmF is
assumed to be unknown, and the external perturbations are timevarying and periodic with an unknown bound G. These unknownvariations are estimated online by the adaptation laws that providethe estimated parameters to the controller. The parameter estimationerrors are given by
~mF�t� �mF � mF�t�; ~G�t� �G � G�t� (13)
where mf�t� 2 R denotes the estimate of the follower spacecraft
mass mF, and G�t� 2 R3 denotes the estimate of the externaldisturbance bound G. For the closed-loop system, the estimatedparameters do not converge to their true values and, therefore, theparameter update laws are only introduced for robustness purposes.
972 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

Remark 3: The controller is derived for circular orbits and,therefore, we do not consider any parameters associated with theelliptic orbit of the leader. For deriving the control laws, wemake thefollowing modifications to Eq. (9), assuming the leader spacecraft in
the circular reference orbits: 1) ��� 0, 2) _�� _�k ���������������e=r
3p
q, where
rp is the radius of the orbit, assuming the leader is in a circular orbit,and 3) rc is replaced with rp.
Our objective is to develop a control algorithm for the SFFmathematical model, Eqs. (3–5), such that uFj, j� x, y, z, belongingto Su, drives the relative states of the system to its desired relativetrajectories as t!1, so that the tracking errors, Eq. (8), converge tozero:
limt!1
X�t� � Xd�t� (14)
The desired trajectories for formation keeping, considered in thisstudy, are 1) circular formation [Eq. (6)] with formation size rdc, and2) projected circular formation [Eq. (7)] with formation size rdpc. Toimplement a formation maneuver from one type of formation toanother, we study a combination of both circular and projectedcircular formations with different formation sizes.
A. Adaptive Sliding Mode Control
In this section, we present the design procedure to implementASMC for SFF control. Adaptive control deals with situations inwhich some of the parameters are unknown or slowly time varying.The basic idea is to estimate these unknown parameters online andthen use the estimated ones in place of the unknown ones in thefeedback control law. The overall design can be divided into twomain steps. Step 1 involves the construction of a sliding surface,containing tracking errors to ensure that, once the system is restrictedto the sliding surface, the follower spacecraft can be expected to be inthe desired trajectory. Step 2 entails the derivation of parameteradaptation laws and feedback control gains that can drive the SFFrelative state trajectory to the sliding surface and maintain it in themanifold.
1. Sliding Manifold
The SMC design starts with building a sliding surface in thesystem state space. The motion of the system along the sliding modeis expected to meet the control requirements with desired robustnessto bounded disturbances and parametric uncertainties. For the SFFcontrol problem, we use the vector containing the trajectory trackingerrors, Eq. (8), to design a linear sliding surface S, given by
S� Ce�t� (15)
The sliding surfaceS is a (n–m) dimensionalmanifold,S 2 R�n�m��1,where C 2 Rm�n is a constant, strictly positive gain matrix, ande�t� 2 Rm�1 is the trajectory error vector:
e�t� � � x � xd _x � _xd y � yd _y � _yd z � zd _z� _zd �T
C�C1 1 0 0 0 0
0 0 C2 1 0 0
0 0 0 0 C3 1
264
375 (16)
whereCi is determined, such that when the system is in slidingmode(dominated by lower-order dynamics), the eigenvalues of the closed-loop system are stable.
2. Controller Design
The basic idea is to alter the system dynamics along the slidingsurface, such that the trajectory of the system is steered onto theslidingmanifold described byS� 0. Next,we derive the control lawsbased on Lyapounov’s secondmethod. After premultiplying Eq. (10)with mF, it can be restated as
mF_X�mFA�t�X�mFE�t� � B�UF � Fd�t�� (17)
where the A�t� matrix is slightly different from Eq. (9). To examinethe convergence properties of the trajectory errors, consider aLyapunov function candidate defined as follows:
V � 1
2STmFS�
1
2�1~m2F �
1
2~GTW�1 ~G (18)
where �1 is a positive constant, andW 2 R3�3 is a constant, diagonal,positive-definite, adaptation gain matrix. Taking the derivative of Valong its trajectory gives
_V � STmF_S � 1
�1~mF
_mF � ~GTW�1_G� STCmF _e �
1
�1~mF
_mF
� ~GTW�1_G� STC�mF
_X �mF_Xd� �
1
�1~mF
_mF � ~GTW�1_G (19)
Substituting for mF_X from Eq. (17), we get
_V � STC�mFA�t�X�mFE�t� � B�UF � Fd�t�� � mF_Xd�
� 1
�1~mF
_mF � ~GTW�1_G� STC�mFA�t�X �mFE�t�
� BUF �mF_Xd� � STCBFd�t� �
1
�1~mF
_mF � ~GTW�1_G (20)
As stated in the previous section in Eq. (12), the disturbances are
assumed to be bounded and, therefore, we can define f _V1: _V < _V1gfrom Eq. (20), given by
_V1 � STC�mFA�t�X �mFE�t� � BUF �mF_Xd�
� STCBjFd�t�j �1
�1~mF
_mF � ~GTW�1_G� STC�mFA�t�X
�mFE�t� � BUF �mF_Xd� � STCBG
� 1
�1~mF
_mF � ~GTW�1_G (21)
To replace the unknown follower spacecraft mass mF and theexternal disturbance bound G with its estimated values for the
control algorithm, we add and subtract mFA�t�X, mFE�t�, mF_Xd,
and STCBG and collect the common terms to reformulate _V1 inEq. (21) as
_V1 � STC�mFA�t�X � mFE�t� � BUF � BG � mF_Xd�
� ~mFSTC�A�t�X � E�t� � _Xd� � STCB ~G
� 1
�1~mF
_mF � ~GTW�1_G (22)
Based on Eq. (22), the control law is defined as
UF ���CB��1fmFC�A�t�X � E�t� � _Xd� � CBG� � sgn�S�g(23)
where � 2 R3�3 � diagf�x; �y; �zg for all f�i: �i > 0g, and
sgn �S� � �sgn�Sx�; sgn�Sy�; sgn�Sz��T
The adaptive laws for the mass of follower spacecraft and externaldisturbances are chosen as
_mF � �1STC�A�t�X� E�t� � _Xd�;_G�W�CB�TS (24)
3. Stability Analysis
In this subsection, we present the proof for the closed-loop systemstability to show that the adaptive control law defined by Eq. (23) andthe parameter and disturbance adaptation laws given by Eq. (24)guarantee global asymptotic stabilization of the relative states of thespacecraft to any desired formation. We first introduce Barbalat’s
GODARD AND KUMAR 973
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

lemma and then prove asymptotic convergence of the closed-looperror system.
Lemma 1: (Barbalat’s lemma [57,58].) If�: R! R is a uniformlycontinuous function for t 0, and if
limt!1
Zt
0
j����j d�
exists and is finite, then limt!1��t� � 0.Theorem 1: For the SFF mathematical model in Eq. (9), if the
sliding manifold is chosen as Eq. (15), the control law is defined asEq. (23), and the parameter and disturbance adaptation laws aredesigned as Eq. (24), then the system tracking error e�t� willconverge to zero in finite time.
Proof: Consider the SFF equations of motion in the parameterizedform, as shown in Eq. (17); multiplying the entire equation with BT ,we get the following open-loop dynamics using the bounds ofdisturbances:
mFBT _X�mFB
TA�t�X �mFBTE�t� �UF �G (25)
Based on the gain matrix for the sliding plane, chosen in Eq. (16),CB� I3�3. Substituting the ASMC law given by Eq. (23) in theopen-loop dynamics, we get
mFBT _X�mFB
TA�t�X �mFBTE�t� � fmFC�A�t�X
� E�t� � _Xd� � CBG� � sgn�S�g �G (26)
After rearranging and collecting the common terms, the followingclosed-loop error dynamics can be derived:
mF_S� ~mFC�A�t�X � E � _Xd� � ~G � � sgn�S� (27)
Now, consider the following Lyapunov function:
V1 �1
2STmFS�
1
2�1~m2F �
1
2~GTW�1 ~G (28)
Taking the first derivative along the trajectory of the system, we get
_V 1 � STmF_S � 1
�1~mF
_mF � ~GTW�1_G (29)
Substituting Eq. (27) in Eq. (29), we get
_V1 � ST � ~mFC�A�t�X� E � _Xd� � ~G � � sgn�S��
� 1
�1~mF
_mF � ~GTW�1_G� ST ��� sgn�S��
� ~mF
�STC�A�t�X � E�t� � _Xd� �
1
�1_mF
�
� ~GT �S �W�1 _G� (30)
The parameter update laws given by Eq. (24) can be substituted inEq. (30) to get
_V 1 � ST ��� sgn�S�� �X
�ijSij< 0 (31)
for i� x; y; z.Because _V1 is negative definite and, as stated before, _V < _V1, it is
proven that _V is also negative definite. Based on the inequality thatPjSij k S k and defining �min���> 0 as the minimum eigenvalue
of the positive-definite matrix �, we can show that
_V ��min��� k S k2 (32)
Defining j��t�j � �min��� k S k2 >0 and integrating both sides ofEq. (32) yields the following expression:
V�t� V�0� �Z 10
j����j d�) V�0� V�t�
�Z 10
j����j d� Z 10
j����j d� (33)
From Eq. (33), we obtain that S 2 L2. According to the proven
condition fromEq. (31), we have _V <1, fromwhichwe can deduce
the fact that _S 2 L1, henceS 2 L2 \ L1. Taking the limit as t!1on both sides of Eq. (33) gives
1> V�0� limt!1
Zt
0
j����j d� (34)
Now, using Barbalat’s lemma (see Lemma 1), we obtain
limt!1j����j � lim
t!1�min���kSk2 ! 0 (35)
which implies that S! 0 as t!1. Therefore, the adaptive controllaw described by Eqs. (23) and (24) ensures global asymptoticconvergence of the position and velocity tracking errors. □
B. Adaptive Nonsingular Terminal Sliding Mode Control
In this section, an adaptive nonsingular terminal SMC (ANTSMC)algorithm is designed for SFF. It is well known that the dynamicperformance of a slidingmode controller relies heavily on the chosensliding manifold or switching surface. We presented a conventionalsliding mode controller based on the linear sliding manifold in theprevious section. Nonlinear hyperplane-based sliding modes offer awide variety of design alternatives with fast and finite time converg-ence. A TSM control method using nonlinear sliding surfaces wasproposed and used to control rigid manipulators in [59]. The SMCschemes based on TSM were found to be very effective, butsingularity problems may occur if the initial conditions are notselected properly, resulting in an infinite control law [60]. Based onthe work presented by Feng et al. [54], we develop a NTSMcontroller for precise formation control. The control algorithm ismodified to adapt for uncertainties in the mass of the spacecraft andexternal disturbances.
1. Design of Sliding Manifold
The objective is to improve the transient performance of thesystem substantially by designing a nonlinear switching manifold.We reformulate the nonlinear SFF relative motion equations definedby Eq. (10) bymultiplyingwithBT , and the resulting equation can berepresented in the following dynamical form:
mF �q�mFM�q; _q� �UF � Fd�t�M�q; _q� � BT �A�t�X� E�t�� (36)
where q 2 R3 � �x; y; z�T is a vector of relative positions,M�q; _q� 2 R3 is a 3 � 1 vector containing the nonlinear terms ofgravitational effects and inertial forces, UF 2 R3 � �uFx; uFy; ufz�Tis the control input of the follower spacecraft, and Fd�t� ��Fdx; Fdy; Fdz�T is the time-varying external disturbance with anupper bound, as described in Eq. (12).
Suppose that qd 2 R3 is the vector of the desired relative positionsfor the follower spacecraft to be in circular formation or projectedcircular formation about the leader satellite [as described by Eqs. (6)and (7)], and let _qd 2 R3 be the derivative of qd. We now define��t� � q � qd and _��t� � _q � _qd, and thus the error vector used todevelop the NTSM control algorithm is as follows:
e�t� � ��T; _�T �T (37)
For the SFF system described by Eq. (36), we define the nonlinearsliding manifold as
S� �� C _�p=q (38)
974 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

where C 2 R3�3 is a constant, diagonal, positive-definite, controldesignmatrix. The positive odd integersp andq satisfy the followingcondition:
p > q (39)
Remark 4: It is important to note that one of the vectors hasfractional power in the nonlinear sliding surface, given by Eq. (38).For the vector _�, the fractional power is defined as
_� p=q � �� _x � _xd�p=q; � _y � _yd�p=q; �_z � _zd�p=q�T
2. Controller Design
The design of a suitable control algorithm is the second phase ofany VSC design procedure, as mentioned earlier. Our objective is toderive a control law that can drive the follower spacecraft to a desiredtrajectory and maintain it there. From the VSC design perspective,the control law will drive the plant trajectory to the nonlinearswitching surface, defined in Eq. (38), and maintain a sliding modecondition. In this section, we derive the control law based on theLyapunov stability theorem. The candidate Lyapunov function isdefined as follows:
V � 1
2STmFS�
1
2�1~m2F �
1
2~GTW�1 ~G (40)
where �1 is a positive constant, andW 2 R3�3 is a constant, diagonal,positive-definite, adaptation gain matrix. Taking the derivative of Valong its trajectory gives
_V � STmF_S � 1
�1~mF
_mF � ~GTW�1_G
� ST�mF _��
p
qC _�p=q�1mF ��
�� 1
�1~mF
_mF � ~GTW�1_G
� ST�mF _��
p
qC _�p=q�1fmF �q �mF �qdg
�
� 1
�1~mF
_mF � ~GTW�1_G (41)
Substituting for mF �q from Eq. (36), we get
_V � ST�mF _��
p
qC _�p=q�1fmFM�q; _q� �UF � Fd�t� �mF �qdg
�
� 1
�1~mF
_mF � ~GTW�1_G� ST
�mF _��
p
qC _�p=q�1fmFM�q; _q�
�UF �mF �qdg�� 1
�1~mF
_mF �p
qSTC _�p=q�1Fd�t� � ~GTW�1
_G
(42)
Because the disturbances are assumed to be bounded, we can define
f _V1: _V < _V1g, given by
_V1 � ST�mF _��
p
qC _�p=q�1fmFM�q; _q� �UF �mF �qdg
�
� 1
�1~mF
_mF �p
qSTC _�p=q�1G � ~GTW�1
_G (43)
Adding and subtracting, 1)
m F�_�� �p=q�CM�q; _q�_�p=q�1 � �qd�
and 2) �p=q�STC _�p=q�1G, we can replace the unknown terms in the
controller with the estimated parameters mF and G. The new form of_V1 is as follows:
_V1 � ST�mF _��
p
qC _�p=q�1fmFM�q; _q� �UF � G � mF �qdg
�
� ~mFST
�_�� p
qC _�p=q�1fM�q; _q� � �qdg
�
� 1
�1~mF
_mF �p
qSTC _�p=q�1 ~G � ~GTW�1
_G (44)
Based on Eq. (44), the control law is defined as
UF ��mF
�M�q; _q� � q
pC�1 _�2�p=q � �qd
�� G � � sgn�S� (45)
where � 2 R3�3 � diagf�x; �y; �zg for all f�i: �i > 0g, and
sgn �S� � �sgn�Sx�; sgn�Sy�; sgn�Sz��T
The adaptive laws for the mass of the follower spacecraft and theexternal disturbances are chosen as
_mF � �1ST�_�� p
qC _�p=q�1fM�q; _q� � �qdg
�_G� p
qW�C _�p=q�1�TS (46)
Remark 5: A 3 � 3 diagonal matrix of _�p=q�1 is of the form
_� p=�q�1 �� _x � _xd�p=�q�1 0 0
0 � _y � _yd�p=�q�1 00 0 �_z � _zd�p=�q�1
24
35(47)
Remark 6: Because p and q are positive odd integers, for thecontrol law given by Eq. (45) to be nonsingular, we need to addanother constraint, given by Eq. (48):
1<p
q< 2 (48)
3. Stability Analysis
In this section, we provide the proof for closed-loop systemstability to show that the adaptive NTSM control laws and theparameter adaptation laws, given by Eqs. (45) and (46), guaranteeglobal asymptotic stabilization of the relative states of the spacecraftin formation flying to any desired formation.
Theorem 2: For the SFF mathematical model in Eq. (36), if thecontrol law is defined as Eq. (45) and the parameter and disturbanceadaptation laws are designed as Eq. (46), then the system will reachthe nonlinearNTSMslidingmanifold given byEq. (38) infinite time.Furthermore, the system tracking error e�t� will converge to zero infinite time.
Proof: Now consider the following Lyapunov function:
V � 1
2STmFS�
1
2�1~m2F �
1
2~GTW�1 ~G
Taking the first derivative along the trajectory of the system,substituting formF �q fromEq. (36), and following the steps describedby Eqs. (41–43), we get
_V 1 � ST�mF _��
p
qC _�p=q�1fmFM�q; _q� �UF � G � mF �qdg
�(49)
� ~mFST
�_�� p
qC _�p=q�1fM�q; _q� � �qdg
�
� 1
�1~mF
_mF �p
qSTC _�p=q�1 ~G � ~GTW�1
_G (50)
GODARD AND KUMAR 975
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

Substituting the control law given by Eq. (45) and the parameteradaptation laws given by Eq. (46) in Eq. (49), and then canceling outthe common terms, we get
_V 1 � ST��pqC _�p=q�1� sgn�S�
� �p
qCX
_�p=q�1i �ijSij (51)
for
i� x; y; z
Applying the property given by Eqs. (48–51) will make _V1 < 0.
Because _V1 is negative definite and, as stated before, _V < _V1, it is
proven that _V is also negative definite. Therefore, V is a non-increasing Lyapunov function in the S space. This implies that, as
t!1,V�t� � V1. Thus, we can establish that S, mF, G 2 L1. Thesystem states reach the sliding mode S� 0 in finite timetri jsi�0�j= � �i. When the sliding mode S� 0 is reached, thesystem dynamics are described by the following nonlineardifferential equation:
S� �� C _�p=q � 0 (52)
Therefore, the finite time ts taken for the system to travel from��tr� ≠ 0 to ��tr � ts� � 0 can be derived as the solution to the first-order differential system in Eq. (52). This is given by
tsi ��Cq=�pZ
0
�i�tri�
d�i
�q=�pi
��Cq=�p p
p � q �j�i�0�j1�q=�p
� j�i�tri�j1�q=�p� (53)
Therefore, when the system states reach the nonlinear slidingmanifold in Eq. (38), the trajectory tracking errors � and _� converge tozero in finite time. Using the same procedure described in thestability analysis of the ASMC, presented in the previous section inEqs. (31) and (32),we can show thatS 2 L2. According to the proven
condition fromEq. (51), we have _V <1, fromwhichwe can deduce
the fact that _S 2 L1, and henceS 2 L2 \ L1. Now, usingBarbalat’slemma [58], it can be shown that S! 0 as t!1. Therefore, theadaptive control law described by Eqs. (45) and (46) ensures globalasymptotic convergence of the position and velocity tracking errors.This completes the proof. □
IV. Results
To study the effectiveness and performance of the proposedformation control strategies, the detailed response is numericallysimulated using the set of governing equations of motion (1–5) inconjunction with the proposed control laws [Eqs. (23) and (45)]. Theintegration is carried out using the International Mathematical andStatistical Library routine DDASPG (a double precision subroutineto perform numerical integration), based on the Petzoid–Gearbackward differentiation formula method. The desired states of thesystem are given by Eqs. (6) and (7) for circular formation andprojected circular formation, respectively. The SFF systemparameters and the orbital parameters for the leader spacecraft usedin the numerical simulations are shown in Table 1.
For all numerical examples presented in this section, the netdisturbance forceFd�t� acting on the system is considered to be timevarying, which incorporates gravitational perturbations, atmosphericdrag, and solar radiation pressure perturbative forces. Thedisturbance model is given by (in N)
FdxFdyFdz
24
35� 1:2 � 10�3
1 � 1:5 sin�nt�0:5 sin�2nt�sin�nt�
24
35 (54)
where n is the mean angular velocity and equal to��������������e=a
3c
p(�e is the
gravitational parameter of the Earth and ac is the semimajor axis ofthe leader spacecraft). The control gains and the adaptive gains usedin all simulations for ASMC and ANTSMC are shown in Table 2.The performance evaluation of the proposed control strategiespresented in this section is divided into three subcategories. First, wepresent the effectiveness of the control strategies for a fault-free caseof station keeping and formation maneuvering.We then examine theeffects of actuator degradation, actuator stuck fault, short-termactuator failure, and sensor stuck fault on the performance of theproposed control strategies. Lastly, we illustrate some quantitativeanalysis on fuel consumption and steady-state stabilization errors.
A. Nominal Case
The desired relative motion considered for ideal formationkeeping is a projected circular formation, described by Eq. (7), with a1 km formation radius. The phase angle � between the leader and thefollower spacecraft is assumed to be 0 deg. The initial states for thenumerical simulation are computed by substituting t� 0 in Eq. (7)and adding a 1 km position offset on x, y, and z. The initial velocitycomponents for all states are calculated by taking the time derivativeof Eq. (7) and substituting t� 0. The initial conditions for theparameter estimates and the initial conditions for the relative state areas follows:
X�0� � �1; 0:5 _�m; 2; 0; 1; _�m�T ; mF�0� � 10
G�0� � �0; 0; 0�T(55)
Figure 2 shows relative position errors and thrust demand forformation keeping when there is a 1 km position offset on all threerelative states. The objective is to stabilize the formation when thereis an initial misalignment, while positioning the follower spacecraftin orbit. The control forces are saturated at 10 mN. The advantage ofusing a nonlinear sliding surface can be seen in the error convergenceplots in Fig. 2. Although a 1 km position offset is very high, it wasused to observe the effects of control input saturation. The adaptiveNTSM controller requires less control input when compared withfuel consumed usingASMC, and it can be seen that the control forcesare saturated early in the transient period. The adaptive parameterestimates for this case are shown in Fig. 3.
Next, we demonstrate the effectiveness of the proposed controlstrategies for multiple formation maneuvers. With the same initialconditions as given by Eq. (55), the follower spacecraft moves from a1 to 10 km radius projected circular formation after two orbits andthen after six orbits, the follower spacecraft maneuvers to a circularformation of a 20 km radius. Figure 4 shows the relative positionerrors and thrust demand for multiple formation maneuvers. It isclearly evident thatUy of ASMC saturates for a longer time after thesecond maneuver, which explains the bad performance of ASMC intracking the 20 kmdesired circular formation (y–yd). This can also beobserved in the actual three-dimensional trajectory of the followerspacecraft, plotted in Fig. 5. The adaptive NTSM control scheme
Table 1 Orbital and system parameters
Parameters Values
mF , kg 10�e, km
3 � s�2 398,600rp, km 6878e 0.2�, !, i,M, rad 0
Table 2 Controller parameters used
for numerical analysis
Control gains ASMC ANTSMC
Ci (i� 1, 2, 3) 1 10�3
fp; qg —— f11; 9g�1 0.08 0.08Wi (i� 1, 2, 3) 10�7 10�7
i (i� x, y, z) 0.8 0.8�i (i� x, y, z) 0.1 0.1Ni (i� x, y, z), mN 10 10
976 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

ensures that the follower spacecraft maintain the desired geometrythroughout the entire control process. The parameter estimates ofmass of the follower spacecraft and the external disturbance areshown in Fig. 6. Varying the control gains for ASMC can improve itsperformance, but for comparing two control laws, it is important tokeep the gains the same (as shown in Table 2) for all simulation cases.
B. Fault Case
In this section, we demonstrate the performance of the proposedcontrol strategies when an abrupt actuator fault or sensor fault occurin the system. The control laws derived in Sec. III do not take intoaccount actuator faults explicitly. Therefore, they are designed fornominal system dynamics. Whenever an actuator or sensor fault
0 0.1 0.2 0.3 0.4 0.5 0.6−0.5
0
0.5
1
x −
xd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−0.5
0
0.5
1
y −
yd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−0.5
0
0.5
1
Orbit
z −
zd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Uy [m
N]
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Orbit
Uz [m
N]
Fig. 2 Relative position errors and thrust demand for formation keeping.
0 0.1 0.2 0.3 0.4 0.5 0.6
9.9
9.92
9.94
9.96
9.98
10
10.02
10.04
Orbit
mf
[kg]
0 0.1 0.2 0.3 0.4 0.5 0.60
0.005
0.01
0.015
0.02
0.025
Orbit
Fdx
SMCNTSMC
0 0.1 0.2 0.3 0.4 0.5 0.60
0.005
0.01
0.015
0.02
0.025
Orbit
Fdy
[N]
0 0.1 0.2 0.3 0.4 0.5 0.60
0.005
0.01
0.015
0.02
0.025
Orbit
Fdz
[N]
[N]
Fig. 3 Adaptive parameter estimates for formation keeping.
GODARD AND KUMAR 977
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

occurs, it may deviate the system dynamics from its nominal ones.The objective is to achieve the same control objectives of forma-tion keeping and formation maneuvering in the presence of actu-ator or sensor faults. We consider different fault scenarios in thisstudy:
1) Thefirst case considered is thruster degradation. In this case, theeffectiveness of the thrusters is decreased (LOE) after a certain timeperiod, and it can be characterized by a decrease in actuator gain with
respect to its nominal value given by uFi � �kuFi, where 0< �k < 1,after the failure has occurred.
2)We then assess the case forwhich all three thrusters are stuck at acertain position for a certain time period. This type of fault is calledLIP and is given by uFi � �uFi�tf�, where �uFi denotes the controlinput value at the time instant tf of failure.
3) The third case presented is short-term failure of all threethrusters, given by uFi�tf1 t tf2�.
0 2 4 6 8 10−0.5
0
0.5
1
x −
xd [k
m]
0 2 4 6 8 10−10
−5
0
5
10
y −
yd [k
m]
0 2 4 6 8 10−0.5
0
0.5
1
Orbit
z −
zd [k
m]
0 2 4 6 8 10−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 2 4 6 8 10−15
−10
−5
0
5
10
15
Uy [m
N]
0 2 4 6 8 10−15
−10
−5
0
5
10
15
OrbitU
z [mN
]
Fig. 4 Relative position errors and thrust demand for formation maneuvering.
−20−10
010
20
−50
0
50−20
−10
0
10
20
x [km]y [km]
z [k
m]
−15 −10 −5 0 5 10 15−30
−20
−10
0
10
20
30
x [km]
y [k
m]
SMCNTSMC
−15 −10 −5 0 5 10 15−20
−15
−10
−5
0
5
10
15
20
x [km]
z [k
m]
−30 −20 −10 0 10 20 30−20
−15
−10
−5
0
5
10
15
20
y [km]
z [k
m]
Fig. 5 Actual trajectory of the follower spacecraft for formation maneuvering, 10 orbits (� denotes leader spacecraft).
978 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

4) We also present a case for which all the relative position�x; y; z� sensors jam at a certain position for a particular time period(tf1 t tf2).
For all of the previously mentioned cases, the controller is nevergiven any information of the faults, and therefore the proposedcontrol algorithms accommodate the system faults without theprocess of fault detection and isolation.
Figure 7 shows the controlled position errors and the control inputrequired for formation keeping when all three thrusters can onlysupply 10% of the actuation power after the time instant t� 0:02orbit. The initial conditions for this case are given by X�0��
�0; 0; 0; 0; 0; 0�T . We consider the case for which the leader and thefollower spacecraft are initially at the same location. It is seen thathigh control precision and smooth trajectory tracking are stillobtained even when thrusters have encountered severe degradation.As evident in Fig. 7, the control inputs remain saturated for longerperiods when compared with the case of no fault in Fig. 2. Thedegradation also has an effect on the error convergence of (x–xd) forthe case of ASMC.
Performance of the proposed control algorithms to the LIP faultcase is illustrated in Fig. 8 for the case of formation maneuveringfrom a 1 to 10 km projected circular formation after two orbits, with
0 2 4 6 8 102
4
6
8
10
12
14
Orbits
mf
[kg]
0 2 4 6 8 100
1
2
3
4
5
6x 10
−3
Orbits
Fdx
[N]
SMCNTSMC
0 2 4 6 8 100
0.05
0.1
0.15
0.2
0.25
Orbits
Fdy
[N]
0 2 4 6 8 100
0.005
0.01
0.015
0.02
0.025
Orbits
Fdz
[N]
Fig. 6 Adaptive parameter estimates for formation maneuvering.
0 0.1 0.2 0.3 0.4 0.5 0.6−0.015
−0.01
−0.005
0
0.005
0.01
x −
xd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−1
−0.5
0
0.5
1
y −
yd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−10
−5
0
5x 10
−3
Orbit
z −
zd [k
m]
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Uy [m
N]
0 0.1 0.2 0.3 0.4 0.5 0.6−15
−10
−5
0
5
10
15
Orbit
Uz [m
N]
Fig. 7 Relative position errors and thrust demand for formation keeping when thrusters degrade by 90% after 0.02 orbits.
GODARD AND KUMAR 979
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

the initial conditions specified by Eq. (55). All three control forcesencounter an abrupt blockage between 1 and 2.2 orbits. Because theformation maneuver starts after two orbits, the ASMC controllerexhibits poor performance in tracking the desired trajectory. TheadaptiveNTSMcontroller ensures that the errors accumulated duringthe fault period can be stabilized at a faster rate when compared withASMC. This illustrates the fast convergence property of the NTSMcontroller. Figure 9 demonstrates the LIP fault case for which theposition sensors jam for about half an orbit. Formation keepingwith a1 km initial position offset is considered in this numerical example.The ASMC accumulates large tracking errors, and the control input
saturates for a longer period of time. The adaptive NTSM controllertries to preserve the formation with sensor faults for a period of timeand converges the errorswithout largely affecting the geometry of theformation. Figure 10 presents the adaptive parameter estimates forformation keeping when the position sensors are subjected to abruptblockage from 2 to 2.4 orbits.
Figure 11 presents the relative position errors and control force forthe case for which all three thrusters fail between 0.5 and 1.5 orbits.This case can also be considered to simulate the scenario for whichthe thrusters had to be switched off due to failure of the relativenavigation sensors. With no control for an entire orbit, the follower
0 1 2 3 4−5
0
5
x −
xd [k
m]
0 1 2 3 4−20
−10
0
10
y −
yd [k
m]
0 1 2 3 4−10
−5
0
5
10
Orbits
z −
zd [k
m]
0 1 2 3 4−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 1 2 3 4−15
−10
−5
0
5
10
15
Uy [m
N]
0 1 2 3 4−15
−10
−5
0
5
10
15
OrbitsU
z [mN
]
Fig. 8 Relative position errors and thrust demand for formation maneuvering when thrusters jam between one and two orbits.
0 1 2 3 4 5−2
0
2
4
6
8
x −
xd [k
m]
0 1 2 3 4 5−10
−5
0
5
10
y −
yd [k
m]
0 1 2 3 4 5−10
−5
0
5
10
15
Orbits
z −
zd [k
m]
0 1 2 3 4 5−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 1 2 3 4 5−15
−10
−5
0
5
10
15
Uy [m
N]
0 1 2 3 4 5−15
−10
−5
0
5
10
15
Orbits
Uz [m
N]
Fig. 9 Relative position errors and thrust demand for formation keeping when position sensors jam between 2.0 and 2.4 orbits.
980 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

spacecraft cannot track its desired states satisfactorily while accum-ulating large errors. When the control input gets back into operation,within the same range of position errors, the adaptive NTSMcontroller dictates faster error convergence. It is seen that fairly goodcontrol performance is achieved under this severe scenario withlimited thrust. In the case of ASMC, the system takes a longer time tosettle to the desired formation and themagnitude of the tracking erroraffects the adaptive parameter directly, as seen in Fig. 12. The
adaptive parameters increase instantaneously to cope with thetracking error and the convergence speed of the adaptive NTSMcontroller can be observed in Fig. 12.
C. Quantitative Analysis
Based on the comparison of results of the proposed controlmethodologies presented previously, we examine the control
0 1 2 3 4 50
2
4
6
8
10
12
Orbits
mf
[kg]
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2x 10
−5
Orbits
Fdx
[N]
SMCNTSMC
0 1 2 3 4 50.5
1
1.5
2
2.5
3
3.5
4x 10
−5
Orbits
Fdy
[N]
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5x 10
−5
Orbits
Fdz
[N]
Fig. 10 Adaptive parameter estimates for formation keeping when position sensors jam between 2.0 and 2.4 orbits.
0 0.5 1 1.5 2 2.5 3−0.5
0
0.5
1
1.5
x −
xd [k
m]
0 0.5 1 1.5 2 2.5 3−8
−6
−4
−2
0
2
y −
yd [k
m]
0 0.5 1 1.5 2 2.5 3−2
0
2
4
Orbits
z −
zd [k
m]
0 0.5 1 1.5 2 2.5 3−15
−10
−5
0
5
10
15
Ux [m
N]
SMCNTSMC
0 0.5 1 1.5 2 2.5 3−15
−10
−5
0
5
10
15
Uy [m
N]
0 0.5 1 1.5 2 2.5 3−15
−10
−5
0
5
10
15
Orbits
Uz [m
N]
Fig. 11 Relative position errors and thrust demand for formation keeping when thrusters fail between 0.5 and 1.5 orbits.
GODARD AND KUMAR 981
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

precision and fuel consumption. In assessing the effectiveness of theASMC and NTSM controllers, the accuracy with which theformation can bemaintained is an important criteria. Futuremissionsof SFF for high-resolution interferometry and stereographic imagingdemand high resolution and precision requirements for stationkeeping. The maximum steady-state stabilization errors for all threedirections for ASMC and NTSMC are compared in Table 3.
We considered an initial misalignment position offset of 100 m inall three directions and external disturbances for cases for which theleader spacecraft is in a circular and elliptic reference orbit (e� 0:2).Both controllers are extensively tuned for fair comparison. Theadaptive NTSMC provides much better results when compared withany VSC-based control algorithm present in current literature [39–43]. It is clearly evident from the values of the largest steady-stateerrors that ASMC and NTSM control schemes satisfy the require-ment of submillimeter precision in formation keeping. The steady-state norm of the tracking errors (between 5 to 10 orbits), obtainedusing both control algorithms when the leader spacecraft was in acircular reference, orbit is shown in Fig. 13.
The fuel consumption for all three thrusters are calculated for thesame simulations described previously, and their respective �Vrequirements are shown inTable 4. The�V is calculated based on theaverage budget obtained over a period of 10 orbits. The adaptiveNTSM controller requires less fuel to correct for an initial positionoffset of 100 m in 0.2 orbits when compared with ASMC technique.For an elliptical orbit (e� 0:2), the corresponding fuel costs in termsof �V for both controllers are also shown in Table 4. We also
calculate the cost required for formation keeping as the result of theintegral:
J�Z�
0
�U2Fx �U2
Fy �U2Fz� d� (56)
0 0.5 1 1.5 2 2.5 30
50
100
150
200
Orbits
mf
[kg]
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
6x 10
−4
Orbits
Fdx
[N]
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
3.5x 10
−4
Orbits
Fdy
[N]
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
−4
Orbits
Fdz
[N]
SMCNTSM
Fig. 12 Adaptive parameter estimates for formation keeping when thrusters fail between 0.5 and 1.5 orbits.
Table 3 Steady-state stabilization errors
Circular reference orbit Elliptic reference orbit
Tracking error, km ASMC ANTSMC ASMC ANTSMC
jexj 2:4 � 10�5 5:6 � 10�8 7:8 � 10�4 1:5 � 10�7
jeyj 1:1 � 10�5 2:8 � 10�8 4:2 � 10�4 0:5 � 10�7
jezj 6:3 � 10�5 3:5 � 10�8 1:5 � 10�4 1:3 � 10�7
5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 100
0.2
0.4
0.6
0.8
1
1.2x 10−5
Orbits
|| [e
x ey e
z]T ||
[km
]
SMCNTSMC
Fig. 13 Comparison of steady-state tracking errors.
Table 4 Fuel consumption per orbit
Circular reference orbit Elliptic reference orbit
Fuel consumption,m=s (per orbit)
ASMC ANTSMC ASMC ANTSMC
�Vx 0.0409 0.0231 0.1382 0.1211�Vy 0.1183 0.0374 0.1541 0.0734�Vz 0.0555 0.0235 0.3050 0.2627
982 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

where � � 10 is the number of orbits of the leader spacecraft.Figure 14 shows the comparison of fuel cost over a period of 10leader orbits for the ASMC and NTSM control schemes. Based onthe comparison of control precision and fuel requirements, it isclearly evident that the proposed adaptive nonlinear hyperplane-based SMC provides a much better performance when comparedwith an SMC designed using a linear sliding surface.
V. Conclusions
In this paper, we presented an ANTSMC scheme based on anonlinear sliding surface and an ASMC algorithm based on a con-ventional linear sliding surface for amultiple SFF system comprisinga leader and a follower spacecraft. Uncertainties in the mass of thefollower spacecraft and the external disturbances with an unknownbound were employed in the development of the adaptive parameterupdate laws. Although nonlinear control algorithms have beenpublished in the literature for formation flying in LEO, very few haveaddressed fault recovery, robustness, and adaptation with thrustersaturation. We considered several scenarios of actuator and sensorfaults that could introduce constant or state-dependant disturbancesinto the overall closed-loop system, causing the dynamics of thefollower spacecraft to deviate largely from their nominal regime.Numerical simulations show that the ASMC andANTSMCmethodswere able to stabilize the formation and execute multiple formationmaneuvers in the presence of actuator and sensor faults. The fasterconvergence rate property of the ANTSMC technique proved to beeffective in reducing the tracking errors, providing submillimeterprecision while keeping fuel consumption at a low level whencomparedwithASMCand other variable-structure-based controllersdeveloped in the literature. Overall, the numerical results clearlyestablish the robustness of the proposed adaptive control method-ologies in tracking a desired formation in the presence of subsystemfaults, model uncertainties, and time-varying disturbances.
References
[1] Neeck, S. P., Magner, T. J., and Paules, G. E., “NASA’s Small SatelliteMissions for Earth Observation,” Acta Astronautica, Vol. 56, Nos. 1–2,2005, pp. 187–192.doi:10.1016/j.actaastro.2004.09.034
[2] Bristow, J., Folta, D., and Hartman, K., “A Formation FlyingTechnology Vision,” AIAA Space 2000 Conference and Exposition,AIAA Paper 2000-5194, 19–21 Sept. 2000.
[3] Cabeza, I., and Martinez, A., “SMART-2: An ESA Mission toDemonstrate theKeyTechnologies for Formation Flying andDrag-FreeControl,” Proceedings of the 1st International Symposium on Forma-
tion Flying Missions and Technologies, Centre National d’EtudesSpatiales, Toulouse, France, 29–30 Oct. 2002.
[4] Folta, D., Bristow, J., Hawkins, A., andDell, G., “NASA’s AutonomousFormation Flying Technology Demonstration, Earth Observing-1,”
First International Symposium on Formation Flying Missions and
Technologies, Centre National d’Etudes Spatiales, Toulouse, France,29–30 Oct 2002.
[5] Folta, D., and Quinn, D., “Enhanced Formation Flying for the EarthObserving-1 (EO-1) New Millennium Mission,” Proceedings of the
Flight Mechanics Symposium, NASA Goddard Space Flight Center,Greenbelt, MD, 1997, pp. 405–406.
[6] Burns, R., McLaughlin, C., Leitner, J., and Martin, M., “TechSat 21:Formation Design, Control, and Simulation,” Proceedings of the IEEEAerospace Conference, Vol. 7, IEEE Publ., Piscataway, NJ, 2000,pp. 19–25.
[7] Das,A., andCobb,R., “TechSat21:SpaceMissionsUsingCollaboratingConstellationsandSatellites,”Proceedingsof the12thAIAA/USUAnnual
Conference on Small Satellites, AIAA, Reston, VA, 1998, pp. 1–20.[8] Lawson, P., “The Terrestrial Planet Finder,” IEEE Aerospace
Conference Proceedings, Vol. 4, IEEE Publ., Piscataway, NJ, 10–17 March 2001, pp. 2005–2011.
[9] Lawson, P., Lay,O.,Martin, S., Peters, R., Gappinger, R., Ksendzov,A.,Scharf, D., Booth, A., Beichman, C., Serabyn, E., Johnston, K., andDanchi, W., “Terrestrial Planet Finder Interferometer: 2007–2008Progress and Plans,”Proceedings of the SPIE: the International Societyfor Optical Engineering, Optical and Infrared Interferometry
Conference, Vol. 7013, SPIE, Bellingham, WA, June 2008, pp. 1–15.[10] How, J., Twiggs, R.,Weidow, D., Hartman, K., and Bauer, F., “Orion: A
Low-Cost Demonstration of Formation Flying in Space Using GPS,”AIAA/AAS Astrodynamics Specialist Conference, AIAA Paper 98-4398, Aug. 1998.
[11] Persson, S., Jacobsson, B., and Gill, E., “Prisma: DemonstrationMission forAdvancedRendezvous and Formation FlyingTechnologiesandSensors,” International Astronautical Federation: 56th InternationalAstronautical Congress 2005, Vol. 4, International AstronauticalCongress Paper 05-B56B07, Paris, Oct 2005.
[12] Wallner, O., Ergenzinger, K., Flatscher, R., and Johann, U., “FormationFlying Aspects of Different Instrument Concepts for DARWIN/TPF-I,”Proceedings of the 3rd International Symposium on Formation Flying,
Missions, and Technologies, ESA, Noordwijk, The Netherlands,April 2008.
[13] Borde, J., Schirmann, T., Barillot, P., Villien, A., Ergenzinger, K.,Barrena, V., and Lumb, D., “Ground Validation of Formation FlyingTechniques and Technologies,” Proceedings of the 3rd International
Symposium on Formation Flying, Missions, and Technologies, ESA,Noordwijk, The Netherlands, 23–25 April 2008.
[14] Barret, D., Belloni, T., Bhattacharyya, S., Gilfanov, M., Homan, J.,Mendez,M.,Miller, J.,Miller,M.,Mereghetti, S., Paltani, S., Poutanen,J., Wilms, J., and Zdziarski, A., “Science With the XEUS High TimeResolution Spectrometer,” Proceedings of the SPIE, the InternationalSociety for Optical Engineering, Space Telescopes, and Instrumenta-
tion 2008: Ultraviolet to Gamma Ray, Vol. 7011, SPIE, Bellingham,WA, 23 June 2008, pp. 1–15.
[15] Bauer, F., Bristow, J., Carpenter, J., Garrison, J., Hartman, K., Lee, T.,Long, A., Kelbel, D., Lu, V., How, J., Busse, F., Axelrad, P., andMoreau,M., “Enabling Spacecraft Formation Flying inAnyEarthOrbitThrough Spaceborne GPS and Enhanced Autonomy Technologies,”Space Technology, Vol. 20, No. 4, 2001, pp. 175–185.
[16] Hill, G., “Researches in the Lunar Theory,” American Journal of
Mathematics, Vol. 1, No. 1, 1878, pp. 5–26.doi:10.2307/2369430
[17] Clohessy, W. H., and Wiltshire, R. S., “Terminal Guidance System forSatellite Rendezvous,” Journal of the Aerospace Sciences, Vol. 27,No. 9, 1960, pp. 653–658.
[18] Kapila, V., Sparks, A. G., Buffington, J. M., and Yan, Q., “SpacecraftFormation Flying: Dynamics and Control,” Journal of Guidance,
Control, and Dynamics, Vol. 23, No. 3, 2000, pp. 561–564.doi:10.2514/2.4567
[19] Sabol, C., Burns, R., and McLaughlin, C., “Satellite Formation FlyingDesign and Evolution,” Journal of Spacecraft and Rockets, Vol. 38,No. 2, 2001, pp. 270–278.doi:10.2514/2.3681
[20] Inalhan, G., Tillerson, M., and How, J. P., “Relative Dynamics andControl of Spacecraft Formations in Eccentric Orbits,” Journal of
Guidance, Control, and Dynamics, Vol. 25, No. 1, 2002, pp. 48–59.doi:10.2514/2.4874
[21] Vaddi, S. S., Vadali, S. R., and Alfriend, K. T., “Formation Flying:Accommodating Nonlinearity and Eccentricity Perturbations,” Journalof Guidance, Control, and Dynamics, Vol. 26, No. 2, 2003, pp. 214–223.doi:10.2514/2.5054
[22] Gurfil, P., “Relative Motion Between Elliptic Orbits: GeneralizedBoundedness Conditions and Optimal Formation Keeping,” Journal of
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2 x 10−4
Orbits
Fue
l Cos
t [m
2 /s3 ]
SMCNTSMC
Fig. 14 Formation keeping fuel cost comparison for 10 orbits.
GODARD AND KUMAR 983
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80

Guidance, Control, and Dynamics, Vol. 28, No. 4, 2005, pp. 761–767.doi:10.2514/1.9439
[23] Xing, J.-J., Tang, G.-J., Xi, A.-N., and Li, H.-Y., “Satellite FormationDesign and Optimal Stationkeeping Considering Nonlinearity andEccentricity,” Journal of Guidance, Control, and Dynamics, Vol. 30,No. 5, 2007, pp. 1523–1528.doi:10.2514/1.26745
[24] Gim, D.-W. and Alfriend, K., “State Transition Matrix of RelativeMotion for the Perturbed Noncircular Reference Orbit,” Journal of
Guidance, Control, and Dynamics, Vol. 26, No. 6, 2003, pp. 956–971.doi:10.2514/2.6924
[25] Yamanaka, K., and Ankersen, F., “New State Transition Matrix forRelativeMotion on an Arbitrary Elliptical Orbit,” Journal of Guidance,Control, and Dynamics, Vol. 25, No. 1, 2002, pp. 60–66.doi:10.2514/2.4875
[26] Chobotv, V., Orbital Mechanics, AIAA Education Series, AIAA,Reston, VA, 2002.
[27] Schaub, H., and Alfriend, K. T., “J2 Invariant Relative Orbits forFormation Flying,” Celestial Mechanics and Dynamical Astronomy,Vol. 79, No. 2, 2001, pp. 77–95.doi:10.1023/A:1011161811472
[28] Schweighart, S. A., and Sedwick, R. J., “High-Fidelity Linearized J2Model for Satellite Formation Flight,” Journal of Guidance, Control,and Dynamics, Vol. 25, No. 6, 2002, pp. 1073–1080.doi:10.2514/2.4986
[29] Richardson,D., andMitchell, J., “AThird-OrderAnalytical Solution forRelative Motion with a Circular Reference Orbit,” Journal of the
Astronautical Sciences, Vol. 51, No. 1, 2003, pp. 1–12.[30] Hu, Y.-R., and Ng, A., “Robust Control of Spacecraft Formation
Flying,” Journal of Aerospace Engineering, Vol. 20, No. 4, 2007,pp. 209–214.doi:10.1061/(ASCE)0893-1321(2007)20:4(209)
[31] Ghosh, P., and Bosse, A., “A Study of Linear and Nonlinear SatelliteFormation Flying Control Methodologies from a Fuel ConsumptionPerspective,” AIAA Space 2007 Conference and Exposition, Vol. 1,AIAA Paper 2007-6083, Sept 2007.
[32] Xu, Y., Fitz-Coy, N., Lind, R., and Tatsch, A., “� Control for SatellitesFormation Flying,” Journal of Aerospace Engineering, Vol. 20, No. 1,2007, pp. 10–21.doi:10.1061/(ASCE)0893-1321(2007)20:1(10)
[33] Vignal, P., and Pernicka, H., “Low-Thrust Spacecraft FormationKeeping,” Journal of Spacecraft and Rockets, Vol. 43, No. 2, 2006,pp. 466–475.doi:10.2514/1.11117
[34] Vaddi, S., and Vadali, S., “Linear and Nonlinear Control Laws forFormation Flying,” Spaceflight Mechanics 2003, Part 1: Advances in
the Astronautical Sciences, Vol. 114, American Astronautical Society,Springfield, VA, 2003, pp. 171–188.
[35] Won, C.-H., and Ahn, H.-S., “Nonlinear Orbital Dynamic Equationsand State-Dependent Riccati Equation Control of Formation FlyingSatellites,” Journal of the Astronautical Sciences, Vol. 51, No. 4, 2003,pp. 433–449.
[36] Stansbery, D., and Cloutier, J., “Nonlinear Control of SatelliteFormation Flight,” AIAA Guidance, Navigation, and ControlConference and Exhibit, AIAA Paper 2000-4436, Aug 2000.
[37] Yan, Q., Yang, G., Kapila, V., and de Queiroz, M. S., “NonlinearDynamics and Output Feedback Control of Multiple Spacecraft InElliptical Orbits,” Proceedings of the American Control Conference,Vol. 2, IEEE Publ., Piscataway, NJ 28–30 Jun 2000, pp. 839–843.
[38] Wang, P., and Hadaegh, F., “Coordination and Control of MultipleMicrospacecraft Moving in Formation,” Journal of the Astronautical
Sciences, Vol. 44, No. 3, 1996, pp. 315–355.[39] Yeh,H.-H., Nelson, E., and Sparks,A., “Nonlinear TrackingControl for
Satellite Formations,” Journal of Guidance, Control, and Dynamics,Vol. 25, No. 2, 2002, pp. 376–386.doi:10.2514/2.4892
[40] Lim, H.-C., Bang, H.-C., Park, K.-D., and Park, P.-H., “TrackingControl DesignUsing SlidingMode Techniques for Satellite FormationFlying,” Journal of Astronomy and Space Sciences, Vol. 20, No. 4,2003, pp. 365–374.
[41] Massey, T., and Shtessel, Y., “Continuous Traditional and High-OrderSliding Modes for Satellite Formation Control,” Journal of Guidance,Control, and Dynamics, Vol. 28, No. 4, 2005, pp. 826–831.doi:10.2514/1.14126
[42] Wang, Z., and Zhang, Y., “Design and Verification of a RobustFormation Keeping Controller,” Acta Astronautica, Vol. 61, Nos. 7–8,
2007, pp. 565–574.doi:10.1016/j.actaastro.2007.01.064
[43] Liu, H., Li, J., and Hexi, B., “Sliding Mode Control for Low-ThrustEarth-Orbiting Spacecraft Formation Maneuvering,” Aerospace
Science and Technology, Vol. 10, No. 7, 2006, pp. 636–643.doi:10.1016/j.ast.2006.04.008
[44] Hadaegh, F., Lu, W.-M., and Wang, P., “Adaptive Control ofFormation Flying Spacecraft for Interferometry,” Proceedings of the
8th IFAC/IFORS/IMACS/IFIP Symposium on Large Scale Systems:
Theory and Applications, Vol. 1, Elsevier, Oxford, 15 July 1998,pp. 117–122.
[45] Wang, Z., Khorrami, F., and Grossman, W., “Robust Adaptive Controlof Formationkeeping for a Pair of Satellites,” Proceedings of the
American Control Conference, Vol. 2, IEEE Publ., Piscataway, NJ,June 2000, pp. 834–838.
[46] deQueiroz,M. S., Kapila, V., andYan, Q., “AdaptiveNonlinear Controlof Multiple Spacecraft Formation Flying,” Journal of Guidance,
Control, and Dynamics, Vol. 23, No. 3, 2000, pp. 385–390.doi:10.2514/2.4549
[47] Yan, Q., Yang, G., Kapila, V., and de Queiroz, M. S., “NonlinearDynamics, Trajectory Generation, and Adaptive Control of MultipleSpacecraft in Periodic Relative Orbits,” Advances in the Astronautical
Sciences: Guidance and Control 2000, edited by R. D. Culp, and E. M.Dukes, Vol. 104, American Astronautical Society, Springfield, VA,2000, pp. 159–174.
[48] Wong, H., Pan, H., De Queiroz, M. S., and Kapila, V., “AdaptiveLearning Control for Spacecraft Formation Flying,” Proceedings of theIEEE Conference on Decision and Control, Vol. 2, IEEE Publ.,Piscataway, NJ, Dec 2001, pp. 1089–1094.
[49] Wong, H., Kapila, V., and Sparks, A. G., “Adaptive Output FeedbackTracking Control of Spacecraft Formation,” International Journal of
Robust and Nonlinear Control, Vol. 12, Nos. 2–3, 2002, pp. 117–139.doi:10.1002/rnc.679
[50] Pongvthithum, R., Veres, S., Gabriel, S., and Rogers, E., “UniversalAdaptive Control of Satellite Formation Flying,” International Journalof Control, Vol. 78, No. 1, 2005, pp. 45–52.doi:10.1080/00207170412331330887
[51] Ren, W., and Beard, R., “Formation Feedback Control for MultipleSpacecraft Via Virtual Structures,” IEEE Proceedings: Control Theory
and Applications, Vol. 151, No. 3, 2004, pp. 357–368.doi:10.1049/ip-cta:20040484
[52] Lim, H.-C., and Bang, H., “Adaptive Control for Satellite FormationFlying Under Thrust Misalignment,” Acta Astronautica, Vol. 65,Nos. 1–2, 2009, pp. 112–122.doi:10.1016/j.actaastro.2009.01.022
[53] Boskovic, J., Li, S.-M., and Mehra, R., “Robust Adaptive VariableStructure Control of Spacecraft Under Control Input Saturation,”Journal of Guidance, Control, and Dynamics, Vol. 24, No. 1, 2001,pp. 14–22.doi:10.2514/2.4704
[54] Feng, Y., Yu, X., and Man, Z., “Non-Singular Terminal Sliding ModeControl of Rigid Manipulators,” Automatica, Vol. 38, No. 12, 2002,pp. 2159–2167.doi:10.1016/S0005-1098(02)00147-4
[55] Sharma, R., Sengupta, P., and Vadali, S. R., “Near-Optimal FeedbackRendezvous in Elliptic Orbits Accounting for Nonlinear DifferentialGravity,” Journal of Guidance, Control, and Dynamics, Vol. 30, No. 6,2007, pp. 1803–1813.doi:10.2514/1.26650
[56] Yan, H., Alfriend, K. T., Vadali, S. R., and Sengupta, P., “OptimalDesign of Satellite Formation Relative Motion Orbits Using Least-Squares Methods,” Journal of Guidance, Control, and Dynamics,Vol. 32, No. 2, 2009, pp. 599–604.doi:10.2514/1.35044
[57] Popov, V., Hyperstability of Control Systems, Springer, Berlin, 1973.[58] Slotine, J., and Li, W., Applied Nonlinear Control, Prentice–Hall,
Upper Saddle River, NJ, 1991.[59] Yuqiang, W., Xinghuo, Y., and Zhihong, M., “Terminal Sliding Mode
Control Design for Uncertain Dynamic Systems,” Systems and ControlLetters, Vol. 34, No. 5, 1998, pp. 281–287.doi:10.1016/S0167-6911(98)00036-X
[60] Zhihong, M., Paplinski, A., and Wu, H., “Robust MIMO TerminalSliding Mode Control Scheme for Rigid Robotic Manipulators,” IEEETransactions on Automatic Control, Vol. 39, No. 12, 1994, pp. 2464–2469.doi:10.1109/9.362847
984 GODARD AND KUMAR
Dow
nloa
ded
by U
NIV
ER
SIT
E L
AV
AL
on
July
6, 2
014
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.385
80