Faces of Poisson–Voronoi Mosaics -...
24
Probability Theory and Related Fields manuscript No. (will be inserted by the editor) Faces of Poisson–Voronoi Mosaics Daniel Hug · Rolf Schneider Received: date / Accepted: date Abstract For a stationary Poisson–Voronoi tessellation in Euclidean d -space and for k ∈{1,..., d }, we consider the typical k-dimensional face with respect to a natural centre function. We express the distribution of this typical k-face in terms of a certain Poisson process of closed halfspaces in a k-dimensional space. Then we show that, under the condition of large inradius, the relative boundary of the typical k-face lies, with high probability, in a narrow spherical annulus. Keywords Poisson–Voronoi tessellation · typical k-face · spherical shape Mathematics Subject Classification (2000) 60D05 · 52A20 1 Introduction The Voronoi tessellation induced by a stationary Poisson point process in Euclidean space R d is probably the most intensively studied special model of a random mosaic. In low dimensions, it has many applications in various areas of science (see the hints in the books by Stoyan, Kendall and Mecke [15] and by Okabe, Boots, Sugihara and Daniel Hug Karlsruhe Institute of Technology Department of Mathematics Kaiserstr. 89–93 D-76128 Karlsruhe Germany E-mail: [email protected] Rolf Schneider Mathematisches Institut Albert-Ludwigs-Universit¨ at Eckerstr.1 D-79104 Freiburg i. Br. Germany E-mail: [email protected]
Transcript of Faces of Poisson–Voronoi Mosaics -...

Probability Theory and Related Fields manuscript No.(will be inserted by the editor)
Faces of Poisson–Voronoi Mosaics
Daniel Hug · Rolf Schneider
Received: date / Accepted: date
Abstract For a stationary Poisson–Voronoi tessellation in Euclidean d-space and for
k ∈ 1, . . . ,d, we consider the typical k-dimensional face with respect to a natural
centre function. We express the distribution of this typical k-face in terms of a certain
Poisson process of closed halfspaces in a k-dimensional space. Then we show that,
under the condition of large inradius, the relative boundary of the typical k-face lies,
with high probability, in a narrow spherical annulus.
Keywords Poisson–Voronoi tessellation · typical k-face · spherical shape
Mathematics Subject Classification (2000) 60D05 · 52A20
1 Introduction
The Voronoi tessellation induced by a stationary Poisson point process in Euclidean
space Rd is probably the most intensively studied special model of a random mosaic.
In low dimensions, it has many applications in various areas of science (see the hints
in the books by Stoyan, Kendall and Mecke [15] and by Okabe, Boots, Sugihara and
Daniel Hug
Karlsruhe Institute of Technology
Department of Mathematics
Kaiserstr. 89–93
D-76128 Karlsruhe
Germany
E-mail: [email protected]
Rolf Schneider
Mathematisches Institut
Albert-Ludwigs-Universitat
Eckerstr.1
D-79104 Freiburg i. Br.
Germany
E-mail: [email protected]

2
Chiu [11]), and in general it offers quite a number of mathematical challenges. We
refer to the lecture notes by Møller [10] and the references in Section 10.3 of [14].
In [1], Baumstark and Last have obtained fairly general distributional properties
of stationary Poisson–Voronoi tessellations. The present paper continues such inves-
tigations, but is somehow complementary to [1]. A k-dimensional face F in a Voronoi
tessellation is (in general) the intersection of d − k+ 1 cells of the tessellation, and
the nuclei of these cells are called the neighbours of F . These neighbours lie on the
relative boundary of a (d − k)-dimensional ball. We call the radius of this ball the
co-radius of F and its centre the generalized nucleus of F . This point lies in the affine
hull of F , but not necessarily in F (except if k = d or k = 0). For the weighted typical
k-face of a stationary Poisson–Voronoi tessellation and, to a lesser extent, for the typ-
ical k-face, Baumstark and Last have unified and extended several earlier results and
have established various distributional properties of the neighbours. Our focus here
is on the distribution of the typical k-face itself. We find representations (as explicitly
as possible) for the joint distribution of the typical k-face and its co-radius (Theo-
rem 2), as well as for the regular conditional distribution of the typical k-face, given
the co-radius. This is expressed in terms of the intersection of a Poisson process of
k-dimensional closed halfspaces, with explicitly given intensity measure (Theorem
3).
We use this information to obtain a result on the approximate spherical shape of
typical k-faces with large inradius in a stationary Poisson–Voronoi tessellation. Re-
sults of this type were first obtained by Calka [2], who determined the joint distribu-
tion of inradius and circumradius of the typical cell of a two-dimensional stationary
Poisson–Voronoi mosaic and deduced that, under the condition that the inradius is
equal to r, the boundary of the typical cell is, with high probability, contained in a
circular ring of width tending to zero with r tending to infinity (the approach does not
extend to higher dimensions). Further related limit theorems in the plane were proved
by Calka und Schreiber [3]. In [4], the same authors remark that similar results for
the typical Poisson–Voronoi cell in higher dimensions can be deduced from their ob-
tained results on random polytopes in balls and will be developed in future work. It
appears that lower-dimensional typical faces require other methods. With a different
approach (adapted from the work [5], [6] on extensions of D.G. Kendall’s problem),
we establish here a similar result on typical k-faces.
Let Z(k) denote the typical k-face (where k ∈ 1, . . . ,d) of a stationary Poisson–
Voronoi tessellation in Rd , with respect to the generalized nucleus as centre function
(precise definitions are given in Section 2). We denote by Bd the unit ball with centre
at the origin and by affK the affine hull of a set K in Rd . For a convex body K we
define
Rm(K) := maxr ≥ 0 : rBd ∩ affK ⊂ Kif o ∈ K, otherwise we formally set Rm(K) =−1, and we put
RM(K) := minr ≥ 0 : K ⊂ rBd.
Then we define
R(k)m := Rm(Z
(k)), R(k)M := RM(Z(k)).

3
Theorem 1 Let ρ ≥ 1, let k ∈ 1, . . . ,d, and choose β with
0 < β <2d− k− 1
k+ 1, so that α := d− (1+β )
k+ 1
2> 0.
Then there exist constants c1, depending only on the dimension d and on a positive
lower bound for the intensity γ of the underlying Poisson process, and c2, depending
only on the dimension d, such that
P
R(k)M > ρ +ρ−β | R
(k)m ≥ ρ
≤ c1 exp [−c2γρα ] .
In the assumption ρ ≥ 1 one could choose a different positive lower bound for
ρ ; this would affect only the constants. Note that the thickness ρ−β of the annulus
containing, with high probability, the relative boundary of Z(k) decreases if the di-
mension k becomes smaller. In the special case k = d = 2 considered in [2], we have
0 < β < 1/3 and α = 12(1− 3β ), which is consistent with [2, Th. 5].
A few explanations concerning Theorem 1 are in order. The theorem expresses,
in a precise way, the following information about the shape of the typical k-face Z(k)
with respect to the generalized nucleus as centre function. Under the condition that
Z(k) contains the ball ρB(k) := ρ(Bd ∩ affZ(k)), it even satisfies
B(k) ⊂ 1
ρZ(k) ⊂
(1+
1
ρ1+β
)B(k)
with overwhelming probability; thus Z(k) is approximately a ball, with increasing
precision as ρ →∞. Theorem 1 belongs, therefore, to a group of results on asymptotic
shapes of cells and faces in random mosaics under the condition of large size, which
was initiated by a problem of D.G. Kendall (for this, see [15, p. ix]). Kendall’s original
problem concerned the zero cell of an isotropic stationary Poisson line tessellation in
the plane, under the condition of large area. Later extensions measured the size also
by other functionals, and extended the problem in various ways, also to Poisson–
Voronoi tessellations. For these, in [5] the asymptotic shape of large typical cells
(with respect to the nucleus) was determined, with large size either measured by
the volume (or an intrinsic volume) or the inradius with respect to the nucleus. In
contrast to the case of stationary Poisson hyperplane tessellations, where results on
asymptotic shapes of (weighted or unweighted) typical k-faces under the condition
of large k-volume were proved in [7] for k < d, it remains an open problem whether
similar results hold for Poisson–Voronoi mosaics, with the size of typical k-faces
measured by k-volume. If, however, size is measured by the inradius with respect to
the generalized nucleus, then Theorem 1 provides such a result, giving generalized
variants of the case of cells treated in [5] and of the estimates in the planar case
obtained by Calka [2]. That the generalized nucleus plays a particular role in the
geometry of faces in Poisson–Voronoi mosaics was already clear, for example from
the distributional results of Baumstark and Last [1]. It is, therefore, not surprising
that the assumption that the generalized nucleus of a face is deep inside the face,
has strong consequences for the geometry of the face. Of course, the assumption
R(k)m ≥ 0 implies that the typical k-face contains its generalized nucleus. We compute

4
the probability of this event in a remark after Theorem 3. It should be observed that
the condition of large inradius with respect to the generalized nucleus is not only
a condition of large size, as in the Kendall type problems, but also a condition on
the position of the face with respect to its generalized nucleus. Whether for k < d
there are asymptotic shapes of typical k-faces in Poisson–Voronoi mosaics under size
conditions alone, remains open.
We give a brief outline of the following sections. First we recall the construction
of the faces of a Voronoi mosaic and define the co-radius of a face as the distance of
the affine hull of the face from its neighbouring nuclei. Using Palm distributions, we
define the typical k-face and the typical k-co-radius of the Voronoi mosaic induced
by a stationary Poisson process X . Theorem 2 expresses the joint distribution of these
random objects by an integral over R×G(d,d − k), involving a random polytope
Z(L,r; X)⊂ L⊥ which is defined for each subspace L in the Grassmannian G(d,d−k)and each positive number r. In Section 3 this random polytope is then identified as
the intersection of a Poisson process of closed halfspaces, and the main purpose of
that section is to determine the intensity measure of this process (Theorem 3). Alto-
gether, the obtained information on the distribution of the typical k-face is sufficient
to represent the conditional distribution appearing in Theorem 1 in a way allowing
the required estimation. This is done in Section 4, where a few more explanations
will be given.
2 The distribution of the typical k-face
We work in d-dimensional Euclidean space Rd (d ≥ 2), with scalar product 〈·, ·〉 and
induced norm ‖ · ‖. Unit ball and unit sphere are denoted, respectively, by Bd and
Sd−1. Lebesgue measure on Rd is denoted by λ and spherical Lebesgue measure on
Sd−1 by σ . The space G(d,k) is the Grassmannian of k-dimensional linear subspaces,
and νk is its rotation invariant probability measure. For L ∈ G(d,k), let SL := Sd−1∩L
denote the unit sphere in L, λL the k-dimensional Lebesgue measure on L, and σL the
(k−1)-dimensional spherical Lebesgue measure on SL. We write λ1 for the Lebesgue
measure on R. The space of convex bodies (nonempty, compact, convex subsets) of
Rd is denoted by K ; it is equipped with the Hausdorff metric. For a topological space
T we denote by B(T ) its Borel σ -algebra. Measures, without further specification,
are Borel measures.
We need first a description of the k-faces of a Voronoi mosaic and recall some
facts from [14, p. 472]. Let η be a subset of Rd which is admissible. By this we
mean that η is locally finite, in general position (that is, any p+1 points of η are not
contained in a (p−1)-dimensional plane, p = 1, . . . ,d), in general quadratic position
(that is, no d + 2 points of η lie on some sphere), and the convex hull of η is Rd . A
realization of a stationary Poisson point process in Rd with positive intensity is a.s.
admissible. By V (η) we denote the Voronoi mosaic generated by η (that is, the set
of Voronoi cells of η). Let k ∈ 0, . . . ,d, and let x0, . . . ,xd−k ∈ η be d − k+ 1 dis-
tinct points. There is a unique closed ball Bd−k(x0, . . . ,xd−k) of dimension d − k that
contains these points in its relative boundary. We denote by z(x0, . . . ,xd−k) its centre
and by E(x0, . . . ,xd−k) the k-dimensional affine subspace through z(x0, . . . ,xd−k) and

5
orthogonal to the affine hull of Bd−k(x0, . . . ,xd−k). Let B0(y,r) denote the open ball
with centre y and radius r and
S(x0, . . . ,xd−k;η) := y ∈ E(x0, . . . ,xd−k) : B0(y,‖y− x0‖)∩η = /0.
If S(x0, . . . ,xd−k;η) 6= /0, then F = S(x0, . . . ,xd−k;η) is a k-face of V (η), and every
k-face of V (η) is obtained in this way, for uniquely determined points x0, . . . ,xd−k.
We put z(x0, . . . ,xd−k) =: z(F,η) and call this point the generalized nucleus of F
(though it need not be contained in F); for k = d it is the nucleus of F . The radius of
the ball Bd−k(x0, . . . ,xd−k) is called the co-radius of F and denoted by R(F,η).If V (η) contains a unique k-face F with z(F,η) = o, we denote this face by
Fko (η).
Now let X be a stationary Poisson point process in Rd with intensity γ > 0. Let
X (d) =V (X) be the Voronoi tessellation generated by X , let X (k) be the process of its
k-faces and γ(k) the intensity of X (k), for k = 0, . . . ,d (the explicit values of γ(k) for
d = 2,3 are listed in [14, Th. 10.2.5]; for d = 4, see the remark at the top of page 68
in [9]). In particular, γ(d) = γ; cf. [14, (10.32)].
We denote the underlying probability space by (Ω ,A,P) (and suppose in the fol-
lowing that it is large enough), and E denotes mathematical expectation. By
Nk := ∑F∈X(k)
δz(F,X),
where δ denotes a Dirac measure, we define a stationary random measure on Rd and
denote by P0Nk
the Palm distribution of X with respect to Nk. Let Y be a point pro-
cess (defined on the underlying probability space) with distribution P0Nk
. The Voronoi
mosaic V (Y ) has a.s. a unique k-face with generalized nucleus at o. We define
Z(k) := Fko (Y ), R(k) := R(Z(k),Y )
and call Z(k) the typical k-face and R(k) the typical k-co-radius of X (d), both with
respect to the generalized nucleus as centre function. (Note that the terminology ‘of
X (d)’ is correct, since X (d) determines X .)
For the joint distribution of Z(k) and R(k) we obtain (e.g., by the line of reasoning
leading to [12, formula (6)]), for A ∈ B(K ), I ∈ B([0,∞)) and B ∈ B(Rd) with
λ (B) = 1,
P
Z(k) ∈ A, R(k) ∈ I
= P
0Nk
(η : Fk
o (η) ∈ A, R(Fko (η),η) ∈ I
)
=1
γ(k)E ∑
F∈X(k)
1A(F − z(F, X))1I(R(F, X))1B(z(F, X)). (1)
In formulating (1), we have used that the intensity γNkof the stationary random
measure Nk is equal to γ(k). This is not immediately obvious, since z(F, X) depends
not only on the face F but also on the process X , and it may have arbitrarily large dis-
tance from F . We prove the equality here by adapting an argument from [13, p. 138].
Let c denote the centre function defined by the centre of the smallest circumscribed

6
ball (as used in [14, pp. 100 ff]). Let Cd0 := [0,1)d be the ‘half-open unit cube’, and
let (zi)i∈N be an enumeration of Zd . Then, using the stationarity of X ,
γNk= E ∑
F∈X(k)
1z(F, X) ∈Cd0
= ∑i∈N
E ∑F∈X(k)
1c(F) ∈Cd0 + zi1z(F, X) ∈Cd
0
= ∑i∈N
E ∑G+zi∈X(k)
1c(G) ∈Cd01z(G+ zi, X) ∈Cd
0
= ∑i∈N
E ∑G∈(X−zi)(k)
1c(G) ∈Cd01z(G, X − zi) ∈Cd
0 − zi
= ∑i∈N
E ∑G∈X(k)
1c(G) ∈Cd01z(G, X) ∈Cd
0 − zi
= E ∑G∈X(k)
1c(G) ∈Cd0= γ(k).
Since the early work of Miles, the use of integral geometric transformations in
stochastic geometry is well established. For the convenience of the reader, we first
state such a transformation formula which is needed below. Its application in this
context goes back to Miles [8] and was repeated in Møller [9] and [14, Sect. 10.2]. If
k ∈ 1, . . . ,d − 1 and f is a nonnegative measurable function on (Rd)d−k+1, then
∫
(Rd)d−k+1f dλ d−k+1 = bd(d−k)((d − k)!)k+1
∫
G(d,d−k)
∫
Rd
∫ ∞
0
∫
SL
. . .∫
SL
f (z+ ru0, . . . ,z+ rud−k)∆k+1d−k (u0, . . . ,ud−k)r
d(d−k)−1
× σL(du0) · · ·σL(dud−k)dr λ (dz)νd−k(dL). (2)
Here ∆d−k(u0, . . . ,ud−k) is the (d − k)-dimensional volume of the convex hull of
u0, . . . ,ud−k. For the value of the constant bd(d−k) we refer to [14, (7.8)]. The transfor-
mation formula is obtained by combining the affine Blaschke–Petkantschin formula
([14, Theorem 7.2.7]) and [14, Theorem 7.3.1], a transformation formula involving
spheres.
We turn to the joint distribution of Z(k) and R(k), for k ∈ 1, . . . ,d − 1, and use
(1) to obtain, for A ∈ B(K ), I ∈ B([0,∞)) and a Borel set B ⊂ Rd with λ (B) = 1,
γ(k)P
Z(k) ∈ A, R(k) ∈ I
= E ∑F∈X(k)
1A(F − z(F, X))1I(R(F, X))1B(z(F, X))

7
=1
(d − k+ 1)!E ∑
(x0,...,xd−k)∈Xd−k+16=
1A
(S(x0, . . . ,xd−k; X)− z(x0, . . . ,xd−k)
)
× 1I
(R(S(x0, . . . ,xd−k; X), X)
)1B(z(x0, . . . ,xd−k)),
where Xm6= denotes the set of ordered m-tuples of pairwise distinct points from X .
(Note that the elements of A are nonempty by definition, so that 1A( /0) = 0.) We use
the Slivnyak–Mecke formula ([14, Cor. 3.2.3]) and then the transformation formula
(2). Since X has intensity measure γλ , this gives
γ(k)P
Z(k) ∈ A, R(k) ∈ I
=γd−k+1
(d− k+ 1)!E
∫
(Rd)d−k+1
1A
(S(x0, . . . ,xd−k; X ∪x0, . . . ,xd−k)− z(x0, . . . ,xd−k)
)
× 1I
(R(S(x0, . . . ,xd−k; X ∪x0, . . . ,xd−k), X ∪x0, . . . ,xd−k)
)
× 1B(z(x0, . . . ,xd−k))λd−k+1(d(x0, . . . ,xd−k))
=bd(d−k)((d − k)!)kγd−k+1
d− k+ 1
∫
G(d,d−k)
∫
Rd
∫ ∞
0
∫
SL
. . .∫
SL
E1A
(S
(z+ ru0, . . . ,z+ rud−k; X ∪
d−k⋃
i=0
z+ rui)− z
)1I(r)1B(z)
× ∆ k+1d−k(u0, . . . ,ud−k)r
d(d−k)−1 σL(du0) · · ·σL(dud−k)dr λ (dz)νd−k(dL).
Now we observe that
S
(z+ ru0, . . . ,z+ rud−k; X ∪
d−k⋃
i=0
z+ rui)− z = S
(ru0, . . . ,rud−k; X − z
)
and that S(ru0, . . . ,rud−k;η), for r > 0 and points u0, . . . ,ud−k ∈ L in general position,
depends only on L,r and η ; we denote it, therefore, by Z(L,r;η). Thus,
Z(L,r;η) =
y ∈ L⊥ : B0
(y,√‖y‖2 + r2
)∩η = /0
(3)

8
for any admissible set η . Since X is stationary, we obtain
γ(k)P
Z(k) ∈ A, R(k) ∈ I
=bd(d−k)((d − k)!)kγd−k+1
d− k+ 1
∫
G(d,d−k)
∫
I
∫
Sd−k+1L
E1A(Z(L,r; X))
× ∆ k+1d−k(u0, . . . ,ud−k)r
d(d−k)−1 σd−k+1L (d(u0, . . . ,ud−k))dr νd−k(dL)
=bd(d−k)((d − k)!)kγd−k+1
d− k+ 1S(d− k,d− k,k+ 1)
×∫
I
∫
G(d,d−k)E1A(Z(L,r; X ))νd−k(dL)rd(d−k)−1 dr,
where [14, Theorem 8.2.3] was used and the number S(d−k,d−k,k+1) is given by
[14, (8.5)]. This constant as well as bd(d−k) can be expressed in terms of κd := λ (Bd)
and ωd := σ(Sd−1) = dκd (also for other dimensions). We state the obtained result
as a theorem.
Theorem 2 For k ∈ 1, . . . ,d−1, the joint distribution of the typical k-face Z(k) and
the typical k-co-radius R(k) of the Poisson–Voronoi tessellation induced by X is given
by
P
Z(k) ∈ A, R(k) ∈ I
=C(d,k)γd−k+1
γ(k)
∫
I
∫
G(d,d−k)P
Z(L,r; X ) ∈ A
νd−k(dL)rd(d−k)−1 dr
for A ∈ B(K ) and I ∈ B([0,∞)), where Z(L,r;η) is defined by (3) and
C(d,k) =1
(d − k+ 1)!ωd−k
d+1ωk+1
κ(d−k)d−2
κ(d−k+1)(d−1).
In particular, for the distribution of the typical k-co-radius we obtain the repre-
sentation
PR(k)(I) = P
R(k) ∈ I
=C(d,k)
γd−k+1
γ(k)
∫
IP
Z(L,r; X) 6= /0
rd(d−k)−1 dr.
Moreover,
P
Z(L,r; X) 6= /0
≥ P
B0(o,r)∩ X = /0
> 0,
and therefore we can also write
P
Z(k) ∈ A, R(k) ∈ I
=
∫
I
∫
G(d,d−k)P
Z(L,r; X ) ∈ A | Z(L,r; X) 6= /0
νd−k(dL)P
R(k)(dr).

9
Hence, the regular conditional distribution of the typical k-face under the hypothesis
R(k) = r is given by
P
Z(k) ∈ A | R(k) = r
=
∫
G(d,d−k)P
Z(L,r; X) ∈ A | Z(L,r; X) 6= /0
νd−k(dL)
for λ1 almost all r > 0. If the Borel set A is invariant under rotations, then
P
Z(k) ∈ A | R(k) = r
= P
Z(L,r; X) ∈ A | Z(L,r; X) 6= /0
,
where L ∈ G(d,d−k) is arbitrary and fixed. A similar remark applies to the statement
of Theorem 2.
3 Induced Poisson processes in subspaces
Theorem 2 expresses, in particular, the distribution of the typical k-face, for k ∈1, . . . ,d − 1, as a mixture of the distributions PZ(L,r; X) ∈ ·. In the present sec-
tion we investigate, therefore, the random set Z(L,r; X ).Let L∈G(d,d−k) and r > 0 be given, for k ∈ 1, . . . ,d−1. As before, η denotes
an admissible point set. For y ∈ L⊥ we have
y ∈ Z(L,r;η) ⇔∀x ∈ η : x /∈ B0
(y,√‖y‖2 + r2
),
and for x ∈ η ,
x ∈ B0
(y,√‖y‖2 + r2
)⇔ ‖x− y‖2 < ‖y‖2 + r2 ⇔ ‖x‖2 − 2〈x,y〉< r2.
We decompose x = x1 + x2 with x1 ∈ L⊥ and x2 ∈ L. For x /∈ L we put
ux :=x1
‖x1‖and τx :=
‖x‖2 − r2
2‖x1‖.
For u ∈ SL⊥ and t ∈ R we define
H(u, t) := w ∈ L⊥ : 〈w,u〉= t, H−(u, t) := w ∈ L⊥ : 〈w,u〉 ≤ t. (4)
With this notation, for x /∈ L we have
x /∈ B0
(y,√
‖y‖2 + r2
)⇔ 〈y,ux〉 ≤ τx ⇔ y ∈ H−(ux,τx).
The stationary Poisson process X satisfies P
X ∩L 6= /0= 0, hence
Z(L,r; X) =⋂
x∈X\L
H−(ux,τx) a.s.

10
Therefore, we define a point process XL,r in SL⊥ ×R by
XL,r := (ux,τx) : x ∈ X \L.
Then Z(L,r; X ) is given by
Z(L,r; X) =⋂
(u,t)∈XL,r
H−(u, t) =: ZL,r. (5)
b
b
b
bb
b
b
b
L
x0
r
r
x1
o
x
x1
y
τxux
SL⊥
ux
L⊥
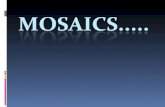
Explanation: The sphere with centre y ∈ L⊥ through the points x0, x1 ∈ L, which are at distance r
from o, contains the point x. The shaded halfspace w ∈ L⊥ : 〈ux,w〉 ≤ τx is the set Z(L,r;x).
The subsequent Theorem 3 shows, in particular, that the intensity measure
EXL,r =: ΘL,r of the process XL,r is locally finite and does not have atoms, hence
XL,r is a.s. simple and thus, by its definition, a Poisson process.
Theorem 3 For k ∈ 1, . . . ,d−1, the intensity measure of the Poisson point process
XL,r is given by
ΘL,r(A) = γωd−krd
∫
SL⊥
∫ ∞
−∞
∫ π/2
01A
(u,
rτ
cosω
)P(τ)
× cosk−1 ω sind−k−1 ω dω dτ σL⊥(du)
for A ∈ B(SL⊥ ×R), where
P(τ) :=
(τ +
√1+ τ2
)d
√1+ τ2
.

11
Proof Let A ∈B(SL⊥ ×R). Let G : Rd \L → SL⊥ ×R be defined by G(x) := (ux,τx).Then
ΘL,r(A) = γ
∫
Rd1A(G(x))λ (dx)
= γ
∫
L⊥
∫
L1A(G(x1 + x2))λL(dx2)λL⊥(dx1).
We introduce polar coordinates in L\ o and in L⊥ \ o, writing
x1 = tu, x2 = sv, t,s > 0, u ∈ SL⊥ , v ∈ SL,
and thus
G(tu+ sv) =
(u,
t2 + s2 − r2
2t
).
Substituting rt for t and rs for s, we get
ΘL,r(A) = γωd−krd
∫
SL⊥
∫ ∞
0
∫ ∞
01A
(u,r
t2 + s2 − 1
2t
)tk−1sd−k−1 dsdt σL⊥(du).
We introduce new coordinates (τ,ω) ∈ R× (0,π/2) by means of the transformation
T : R× (0,π/2)→ (0,∞)2, (τ,ω) 7→ λ (τ,ω)(cosω ,sinω),
where
λ (τ,ω) := τ cosω +√
1+ τ2 cos2 ω .
For fixed ω ∈ (0,π/2), the function τ 7→ λ (τ,ω) is strictly increasing, and we have
limτ→−∞
λ (τ,ω) = 0, limτ→∞
λ (τ,ω) = ∞.
This clearly implies that T is bijective. For the Jacobian JT of T we get
JT (τ,ω) = |det(DT (τ,ω))|= λτ(τ,ω)λ (τ,ω)
with
λτ(τ,ω) :=∂λ
∂τ(τ,ω) =
cosω√1+ τ2 cos2 ω
λ (τ,ω),
hence JT (τ,ω)> 0. Moreover, with (t,s) = T (τ,ω) we have (t2 + s2 −1)/(2t) = τ .
Therefore, the transformation formula applied with the diffeomorphism T yields
∫ ∞
0
∫ ∞
01A
(u,r
t2 + s2 − 1
2t
)tk−1sd−k−1 dsdt
=
∫ ∞
−∞
∫ π/2
01A(u,rτ) [λ (τ,ω)cosω ]k−1 [λ (τ,ω)sinω ]d−k−1
×λτ(τ,ω)λ (τ,ω)dω dτ
=
∫ ∞
−∞
∫ π/2
01A(u,rτ)
λ (τ,ω)d
√1+ τ2 cos2 ω
cosk ω sind−k−1 ω dω dτ.

12
Using Fubini’s theorem twice and substituting τ/cosω for τ , we get
∫ ∞
0
∫ ∞
01A
(u,r
t2 + s2 − 1
2t
)tk−1sd−k−1 dsdt
=
∫ π/2
0
∫ ∞
−∞1A(u,rτ)
(τ cosω +
√1+ τ2 cos2 ω
)d
√1+ τ2 cos2 ω
cosk ω sind−k−1 ω dτ dω
=
∫ π/2
0
∫ ∞
−∞1A
(u,
rτ
cosω
)(
τ +√
1+ τ2)d
√1+ τ2
cosk−1 ω sind−k−1 ω dτ dω
=
∫ ∞
−∞
∫ π/2
01A
(u,
rτ
cosω
)(
τ +√
1+ τ2)d
√1+ τ2
cosk−1 ω sind−k−1 ω dω dτ,
which yields the required equation. ⊓⊔
Remark 1 Let σ0L⊥ := ω−1
k σL⊥ and define the function pr : R→ [0,∞) by
pr(τ) := γωkωd−krd−1∫ π/2
0P(cosω
rτ)
cosk ω sind−k−1 ω dω .
Then the measure µr with
µr(B) :=∫
Bpr(τ)dτ
for B ∈ B(R) satisfies ΘL,r = σ0L⊥ ⊗ µr. Therefore, XL,r is an independently marked
Poisson point process in R with mark space SL⊥ , for which the intensity measure of
the underlying unmarked point process is µr and the mark distribution is σ0L⊥ . This
fact will not be used in the following.
Of the function P appearing in Theorem 3 we shall need the indefinite integral.
We have ∫ x
−∞P(t)dt =
1
dF(x)
with
F(x) =(
x+√
1+ x2)d
,
since F ′(x) = dP(x) and limx→−∞ F(x) = 0. The function F is strictly increasing and
strictly convex.
Remark 2 It is now easy to see that the random set ZL,r defined by (5) is a.s.
bounded, for example, by modifying the proof of [14, Theorem 10.3.2] and using
that∫ ∞−∞ P(t)dt = ∞. From
∫ a−∞ P(t)dt < ∞ for a ∈ R it then follows that ZL,r, if not
empty, is a.s. a polytope.

13
From Theorem 3, we draw a conclusion for the intensity measure ΘL,r evaluated
at special sets. We start with the case k ∈ 1, . . . ,d − 1. The set of convex bodies in
L⊥ is denoted by KL⊥ . For K ∈ KL⊥ let
HK := (u, t) ∈ SL⊥ ×R : K 6⊂ H−(u, t) (6)
and define
ΦL,r(K) :=ΘL,r(HK).
Then, denoting by h(K, ·) the support function of K, we obtain from Theorem 3
ΦL,r(K) = γωd−krd
∫
SL⊥
∫ ∞
−∞
∫ π/2
01HK
(u,
rt
cosω
)P(t)
× cosk−1 ω sind−k−1 ω dω dt σL⊥(du)
= γωd−krd
∫
SL⊥
∫ π/2
0
∫ ∞
−∞1 rt
cosω< h(K,u)
P(t)dt
× cosk−1 ω sind−k−1 ω dω σL⊥(du).
We have ∫ ∞
−∞1 rt
cosω< h(K,u)
P(t)dt =
1
dF
(cosω
rh(K,u)
)
and hence
ΦL,r(K) =γωd−k
drd
∫ π/2
0
[∫
SL⊥
F
(cosω
rh(K,u)
)σL⊥(du)
](7)
× cosk−1 ω sind−k−1 ω dω .
This will be needed in the next section.
Remark 3 The obtained results allow us to compute the probability that the typical k-
face contains its generalized nucleus. From Theorem 2 we get, with a fixed subspace
L ∈ G(d,d− k),
P
o ∈ Z(k)
=C(d,k)
γd−k+1
γ(k)
∫ ∞
0P
o ∈ Z(L,r; X)
rd(d−k)−1 dr,
and here
P
o ∈ Z(L,r; X)
=P
XL,r(Ho) = 0
= exp
[−ΘL,r(Ho)
]= exp [−ΦL,r(o)] .
Together with (7) and F(0) = 1 this leads to
P
o ∈ Z(k)
=
1
(d − k+ 1)(d− k)d
(ωd+1
κd
)d−k
ωk+1
κ(d−k)d−2
κ(d−k+1)(d−1)
γ
γ(k).
For example, for d = 2 we have Po ∈ Z(1) = 2/3, and for d = 3 we obtain that
Po ∈ Z(1)= 105/192≈ 0.5469 and Po ∈ Z(2)= 140/(35+ 24π2)≈ 0.5151.

14
We add a few remarks concerning the case k= d. Here we have L= o, L⊥ =Rd ,
and
Z(o,0; X) := y ∈ Rd : B0(y,‖y‖)∩ X = /0
P-a.s. is the Voronoi cell of X ∪o with nucleus o. Then, again P-a.s., we have
Z(o,0; X) =⋂
x∈X\oH−(
x
‖x‖ ,‖x‖2
)=: Zo,0 = Z(d).
Here and in the following, definitions and results in the case k = d often correspond
to definitions and results in the cases where k ∈ 1, . . . ,d − 1 if we choose r = 0.
The simple point process
Xo,0 :=
(x
‖x‖ ,‖x‖2
): x ∈ X \ o
is a Poisson point process in Sd−1 × (0,∞) ⊂ Sd−1 × R with intensity measure
Θo,0 := EXo,0. For a convex body K ∈ K with o ∈ K we define
HK := (u, t) ∈ Sd−1 × (0,∞) : K 6⊂ H−(u, t).
Then, as in [5, Section 2], we get
Φo,0(K) :=Θo,0(HK) = 2dγU(K)
with
U(K) :=1
d
∫
Sd−1h(K,u)d σ(du). (8)
4 Typical faces with large inradius
The purpose of this section is to prove Theorem 1. The conditional probability appear-
ing in that theorem can now, thanks to the representation of the distribution of Z(k)
that we have obtained, be expressed in a form allowing further conclusions. Let ρ ≥ 1
and 0 < ε ≤ 1 be given. Further, let k ∈ 1, . . . ,d. We fix a subspace L ∈ G(d,d−k)and denote by
BL⊥ := Bd ∩L⊥
its unit ball. By Theorem 2 and rotation invariance we have
P
R(k)m ≥ ρ
= P
Rm(Z
(k))≥ ρ
= C(d,k)γd−k+1
γ(k)
∫ ∞
0PρBL⊥ ⊂ ZL,rrd(d−k)−1 dr
= C(d,k)γd−k+1
γ(k)
∫ ∞
0exp [−ΦL,r(ρBL⊥)] r
d(d−k)−1 dr.

15
Similarly,
P
R(k)m ≥ ρ , R
(k)M > ρ + s
= P
Rm(Z
(k))≥ ρ , RM(Z(k))> ρ + s
=C(d,k)γd−k+1
γ(k)
∫ ∞
0PρBL⊥ ⊂ ZL,r 6⊂ (ρ + s)BL⊥rd(d−k)−1 dr
and hence
P
R(k)M > ρ + s | R
(k)m ≥ ρ
=
∫ ∞0 PρBL⊥ ⊂ ZL,r 6⊂ (ρ + s)BL⊥rd(d−k)−1 dr
∫ ∞0 exp [−ΦL,r(ρBL⊥)]r
d(d−k)−1 dr. (9)
To estimate (9) from above, we first fix the number r, with r > 0 if k ≤ d−1, and
r = 0 if k = d (in this case the integration is omitted). We work in the k-dimensional
subspace L⊥ as basic space. Recall that H−(u, t), defined by (4), is a closed halfspace
in L⊥ and that
ZL,r =⋂
(u,t)∈XL,r
H−(u, t)
is a random closed convex set in L⊥ (possibly empty).
Put ‖K‖ := max‖x‖ : x ∈ K for K ∈KL⊥ . For ρ ≥ 1, s > 0 and m ∈N we define
Kρ ,s(m) := K ∈ KL⊥ : ρBL⊥ ⊂ K 6⊂ (ρ + s)BL⊥ , ‖K‖ ∈ ρ(m,m+ 1]
and
qρ ,s(m) := PZL,r ∈ Kρ ,s(m).Then we have
PρBL⊥ ⊂ ZL,r 6⊂ (ρ + s)BL⊥= ∑m∈N
qρ ,s(m). (10)
The reason for decomposing in this way (and thus for introducing the parameter m)
lies in the fact that it allows us to exploit a fundamental property of Poisson processes
([14, Th. 3.2.2(b)]), permitting a reduction to a finite number N of independent, iden-
tically distributed objects, in the following way.
Let
Cρ ,m := ρ(m+ 1)BL⊥.
If N ≤ k, then P
ZL,r ∈ Kρ ,s(m), XL,r(HCρ,m) = N
= 0. Hence, we have (using the
notation (6))
qρ ,s(m) =∞
∑N=k+1
PXL,r(HCρ,m ) = NpN
with
pN := PZL,r ∈ Kρ ,s(m) | XL,r(HCρ,m ) = N

16
and
PXL,r(HCρ,m ) = N=ΘL,r(HCρ,m )
N
N!exp[−ΘL,r(HCρ,m)
],
since XL,r is a Poisson process. For (u1, t1), . . . ,(uN , tN) ∈ SL⊥ ×R we use the abbre-
viation
P((u, t)(N)) :=N⋂
i=1
H−(ui, ti).
Then we have, by the Poisson property ([14, Th. 3.2.2(b)]) mentioned above,
pN =1
ΦL,r(Cρ ,m)N
∫
H NCρ,m
1P((u, t)(N)) ∈ Kρ ,s(m)Θ NL,r(d((u1, t1), . . . ,(uN , tN))).
We need an upper estimate for (10), hence for qρ ,s(m) and, therefore, for pN .
For sufficiently large m, this estimate is provided in Lemma 1 and based on the fact
that P((u, t)(N)) ∈ Kρ ,s(m) implies for m large that the intersection P((u, t)(N)) con-
tains a long segment with one endpoint at o, which happens with small probabil-
ity. In the course of the proof of Lemma 1, we first obtain an estimate in terms of
ΦL,r(Kρ ,m), for certain convex bodies Kρ ,m. The estimation of ΦL,r(Kρ ,m) then makes
use of the distributional results obtained in the previous sections, in particular of (7).
Since qρ ,s(m)≤ qρ ,0(m), we need only the case s = 0 in Lemma 1. The estimation for
small numbers m, in Lemma 3, requires an estimate for the increase of the functional
ΦL,r when passing from a ball with centre o to the convex hull of this ball and a point
outside; this is provided by Lemma 2.
In this paper, c1,c2, . . . denote constants depending only on the dimension d and
possibly on a lower bound γ0 > 0 for the intensity γ . We use repeatedly that a constant
depending on k ∈ 1, . . . ,d can be estimated by a constant depending only on d.
Lemma 1 There exists a number m0, depending only on d, such that
qρ ,0(m)≤ c3 exp [−ΦL,r(ρBL⊥)]exp[−c4γmdρd
]
for m ≥ m0 and ρ ≥ 1.
Proof Suppose that (u1, t1), . . . ,(uN , tN) ∈ HCρ,m are such that P := P((u, t)(N)) ∈Kρ ,0(m). Then P has a vertex v with ‖v‖ ≥ ρm. This vertex is the intersection of k
facets of P. Hence, there exists an index set J ⊂ 1, . . . ,N with k elements such that
v=⋂
j∈J
H(u j, t j).
We denote the segment [o,v] by S = S((u j, t j), j ∈ J) and its length by |S|. The seg-
ment S satisfies
S ⊂ H−(ui, ti) for i ∈ 1, . . . ,N.Since S ⊂Cρ ,m, we have
∫
HCρ,m
1S ⊂ H−(u, t)ΘL,r(d(u, t)) = ΦL,r(Cρ ,m)−ΦL,r(S)
≤ ΦL,r(Cρ ,m)−ΦL,r(Sρm),

17
where we have denoted by Sρm a fixed segment in L⊥ with endpoints o and ρme,
‖e‖= 1, and we have used that ΦL,r is invariant under rotations of L⊥ in itself and is
increasing under set inclusion. We obtain
pN ≤(
N
k
)ΦL,r(Cρ ,m)
−N
∫
H kCρ,m
1∣∣S((u j, t j), j ∈ 1, . . . ,k)
∣∣ ≥ ρm
×∫
HN−k
Cρ,m
1
S((u j, t j), j ∈ 1, . . . ,k)⊂ H−(ui, ti) for i = k+ 1, . . . ,N
×Θ N−kL,r (d((uk+1, tk+1), . . . ,(uN , tN)))Θ k
L,r(d((u1, t1), . . . ,(uk, tk)))
≤(
N
k
)ΦL,r(Cρ ,m)
−N
∫
H kCρ,m
[ΦL,r(Cρ ,m)−ΦL,r(Sρm)]N−k
×Θ kL,r(d((u1, t1), . . . ,(uk, tk)))
=
(N
k
)ΦL,r(Cρ ,m)
k−N[ΦL,r(Cρ ,m)−ΦL,r(Sρm)
]N−k.
This yields
qρ ,0(m) ≤∞
∑N=k+1
[ΦL,r(Cρ ,m)]N
N!exp[−ΦL,r(Cρ ,m)
]
×(
N
k
)ΦL,r(Cρ ,m)
k−N[ΦL,r(Cρ ,m)−ΦL,r(Sρm)
]N−k
=1
k![ΦL,r(Cρ ,m)]
k exp[−ΦL,r(Cρ ,m)
]
×∞
∑N=k+1
1
(N − k)!
[ΦL,r(Cρ ,m)−ΦL,r(Sρm)
]N−k
≤ 1
k![ΦL,r(Cρ ,m)]
k exp[−ΦL,r(Sρm)
]. (11)
Let k ∈ 1, . . . ,d− 1. Since F is convex, Jensen’s inequality leads from (7) to
ΦL,r(Sρm) =γωd−k
drd
∫ π/2
0
[∫
SL⊥
F(cosω
rρm〈e,u〉+
)σL⊥(du)
]
× cosk−1 ω sind−k−1 ω dω
≥ γωd−kωk
drd
∫ π/2
0F
(1
ωk
∫
SL⊥
cosω
rρm〈e,u〉+σL⊥(du)
)
× cosk−1 ω sind−k−1 ω dω ,

18
hence
ΦL,r(Sρm)≥γωd−kωk
drd
∫ π/2
0F(cosω
rρmc(k)
)cosk−1 ω sind−k−1 ω dω
with a constant c(k) depending only on k. For x ≥ 0 and a ≥ 1 we have
rdF(
ax
r
)=
(ax+
√r2 +(ax)2
)d
=d
∑j=0
(d
j
)(ax)d− j(r2 +(ax)2) j/2
≥ (ad − 1)xd + xd + d[(ad−1 − 1)xd−1 + xd−1](r2 + x2)12
+d
∑j=2
(d
j
)xd− j(r2 + x2) j/2
≥ rdF(x
r
)+(ad − 1)xd + d(ad−1− 1)xd−1r.
Inserting this with x = ρ cosω and a= mc(k), we conclude that there exists a number
m0, depending only on d, such that for m ≥ m0 we have
ΦL,r(Sρm)≥ ΦL,r(ρBL⊥)+ γ[c5mdρd + c6md−1ρd−1r
].
This inequality is also true, by a simpler direct estimate based on the functional U
from (8), if k = d and r = 0. Together with (11) this gives
qρ ,0(m) ≤ 1
k!
[ΦL,r(Cρ ,m)
]kexp [−ΦL,r(ρBL⊥)]
×exp[−c6γmd−1ρd−1r
]exp[−c5γmdρd
]
for k ∈ 1, . . . ,d. We need an upper estimate for ΦL,r(Cρ ,m). Again we first consider
the case k ∈ 1, . . . ,d − 1. Using F(x)≤ (1+ 2x)d for x ≥ 0, we get
ΦL,r(Cρ ,m) = ΦL,r(ρ(m+ 1)BL⊥)
=γωd−kωk
drd
∫ π/2
0F(cosω
rρ(m+ 1)
)cosk−1 ω sind−k−1 ω dω
≤ γωd−kωk
d
∫ π/2
0(r+ 2ρ(m+ 1)cosω)d cosk−1 ω sind−k−1 ω dω
=γωd−kωk
d
d
∑j=0
(d
j
)2 j(m+ 1) jρ jrd− j
Γ(
j+k2
)Γ(
d−k2
)
Γ(
d+ j2
)
and hence
ΦL,r(Cρ ,m)≤ c7γd
∑j=0
m jρ jrd− j. (12)

19
This estimate is also true for k = d and r = 0, again by a simple direct argument.
From this, we obtain
[ΦL,r(Cρ ,m)]k exp
[−c6γmd−1ρd−1r
]exp[−(c5/2)γmdρd
]
≤[
c7γd
∑j=0
m jρ jrd− j
]k
exp[−c6γmd−1ρd−1r
]exp[−(c5/2)γmdρd
]
≤((
c7γmdρd)k
exp[−(c5/2)γmdρd
])(
d
∑j=0
rd− j
)k
exp [−c6γ0r]
,
since m ≥ 1, ρ ≥ 1, γ ≥ γ0 > 0 and r > 0 if k ∈ 1, . . . ,d − 1 (respectively, r = 0 if
k = d). The right-hand side attains a maximum, which depends only on d and a lower
bound γ0 for γ . This yields the assertion of the lemma. ⊓⊔
Remark 4 Similar arguments as above show that PR(k)m ≥ ρ→ 0 exponentially fast
as ρ → ∞. In fact, from
rdF(ρ
rcosω
)≥ rd +ρd cosd ω
we get
ΦL,r(ρBL⊥)≥ γ(a1rd + a2ρd)
with constants a1,a2 depending only on d. Hence we deduce that
P
R(k)m ≥ ρ
≤ a3
γ
γ(k)exp(−γa2ρd
),
with a constant a3 depending only on d.
For x ∈ L⊥ \ρBL⊥ we have ΦL,r(conv(ρBL⊥ ∪x))>ΦL,r(ρBL⊥), by the mono-
tonicity of ΦL,r. For our estimation of qρ ,s(m) for m ≤ m0 in Lemma 3 we need
a careful improvement of this inequality in terms of ‖x‖− ρ . This is provided by
Lemma 2.
Lemma 2 Let ρ ≥ 1 and 0 ≤ ε ≤ 1. If x ∈ L⊥ satisfies ‖x‖ ≥ (1+ ε)ρ , then
ΦL,r(conv(ρBL⊥ ∪x))≥ ΦL,r(ρBL⊥)+ γg(ρ ,r)εk+1
2
with
g(ρ ,r) = maxc8ρd ,c9ρrd−1,
where c8,c9 are suitable constants depending only on d.

20
Proof We may assume that x = (1+ ε)ρe with e ∈ L⊥, ‖e‖= 1 and ε > 0.
Let k ∈ 1, . . . ,d − 1. By (7),
Ψ(ε) := ΦL,r(conv(ρBL⊥ ∪x))−ΦL,r(ρBL⊥)
=γωd−k
drd
∫ π/2
0
∫
SL⊥
[F(cosω
rh(conv(ρBL⊥ ∪x),u)
)−F
(cosω
rρ)]
× σL⊥(du)cosk−1 ω sind−k−1 ω dω .
First, we consider the cases where k ∈ 2, . . . ,d − 1. Decomposing u ∈ SL⊥ in the
form u = te+√
1− t2 u0 with u0 ∈ SL⊥ ∩ e⊥, we get
Ψ (ε) =γωd−kωk−1
drd
∫ π/2
0
∫ 1
11+ε
[F
(cosω
r(1+ ε)ρt
)−F
(cosω
rρ)]
× (1− t2)k−3
2 dt cosk−1 ω sind−k−1 ω dω .
We write
f (ε) :=
∫ 1
11+ε
[F
(cosω
r(1+ ε)ρt
)−F
(cosω
rρ)]
(1− t2)k−3
2 dt.
Observing that the integrand vanishes at the lower boundary of the integration inter-
val, we obtain
f ′(ε) = d
∫ 1
11+ε
P(cosω
r(1+ ε)ρt
) cosω
rρt(1− t2)
k−32 dt. (13)
Next we use the estimate P(x)> (2x)d−1 for x ≥ 0. This gives
f ′(ε) ≥ d2d−1(cosω
rρ)d∫ 1
11+ε
td(1− t2)k−3
2 dt.
The substitution 1− t2 = τ leads to
∫ 1
11+ε
td(1− t2)k−3
2 dt =1
2
∫ ε(2+ε)
(1+ε)2
0τ
k−32 (1− τ)
d−12 dτ.
For 0 ≤ y ≤ 1, a > 0 and b ≥ 1 we can estimate∫ y
0ta−1(1− t)b−1dt ≥ c(a,b)ya.
In fact, for 0 ≤ y ≤ 1/2 we have 1− t ≥ 1/2 in the integrand and, therefore,
∫ y
0ta−1(1− t)b−1dt ≥ 1
2b−1
∫ y
0ta−1dt =
1
a2b−1ya.
For 1/2 ≤ y ≤ 1 trivially
∫ y
0ta−1(1− t)b−1dt ≥
∫ 1/2
0ta−1(1− t)b−1dt = c′(a,b) ·1 ≥ c′(a,b)ya.

21
Therefore, we obtain
∫ 1
11+ε
td(1− t2)k−3
2 dt ≥ c10
(ε(2+ ε)
(1+ ε)2
) k−12
≥ c10
(3
4ε
) k−12
≥ c11εk−1
2 .
We conclude that
Ψ ′(ε)≥ c12γρdεk−1
2 = g′(ε)
with g(ε) := c12γρd 2k+1
εk+1
2 . From (Ψ −g)′(ε)≥ 0 for 0≤ ε ≤ 1 and (Ψ −g)(0) = 0
we obtain Ψ − g ≥ 0, which gives
Ψ (ε)≥ c13γρdεk+1
2 .
We start again from (13), but now we use the estimate P(x)≥ 1 for x ≥ 0. In the
same way as before, this leads to the estimate
Ψ(ε) ≥ c14γρrd−1εk+1
2 .
Both estimates together yield the assertion if k ∈ 2, . . . ,d− 1.
If k = 1, then
Ψ(ε) =γωd−1
drd
∫ π/2
0
[F(cosω
r(1+ ε)ρ
)−F
(cosω
rρ)]
sind−2 ω dω
and hence
Ψ ′(ε) = γωd−1rd
∫ π/2
0P
(cosω
r(1+ ε)ρ
) cosω
rρ sind−2 ω dω .
Now the proof can be completed by estimating P as before.
Finally, the same conclusion is obtained for k = d with a simplified argument. ⊓⊔
Lemma 3 If s = ερ with 0 ≤ ε ≤ 1, then
qρ ,s(m)≤ 1
k![ΦL,r(Cρ ,m)]
k exp[−ΦL,r(ρBL⊥)− γg(ρ ,r)ε
k+12
].
Proof Suppose that (u1, t1), . . . ,(uN , tN) ∈ HCρ,m are such that P := P((u, t)(N)) ∈Kρ ,s(m). Then P has a vertex x with ‖x‖ ≥ ρ + s = ρ(1+ ε). This vertex is the
intersection of k facets of P. Hence, there exists an index set J ⊂ 1, . . . ,N with k
elements such that
x=⋂
j∈J
H(u j, t j).
By Lemma 2,
∫
HCρ,m
1conv(ρBL⊥ ∪x)⊂ H−(u, t)ΘL,r(d(u, t))
≤ ΦL,r(Cρ ,m)−ΦL,r(ρBL⊥)− γg(ρ ,r)εk+1
2 .

22
We write x = x((u1, t1), . . . ,(uk, tk)) and obtain
PZL,r ∈ Kρ ,s(m) | XL,r(HCρ,m) = N
≤(
N
k
)ΦL,r(Cρ ,m)
−N
∫
H kCρ,m
1‖x((u1, t1), . . . ,(uk, tk))‖ ≥ ρ(1+ ε)
∫
HN−k
Cρ,m
1conv(ρBL⊥ ∪x((u1, t1), . . . ,(uk, tk)))⊂ H(ui, ti), i = k+ 1, . . . ,N
×Θ N−kL,r (d((uk+1, tk+1), . . . ,(uN , tN)))Θ k
L,r(d((u1, t1), . . . ,(uk, tk)))
≤(
N
k
)ΦL,r(Cρ ,m)
k−N[ΦL,r(Cρ ,m)−ΦL,r(ρBL⊥)− γg(ρ ,r)ε
k+12
]N−k
.
As before, summation over N gives the assertion. ⊓⊔
Proof of Theorem 1. We have to estimate the conditional probability given by (9).
Using Lemma 3 for m ≤ m0 and Lemma 1 for m > m0 and putting s = ερ , we get
PρBL⊥ ⊂ ZL,r 6⊂ (ρ + s)BL⊥= ∑m∈N
qρ ,s(m)≤ A(ρ ,r,ε)+B(ρ ,r)
with
A(ρ ,r,ε) :=m0
∑m=1
1
k![ΦL,r(Cρ ,m)]
k exp[−ΦL,r(ρBL⊥)− γg(ρ ,r)ε
k+12
]
and
B(ρ ,r) := ∑m>m0
c3 exp [−ΦL,r(ρBL⊥)]exp[−c4γmdρd
].
The sum
∑m>m0
exp[−c4γ(md − 1)ρd
]
is convergent and bounded by a constant depending only on d and γ0 (the lower bound
for γ introduced before Lemma 1), since ρ ≥ 1. We conclude that
B(ρ ,r)≤ c15 exp [−ΦL,r(ρBL⊥)]exp[−c4γρd
].
Before the estimation of A(ρ ,r,ε), we specify ε , choosing
ε = ρ−(1+β ), s = ερ = ρ−β , 0 < β <2d− k− 1
k+ 1;
then
α := d− (1+β )k+ 1
2> 0
and, by the definition of g(ρ ,r),
g(ρ ,r)εk+1
2 ≥ c8ρdεk+1
2 = c8ρα

23
and
g(ρ ,r)εk+1
2 ≥ c9ρrd−1εk+1
2 = c9ρα
(r
ρ
)d−1
.
From (12) we get
m0
∑m=1
1
k!
[ΦL,r(Cρ ,m)
]kexp
[−1
2γg(ρ ,r)ε
k+12
]
≤m0
∑m=1
1
k!
[c7γ
d
∑j=0
m jρ jrd− j
]k
exp
[−1
2γg(ρ ,r)ε
k+12
]
≤ c16
[γ
d
∑j=0
ρd
(r
ρ
)d− j]k
exp
[−1
2γρα max
c8,c9
(r
ρ
)d−1]
≤ c16
((γρα)k exp
[−c8
6γρα
])(ρ (d−α)k exp
[−c8
6γ0ρα
])
×(
d
∑j=0
(r
ρ
)d− j)k
exp
[−c9
6γ0
(r
ρ
)d−1]≤ c17.
The rearrangements in the second to last estimate show that all bounds depend only
on d and on the lower bound γ0 for γ .
We conclude that
A(ρ ,r,ε)≤ c17 exp [−ΦL,r(ρBL⊥)]exp
[−1
2c8γρα
].
It follows that
PρBL⊥ ⊂ ZL,r 6⊂ (ρ + s)BL⊥
≤ exp [−ΦL,r(ρBL⊥)]
(c17 exp
[−1
2c8γρα
]+ c15 exp
[−c4γρd
])
≤ exp [−ΦL,r(ρBL⊥)]c18 exp [−c19γρα ] . (14)
From (9) we now deduce that
P
R(k)M > ρ +ρ−β | R
(k)m ≥ ρ
≤ c18 exp [−c19γρα ] .
For k = d we have
PR(d)m ≥ ρ= exp
[−Φo,0(ρBd)
]
and (14) remains true with L = o and r = 0, by a simpler argument. This concludes
the proof in all cases. ⊓⊔
Acknowledgements We thank the referee for a suggestion that led to a simplification of the proof of
Theorem 3.

24
References
1. Baumstark, V., Last, G.: Some distributional results for Poisson–Voronoi tessellations. Adv. in Appl.
Probab. (SGSA) 39, 16–40 (2007)
2. Calka, P.: The distributions of the smallest disks containing the Poisson–Voronoi typical cell and the
Crofton cell in the plane. Adv. in Appl. Probab. (SGSA) 34, 702–717 (2002)
3. Calka, P., Schreiber, T.: Limit theorems for the typical Poisson–Voronoi cell and the Crofton cell with
a large inradius. Ann. Probab. 33, 1625–1642 (2005)
4. Calka, P., Schreiber, T.: Large deviation probabilities for the number of vertices of random polytopes
in the ball. Adv. in Appl. Probab. (SGSA) 38, 47–58 (2006)
5. Hug, D., Reitzner, M., Schneider, R.: Large Poisson–Voronoi cells and Crofton cells. Adv. in Appl.
Probab. (SGSA) 36, 667–690 (2004)
6. Hug, D., Schneider, R.: Asymptotic shapes of large cells in random tessellations. Geom. Funct. Anal.
17, 156–191 (2007)
7. Hug, D., Schneider, R.: Large faces in Poisson hyperplane mosaics. Ann. Probab. (to appear)
8. Miles, R.E.: Sectional Voronoi tessellations. Rev. Un. Mat. Argentina 29, 310–327 (1984)
9. Møller, J.: Random tessellations in Rd . Adv. in Appl. Probab. 21, 37–73 (1989)
10. Møller, J.: Lectures on Random Voronoi Tessellations. Lecture Notes in Statist. 87, Springer, New
York (1994)
11. Okabe, A., Boots, B., Sugihara, K., Chiu, S.N.: Spatial Tessellations; Concepts and Applications of
Voronoi Diagrams. 2nd ed., Wiley, Chichester (2000)
12. Schneider, R.: Weighted faces of Poisson hyperplane tessellations. Adv. in Appl. Probab. (SGSA) 41,
682–694 (2009)
13. Schneider, R., Weil, W.: Stochastische Geometrie. Teubner, Stuttgart, Leipzig (2000)
14. Schneider, R., Weil, W.: Stochastic and Integral Geometry. Springer, Berlin, Heidelberg (2008)
15. Stoyan, D., Kendall, W.S., Mecke, J.: Stochastic Geometry and its Applications. 2nd ed., Wiley,
Chichester (1995)


















