Building small robot legs with pre-fabricated components is difficult...
Upload
milo-stevensonCategory
view
214download
0
9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
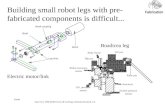
FabricationBuilding small robot legs with pre-fabricated components is difficult...
Motor
Leg links
Shaft
Shaft coupling
Body frame Lift pot
Knee pot
Hip pot
Abduct pressuresensor
Lift pressuresensor Extend pressure
sensor
Gears
Actuators
Boadicea leg
Electric motor/link

IV. Fabrication and integration experiments2:00-2:30pm (*Cutkosky, Kenny, Howe)
• Overview of SDM fabrication process, capabilities, challenges
• Autonomous robots: experiments with UCB, SRI, (others?)
• Cooperative robots: experiments with Harvard, Johns Hopkins, UCB

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication Concept design for a biomimetic “Insect-Leg”
A prototype design of the same leg employing three-dimensional plastic “exoskeleton” surrounding with embedded actuators, sensor and cooling system.

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication
Mechanics and muscle activation patterns (R. Full)
Three-dimensional musculo-skeletal model of the leg of B. discoidalis constructed by Full’s lab. Simulations such as these help characterize the role of individual muscles in locomotion.

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationShape Deposition Manufacturing(SU/CMU)
• sensors • electronics
Shape
e.g., microcasting
(contouring)
e.g., Shot Peen
Deposit
e.g., CNC machining
(planing)
Embed
Stress Reliefe.g., thermocouple
stainless steel
sacrificial copper
internal copper
• CNC milling • CNC EDM • grinding
• microcast • gelcasting • 2-part mixtures • laser cladding • UV curing • plasma spraying • deposition welding • extrusion
• shot-peening • vibratory • preheating

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationSDM allows finished parts to be inserted at any point in the cycle
First layer part & support Second layer part & support
Insert bearings and second link Insert a sub-part
Final part deposition After support removal
Green link and red bearings are added as finished components

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationSDM capabilities
• Slides and web pages of parts that would be difficult or impossible to create using conventional manufacturing methods– Topology that would be almost impossible with
conventional machining tilted frame (CMU/Stanford)
– Integrated assembly of polymers with embedded electronics and interconnects (CMU Frog Man)
– other example parts from RPL at Stanford

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationFrogman (CMU)
• Example of polymer component with embedded electronics using shape deposition manufacturing

MicroStructures and Sensors Lab (MSSL)
Research on Fundamental Properties and Applications of MEMS-based MicroMechanical Devices.
• Micromechanical Sensors.
• Micromechanical Elements for Scientific and Technological Collaboration Partners.
• Devices and Instruments for Studies of Fundamental Properties of Micromechanical Structures.
Collaborators : IBM, JPL, NRL, SNL, SAIC, Medtronic, Raychem, Lucas, Seagate, Perkin-Elmer...
Students from :ME, EE, Appl Phys, A/A
2-Axis AFM Cantilevers for Surface Friction Experiments and Thermomechanical Data Storage
Piezoresistive Lateral Accelerometer
Flow Visualization in Microchannels
Ultrathin Cantilevers for attoNewton Force Detection
Kenny

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication
Epoxyacrylic
Shape Memory Alloy wire withwater cooling channels
Embedded SMA actuators
• Intial experiments with epoxy and urethane polymers and various sacrificial supportmaterials have underscored the need to
build in disposable fixtures for proper alignment.

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationEmbedded sensor example: pressure sensor unit for pneumatic actuators
Screen shot from SDM CAD environment: several steps in the “building block” design/fabrication sequence for the embedded pressure sensor package
PC board CAD file for commercial MEMS pressure transducer & instrumentation

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationEmbedded sensor example (continued)
Completed pressure sensor unit ready for connection to a pneumatic actuator.
A batch of four parts during the final machining step. Part material is urethane (yellow). Sacrificial support material is wax (red), filling cavities and encasing the circuit leads to protect them.
Fabrication instructions archived at http://cdr.stanford.edu/dml/biomimetics/documents.html

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationApproaches to design with layered shape
manufacturingUsually people think of taking a finished CAD
model and submitting it for decomposition and
manufacture
Example: the slider-crank mechanism, an “integrated assembly” built by SDM

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationSDM process planning: geometric decomposition for tool access
Cross section of part material (gray) in support material
buil
d di
rect
ion

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA 15
FabricationDecomposition into ‘compacts” and layers
• Several levels of decomposition are required
CompletePart
Compacts Layers Tool Path

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationTesting for compactness
Build Axis
OKNot a
compact
~
p
d
dZ ZS S
0 02
2
There exists no point, p, on S which is an inflection point with an undercut surface above an upward-facing surface.
Z

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationLayers produced by automatic decomposer for slider crank mechanism
Gray = steel, brown = copper support material

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationLayered shape deposition - potential manufacturing problems
How mechanisms are built After support removal
• finite thickness of support material
• poor finish on un-machined surfaces
• warping and internal stresses

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationSlider crank can be built entirely from two kinds of primitives
Yellow = part material, blue = support material

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationMerge algorithm for compacts (Binnard)
12
3
12
3Combine thesetwo compact lists
34
5
3
5
24 4
6To form thisresult list
Source lists after subtraction A B
C list(Intersections)
Source compactsa b
1 1
2
3
1
1324
32
2
33
f (a,b )

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
FabricationBuilding Designs from Primitives• Here is the result of building slider-crank from
primitives• allows manufacturability analysis at design time

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication
SFF Object made up of Part and Support Compacts
What gets sent to the Manufacturing Service
Primitives + Merging Rules
The Final Geometry
What the Designer works with
Building a robot joint from a library of shapes

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication
Link 1 Link 2
Pneumatic Actuator Magnetic Gear Tooth Sensor
Design for a prototype pneumatic knee joint built from primitives (M. Binnard)

9/6/98Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication
Decomposed Features
SFF-MEMS VLSIBoxes, Circles, Polygons and Wires
SFF-MEMS Design Rules Mead-Conway Design Rules
Wc/ >= 2
Minimum gap/rib thickness
d d
d
(top view)a)
Generalized 3D gap/rib
d
(side view)b)
d
Minimum feature thickness
d(m1,m2,m3)
(side view)e)
m1 m2 m3
d(m1,m2,m3,)
m1 m2 m3
Comparison with VLSI approach