External Memory Algorithms Kamesh Munagala. External Memory Model Aggrawal and Vitter, 1988.
69
External Memory Algorithms Kamesh Munagala
-
date post
21-Dec-2015 -
Category
Documents
-
view
221 -
download
1
Transcript of External Memory Algorithms Kamesh Munagala. External Memory Model Aggrawal and Vitter, 1988.

External Memory Algorithms
Kamesh Munagala

External Memory Model
Aggrawal and Vitter, 1988

Typical Memory Hierarchy
CPU L1 L2 Main Memory
Disk

Simplified Hierarchy
CPUMain
Memory
Disk
• Disk access is slow• CPU speed and main memory access is really fast
• Goal: Minimize disk seeks performed by algorithm

Disk Seek Model
Block 1 Block 2 Block 3 Block 4
• Disk divided into contiguous blocks
• Each block stores B objects (integers, vertices,….)
• Accessing one disk block is one seek
Time = 1Time = 3Time = 2

Complete Model Specification• Data resides on some N disk blocks
• Implies N * B data elements!
• Computation can be performed only on data in main memory
• Main memory can store M blocks• Data size much larger than main memory
size• N M: interesting case

Typical Numbers Block Size: B = 1000 bytes
Memory Size: M = 1000 blocks
Problem Size: N = 10,00,000 blocks

Upper Bounds for Sorting
John von Neumann, 1945

Merge Sort Iteratively create large sorted
groups and merge them
Step 1: Create N/(M –1) sorted groups of size (M – 1) blocks each

Merge Sort: Step 1
B = 2; M = 3; N = 8 N/(M –1) = 4
1 2 4 2
1 2 2 4
1 2 4 2 9 1 5 3 8 0 3 2 8 0 5 2
Main Memory

Merge Sort: Step 1
9 1 5 3
1 2 2 4 1 3 5 9
1 2 4 2 9 1 5 3 8 0 3 2 8 0 5 2

End of Step 1
N/(M-1) = 4 sorted groups of size (M-1) = 2 each
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 2 4 2 9 1 5 3 8 0 3 2 8 0 5 2
One Scan
Merging Steps Merge (M-1) sorted groups into one
sorted group
Iterate until all groups merged

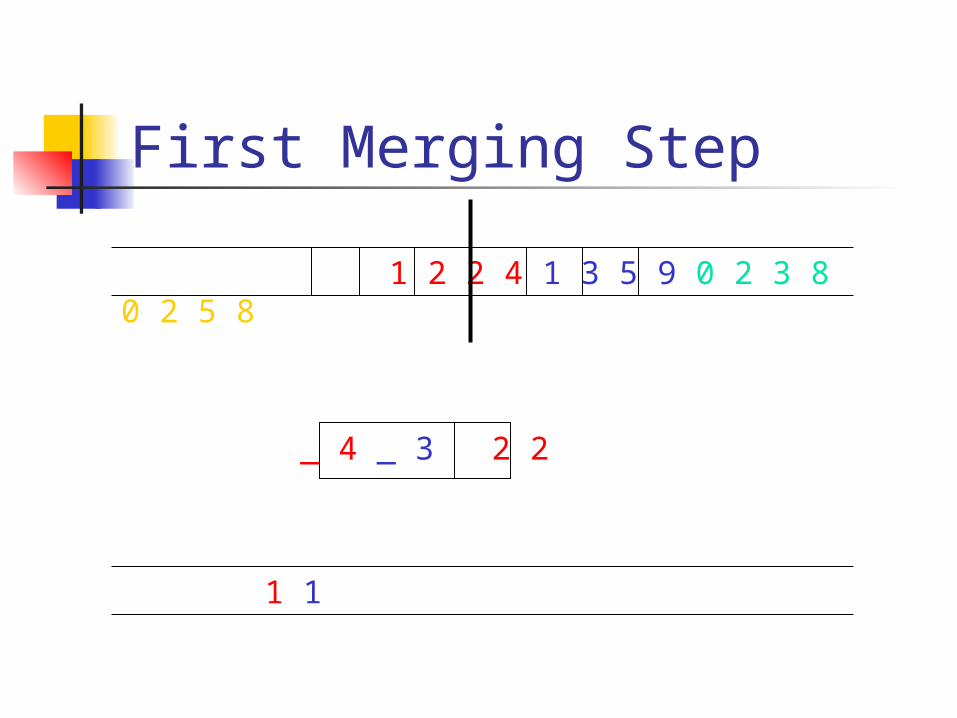
First Merging Step
1 2 1 3
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
N = 8M-1 = 2

First Merging Step
_ 2 _ 3 1 1
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8

First Merging Step
_ 2 _ 3
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1
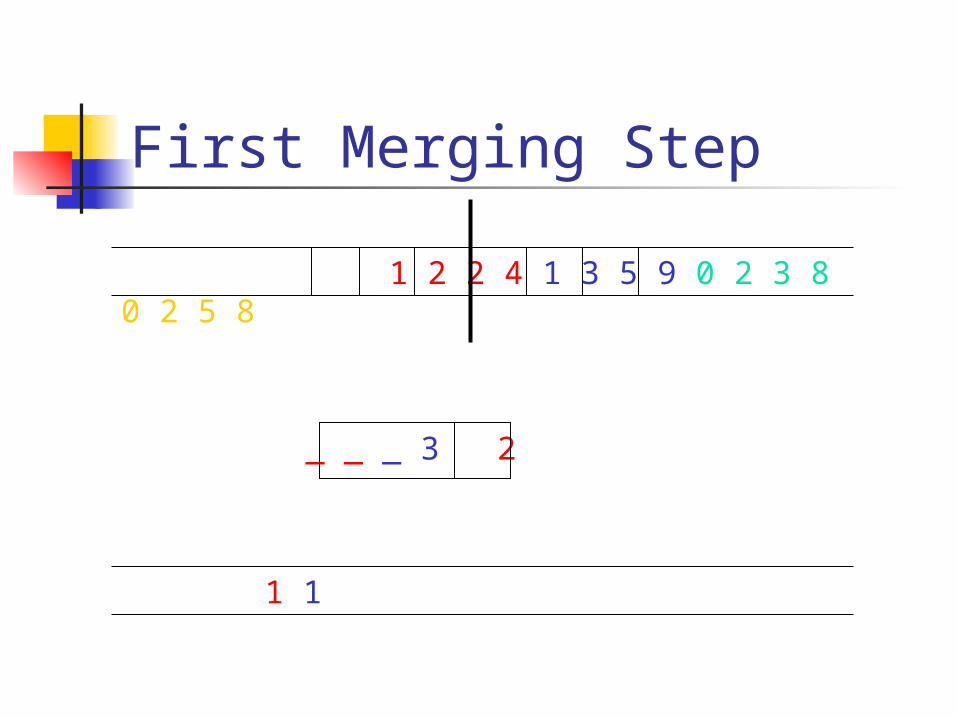
First Merging Step
_ _ _ 3 2
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1
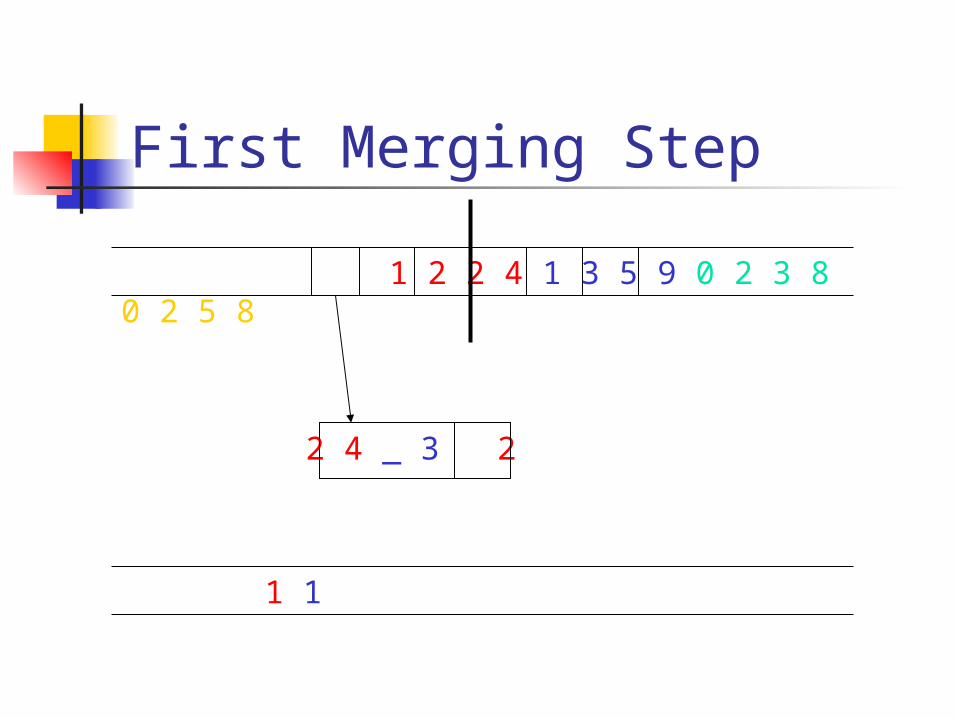
First Merging Step
2 4 _ 3 2
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1
First Merging Step
_ 4 _ 3 2 2
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1

First Merging Step
_ 4 _ 3
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1 2 2

End of First Merge
1 2 2 4 1 3 5 9 0 2 3 8 0 2 5 8
1 1 2 2 3 4 5 9 0 0 2 2 3 5 8 8

Start of Second Merge
1 1 2 2 3 4 5 9 0 0 2 2 3 5 8 8
1 1 0 0

End of Second Merge
1 1 2 2 3 4 5 9 0 0 2 2 3 5 8 8
0 0 1 1 2 2 2 2 3 3 4 5 5 8 8 9
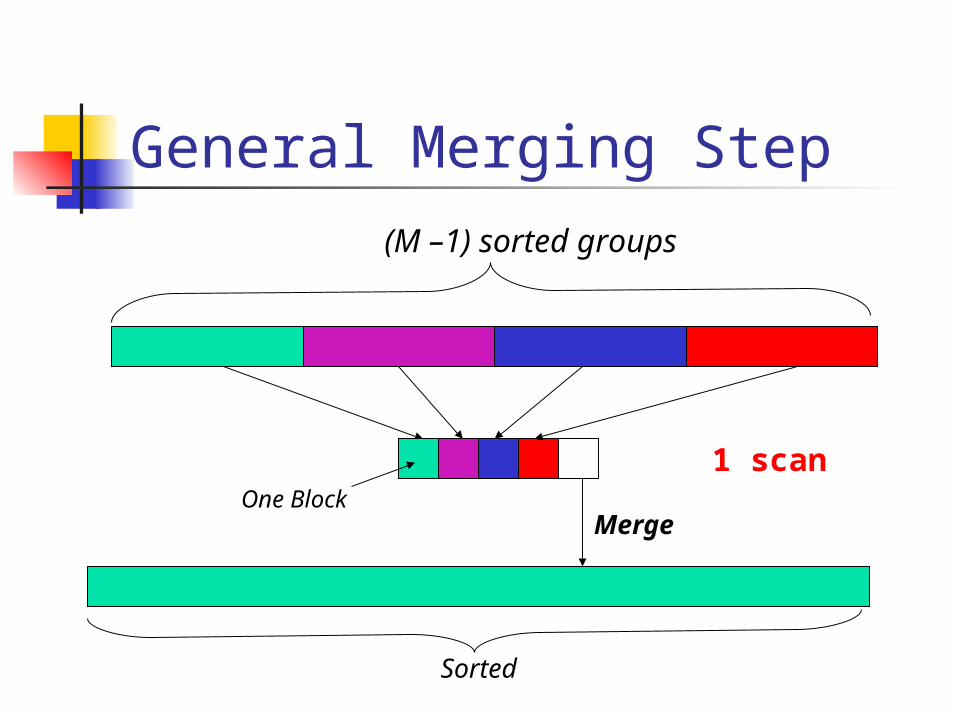
General Merging Step
Sorted
1 scan
(M –1) sorted groups
One BlockMerge

Overall Algorithm Repeat merging till all data sorted
N/(M-1) sorted groups to start with Merge (M-1) sorted groups into one
sorted group O(log N / log M) iterations Each iteration involves one scan of the data
O(log N/ log M) scans: Alternatively, N log N/ log M seeks

Lower Bounds for Sorting
Aggrawal and Vitter, 1988
Complexity in the RAM Model Comparison model:
Only allowed operation is comparison No arithmetic permitted Try and lower bound number of comparisons
Decision Tree: Input is an array of objects Every node is a comparison between two
fixed locations in the array Leaf nodes of tree give sorted order of objects
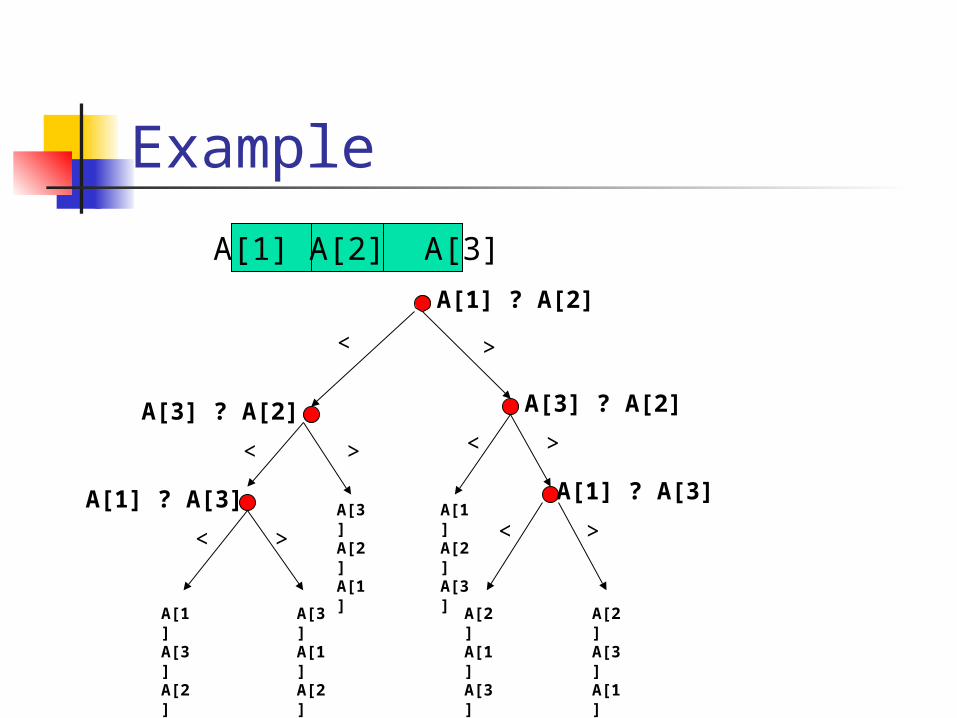
Example
A[1] A[2] A[3]
A[1] ? A[2]
< >
A[3] ? A[2]A[3] ? A[2]>
A[1] A[2] A[3]
<>
A[3] A[2] A[1]
<
< > ><A[1] ? A[3] A[1] ? A[3]
A[1] A[3] A[2]
A[3] A[1] A[2]
A[2] A[1] A[3]
A[2] A[3] A[1]
Decision Tree Complexity Properties of Decision Tree:
Two distinct orderings cannot map to same leaf node
Most sorting algorithms can be thought of as decision trees
Depth of any possible tree gives lower bound on number of comparisons required by any possible algorithm

Complexity of Sorting Given n objects in array:
Number of possible orderings = n! Any decision tree has branching
factor 2 Implies depth log (n!) = (n log n)
What about disk seeks needed?

I/O Complexity of Sorting Input has NB elements
Main memory size can store MB elements We know the ordering of all elements in
main memory What does a new seek do:
Read in B array elements New information obtained:
Ordering of B elements Ordering of (M-1)B elements already in memory
with the B new elements

Example Main memory has A < B < C
We read in D,E Possibilities:
D < E: D E A B C D A E B C A D B E C …
D > E: E D A B C E A D B C A E B D C …
20 possibilities in all

Fan Out of a Seek Number of possible outcomes of the
comparisons:
This is the branching factor for a seek
We need to distinguish between possible outcomes
( )!! exp( log( ))
( )!
MB MBB B MB
B MB B
( )!NB

Merge Sort Is Optimal
log(( )!) log( )Depth of Tree =
log( )( )!log
( )!
NB NBN
MBMBMB B
Merge Sort is almost optimal
Upper Bound for Merge Sort = O(N log N/ log M)

Improved Lower Bound Relative ordering of B elements in
block unknown iff block never seen before Only N such seeks In this case, possible orders =
Else, possible orders =
!MB
BB
MB
B

Better Analysis Suppose T seeks suffice For some N seeks:
Branching factor =
For the rest of the seeks: Branching factor =
!MB
BB
MB
B

Final Analysis
( !) ( )!
log log
log log
T
N MBB NB
B
NB N N NT
B M M
Merge Sort is optimal!

Some Notation Sort(X):
Number of seeks to sort X objects
Scan(X): Number of seeks to scan X objects =
log /
log
X BX
B M
X
B

Graph Connectivity
Munagala and Ranade, 1999

Problem Statement V vertices, E edges
Adjacency list: For every vertex, list the adjacent vertices O(E) elements, or O(E/B) blocks
Goal: Label each vertex with its connected component

Breadth First Search Properties of BFS:
Vertices can be grouped into levels
Edges from a particular level go to either:
Previous level Current level Next level

Notation Front(t) = Vertices at depth t
Nbr(t) = Neighbors of Front(t)

Example BFS Tree
Front(1)
Front(2)
Front(3)
Front(4)
Nbr(3)

Algorithm Scan edges adjacent to Front(t) to compute
Nbr(t)
Sort vertices in Nbr(t)
Eliminate: Duplicate vertices Front(t) and Front(t-1)
Yields Front(t+1)

Complexity I Scanning Front(t):
For each vertex in Front(t): Scan its edge list Vertices in Front(t) are not contiguous on
disk Round-off error of one block per vertex
O(Scan(E) + V) over all time t
Yields Nbr(t)

Complexity II Sorting Nbr(t):
Total size of Nbr(t) = O(E) over all times t Implies sorting takes O(sort(E)) I/Os
Total I/O: O(sort(E)+V)
Round-off error dominates if graph is sparse

PRAM Simulation
Chiang, Goodrich, Grove, Tamassia, Vengroff and Vitter
1995

PRAM Model
Memory
Parallel Processors
Model At each step, each processor:
Reads O(1) memory locations Performs computation Writes results to O(1) memory locations
Performed in parallel by all processors Synchronously! Idealized model

Terms for Parallel Algorithms Work:
Total number of operations performed
Depth: Longest dependency chain Need to be sequential on any parallel
machine
Parallelism: Work/Depth

PRAM Simulation Theorem: Any parallel algorithm with:
O(D) input data Performing O(W) work With depth one
can be simulated in external memory using O(sort(D+W)) I/Os

Proof Simulate all processors at once:
We write on disk the addresses of operands required by each processor
O(W) addresses in all
We sort input data based on addresses O(sort(D+W)) I/Os Data for first processor appears first, and so
on

More Proof Proof continued:
Simulate the work done by each processor in turn and write results to disk along
O(scan(W)) I/Os
Merge new data with input if required O(sort(D+W)) I/Os

Example: Find-min Given N numbers A[1…N] in array
Find the smallest number
Parallel Algorithm: Pair up the elements For each pair compute the smaller
number Recursively solve the N/2 size problem

Quality of Algorithm Work = N + N/2 + … = O(N)
Depth at each recursion level = 1 Total depth = O(log N)
Parallelism = O(N/log N)

External Memory Find Min First step: W = N, D = N, Depth = 1
I/Os = sort(N)
Second step: W = N/2, D = N/2, Depth = 1 I/Os = sort(N/2)
… Total I/Os = sort(N) + sort(N/2) + …
I/Os = O(sort(N))

Graph Connectivity Due to Chin, Lam and Chen, CACM 1982
Assume vertices given ids 1,2,…,V
Step 1: Construct two trees: T1: Make each vertex point to some
neighbor with smaller id T2: Make each vertex point to some
neighbor with larger id

Example
1
2
3
4
56
7
8
1
2
3
4
56
7
8
1
2
3
4
56
7
8
Graph T1 T2

Lemma One of T1 and T2 has at least V/2
edges Assuming each vertex has at least
one neighbor Proof is homework! Choose tree with more edges

Implementation Finding a larger/smaller id vertex:
Find Min or Find Max for each vertex O(E) work and O(log V) depth O(sort(E)) I/Os in external memory In fact, O(scan(E)) I/Os suffice!

Step 2: Pointer Doubling Let Parent[v] = Vertex pointed to by v
in tree If v has no parent, set Parent[v] = v
Repeat O(log V) times: Parent[v] = Parent[Parent[v]]
Each vertex points to root of tree to which it belongs

Implementation Work = O(V) per unit depth
Depth = O(log V)
I/Os = O(log V sort(V))
Total I/Os so far: O(scan(E) + log V sort(V))

Collapsing the Graph
2
56
7
1
9
1112
8
3
15
1314
10
4
1 3 4

Procedure Create new graph:
For every edge (u,v) Create edge (Parent[u], Parent[v]) O(E) work and O(1) depth O(scan(E)) I/Os trivially
Vertices: v such that Parent[v] = v Number of vertices at most ¾ V

Duplicate Elimination Sort new edge list and eliminate
duplicates O(E) work and O(log E) depth Parallel algorithm complicated O(sort(E)) I/Os trivially using Merge Sort
Total I/O so far: O(sort(E) + log V sort(V))

Iterate Problem size:
¾ V vertices At most E edges Iterate until number of vertices at most MB
For instance with V’ vertices and E’ edges: I/O complexity:
O(sort(E’) + log V’ sort(V’))

Total I/O Complexity
log ( )
3 3 log( ) ( ) log ...
4 4
log ( ) log( ) ( )
log( ) ( )
Vsort E
MB
V VV sort V sort
Vsort E V sort V
MB
V sort E

Comparison BFS Complexity:
O(sort(E) + V) Better for dense graphs (E > BV)
Parallel Algorithm Complexity: O(log V sort(E)) Better for sparse graphs

Best Algorithm Due to Munagala and Ranade, 1999
Upper bound:
Lower bound: (sort(E))
log log 1 ( )VB
O sort EE