
Evolutionary Synthesis of MEMS Design Ningning Zhou, Alice Agogino, Bo Zhu, Kris Pister*, Raffi...
29
Evolutionary Synthesis of MEMS Design Ningning Zhou, Alice Agogino, Bo Zhu, Kris Pister*, Raffi Kamalian Department of Mechanical Engineering, *Department of Electrical Engineering and Computer Science University of California at Berkeley
-
date post
18-Dec-2015 -
Category
Documents
-
view
216 -
download
1
Transcript of Evolutionary Synthesis of MEMS Design Ningning Zhou, Alice Agogino, Bo Zhu, Kris Pister*, Raffi...
Evolutionary Synthesis of MEMS Design
Ningning Zhou, Alice Agogino, Bo Zhu, Kris Pister*, Raffi Kamalian
Department of Mechanical Engineering,*Department of Electrical Engineering and
Computer ScienceUniversity of California at Berkeley
Outline Introduction MEMS GA representation Genetic operations Synthesis example 1 Synthesis example 2 Conclusion and Future work
Introduction to MEMS Synthesis MEMS are extremely small (~um)
mechanical elements often integrated together with electronic circuitry, manufactured in a similar way to computer microchips.
MEMS synthesis: automatically generate functional and optimum solutions for MEMS design. Device design synthesis Fabrication process synthesis

Evolutionary Approach Genetic algorithms are global stochastic
optimization techniques based on the adaptive mechanics of natural genetics.
Robust and non-problem specific. GAs code the parameter set of the optimization
problem as finite-length string. GAs start the searching from a population of
random points, improve the quality of the population over time by genetic operations: selection, crossover, mutation;
The best fitted solution will be evolved toward objective function.
Multi-objective Genetic Algorithms (MOGAs)
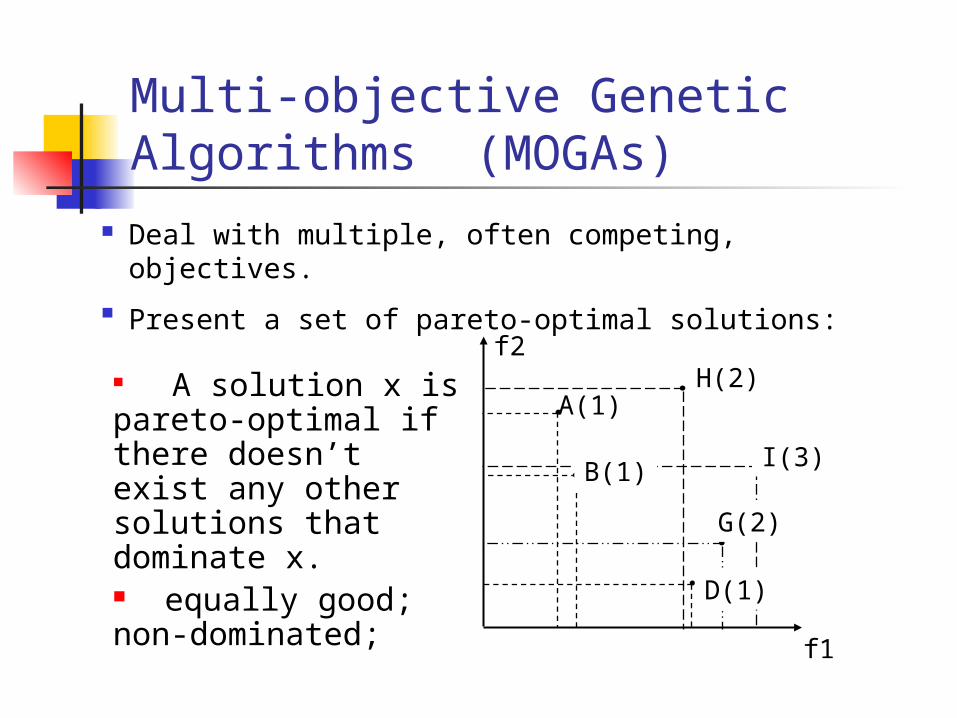
Deal with multiple, often competing, objectives. Present a set of pareto-optimal solutions:
A(1)
B(1)
D(1)
G(2)
H(2)
I(3)
f1
f2 A solution x is pareto-optimal if there doesn’t exist any other solutions that dominate x. equally good; non-dominated;
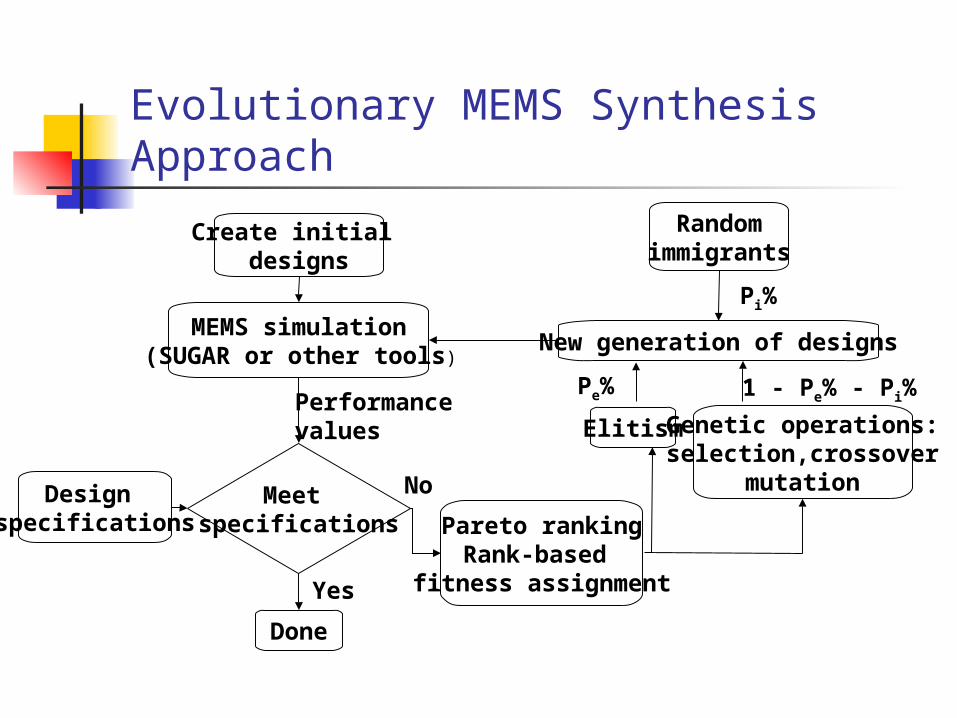
Evolutionary MEMS Synthesis Approach
Done
Pareto rankingRank-based
fitness assignment
Design specifications
MEMS simulation (SUGAR or other tools)
Create initial designs
Yes
No
New generation of designs
Randomimmigrants
Pe%
Elitism
Pi%
1 - Pe% - Pi%Performance values
Meet specifications
Genetic operations:selection,crossover
mutation
MEMS GA Representation A MEMS device is decomposed into
parameterized MEMS GA building blocks. Basic or primitive elements: anchors, beams etc. Clusters: springs(several beams), comb-drive
etc.
Represented by subnets in SUGAR. A rooted acyclic tree of building
components. Acyclic: open-chain structure. Rooted: A reference node.
GA Building Blocks Block type
A number is assignment to represent one type;
Block ports (nodes) Nodes connected to other building blocks;
Variable Parameters
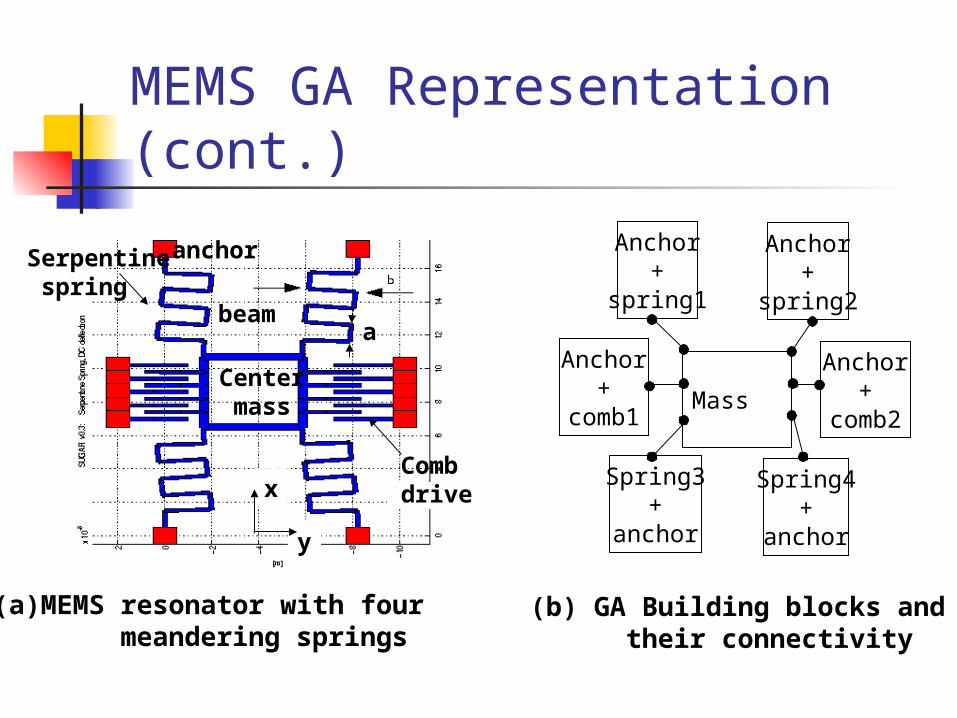
MEMS GA Representation (cont.)
Anchor+
spring1
Mass
(a) MEMS resonator with four meandering springs
Anchor+
spring2
Anchor+
comb1
Anchor+
comb2
Spring3+
anchor
Spring4+
anchor
(b) GA Building blocks and their connectivity
Center mass
Serpentine spring
Comb drive
anchor
beama
y
x
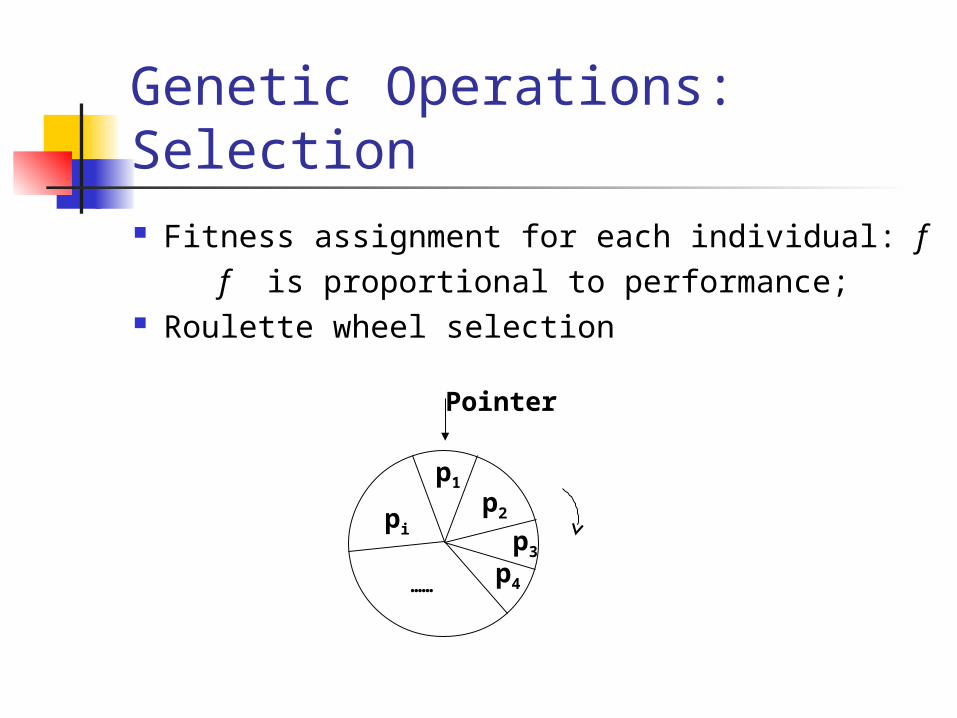
Genetic Operations: Selection Fitness assignment for each individual: f
f is proportional to performance; Roulette wheel selection
p1
p2
p3
p4
pi
……
Pointer
Genetic Operation: Crossover Cut and splice crossover
Analogous to the traditional one-point crossover Cut each parent into two pieces and exchange; Achieve configuration evolution.
Parametric Crossover Analogous to the traditional uniform crossover Arithmetical crossover for selected building block
parameters: c=λp1 + (1-λ)p2 Achieve building block parameter evolution.
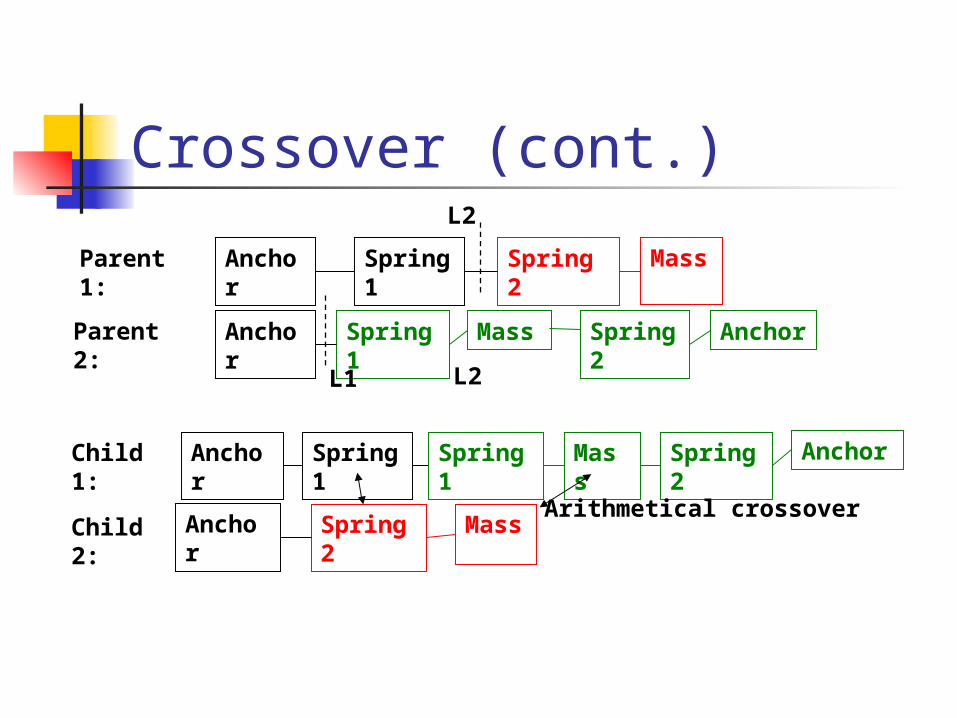
Crossover (cont.)
Anchor Spring 2Spring 1
Anchor Mass Spring 1 Spring 2 Anchor
Parent 1:
Parent 2:
L2
L1 L2
Anchor
Spring 2
Spring 1
Mass Anchor
Mass Spring 1 Spring 2 AnchorChild 1:
Child 2:
Mass
Arithmetical crossover
Mutation Uniform mutation Each design variable is replaced by
a random number within boundaries
Each design variable is mutated independently according to the mutation probability (very small).
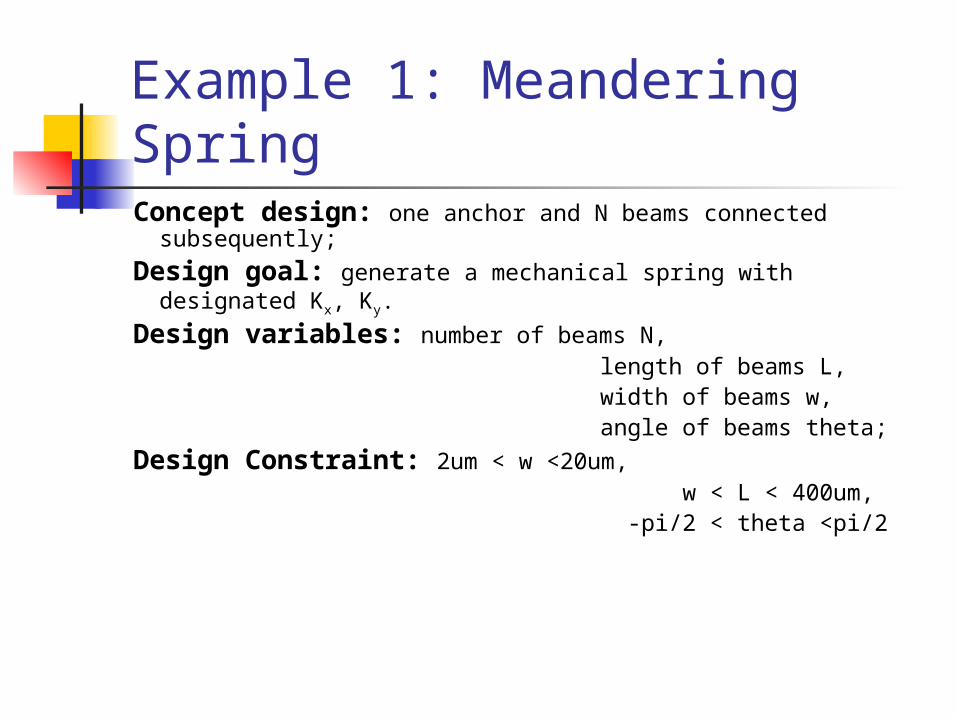
Example 1: Meandering SpringConcept design: one anchor and N beams
connected subsequently;
Design goal: generate a mechanical spring with designated Kx, Ky.
Design variables: number of beams N, length of beams L, width of beams w, angle of beams theta;
Design Constraint: 2um < w <20um, w < L < 400um, -pi/2 < theta <pi/2
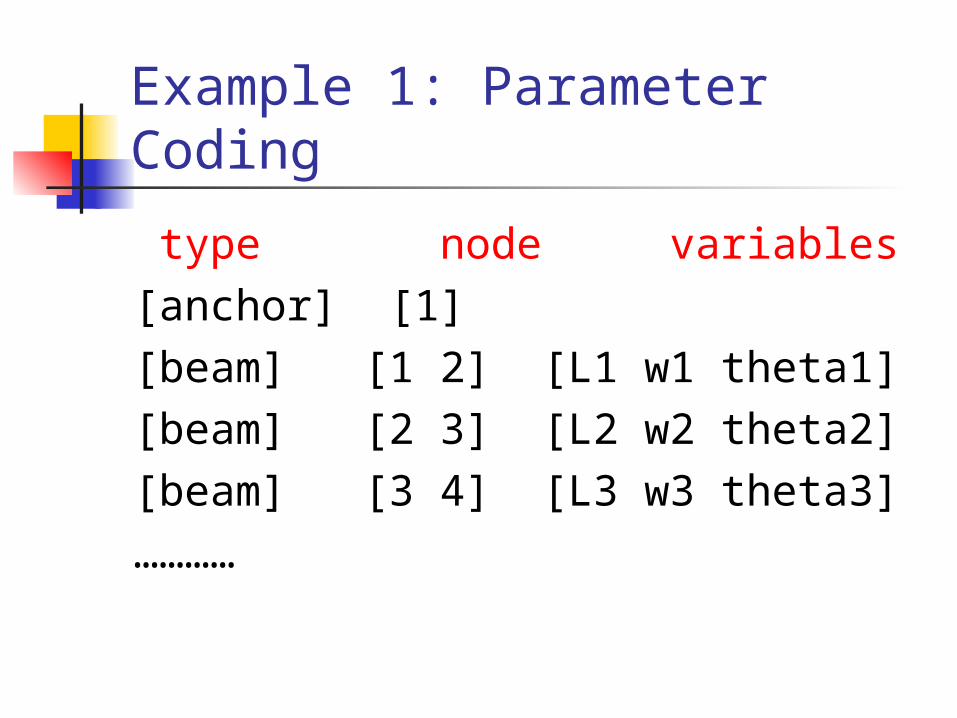
Example 1: Parameter Coding
type node variables[anchor] [1] [beam] [1 2] [L1 w1 theta1][beam] [2 3] [L2 w2 theta2][beam] [3 4] [L3 w3 theta3]…………
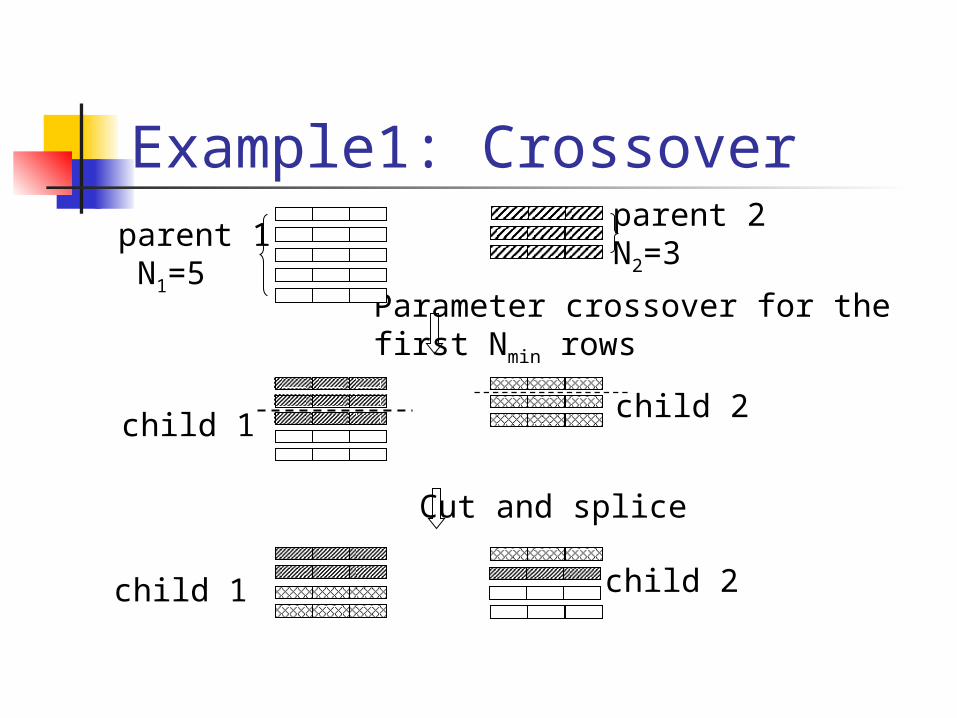
Example1: Crossoverparent 2N2=3
parent 1 N1=5
child 2child 1
child 2child 1
Parameter crossover for the first Nmin rows
Cut and splice
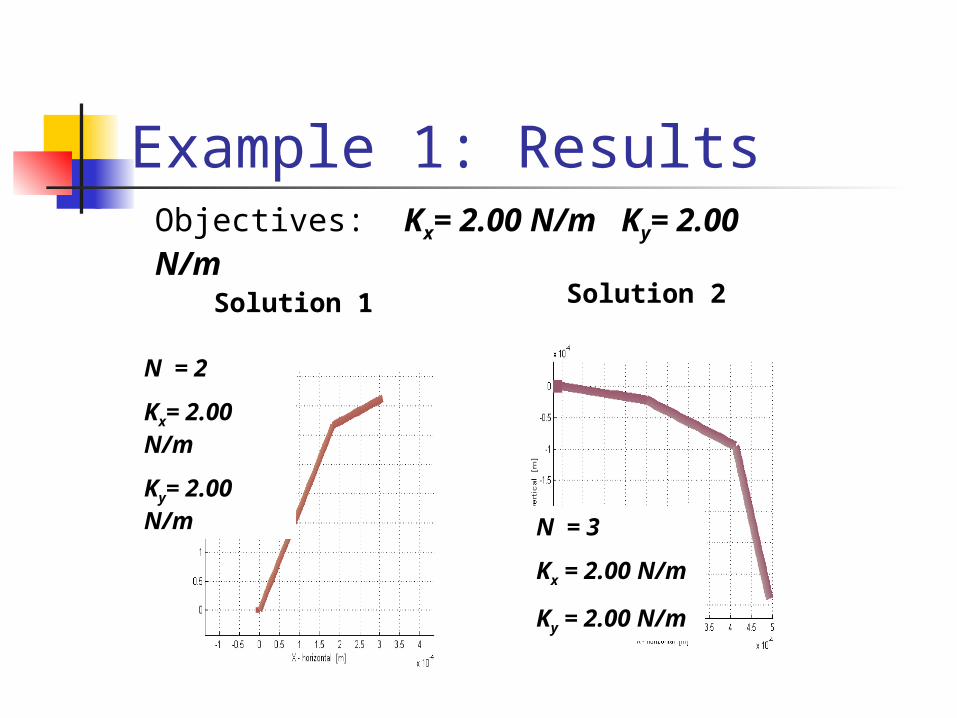
Example 1: Results
N = 2
Kx= 2.00 N/m
Ky= 2.00 N/m
Solution 1
N = 3
Kx = 2.00 N/m
Ky = 2.00 N/m
Solution 2
Objectives: Kx= 2.00 N/m Ky= 2.00 N/m
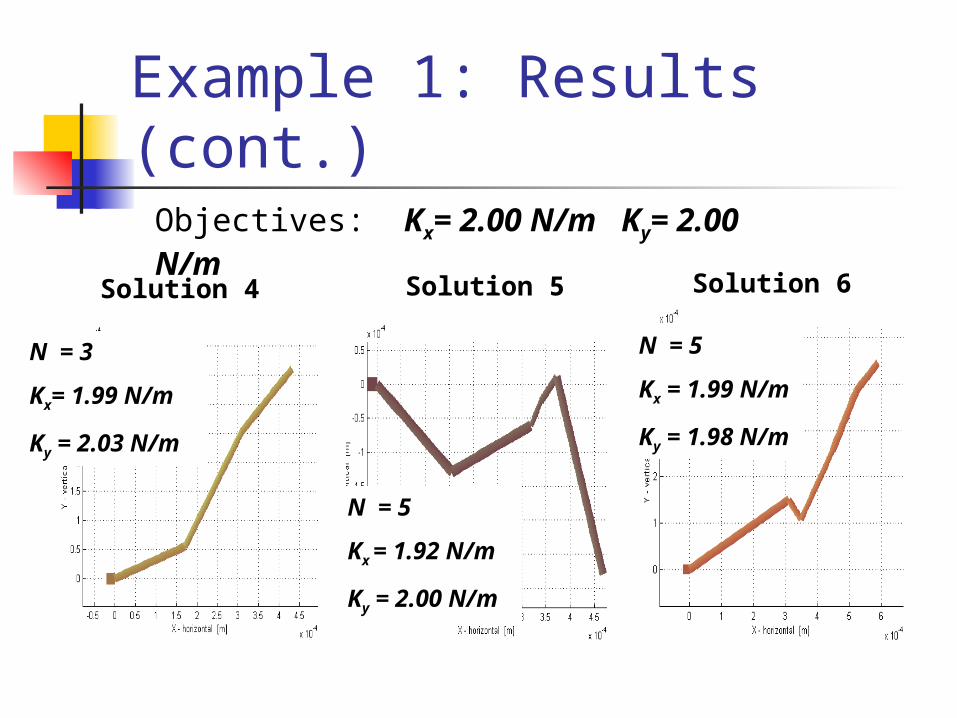
Example 1: Results (cont.)
Solution 5
N = 5
Kx = 1.92 N/m
Ky = 2.00 N/m
N = 5
Kx = 1.99 N/m
Ky = 1.98 N/m
Solution 6Solution 4
N = 3
Kx= 1.99 N/m
Ky = 2.03 N/m
Objectives: Kx= 2.00 N/m Ky= 2.00 N/m
Example 2: Meandering resonator
Concept design: four meandering spring and one center mass;
Design goal: generate a resonator with designated lowest resonant frequency f, stiffness Kx, Ky.
Design variables: parameters of each spring and the mass.
Design Constraint: 2um < w <20um,
w < L < 400um, -pi/2 < theta <pi/2
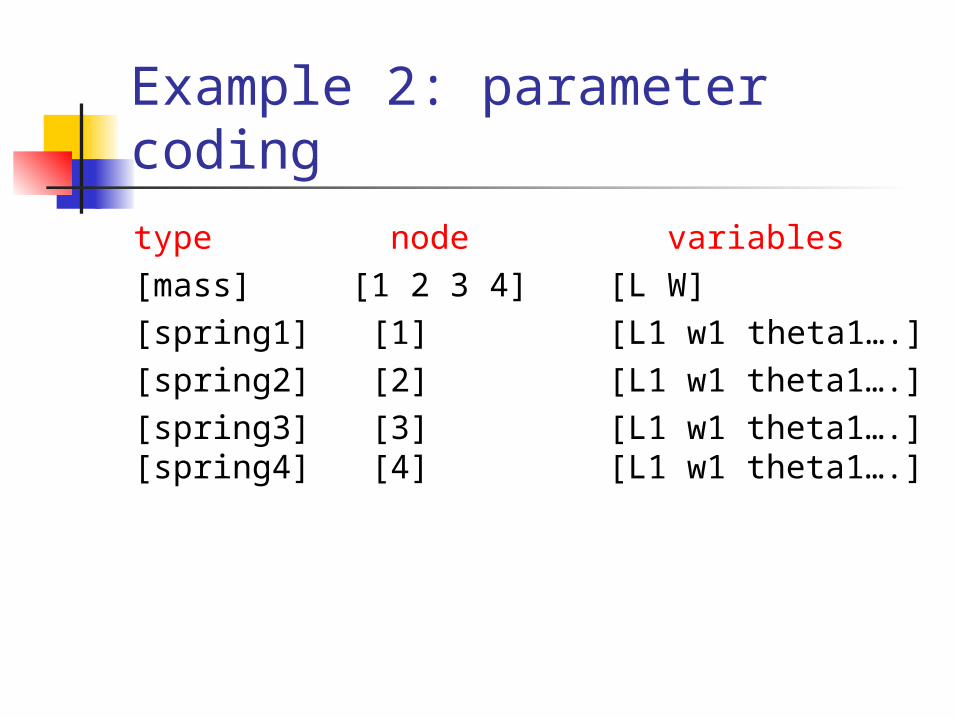
Example 2: parameter coding
type node variables[mass] [1 2 3 4] [L W][spring1] [1] [L1 w1 theta1….][spring2] [2] [L1 w1 theta1….][spring3] [3] [L1 w1 theta1….][spring4] [4] [L1 w1 theta1….]
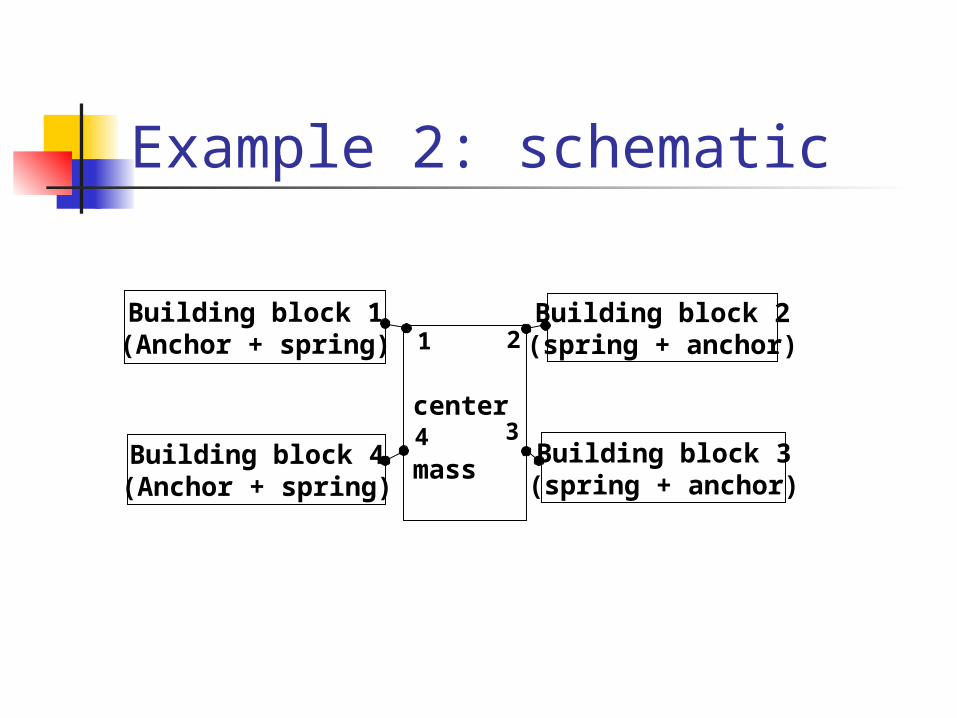
Example 2: schematic
Building block 1(Anchor + spring)
center mass
1 2
34
Building block 2(spring + anchor)
Building block 4(Anchor + spring)
Building block 3(spring + anchor)
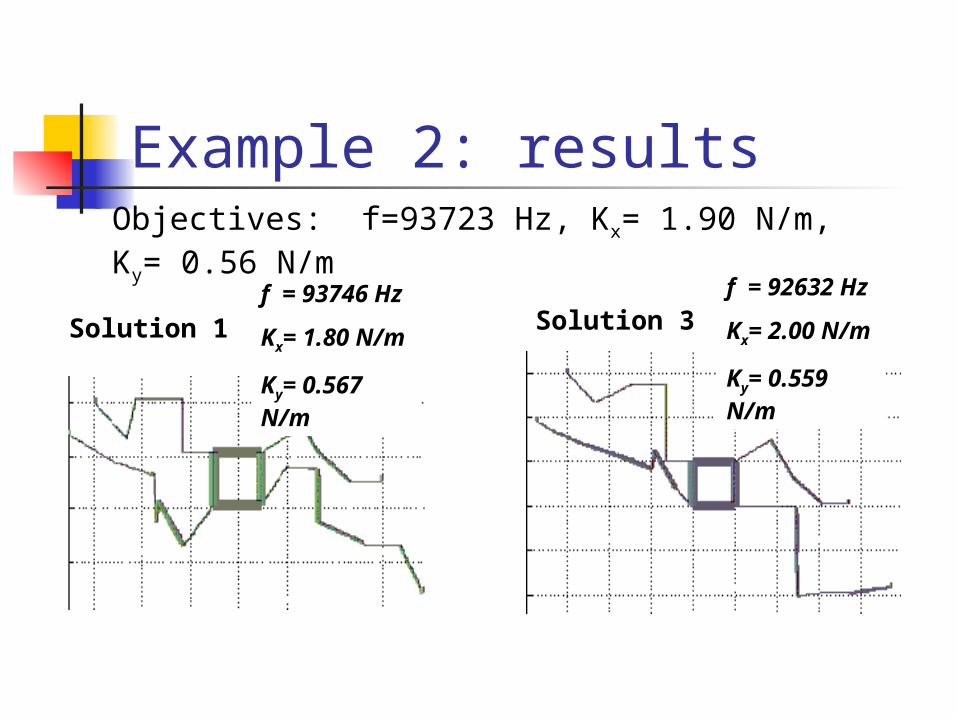
Example 2: results
Solution 1f = 93746 Hz
Kx= 1.80 N/m
Ky= 0.567 N/m
f = 92632 Hz
Kx= 2.00 N/m
Ky= 0.559 N/m
Solution 3
Objectives: f=93723 Hz, Kx= 1.90 N/m, Ky= 0.56 N/m
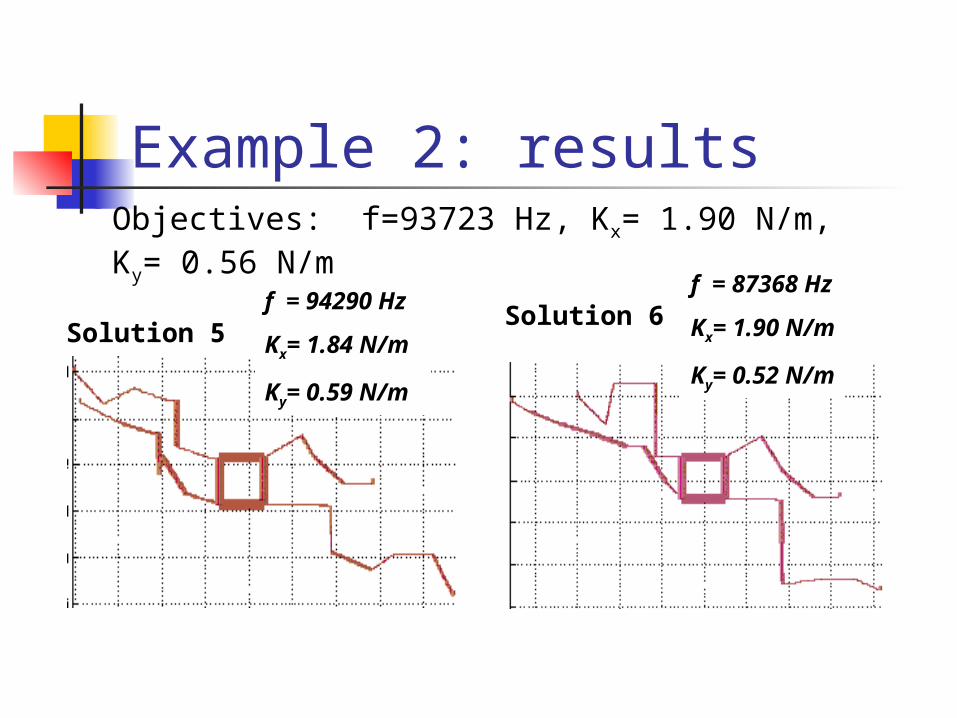
Example 2: results
f = 87368 Hz
Kx= 1.90 N/m
Ky= 0.52 N/m
Solution 6f = 94290 Hz
Kx= 1.84 N/m
Ky= 0.59 N/m
Solution 5
Objectives: f=93723 Hz, Kx= 1.90 N/m, Ky= 0.56 N/m
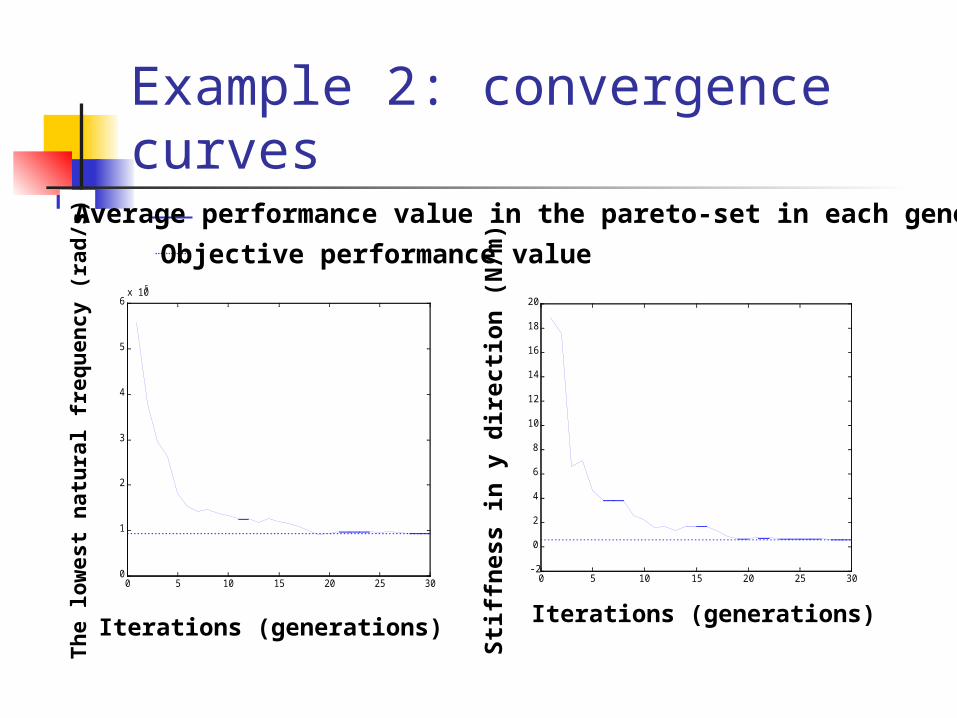
Example 2: convergence curves
0 5 10 15 20 25 300
1
2
3
4
5
6x 105
Iterations (generations)
Th
e lo
wes
t n
atu
ral f
req
uen
cy (
rad
/s)
0 5 10 15 20 25 30-2
0
2
4
6
8
10
12
14
16
18
20
Stif
fnes
s in
y d
irec
tion
(N
/m)
Iterations (generations)
Average performance value in the pareto-set in each generation
Objective performance value
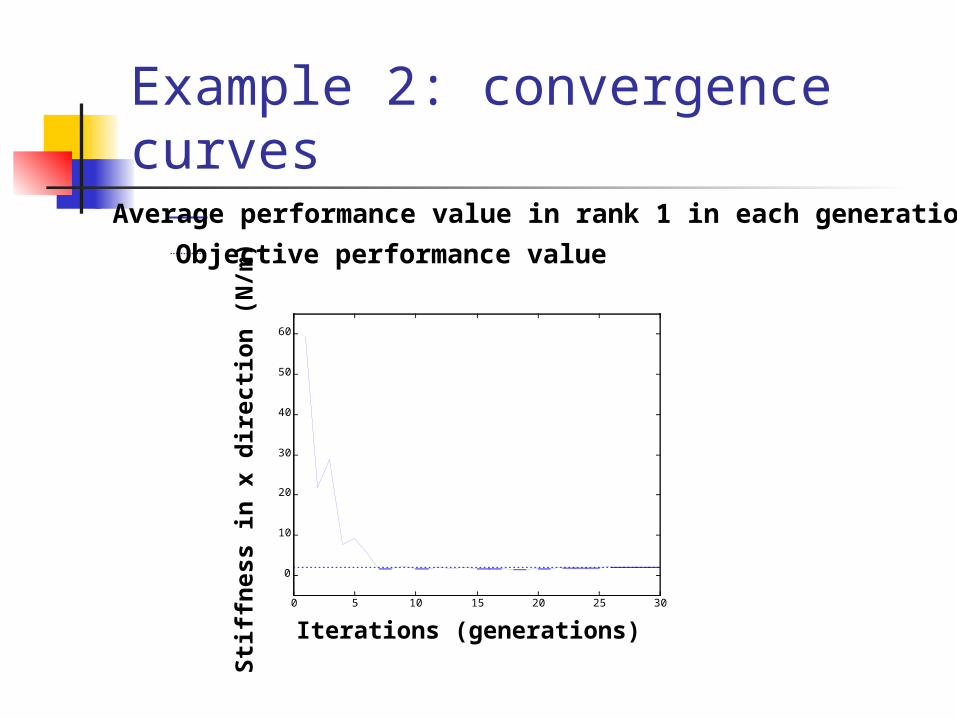
Example 2: convergence curves
0 5 10 15 20 25 30
0
10
20
30
40
50
60
Stif
fnes
s in
x d
irec
tion
(N
/m)
Iterations (generations)
Average performance value in rank 1 in each generation
Objective performance value
Conclusion A representation of MEMS designs with a rooted
acyclic tree of MEMS GA building blocks is proposed and shown to be effective and extensible for GA MEMS synthesis.
A crossover operator, with emphasis both on configuration and variable parameter searching, is developed and shown to be feasible.
Multi-objective genetic algorithms (MOGAs) were successfully applied to MEMS device design synthesis to produce results not previously envisioned by human designers.
Future Work Feedback from fabrication and testing on final
Pareto set. Develop heuristic rules to ensure valid
geometrical, functional & producible designs. Compare simulated annealing to genetic
algorithms for MEMS device synthesis. Develop library of MEMS devices (indexed by
function, materials, etc.) with useful GA building blocks (clusters & primitives).
Develop knowledge-based and case-based reasoning tools help to choose an initial concept design for MOGA.
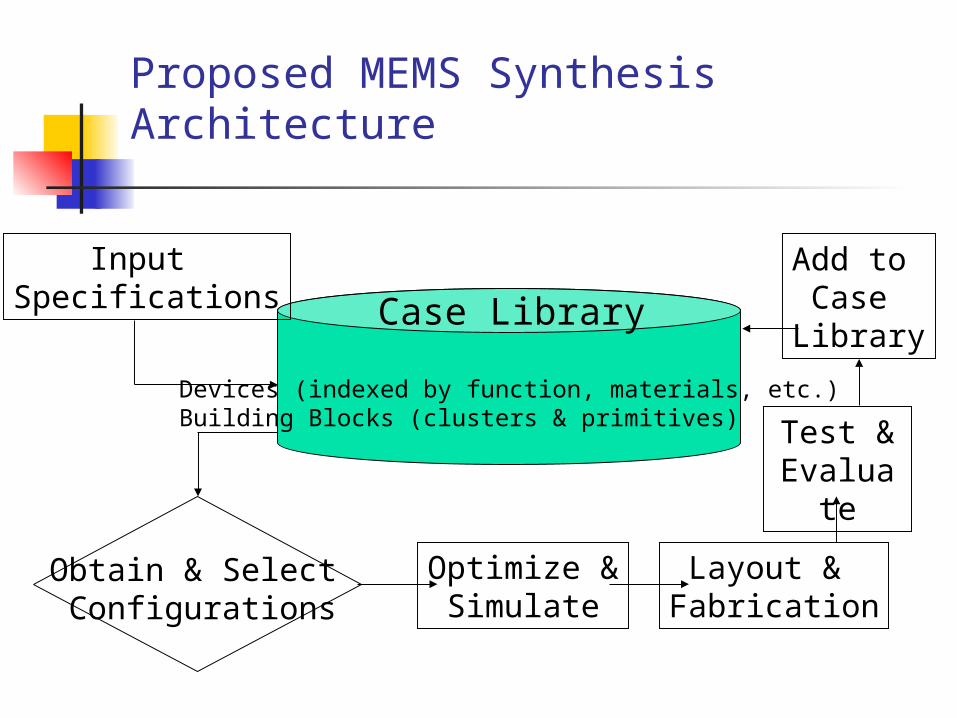
Proposed MEMS Synthesis Architecture
Devices (indexed by function, materials, etc.) Building Blocks (clusters & primitives)
Case Library
Input Specifications
Obtain & Select Configurations
Optimize &Simulate
Layout & Fabrication
Add to Case
Library
Test &Evaluate
Current MEMS Libraries None are indexed databases. All existing libraries relatively small and not
compatible with Sugar. CaMEL (Consolidated Micromechanical
Element Library) Non-Parametrized (springs, hinges, sliders,
actuators, accelerometers, gear trains, test structures, etc.)
Parametrized (comb drive, side drive, bearings, springs, test structures, etc.)
Commercial CAD tool libraries (e.g., MEMSCAP, Tanner, Coventor)















![Towards Prosperous, Inclusive and Sustainable Cities in ...sustainabledevelopment.un.org/content/documents...Microsoft PowerPoint - Ppt0000004 [Read-Only] Author: Ningning Created](https://static.fdocuments.in/doc/165x107/604603988ad23e38d63dc114/towards-prosperous-inclusive-and-sustainable-cities-in-su-microsoft-powerpoint.jpg)


