Graph Cut Algorithms for Binocular Stereo with Occlusions Vladimir Kolmogorov, Ramin Zabih.

Evaluation of Stereo Vision Algorithms
Grant Latham

Self-Driving Car Group
http://www.sdc-csm.com/

Outline
Stereo Vision – Overview
Popular Algorithms
Hardware
Evaluation Data Sets
Process and Results
Continuing Work and Recommendations

Stereo Vision - Overview
Motiviated by human binocular depth perception – leveraging difference in angle between two eyes.

Stereo Vision - Overview
Image from Dr. William Hoff

Stereo Vision - Algorithms
Challenge: finding matching pixels
Most common Algorithms:
Block Matching (BM)
Semi-Global Matching (SGM)

Hardware - Cameras
See3CAM_10CUG from e-con Systems
1.3 MegaPixel
Global shutter with external trigger
Interchangeable Lenses
USB 3.0/2.0 compatible

Hardware - GPU
NVidia Jetson TK1 embedded system
Kepler GPU with 192 CUDA cores
Supported by some OpenCV functions

Evaluation Datasets
Image pairs with “ground truth” found by pattern projection
Available from Middlebury: http://vision.middlebury.edu/stereo/data/scenes2014/

Process
Tested OpenCV’s basic Block Matching algorithm on PC CPU and Nvidia GPU;
GPU reduced processing time by ≈75%

Process
Further tests performed on CPU for convenience
Disparity images obtained from OpenCV’s BM and SGBM algorithms
Results exported to Matlab for analysis

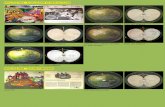
Results – Sample Image
BM Time (s)
SGBM Time (s)
BM Total Error
SGBM Total Error
BM Partial Error
SGBM Partial Error
BM Avg Error
SGBM Avg Error
2.4 68 0.52 0.19 0.05 0.07 1.71 4.35
Ground Truth Block Matching Semi-Global Block Matching

Results - Complete Image Name
BM Time (s)
SGMB Time (s)
BM Total Error
SGBM Total Error
BM Partial Error
SGBM Partial Error
BM Avg Error
SGBM Avg Error
Adirondack 2.1 65 0.74 0.39 0.07 0.07 1.01 2.24
Backpack 2.4 68 0.52 0.19 0.05 0.07 1.72 4.35
Jadeplant 2.0 59 0.97 0.85 0.31 0.40 -1.35 -19.90
Motorcycle 2.6 68 0.50 0.19 0.04 0.05 1.37 3.17
Piano 2.4 62 0.62 0.26 0.07 0.10 1.47 5.14
Pipes 2.6 65 0.57 0.22 0.08 0.09 1.81 4.76
Playroom 2.1 60 0.77 0.53 0.12 0.13 1.96 3.79
Playtable 2.1 57 0.63 0.26 0.04 0.05 0.99 2.32
Recycle 2.3 63 0.86 0.35 0.12 0.05 0.97 1.83
Shelves 2.5 67 0.72 0.42 0.11 0.22 1.27 8.83
Vintage 2.3 63 0.91 0.70 0.09 0.19 -0.30 -9.32

Recommendations
GPU Implementation
Basic BM algorithm for speed, conditional accuracy

Continuing Work
Utilize traffic scene priors
Schneider, N.; Franke, U., "Exploiting Traffic Scene Disparity Statistics for Stereo Vision," Computer Vision and
Pattern Recognition Workshops (CVPRW), 2014 IEEE Conference on , vol., no., pp.688,695, 23-28 June 2014
Utilize HSV domain
Lazaros Nalpantidis, Antonios Gasteratos, "Stereo vision for robotic applications in the presence of non-ideal
lighting conditions", Image and Vision Computing, Volume 28, Issue 6, June 2010

EL FIN
(Questions)







![Computer Vision and Image Understanding · Stereo matching abstract In most stereo-matching algorithms, stereo similarity measures are used to determine which image ... (NCC) [26]](https://static.fdocuments.in/doc/165x107/5e8623936e7b40199201559d/computer-vision-and-image-understanding-stereo-matching-abstract-in-most-stereo-matching.jpg)








