Estimation of heat flux and temperature distributions in a composite strip and homogeneous...
6
Estimation of heat flux and temperature distributions in a composite strip and homogeneous foundation ☆ Yu-Ching Yang ⁎, Shao-Shu Chu, Win-Jin Chang, Tser-Son Wu Clean Energy Center, Department of Mechanical Engineering, Kun Shan University, Yung-Kang City, Tainan 710-03, Taiwan, ROC abstract article info Available online 11 March 2010 Keywords: Inverse problem Composite strip Heat flux Conjugate gradient method In this study, an inverse algorithm based on the conjugate gradient method and the discrepancy principle is applied to estimate the unknown time-dependent heat flux and temperature distributions for the system composed of a multi-layer composite strip and semi-infinite foundation, from the knowledge of temperature measurements taken within the strip. It is assumed that no prior information is available on the functional form of the unknown heat flux; hence the procedure is classified as the function estimation in inverse calculation. Results show that an excellent estimation on the time-dependent heat flux can be obtained for the test case considered in this study. © 2010 Elsevier Ltd. All rights reserved. 1. Introduction Nowadays, a thin layer of another material is being deposited on an object's surface layer to obtain decorative, protecting, or specific technical properties of the object. More often, composite coatings are used in such applications. Composite materials are a combination of two or more materials that has properties that the component materials do not have by themselves. Composites, as a class of engineering materials, provide almost unlimited potential for higher strength, stiffness, and tribological resistance over the “pure” materials, such as metals, ceramics, polymers, etc. However, due to the high hardness and abrasiveness, composites are difficult to machine by conventional mechanical methods. An alterna- tive for composite materials processing is laser machining [1], which has several advantages over conventional processes. Laser machining is a thermal process, and moreover, very often a material is thrown out (ablation and evaporation) from the machining area. Therefore, analysis of heat and related phenomena, which takes place in composite coatings and in foundation can be very important. In the past, there have been many investigations focusing on the thermal properties in composite coatings and in foundation [2,3]. However, most of these works were limited in a previously given heat loading at the composite coating surface. Therefore, to apply these foregone investigations, it is necessary to find an effective approach to determine the heat loading at the composite coating surface. `In recent years, inverse analysis has become a valuable alternative when the direct measurement of data is difficult or the measuring process is very expensive, for example, the determination of heat transfer coefficients, the detection of contact resistance, the estimation of unknown thermophysical properties of new materials, the prediction of damage in the structure fields, the determination of heat flux at the outer surface of a vehicle re-entry, and so on. On the other hand, the estimation of heat source strength has been the main theme of a number of studies [4–6]. In this study, we present the conjugate gradient method [7–10] and the discrepancy principle [11] to estimate the time-varying heat flux in a system composed of a multi-layer composite strip on a homogeneous semi-space foundation by using the simulated temper- ature measurements. Subsequently, the distributions of temperature in the composite strip and homogeneous foundation can be determined as well. The conjugate gradient method belongs to a class of iterative regularization techniques. The regularization procedure is performed during the iterative process, thus the determination of optimal regularization condition is not needed. No prior information is used in the functional form of the heat flux variation with time. On the other hand, the discrepancy principle is used to terminate the iteration process in the conjugate gradient method. 2. Analysis 2.1. Direct problem To illustrate the methodology for developing expressions for the use in estimating the unknown time-dependent heat flux for the system composed of a multi-layer composite strip and semi-infinite foundation, we consider the following transient heat transfer problem as shown in Fig. 1. The multi-layer composite strip consists of n periodically repeated cells Δ ={(x, y) a R 2 ,0 ≤ x ≤ a ∪ 0 ≤ y ≤ b} of rect- angular shape each, therefore the total composite strip thickness d is equal to nb. In turn, each of these cells is further composed of four various subcells which also have rectangular shape Δ i , i =1–4, where International Communications in Heat and Mass Transfer 37 (2010) 495–500 ☆ Communicated by W.J. Minkowycz. ⁎ Corresponding author. E-mail address: [email protected] (Y.-C. Yang). 0735-1933/$ – see front matter © 2010 Elsevier Ltd. All rights reserved. doi:10.1016/j.icheatmasstransfer.2010.02.005 Contents lists available at ScienceDirect International Communications in Heat and Mass Transfer journal homepage: www.elsevier.com/locate/ichmt
-
Upload
yu-ching-yang -
Category
Documents
-
view
214 -
download
2
Transcript of Estimation of heat flux and temperature distributions in a composite strip and homogeneous...

International Communications in Heat and Mass Transfer 37 (2010) 495–500
Contents lists available at ScienceDirect
International Communications in Heat and Mass Transfer
j ourna l homepage: www.e lsev ie r.com/ locate / ichmt
Estimation of heat flux and temperature distributions in a composite strip andhomogeneous foundation☆
Yu-Ching Yang ⁎, Shao-Shu Chu, Win-Jin Chang, Tser-Son WuClean Energy Center, Department of Mechanical Engineering, Kun Shan University, Yung-Kang City, Tainan 710-03, Taiwan, ROC
☆ Communicated by W.J. Minkowycz.⁎ Corresponding author.
E-mail address: [email protected] (Y.-C. Yang
0735-1933/$ – see front matter © 2010 Elsevier Ltd. Aldoi:10.1016/j.icheatmasstransfer.2010.02.005
a b s t r a c t
a r t i c l e i n f oAvailable online 11 March 2010
Keywords:Inverse problemComposite stripHeat fluxConjugate gradient method
In this study, an inverse algorithm based on the conjugate gradient method and the discrepancy principle isapplied to estimate the unknown time-dependent heat flux and temperature distributions for the systemcomposed of a multi-layer composite strip and semi-infinite foundation, from the knowledge of temperaturemeasurements taken within the strip. It is assumed that no prior information is available on the functionalform of the unknown heat flux; hence the procedure is classified as the function estimation in inversecalculation. Results show that an excellent estimation on the time-dependent heat flux can be obtained forthe test case considered in this study.
).
l rights reserved.
© 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Nowadays, a thin layer of another material is being deposited onan object's surface layer to obtain decorative, protecting, or specifictechnical properties of the object. More often, composite coatings areused in such applications. Composite materials are a combination oftwo or more materials that has properties that the componentmaterials do not have by themselves. Composites, as a class ofengineering materials, provide almost unlimited potential for higherstrength, stiffness, and tribological resistance over the “pure”materials, such as metals, ceramics, polymers, etc.
However, due to the high hardness and abrasiveness, composites aredifficult to machine by conventional mechanical methods. An alterna-tive for compositematerials processing is lasermachining [1],whichhasseveral advantages over conventional processes. Laser machining is athermal process, and moreover, very often a material is thrown out(ablation and evaporation) from themachining area. Therefore, analysisof heat and relatedphenomena,which takesplace in composite coatingsand in foundation can be very important. In the past, there have beenmany investigations focusing on the thermal properties in compositecoatings and in foundation [2,3]. However, most of these works werelimited in a previously given heat loading at the composite coatingsurface. Therefore, to apply these foregone investigations, it is necessaryto find an effective approach to determine the heat loading at thecomposite coating surface.
`In recent years, inverse analysis has become a valuable alternativewhen the direct measurement of data is difficult or the measuringprocess is very expensive, for example, the determination of heat
transfer coefficients, the detection of contact resistance, the estimationof unknown thermophysical properties of newmaterials, the predictionof damage in the structure fields, the determination of heat flux at theouter surface of a vehicle re-entry, and so on. On the other hand, theestimationof heat source strengthhas been themain themeof a numberof studies [4–6]. In this study,wepresent the conjugate gradientmethod[7–10] and the discrepancy principle [11] to estimate the time-varyingheat flux in a system composed of a multi-layer composite strip on ahomogeneous semi-space foundation by using the simulated temper-ature measurements. Subsequently, the distributions of temperature inthe composite strip and homogeneous foundation can be determined aswell. The conjugate gradient method belongs to a class of iterativeregularization techniques. The regularization procedure is performedduring the iterative process, thus the determination of optimalregularization condition is not needed. No prior information is used inthe functional form of the heat flux variation with time. On the otherhand, the discrepancy principle is used to terminate the iterationprocess in the conjugate gradient method.
2. Analysis
2.1. Direct problem
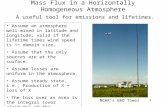
To illustrate the methodology for developing expressions for theuse in estimating the unknown time-dependent heat flux for thesystem composed of a multi-layer composite strip and semi-infinitefoundation, we consider the following transient heat transfer problemas shown in Fig. 1. The multi-layer composite strip consists of nperiodically repeated cells Δ={(x,y)aR2,0≤x≤a∪0≤y≤b} of rect-angular shape each, therefore the total composite strip thickness d isequal to nb. In turn, each of these cells is further composed of fourvarious subcells which also have rectangular shape Δi, i=1–4, where

Nomenclature
c specific heat (kJ kg−1 K−1)d thickness of the composite strip (m)J functionalJ′ gradient of functionalk thermal conductivity (Wm−1 K−1)p direction of descentq intensity of the heat flux (Wm−2)T temperature (K)T0 initial temperature of the system (K)t time coordinate (s)x spatial coordinate (m)Y measured temperature (K)y spatial coordinate (m)
Greek symbolsα thermal diffusivity (m2 s−1)β step sizeγ conjugate coefficientη very small valueλ variable used in adjoint problemρ density (kg m−3)σ standard deviationτ transformed time coordinateϖ random variableΔ small variation quality
Superscripts/subscriptsK iterative numberm measurement position* dimensionless quantity
496 Y.-C. Yang et al. / International Communications in Heat and Mass Transfer 37 (2010) 495–500
Δ1 has size defined by a1×b1. Outer surface of the composite strip isheated at uniform rate by heat flux of intensity q(t). Here, the perfectheat contact between the composite strip and the foundation andbetween each subcells of the cells is assumed.
By applying homogenisation model with the use of microlocalparameters, the dimensionless governing equations and the associated
Fig. 1. Geometry and coordinate system.
boundary and initial conditions for the system of the above-mentionedstructure can be written as [3]:
∂2T4s ðy4; t4Þ∂y42 =
∂T4s ðy4; t4Þ∂t4
; 0≤y4≤1; t4 N 0; ð1Þ
∂2T4f ðy4; t4Þ∂y42 =
1αfs
∂T4f ðy4; t4Þ∂t4
; 1≤y4b∞; t4 N 0; ð2Þ
−∂T4s ð0; t4Þ∂y4
= q4ðt4Þ; y4 = 0; t4 N 0; ð3Þ
T4f ðy4; t4Þ→0; y4→∞; t4 N 0; ð4Þ
T4s ð1; t4Þ = T4f ð1; t4Þ; y4 = 1; t4 N 0; ð5Þ
∂T4s ð1; t4Þ∂y4
= kfs∂T4f ð1; t4Þ
∂y4; y4 = 1; t4 N 0; ð6Þ
T4s ðy4;0Þ = 0; 0≤y4≤1; t4 = 0; ð7Þ
T4f ðy4;0Þ = 0; 1≤y4b∞; t4 = 0; ð8Þ
where the subscripts s and f refer to the regions of composite strip andfoundation, respectively. q⁎(t⁎) in Eq. (3) is the dimensionless heatflux at the outer surface of composite strip. In general, the heat fluxshould be a function of time.
The dimensionless variables used in the above formulation aredefined as follows:
y4 = y= d; t4 = αst = d2; q4 = dq= ksT0; T4s = ðTs−T0Þ = T0;
T4f = ðTf−T0Þ = T0; αfs = αf =αs; kfs = kf = ks;
ð9Þ
where d is the thickness of composite strip, q is the heat flux at theouter surface of composite strip, and T0 is the temperature of thesystem at t=0. k and α are the thermal conductivity and thermaldiffusivity, respectively.
The thermal conductivity and specific heat for the composite stripcan be expressed as [3]:
ks =η1k1k4
ð1−η2Þk1 + η2k4+
ð1−η1Þk2k3ð1−η2Þk2 + η2k3
; ð10Þ
cs = η1η2c1 + ð1−η1Þη2c2 + ð1−η1Þð1−η2Þc3 + η1ð1−η2Þc4; ð11Þ
η1 =a1a; η2 =
b1b
ð12Þ
where ki and ci, i=1–4, are the thermal conductivity and specific heatof the elementary subcell Δi. The direct problem considered here isconcerned with the determination of the medium temperature whenthe heat flux q⁎(t⁎), thermophysical properties of the system, andinitial and boundary conditions are known.
2.2. Inverse problem
For the inverse problem, the function q⁎(t⁎) is regarded as beingunknown, while everything else in Eqs. (1)–(8) is known. In addition,temperature readings taken at y=ym in the strip region areconsidered available. The objective of the inverse analysis is to predictthe unknown time-dependent function of intensity of the heat flux,q⁎(t⁎), merely from the knowledge of these temperature readings. Letthe measured temperature at the measurement position y=ym and

497Y.-C. Yang et al. / International Communications in Heat and Mass Transfer 37 (2010) 495–500
time t be denoted by Y(ym, t). Then this inverse problem can be statedas follows: by utilizing the above mentioned measured temperaturedata Y(ym, t), the unknown q⁎(t⁎) is to be estimated over the specifiedtime domain.
The solution of the present inverse problem is to be obtained insuch a way that the following functional is minimized:
J q4 t4� �h i
= ∫t4f
t4 = 0T4s y4m;t4
� �−Y4 y4m;t4
� �h i2dt4; ð13Þ
where Y⁎(ym⁎ , t⁎)=[Y(ym, t)−T0]/T0, and Ts⁎(ym⁎ , t⁎) is the estimated(or computed) temperature at the measurement location y⁎=ym⁎ . Inthis study, Ts⁎(ym⁎ , t⁎) are determined from the solution of the directproblem given previously by using an estimated q⁎K(t⁎) for the exactq⁎(t⁎), here q⁎K(t⁎) denotes the estimated quantities at the Kthiteration. tf⁎ is the final time of the measurement. In addition, in orderto develop expressions for the determination of the unknown q⁎(t⁎), a“sensitivity problem” and an “adjoint problem” are constructed asdescribed below.
2.3. Sensitivity problem and search step size
The sensitivity problem is obtained from the original directproblem defined by Eqs. (1)–(8) in the following manner: It isassumed that when q⁎(t⁎) undergoes a variation Δq⁎(t⁎), Ts⁎(y⁎, t⁎)and Tf⁎(y⁎, t⁎) are perturbed by Ts⁎+ΔTs⁎ and Tf⁎+ΔTf⁎, respectively.Then replacing in the direct problem q⁎(t⁎) by q⁎(t⁎)+Δq⁎(t⁎), Ts⁎by Ts⁎+ΔTs⁎, and Tf⁎ by Tf⁎+ΔTf⁎, subtracting from the resultingexpressions the direct problem, and neglecting the second-orderterms, the following sensitivity problem for the sensitivity functionΔTs⁎ and ΔTf⁎ can be obtained:
∂2ΔT4s ðy4; t4Þ∂y42 =
∂ΔT4s ðy4; t4Þ∂t4
; 0≤y4≤1; t4 N 0; ð14Þ
∂2ΔT4f ðy4; t4Þ∂z42 =
1αfs
∂ΔT4f ðy4; t4Þ∂t4
; 1≤y4b∞; t4 N 0; ð15Þ
−∂ΔT4s ð0; t4Þ∂y4
= Δq4ðt4Þ; y4 = 0; t4 N 0; ð16Þ
ΔT4f ðy4; t4Þ→0; y4→∞; t4 N 0; ð17Þ
ΔT4s ð1; t4Þ = ΔT4f ð1; t4Þ; y4 = 1; t4 N 0; ð18Þ
∂ΔT4s ð1; t4Þ∂y4
= kfs∂ΔT4f ð1; t4Þ
∂y4; y4 = 1; t4 N 0; ð19Þ
ΔT4s ðy4;0Þ = 0; 0≤y4≤1; t4 = 0; ð20Þ
ΔT4f ðy4;0Þ = 0; 1≤y4b∞; t4 = 0: ð21Þ
The sensitivity problem of Eqs. (14)–(21) can be solved by thesame method as the direct problem of Eqs. (1)–(8).
2.4. Adjoint problem and gradient equation
To formulate the adjoint problem, Eqs. (1) to (2) are multiplied bythe Lagrange multipliers (or adjoint functions) λs⁎ and λf⁎, respectively,and the resulting expressions are integrated over the time and
correspondent space domains. Then the results are added to the righthand sideof Eq. (13) to yield the followingexpression for the functionalJ[q⁎(t⁎)]:
J q4 t4� �h i
= ∫t4f
t4 = 0∫1y4 = 0 T4s y4;t4
� �−Y4 y4;t4
� �h i2⋅δ y4−y4m� �
dy4dt4
+ ∫t4f
t4 = 0∫1y4 = 0λ
4s y4; t4� �
⋅ ∂2T4s∂y42 −
∂T4s∂t4
" #dy4dt4
+ ∫t4f
t4 = 0∫∞y4 = 1λ
4f y4; t4� �
⋅∂2T4f∂y42 −
1αfs
∂T4f∂t4
24
35dy4dt4;
ð22Þ
where δ(⋅) is theDirac function. The variationΔJ is derived after q⁎(t⁎) isperturbed by Δq⁎(t⁎), Ts⁎ and Tf⁎ are perturbed by Ts⁎+ΔTs⁎ and Tf⁎+ΔTf⁎,respectively, in Eq. (22). Subtracting from the resulting expression theoriginal Eq. (22) and neglecting the second-order terms, we thus find:
ΔJ q4 t4� �h i
= ∫t4f
t4 = 0∫1y4 = 02 T4s y4;t4
� �−Y4 y4;t4
� �h i⋅ΔT4s ⋅δ y4−y4m
� �dy4dt4
+ ∫t4f
t4 = 0∫1y4 = 0λ
4s y4; t4� �
⋅ ∂2ΔT4s∂y42 −∂ΔT4s
∂t4
" #dy4dt4
+ ∫t4f
t4 = 0∫∞y4 = 1λ
4f y4; t4� �
⋅∂2ΔT4f∂y42 − 1
αfs
∂ΔT4f∂t4
24
35dy4dt4:
ð23Þ
We can integrate the second and the third double integral terms inEq. (23) by parts, utilizing the initial and boundary conditions of thesensitivity problem. The vanishing of the integrands containing ΔTs⁎
and ΔTf⁎ leads to the following adjoint problem for the determinationof λs
⁎ and λf⁎:
∂2λ4s y4; t4� �∂y42 +
∂λ4s y4; t4� �∂t4
+ 2 T4s y4;t4� �
−Y4 y4m ;t4� �h i
⋅δ y4−y4m� �
= 0; 0≤y4≤1; t4 N 0;
ð24Þ∂2λ4f ðy4; t4Þ
∂y42 +1αfs
∂λ4f ðy4; t4Þ∂t4
= 0; 1≤y4b∞; t4 N 0; ð25Þ
∂λ4s ð0; t4Þ∂y4
= 0; y4 = 0; t4 N 0; ð26Þ
λ4f ðy4; t4Þ→0; y4→∞; t4 N 0; ð27Þ
kfsλ4s ð1; t4Þ = λ4f ð1; t4Þ; y4 = 1; t4 N 0; ð28Þ
∂λ4s ð1; t4Þ∂y4
=∂λ4f ð1; t4Þ
∂y4; y4 = 1; t4 N 0; ð29Þ
λ4s ðy4; t4f Þ = 0; 0≤y4≤1; t4 = t4f ; ð30Þ
λ4f ðy4; t4f Þ = 0; 1≤y4b∞; t4 = t4f : ð31Þ
The adjoint problem is different from the standard initial valueproblem in that the final time condition at time t⁎= tf⁎ is specifiedinstead of the customary initial condition at time t⁎=0. However, thisproblem can be transformed to an initial value problem by thetransformation of the time variable as τ⁎=tf⁎−t⁎. Then the adjointproblem can be solved by the same method as the direct problem.
Finally the following integral term is left:
ΔJ = ∫t4f
t4 = 0λ4s ð0;t4ÞΔq4ðt4Þdt4: ð32Þ
From the definition used in Ref. [7], we have:
ΔJ = ∫t4f
t4 = 0J′ðt4ÞΔq4ðt4Þdt4; ð33Þ

498 Y.-C. Yang et al. / International Communications in Heat and Mass Transfer 37 (2010) 495–500
where J’(t⁎) is the gradient of the functional J(q⁎). A comparison ofEqs. (32) and (33) leads to the following form:
J′ðt4Þ = λ4s ð0;t4Þ: ð34Þ
2.5. Conjugate gradient method for minimization
The following iteration process based on the conjugate gradientmethod is now used for the estimation of q⁎(t⁎) by minimizing theabove functional J[q⁎(t⁎)]:
q4K + 1ðt4Þ = q4Kðt4Þ−βKp4Kðt4Þ ; K = 0; 1; 2; :::; ð35Þ
where βK is the search step size in going from iteration K to iterationK+1, and p⁎K(t⁎) is the direction of descent (i.e., search direction)given by:
p4Kðt4Þ = J′Kðt4Þ + γKp4K−1ðt4Þ ; ð36Þ
which is conjugation of the gradient direction J’K(t⁎) at iteration K andthe direction of descent p⁎K−1(t⁎) at iteration K−1. The conjugatecoefficient γK is determined from:
γK =∫t4f
t4 = 0J′K ðt4Þh i2
dt4
∫t4f
t4 = 0J′K−1ðt4Þh i2
dt4; with γ0 = 0 : ð37Þ
The convergence of the above iterative procedure in minimizing thefunctional J is proved in Ref. [7]. To perform the iterations accordingto Eq. (35), we need to compute the step size βK and the gradient ofthe functional J’K(t⁎).
The functional J[q⁎K+1(t⁎)] for iteration K+1 is obtained byrewriting Eq. (13) as:
J q4K + 1ðt4Þh i
= ∫t4f
t4 = 0T4s q4K−βKp4K
� �−Y4 y4m;t4
� �h i2dt4; ð38Þ
where we replace q⁎K+1 by the expression given by Eq. (35). Iftemperature Ts⁎(q⁎K−βKp⁎K) is linearized by a Taylor expansion,Eq. (38) takes the form:
J q4K + 1 t4� �h i
= ∫t4f
t4 = 0T4s q4K
� �−βKΔT4s p4K
� �−Y4 y4m;t4
� �h i2dt4;
ð39Þ
where Ts⁎(q⁎K) is the solution of the direct problem at y⁎=ym⁎ byusing estimated q⁎K(t⁎) for exact q⁎(t⁎) at time t⁎. The sensitivityfunction ΔTs⁎(p⁎K) are taken as the solution of Eqs. (14)–(21) at themeasured position y⁎=ym⁎ by letting Δq⁎= p⁎K [7]. The search stepsize βK is determined by minimizing the functional given by Eq. (39)with respect to βK. The following expression can be obtained:
βK =∫t4f
t4 = 0ΔT4s ðp4KÞ½T4s ðq4KÞ−Y4�dt4
∫t4f
t4 = 0½ΔT4s ðp4KÞ�2dt4
: ð40Þ
2.6. Stopping criterion
If the problem contains no measurement errors, the traditionalcheck condition specified as:
J q4K + 1� �
bη; ð41Þ
where η is a small specified number, can be used as the stoppingcriterion. However, the observed temperature data contains mea-
surement errors; as a result, the inverse solution will tend to approachthe perturbed input data, and the solution will exhibit oscillatorybehavior as the number of iteration is increased [12]. Computationalexperience has shown that it is advisable to use the discrepancyprinciple for terminating the iteration process in the conjugategradient method. Assuming Ts⁎(ym⁎ , t⁎)−Y⁎(ym⁎ , t⁎)≅σ, the stoppingcriteria η by the discrepancy principle can be obtained from Eq. (13)as:
η = σ2t4f ; ð42Þ
where σ is the standard deviation of the measurement error. Then thestopping criterion is given by Eq. (41) with η determined fromEq. (42).
3. Results and discussion
The objective of this article is to validate the present approachwhen used in estimating the unknown time-dependent heat flux andtemperature distributions for the system composed of a multi-layercomposite strip and semi-infinite foundation accurately with no priorinformation on the functional form of the unknown quantities, aprocedure called function estimation. In the present study, weconsider the simulated exact value of q⁎(t⁎) as:
q4 t4� �
= 1−e−10t4� �
: ð43Þ
In the present study, we assume the values of material propertiesand the geometric parameters of the system are as follows [3]:
kf = k2 = k3 = k4 = 0:5k1; ρf = ρs; cf = c1 = c2 = c3 = c4; η1 = η2 = 0:5:
A single thermocouple is assumed to be located at the interface(ym⁎=0.0). In terms of the time domain, the total dimensionlessmeasurement time is chosen as tf⁎=1.0 andmeasurement time step istaken to be 0.02. On the other hand, the same computationalprocedure as in Ref. [5] is used in the numerical calculations.
Besides, in the analysis, we do not have a real experimental setup to measure the temperature Y⁎(ym⁎ , t⁎) in Eq. (13). Instead, weassume a real heat flux, q⁎(t⁎) of Eq. (43), and substitute the exactq⁎(t⁎) into the direct problem of Eqs. (1)–(8) to calculate thetemperatures at the location where the thermocouple is placed. Theresults are taken as the computed temperature Yexact⁎ (ym⁎ , t⁎). On theother hand, in reality, the temperature measurements alwayscontain some degree of error, whose magnitude depends upon theparticular measuring method employed. In order to consider thesituation of measurement errors, a random error noise is added tothe above computed temperature Yexact⁎ (ym⁎ , t⁎) to obtain themeasured temperature Y⁎(ym⁎ , t⁎). Hence, the measured temperatureY⁎(ym⁎ , t⁎) is expressed as
Y4ðy4m;t4Þ = Y4exactðy4m;t4Þ + ϖσ; ð44Þ
where ϖ is a random variable within −2.576 to 2.576 for a 99%confidence bounds, and σ is the standard deviation of themeasurement. The measured temperature Y⁎(ym⁎, t⁎) generated insuch way is the so-called simulated measurement temperature.
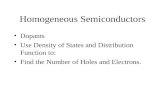
Fig. 2 shows the estimated values of the unknown function q⁎(t⁎),obtained with the initial guesses q⁎0(t⁎)=0.0, temperature mea-surement taken at ym⁎=0.0, and measurement error of deviationσ=0.00 and 0.01, respectively. These results confirm that theestimated results are in very good agreement with those of theexact values. For a temperature of unity and 99% confidence, thatstandard deviation, σ=0.01, corresponds to measurement error of2.58%. The results in Fig. 2 demonstrate that, for the cases consideredin this study, an increase in the measurement error does not cause

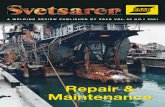
Fig. 4. Estimated temperature distributions T⁎ at 15th iteration with initial guesses q⁎0
(t⁎)=0.0, ym⁎=0.0, and σ=0.01.
Fig. 2. Estimated heat flux q⁎(t⁎) at 15th iteration with initial guesses q⁎0(t⁎)=0.0,ym⁎=0.0, and σ=0.00 and 0.01, respectively.
499Y.-C. Yang et al. / International Communications in Heat and Mass Transfer 37 (2010) 495–500
obvious deterioration on the accuracy of the inverse solution.Meanwhile, in order to investigate the influence of measurementlocation upon the estimated results, Fig. 3 illustrates the estimatedunknown function q⁎(t⁎), with temperature measurement taken atym⁎=0.0 and 0.05, respectively. Here, the initial guesses q⁎0(t⁎)=0.0,measurement error σ=0.01, and satisfactory results are still returnedwhich has proved that different measurement locations pose noinfluence on the accuracy of the present inverse method.
The estimated temperature distributions in the composite stripand semi-infinite foundation for t⁎=0.1, 0.5, and 0.9, respectively,
Fig. 3. Estimatedheat generation q⁎(t⁎) at 15th iterationwith initial guesses q⁎0(t⁎)=0.0,σ=0.01, and ym⁎=0.00 and 0.05, respectively.
are demonstrated in Fig. 4. The results in Fig. 4 are obtained with theinitial guesses q⁎0(t⁎)=0.0, temperature measurement taken atym⁎=0.0, and measurement error of deviation σ=0.01. Theseresults confirm that the estimated temperature values are in verygood agreement with those of the exact values for the caseconsidered in this study. It can be found in Fig. 4 that overall, thetemperature rises rapidly at the outer surface of the composite stripas a consequence of the rapid rise of its internal energy by heat fluxq⁎(t⁎), but it drops sharply as the distance from the outer surfaceincreases.
Fig. 5. Estimatedheat generation q⁎(t⁎) at 15th iterationwith initial guesses q⁎0(t⁎)=0.0,ym⁎=0.0, and σ=0.00 and 0.01, respectively.

500 Y.-C. Yang et al. / International Communications in Heat and Mass Transfer 37 (2010) 495–500
In order to demonstrate the capability of the presented methodologyin obtaining an accurate estimationnomatter howcomplex the unknownfunction is, we consider another case of q⁎(t⁎) with the following form:
q4 t4� �
= 0:3 × sin 2π t4� �
+ 0:25 × sin 4π t4� �
+ 3t4 × 1:1−t4� �h i
:
ð45ÞFig. 5 shows the estimated results of q⁎(t⁎), obtained with the initialguesses q⁎0(t⁎)=0.0, temperature measurement taken at ym⁎=0.0,andmeasurement error of deviation σ=0.00 and 0.01, respectively. Itcan be found in Fig. 5 that an excellent estimation still can be obtainedwith this complex unknown function.
4. Conclusion
An inverse algorithm based on the conjugate gradient method andthe discrepancy principle was successfully applied to estimate theunknown time-dependent heat flux for the system composed of amulti-layer composite strip and semi-infinite foundation, whileknowing the temperature history at some measurement locations.Subsequently, the temperature distributions in the system can becalculated. Numerical results confirm that the method proposedherein can accurately estimate the time-dependent heat flux andtemperature distributions for the problem even involving theinevitable measurement errors.
References
[1] P. Sheng, G. Chryssolouris, Theoretical model of laser grooving for compositematerials, J. Compos. Mater. 29 (1995) 96–112.
[2] J. Matysiak, A.A. Yevtushenko, E.G. Ivanyk, Contact temperature and wear ofcomposite friction elements during braking, Int. J. Heat Mass Transfer 45 (2002)193–199.
[3] A.A. Yevtushenko, M. Rozniakowska, M. Kuciej, Transient temperature processesin composite strip and homogeneous foundation, Int. Commun. Heat MassTransfer 34 (2007) 1108–1118.
[4] Y.C. Yang, T.S. Wu, E.J. Wei, Modelling of simultaneous estimating the laser heatflux and melted depth during laser processing by inverse methodology, Int.Commun. Heat Mass Transfer 34 (2007) 440–447.
[5] W.L. Chen, Y.C. Yang, S.S. Chu, Estimation of heat generation at the interface ofcylindrical bars during friction process, Appl. Thermal Eng. 29 (2009) 351–357.
[6] S.K. Wang, H.L. Lee, Y.C. Yang, Inverse problem of estimating time-dependent heatgeneration in a frictional heated strip and foundation, Int. Commun. Heat MassTransfer 36 (2009) 925–930.
[7] O.M. Alifanov, Inverse Heat Transfer Problem, Springer-Verlag, New York, 1994.[8] W.L. Chen, Y.C. Yang, On the inverse heat convection problem of the flow over a
cascade of rectangular blades, Int. J. Heat Mass Transfer 51 (2008) 4184–4194.[9] W.L. Chen, Y.C. Yang, H.L. Lee, Three-dimensional pipe fouling layer estimation by
using conjugate gradient inverse method, Numer Heat Transfer, Part A 55 (2009)845–865.
[10] Y.C. Yang, W.L. Chen, An iterative regularization method in simultaneouslyestimating the inlet temperature and heat-transfer rate in a forced-convectionpipe, Int. J. Heat Mass Transfer 52 (2009) 1928–1937.
[11] O.M. Alifanov, E.A. Artyukhin, Regularized numerical solution of nonlinear inverseheat-conduction problem, J. Eng. Phys. 29 (1975) 934–938.
[12] O.M. Alifanov, Application of the regularization principle to the formulation ofapproximate solution of inverse heat conduction problem, J. Eng. Phys. 23 (1972)1566–1571.