Estimating MEMS Gyroscope G-Sensitivity Errors in Foot … · 2017-06-27 · navigation, MEMS IMU...
6
Estimating MEMS Gyroscope G-Sensitivity Errors in Foot Mounted Navigation Jared B. Bancroft and Gérard Lachapelle Department of Geomatics Engineering, University of Calgary Calgary, Canada [email protected], [email protected] Abstract—Errors in gyroscope measurements due to linear accelerations are often overlooked in foot mounted navigation systems. Accelerations of foot mounted IMUs can reach 5 g while walking and 10 g while running, but vary depending on the sensors location and mounting. These accelerations are often very short and can induce large biases in the gyro which can produce attitude errors when the measurements are integrated. This paper proposes a real time method for the mitigation of g- sensitivity errors whereby the coefficients are estimated in the navigation Kalman filter. Variations of the estimation scheme are given including estimating the diagonal terms of the 3x3 matrix or all nine elements of the matrix. Accuracy (RMS) improved by 45 % and 61 % in two data sets using two different sensors in different environments. Convergence rates of the estimated variance are also shown. Keywords-g-sensitivity; linear acceleration effect on gyros; pedestrian navigation; foot mounted sensors; GPS denied navigation, MEMS IMU errors. I. INTRODUCTION Errors in rate gyro (i.e. gyroscope) measurements due to linear acceleration are often overlooked in foot and ankle mounted navigation systems. Most commonly known as the g- sensitivity error, it has several other names including the specific force acceleration dependency or linear acceleration effect on gyro bias. Since most consumer and commercial applications have relativity low accelerations (i.e. < 1g), it is an error that is often disregarded within navigation systems since the magnitude is small and often insignificant in comparison to other errors. Current academic literature rarely mentions this source or correction methods. Since accelerations on foot or ankle mounted systems can be higher than most typical consumer applications, the g-sensitivity error requires additional understanding than currently available. Thus, the purpose of this paper is to apply an estimated g-sensitivity correction to a standard foot mounted navigation system to achieve better position accuracy. When inertial units are mounted on feet, ankles or boots, the accelerations achieved are significant, nearing 5 g while walking and 10 g while running. Figure 1 shows a typical acceleration profile of a foot-mounted accelerometer when walking and running. These high accelerations have short durations (typically < 100 ms), but their impact on gyro measurements has become more noticeable as the quality and stability of microelectromechanical systems (MEMS) gyros has improved. Many MEMS gyros state the g-sensitivity’s coefficient maximum value thereby allowing the maximum error to be approximated. For example, a 225 °/hr error could be induced from a 5 g acceleration during heel strike if the data sheet indicated that the coefficient had a maximum value of 45 °/hr/g. When the error is integrated over a short period, such as 25 ms, the single instance error is a mere 0.0016°. However, the accumulation over one hour of regular walking can, for example, lead to a 5.6° error. Thus in order to achieve optimal accuracy, this error needs to be reduced or estimated. Figure 1. Typical Accelerations from an Ankle Mounted IMU while Walking and Running Some key factors that are closely related to the g-sensitivity error are the dynamic range of the gyro and its corresponding scale factor. While running an ankle mounted gyro has angular velocities that often reach 1200 °/s which can generate large scale factors errors. For example, a 540 °/hr error could be induced by a 600 °/s heel strike if the scale factor was 0.025 %. Thus in estimating the g-sensitivity error, it is also important to estimate or at least consider the scale factor error since both errors are generated and closely related by the high dynamics of the human gait. As will be shown herein estimating the g- sensitivity error can significantly improve the navigation solution. The literature regarding the g-sensitivity error and its mitigation is relatively sparse in comparison to other 2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 1
Transcript of Estimating MEMS Gyroscope G-Sensitivity Errors in Foot … · 2017-06-27 · navigation, MEMS IMU...

Estimating MEMS Gyroscope G-Sensitivity Errors in Foot Mounted Navigation
Jared B. Bancroft and Gérard Lachapelle Department of Geomatics Engineering,
University of Calgary Calgary, Canada
[email protected], [email protected]
Abstract—Errors in gyroscope measurements due to linear accelerations are often overlooked in foot mounted navigation systems. Accelerations of foot mounted IMUs can reach 5 g while walking and 10 g while running, but vary depending on the sensors location and mounting. These accelerations are often very short and can induce large biases in the gyro which can produce attitude errors when the measurements are integrated. This paper proposes a real time method for the mitigation of g-sensitivity errors whereby the coefficients are estimated in the navigation Kalman filter. Variations of the estimation scheme are given including estimating the diagonal terms of the 3x3 matrix or all nine elements of the matrix. Accuracy (RMS) improved by 45 % and 61 % in two data sets using two different sensors in different environments. Convergence rates of the estimated variance are also shown.
Keywords-g-sensitivity; linear acceleration effect on gyros; pedestrian navigation; foot mounted sensors; GPS denied navigation, MEMS IMU errors.
I. INTRODUCTION
Errors in rate gyro (i.e. gyroscope) measurements due to linear acceleration are often overlooked in foot and ankle mounted navigation systems. Most commonly known as the g-sensitivity error, it has several other names including the specific force acceleration dependency or linear acceleration effect on gyro bias. Since most consumer and commercial applications have relativity low accelerations (i.e. < 1g), it is an error that is often disregarded within navigation systems since the magnitude is small and often insignificant in comparison to other errors. Current academic literature rarely mentions this source or correction methods. Since accelerations on foot or ankle mounted systems can be higher than most typical consumer applications, the g-sensitivity error requires additional understanding than currently available. Thus, the purpose of this paper is to apply an estimated g-sensitivity correction to a standard foot mounted navigation system to achieve better position accuracy.
When inertial units are mounted on feet, ankles or boots, the accelerations achieved are significant, nearing 5 g while walking and 10 g while running. Figure 1 shows a typical acceleration profile of a foot-mounted accelerometer when walking and running. These high accelerations have short durations (typically < 100 ms), but their impact on gyro measurements has become more noticeable as the quality and stability of microelectromechanical systems (MEMS) gyros has
improved. Many MEMS gyros state the g-sensitivity’s coefficient maximum value thereby allowing the maximum error to be approximated. For example, a 225 °/hr error could be induced from a 5 g acceleration during heel strike if the data sheet indicated that the coefficient had a maximum value of 45 °/hr/g. When the error is integrated over a short period, such as 25 ms, the single instance error is a mere 0.0016°. However, the accumulation over one hour of regular walking can, for example, lead to a 5.6° error. Thus in order to achieve optimal accuracy, this error needs to be reduced or estimated.
Figure 1. Typical Accelerations from an Ankle Mounted IMU while
Walking and Running
Some key factors that are closely related to the g-sensitivity error are the dynamic range of the gyro and its corresponding scale factor. While running an ankle mounted gyro has angular velocities that often reach 1200 °/s which can generate large scale factors errors. For example, a 540 °/hr error could be induced by a 600 °/s heel strike if the scale factor was 0.025 %. Thus in estimating the g-sensitivity error, it is also important to estimate or at least consider the scale factor error since both errors are generated and closely related by the high dynamics of the human gait. As will be shown herein estimating the g-sensitivity error can significantly improve the navigation solution.
The literature regarding the g-sensitivity error and its mitigation is relatively sparse in comparison to other
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 1
gerardlachapelle
Typewritten Text
©2012 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text
gerardlachapelle
Typewritten Text

navigation related gyro errors. The g-sensitivity error is mentioned in [1-4], however no models, error analysis or correction methods are given, especially in regards to a pedestrian navigation system. In developing an inertial measurement unit (IMU) simulator, [5] modeled the g-sensitivity coefficients as random constants. Reference [6] rotated the gyro relative to the gravity vector in order to estimate a linear g-sensitivity model in a calibration process. This paper seeks to extend the knowledge base of the error’s effect and proposes an estimation scheme whereby the error can be reduced. Additional consideration of this error is justifiably warranted.
II. MEASUREMENT ERROR EQUATION
Gyro measurement error equations express the errors contained in these measurements. Within the scope of this paper, we will address the gyro bias, scale factor and non-orthogonalities, g-sensitivity error and noise. Other error sources, such as temperature effects, are neglected given the units tested herein and allow for increased focus on the g-sensitivity error. Often a second order g-sensitivity is modeled in the measurement error equation. However, preliminary results showed very little improvement (if any) in adding an additional 3x3 matrix to the model given the range of accelerations measured (i.e. < 5 g) and this is therefore beyond the scope of this paper.
The measurement error equation can be given as
b b bib g ib g ib gS G ω ω b f η
where bibω is the angular velocity measurement of the
gyroscope, gS is a 3x3 matrix including the scale factors and
non-orthogonalities, gb are the gyro biases, G is a 3x3 matrix
encompassing the g-sensitivity coefficients, bibf is the specific
force and gη is the noise of the gyro measurements. The error
in matrix form is
11 12 13
21 22 23
31 32 33
b
xbib y
z ib
G G G
G G G
G G G
f
ω f
f
In general, gyro biases are often considered to consist of three error genres. First, the manufacturing bias remains constant throughout the life of the unit and is typically estimated in a factory calibration. The second aspect is the turn on bias, which remains constant throughout the powered use of the unit, but varies each time the unit is powered on. The third genre is the in-run bias that fluctuates during the use of the unit. This paper organizes the g-sensitivity errors to follow a similar pattern. Equation (3) separates the g-sensitivity matrix into three components, each a 3x3 matrix:
o s dG G G G
The g-sensitivity coefficients in oG are often estimated in a
factory calibration. These errors are time invariant and do not change throughout the life of the IMU. Second, the static portion of the error is modeled through the
sG coefficients.
These coefficients change each time the unit is powered but remain constant throughout the powered use of the gyro. The third genre is the dynamic change in the coefficients,
dG . This
is the time variant portion of the coefficients. Depending on the quality of the gyro, the magnitude of
dG can be modeled as
a specific process (random walk or Gauss-Markov for example). This remains the most difficult portion of the g-sensitivity to estimate. In calibration tests, this would require long durations of high accelerations to monitor the error and model it.
III. ESTIMATING THE G-SENSITIVITY ERROR
Tests were conducted to show navigation improvement by estimating and removing the g-sensitivity errors. Two sensors from Analog Devices were used. The ADIS16375 [7] six degree of freedom IMU was used in a mountainous hike and the ADIS16488 [8] tactical grade 10 degree of freedom sensor was used in an indoor/outdoor university campus walk. Both sensors sets are higher grade MEMS units. Table 1 provides the gyro specifications used in the tests.
Initial g-sensitivity (oG ) errors were removed at the
factory calibration of the unit. The method and details of the error removal are however proprietary. It is evident from the data sheet and the estimation of the coefficients herein that the static turn on g-sensitivity coefficients (
sG ) and the dynamic
in-run g-sensitivity coefficients (dG ) remain, although given
the estimation scheme herein it is hard to separate the two. For simplicity the static and dynamic portions of the error are simply referred to as the G matrix. The test results indicate that the best model for the coefficient is a random constant. More justification on this is provided in section V.
TABLE I. GYRO SPECIFICATIONS
ADIS16375 ADIS16488
In-run bias stability (°/hr) 12 6.25Angular Random Walk (°/√Hz) 1 0.3
Nonlinearity (ppm) 250 100G-Sensitivity (1σ) (°/hr / m/s2) 4.8 3.3
This paper proposes a three state or a nine state addition to the Kalman filter. Each state represents an element with the G matrix. The three-state addition consists of the diagonal elements of the G matrix, while the nine-state addition consists of all elements of the G matrix. Thus this leads to a 21 or 27 state filter, namely three states for the position, three states for velocity, three states for attitude, six states for gyro and accelerometer biases, three states for gyro scales factors and three or nine states for the g-sensitivity coefficients. Since the
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 2

filter estimates the coefficient, the algorithm is considered to operate in real time, rather than rely on calibration methods.
Adding additional states does reduce the overall observability of the system, the evidence of which is shown in the next section. There is a variety of additional updates to filters to estimate gyro errors (e.g. [9]) which may allow for the nine state addition to be more accurately observed.
The accelerometer and gyro data were processed in a Kalman Filter parameterized in the earth centered earth fixed (ECEF) frame, the basics of which are given in [2]. GPS pseudorange data was only used during the first 10 minutes to provide absolute positions and to allow the states to converge. The Kalman filter states are
1
1
2
0
0
e e
e e e e e e eie b a
e e e b bie b g ib g ib
a a a
g g g
g
cdT
cdT
N F R
R I S G
S
G
cdT cdT
cdT
r v
v r v ε b
ε ε ω b f
b b
b b
where,
er , ev are the ECEF position and velocity vectors,
ε is the perturbation of the Euler angles describing the rotation from the body frame to ECEF frame,
ab , gb are the biases of accelerometer and gyro,
eN , eie ,
eF , ebR
is the tensor of inertia, the skew symmetric from of the earth rotation vector, the skew symmetric form of the specific force measurement and the rotation matrix from the body to ECEF frame, respectively,
,b a ,b g are the time constants used in the Gauss-Markov process model for the accelerometer and gyro biases,
gS is a diagonal 3x3 scale factor matrix,
G is a 3x3 matrix containing the g-sensitivity coefficients and
cdT are GPS receiver clock errors.
The only additions to the standard filter are the g-sensitivity coefficients (either three or nine states). The filter only used
zero velocity updates (ZUPT) and zero angular rate updates (ZARU) as updates to the filter. ZUPTs are detected through hypothesis testing of a 0.05 s (10 epoch) sample variance test statistic. If the test statistic is below a specified threshold and the magnitude of the gravitation field is observed in the magnitude of accelerometer measurements (noise and errors accounted for), a zero velocity update is applied.
Zero angular rate updates were detected in a similar way to ZUPTs, however ZARUs never occurred while walking and were only applied when the test subject was stationary. GPS updates were turned off 10 minutes into the data set to show the improvement in adding the g-sensitivity states, eliminate errors due to GPS observability and multipath and provide realistic accuracies in GPS denied environments.
IV. DATA COLLECTED
Data set one was collected while hiking a mountain. The hike is 3.5 km long, ascends 700 m and took the hiker 84 minutes. The NavCube [10] was used to collect the data. The inertial sensors and GPS antenna were located on the right shank of the hiker, just above the tongue of the hiking boot. Other sensors collected data during the test that are not used in this paper. A filtered GPS solution provided the reference trajectory and provided sufficient accuracy for comparison, despite the evergreen foliage.
Figure 2. Data set one set up with the IMU located on the lower shank.
Data set two is a 45 walk through The University of Calgary campus. It includes time inside and outside, up and down stairs, beside buildings, sub basements and in an open field. The inertial sensor set was mounted on the ankle as was the antenna. To provide a reference trajectory the subject wore a backpack containing a NovAtel SPAN system. The system consisted of a SPAN SE GPS+GLONASS receiver and the tactical grade Northrop Grumman LCI IMU. The reference data was post-processed in NovAtel’s Inertial Explorer in forward and reverse directions, smoothed, and then finally combined.
V. RESULTS OF ESTIMATING THE G-SENSITIVITY ERROR
Inertial navigation processing filters often have several tunable parameters including sensor error models, process noise, zero velocity thresholds, zero angular rate thresholds, etc. In the present case, all processing parameters remained unchanged when processing no g-sensitivity states, three g-sensitivity states and nine g-sensitivity states. The parameters
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 3

are different for each data set however, because each data set used a different sensor.
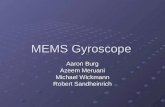
Figure 3 shows the estimation of the diagonal terms of the matrix for data set one. The top half of the figure shows the
estimated coefficients and the bottom graph shows the respective estimated standard deviation. The three coefficients converge within the first 10 minutes, but the estimated variances do not converge as quickly indicating that this error is difficult to observe in the filter. The G33 coefficient (vertical acceleration to vertical angular velocity) estimated standard deviation converges much more rapidly than its counter parts, since the vertical axis contains gravity. This indicates that higher and more frequent accelerations would allow these parameters to be more accurately resolved. Note that the sensor frame has the y axis in the forward direction, the x-axis is to the right and the z-axis is up.
The data also shows time variations of the coefficients. It is unclear whether this is an observability issue or is related to the
dynamic variation of the coefficient itself ( dG ). Since no
process noise is added to the state, the estimation is subject to correlations from the bias and scale factor and their respective variations, ZUPT frequency and most importantly the dynamics experienced.
Figure 3. Estimation of the diagonal g-sensitivity coefficients and their
standard deviations during data set one.
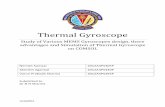
Figure 4 provides the values of the coefficients when nine parameters are estimated. Conclusions similar to those for Figure 3 can be deducted, namely that the parameters converge in the first 10 to 20 minutes and that the estimated standard deviations are also slow to converge. Also the coefficients representing the Z acceleration to X,Y,Z angular velocity errors also converge the fastest and at nearly the same rate due to the presence of gravity in the Z axis.
Figure 4. Estimation of the full g-sensitivity coefficients during data set one.
Figure 5 provides the horizontal and vertical errors when the g-sensitivity corrections are applied and estimated. Both the three and nine parameter algorithms have similar performance in terms of position accuracy. The maximum error after the entire 84 minutes collection period was 1510 m when no g-sensitivity corrections were applied compared to 907 m and 845 m when three and nine state g-sensitivity corrections were applied. This represents a 40 % and 44% improvement. When no corrections were estimated it took 28 minutes to reach the 100 m error threshold. When three g-sensitivity states were estimated it took 44 minutes to reach that threshold and 46 minutes when nine g-sensitivity states were estimated. This translates to a 44 % and 49 % reduction in the RMS error when three and nine state g-sensitivity corrections were applied, respectively. The vertical error remained the same regardless of the processing method.
Figure 5. Position errors as a function of time (i) when no g-sensitivity
corrections are applied, (ii) when the diagonal elements are estimated and applied and (iii) when the full matrix is estimated and applied during data set
one.
The estimation of the g-sensitivity coefficients and their respective standard deviations are shown in Figure 6 for the second data set. This particular data set (or sensor) shows
G
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 4

more dynamic variation in the coefficient despite a faster standard deviation convergence, suggesting a larger time
variation of the coefficient (i.e. 0dG ) as compared to data
set one. The G22 and G33 coefficients appear to have a linear trend.
The magnitudes of the peak accelerations are slightly higher resulting in faster convergence of the coefficients standard deviations. Higher peak accelerations are due to a combination of sensor location and mounting (slightly higher on the shank as compared data set one) and walking on asphalt and concrete as compared to a hiking trail.
Figure 6. Estimation of the diagonal g-sensitivity coefficients and its
standard deviation during data set two.
Figure 7 shows the estimation of the nine elements of the matrix. These results show shorter convergence times than
seen in data set one. However the filter does not estimate the diagonal coefficients to be the same. Also, discontinuities are observed 31 minutes into the data set. This corresponds to a short period where the user is at rest and zero angular updates are applied. This indicates that directly observing the gyro biases through the ZARUs (or by other means) correspondingly affects the g-sensitivity coefficients and consequently indicates a high amount of correlation between the gyro biases and the g-sensitivity coefficients. Since this effect was not observed in the three state diagonal estimation, it shows that the correlation is less significant in the three state version of the filter. This is due to the conservation of information, since the amount of information provided to the filter is constant (same ZUPTs and ZARUs), but is spread throughout more filter states.
Figure 7. Estimation of the full g-sensitivity coefficients during data set two.
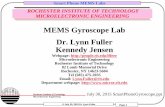
Figure 8 shows a map of the data set and each processing technique and Figure 9 provides the absolute error. Without using any g-sensitivity corrections the solution reaches 50 m error in 18.5 minutes. When using the estimated diagonal terms of the G matrix, it took 33 minutes to reach 50 m error. The nine state g-sensitivity estimation and correction reached 50 m error at 30 minutes.
Final error over the 44 minute test was 263 m with no g-sensitivity correction compared to 103 m when estimating the diagonal terms of g-sensitivity matrix, a 61 % improvement. The vertical error remains completely unaffected by the estimation, just as in test one.
It is clear that the three state version of the filter outperformed the nine state version in data set two. The coefficients estimated were slightly different which resulted in a slightly degraded position. This confirms that estimating the complete matrix is more difficult and requires more information or updates than currently provided. In general, adding the three diagonal states to the filter rather than nine states provides similar performance and requires less processing. If however other information such as another IMU combined with relative updates (e.g. [11, 12]), it is likely that the nine state estimation would outperform the three state estimation.
The modest differences in the position results between data set one and two are attributed to several factors. Firstly, the peak acceleration in data set one is lower than in data set two. This is due to it being mounted on a sock, thereby padding it. This data set also included a steep vertical climb, which resulted in a softer gait at heel strike lowering the jerk at heel strike. In data set two the user walked on concrete and asphalt, which resulted in shorter peak durations but larger peak accelerations. Secondly, variations in ZUPT detection preform differently in the two environments. Thirdly, the sensors are different, although they came from the same manufacturer.
G
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 5

Figure 8. A map view of the three solutions for data set two. Green is the true trajectory, red is processed without the g-sensitivity correction, blue is processed
estimating the diagonal elements of the g-sensitivity correction and purple is estimated using the nine elements of the g-sensitivity correction.
Figure 9. Position errors as a function of time (i) when no g-sensitivity
corrections are applied, (ii) when the diagonal elements are estimated and applied and (iii) when the full matrix is estimated and applied during data set
two.
VI. CONCLUSIONS
A method of estimating the g-sensitivity coefficients in real time by adding them as states to the filter was proposed. Three and nine state additions were used in a standard filter applied to a foot mounted IMU. Inputs included zero velocity updates and stationary zero angular rate updates. In general, 40-60 % improvements were seen in horizontal positions RMS error when the diagonal terms or all nine terms were estimated. The estimated standard deviations of the coefficients converged very slowly given initial starting standard deviations of 1.5 °/hr / m/s2. The benefit of estimating the full nine states was not observed and estimating only the diagonal terms
provided similar results. No change in the vertical errors was observed. The results reported herein are being confirmed by further testing.
REFERENCES [1] P. G. Savage, Strapdown Analytics Part 1, 2nd Edition ed.: Strapdown
Associates Inc., 2007.
[2] P. D. Groves, Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems: Artech House, 2008.
[3] M. S. Grewal, L. R. Weill, and A. P. Andrews, Global Positioning Systems, Inertial Navigation and Integration: John Wiley & Sons 2001.
[4] D. H. Titterton and J. L. Weston, Strapdown Intertial Navigation Technology, 2nd Edition: The Institution of Electrical Engineers, 2004.
[5] Y. Yang, N. El-Sheimy, C. Goodall, and X. Niu, "IMU Signal Software Simulator," in Proceedings of ION NTM 2007 Conference, San Diego, CA, 2007, p. 7.
[6] L. I. Iozan, J. Collin, O. Pekkalin, J. Hautamaki, J. Takala, and C. Rusu, "Measuring the Earth’s Rotation Rate Using a Low-Cost MEMS Gyroscope " in Symposium Gyro Technology, Karlsruhe, Germany, 2010.
[7] Analog Devices, "ADIS16375 Data Sheet (Rev. A)," 2010.
[8] Analog Devices, "ADIS16488 Tactical Grade Ten Degrees of Freedom Inertial Sensor (Rev B)," 2011.
[9] H. Afzal, V. Renaudin, and G. Lachapelle, "Use of Earth's Magnetic Field for Mitigating Gyroscope Errors Regardless of Magnetic Perturbation," Sensors, vol. 11, pp. 11390-11414, 2011.
[10] A. Morrison, V. Renaudin, J. B. Bancroft, and G. Lachapelle, "Design and Testing of a Multi-Sensor Pedestrian Location and Navigation Platform," Sensors, vol. 12, pp. 3720-3738, 2012.
[11] T. Brand and T. Phillips, "Foot-to-Foot Range Measurement as an Aid to Personal Navigation," in 59th Annual Meeting and CIGTF 22nd Guidance Test Symposium, Albuquerque, NM, 2003, pp. 113-121.
[12] J. B. Bancroft, G. Lachapelle, M. E. Cannon, and M. G. Petovello, "Twin IMU-HSGPS Integration for Pedestrian Navigation," in Proceedings of ION GNSS 2008 Conference, Savannah GA, 2008, 11 pages.
2nd International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Service, Helsinki, 2-5 Oct 2012 6