
EpicFlow: Edge-Preserving Interpolation of Correspondences for Optical Flow Jerome Revaud Joint work...
23
EpicFlow: Edge-Preserving Interpolation of Correspondences for Optical Flow Jerome Revaud Joint work with: Philippe Weinzaepfel Zaid Harchaoui Cordelia Schmid Inria
-
Upload
gertrude-melton -
Category
Documents
-
view
223 -
download
1
Transcript of EpicFlow: Edge-Preserving Interpolation of Correspondences for Optical Flow Jerome Revaud Joint work...

EpicFlow:Edge-Preserving Interpolation of Correspondences
for Optical Flow
Jerome Revaud
Joint work with:
Philippe WeinzaepfelZaid HarchaouiCordelia Schmid
Inria
Main remaining problems:► large displacements► occlusions► motion discontinuities
Optical flow estimation is challenging!
2

Optical flow estimation is challenging!
Main remaining problems:► large displacements► occlusions► motion discontinuities
Our approach: « EpicFlow »
Epic: Edge-Preserving Interpolation of Correspondences
► leverages state-of-the-art matching algorithm• invariant to large displacements
► incorporate an edge-aware distance:• handles occlusions and motion discontinuities
► state-of-the-art results
3

Related work:
Variational optical flow [Horn and Schunck 1981]► energy:
Solutions for handling large displacements► Minimization using a coarse-to-fine scheme [Horn’81, Brox’04, Sun’13, ..]
• iterative energy minimization at several scales• displacements are small at coarse scales
► Addition of a matching term [Brox’11, Braux-Zin’13, Weinzaepfel’13, ..]• penalizing the difference between flow and HOG matches
4
color/gradient constancy smoothness constraint

Problems with coarse-to-fine:► flow discontinuities overlap at coarsest scales► errors are propagated across scales► no theoretical guarantees or proof of convergence!
Full-scale estimate Estimation at coarsest scale
Related work: coarse-to-fine minimization
5
Coarsest level (59x26 pixels)1024x436 pixels
EpicFlow

Overview of our approach
Avoid coarse-to-fine scheme
Other matching-based approaches [Chen’13, Lu’13, Leordeanu’13] ► less robust matching algorithms (eg. PatchMatch)► complex schemes to handle occlusions & motion discontinuities► no geodesic distance
66
(SED)
(DeepMatching)

Overview of our approach
7
(DeepMatching)

8
Dense Interpolation
DeepMatching [Weinzaepfel et al. 2013]► 5000 matches / image pair
Does not respect motion boundaries

Assumption:► motion boundaries are mostly included in image edges
contours (SED, [Dollar and Zitnick, 2013])
motion boundaries
Dense Interpolation
9
image
ground-truth flow

Dense Interpolation: edge-aware geodesic distance
Replace Euclidean distance with edge-aware distance to find NNs
Geodesic distance:► Anisotropic cost map =
image edges
► Cost of a path: sum of the cost of all traversed pixels
► Geodesic distance: minimum cost among all possible paths
10
minimum path
q
p

Dense Interpolation: edge-aware geodesic distance
Image edges
Geodesic distance
Geodesic distance
100 closest matches
100 closest matches
Occlusions
Matches

Geodesic distance 100 closest matches
Euclidean distance 100 closest Euclidean matches
Dense Interpolation: edge-aware geodesic distance
Image edgesImage edges
Occlusions
Matches

Approximation► Assign each pixel to its (geodesic) closest match► Compute geodesic distances in a graph of neighboring matches:
~5000 nodes=matches instead of 1M pixel
Dense Interpolation: approximated geodesic distance
13
Contour map Pixel assignementto closest match
Match graph
matchpositions

Variational refinement
One-level variational minimization► initialization = dense interpolation► classic optimization
14

Experimental results: datasets
MPI-Sintel [Butler et al. 2012]
► sequences from a realistic animated movie► large displacements (>20px for 17.5% of pixels)► atmospheric effects and motion blur
15

Experimental results: datasets
KITTI [Geiger et al. 2013]
► sequences captured from a driving platform► large displacements (>20px for 16% of pixels)► real-world lightings, repetitive textures (roads, trees…)
16

Results: with/without refinement
temple_3 42 Cave_2 16 Ambush_5 22
error: 5.7 error: 3.9
error: 5.9 error: 4.2
Ground-truth
EpicFlow(after variational
refinement)
Denseinterpolation(before variational
refinement)

error: 38.9 error: 9.2
error: 10.5error: 52.8
error: 11.8 error: 11.6
error: 5.7 error: 3.9
Ground-truth
EpicFlow
MDP-Flow
LDOF
Classic+NL

Comparison to the state of the art
Average Endpoint Error (lower is better):
Timings:
19
Method Error on MPI-Sintel Error on KITTI Timings
EpicFlow 6.28 3.8 16.4s
TF+OFM 6.73 5.0 ~500s
DeepFlow 7.21 5.8 19s
NLTGV-SC 8.75 3.8 16s (GPU)
DeepMatching (15s)
SED (0.1s)
Interpolation (0.25s)
Variational refinement (1s)
20
Edges Matching MPI-Sintel (train) KITTI (train)
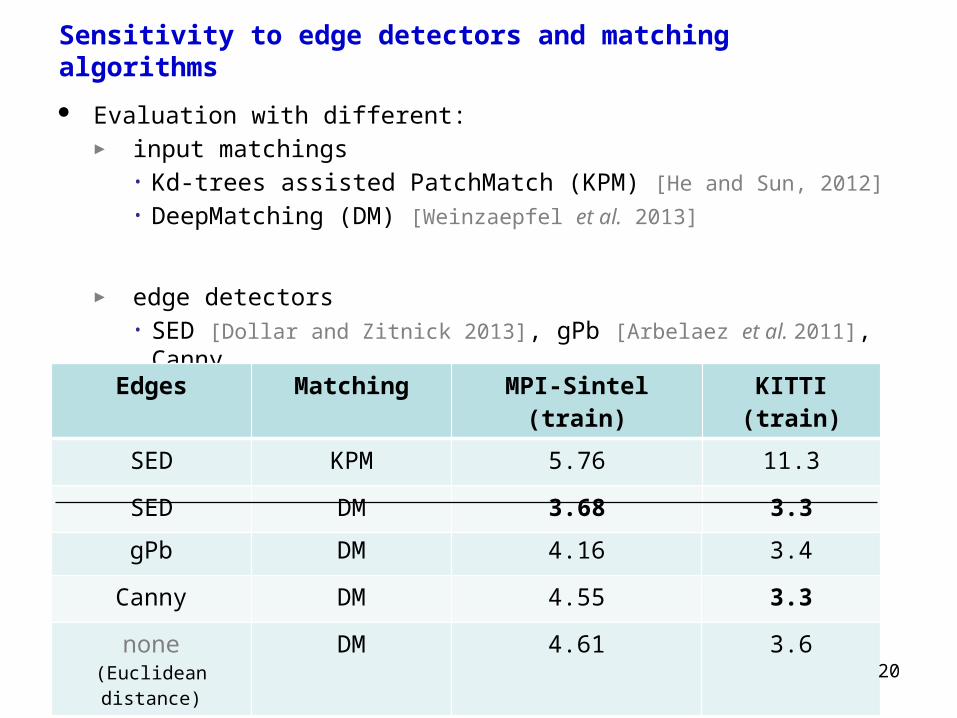
gPb DM 4.16 3.4
Canny DM 4.55 3.3
none(Euclidean distance)
DM 4.61 3.6
Sensitivity to edge detectors and matching algorithms
Evaluation with different:► input matchings
• Kd-trees assisted PatchMatch (KPM) [He and Sun, 2012]
• DeepMatching (DM) [Weinzaepfel et al. 2013]
► edge detectors• SED [Dollar and Zitnick 2013], gPb [Arbelaez et al. 2011], Canny
Edges Matching MPI-Sintel (train) KITTI (train)
SED KPM 5.76 11.3
SED DM 3.68 3.3

Comparison with coarse-to-fine
Experimental protocol:► Same input matching (DeepMatching)► Same input contours (for local smoothness)► Same training set
Average endpoint-error:
More detailed experiments in the paper
21
Method MPI-Sintel (train) KITTI (train) Time
Coarse-to-fine 4.095 4.422 25.0s
EpicFlow 3.686 3.334 16.4s

22
Failure cases
Missing matches Missing contours

Conclusion
Excellent results
Code is available online at http://lear.inrialpes.fr/software
23


![Jerome Revaud Jon Almaz´an Rafael Sampaio de Rezende C ... · Jerome Revaud Jon Almaz´an Rafael Sampaio de Rezende C esar Roberto de Souza´ ... [21,51,59], min-ing hard examples](https://static.fdocuments.in/doc/165x107/5f68324b0689404a4045296d/jerome-revaud-jon-almazan-rafael-sampaio-de-rezende-c-jerome-revaud-jon-almazan.jpg)

![Zaid Harchaoui, Francis Bach, Olivier Cappé, and Éric ...fbach/hbcm_2013_kertest_spm.pdf · IEEE SIGNAL PROCESSING MAGAZINE [88] JULY 2013 not depend on an assumed data distribution.](https://static.fdocuments.in/doc/165x107/5e1c97584d47602512088b75/zaid-harchaoui-francis-bach-olivier-capp-and-ric-fbachhbcm2013kertestspmpdf.jpg)








![Fully-Trainable Deep Matching arXiv:1609.03532v1 [cs.CV] 12 Sep … · 2016-09-13 · arXiv:1609.03532v1 [cs.CV] 12 Sep 2016 {Revaud, Weinzaepfel, Harchaoui, and Schmid} ... (shaded](https://static.fdocuments.in/doc/165x107/5ed3e868b385103868572fa9/fully-trainable-deep-matching-arxiv160903532v1-cscv-12-sep-2016-09-13-arxiv160903532v1.jpg)

![Deep Image Retrieval: arXiv:1604.01325v2 [cs.CV] … › pdf › 1604.01325.pdfarXiv:1604.01325v2 [cs.CV] 28 Jul 2016 2 A. Gordo, J. Almaz an, J. Revaud, D. Larlus retrieval need to](https://static.fdocuments.in/doc/165x107/5f16232d92672d18be492745/deep-image-retrieval-arxiv160401325v2-cscv-a-pdf-a-160401325pdf-arxiv160401325v2.jpg)


