Enumeration Code for the MAX3420E - Maxim IntegratedThe code in this application note goes beyond...
24
AVAILABLE Abstract: The MAX3420E USB controller allows designers to add USB peripheral functionality to any system. Because the MAX3420E provides an SPI interface to its register set rather than containing an onboard microprocessor, a set of MAX3420E C routines can be written to serve a wide variety of processors. This application note presents C code and explains all the functions to accomplish the basic USB operations. Basic USB transfers are explained to help understand the code. Maxim/Dallas > App Notes > INTERFACE CIRCUITS MICROCONTROLLERS Keywords: USB, MAX3420E, MAX3420, C, Enumeration Code Nov 17, 2005 APPLICATION NOTE 3690 USB Enumeration Code (and More) for the MAX3420E Download: Full Code Listing (including bug fix 1 and .h files) (ZIP, 11.6kb) Maxim Integrated 1
Transcript of Enumeration Code for the MAX3420E - Maxim IntegratedThe code in this application note goes beyond...

AVAILABLE
Abstract: The MAX3420E USB controller allows designers to add USB peripheral functionality to any system. Because the MAX3420E provides an SPI interface to its register set rather than containing an onboard microprocessor, a set of MAX3420E C routines can be written to serve a wide variety of processors. This application note presents C code and explains all the functions to accomplish the basic USB operations. Basic USB transfers are explained to help understand the code.
Maxim/Dallas > App Notes > INTERFACE CIRCUITS MICROCONTROLLERS
Keywords: USB, MAX3420E, MAX3420, C, Enumeration Code Nov 17, 2005
APPLICATION NOTE 3690
USB Enumeration Code (and More) for the MAX3420E
Download: Full Code Listing (including bug fix 1 and .h files) (ZIP, 11.6kb)
Maxim Integrated 1

Table Of Contents 1. Introduction....................................................................................................................................... 3
1.1. What the Code Does ................................................................................................................. 3 1.2. About Portability ...................................................................................................................... 5 1.3. wreg() and rreg()....................................................................................................................... 6
2. Initialization...................................................................................................................................... 7 3. Enumeration Traffic.......................................................................................................................... 8
3.1. Anatomy of a Host Request (CONTROL transfer) .................................................................. 9 3.2. USB Flow Control and NAKs ................................................................................................ 10 3.3. STATUS Handshake and the ACKSTAT Bit ........................................................................ 10 3.4. Data Flow Control .................................................................................................................. 11
4. The Program Loop.......................................................................................................................... 12 4.1. Checking for USB Resume..................................................................................................... 13 4.2. Servicing the MAX3420E IRQ Bits ....................................................................................... 16
5. The Heart of Enumeration—Decoding the SETUP Data ............................................................... 17 About Descriptors........................................................................................................................... 18
5.1. Set/Clear Feature .................................................................................................................... 21 5.2. Get Status................................................................................................................................ 22
Device Status Bits:.......................................................................................................................... 22 Interface Status Bits:....................................................................................................................... 22 Endpoint Status Bits: ...................................................................................................................... 22
5.3. Set Interface and Get Interface ............................................................................................... 23 5.4. Set Configuration and Get Configuration............................................................................... 23 5.5. Set_Address ............................................................................................................................ 24 5.6. A Debugging Aid.................................................................................................................... 24
Maxim Integrated 2

1. Introduction
uPMAX3420E
USB
SPI
3,4,5
3.3VRegulator
D+
D-
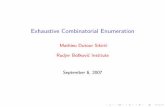
The MAX3420E USB controller allows designers to add USB peripheral functionality to any system. The MAX3420E provides an SPI interface to its register set rather than containing an onboard microprocessor. Consequently, a set of MAX3420E C routines can be written to serve a wide variety of processors. Code portability extends to input- output pins. For example, if you connect a push- button to one of the MAX3420E’s GPI (General- Purpose Input) pins and write your C code to interrogate the button by reading the IOPINS register, the code will run unmodified on any processor regardless of how the processor implements its own IO pins. Much of the programming overhead in a USB peripheral involves the process of enumeration. Specifically, the host detects a plugged-in peripheral, interrogates it to learn about its capabilities and requirements, and if all is well, configures it to bring it on-line. This application note presents a set of C functions that accomplish MAX3420E enumeration. The functions are applicable for any system using the MAX3420E. While a device defines its personality by the data it supplies the host during enumeration, it defines its functionality from its application code. The code in this application note goes beyond enumeration; it adds application code to implement a simple keypad-emulator device that conforms to the standard USB HID (Human Interface Device) class. This approach provides a working application that allows you to test your port of the enumeration code with a PC. Because the code uses the standard USB HID class, it can be tested without needing to install a custom driver on the host PC.
1.1. What the Code Does The code implements a one-button device that acts like a keyboard that conforms to the standard HID class. Plug the device into a USB port, press a button attached to the MAX3420E, and it types the message in Figure 1 into any open window that accepts keyboard data. The code also handles USB bus reset and suspend-resume.
Figure 1. The application code types this text string. USB firmware consists of two parts: USB protocol code and application code. The application code types the string in Figure 1. The code that accomplishes this is listed in Figure 2.
Maxim Integrated 3

void do_IN3(void) if (inhibit_send==0x01) wreg(rEP3INFIFO,0); // send the "keys up" code wreg(rEP3INFIFO,0); wreg(rEP3INFIFO,0); else if (send3zeros==0x01) // precede every keycode with the "no keys" code wreg(rEP3INFIFO,0); // send the "keys up" code wreg(rEP3INFIFO,0); wreg(rEP3INFIFO,0); send3zeros=0; // next time through this function send the keycode else send3zeros=1; wreg(rEP3INFIFO,Message[msgidx++]); // load the next keystroke (3 bytes) wreg(rEP3INFIFO,Message[msgidx++]); wreg(rEP3INFIFO,Message[msgidx++]); if(msgidx >= msglen) // check for message wrap msgidx=0; L0_OFF inhibit_send=1; // send the string once per pushbutton press wreg(rEP3INBC,3); // arm it
Figure 2. The application code for implementing a keyboard device.
When the USB host accepts a data packet from the MAX3420E over endpoint 3, the MAX3420E asserts the interrupt bit IN3BAVIRQ. This tells the SPI master that the endpoint 3 buffer (FIFO) is available for loading new data. The do_IN3() function in Figure 2 examines the flag inhibit_send to determine whether to send the key-up code of three zeros or three data bytes corresponding to the next keystroke. The main program loop checks a send button to update the inhibit_send flag. The function then checks a send3zeros flag to send the 'keys up' code between every keystroke. That is all that there is to the application code. What about the remaining several pages of code in this note? The remaining code performs the overhead required by every USB peripheral. As such, it can be copied/pasted to serve as a framework for any USB peripheral code. Here are the USB overhead operations performed by the code:
1. Recognize and respond to a USB bus reset. 2. Recognize and respond to a USB bus suspend event. 3. Perform device wakeup either by a host resume or a user-initiated RWU (Remote Wakeup)
signal. 4. Recognize host CONTROL transfers and generate the appropriate responses.
Item 4 comprises the bulk of the overhead code. During enumeration the host sends multiple requests to the device asking for descriptors (table data) that define the device operation. Because decoding and responding to the descriptor requests are done exactly the same way for every peripheral device, you can use the code here for this task verbatim in your application. You only need to change a few table data (descriptor) items to give it your device’s personality.
Maxim Integrated 4

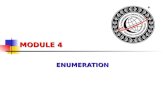
1.2. About Portability
MAXQ2000 uCEvaluation Kit
J2
Daughter Cardw. MAX3420E
P55 P54
INT# MISO SCK MOSI SS#
P56P57P60
USB"B"
GND
GND
VL
54
VL
71,72 56 58 60 62 5,6
J1-19,20 J1-2 J1-4 J1-6 J1-8 J1-10 J2-5,6
Figure 3. This code is written to run with a MAXQ2000 microcontroller evaluation kit.
Figure 3 shows the hardware used to run this example code. Because the MAX3420E can connect to any processor, this application note makes the code as portable as possible. Writing in C achieves most of this portability, but there is an unavoidable portion of the code that will depend on the processor and compiler that you use. The system-dependent portion of the code implements the SPI interface that talks to the MAX3420E. The code in this application note is written to minimize processor-to-processor differences in the following ways:
1. The code does not assume any particular microprocessor interrupt system. Every processor implements interrupts using different registers and vector mechanisms; compilers use different syntax to handle interrupt vectors. Therefore, this code runs a continuous loop that directly polls the MAX3420E INT output pin. In a typical system the INT pin would be wired to a microprocessor interrupt pin, and the code would be modified to be compatible with the method used by the processor and compiler to deal with interrupts.
Note: A good debugging strategy in bringing up a new MAX3420E system uses the polled IRQ bit approach to get things working. Then as a last step, use the INT pin and the microprocessor interrupt mechanism.
2. Bit variables are handled as bit masks. Compilers handle bit variables in different ways. The
most generic and C-portable method is to define bit masks (bmBitName) with only one bit set to 1, and use these bit masks with the C-standard logic operators. The Figure 4 code, for example, shows how to test and clear the bit SUDAVIRQ (Setup Data Available Interrupt Request) in the EPIRQ (Endpoint Interrupt Request) register.
Maxim Integrated 5

#define rEPIRQ 11 #define bmSUDAVIRQ 0x20 unsigned char test; test = rreg(rEPIRQ); // read the register if (test & bmSUDAVIRQ) // test the IRQ bit
wreg(rEPIRQ,bmSUDAVIRQ) // clear the IRQ // (do something)
Figure 4. This code uses the bit mask constant, bmSUDAVIRQ, to test and clear a MAX3420E register bit.
Note: The statement that clears the IRQ demonstrates a MAX3420E feature: to clear an IRQ bit, you write its register with the bit mask. This is because a 1 clears an IRQ register bit, and a 0 does nothing, leaving the remaining IRQ bits in the register alone.
3. The microprocessor- and compiler-specific code appears at the end of the listing. To customize
the code for your particular processor and compiler, you only need to change this section.
4. The enumeration data is in its own file, EnumApp_enum_data.h. The following values require modification for your application:
a. Vendor ID. This code uses the Maxim Vendor ID (VID) of 0x0B6A. Your code should
substitute your own VID. b. Product ID. Replace 0x5346 with your own product ID. c. Serial Number (Device ID). d. String indices and strings unique to your application. e. Configuration and interface values to suit your device (e.g., power requirements,
endpoint numbers and types, class-specific descriptors).
1.3. wreg() and rreg() An SPI master controls the MAX3420E by writing and reading 21 registers over the SPI interface. The code in this application note uses the functions wreg() (write register) and rreg() (read register) to access the MAX3420E registers. Because this code uses a MAXQ2000 microcontroller, these functions manipulate MAXQ2000-specific registers to transfer data over the MAXQ2000’s hardware SPI interface. A more general approach would be to ‘bit bang’ a microprocessor’s general-purpose IO (GPIO) pins to implement the SPI interface. To port this example code to another processor, the rreg() and wreg() functions need to be rewritten to accommodate the processor’s method for implementing an SPI master. The code listing for this application note includes a routine to help test and verify your versions of the rreg() and wreg()functions (Figure 22). The example code also includes a multibyte function called readbytes() which demonstrates how to use the MAX3420E SPI burst mode. In burst mode the SPI master asserts the SS# (slave select) pin, sends the SPI command byte, reads or writes a series of bytes, and finally deasserts the SS# pin. The code also includes a writebytes() function for reference—it is not used by the example code.
Maxim Integrated 6

2. Initialization
void initialize_MAX(void) ep3stall=0; // EP3 inintially un-halted (no stall) (CH9 testing) msgidx = 0; // start of KB Message[] msglen = sizeof(Message); // so we can check for the end of the message inhibit_send = 0x01; // 0 means send, 1 means inhibit sending send3zeros=1; msec_timer=0; blinktimer=0; // software flags configval=0; // at pwr on OR bus reset we're unconfigured Suspended=0; RWU_enabled=0; // Set by host Set_Feature(enable RWU) request // SPI_Init(); // set up MAXQ2000 to use its SPI port as a master // // Always set the FDUPSPI bit in the PINCTL register FIRST if you are using the SPI port in // full duplex mode. This configures the port properly for subsequent SPI accesses. // wreg(rPINCTL,(bmFDUPSPI+bmINTLEVEL+gpxSOF)); // MAX3420: SPI=full-duplex, INT=neg level, GPX=SOF Reset_MAX(); wreg(rGPIO,0x00); // lites off (Active HIGH) // This is a self-powered design, so the host could turn off Vbus while we are powered. // Therefore set the VBGATE bit to have the MAX3420E automatically disconnect the D+ // pullup resistor in the absense of Vbus. Note: the VBCOMP pin must be connected to Vbus // or pulled high for this code to work--a low on VBCOMP will prevent USB connection. wreg(rUSBCTL,(bmCONNECT+bmVBGATE)); // VBGATE=1 disconnects D+ pullup if host turns off VBUS ENABLE_IRQS wreg(rCPUCTL,bmIE); // Enable the INT pin
Figure 5. MAX3420E and program variable initialization.
Figure 5 shows MAX3420E initialization code. The first section initializes several variables used by the program. The variable msgidx is an offset into the text string typed by the application. The SPI_Init() function configures the microprocessor IO pins as an SPI port to talk to the MAX3420E. This example code uses a MAXQ2000 microcontroller, which contains a hardware SPI unit. Therefore, the SPI port initialization is done by writing various MAXQ2000 configuration registers. For a microprocessor without hardware SPI, this routine will simply set the directions and initial states for the GPIO pins used to implement the bit-banged SPI interface. This application uses the MAX3430E full-duplex mode for the SPI port, which employs separate MOSI and MISO pins as shown in Figure 3 above. Since the MAX3420E power-on default is half-duplex, full-duplex operation must be configured by setting the FDUPSPI bit to 1 before reading the SPI port. The PINCTL register also contains a bit called INTLEVEL, which the firmware sets to 1 to configure the MAX3420E INT pin as active-low, level sensitive. Note that in this mode the INT pin is open-drain and must be pulled up to VL, the system interface voltage. For more information on the MAX3420E interrupt system, see application note, The MAX3420E Interrupt System (www.maxim-ic.com/AN3661) on the Maxim website. Next, the function resets the MAX3420E by setting then clearing its CHIPRES bit, and turns off the LEDs attached to the MAX3420E General-Purpose Output (GPO) pins. Finally, the function establishes the USB connection by setting the CONNECT and VBGATE bits in the USBCTL register. The CONNECT bit connects an internal 1500Ω pullup resistor between VCC and D+; the VBGATE bit ensures that the pullup resistor is disconnected from D+ whenever VBUS is not present on the
Maxim Integrated 7

VBCOMP pin. This feature is important in a self-powered design (as is this one), because the peripheral must not power D+ in the absense of VBUS. The macro ENABLE_IRQS is defined as follows: #define ENABLE_IRQS wreg(rEPIEN,(bmSUDAVIE+bmIN3BAVIE)); wreg(rUSBIEN,(bmURESIE+bmURESDNIE)); // Note: the SUSPEND IRQ will be enabled later, when the device is configured. // This prevents repeated SUSPEND IRQ's Enabling the interrupts in a macro allows the operation to be defined in one place and called in two functions: the initialization function and the interrupt function that detects the end of a bus reset. Because a bus reset clears these interrupt enable bits, they need to be reinitialized anytime the host issues a bus reset. Note: Even though the interrupt enable bits associated with USB bus reset (URESIE and URESDNIE) are unaffected by a USB bus reset, it is still convenient to include them in the macro so the interrupt enables can be concentrated in one place in the code.
3. Enumeration Traffic
Figure 6. Bus trace of host requests and the MAX3430E responses.
Maxim Integrated 8

Figure 6 shows USB bus traffic as captured by a LeCroy (formerly CATC) USB bus analyzer. The traces show a PC enumerating the peripheral device that runs the C code in this application note. Before delving into the code, we will make some observations about Figure 6, which will help you understand just what the code does. 1. The host uses the default CONTROL endpoint EP0 (shown in the “ENDP” boxes) to send requests
to the device. The host initially sends requests to address 0 (shown in the ADDR boxes) to communicate with a device to which it has not yet assigned a unique address.
2. Host requests can occur at any time, in any order. Therefore the firmware must always be alert to the SUDAVIRQ (Setup Data Available Interrupt Request).
3. The host begins by sending a Get_Descriptor-Device request (Transfer 0 in Figure 6). It does this to determine the maxPacketSize of the device’s EP0 buffer (for the MAX3420E, it is 64 bytes). The host then resets the device by issuing a bus reset (Packet 83). This activates the MAX3420E USBRESIRQ (USB Bus Reset IRQ) and URESDNIRQ (USB Bus Reset Done IRQ) register bits.
4. In Transfer 1, the host assigns a unique address to the peripheral by using the Set_Address request. The assigned address depends on how many other USB devices are currently attached to the host. In this case, the address assigned to our peripheral device is 3. The MAX3420E handles this request by itself, loading the assigned address into the function address register, FNADDR (R19). Thereafter the MAX3420E responds only to requests directed to address 3. This address remains in force until the host does a bus reset or the device is disconnected. Notice that the peripheral address field (ADDR) in the bus trace changes from 0 to 3 after Transfer 1.
5. In transfers 2 through 13, the host asks for various descriptors. The device firmware needs to determine from the eight setup bytes which descriptor to send, use this information to access one of several character arrays (representing the descriptor arrays), and load those characters into an endpoint FIFO for transmission back to the host.
Figure 7 expands the Figure 6 Transfer 0 to show what is occurring at the packet level.
Figure 7. The Get_Descriptor-Device request expanded to the packet level.
3.1. Anatomy of a Host Request (CONTROL transfer) The CONTROL transfer in Figure 7 comprises three stages, or transactions. The first stage is the SETUP transaction, in which the host sends SETUP packet 61 containing the device address and endpoint, followed by an 8-byte data packet 62 which tells the peripheral what it wants. The transaction ends when the device sends back ACK (Acknowledge) packet 63, telling the host that the
Maxim Integrated 9

transfer occurred without errors. As we will see in the code, the do_SETUP() function retrieves the eight setup bytes from a MAX3420E FIFO called SUDFIFO, which it accesses by reading register R4 eight times. The code then inspects the eight bytes to determine what to do. The last two bytes in data packet 62 indicate a word value that represents the number of bytes the host wants the device to send back. USB is little-endian, so the host is asking for hexadecimal 0x0040 or 64 bytes. However, look at the data stage of this transfer (Transaction 7) where the MAX3420E sends back 18 bytes. The host asked for 64 bytes, but the code only sent back 18. What is happening? The above transaction is a perfectly normal USB occurrence, governed by a simple rule—always send back the smaller of (a) the number of bytes that the host requests, and (b) the number of bytes you actually have. A Device Descriptor contains 18 bytes and the host asked for 64 bytes, so the MAX3420E firmware correctly sent back 18 bytes. Some host requests do not contain a data stage. For example, the Set_Configuration request (Transfer 14 in Figure 6) contains the configuration value in the eight setup bytes. Thus no data stage is required. All CONTROL transfers end with a STATUS stage (Transaction 8 in Figure 7) during which the host sends out an empty OUT packet (no data) just to give the peripheral a chance to provide some feedback. If the peripheral is busy processing the request, it answers with a NAK (Negative ACKnowledge). This tells the host to retry the STATUS stage at a later time, and to keep trying until it gets an ACK (Acknowledge) response.
3.2. USB Flow Control and NAKs The USB architects wisely allowed for wide variation in the processing power of a USB peripheral. The USB host could be talking to a peripheral powered by a 100MHz 32-bit RISC or to an inexpensive mouse chip. To make USB independent of processing power in the peripheral device, the protocol allows the device to return a NAK (Negative Acknowledge) handshake whenever it is busy processing a request. When a device returns NAK, it is telling the host, “I am busy. Ask again later.” In Transaction 8 (Figure 7) the device answers the OUT packet with an ACK handshake. If the device has not finished performing the operation requested by the host, it sends back a NAK response, telling the host to resend the OUT packet at a later time. The host keeps sending the OUT packets until it receives an ACK, at which time the status stage is acknowledged and the host can consider the transfer successfully completed.
3.3. STATUS Handshake and the ACKSTAT Bit The MAX3420E handles this status handshake with a bit called ACKSTAT (R9 bit 6), which stands for ACKnowledge the STATUS Stage of a CONTROL transfer. The firmware decodes the Figure 7 request as Get_Descriptor-Device, looks up its device descriptor, and loads the 18 bytes into the EP0FIFO by writing R0 18 times. Then the firmware writes the EP0BC (Endpoint Zero Byte Count) register R5 with the number 18, which tells the MAX3420E how many bytes to send in Transaction 7. Finally, the firmware sets the ACKSTAT bit in R9, which instructs the MAX3420E to answer the STATUS stage (Transaction 8) with an ACK handshake. Because the ACKSTAT bit is used for every CONTROL transfer, the MAX3420E provides a shortcut for setting it. The first byte of every SPI transfer is a command byte, in which the controller connected to the MAX3420E sends a byte with the format shown in Figure 8.
Maxim Integrated 10

ACKSTATDIR1=wr 0=rd
0Reg0Reg1Reg2Reg3Reg4
b7 b6 b5 b4 b3 b2 b1 b0
Figure 8. The MAX3420E SPI command byte. Bits 7 through 3 set the MAX3420E register address; bit 1 sets the direction, and bit 0 updates the ACKSTAT bit in R9. Therefore, by sending the register address 18 over the SPI bus with the ACKSTAT bit set, you accomplish two things at once: writing the EP0BC (byte count) register to 'arm' the data transfer, and also setting the ACKSTAT bit in R9. This is why there are two versions of the low-level functions that read and write bytes to the MAX3420E: rreg, rregAS, wreg, and wregAS. The AS functions do exactly what the non-AS ones do, but with the ACKSTAT bit set in the SPI command byte.
3.4. Data Flow Control Another USB flow control mechanism is hidden in Figure 7. Sharp-eyed readers will have noticed the gap between Transaction 0 and Transaction 8. This is because Figure 7 used a display option to hide NAKs to make it clearer. (When debugging a USB design, it is usually good to hide NAKs since they clutter the display.)
Figure 9. Figure 7 with NAKs displayed. Figure 9 shows that it took the firmware some time to understand the request, look up the right descriptor, stuff the EP0 FIFO with 18 bytes, and write the byte count. Actually, it took six NAKs worth of time. How did the MAX3420E know to return the NAK handshake while the firmware was doing all this? It is quite simple: the MAX3420E automatically returns the NAK handshake for an IN request to an endpoint until the firmware loads the byte count register for that endpoint. This arms the
Maxim Integrated 11

endpoint to transfer data and the MAX3420E responds to the next IN request (Transaction 7) with the requested data instead of a NAK handshake.
4. The Program Loop
void main(void)
initialize_MAX();
while(1) // endless loop
if(Suspended)
check_for_resume();
if (MAX_Int_Pending())
service_irqs();
msec_timer++;
if(msec_timer==TWENTY_MSEC)
msec_timer=0;
if((rreg(rGPIO) & 0x10) == 0) // Check the pushbutton on GPI-0
inhibit_send = 0x00; // Tell the "do_IN3" function to send the text string
L0_ON // Turn on the SEND light
blinktimer++; // blink the LOOP ACTIVE light every half second
if(blinktimer==BLINKTIME)
blinktimer=0;
L3_BLINK
// msec_timer==ONE_MSEC
// while(1)
// main
Figure 10. The main program loop executes forever.
The main() function in Figure 10 is structured to mimic an interrupt-driven program, while still independent of any particular processor’s interrupt system. After initializing the MAX3420E, it enters an endless while(1) loop. Every pass through the loop, it makes two function calls:
1. If the bus is suspended, it calls check_for_resume() to detect a host-initiated or user-initiated resume operation.
2. If any MAX3420E interrupts are pending, it services them with a call to service_irqs(). The possible interrupts for this application are:
a. Setup Data arrived (SUDAVIRQ). b. The host requested keyboard data by sending a data request to EP3-IN. c. The host suspended the bus by stopping traffic for three milliseconds. d. The host initiated a bus reset. e. The host completed bus reset signaling.
The MAX_Int_Pending() function polls the MAX3420E INT pin and returns a 1 value if the pin is found to be low. Although not elegant, this direct polling of the INT pin makes the code independent
Maxim Integrated 12

of the microcontroller. In a final application, after the code is verified to run properly, it is a small step to activate the microcontroller interrupt mechanism to which the MAX3420E INT pin connects. The main program loop executes every 20 milliseconds, and does the following:
1. Reads the state of the ‘send’ pushbutton, and clears the inhibit_send flag if the button is pressed.
2. Blinks a ‘loop active’ light every half-second. The code communicates with the MAX3420E using two functions called wreg (write register) and rreg (read register). These microprocessor-dependent functions are included at the end of the full listing. The register names are prefixed with ‘r’ (e.g., rUSBIRQ) and the bit masks are prefixed with ‘bm’ (e.g., bmBUSACTIRQ). MAX3420E register and bit equates are in the included MAX3040E.h file. This file also includes some handy macros. The code uses, for example, macros (shown in all caps) L2_BLINK and L3_ON to manipulate the LEDs attached to the GPOUT pins. The macros allow easy modification of the code if the circuitry changes. For example, if your application uses active-low LEDs, you only need to change the macros while leaving the code alone. The half-second blink timer is implemented using a software loop which needs fine-tuning for your particular implementation. The constants TWENTY_MSEC and BLINKTIME can be adjusted to account for your processor clock speed. In a final application you probably would use a microcontroller’s hardware timer unit to count off the half seconds.
4.1. Checking for USB Resume About USB Suspend-Resume A USB host suspends a device by stopping USB signaling for three milliseconds. A USB peripheral is required to sense this suspend indication and assume a low-power state than draws very little current from the VBUS wire. The MAX3420E activates its SUSPIRQ (Suspend IRQ) bit to indicate a host-suspend operation. Once suspended, a device can wake up two ways. First, the host can simply resume bus signaling. This activates the MAX3420E BUSACTIRQ (Bus Active IRQ) bit. Second, if the peripheral is capable of signaling remote wakeup and the host has enabled it to do so, the device can drive a resume signal on the bus by using the SIGRWU bit. The MAX3420E asserts an interrupt bit called RWUDNIRQ (Remote Wakeup Done IRQ) to alert the SPI master that it has completed the RWU signaling. Note: In the suspended state, a bus-powered peripheral completes power-down operations by putting the MAX3420E to sleep. It does this by setting the bit PWRDOWN = 1. This stops the MAX3420E on-chip oscillator. The code in this note implements a self-powered peripheral, and therefore, does not take this step.
Maxim Integrated 13

void check_for_resume(void) if(rreg(rUSBIRQ) & bmBUSACTIRQ) // THE HOST RESUMED BUS TRAFFIC L2_OFF Suspended=0; // no longer suspended else if(RWU_enabled) // Only if the host enabled RWU if((rreg(rGPIO)&0x40)==0) // See if the Remote Wakeup button was pressed L2_OFF // turn off suspend light Suspended=0; // no longer suspended SETBIT(rUSBCTL,bmSIGRWU) // signal RWU while ((rreg(rUSBIRQ)&bmRWUDNIRQ)==0) ; // spin until RWU signaling done CLRBIT(rUSBCTL,bmSIGRWU) // remove the RESUME signal wreg(rUSBIRQ,bmRWUDNIRQ); // clear the IRQ while((rreg(rGPIO)&0x40)==0) ; // hang until RWU button released wreg(rUSBIRQ,bmBUSACTIRQ); // wait for bus traffic -- clear the BUS Active IRQ while((rreg(rUSBIRQ) & bmBUSACTIRQ)==0) ; // & hang here until it's set again...
Figure 11. This function checks for USB resume from two sources: the host and RWU pushbutton.
The check_for_resume() function in Figure 11 tests for two ways to wake up a suspended device:
1. The host resumes traffic on the bus. 2. The user presses the ‘Remote Wakeup’ button attached to the MAX3420E GPIN2 pin.
The first if statement handles a host-resume operation. The IRQ bit called bmBUSACTIRQ (Bus Active IRQ) asserts when the MAX3420E detects bus traffic. This code merely turns off the suspend light (L1), and clears the suspended flag. The else if block handles remote wakeup (RWU). For remote wakeup to be enabled, a few conditions need to be satisfied:
1. The device reports that it is capable of signaling RWU in its configuration descriptor, as shown in Figure 12.
unsigned char CD[]= // CONFIGURATION Descriptor 0x09, // bLength 0x02, // bDescriptorType = Config 0x22,0x00, // wTotalLength(L/H) = 34 bytes 0x01, // bNumInterfaces 0x01, // bConfigValue 0x00, // iConfiguration 0xE0, // bmAttributes. b7=1 b6=self-powered b5=RWU supported 0x01, // MaxPower is 2 ma
Figure 12. The peripheral tells the host that it is capable of signaling remote wakeup in bit 5 of the bmAttributes byte of its CONFIGURATION descriptor.
2. The host issues a Set_Feature-RWU request.
Maxim Integrated 14

Figure 13. Bus trace for host suspend-resume. Figure 13 is a USB bus trace showing a PC entering its suspend state as a result of the user pressing the sleep button on the PC keyboard. In transfers 62 and 63, the host sends its periodic INTERRUPT-IN requests, and the keyboard (our keypad emulator application) returns the required three bytes. The host prepares for USB suspend by first sending the peripheral a Set_Feature request with the feature selector set to DEVICE_REMOTE_WAKEUP in transfer 64. If the device had not previously reported that it is capable of signaling a device remote wakeup, the host would never send this request. 11.087 seconds later (packet 3869) the PC user hits a keyboard key or moves the mouse, or the user presses the remote wakeup button on the peripheral device. This wakes up the PC, which then proceeds to wake up the peripheral in packet 3870. The host clears the remote wakeup feature in transfer 65. Transfer 66 is a HID request called Set_Idle. If the device does not support this feature (the code here does not need this feature), the correct response is the STALL handshake. Finally, starting with transfer 67, the host continues sending IN packets to endpoint 3 to periodically request keypad data. Note: A STALL handshake does not actually stall operation of the USB peripheral. The USB architects could have chosen a less foreboding sounding name for this handshake.
Maxim Integrated 15

4.2. Servicing the MAX3420E IRQ Bits
void service_irqs(void)
BYTE itest1,itest2;
itest1 = rreg(rEPIRQ); // Check the EPIRQ bits
itest2 = rreg(rUSBIRQ); // Check the USBIRQ bits
if(itest1 & bmSUDAVIRQ)
wreg(rEPIRQ,bmSUDAVIRQ); // clear the SUDAV IRQ
do_SETUP();
if(itest1 & bmIN3BAVIRQ)
do_IN3();
if((configval != 0) && (itest2&bmSUSPIRQ)) // HOST suspended bus for 3 msec
wreg(rUSBIRQ,(bmSUSPIRQ+bmBUSACTIRQ)); // clear the IRQ and bus activity IRQ
L2_ON // turn on the SUSPEND light
L3_OFF // turn off blinking light (in case it's on)
Suspended=1; // signal the main loop
if(rreg(rUSBIRQ)& bmURESIRQ)
L1_ON // turn the BUS RESET light on
wreg(rUSBIRQ,bmURESIRQ); // clear the IRQ
if(rreg(rUSBIRQ) & bmURESDNIRQ)
L1_OFF // turn the BUS RESET light off
wreg(rUSBIRQ,bmURESDNIRQ); // clear the IRQ bit
Suspended=0; // in case we were suspended
ENABLE_IRQS // ...because a bus reset clears the IE bits
Figure 14. This function checks the IRQ bits needed by this application.
The service_irqs() function in Figure 14 checks four MAX3420E IRQ bits for a USB event that requires service. These four events and their interrupt request bit names are:
1. bmSUDAVIRQ A SETUP packet arrived. The host controls a device by sending SETUP packets.
2. bmIN3BAVIRQ The host asked for another data packet from the HID keyboard. It uses endpoint 3-IN for this request. BAV means Buffer Available.
3. bmURESIRQ The host started signaling a bus reset. 4. bmUSBRESDNIRQ The host finished signaling a bus reset.
Although the MAX3420E has a total of 14 IRQ bits, only these four are needed in the main loop to run the keypad-emulator application. The function first reads the two MAX3420E IRQ registers and saves their values in the variables itest1 and itest2. Then it checks itest1 for one of two endpoint interrupts: endpoint 0 for SETUP data and endpoint 3-IN for a request to send keyboard data. If satisfied, these tests call the service function,
Maxim Integrated 16

do_SETUP() or do_IN3(). Note that while the do_SETUP() branch clears the requesting IRQ bit, the do_IN3() branch does not. To send IN data, you clear the IRQ bit by writing the IN endpoint’s byte count register, never by directly clearing the bit. This mechanism prevents a competing race situation where you could be loading IN FIFO data at the same time the USB IN transfer is occurring. The remaining checks inspect the itest2 value for USB signaling events. The MAX3420E asserts the SUSPIRQ bit when it detects the lack of bus activity for three milliseconds. If the SUSPIRQ bit is set, the function sets the suspended flag to tell the main loop that the host has suspended the bus. The suspend code also turns off the blinking light and turns on a suspend light. Note: The suspend light is fine for a self-powered device. If, however, your application is bus powered (drawing power from the VBUS wire), you probably do not want an LED adding current to the limited suspend current budget. The last two checks handle USB bus reset. These code sections clear the IRQ bits and turn a bus reset light on and off. Note that MAX3420E code should always include a test for a USB bus reset. This is because the MAX3420E clears most of its interrupt enable register bits during a USB bus reset. Therefore, the code should be alert to a bus reset. When the reset is complete (signaled by the USBRESDN IRQ), it should re-enable the interrupts that it is using for the application.
5. The Heart of Enumeration—Decoding the SETUP Data Figure 15 is the function call that handles a SETUP transfer request. The main loop calls this function whenever the MAX3420E asserts the SUDAVIRQ bit.
void do_SETUP(void)
readbytes(rSUDFIFO,8,SUD); // got a SETUP packet. Read 8 SETUP bytes
switch(SUD[bmRequestType]&0x60) // Parse the SETUP packet. For request type, look only at b6&b5
case 0x00: std_request(); break;
case 0x20: class_request(); break; // just a stub in this program
case 0x40: vendor_request(); break; // just a stub in this program
default: STALL_EP0 // unrecognized request type
void do_SETUP(void)
Figure 15. First enumeration step is to decode the request type.
The readbytes function takes three arguments: first, a MAX3420E register from which to read data (in this case, the Setup Data FIFO “SUDFIFO”); second, the number of bytes to read; and third, a pointer to a byte array to store the bytes. The switch statement looks at the first SETUP byte (bmRequestType) to determine the request type. Most enumeration requests are standard requests. If the device implements a standard USB class (such as HID), there may also be requests unique to that class. Vendor requests are custom requests defined by the peripheral maker. The default statement shows how USB decoding functions should end. If no legal case value is found, the correct peripheral
Maxim Integrated 17

response is to send the STALL handshake instead of ACK or NAK to indicate that it failed to recognize the request. In this example code, the class_request and vendor_request functions are empty. They are included here just to show where to put the hooks if you need to implement either of these functions. The function shown in Figure 16 services the standard USB requests.
void std_request(void) switch(SUD[bRequest]) case SR_GET_DESCRIPTOR: send_descriptor(); break; case SR_SET_FEATURE: feature(1); break; case SR_CLEAR_FEATURE: feature(0); break; case SR_GET_STATUS: get_status(); break; case SR_SET_INTERFACE: set_interface(); break; case SR_GET_INTERFACE: get_interface(); break; case SR_GET_CONFIGURATION: get_configuration(); break; case SR_SET_CONFIGURATION: set_configuration(); break; case SR_SET_ADDRESS: rregAS(rREVISION); break; default: STALL_EP0
Figure 16. Second step is to figure out which request.
The std_request() function checks for valid descriptor types in the bRequest byte of the SETUP data packet. The ‘SR_’ names in the switch statement correspond to the nomenclature in Chapter 9 of the USB Specification, which defines the USB standard requests and data formats. The bulk of the USB compliance testing involves checking this part of your code to ensure that your device properly responds to the requests defined in Chapter 9. The SET_FEATURE and CLEAR_FEATURE requests are served by a single feature() function that takes an argument indicating which operation, set (1) or clear (0), is required. The SET_ADDRESS request does nothing but set the ACKSTAT bit by doing a dummy read to the REVISION register. This is because the MAX3420E hardware automatically handles the Set_Address request. The remainder of the enumeration code consists of the seven functions called in Figure 16. The first one, send_descriptor(), is the big one. The others are quite simple.
About Descriptors Our application uses the following USB descriptor types.
• Device • Configuration
o Interface - (HID) - Endpoint
• String
Maxim Integrated 18

• (Report) The include file EnumApp_enum_data.h contains the various descriptors used to give our peripheral device its personality. A USB device can have multiple configurations and interfaces, but our application uses only one of each. The descriptors in parenthesis above are unique to the HID class, and would be omitted by a non-HID device. Note: A configuration descriptor contains interface and endpoint descriptors. The host never asks for an interface or endpoint descriptor by name. It knows that it will retrieve these descriptors as part of the configuration descriptor.
void send_descriptor(void) WORD reqlen,sendlen,desclen; BYTE *pDdata; // pointer to ROM Descriptor data to send // // NOTE This function assumes all descriptors are 64 or fewer bytes and can be sent in a single packet // desclen = 0; // check for zero as error condition (no case statements satisfied) reqlen = SUD[wLengthL] + 256*SUD[wLengthH]; // 16-bit switch (SUD[wValueH]) // wValueH is descriptor type case GD_DEVICE: desclen = DD[0]; // descriptor length pDdata = DD; break; case GD_CONFIGURATION: desclen = CD[2]; // Config descriptor includes interface, HID, report and ep descriptors pDdata = CD; break; case GD_STRING: desclen = strDesc[SUD[wValueL]][0]; // wValueL=string index, array[0] is the length pDdata = strDesc[SUD[wValueL]]; // point to first array element break; case GD_HID: desclen = CD[18]; pDdata = &CD[18]; break; case GD_REPORT: desclen = CD[25]; pDdata = RepD; break; // end switch on descriptor type // if (desclen!=0) // one of the case statements above filled in a value sendlen = (reqlen <= desclen) ? reqlen : desclen; // send the smaller of requested and avaiable writebytes(rEP0FIFO,sendlen,pDdata); wregAS(rEP0BC,sendlen); // load EP0BC to arm the EP0-IN transfer & ACKSTAT else STALL_EP0 // none of the descriptor types match
Figure 17. This function decodes and sends the requested descriptor.
The file EnumApp_enum_data.h contains byte arrays for the various descriptors that give the USB device its personality. The send_descriptor function in Figure 17 checks the SETUP bytes in the SUD[8] array to determine the requested descriptor type and length. It loads the pointer *pData with the address of the requested descriptor, figures out how many bytes to send, and sends them.
Maxim Integrated 19

The send_descriptor function uses two variables to determine the number of bytes to send: the requested length, reqlen; and the actual descriptor length, desclen, which it retrieves from the descriptor tables. The function starts by setting desclen = 0. If desclen is still zero after all the descriptor-type checks are complete, a valid descriptor type was not found and the function sends the STALL handshake. The requested lengths are found in the wLengthL and wLengthH bytes of the SUD array. After loading this 16-bit value into the reqlen variable, the function uses a switch statement to check for various values of wValueH, which indicates the descriptor type. The GD_CONFIGURATION test has an important comment. This function assumes that all descriptors fit into one packet, and therefore can be handled with one call to the send_descriptor function. The MAX3420E implements a 64-byte FIFO for endpoint 0, which is the maximum size allowed for a full-speed device. Therefore, all descriptor data fits into a single packet since no descriptor is larger than 64 bytes. A more complex device could contain descriptors that exceed 64 bytes. In that case this routine should be modified both to use the full 16-bit length value (as shown in the comment), and to make multiple calls to the send_descriptor function. The rest of the function is straightforward, as the case statements determine the descriptor type, set a pointer to the desired descriptor data, and load the desclen variable with the descriptor length. What may not be obvious is that the descriptor length values are found in various places in the descriptor tables. Device and string descriptors contain their length in the first byte of the descriptor. The device descriptor length, for example, is in the byte DD[0]. The configuration descriptor has its length in the second and third bytes, and this length includes the summed lengths of the configuration descriptor, the HID descriptor (if present), and all the endpoint descriptors.
Coding is somewhat convoluted in the HID descriptors. The CONFIGURATION descriptor contains the 9-byte HID descriptor at CD[18]. Inside the HID descriptor is the length of the REPORT descriptor used by the HID class device. (REPORTS are data messages sent and received by HID peripherals.) So when the Figure 17 function is asked to provide the REPORT descriptor, it furnishes the address at RepD (the report descriptor address) and the length from CD[25], that is the report descriptor length inside the HID descriptor which is inside the CONFIGURATION descriptor.
This is a little confusing, but it is all in the USB and HID specs. Once you understand it, you never need to do it again. Following the switch statement, the function sends the proper descriptor or the STALL handshake if it did not recognize one of the defined USB descriptors. It sets the sendlen variable to the smaller of the requested and available lengths, writes this number of bytes into the EP0FIFO, and, finally, loads the byte count into the EP0BC register using the wregAS() function. Loading the byte count does the following:
1. Arms EP0 to transfer the data when the host sends this endpoint the next IN token. 2. Sets the ACKSTAT bit to tell the MAX3420E to answer the next control transfer handshake
with ACK, indicating that it has finished servicing the request.
Maxim Integrated 20

5.1. Set/Clear Feature
void feature(BYTE sc) BYTE mask; if((SUD[bmRequestType]==0x02) // dir=h->p, recipient = ENDPOINT && (SUD[wValueL]==0x00) // wValueL is feature selector, 00 is EP Halt && (SUD[wIndexL]==0x83)) // wIndexL is endpoint number IN3=83 mask=rreg(rEPSTALLS); // read existing bits if(sc==1) // set_feature mask += bmSTLEP3IN; // Halt EP3IN ep3stall=1; else // clear_feature mask &= ~bmSTLEP3IN; // UnHalt EP3IN ep3stall=0; wreg(rCLRTOGS,bmCTGEP3IN); // clear the EP3 data toggle wreg(rEPSTALLS,(mask|bmACKSTAT)); // Don't use wregAS--directly writing the ACKSTAT bit else if ((SUD[bmRequestType]==0x00) // dir=h->p, recipient = DEVICE && (SUD[wValueL]==0x01)) // wValueL is feature selector, 01 is Device_Remote_Wakeup RWU_enabled = sc<<1; // =2 for set, =0 for clear feature. The shift puts it in the get_status bit position. rregAS(rFNADDR); // dummy read to set ACKSTAT else STALL_EP0
Figure 18. Set Feature and Clear Feature requests.
The Figure 18 function handles both Set_Feature and Clear_Feature requests. The calling routine sets the sc argument to 1 for set and 0 for clear. The host sends feature requests that apply to the device or to an endpoint. For a full-speed device, one feature request is defined for each recipient:
• Endpoint: Halt • Device: Remote Wakeup
The function first checks for the valid combination of setup bytes that define an endpoint halt request. When the host halts an endpoint, the peripheral is required to return the STALL handshake for any request to that endpoint until the host clears the halt condition. To accomplish this, the MAX3420E has a register called EPSTALLS, which includes bits for each MAX3420E endpoint. The only action required for an endpoint halt is to set one of these MAX3420E STALL bits. The host removes an endpoint halt condition by sending the Clear_Feature (Endpoint Halt) request. In this case the firmware first clears that endpoint’s STALL bit, which restores the endpoint to normal operation, and then clears that endpoint’s data toggle to DATA0. The MAX3420E register CLRTOGS allows any endpoint’s toggle bit to be set to zero. Note that this is the only time that the firmware needs to be concerned with an endpoint toggle bit. The MAX3420E automatically takes care of the data toggles and verifications during normal USB transfers.
Maxim Integrated 21

5.2. Get Status
void get_status(void) BYTE testbyte; testbyte=SUD[bmRequestType]; switch(testbyte) case 0x80: // directed to DEVICE wreg(rEP0FIFO,RWU_enabled+1); // first byte is 000000rs // where r=enabled for RWU and s=self-powered. wreg(rEP0FIFO,0x00); // second byte is always 0 wregAS(rEP0BC,2); break; // load byte count, arm the IN transfer, // ACK the status stage of the CTL transfer case 0x81: // directed to INTERFACE wreg(rEP0FIFO,0x00); // this one is easy--two zero bytes wreg(rEP0FIFO,0x00); wregAS(rEP0BC,2); break; // load byte count, arm the IN transfer, // ACK the status stage of the CTL transfer case 0x82: // directed to ENDPOINT if(SUD[wIndexL]==0x83) // We only reported ep3, so it's the only one // the host can stall. IN3=83 wreg(rEP0FIFO,ep3stall); // first byte is 0000000h where h is the halt bit wreg(rEP0FIFO,0x00); // second byte is always 0 wregAS(rEP0BC,2); break; // load byte count, arm the IN transfer, // ACK the status stage of the CTL transfer else STALL_EP0 // Host tried to stall an invalid endpoint (not 3) default: STALL_EP0 // don’t understand the request
Figure 19. Get Status request.
The get_status function in Figure 19 first decodes that portion of the USB peripheral to which the request is directed: device, interface, or endpoint.
Device Status Bits • Currently self-powered. Because our device is self-powered, the LSB of the status byte is
always 1. • Currently enabled for remote wakeup (RWU). The code maintains a flag for RWU_enabled,
which is set by a Set_Feature request, cleared by a Clear_Feature request, and which becomes the returned RWU status bit.
Interface Status Bits There are no currently defined interface status bits. The function simply returns two zero bytes.
Endpoint Status Bits One endpoint status bit is defined, endpoint halt. The host halts an endpoint by sending the Set_Feature(Endpoint halt) request, and clears an endpoint halt by sending the Clear_Feature(Endpoint halt) request. The endpoint status request simply returns the internal flag, ep3stall, in the first byte, and a zero second byte. Since only one data endpoint is used in this design, the function checks the wIndexL field for endpoint 3-IN (0x83) and, if it does not find it, stalls the request. Note: The endpoint number in wIndexL contains a direction bit in its MSB. 1 is IN; 0 is OUT. Therefore, EP3-IN is 0x83, not 0x03. This little detail provided the author many happy debugging hours.
Maxim Integrated 22

5.3. Set Interface and Get Interface
void set_interface(void) // All we accept are Interface=0 and AlternateSetting=0,
// otherwise send STALL
BYTE dumval;
if((SUD[wValueL]==0) // wValueL=Alternate Setting index
&&(SUD[wIndexL]==0)) // wIndexL=Interface index
dumval=rregAS(rFNADDR); // dummy read to set the ACKSTAT bit
else STALL_EP0
void get_interface(void) // Check for Interface=0, always report AlternateSetting=0
if(SUD[wIndexL]==0) // wIndexL=Interface index
wreg(rEP0FIFO,0); // AS=0
wregAS(rEP0BC,1); // send one byte, ACKSTAT
else STALL_EP0
Figure 20. Set Interface and Get Interface requests.
As Figure 20 shows, the set_interface and get_interface functions are simple for this application because this device reports only a single interface (index 0) and a single alternate setting value (= 0). In a more complex design, the code would save the alternate setting value and reconfigure the endpoints to match the alternate setting any time the host changes it with a set_interface request. Then the get_interface function would return the current alternate setting value rather than zero.
5.4. Set Configuration and Get Configuration
void set_configuration(void)
configval=SUD[wValueL]; // Store the config value
if(configval != 0) // If we are configured,
SETBIT(rUSBIEN,bmSUSPIE); // start looking for SUSPEND interrupts
rregAS(rFNADDR); // dummy read to set the ACKSTAT bit
void get_configuration(void)
wreg(rEP0FIFO,configval); // Send the config value
wregAS(rEP0BC,1);
Figure 21. Set Configuration and Get Configuration requests.
The host configures a device using the Set_Configuration request with a value of 1. The Figure 21 code updates the variable configval to the value sent by the Set_Configuration request, and returns this
Maxim Integrated 23

value for the Get_Configuration request. When the device is configured, the code enables the SUSPEND interrupt to start checking for a bus suspend. If the suspend interrupt were enabled when the device is initialized, an unplugged or unconfigured device would cause the MAX3420E to repeatedly assert the SUSPEND IRQ.
5.5. Set_Address This is the simplest request of all: no code. The MAX3420E takes care of this. It automatically updates an internal FNADDR register with the new address, and subsequently responds only to requests directed to that address. All the code needs to do is set the ACKSTAT bit to terminate the request.
5.6. A Debugging Aid The code in Figure 22 is a debug aid to check your versions of the rreg() and wreg () functions that read and write the MAX3420E registers over the SPI port. For more debugging help, check the Maxim website for the application note, Bringing Up a MAX3420E System (www.maxim-ic.com/AN3663).
//
// Diagnostic Aid:
// Call this function from main() to verify operation of your SPI port.
//
void test_SPI(void) // Use this to check your versions of the rreg and wreg functions
BYTE j,wr,rd;
SPI_Init(); // Configure and initialize the uP's SPI port
wreg(rPINCTL,bmFDUPSPI); // MAX3420: SPI=full-duplex
wreg(rUSBCTL,bmCHIPRES); // reset the MAX3420E
wreg(rUSBCTL,0); // remove the reset
wr=0x01; // initial register write value
for(j=0; j<8; j++)
wreg(rUSBIEN,wr);
rd = rreg(rUSBIEN);
wr <<= 1; // Put a breakpoint here. Values of 'rd' should be 01,02,04,08,10,20,40,80
Figure 22. Call this function and step through it to verify your rreg and wreg functions.
Maxim Integrated 24