
Enter Dept name in Title Master Preliminary Design Review AAPS Automated Aero-Painting System Team...
23
enter Dept name in Title Master Preliminary Design Review AAPS Automated Aero-Painting System Team Members: Adib Khozouee Chris Brennan Edmar Gonçalves Ejiroghene Urhiafe Advisors: Csaba Andras Moritz Roderic Grupen
-
date post
19-Dec-2015 -
Category
Documents
-
view
214 -
download
1
Transcript of Enter Dept name in Title Master Preliminary Design Review AAPS Automated Aero-Painting System Team...

enter Dept name in Title Master
Preliminary Design Review
AAPS Automated Aero-Painting
System
Team Members:Adib Khozouee Chris BrennanEdmar GonçalvesEjiroghene Urhiafe
Advisors: Csaba Andras Moritz Roderic Grupen

2enter Dept name in Slide Master
Background and Motivation
Unmanned Aerial Vehicles (UAV) revolutionizing aviation technology• Do not require qualified pilot on board• Reduces exposure risk of the aircraft operator• Flight time of up to 30 hours, performing raster scan of
a region, in darkness or fog, under computer control• Can enter environments that are dangerous to human
life• Can be programmed to complete a mission
autonomously• Automation reduces inspection and maintenance costs,
and improves flight readiness
Source: http://www.uavs.org/advantages ECE Department, UMass Amherst, Fall 2011

3enter Dept name in Slide Master
Background and Motivation (cont’d)
UAV usage: Military operations
• Espionage• Sabotage• Combat
Agriculture: spray fertilizer and pesticide over large fields NASA’s planetary science planning on using UAVs for space
missions Weather research Coast watch Search and rescue Hobbyist activities Newest application: Painting
ECE Department, UMass Amherst, Fall 2011

4enter Dept name in Slide Master
Challenge and Requirements
UAV automation reliability• Prioritize potential concerns and take preemptive action• Make real time decisions based on input sensors• Communicate with base processing unit• Adjust flight goals to functional and environmental
limitations Graffiti Copter system
• Flight guidance• Painting surface recognition• Feedback on its functional state• Assess task performance
ECE Department, UMass Amherst, Fall 2011

5enter Dept name in Slide Master
General System Flowchart
ECE Department, UMass Amherst, Fall 2011

6enter Dept name in Slide Master
System ProcessInitial set-up
ECE Department, UMass Amherst, Fall 2011
Base station
Quadrocopter
Canvas
IR camera
Base processing unit

7enter Dept name in Slide Master
System Process Step 1: Wall Calibration
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Quadrocopter
Canvas
Base processing unit

8enter Dept name in Slide Master
System Process Step 2: Quadrocopter Take-off
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Canvas
Base processing unit

9enter Dept name in Slide Master
System ProcessStep 3: Reaching Canvas
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Canvas
Base processing unit
10enter Dept name in Slide Master
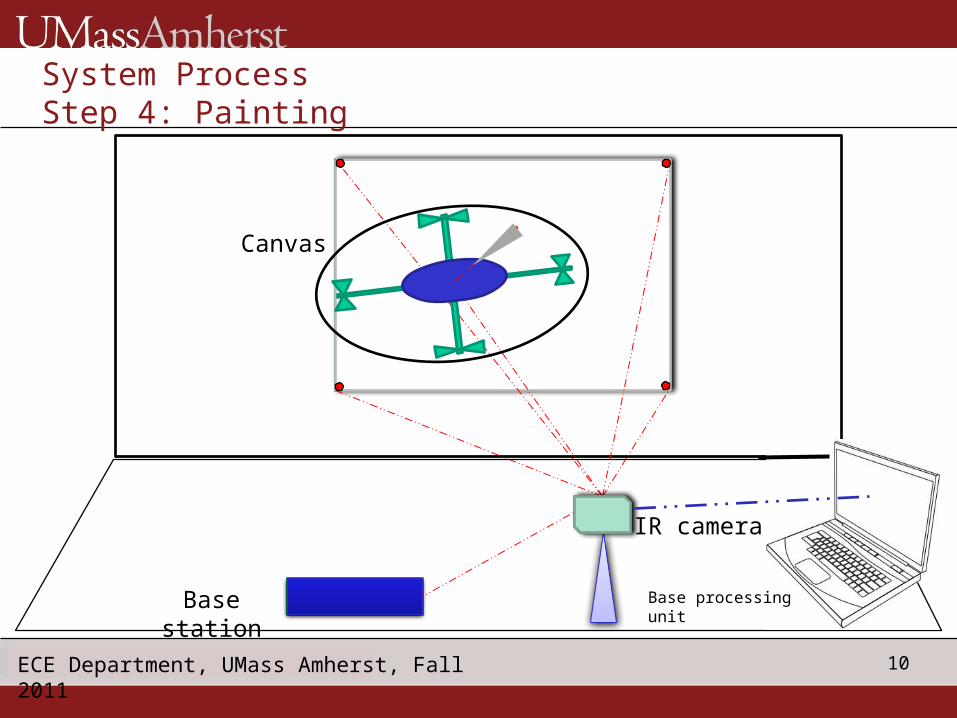
System ProcessStep 4: Painting
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Canvas
Base processing unit

11enter Dept name in Slide Master
System ProcessStep 5: Image Comparison
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Canvas
Base processing unit

12enter Dept name in Slide Master
System ProcessStep 6: Landing
ECE Department, UMass Amherst, Fall 2011
IR camera
Base station
Quadrocopter
Canvas
Base processing unit

13enter Dept name in Slide Master
Function Flow Chart - Quadrocopter
ECE Department, UMass Amherst, Fall 2011

14enter Dept name in Slide Master
Function Flow Chart - Base Processing Unit
ECE Department, UMass Amherst, Fall 2011

15enter Dept name in Slide Master
Nozzle placement
ECE Department, UMass Amherst, Fall 2011

16enter Dept name in Slide Master
Performance Measures
Accuracy
Complexity
Real-time Position Awareness Algorithm (RPAA)
Canvas Calibration
ECE Department, UMass Amherst, Fall 2011

17enter Dept name in Slide Master
Parts
Quadrocopter kit: 670g, $529
Xbee Receiver / transmitter: (3g, free from M5)
Aduino microcontroller ATmega 328 (~227g free from M5)• Or Intel Atom processor if finalist in Cornell Cup (free)
ECE Department, UMass Amherst, Fall 2011

18enter Dept name in Slide Master
Parts
Battery • Option 1: 14.8V, 5000mAh, 545 g, $81• Option 2: 14.8V, 3200mAh, 386 g, $63
Spray Cans 245 g, $7
Spray Can holster (parts from SDP lab)
Camera: ps3 camera (free from m5)
ECE Department, UMass Amherst, Fall 2011

19enter Dept name in Slide Master
Costs
Quadrocopter kit $529 Battery $81 Spray Can $7 Spray Can Holster Free Xbee Receiver/Transmitter Free Aduino Free Camera Free --------------------------------------------- Total $617
ECE Department, UMass Amherst, Fall 2011

20enter Dept name in Slide Master
Funding Ideas
Cornell Cup Competition• Embedded design competition presented by Intel• If we become finalists we will receive:
• $2,500• Intel Atom Processors
Ask companies for donations if we advertise that we used their products
Personal investments
ECE Department, UMass Amherst, Fall 2011

21enter Dept name in Slide Master
Weight CalculationBattery 1 Battery 2
Quadrocopter kit 670 g 670 g Battery 545 g 386 g Spray Can 247 g 247 g Xbee Receiver/Transmitter 3 g 3 g Aduino 227 g 227 g Spray Can Holster 0-508 g 0-767 g---------------------------------------------------------------------- Total 1692-2200 g 1433-2200 g
ECE Department, UMass Amherst, Fall 2011
22enter Dept name in Slide Master
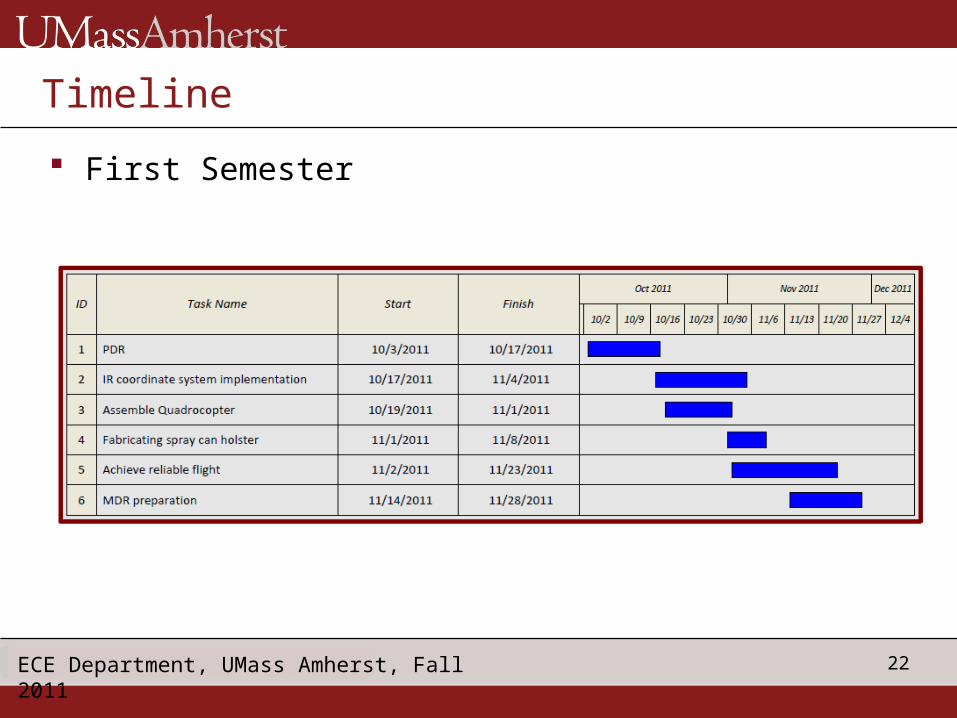
Timeline
First Semester
ECE Department, UMass Amherst, Fall 2011

23enter Dept name in Slide Master
MDR Deliverables
Quadrocopter capable of achieving flight
Camera able to virtualize physical canvas
ECE Department, UMass Amherst, Fall 2011


















