
Engineered mit TIA Portal SIMATIC S7-1500 T-CPU · 2018-07-18 · Frei verwendbar © Siemens AG...
127
siemens.de/t-cpu Frei verwendbar © Siemens AG 2018 Engineered mit TIA Portal SIMATIC S7-1500 T-CPU Technologieworkshop Seite 1
Transcript of Engineered mit TIA Portal SIMATIC S7-1500 T-CPU · 2018-07-18 · Frei verwendbar © Siemens AG...

siemens.de/t-cpu Frei verwendbar © Siemens AG 2018
Engineered mit TIA Portal
SIMATIC S7-1500 T-CPU Technologieworkshop
Seite 1

Frei verwendbar © Siemens AG 2018
Tagesablauf
Technologieworkshop
Einführung in Motion Control 2
Pause 3
Vorführung: Anlegen TO Axis, Steuertafel, Diagnose, PLCopen Bausteine 4
Hands On 1 + 2: Grundinbetriebnahme, Konfiguration TO Axis, Verfahrprogramm 5
Mittagspause 6
Theorie und Vorführung: Taktsynchronität, TO Messtaster 7
Hands On 3: Positionieren über Messtaster 8
Vorstellung: Advanced Motion-Control Funktionen, Kurvenscheibe 9
Pause 10
Hands On 4+5: Absoluter Gleichlauf „Fliegender Säge“ und „Presse mit Vorschub (Kurvenscheibe)“ 11
Zusammenfassung, Abschluss 12
Begrüßung, Ausblick auf Workshop 1 09:00 – 09:30
09:30 – 10:15
10:15 – 10:30
10:30 – 10:45
10:45 –12:00
12:00 – 12:45
12:45 – 13:15
13:15 – 14:00
14:00 – 14:45
14:45 – 15:00
15:00 – 16:15
16:15 – 16:45
9:00 – 17:00
Offene Fragen, Verabschiedung 13 16:45 – 17:00
Seite 2 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Ausblick auf Workshop
Ziel dieses Technologieworkshops
Projektierung SINAMICS V90 PN über HSP
Grundinbetriebnahme SINAMICS T-CPU
Basic Motion Control Functions
Advanced Motion Control Functions
SINAMICS V90 PN 2-Achs Koffer
S7-1500T V90 PN
Seite 3 Technologie-Workshop 2018
SIMATIC S7-1515T CPU
SINAMICS V90 PN +
SIMOTICS 1FL6 Motoren
ET 200SP mit TM Timer
Modul
E/A-Feld für Bedienung
des Anwederprogramms
Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SINAMICS V90 PN & SIMOTICS 1FL6 2
Technologieobjekte für Motion Control 3
Seite 4 Technologie-Workshop 2018
Technische Details 4
Support / Infos 5
Februar 2018

SIMATIC S7-1500 T-CPU Überblick Motion Control
siemens.de/t-cpu
Februar 2018 Technologie-Workshop 2018 Seite 5

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SINAMICS V90 PN & SIMOTICS 1FL6 2
Technologieobjekte für Motion Control 3
Seite 6 Technologie-Workshop 2018
Technische Details 4
Support / Infos 5
Februar 2018

Frei verwendbar © Siemens AG 2018
Advanced Controller – SIMATIC S7-1500 T-CPU
Ergänzende Motion Control-Funktionen mit TIA Portal V15 und Firmware V2.5 *)
SIMATIC S7-1500 T-CPUs
• CPU 1511T, CPU 1511TF,
CPU 1515T, CPU 1515TF,
CPU 1516T, CPU 1516TF,
CPU 1517T, CPU 1517TF
• Standard-, Safety-SPS und Motion
Control auf einem Controller
Hardwareinnovationen
Konsistente und nahtlose
Erweiterung von S7-1500 zur
S7-1500 T-CPU
Programmierung
Diagnoseseiten für Motion Control
Webserver
Kinematikfunktionen
• Ansteuerung von Kinematiken mit
bis zu 4 interpolierenden Achsen
Getriebe- und
Kurvenscheibengleichlauf
• Mit Vorgabe der Synchronposition
der Leit- und Folgeachse
• Sollwertkopplung
• Istwertkopplung mit Extrapolation
Motion Control-Funktionen
Kurvenscheibeneditor
Kinematik-Konfigurator / Kinematik-Trace
Integrierte Editoren und Viewer
*) im Vergleich zur Standard-CPU
Seite 7 Technologie-Workshop 2018
NEW
NEW
NEW
Februar 2018

Frei verwendbar © Siemens AG 2018
Überblick
Warum Motion Control in einer CPU?
Motion Control und Umrichter
ersetzen mechanische Komponenten
Einfachere Konstruktion und Montage
Höhere Flexibilität bei Anpassungen
Zentrale Bewegungsführung
Bessere Dynamik
Einfachere Wartung / Geringerer Verschleiß
Nocken- steuerwerk
Getriebe Kupplung Hauptantrieb Kurven- scheibe
Motion Control
Funktionen
Servo-Antriebe
Mech
atr
on
isch
e L
ösu
ng
M
ech
an
isch
e
Lö
su
ng
Virtuelle
Leitachse
Mechatronische Lösungen zur Erfüllung der steigenden Anforderung hinsichtlich Produktivität und Flexibilität
Seite 8 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Performance (TIA Portal V15)
Advanced Controller – SIMATIC S7-1500 T-CPU
Überblick im Vergleich zum Standard Controller
Seite 9
Mo
tio
n C
on
tro
l-F
un
kti
on
ali
tät
1) Aufsynchronisieren mit Vorgabe der Synchronposition 2) Aufsynchronisieren ohne Vorgabe der Synchronposition
Technology
Standard
abs
.
rel.
CPU 1511 CPU 1513 CPU 1515 CPU 1516 CPU 1516T CPU 1517 CPU 1518
5 7 55 70 128
10 30 80 128 128
SIMATIC S7-1500 Controller Software
Controller
…
Drehzahlsteuerung
Positionieren
Nocken / Messtaster
Getriebegleichlauf 2) (relativ)
Kurvenscheibengleichlauf
Getriebegleichlauf 1) (absolut)
Anzahl
Positionierachsen
in 4 ms bei 35 % CPU-Last
maximal
FW V2.5
FW V2.5
Kinematikfunktionen
NEW
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Advanced Controller – SIMATIC S7-1500 T-CPU
Eingebettet im skalierbaren Motion Control-Portfolio
Seite 10
Verteilter Gleichlauf
Kinematikfunktionen mit Conveyor tracking
Kinematikfunktionen
Kurvenscheiben-/ Getriebegleichlauf 1)
Getriebegleichlauf 2)
Nocken
Messtaster
Positionieren
Drehzahl steuern
Basic Midrange High-End
1) Aufsynchronisieren mit Vorgabe der Synchronposition 2) Aufsynchronisieren ohne Vorgabe der Synchronposition
Basic
Controller
Standard CPU
Advanced
Controller
Standard CPU
T Advanced
Controller
T-CPU
Engineered mit TIA Portal
SIMOTION
Motion
Controller
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Advanced Controller – SIMATIC S7-1500
Identische Basis Motion Control-Funktionalität in jeder CPU
Seite 11 Technologie-Workshop 2018
1511 1513 1515 1516
1517 1518
1510SP
1512SP 1507S* S7-1500
Software Controller
Skalierbar im Mengengerüst und Performance
1511T/TF 1515T/TF
1517T/TF 1516T/TF
NEW
1515SP PC2 ET 200SP
Open Controller
* ablauffähig auf IPC4x7D, IPC6x7D und IPC8x7D
Februar 2018

SIMATIC S7-1500 T-CPU SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN
(TIA Portal integrated engineering)
siemens.de/t-cpu
Februar 2018 Technologie-Workshop 2018 Seite 13

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 14 Technologie-Workshop 2018
Technische Details 4
Support / Infos 5
Februar 2018

Frei verwendbar © Siemens AG 2018
SINAMICS S210 Servoantriebssystem; Positionierung innerhalb
des SINAMICS “Discontinuous Motion” Servo Portfolios
Seite 15
Basic: SINAMICS V90
Servo Drive System
Basis Einachs AC/AC Servo Drive
mit Standard Funktionalität für
einfache Motion-Control-Aufgaben
High end: SINAMICS S120
Servo Drive
Modulares DC/AC Mehrachs
System mit integrierter, Umrichter
basierender, Motion Control
Funktionalität für High End
Anwendungen
Midrange: SINAMICS S210
Servo Drive System
Einachs AC/AC
Servoantriebssystem mit hoher
Performanz und Dynamik für
Motion Control Anwendungen im
Midrange Segment.
NEW
Februar 2018 Technologie-Workshop 2018

Frei verwendbar © Siemens AG 2018
Top Highlights SINAMICS S210 & SIMOTICS S-1FK2
Das neue Mid-Range Servoantriebssystem
Seite 16
*) Volle Integration in Vorbereitung
**) Einschränkungen siehe PMD
Feature / Funktion Nutzen
• SIMOTICS S-1FK2 Motor
(Compact oder High Dynamic)
• PROFINET IRT (250 µs)
• Erhöht die
Performance
• Safety Integrated-Funktionen
über PROFIsafe
• Erfüllt höchste
Anforderungen
an die Sicherheit
• Integrierter Webserver
• “One Button Tuning”
• TIA Portal (über GSD)*)
• Vereinfachte
Inbetriebnahme
• One-Cable-Connection (OCC)
• Integrierter C2 EMV-Filter
• Spart Zeit bei
der Installation
• 1AC 230V (200-240V) 0,05 - 0,75kW
• UL Zertifizierung
• Für verschie-
denste Märkte
einsetzbar **)
High
Dynamic
Februar 2018 Technologie-Workshop 2018

Frei verwendbar © Siemens AG 2018
Technische Daten SINAMICS S210
(6SL3210-5H…)
SIMOTICS S-1FK2
(1FK21…) HD
(1FK22…) CT
Einkabelanschluss
(6FX5002-8QN...)
(6FX8002-8QN...)
• Spannung: 1AC 200 – 240 V
• Leistung: 50/100 W – 750 W
• PN IRT (250 µs), Strom-
regler 62,5 µs, PROFIsafe
• Safety-Funktionen: STO,
SS1, SBC, ext. Safety*): SS1,
SS2, SOS, SLS, SSM, SDI,
SBT
• Abnehmbare Klemmen
• Dicht-an-dicht-Montage
• 300 % Überlast
• Integriertes EMV-Filter C2
• Integrierter Bremswiderstand
• DI: 1 F-DI (2 DI),
2 DI für Messfühler
• integrierter WEB-Server
• Drehmoment: 0,16– 2,4 Nm
• Leistung: 50W-750W
• Hoch dynamisch (HD) oder
kompakt (CT) in Achshöhe
20, 30, 40 mm
• Geber: 20 bit absolut
Single oder Multiturn
• Schutzart: IP64,
optional IP65
• Glatte Welle oder Passfeder
• Mit oder ohne Haltebremse
• Auch für den Einsatz in
Nordamerika (cURus)
• Individuelle Kabellängen bis
zu 50m bestellbar
• SPEED-CONNECT Schnell-
verschluss mit drehbarem
Anschlussstecker
• Flexible Leitungen mit engen
Biegeradien
• Kabelvariante für
Schleppkette verfügbar
• Kleine und kompakte M12
Stecker für Motor
AH20/30mm (nur 25mm
hoch)
• Verlängerungskabel und
Schrankdurchführung
verfügbar
SINAMICS S210 Servoantriebssystem
Systemübersicht
Seite 17
*)in Vorbereitung
Februar 2018 Technologie-Workshop 2018

Frei verwendbar © Siemens AG 2018
Das skalierbare SINAMICS-Umrichterportfolio
für „Discontinuous Motion“
Pe
rfo
rma
nce
un
d A
ntr
ieb
sfu
nk
tio
ne
n
V90
+ 1FL6
S210 + 1FK2
S120 / S120M + 1FK7, 1FT7 , 1PH8, 1FG1, 2
2 + weitere Motoren 1 in Vorbereitung
Basic Mid-Range High-End
projektiert mit TIA Portal
Mehrachsantriebe, Direktantriebe
DCC / TEC
DC-Kopplung1
Startdrive-Integration1
+ Webserver
Safety: STO über Klemme
PROFINET, ser. Komm., z. B. Modbus, PTI
Integration in TIA Portal
Basic u. erweiterte Safety1 inkl. PROFIsafe
Energierückspeisung
Servoregelung
Seite 18 Februar 2018 Technologie-Workshop 2018

Frei verwendbar © Siemens AG 2018
SINAMICS V90 PN 200V System SINAMICS V90 PN 400V System
SINAMICS V90 mit PROFINET und SIMOTICS S 1FL6
Feste Kombination von Antrieb und Motor
V90
200V FSB FSC FSD
100W 200W 400W 750W 1KW 1.5KW 2KW
V90
400V FSAA FSA FSB FSC
400W 750W 1KW 1.5KW 2KW 3.5KW 5KW 7KW
1FL6 Hi
Motor SH45 SH65 SH90
400W 750W 750W
1KW
1.5KW 1.75KW
2KW
2.5KW
3.5KW
5KW 7KW
1FL6 Li
Motor SH20 SH30 SH40 SH50
50W 100W 200W 400W 750W 1KW 1.5KW 2KW
Seite 19 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC
S7-1500
SIMATIC
S7-1500 T-CPU
TIA Portal
Advanced Controller & SINAMICS V90 mit PROFINET
Nahtlose TIA Portal Integration
oder
SINAMICS
V90 mit PN
• V90 mit PN: Integriert im TIA Portal (HSP)
• Antriebs Engineering in “3 Klicks”
• Automatische Antriebs-Voreinstellung
• One-button Auto-Tuning
• etc.
=> Perfektes
Zusammenspiel im
System
Seite 20 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Motion Control mit SIMATIC S7-1500 T-CPU ‒ SINAMICS V90 PN
TIA Portal-Integration ‒ Wichtige Hinweise
Lage- und Drehzahlregelung von V90 PN ist über Motion-Technologieobjekte des Typs Achse von
SIMATIC S7-1500 möglich
Unterstützte PROFIdrive Telegrammtypen: 1, 2, 3, 5 (DSC), 102, 105 (DSC und Standardtelegrammtyp)
Installation von V90 PN über zusätzliches Hardware Support Package (HSP 0185) des TIA Portal ab Version V14
Kein zusätzliches Engineering-Tool notwendig!
Der Gerätetyp V90 PN für die integrierte Konfiguration von Hardware und Netzwerk im TIA Portal
sowie das zugehörige Engineering sind enthalten.
STEP 7 Professional muss installiert sein (da SIMATIC S7-1500 benötigt wird).
Das im TIA Portal integrierte Engineering von SINAMICS V90 PN kann nur in Zusammenhang
mit einem Motion-Technologieobjekt (TO) innerhalb der SIMATIC S7-1500 über PROFINET erfolgen!
Seite 22 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Überblick
SINAMICS Portfolio – Schnittstelle: PROFINET
S-Reihe
High End
G-Reihe
Standard
Höchste Dynamik
Asynchron- und Synchronmotoren
Taktsynchronität + DSC
Mittlere Dynamik
Asynchronmotoren
Keine Taktsynchronität
Eigenschaften Typ Beispiel
V-Reihe
Basic
V90 & S-1FL6
Hohe Dynamik
Synchronmotoren
Mit PROFINET
Taktsynchronität + DSC
Startdrive
STARTER
V-Assistant
Inbetriebnahmesoftware
Startdrive
STARTER
TIA Portal
NEU
mit: S7-1500(T); PN; TO
ab V14 + HSP 0185
Seite 23 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Motion Control mit SIMATIC S7-1500 T-CPU ‒ SINAMICS V90 PN
TIA Portal-Integration ‒ Einige Screenshots
Geräte & Netzwerk-Sicht
• Im TIA Portal
• Automatische Telegrammkonfiguration und Technologie-
Einstellung
Parameter des Antriebs
• Es gibt nur ein paar und die sind alle vorkonfiguriert
• Online-Sicht wie SIMATIC und Vergleich zum Projekt
Schneller Start und Betrieb für Motion Control
Seite 24 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SINAMICS V90 PN
Überblick technische Daten
Technische Daten
Netzspannung
1/3 AC 200 V ~ 240 V
(-15 %/+10 %)
50/60 Hz, (-10 % / +10 %)
3 AC 200 V ~ 240 V
(-15 % / +10 %)
50/60 Hz, (-10 % / +10 %)
3 AC 380 V ~ 480 V
(-15 % / +10 %)
50/60 Hz, (-10 % / +10 %)
Leistungsbereich 0,05 kW ~ 0,75 kW 1 kW ~ 2 kW 0,4 kW ~ 7 kW
Überlastfähigkeit 300 %
Regelungsart
Lage- und Drehzahlregelung in Zusammenhang mit einem Motion-Technologieobjekt
(TO Achse) von SIMATIC S7-1500 und PROFINET
Unterstützte PROFIdrive Telegrammtypen: 1, 2, 3, 5 (DSC), 102, 105 (DSC;
Standardtelegramm)
Steuerungs-
merkmale
Selbstoptimierung (Ein-Tasten-Selbstoptimierung), Resonanzunterdrückung,
Drehmomentgrenzwert, Drehzahlgrenzwert
Bremswiderstand Integriert für alle Modelle
Schutzklasse IP20
Sicherheit Sicher abgeschaltetes Moment (Safe Torque Off - STO) über Klemme
Normen CE, C-tick, cULus (nur Antrieb, 1FL6-Motoren sind nicht UL-zertifiziert)
Digitalein-/-
ausgänge Nicht unterstützt
Kommunikation PROFINET (IO-Device, RT/IRT, Zykluszeit ab 2 ms)
SINAMICS V90 PN
PROFINET (RT / IRT)
Auto Tuning (one-button auto tuning)
PN-IRT SINAMICS V90 PN
Servo Drive
1FL6 Servo Motor
SIMATIC
S7 15xxT-CPU PN
Biss / TTL
Seite 25 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SINAMICS V90 PN
TIA Portal-Integration
Das im TIA Portal integrierte Engineering von SINAMICS V90 PN erfolgt nur in Zusammenhang mit
einem Motion-Technologieobjekt innerhalb der SIMATIC S7-1500 über PROFINET!
Installation von V90 PN über Hardware Support Package (HSP 0185)
Kein zusätzliches Engineering-Tool notwendig!
Der Gerätetyp V90 PN für die integrierte Konfiguration von
Hardware und Netzwerk im TIA Portal
sowie das zugehörige Engineering sind enthalten.
Lage- und Drehzahlregelung über Technologieobjekt Achse
Unterstützte PROFIdrive Telegramme: 1, 2, 3, 5 (DSC), 102, 105 (DSC) TLG 105 voreingestellt
Seite 27 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Aufgabe: TIA Portal Projekterstellung und
Grundkonfiguration des Demokoffers.
Vorgehen: Erstellen Sie die Hardwarekonfiguration,
testen und optimieren Sie die Antriebe.
L I V E D E M O
Seite 28 Technologie-Workshop 2018 Februar 2018
Projekterstellung & Antriebskonfiguration
Parametrierung und Inbetriebnahme

Frei verwendbar © Siemens AG 2018
Aufgabe: TIA Portal Projekterstellung und
Grundkonfiguration des Demokoffers.
Vorgehen: Erstellen Sie die Hardwarekonfiguration,
testen und optimieren Sie die Antriebe.
Übung 1
Seite 29 Technologie-Workshop 2018 Februar 2018
Projekterstellung & Antriebskonfiguration
Parametrierung und Inbetriebnahme

Frei verwendbar © Siemens AG 2018
Mobile workshop
Network structure
Seite 30 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Mobile workshop
Logging in
1
type „rem“
2
Select remote
desktop connection 3
Connect to IP
192.168.0.100
4 User: siemens
Pwd: tia 5
Set the network adapter of your computer to
IP: 192.168.0.101 Subnet: 255.255.255.0
Seite 31 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Geräte & Netzwerk-Sicht
Im TIA Portal
Automatische Telegrammkonfiguration und
Technologie-Einstellung
Parameter des Antriebs
Nur ein paar vorkonfigurierte
Benutzerparameter des Antriebs (<10)
Online-Sicht wie SIMATIC und Vergleich
zum Projekt
SINAMICS V90 PN
TIA Portal-Integration ‒ Engineering-Highlights
Einfache Antriebsoptimierung durch
Selbstoptimierung (One-button Autotuning)!
Schneller Start und Betrieb!
Look & Feel entspricht SIMATIC-Engineering!
Sie verwenden nur das, was Sie benötigen !
Seite 32 Technologie-Workshop 2018 Februar 2018

SIMATIC S7-1500 T-CPU Technologieobjekte für Motion Control
siemens.de/t-cpu
Februar 2018 Technologie-Workshop 2018 Seite 33

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 34 Technologie-Workshop 2018
Drehzahl- / Positionier- / Gleichlauf-Achsen 3.1
Nocken / Nockenspuren / Messtaster 3.2
Gleichlauf-Achsen / koordinierte Achsen 3.3
Kurvenscheiben 3.4
Technische Details 4
Support / Infos 5
Februar 2018
Kinematiken 3.5

Frei verwendbar © Siemens AG 2018
Technologieobjekte für Motion Control
• TOs sind Softwareobjekte in der Steuerung
• TOs repräsentieren die mechanischen Komponenten
• TOs kapseln die technologische Funktionalität
• TOs werden einheitlich konfiguriert und parametriert
• TOs erlauben eine einfache Sicht auf Motion Control
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Was ist ein TO?
abs. rel.
Seite 35
Einfache Konfiguration, IBN und Programmierung
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Technologieobjekte für Motion Control
• TOs für Drehzahl-, Positionier- und Gleichlaufachse,
Kurvenscheibe, Nocken, Nockenspur, Messtaster oder
externer Geber
• TO-Datenbaustein enthält alle Konfigurationsdaten,
Soll-/Istwerte und Statusinformationen des TO
• TO kommuniziert mit dem Antrieb und der Peripherie
Antriebsdaten werden automatisch adaptiert
• TO steuert und regelt einen Antrieb bzw. Antriebsverbund
• TOs werden über das Anwenderprogramm mit PLCopen-
Befehlen programmiert
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Wie ist ein TO ins System eingebunden?
Seite 36
Einfache Konfiguration, IBN und Programmierung
Analog
Signal
Puls-/Richtungs-
Schnittstelle
U/I
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Getriebe- und
Kurvenscheibengleichlauf
Anwenderprogramm:
• Aufsynchronisieren
• Leitwert
• Getriebeverhältnis
• Kurvenscheibe
TO berechnet und regelt die
Lage für Gleichlaufachse
abhängig von einem Leitwert
Antrieb regelt die Drehzahl
Lagegeber ist notwendig
Gleichlaufachse
Positionieren
Anwenderprogramm:
• Positionsvorgabe
• Referenzieren
• Überlagerte Bewegung
TO bildet die
Beschleunigungs- und
Bremsrampen
TO regelt die Lage
Antrieb regelt die Drehzahl
Lagegeber ist notwendig
Positionierachse
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Achstypen
Drehzahlgesteuert verfahren
Anwenderprogramm:
• Geschwindigkeitsvorgabe
TO bildet die Beschleunigungs-
und Bremsrampen
Antrieb regelt die Drehzahl
Kein Lagegeber nötig
Drehzahlachse
Seite 37
Schalenmodell der Technologieobjekte
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Positionierachse
Anwenderprogramm
TO „Achse 1“
Kommunikation
Messsystem-Auswertung
Überwachung
Lage-
regelung Lagesollwert-
berechnung
TO-DB mit
Istwert/Status/
Alarme
Configuring the
technology
object "axis"
Konfiguration
des
Technologie-
objekts
„Achse“
Konsistenzprüfungen bereits bei der Konfiguration der
Technologieobjekte und der Erstellung der Anwenderprogramme
Programme
mit
PLCopen-Befehlen
S7-1500 CPU TIA Portal
Configuring the Programmierung
des
Technologie-
objekts
„Achse“
Seite 38 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
• Lageregelung in der Steuerung im Servo-Takt (MC-Servo)
• Drehzahl- und Stromregelung im Antrieb
• Vorsteuerung der Geschwindigkeit minimiert geschwindigkeitsabhängigen Schleppfehler der Lageregelung
• Symmetrierfilter verzögert den Positionssollwert im Bezug zur Geschwindigkeitsvorsteuerung
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Regelkreis ‒ Lageregelung in der Steuerung
Seite 39
Sollwert-
generierung
+
+
Achs-Befehl
Vorsteuerung
Symmetrierfilter Verstärkung
Soll-
geschwindigkeit
Soll-
position
Lageregler
Antrieb
Istposition
-
Lageregelung
Steuerung
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
• Lageregelung im Antrieb mit aktiviertem DSC
• Lageregler im Takt des Drehzahlregelkreises (z. B. in 125 µs)
• Wesentlich größere Lageregler-Verstärkungsfaktor Kv möglich und damit erhöhte Dynamik im
Führungsverhalten und Störgrößenausregelung bei hochdynamischen Antrieben
• Möglichkeit längerer Taktzeiten für Motion Control in der Steuerung
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Regelkreis ‒ Lageregelung im Antrieb (DSC)
Seite 40
Sollwert-
generierung
+
+
Achs-Befehl
Vorsteuerung
Symmetrierfilter Verstärkung
Soll-
geschwindigkeit
Soll-
position
Lageregler
Antrieb
-
Lageregelung
Steuerung
mit DSC (Dynamic Servo Control) DSC verfügbar mit
• SINAMICS S120
• SINAMICS S210
• SINAMICS V90 PN
+ -
Hochdynamische Antriebsregelung mit DSC
Istposition
Technologie-Workshop 2018
Details Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Gleichlaufachse
Seite 42
• TO Gleichlaufachse
• Leitwert ist
• Sollposition einer Leitachse oder
• Soll-/Istposition einer Leitachse (nur T-CPU) oder
• Istposition eines externen Gebers (nur T-CPU)
• Leitwertumschaltung möglich
• Aufsynchronisieren auf bewegten oder stehenden
Leitwert
• Aufsynchronisieren ohne Vorgabe der Synchronposition
• Aufsynchronisieren mit Vorgabe der Synchronposition
(nur T-CPU)
• Aufsynchronisieren gemäß den Vorgaben am Befehl
• Getriebeübersetzung am Befehl änderbar
Winkelsynchroner Getriebegleichlauf Positionierachse Gleichlaufachse
Folgeachse Leitwert Getriebe Aufsynchronisieren
Leitachse Folgeachse
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
• Momentenbegrenzung
• Voraussetzung ist Telegramm 10x
• Wirksamkeit an Motor- oder Last-Seite einstellbar
• Einheiten werden abhängig vom Motortyp angepasst
Fahren auf Festanschlag
• Anfahren mit Momentenbegrenzung
• Festanschlagserkennung über Schleppabstand
• „Klemmen“ mit nicht mehr veränderten Sollwert
• Klemmkraft/-moment kann verändert werden
• Wegbrechen oder Zurückdrücken des Festanschlags
wird überwacht
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Momentenbegrenzung und Fahren auf Festanschlag
Seite 43
Beispiel:
Schließen der Form bei
Spritzgießmaschinen
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Achse in Simulation
Seite 44
Simulation Achse ohne Antrieb
Antrieb muss nicht
projektiert sein!
• Aktivierung des Simulationsbetriebs durch Konfiguration
der Achse und Download der CPU oder TO-Restart
• Reale Achse kann auch zunächst ohne Antrieb
projektiert und simuliert werden
• Achsgranulare Einstellung
• Mischung von realen vorhandenen und simulierten
Antrieben möglich
• Volle PLC-Funktionalität (Trace, Alarming, Steuertafel, …)
Nutzen:
• Test der Applikation schon am Schreibtisch
• Test bei nicht vollständig vorhandener Antriebstechnik
• Ermöglicht Auslastungsmessung der Steuerung
• Realistischer Testbetrieb bei großer Achsanzahl
• Modulare Maschine
Simulierte Achsen − Test der Applikation auch
ohne angeschlossene Antriebe
Simulation reale Achse
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Virtuelle Achsen
Seite 45
Virtuelle
Leitachse
Simulation Achse ohne Antrieb virtuelle Achse
• Virtuelle Achse ist Achse ohne Antriebszuordnung
und mit aktivierter Simulation
• Verwendung einer virtuellen Achse, z. B. als
virtuelle Leitachse (Königswelle) für mehrere
Folgeachsen (Taktgeber für die Maschine)
• Virtuelle Achse hat volle Funktionalität
• Nocken und Messtaster auch bei virtueller Achse
möglich
Virtuelle Achsen
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
• Konsistenzprüfungen bereits bei der Konfiguration
der Technologieobjekte und der Erstellung der
Anwenderprogramme
• Diagnoseinformationen, die sich auf
Technologieobjekte beziehen (Technologie-Alarme,
Statusinformationen), werden im Inspektorfenster
des TIA Portals und zusätzlich im Diagnosefenster
des jeweiligen Technologieobjekts angezeigt
• Bei Technologie-Alarm wird eine entsprechende
Meldung im TIA Portal sowie an HMI-Geräten
angezeigt
• Technologie-Alarme werden über den Technologie-
Datenbaustein gemeldet und können im
Anwenderprogramm ausgewertet werden.
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Umfangreiche Diagnoseinformationen
Seite 46
Diagnose-Maske im TIA Portal
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Power - MC_Power
Reset - MC_Reset
Home - MC_Home
Halt - MC_Halt
Move Absolute 1 - MC_MoveAbsolute 1
Move Absolute 2 - MC_MoveAbsolute 2
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Aufgabe: Positionierung eines Wasserkastens.
Vorgehen: Erstellen Sie ein Verfahrprogramm.
Applikation: Positionieren
Technische Daten:
v1 = 100 mm/s v2 = 200 mm/s
200 mm
Position 1
0 mm
Position 2
200 mm
Laufrichtung
L I V E D E M O
Seite 47 Technologie-Workshop 2018 Februar 2018
Positionieren
Programmierung

Frei verwendbar © Siemens AG 2018
Power - MC_Power
Reset - MC_Reset
Home - MC_Home
Halt - MC_Halt
Move Absolute 1 - MC_MoveAbsolute 1
Move Absolute 2 - MC_MoveAbsolute 2
Übung 2
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Aufgabe: Positionierung eines Wasserkastens.
Vorgehen: Erstellen Sie ein Verfahrprogramm.
Applikation: Positionieren
Technische Daten:
v1 = 100 mm/s v2 = 200 mm/s
200 mm
Position 1
0 mm
Position 2
200 mm
Laufrichtung
Seite 48 Technologie-Workshop 2018 Februar 2018
Positionieren
Programmierung

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 49 Technologie-Workshop 2018
Drehzahl- / Positionier- / Gleichlauf-Achsen 3.1
Nocken / Nockenspuren / Messtaster 3.2
Gleichlauf-Achsen / koordinierte Achsen 3.3
Kurvenscheiben 3.4
Technische Details 4
Support / Infos 5
Februar 2018
Kinematiken 3.5

Frei verwendbar © Siemens AG 2018
Technologieobjekt Nocken „TO_OutputCam“
Erzeugt Schaltsignale auf Digitalausgang abhängig von der Position einer Achse oder eines
Externen Gebers.
Technologieobjekt Nockenspur „TO_CamTrack“
Erzeugt eine Schaltsignalfolge auf Digitalausgang (mit bis zu 32 Einzelnocken) abhängig
von der Position einer Achse oder eines Externen Gebers.
Technologieobjekt Messtaster „TO_MeasuringInput“
Erfasst Istpositionen schnell, genau und ereignisabhängig.
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Nocken, Nockenspur und Messtaster
Seite 50 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Nocken
Technologieobjekt Nocken
• Erzeugt Schaltsignale auf Digitalausgang abhängig von
der Position einer Achse oder eines externen Gebers
• Verschaltet auf Soll- oder Istposition einer Achse
oder externen Gebers
• Wegnocken
• Zeitnocken
• Ausgabe über Standard I/O
• Ausgabe über TM Timer DI/DQ für hochgenaue
Nockenausgabe
Einschaltbereich
Anfangsposition Endposition
s
Seite 51 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Nockenspur
Technologieobjekt Nockenspur
• Erzeugt Schaltsignalfolge auf Digitalausgang
abhängig von Position Achse/Externer Geber
• Verschaltet auf Soll- oder Istposition
• Bis zu 32 Nocken auf einer Spur
• Wegnocken / Zeitnocken
• Ausgabe über Standard I/O
• Ausgabe über TM Timer DI/DQ für hochgenaue
Nockenausgabe
• Zyklische Fortsetzung der Nockenspur
Beispiel
Nockenspur
5 Nockenspuren
Seite 52
Hoher Flexibilität
über Achsbezugsposition komplette Nockenspur
verschiebbar
produktbezogene Programmierung
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Messtaster
Technologieobjekt Messtaster
• Erfasst Istpositionen schnell, genau und
ereignisabhängig.
• Verschaltet mit Position einer Achse oder externen
Gebers
• Messtaster angebunden an Antrieb (über PROFIdrive),
oder Messtaster angebunden an TM Timer DIDQ
• Einmaliges Messen, oder Zyklisches Messen (bis zu
zwei Messwerte je Bearbeitungstakt)
• Messen mit Messbereich
Beispiel für Messung der nächsten steigenden
Flanke im Messbereich
Beispiel
Druckmarkenerkennung
Seite 53 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Messtaster am TM Timer DIDQ
• Messtaster entkoppelt vom Antrieb
• Mehrere Messtaster für eine Achse
• Messtaster für virtuelle Achse möglich
• TO berechnet aus dem Zeitstempel einen
exakten Positionswert der Achse/externen
Geber
Messtaster am Antrieb (über PROFIdrive)
• Messtaster wird im Antrieb verarbeitet
• Max. 2 Messtaster je Antrieb
• Inkrementgenauer Positionswert der
Achse/externen Gebers wird im Antrieb
gebildet
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Anbindung der Messtaster
Seite 54
S7-1500
T-CPU
Motor
ENC
Antrieb
ET 200MP/SP TM Timer DIDQ
DI
S7-1500
T-CPU
Motor
ENC
Antrieb
DI
PROFIdrive-Telegramm mit Soll/Istwert
Telegramm mit Zeitstempel
Messtasterposition im PROFIdrive-Telegramm enthalten (mit Soll-/Istwert)
Messtaster
Mess-
taster
Technologie-Workshop 2018
Details Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Time-based IO in ET 200SP und ET 200MP
ET 200SP CM 4 x IO-Link
• Bis zu 4 IO-Link Kanäle mit Zeitstempel
ET 200SP TM Timer DIDQ 10x24V
• 4 Eingänge
• 6 Ausgänge
ET 200MP TM Timer DIDQ 16x24V
• 8 Eingänge und 16 Ausgänge
• Davon max. 16 mit Zeitstempel konfigurierbar Voraussetzung: taktsynchr. Betrieb (IRT)
derzeit nur mit ET 200SP/MP (Zentraler Aufbau zukünftig geplant)
Seite 56 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Mehrwerte Time-based IO
Genauigkeit
… unabhängig von Übertragungszeiten und der
Zykluszeit des Anwenderprogramms
Entlastung von CPU und Feldbus
… für mehr Performance und größere Mengengerüste
Optimale Unterstützung durch Technologieobjekte
… für hochgenaue Nocken und Messtaster
Skalierbare Mengengerüste
… zur Anpassung an die Maschinengröße
Universell
einsetzbar Messtaster
Seite 57 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Power - MC_Power
Reset - MC_Reset
Home - MC_Home
Halt - MC_Halt
Move Absolute 1 - MC_MoveAbsolute 1
Move Absolute 2 - MC_MoveAbsolute 2
Move Velocity - MC_MoveVelocity
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Aufgabe: Positionieren eines Wasserkastens über einen
Messtaster.
Vorgehen: Legen Sie das TO Messtaster an und
konfigurieren Sie dieses, erstellen Sie ein
Verfahrprogramm.
Applikation: Positionieren über Messtaster
Technische Daten:
v1 = 200 mm/s v2 = 100 mm/s Offset Sensor-Ziel: 200 mm
200mm
Messtaster
1000 - 1300mm
Absetzbereich Zielposition 2
Laufrichtung
Seite 58 Technologie-Workshop 2018
L I V E D E M O
Februar 2018
Positionieren über Messtaster
Konfiguration und Programmierung

Frei verwendbar © Siemens AG 2018
Power - MC_Power
Reset - MC_Reset
Home - MC_Home
Halt - MC_Halt
Move Absolute 1 - MC_MoveAbsolute 1
Move Absolute 2 - MC_MoveAbsolute 2
Move Velocity - MC_MoveVelocity
Übung 3
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Aufgabe: Positionieren eines Wasserkastens über einen
Messtaster.
Vorgehen: Legen Sie das TO Messtaster an und
konfigurieren Sie dieses, erstellen Sie ein
Verfahrprogramm.
Applikation: Positionieren über Messtaster
Technische Daten:
v1 = 200 mm/s v2 = 100 mm/s Offset Sensor-Ziel: 200 mm
200mm
Messtaster
1000 - 1300mm
Absetzbereich Zielposition 2
Laufrichtung
Seite 59 Technologie-Workshop 2018 Februar 2018
Positionieren über Messtaster
Konfiguration und Programmierung

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 60 Technologie-Workshop 2018
Drehzahl- / Positionier- / Gleichlauf-Achsen 3.1
Nocken / Nockenspuren / Messtaster 3.2
Gleichlauf-Achsen / koordinierte Achsen 3.3
Kurvenscheiben 3.4
Technische Details 4
Support / Infos 5
Februar 2018
Kinematiken 3.5

Frei verwendbar © Siemens AG 2018
Seite 61 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Synchronisierte Bewegungen
Seite 62 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Synchronisierte Bewegungen
Seite 63 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Koordinierte Achsen
Relativer und absoluter Getriebegleichlauf
Der Unterschied zwischen relativem und absolutem Gleichlauf liegt in den
Möglichkeiten der Aufsynchronisation!
Relativer Gleichlauf S7-1500T S7-1500 Absoluter Gleichlauf
Synchronisation
ohne Vorgabe der
Synchronposition
Leitachse Folgeachse
S7-1500T S7-1500
Synchronisation
mit Vorgabe der
Synchronposition
Synchronpositionen
Leitachse Folgeachse
Seite 64 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Koordinierte Achsen
Applikationen Gleichläufe
Aufsynchronisieren mit Vorgabe der
Synchronposition
Aufsynchronisieren ohne Vorgabe der
Synchronposition
Relativer Gleichlauf Absoluter Gleichlauf
Seite 66 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Po
sit
ion
en
Koordinierte Achsen
Vorlaufendes Aufsynchronisieren
Startposition = Synchronposition Leitachse - Aufsynchronisierlänge Ge
sc
hw
ind
igke
iten
Aufsynchronisierlänge: 20 mm
Synchronpostionen: 10 mm
PositioningAxis.ActualPosition [mm] PositioningAxis.ActualVelocity mm/s]
SynchronousAxis.ActualPosition [mm] SynchronousAxis.ActualVelocity [mm/s]
Seite 67 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Koordinierte Achsen
Aufsynchronisierverhalten PositioningAxis.ActualPosition [mm] PositioningAxis.ActualVelocity mm/s]
SynchronousAxis.ActualPosition [mm] SynchronousAxis.ActualVelocity [mm/s]
SyncPosition: 10 mm ; MasterStartDistance: 10 mm SyncPosition: 0 mm ; MasterStartDistance: 10 mm SyncPosition: 10 mm ; MasterStartDistance: 20 mm
Symmetrisch Zurücklaufend Aufholend
Februar 2018 Technologie-Workshop 2018 Seite 68

Frei verwendbar © Siemens AG 2018
Koordinierte Achsen
Leitwertverschaltung
Positionierachse
Gleichlaufachse
nur
Sollwert-
Kopplung
Gleichlauf-
achse
Positionierachse
Gleichlaufachse
Sollwert-
Kopplung
Gleichlauf-
achse
Externer Geber
Istwert-
Kopplung
S7-1500 S7-1500T
Seite 69 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Extrapolation des Istwertes bei Istwertkopplung
Leitwertseitige Extrapolation um Verzugszeiten
der Istwertverarbeitung zu kompensieren
„Zukünftiger“ Leitwert wird auf Basis der bereits
bekannten Werte hochgerechnet
Extrapolationszeit hat Leitachs- und Folgeachs-
bedingten Anteil (vom System ermittelt)
Durch Filter (Istpositions- und
Geschwindigkeitsfilter) und Toleranzband
„Beruhigung“ der Werte für die Extrapolation
Hochgenauer Winkelgleichlauf auch bei Kopplung auf einen Istwert!
Leitwert 2 Folgewert
Synchronität der
Istwerte
Motion Control Zyklus
Übertragungszeit
Leitwert 1
Übertragungszeit
S7-1500T S7-1500
Seite 70 Technologie-Workshop 2018 Februar 2018
Koordinierte Achsen
Gleichlauf mit Istwertkopplung – Istwertextrapolation und Istwertfilter

Frei verwendbar © Siemens AG 2018
Aufgabe: Fliegendes Zuschneiden des vom Vorschub
angetriebenen Materials auf gleich lange Stücke.
Vorgehen: Konfigurieren Sie die Leitwertverschaltung
und erstellen Sie ein Verfahrprogramm.
Applikation: Fliegende Schere, schneiden auf Länge
Achse 1
(Material)
Achse 2
(Schere)
Grundstellung
Technische Daten:
v1 = 100 mm/s Trennlänge: 1000 mm
Leitwertweg: 200 mm Synchronposition Vorschub, Schere: 100 mm
Power Material/Shear - MC_Power
Reset Material/Shear - MC_Reset
Home Shear - MC_Home
Start/Stop Material -MC_MoveJog
Start Shear - MC_GearInPos
Simulate „Cutting done“
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7 Cutting
L I V E D E M O
Seite 73 Technologie-Workshop 2018 Februar 2018
Absoluter Gleichlauf
Programmierung

Frei verwendbar © Siemens AG 2018
Übung 4
Aufgabe: Fliegendes Zuschneiden des vom Vorschub
angetriebenen Materials auf gleich lange Stücke.
Vorgehen: Konfigurieren Sie die Leitwertverschaltung
und erstellen Sie ein Verfahrprogramm.
Applikation: Fliegende Schere, schneiden auf Länge
Achse 1
(Material)
Achse 2
(Schere)
Grundstellung
Technische Daten:
v1 = 100 mm/s Trennlänge: 1000 mm
Leitwertweg: 200 mm Synchronposition Vorschub, Schere: 100 mm
Power Material/Shear - MC_Power
Reset Material/Shear - MC_Reset
Home Shear - MC_Home
Start/Stop Material -MC_MoveJog
Start Shear - MC_GearInPos
Simulate „Cutting done“
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7 Cutting
Seite 74 Technologie-Workshop 2018 Februar 2018
Absoluter Gleichlauf
Programmierung

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500T „Fliegende Säge“
Anwendungsbeispiele „FlyingSawBasic“ und „FlyingSawAdvanced“
Standardapplikation realisiert auf Basis der SIMATIC S7-1500T eine
Fliegende Säge bzw. Fliegende Schere, z.B. für Folie, Metall, Papier,
Pappe. Funktionen: Automatikbetrieb, Sofortschritt, Schneiden auf
Länge oder auf Druckmarke, virtueller oder realer Leitwert.
Beitrags-ID: 109744840
Seite 75 Technologie-Workshop 2018 Februar 2018
Funktion "FlyingSawBasic" "FlyingSawAdvanced"
Schneiden auf Länge Ja Ja
Schneiden auf Messtastersignal (Marke auf der
Materialbahn) Ja
Abstand Messtaster max.
eine Produktlänge
Ja
Abstand Messtaster beliebig
(Messtastersignale werden gepuffert)
Fliegende Umschaltung zwischen den
Leitwertquellen reale Achse und externer Geber Ja Nein
Sofortschnitt Ja Ja
Symmetrisches Aufsynchronisieren Ja Ja
Rückfahrdynamik Parametrierbar Parametrierbar / Automatisch
Schnitt- und Schnittlängenzähler Ja Applikativ möglich
Automatische Druckmarkensuche Applikativ möglich Mit automatischer
Scharfbereichsermittlung
Fahren auf Übergabeposition Nein Ja
Lücke ziehen Nein Ja
Dynamische Verschiebung der Startposition Applikativ möglilch Ja
HMI - IBN / Test-Interface Ja Ja

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 76 Technologie-Workshop 2018
Drehzahl- / Positionier- / Gleichlauf-Achsen 3.1
Nocken / Nockenspuren / Messtaster 3.2
Gleichlauf-Achsen / koordinierte Achsen 3.3
Kurvenscheiben 3.4
Technische Details 4
Support / Infos 5
Februar 2018
Kinematiken 3.5

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Was ist eine Kurvenscheibe? Beispiel Quersiegler
Seite 77
vFolie
vsync=vFolie
Synchronlauf: Rückzugs-
bewegung
x
v
0x1x
2x
syncvv 01
nächster
Arbeitstakt
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Feature / Funktion Nutzen
• Grafische /
tabellarische
Bearbeitung der
Kurvenscheibe 1)
• Flexible / effiziente
Eingabemöglichkeiten
• Identische Kurven-
scheiben-Interpolation
im Runtime und im
Engineering
• Sofortige Analyse des
Kurvenscheiben-
verhaltens beim
Engineering
• Optimierung der
Kurvenscheiben-
segmente gemäß def.
Randbedingungen 2)
• Höhere Motion Qualität
• Berechnung und
Modifizierung von
Kurvenscheiben zur
Laufzeit
• Höhere Maschinen
Flexibilität
Advanced Controller – SIMATIC S7-1500 T-CPU
Das Highlight im TIA Portal ‒ der Kurvenscheibeneditor
1) durch Polynomsegmente, Interpolationspunkte/-kurven
2) geschwindigkeits- und beschleunigungsstetig (ruckfrei)
entsprechend den Bewegungsgesetzen
für Kurvengetriebe VDI 2143
Seite 78 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Arbeitssegment
Übergangssegment (vom System interpoliert)
Zuordnung realer Achsen
Grafische oder tabellarische Eingabe
Technologie-Workshop 2018 Seite 79 Februar 2018

Frei verwendbar © Siemens AG 2018
System-Interpolation mit kubischen
oder Bezier-Splines
Arbeitssegmente:
1000 Stützpunkte
und 50 Segmente
Technologie-Workshop 2018 Seite 80 Februar 2018

Frei verwendbar © Siemens AG 2018
Interpolation nach VDI 2143
Technologie-Workshop 2018 Seite 81 Februar 2018

Frei verwendbar © Siemens AG 2018
Darstellung von Geschwindigkeit,
Beschleunigung und Ruck
Auswahl und Einstellung der
Kurvenansichten
Technologie-Workshop 2018 Seite 82 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekte
Bearbeiten von Kurvenscheiben über die Applikation zur Laufzeit
Seite 83
Vor Verwendung der Kurvenscheibe Interpolieren
mit Befehl „MC_InterpolateCam“
Skalierung und Verschiebung der Kurvenscheibe über Parameter
am Befehl „MC_CamIn“
Veränderung der Kurvenscheibe durch Editieren des TO-DB
Kurvenscheibendaten liegen im TO-DB
Erzeugen von Kurvenscheiben zur Laufzeit durch Funktionen der
Bibliothek „LCamHdl“
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Power Feeder/Press - MC_Power
Reset Feeder/Press - MC_Reset
Home Feeder/Press - MC_Home
Basic Position Press - MC_MoveAbsolute
Start Press - MC_MoveVelocity
Basic Position Feeder - MC_MoveAbsolute
Start Feeder - MC_CamIn
Aufgabe: Realisieren einer Presse mit Materialvorschub
zur Materialzuführung.
Vorgehen: Legen Sie das TO Kurvenscheibe an und
konfigurieren Sie dieses, erstellen Sie ein
Verfahrprogramm.
Applikation: Pressenapplikation mit Zangenvorschub
Technische Daten:
v1 = 360 ˚/s
Vorschub: 40 mm
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
L I V E D E M O
Seite 84 Technologie-Workshop 2018 Februar 2018
TO Kurvenscheibe & Kurvengleichlauf
Konfiguration und Programmierung

Frei verwendbar © Siemens AG 2018
Power Feeder/Press - MC_Power
Reset Feeder/Press - MC_Reset
Home Feeder/Press - MC_Home
Basic Position Press - MC_MoveAbsolute
Start Press - MC_MoveVelocity
Basic Position Feeder - MC_MoveAbsolute
Start Feeder - MC_CamIn
Übung 5
Aufgabe: Realisieren einer Presse mit Materialvorschub
zur Materialzuführung.
Vorgehen: Legen Sie das TO Kurvenscheibe an und
konfigurieren Sie dieses, erstellen Sie ein
Verfahrprogramm.
Applikation: Pressenapplikation mit Zangenvorschub
Technische Daten:
v1 = 360 ˚/s
Vorschub: 40 mm
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Seite 85 Technologie-Workshop 2018 Februar 2018
TO Kurvenscheibe & Kurvengleichlauf
Konfiguration und Programmierung

Frei verwendbar © Siemens AG 2018
Pressenapplikation mit Zangenvorschub
Achse 2
Achse 1
0°
Presse
Vorschub
V90
PN V90
PN
V90
PN
CPU 1515T
V90
PN
Funktionsdiagramm (Kurvenscheibe)
Übung 5
Presse Vorschub
0° - 5° 0 mm
135° - 225° 40 mm
270° - 360° 0 mm
Seite 86 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Übung 5b - Zusatz
Aufgabe: Erweiterung der Applikation Zangenvorschub
um die Ansteuerung der Zange
Vorgehen: Legen Sie das TO Nocken an und
konfigurieren Sie dieses, erweitern Sie das
Verfahrprogramm.
Applikation: Pressenapplikation mit Nocken für den Vorschub
Zangenwinkel
Öffnen: 225°
Schließen: 270°
Power Feeder/Press - MC_Power
Reset Feeder/Press - MC_Reset
Home Feeder/Press - MC_Home
Basic Position Press - MC_MoveAbsolute
Start Press - MC_MoveVelocity
Basic Position Feeder - MC_MoveAbsolute
Start Feeder - MC_CamIn
Activate Output cam - MC_OutputCam
Folgende Funktionen sollen realisiert werden:
0
1
2
3
4
5
6
7
Technische Daten:
v1 = 360 ˚/s
Vorschub: 40 mm
Seite 87 Technologie-Workshop 2018 Februar 2018
TO Nocke
Konfiguration und Programmierung

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 88 Technologie-Workshop 2018
Drehzahl- / Positionier- / Gleichlauf-Achsen 3.1
Nocken / Nockenspuren / Messtaster 3.2
Gleichlauf-Achsen / koordinierte Achsen 3.3
Kurvenscheiben 3.4
Technische Details 4
Support / Infos 5
Februar 2018
Kinematiken 3.5

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Was sind Kinematiken?
Seite 89
Kinematiken
Kinematiken sind frei programmierbare mechanische Systeme, bei
denen mehrere mechanisch gekoppelte Achsen die Bewegung
eines Arbeitspunkts bewirken.
Anwendungsfälle
• Palettieren, Entnahme- und Bestückung
• Montageaufgaben
• Pick & Place im Allgemeinen
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Das Highlight: Kinematik-Funktionen im TIA Portal
Seite 90
Feature / Funktion Nutzen
• Vordefinierte Kinematiken
• Typischen Kinematiken (Kartesisches Portal,
Rollenpicker, Delta-Picker, SCARA,
Knickarm, Tripod, Zylindrischer Roboter)
effizient programmieren und automatisieren
• Anwenderdefinierte Transformation • Einfache Integration eigener Kinematiken
• Funktionsbausteine nach PLCopen • Programmierung der Kinematik-Funktionen
im gewohnten PLC Umfeld
• Bis zu 4 interpolierende Achsen • X, Y, Z – Bewegung und Orientierung des
Werkzeugs einfach programmieren
• Zonenüberwachung
• Vermeidung der Kollision zwischen Kinematik
und mechanischen Einbauten in der
Maschine
• Konfiguration mit grafischer Unterstützung • Intuitive Parametrierung der Kinematik,
Koordinatensysteme, Werkzeuge und Zonen
• Kinematik-Trace • Diagnose der Bewegung durch 3D
Visualisierung mit Leuchtspuraufzeichnung
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Vordefinierte Kinematiken - Einfach konfigurieren!
Seite 91
1 2 3 4
5 1
2
3
4
5
Das TO Kinematik kann als neues Technologieobjekt angelegt werden.
Für einen Rollen-Picker 3D mit Orientierungsachse sind ein TO Kinematik und vier
Positionierachsen erforderlich.
In der Konfiguration wird der entsprechende Kinematiktyp ausgewählt.
Die Positionierachsen werden der Kinematik zugeordnet.
Die Geometrie der Kinematik wird parametriert.
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Inbetriebnahme mit der Steuertafel
Seite 92
• Tippen
• Auf Zielposition tippen
• Referenzpunkt setzen
• Referenzieren
• Komfortabel: Tippen und
Referenzieren der
Kinematik auf einer
Steuertafel
• Tippen der Kinematik unter
Berücksichtigung von
Koordinatensystem und
Werkzeug
• 3D Visualisierung der
Bewegung im Kinematik
Trace
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Gewohntes Umfeld: Programmierung mit Funktionsbausteinen nach PLCopen
Seite 93
MC_MoveLinearAbsolute 1
MC_MoveLinearAbsolute 2
MC_SetWorkspaceZoneActive 3
MC_SetKinematicsZoneActive 4
MC_MoveLinearRelative 5
MC_SetTool 6
7
• Die Kommandos werden in eine Auftragskette eingetragen und abgearbeitet. Die Dynamikplanung erfolgt über die gesamte Auftragskette.
Die Auftragskette kann bis zu zehn Befehle beinhalten. Die Anzahl von Befehlen in der Auftragskette wir am TO Kinematik (TO-DB) angezeigt.
• Mit MC_GroupInterrupt, MC_GroupContinue, MC_GroupStop wird die Abarbeitung der Auftragskette unterbrochen, fortgesetzt oder abgebrochen.
Befehlsumfang des TO Kinematik
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Umfangreiche Diagnosefunktionen
Seite 94
Hilfreich beim Engineering
im TIA Portal integrierte Online Diagnose des TO Kinematics
• Status- und Fehlerbits
• Bewegungsstatus
• Zonen- und Werkzeugstatus
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Technologieobjekt Kinematik
Der Kinematik-Trace: 3D Visualisierung und Bewegungsaufzeichnung
Seite 95
3D Visualisierung der
konfigurierten Kinematik
Aufzeichnung der Bewegung
und Darstellung als Leuchtspur
Abspielen, Import und Export
von Aufzeichnungen
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Motion Control mit SIMATIC S7-1500 T-CPU ‒ SINAMICS V90 PN
TIA Portal-Integration ‒ Engineering-Highlights
Schneller Start und Betrieb! … dank der Vorkonfiguration des Antriebs (Parameter, Telegrammtyp, …)
für den Betrieb mit einem Technologieobjekt von SIMATIC S7-1500
Sie verwenden nur das, was Sie benötigen!
… da es nur ein paar vorkonfigurierte Benutzerparameter des Antriebs (<10) gibt.
Einschließlich graphischer Kennzeichnung über Unterschiede zwischen Offline<>Online; Sie haben stets den Überblick..
Look and Feel entspricht SIMATIC-Engineering!
Es ist keine manuelle Anpassung der Technologiekonfiguration notwendig!
… dank automatischer Adaption der technologischen Größen
zwischen dem Controller und dem Antrieb.
Die Adaption zur Laufzeit passt automatisch die Konfigurationsdaten für Drehzahl, Drehmoment und Geber an.
Das elektronische Typenschild des Motors und Gebers wird ebenfalls unterstützt.
Seite 96 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Motion Control mit SIMATIC S7-1500 T-CPU ‒ SINAMICS V90 PN
TIA Portal-Integration ‒ Engineering-Highlights
Machen Sie sich keine Gedanken bezüglich Antriebsoptimierung!
… dank benutzerfreundlicher Engineering-Schnittstelle für Selbstoptimierung
(One-button Autotuning)
Einschließlich Messung des kompletten Antriebsstrangs und automatischer Einstellung der
Resonanzunterdrückung.
Sie können das Projekt vollständig offline bearbeiten und abschließen
(ohne reales Equipment)!
… dank des Antriebs-Engineerings, das die Motor- und technologieabhängigen
Benutzerparameter kennt und entsprechend konfiguriert
Einschließlich Grenz- und Bezugswerte für Drehzahl und Drehmoment sowie Daten für die optionale
Bremsensteuerung.
Seite 97 Technologie-Workshop 2018 Februar 2018

SIMATIC S7-1500 T-CPU Technische Details
siemens.de/t-cpu
Februar 2018 Technologie-Workshop 2018 Seite 98

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 99 Technologie-Workshop 2018
Motion Control und Safety 4.1
Ablaufsystem 4.2
Achsanzahl und Performance 4.3
Technische Details 4
Support / Infos 5
Februar 2018
Frei verwendbar © Siemens AG 2018
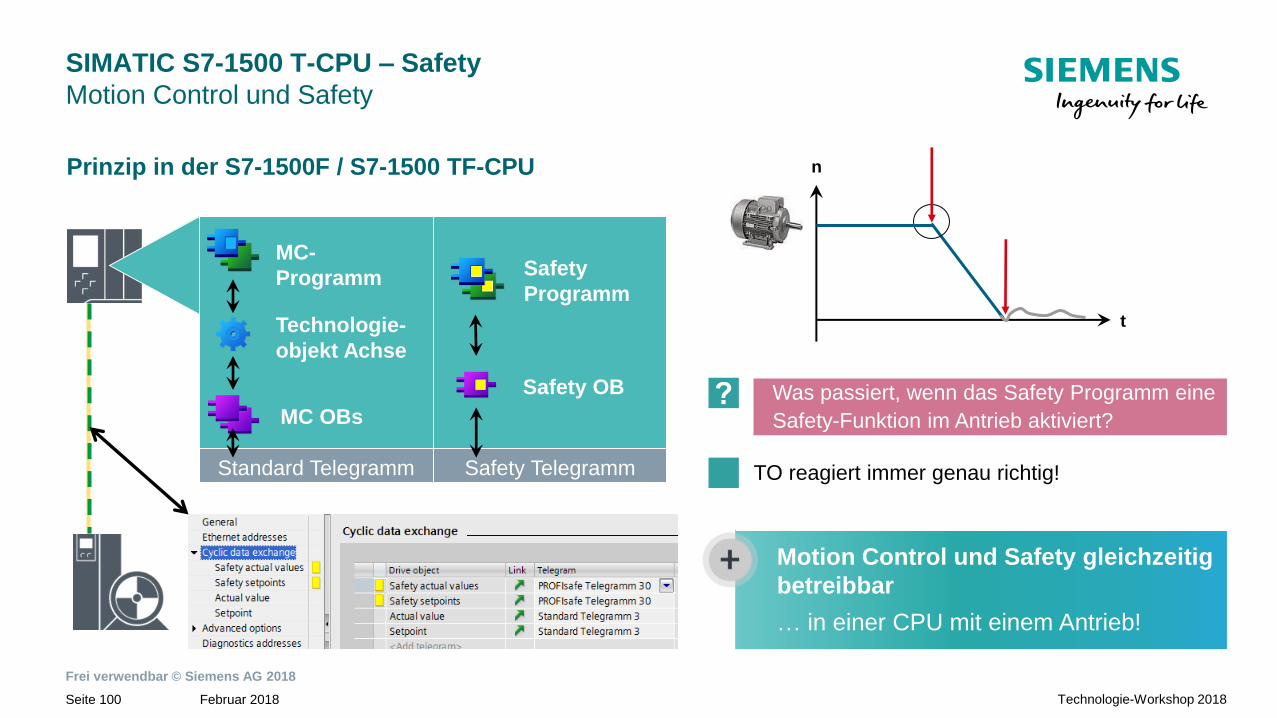
SIMATIC S7-1500 T-CPU ‒ Safety
Motion Control und Safety
Seite 100
Standard Telegramm Safety Telegramm
MC-
Programm
Technologie-
objekt Achse
MC OBs
Safety
Programm
Safety OB Was passiert, wenn das Safety Programm eine
Safety-Funktion im Antrieb aktiviert?
Prinzip in der S7-1500F / S7-1500 TF-CPU
TO reagiert immer genau richtig!
n
t
Motion Control und Safety gleichzeitig
betreibbar
… in einer CPU mit einem Antrieb!
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
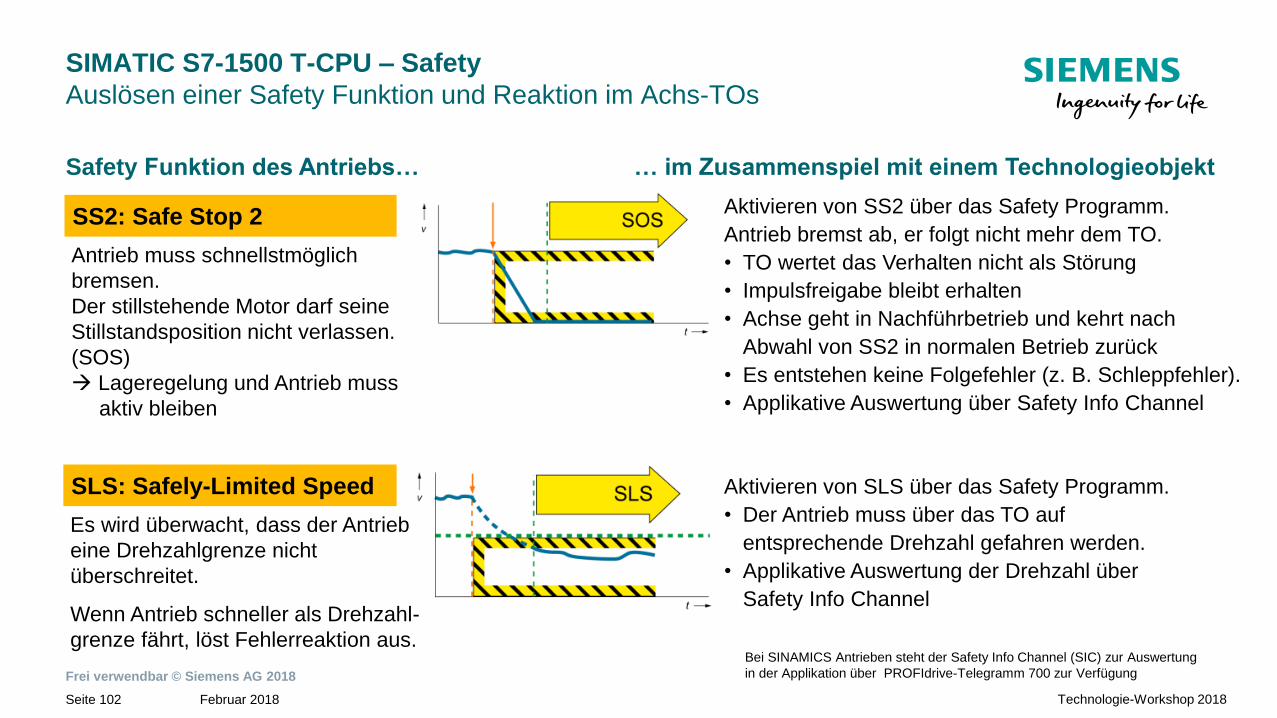
SIMATIC S7-1500 T-CPU ‒ Safety
Auslösen einer Safety Funktion und Reaktion im Achs-TOs
STO: Safe Torque Off
Der Motor muss momentenlos
geschaltet werden.
Ein stillstehender Motor darf
nicht ungewollt beschleunigen.
Aktivieren von STO über das Safety Programm.
Nachdem der Antrieb STO ausgelöst hat,
nimmt auch das TO die Impulsfreigabe weg.
SS1: Safe Stop 1
Antrieb muss schnellstmöglich
bremsen.
Der stillstehende Motor darf nicht
ungewollt beschleunigen. (STO)
Lageregelung und Antrieb muss
ausgeschaltet werden.
Aktivieren von SS1 über das Safety Programm.
Antrieb bremst ab, er folgt nicht mehr dem TO.
TO nimmt jedoch die Impulsfreigabe erst
weg, wenn der Antrieb STO ausgelöst hat.
Seite 101
Safety Funktion des Antriebs… … im Zusammenspiel mit einem Technologieobjekt
Technologie-Workshop 2018 Februar 2018
Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 T-CPU ‒ Safety
Auslösen einer Safety Funktion und Reaktion im Achs-TOs
SLS: Safely-Limited Speed
Es wird überwacht, dass der Antrieb
eine Drehzahlgrenze nicht
überschreitet.
Wenn Antrieb schneller als Drehzahl-
grenze fährt, löst Fehlerreaktion aus.
Aktivieren von SLS über das Safety Programm.
• Der Antrieb muss über das TO auf
entsprechende Drehzahl gefahren werden.
• Applikative Auswertung der Drehzahl über
Safety Info Channel
Safety Funktion des Antriebs… … im Zusammenspiel mit einem Technologieobjekt
SS2: Safe Stop 2
Antrieb muss schnellstmöglich
bremsen.
Der stillstehende Motor darf seine
Stillstandsposition nicht verlassen.
(SOS)
Lageregelung und Antrieb muss
aktiv bleiben
Aktivieren von SS2 über das Safety Programm.
Antrieb bremst ab, er folgt nicht mehr dem TO.
• TO wertet das Verhalten nicht als Störung
• Impulsfreigabe bleibt erhalten
• Achse geht in Nachführbetrieb und kehrt nach
Abwahl von SS2 in normalen Betrieb zurück
• Es entstehen keine Folgefehler (z. B. Schleppfehler).
• Applikative Auswertung über Safety Info Channel
Bei SINAMICS Antrieben steht der Safety Info Channel (SIC) zur Auswertung
in der Applikation über PROFIdrive-Telegramm 700 zur Verfügung
Seite 102 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 103 Technologie-Workshop 2018
Motion Control und Safety 4.1
Ablaufsystem 4.2
Achsanzahl und Performance 4.3
Technische Daten 4
Support / Infos 5
Februar 2018

Frei verwendbar © Siemens AG 2018
Ablaufsystem
Zyklisches Programm und Motion Control-Applikationszyklus
Zykl. Programm (OB 1) t
Wie läuft Motion Control in S7-1500 / S7-1500 T-CPU ab?
Motion Control-Bewegungsbefehle
Programmierung im Anwenderprogramm
(MC_Power, MC_MoveAbsolute, …)
Motion Control-Systemfunktionalität
Interrupt System-Motion-OBs (taktsynchron) (Bewegungsführung, Lagerregelung, Antriebssteuerung)
OB1
OB Servo
OB IPO
tMotion Control-Applikationszyklus
t
OB Servo
OB IPO
OB Servo
OB IPO
MC_
Prog OB1
MC_
Prog
Seite 104 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Ablaufsystem
Motion Control-Applikationszyklus und Motion Control System-OBs
MC-Servo [OB91] Berechnung des Lagereglers
Kommunikation zum Antrieb
Überwachungen
MC-Interpolator [OB92] Auswertung der MC-Anweisungen
Bewegungsführung mit
Sollwertgenerierung (Verfahrprofil)
1
2
Interrupts mit einstellbarem tMotion Control-Applikationszyklus
Was machen die zwei MC-OBs?
Entweder als Weckalarm OBs
Zum Bus taktsynchrone OBs
(Antriebe über PROFIdrive)
tMotion Control- = Lageregeltakt = Interpolatortakt
Applikationszyklus [MC-Servo] [MC-IPO]
Aufrufart
Seite 105 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Zwei neue Ablaufebenen für
Anwenderprogramme
• MC-PreServo (Istwertaufbereitung)
• MC-PostServo (Sollwertaufbereitung)
• Prozessabbild wird vor MC-PreServo
gelesen und nach MC-PostServo
geschrieben
Anwendungsbereich:
• Einbindung kundenspezifischer
Antriebe und Geber
(z. B. für Analoggeber)
• Kundenspezifische Aufbereitung
der TO-Interface-Signale (z. B.
Ventilkennlinie für Hydraulikachse)
• Sollwertführung aus dem
Anwenderprogramm
Ablaufsystem
MC-PreServo [OB67] und MC-PostServo [OB95]
OB1
Fehler OB
Timer interrupt
Prozess Alarm
Taktsynchroner OB
MC-Servo
MC-Interpolator
Fester Zyklus
Priorität
Zeit
MC-Pre-/
MC-PostServo
Seite 106 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Ablaufsystem
MC-PreServo [OB67] und MC-PostServo [OB95]
Seite 107
1 Erster OB1-Zyklus
2 Zweiter OB1-Zyklus
Programmzugriff vor und nach MC-Servo
t 1
t
t
t
t
t
2 3 4
S1
I1
1
S2
I2
1
S3
I3
1 2
S4
I4
2
Applikationszyklus
MC-PreServo [OB67]
MC-Servo [OB91]
MC-PostServo [OB95]
MC-Interpolator [O92]
OB1
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Anwendungsbeispiele
MC-PostServo [OB95]
Seite 108
Telegramm n Drehzahlsollwert
Feldbus
MC-Servo MC-PostServo
n
Anwendungsbeispiel:
• Kompensation einer
nichtlinearen Hydraulikachse
• Modifikation eines Telegramms,
z. B. zur Anbindung eines
Fremdantriebes oder
Bremsenansteuerung
DB
n
Modifikation des
Sollwertes oder eines Telegramms
S7-1200/1500(T) Antrieb
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
S7-1200/1500(T) Antrieb
Anwendungsbeispiele
MC-PreServo [OB67]
Seite 109
Telegramm enc. Geberdaten
MC-Servo MC-PreServo
enc.
Anwendungsbeispiele:
• Anbindung eines analogen
Gebers
• Modifikation eines Telegramms,
z. B. zur Anbindung eines
Fremdantriebes
DB
enc.
Modifikation von
Geberdaten oder Telegrammen
Feldbus
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Technologieobjekte für Motion Control 3
Seite 110 Technologie-Workshop 2018
Motion Control und Safety 4.1
Ablaufsystem 4.2
Achsanzahl und Performance 4.3
Technische Details 4
Support / Infos 5
Februar 2018

Frei verwendbar © Siemens AG 2018
1 2
3
n
Achsanzahl und Performance
Der Einfluss von Motion Control auf die CPU
Motion
Control OB1
OB Servo
OB IPO
t
OB Servo
OB IPO
OB Servo
OB IPO
MC_
Prog OB1
Welchen Einfluss hat das auf
mein Programm?
Wie viele Achsen können in
welcher Zeit bearbeitet werden?
TIA Selection Tool!
SIZER!
MC_
Prog
Seite 111 Technologie-Workshop 2018 Februar 2018
Frei verwendbar © Siemens AG 2018
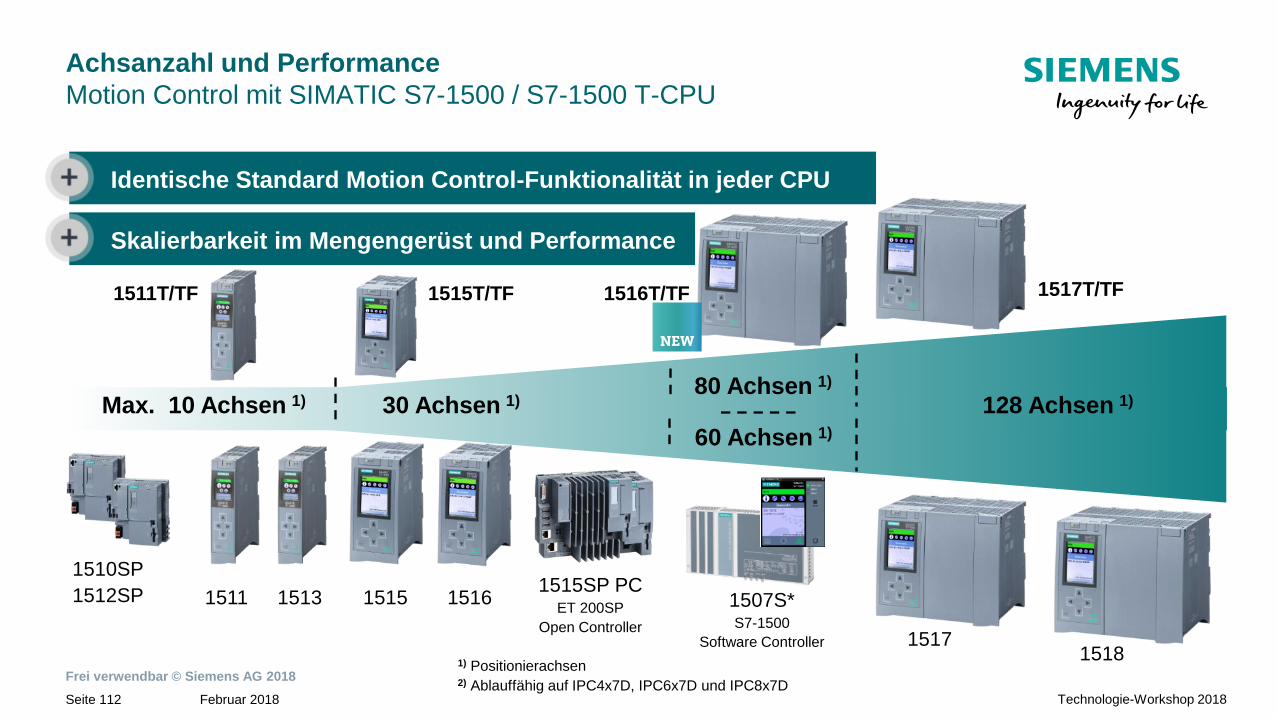
Achsanzahl und Performance
Motion Control mit SIMATIC S7-1500 / S7-1500 T-CPU
Skalierbarkeit im Mengengerüst und Performance
Identische Standard Motion Control-Funktionalität in jeder CPU
Seite 112
2) Ablauffähig auf IPC4x7D, IPC6x7D und IPC8x7D
1) Positionierachsen
1511 1513 1515 1516
1517
1510SP
1512SP 1515SP PC
ET 200SP
Open Controller
1507S* S7-1500
Software Controller
1511T/TF 1515T/TF 1517T/TF 1516T/TF
Max. 10 Achsen 1) 30 Achsen 1)
60 Achsen 1)
128 Achsen 1) 80 Achsen 1)
Technologie-Workshop 2018
NEW
1518
Februar 2018

Frei verwendbar © Siemens AG 2018
Achsanzahl und Performance
Anzahl Technologieobjekte / Motion Control Ressourcen
Verfügbare Motion Control Ressourcen
1511T / TF 1515T / TF 1516T / TF 1517T / TF
800 2400 6400 10240
Technologieobjekt Bedarf
Motion Ressourcen
Drehzahlachse 40
Positionierachse 80
Gleichlaufachse 160
Externer Geber 80
Messtaster 40
Nocken 20
Nockenspur 160
• Motion Control Ressourcen entsprechen dem Speicher
der flexibel mit Technologieobjekten belegt wird
• Jede CPU hat eine bestimmte Anzahl an verfügbaren
Motion Control Ressourcen (z. B. S7-1515T hat 2400)
• Gleiche Mengengerüste für S7-1500 und
S7-1500 T-CPU
Auswahlhilfen:
SIZER und TIA Selection Tool
Seite 113
Mit steigender Anzahl eingesetzter Technologieobjekte benötigt die CPU mehr Rechenzeit zur
Bearbeitung der Technologieobjekte Motion Control-Zyklus wird länger.
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Achsanzahl und Performance
Anzahl Technologieobjekte / Extended Motion Control Ressourcen
Seite 114
Auswahlhilfen:
SIZER und TIA Selection Tool
Mit steigender Anzahl eingesetzter Technologieobjekte benötigt die CPU mehr Rechenzeit zur
Bearbeitung der Technologieobjekte Motion Control-Zyklus wird länger.
• Extended Motion Control Ressourcen nur für
S7-1500 T-CPU
• Extended Motion Control Ressourcen entsprechen dem
Speicher der flexibel mit Technologieobjekten belegt wird
• Jede T-CPU hat beine bestimmte Anzahl an verfügbaren
Extended Motion Control Ressourcen
(z. B. S7-1515T hat 120)
Verfügbare Extended
Motion Control Ressourcen
1511T / TF 1515T / TF 1516T / TF 1517T / TF
40 120 192 256
Technologieobjekt Bedarf
Motion Ressourcen
Kurvenscheibe 2
Kinematik 30
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Achsanzahl und Performance
Mengengerüst und Zykluszeiten (Orientierungswerte)
CPU 1511T
CPU 1511TF
Achsanzahl max.: 10 Positionierachsen
Motion Control-Zyklus: ≥ 2 ms
Achsanzahl typisch: 5 Positionierachsen in 4 ms *)
CPU 1515T
CPU 1515TF
CPU 1517T
CPU 1517TF
Achsanzahl max.: 128 Positionierachsen
Motion Control-Zyklus: ≥ 500 µs
Achsanzahl typisch: 70 Positionierachsen in 4 ms *)
Achsanzahl max.: 30 Positionierachsen
Motion Control-Zyklus: ≥ 1 ms
Achsanzahl typisch: 7 Positionierachsen in 4 ms *)
*) bei ca. 35 % CPU-Last!
CPU 1516T
CPU 1516TF
Achsanzahl max.: 80 Positionierachsen
Motion Control-Zyklus: ≥ 1 ms
Achsanzahl typisch: 55 Positionierachsen in 4 ms *)
Seite 115 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Achsanzahl und Performance
Einfluss auf Laufzeit der zyklischen Programmebene
OB1
OB Servo
OB IPO
tMotion Control-Applikationszyklus
t
OB Servo
OB IPO
OB Servo
OB IPO
OB1
tCylce time OB1
TOs benötigen ca. 1 ms
Motion Control-Applikationszyklus: 4 ms
OB1 Cycle time ohne Motion Control: 5 ms
OB1 mit Motion Control: 7,2 ms
tMotion Control-Applikationszyklus
t
OB Servo
OB IPO
OB Servo
OB IPO
OB1
tCylce time OB1
TOs benötigen ca. 1 ms
Motion Control-Applikationszyklus: 2 ms
OB1 Cycle time ohne Motion Control: 5 ms
OB1 mit Motion Control: 11,2 ms
OB Servo
OB IPO
OB Servo
OB IPO
OB Servo
OB IPO
Beispiel bezogen auf bestimmte TO-Anzahl und CPU Typ
Seite 116 Technologie-Workshop 2018 Februar 2018

SIMATIC S7-1500 T-CPU Support / Info
siemens.de/t-cpu
Februar 2018 Technologie-Workshop 2018 Seite 117

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Support / Infos 5
Migration SIMATIC S7-300 auf S7-1500 3.1
Doku-Konzept 3.2
Auswahlhilfen 3.3
Gut zu wissen … 3.4
Seite 118 Technologie-Workshop 2018
Technologieobjekte für Motion Control 3
Technische Details 4
Februar 2018

Frei verwendbar © Siemens AG 2018
Migration SIMATIC S7-300T S7-1500 T-CPU
Migrationsleitfaden
Seite 119
• Umstieg von der bisherigen
Technologie-CPU 31xT auf eine
S7-1500 T-CPU
• Vergleich der Technologien bzw.
Technologieobjekte
• Vergleich der Technologie-
funktionen / PLCopen-Bausteine
• Exemplarische Migrationen eines
STEP 7 V5.5 Anwenderprojekts mit
Hilfe des TIA Portals
• Diverse Programmier-Tipps
Effiziente Migration
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Support / Infos 5
Migration SIMATIC S7-300 auf S7-1500 3.1
Doku-Konzept 3.2
Auswahlhilfen 3.3
Gut zu wissen … 3.4
Seite 120 Technologie-Workshop 2018
Technologieobjekte für Motion Control 3
Technische Details 4
Februar 2018

Frei verwendbar © Siemens AG 2018
Doku-Konzept
Umfangreiche Dokumentation
Seite 121
Umfangreiche Dokumentation,
untergliedert in verschiedene Bereiche
• Funktionshandbücher
… mit übergreifenden Informationen zu Webserver,
Kommunikation, …
• Geräteinformationen
… mit kompakter Beschreibung, Anschlussbildern,
Kennlinien, technischen Daten, …
• Basisinformationen
… in Online-Hilfe, Systemhandbuch und Getting
Started zu Projektierung, Verdrahtung,
Inbetriebnahme, …
• Zusammenfassung in der Manual Collection:
Link
Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Doku-Konzept
Umfangreiche Dokumentation
Anwenderdokumentation
• Betriebsanleitung: SINAMICS V90, SIMOTICS S-1FL6 • https://support.industry.siemens.com/cs/de/de/view/109742519
• Getting Started: Erste Schritte V90 PN an S7-1500 Motion Control • https://support.industry.siemens.com/cs/de/de/view/109739497
• Bedienhandbuch: SINAMICS V-ASSISTANT Onlinehilfe • https://support.industry.siemens.com/cs/de/de/view/109742493
• Installationshandbuch: SIMOTICS 1FL6 Servo Motors • https://support.industry.siemens.com/cs/de/de/view/79670187
Seite 122 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Support / Infos 5
Migration SIMATIC S7-300 auf S7-1500 3.1
Doku-Konzept 3.2
Auswahlhilfen 3.3
Gut zu wissen … 3.4
Seite 123 Technologie-Workshop 2018
Technologieobjekte für Motion Control 3
Technische Details 4
Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 integriert in SIZER:
achsbezogene Projektierung; Kinematiken ab SIZER V3.18 (HMI 2018)
• S7-1500 CPUs inkl. F-/C-CPUs und ET 200SP/pro-CPUs inkl. Open Controller
• S7-1500 T-/TF-CPUs
• Schnittstelle zum TIA Selection Tool (Stücklisten-Austausch SIZER TST bzw. umgekehrt)
Auswahlhilfen
SIZER ‒ Auslegung von Antriebssystemen inkl. SIMATIC S7-1500
Seite 124
die passende CPU auf einem Blick
Filter-/Sortier-Möglichkeiten
Zuordnung SINAMICS Antriebssystem
grafische Anzeige der CPU-Auslastung
Schnellauslegung ohne Projektierung
Antriebssystem ist möglich
Technologie-Workshop 2018
Details Februar 2018

Frei verwendbar © Siemens AG 2018
SIMATIC S7-1500 inkl. Motion Control im TIA Selection Tool:
mengengerüstbezogene Projektierung / Kinematiken ab TST 2017.4 (1/2018)
• S7-1500 CPUs inkl. F-/C-CPUs und ET 200SP-CPUs inkl. Open Controller
• S7-1500 T-/TF-CPUs
• Schnittstelle zu SIZER (Stücklisten-Austausch TST SIZER bzw. umgekehrt)
Auswahlhilfen
TIA Selection Tool ‒ Auslegung TIA-Komponenten inkl. Motion Control
Seite 126
die passende CPU auf einem Blick
per Drag & Drop einfügen
Weitere Details unter „Limits“
Mengengerüst Motion Control
unter Eigenschaften angeben
Technologie-Workshop 2018
Details Februar 2018

Frei verwendbar © Siemens AG 2018
Agenda
Überblick Motion Control 1
SIMATIC S7-1500 T-CPU mit SINAMICS V90 PN 2
Support / Infos 5
Migration SIMATIC S7-300 auf S7-1500 3.1
Doku-Konzept 3.2
Auswahlhilfen 3.3
Gut zu wissen … 3.4
Seite 128 Technologie-Workshop 2018
Technologieobjekte für Motion Control 3
Technische Details 4
Februar 2018

Frei verwendbar © Siemens AG 2018
• Programmier-Styleguide
• Programmierempfehlungen für
S7-1200 und S7-1500 verfügbar als
SUP FA Workshop und als
Leitfaden im Customer Support
• Zentrale Einstiegsseite im Customer
Support Portal mit allen Informationen
zum Thema Migration:
• Leitfaden
• FAQs
• Videos
• … www.siemens.com/onlinesupport/simatic-technology
Gut zu wissen …
Programmierempfehlungen und Migrationsleitfaden
Effizient programmieren
Seite 129 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
• Zentrale Einstiegsseiten mit allen Informationen zum
Thema Motion Control
• Allgemein:
www.siemens.de/simatic-technology
• Siemens Online Support:
• Leitfaden
• FAQs
• Videos
• …
www.siemens.de/onlinesupport/simatic-technology
Gut zu wissen …
Übersichtsseiten zum Thema SIMATIC Motion Control
Effizient programmieren
Seite 130 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Gut zu wissen …
Mengengerüst Motion Ressourcen
Motion Ressourcen entsprechen dem Speicher der flexibel mit Technologieobjekten belegt wird
Jede CPU hat bestimmte Anzahl an Motion Ressourcen
Gleiche Mengengerüste für S7-1500 und S7-1500T
Verfügbare Extended Motion Control Ressourcen
Verfügbare Motion Ressourcen
Seite 131 Technologie-Workshop 2018 Februar 2018
1511T / TF 1515T / TF 1516T / TF 1517T / TF
800 2400 6400 10240
1511T / TF 1515T / TF 1516T / TF 1517T / TF
40 120 192 256
Technologieobjekt Bedarf
Motion Ressourcen
Kurvenscheibe 2
Kinematik 30
Technologieobjekt Bedarf
Motion Ressourcen
Drehzahlachse 40
Positionierachse 80
Gleichlaufachse 160
Externer Geber 80
Messtaster 40
Nocken 20
Nockenspur 160

Frei verwendbar © Siemens AG 2018
Gut zu wissen …
Motion Ressourcen
Verfügbare Motion
Ressourcen
Verbrauchte Motion
Ressourcen
Motion Ressourcen
der TOs
Seite 132 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Gut zu wissen … Taktsynchronität
Was ist zu tun im TIA Portal? S7-1500T S7-1500
Zyklischer Datenaustausch
Siemens Telegramm 105
Automatisch Taktsynchroner Betrieb
Organisationbaustein MC-Servo wählen
(geht nur wenn TO bereits angelegt ist)
1. Schritt: PN-Schnittstelle Antrieb_1
Markiere PN-Schnittstelle von Antrieb_1
1.
2.
3.
5.
6.
7.
4.
Februar 2018 Technologie-Workshop 2018 Seite 133

Frei verwendbar © Siemens AG 2018
Gut zu wissen … Taktsynchronität
Was ist zu tun im TIA Portal? S7-1500T S7-1500
Sync-Domain
Sync-Master ist PLC_1
IO-Devices sind Sync-Slave
RT-Klasse auf IRT stellen
---- WICHTIG !!! ---
Topologie muss projektiert sein
(in Topologiesicht)
2. Schritt: PN/IE_1 markieren
Markiere PN/IE_1
1.
2. 3.
5.
4.
Februar 2018 Technologie-Workshop 2018 Seite 134

Frei verwendbar © Siemens AG 2018
Gut zu wissen … Taktsynchronität
Was ist zu tun im TIA Portal? S7-1500T S7-1500
Einstellung Zykluszeit
Synchron zum Bus
Faktor passend zur Applikation wählen,
typisch bei zwei Pos-Achsen Faktor 2
ausreichend
3. Schritt: MC-Servo [OB91]
Rechtsklick:
Eigenschaften
2. 3.
4.
Februar 2018 Technologie-Workshop 2018 Seite 135

Frei verwendbar © Siemens AG 2018
Seite 136 Technologie-Workshop 2018 Februar 2018

Frei verwendbar © Siemens AG 2018
Markus Geiger
RC-DE DF FA 2 PROM
Weissacher Str. 11
70499 Stuttgart
Telefon: +49 (711) 137-2253
E-Mail:
Vielen Dank für Ihre Aufmerksamkeit!
siemens.com/t-cpu


















