END-TERM EXAMINATION, IIT HYDERABADashok/VD/End_Sem_2015_Sol.docx · Web vieware the deceleration...
11
END-TERM EXAMINATION, IIT HYDERABAD ME 5670 – Vehicle Dynamics Date: 20/04/2015 Maximum Marks – 40 Time duration: 3 hours Instructions: i) All questions are compulsory. ii) Only calculator is allowed in the examination room. 1. For the Magic formula of the tire given by Marks: 1+1+3+3=8 y ( x) =D sin { C tan −1 [ Bx−E ( Bx−tan −1 ( Bx ) )] } where, Y=y+S v , x=X+S h , a) Define the variables Y and X related with the tire. b) Draw a typical graph of y vs x showing Y, X, and other the important regions. c) Mention the significance of coefficients D, C, B, BCD, E, S v , and S h . d) Compute the lateral force for a slip angle of 10 o using the Magic formula for a tire with coefficients B=0.239, C=1.19, D=3650, E = - 0.678, S h = - 0.049, S v = -156, BCD = 1038. 2. A passenger car, which is moving on a level road, has a weight W acting at its center of gravity which is located at a height h from the road surface, a distance l 1 from the front axle and l 2 from the rear axle, such that l 1 +l 2 =l is the distance between the axles. On the application of the ********* Good Luck************
Transcript of END-TERM EXAMINATION, IIT HYDERABADashok/VD/End_Sem_2015_Sol.docx · Web vieware the deceleration...

END-TERM EXAMINATION, IIT HYDERABAD
ME 5670 – Vehicle Dynamics Date: 20/04/2015
Maximum Marks – 40 Time duration: 3 hours
Instructions:
i) All questions are compulsory. ii) Only calculator is allowed in the examination room.
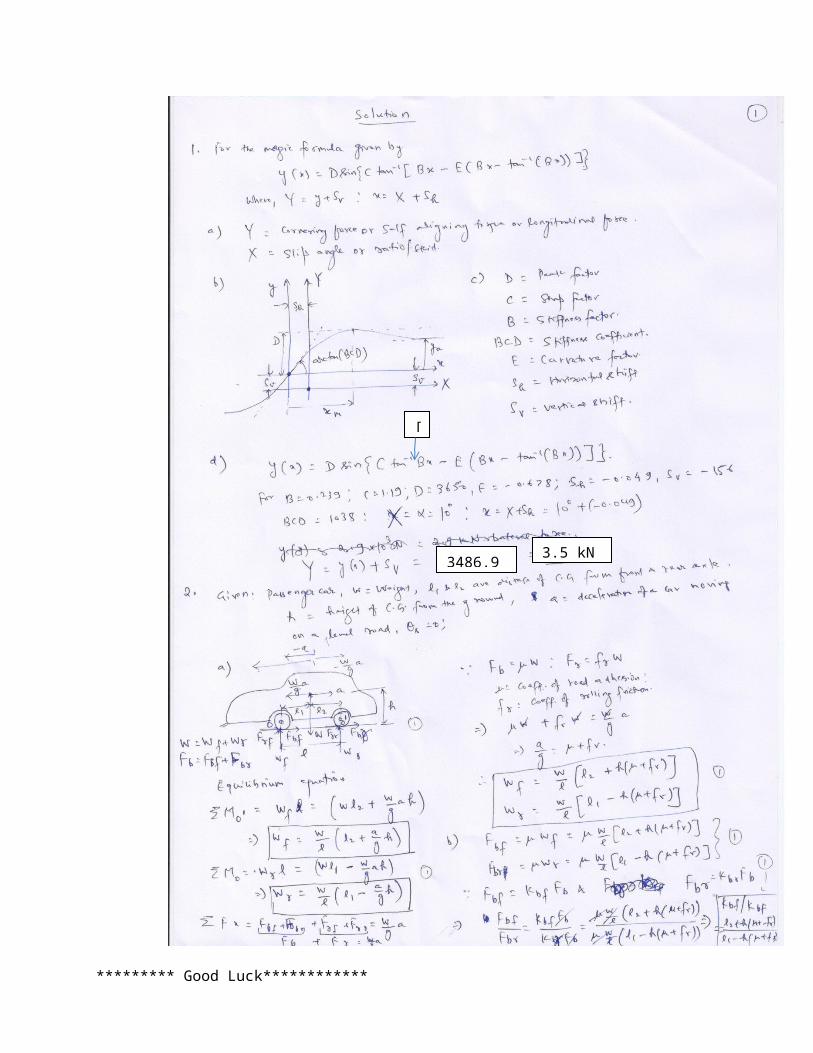
1. For the Magic formula of the tire given by Marks: 1+1+3+3=8
y ( x )=D sin {C tan−1 [Bx−E (Bx− tan−1 (Bx ) )]} where, Y=y+Sv, x=X+Sh,
a) Define the variables Y and X related with the tire.b) Draw a typical graph of y vs x showing Y, X, and other the important regions.c) Mention the significance of coefficients D, C, B, BCD, E, Sv, and Sh.d) Compute the lateral force for a slip angle of 10o using the Magic formula for a tire
with coefficients B=0.239, C=1.19, D=3650, E = - 0.678, Sh= - 0.049, Sv= -156, BCD = 1038.
2. A passenger car, which is moving on a level road, has a weight W acting at its center of gravity which is located at a height h from the road surface, a distance l1 from the front axle and l2 from the rear axle, such that l1+l2=l is the distance between the axles. On the application of the brake, if a is the deceleration of the car, then do the following: Marks: 3+2+3+2=10a) Draw the FBD of the car and write the equilibrium equations to obtain the normal
loads acting at the front wheel, Wf, and rear wheel, Wr, in terms of μ, the coefficient of road adhesion, and fr , the coefficient of rolling resistance. Neglect the air drag, transmission resistance, etc.
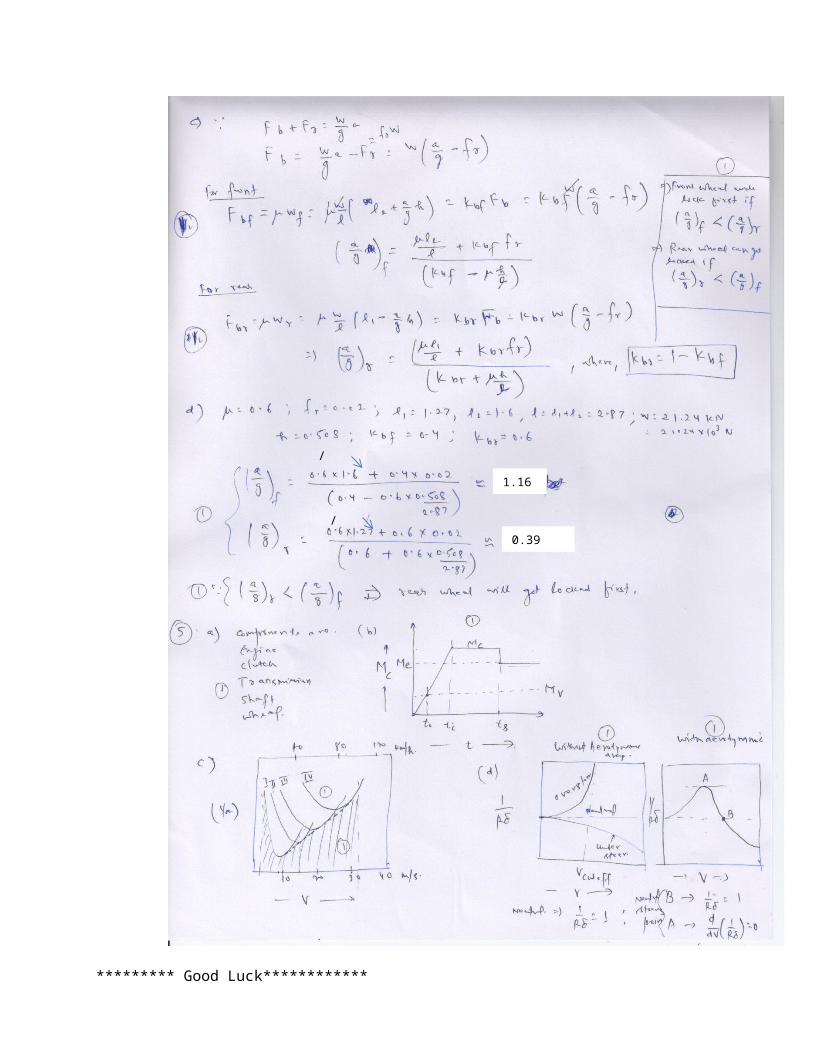
b) Find the braking force acting at the front wheels/axle, Fbf, and rear wheels/axle, Fbr. If Kbf and Kbr are the proportion of total braking force acting at the front and rear wheels then also find the ratio of Kbf/Kbr. Finally, define the condition of ideal braking.
c) If af and ar are the deceleration of front and rear wheels, respectively, then obtain their expression. Also mention the condition under which either the front or rear wheel locks first.
d) Using the results of (c), determine the set of tires which will lock first if μ=0.6 , fr = 0.02, l1=1.27 m, l2=1.6 m, W=21.24 kN, h = 0.508 and Kbf=0.4.
********* Good Luck************

3. Answer the following: Marks: (1+3+4¿=8
a) How do you characterize the comfort performance of a vehicle?b) To analyze the comfort of a vehicle, describe 1 DOF, 2DOF, and 3 DOF quarter car
models.c) Using 1 DOF quarter car model, obtain the optimal damping factor of a passive
suspension system.
4. Answer the following: Marks: (3+1+4¿=8
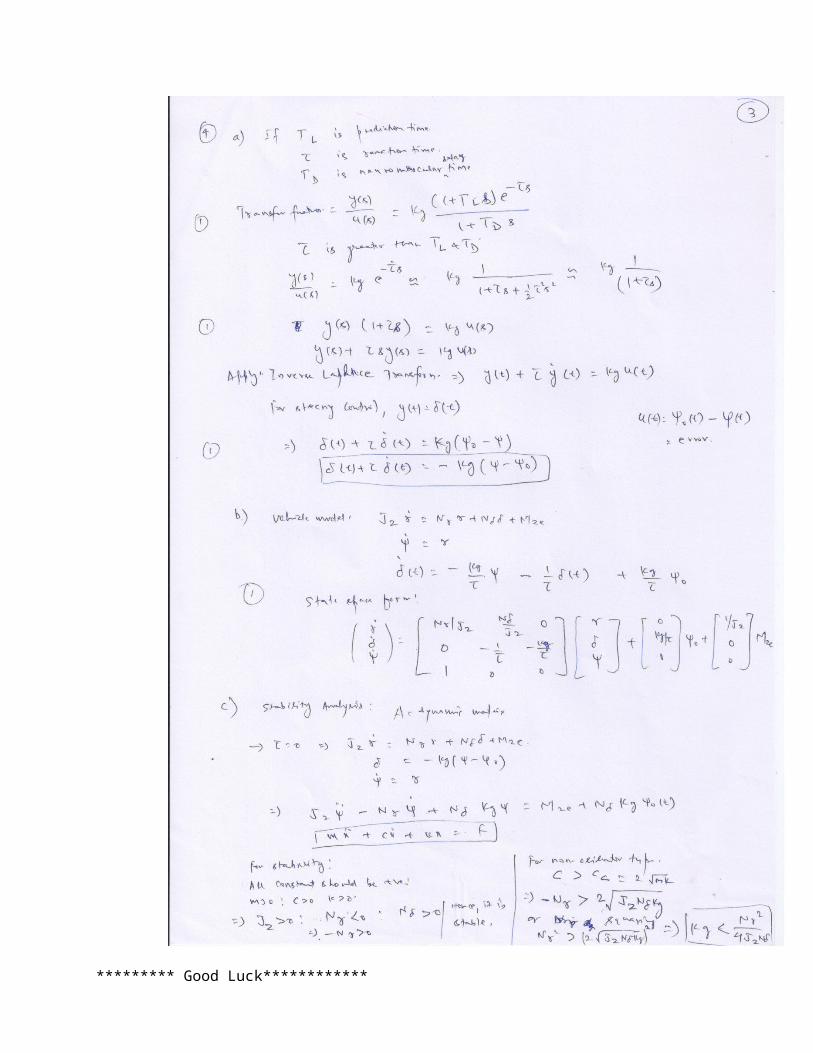
a) For the steering control of a vehicle, mention the open loop transfer function of a driver model, if τ is the reaction time, TD is the neuromuscular delay, TL is the prediction time, and Kg is the gain. Also obtain approximate driver model when the reaction time τ is dominant as compared to other time delays.
b) Using the vehicle model under neutral steering condition as J z r=N r r+N δ δ+M ze, where, N r<0 , N δ>0, are derivatives of stability, J z is the polar moment of inertia for the Yaw motion ψ, r is the angular velocity of Yaw motion, obtain the state space form of the driver-vehicle model.
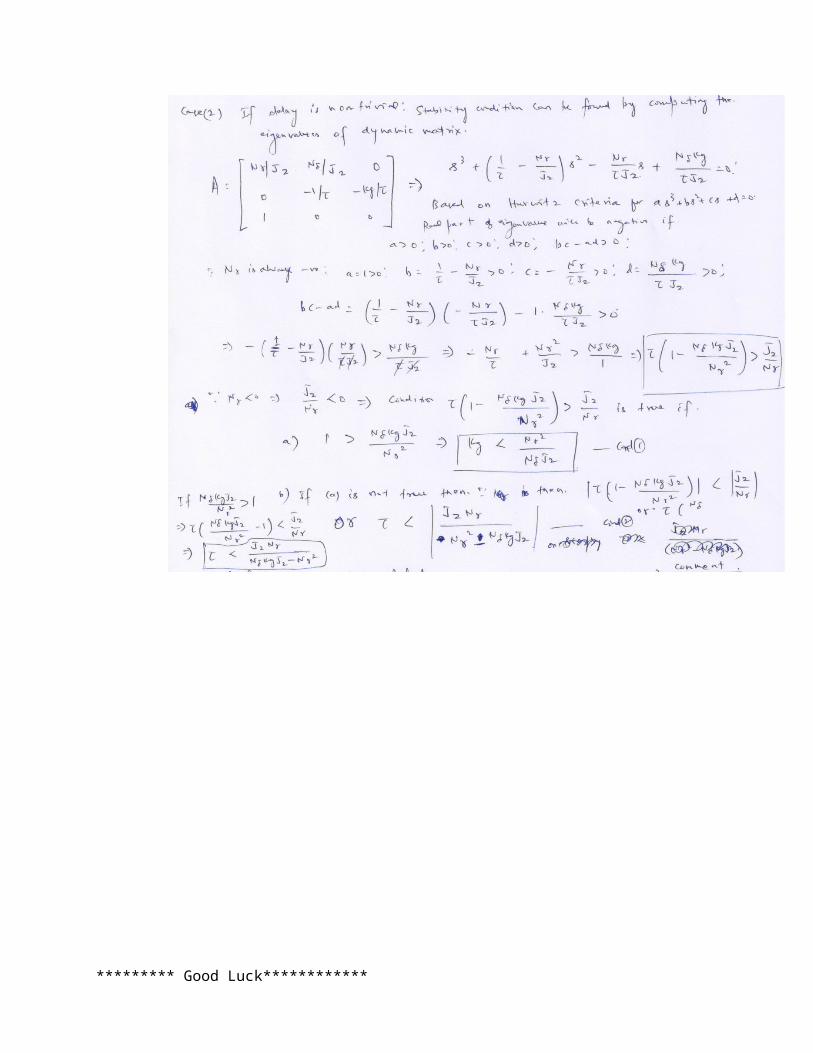
c) Using the resulting equation in b), obtain the stability conditions of vehicle in terms of Kg and/or τ , when the reaction time, τ , of the driver is zero and non-zero, separately.
5. Answer the following: Marks: (1+1+2+2¿=6
a) Mention the main components of a vehicular driveline.
b) For an equivalent engine-clutch-vehicle driveline model, draw the variation of clutch torque (Mc) versus time when a vehicle starts from the rest.
c) For a four gear passenger car, draw the inverse of its acceleration (1/a) versus its velocity (V) under the first, second, third and fourth gears, respectively. Also show the region under which the transmission time is minimized.
d) Draw the curve of path curvature gain (1/Rδ) versus vehicle velocity (V) for understeering, neutral steering and over steering conditions with and without the presence of the aerodynamic drag.
********* Good Luck************
********* Good Luck************
3486.9 N3.5 kN
[
********* Good Luck************
/2.87
/2.87
1.167
0.39
********* Good Luck************
********* Good Luck************
3. (a)
(b)
********* Good Luck************
(c)
********* Good Luck************