
Encoder 2011
16
Sincro y Servomecanismo s ESPEL Latacunga Ing. José Bucheli DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN SINCRO Y SERVOMECANISMOS SENSORES DE POSICIÓN Y VELOCIDAD LATACUNGA 2011
Transcript of Encoder 2011

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 1/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
SINCRO Y SERVOMECANISMOS
SENSORES DE POSICIÓN YVELOCIDAD
LATACUNGA 2011

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 2/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
ESCUELA POLITÉCNICA DEL EJERCITODEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA
SINCRO Y SERVO MECANSIMOS
Sensor analógico de posición (potenciómetro)
Sensor analógico de velocidad (tacogenerador)
Sensor digital de velocidad (tren de pulsos) Sensor digital de posición (encoder)
SENSOR ANALÓGICO DE POSICIÓN (POTENCIÓMETRO)
El sensor analógico de posición está basado en un potenciómetro (resistencia
variable). El circuito representativo es el siguiente:
La figura representa una resistencia conectada a +10V por uno de sus extremos y a –
10V por el otro. El cursor o aguja gira solidario con el eje del cual queremos conocer la

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 3/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
posición. La tensión de salida VSAL tomará valores entre –10V y +10V en función del
ángulo girado por el eje.
SENSOR ANALÓGICO DE VELOCIDAD
El sensor analógico de velocidad está basado en un tacogenerador. Al igual que en el
caso del potenciómetro, el sensor nos ofrece una tensión proporcional a la magnitud
que queremos medir.
En este caso, la magnitud a medir es la velocidad angular w, y la tensión de salida
VSAL ofrecida por el tacogenerador es proporcional a esa velocidad
El tacómetro puede ser un generador de CC adosado al mismo eje, y por lo general
integrado en la misma carcasa con el motor, o también de CA
8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 4/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
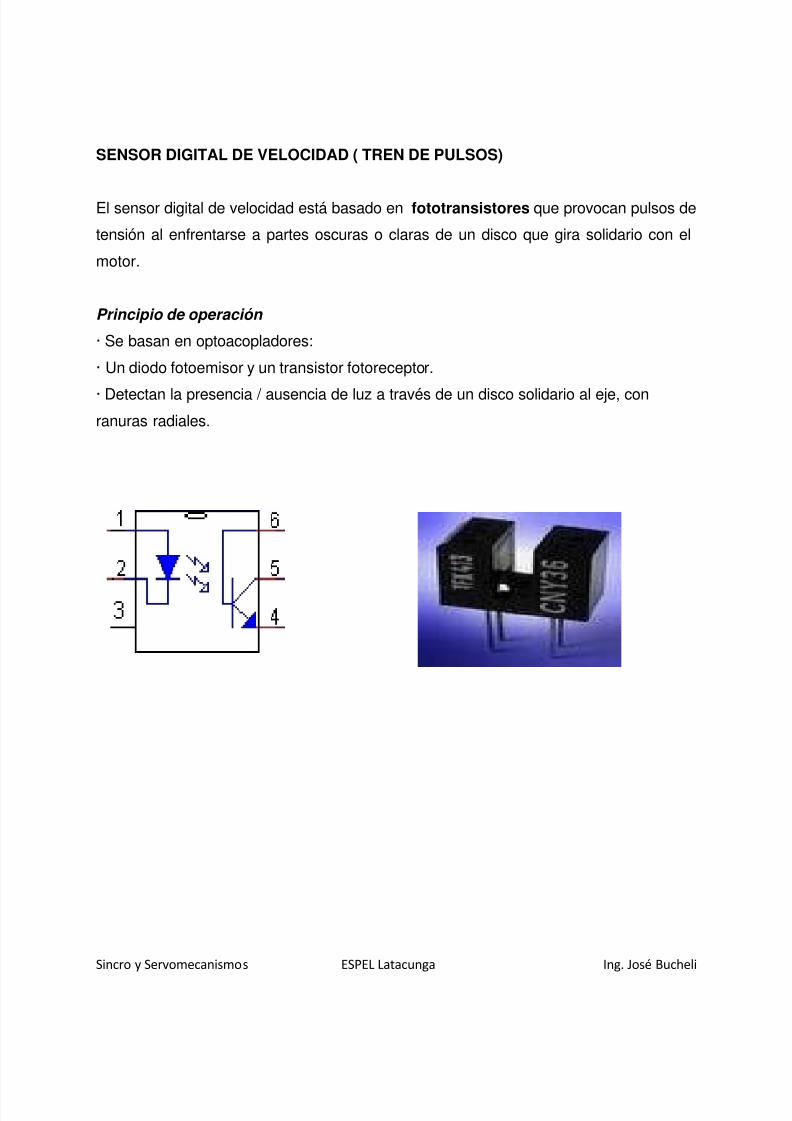
SENSOR DIGITAL DE VELOCIDAD ( TREN DE PULSOS)
El sensor digital de velocidad está basado en fototransistores que provocan pulsos de
tensión al enfrentarse a partes oscuras o claras de un disco que gira solidario con el
motor.
Principio de operación
· Se basan en optoacopladores:
· Un diodo fotoemisor y un transistor fotoreceptor.
· Detectan la presencia / ausencia de luz a través de un disco solidario al eje, con
ranuras radiales.

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 5/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
SENSORES DE VELOCIDAD MAGNETICOS
Los sensores de velocidad magnéticos (pickup) son utilizados para detectar
revoluciones de motor proporcionando información en tiempo real para el gobernador
de velocidad electrónico. También se utiliza para proporcionar datos de paro de motor

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 6/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
de arranque o protección por sobre velocidad en los controles de arranque Existen
modelos con muy diversos tamaños y conectores.

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 7/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
1. Cuerpo del distribuidor
2. Pick−up o impulsor 3. Rueda dentada
4. Imán permanente
5. Núcleo de hierro

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 8/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
CONTROL MEDIANTE SENSORES DE EFECTO HALL
1. Pantalla obturadora
2. Pastíla HALL
3. Eje del distribuidor
4. Imán permanente
5. Conector eléctrico

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 9/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
SENSOR DIGITAL DE VELOCIDAD Y POSICIÓN
(ENCODER)
DESCRIPCIÓN GENERAL
Uno de los principales problemas que plantea el uso de sensores de efecto Hall en el
control de motores, es la poca precisión que permiten obtener para determinar la
posición del rotor.

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 10/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
Cuando se desea obtener mejores rendimientos del motor o un mayor control sobre los
parámetros característicos del mismo, se necesita utilizar un elemento de feedback
más preciso como por ejemplo un encoder.
Existen encoders de varias tipologías y resoluciones: lineales, rotatorios, magnéticos,
ópticos, incrementales, absolutos, monovuelta, multivuelta, etc.
Los encoders son los elementos de feedback más utilizados hoy en día en las
aplicaciones de control de motores que requieren precisión, por su buena relación
coste/prestaciones así como su facilidad de uso e integración.
El encoder es un transductor rotativo que transforma un movimiento angular en una
serie de impulsos digitales. Estos impulsos generados pueden ser utilizados para
controlar los desplazamientos de tipo angular o de tipo lineal. Las señales eléctricas de
rotación pueden ser elaboradas mediante controles numéricos (CNC), contadores
lógicos programables (PLC), sistemas de control etc.
Se basan en optoacopladores:
Un diodo fotoemisor y un transistor fotoreceptor.
Detectan la presencia / ausencia de luz a través de un disco solidario al eje, con
ranuras radiales.
8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 11/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
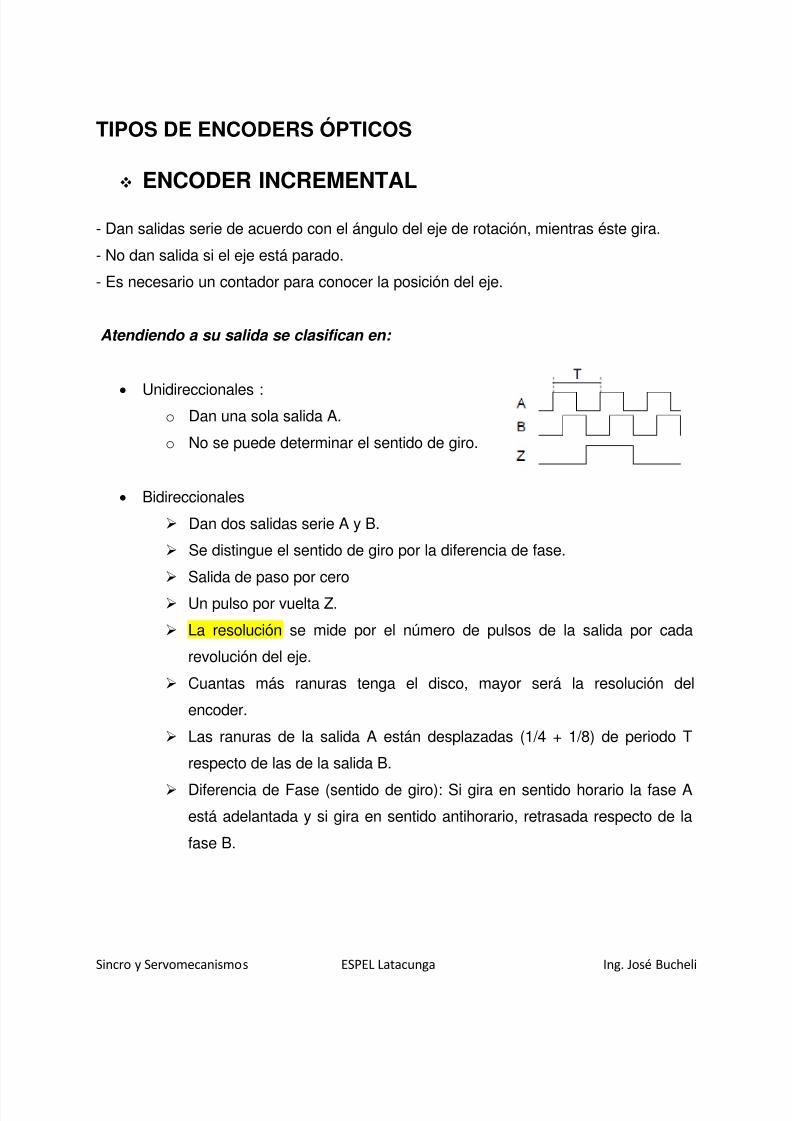
TIPOS DE ENCODERS ÓPTICOS
ENCODER INCREMENTAL
- Dan salidas serie de acuerdo con el ángulo del eje de rotación, mientras éste gira.
- No dan salida si el eje está parado.
- Es necesario un contador para conocer la posición del eje.
Atendiendo a su salida se clasifican en:
Unidireccionales :o Dan una sola salida A.
o No se puede determinar el sentido de giro.
Bidireccionales
Dan dos salidas serie A y B.
Se distingue el sentido de giro por la diferencia de fase.
Salida de paso por cero
Un pulso por vuelta Z.
La resolución se mide por el número de pulsos de la salida por cada
revolución del eje.
Cuantas más ranuras tenga el disco, mayor será la resolución del
encoder.
Las ranuras de la salida A están desplazadas (1/4 + 1/8) de periodo T
respecto de las de la salida B.
Diferencia de Fase (sentido de giro): Si gira en sentido horario la fase A
está adelantada y si gira en sentido antihorario, retrasada respecto de la
fase B.

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 12/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
·
En el estator hay como mínimo dos pares de fotorreceptores ópticos, escalados un
número entero de pasos más ¼ de paso. Al girar el rotor genera una señal cuadrada, el
escalado hace que las señales tengan un desfase de ¼ de periodo si el rotor gira en un
sentido y de ¾ si gira en el sentido contrario, lo que se utiliza para discriminar el sentido
de giro.
Un simple sistema lógico permite determinar desplazamientos a partir de un origen, a
base de contar impulsos de un canal y determinar el sentido de giro a partir del desfase
entre los dos canales. Algunos encoders pueden disponer de un canal adicional que
genere un pulso por vuelta y la lógica puede dar número de vueltas más fracción de
vuelta.
8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 13/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
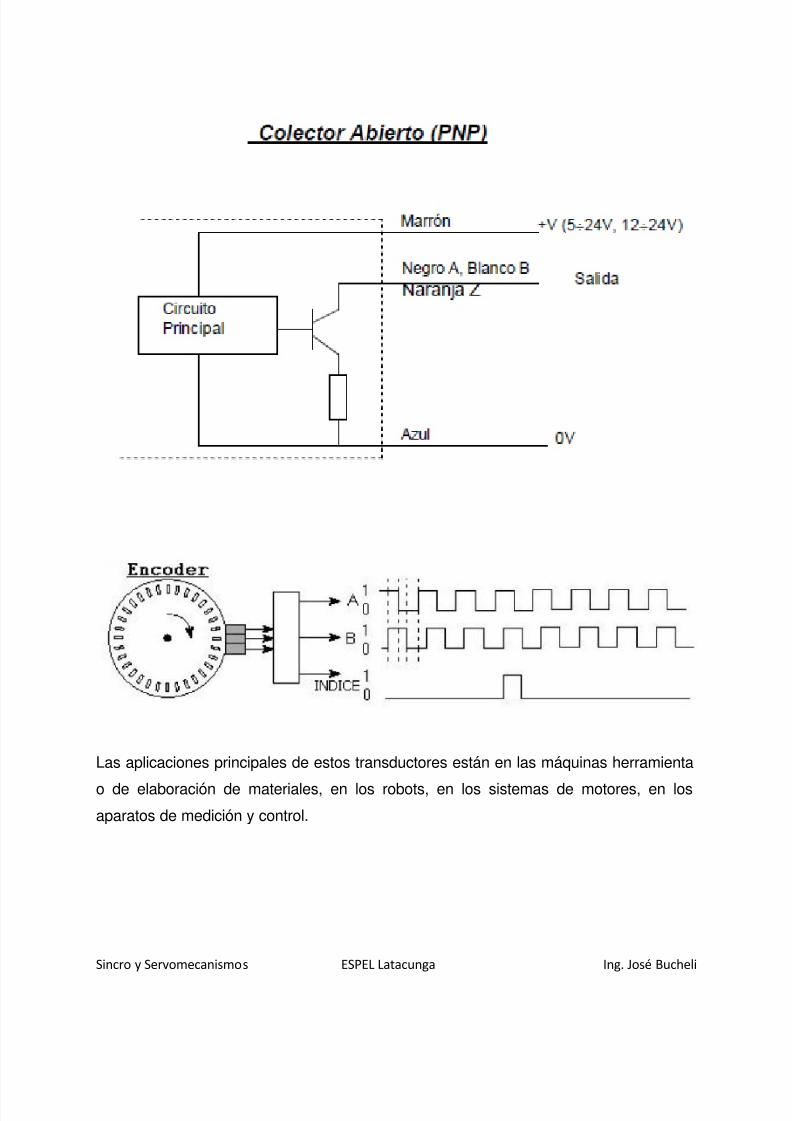
Las aplicaciones principales de estos transductores están en las máquinas herramienta
o de elaboración de materiales, en los robots, en los sistemas de motores, en los
aparatos de medición y control.
8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 14/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
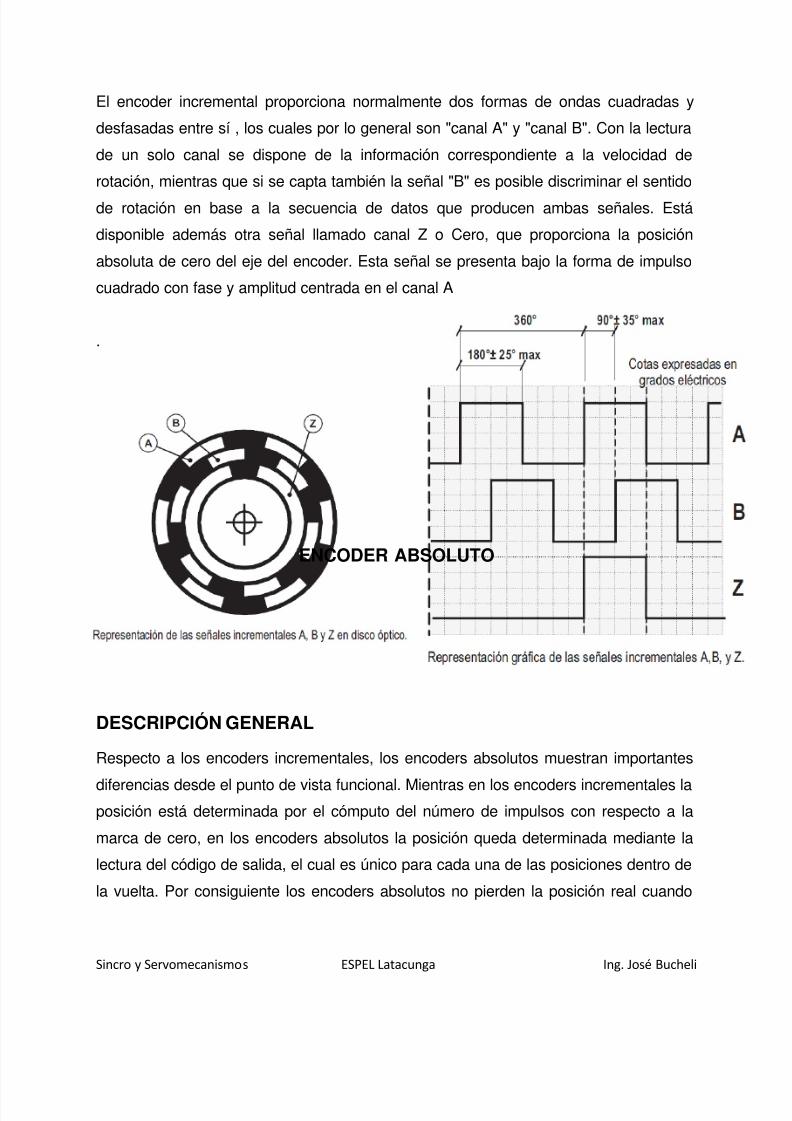
El encoder incremental proporciona normalmente dos formas de ondas cuadradas y
desfasadas entre sí , los cuales por lo general son "canal A" y "canal B". Con la lectura
de un solo canal se dispone de la información correspondiente a la velocidad de
rotación, mientras que si se capta también la señal "B" es posible discriminar el sentido
de rotación en base a la secuencia de datos que producen ambas señales. Está
disponible además otra señal llamado canal Z o Cero, que proporciona la posición
absoluta de cero del eje del encoder. Esta señal se presenta bajo la forma de impulso
cuadrado con fase y amplitud centrada en el canal A
.
ENCODER ABSOLUTO
DESCRIPCIÓN GENERAL
Respecto a los encoders incrementales, los encoders absolutos muestran importantes
diferencias desde el punto de vista funcional. Mientras en los encoders incrementales la
posición está determinada por el cómputo del número de impulsos con respecto a la
marca de cero, en los encoders absolutos la posición queda determinada mediante la
lectura del código de salida, el cual es único para cada una de las posiciones dentro de
la vuelta. Por consiguiente los encoders absolutos no pierden la posición real cuando
8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 15/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
se corta la alimentación (incluso en el caso de desplazamientos), hasta un nuevo
encendido (gracias a una codificación directa en el disco), la posición está actualizada y
disponible sin tener que efectuar, como en el caso de los encoder incrementales la
búsqueda del punto de cero
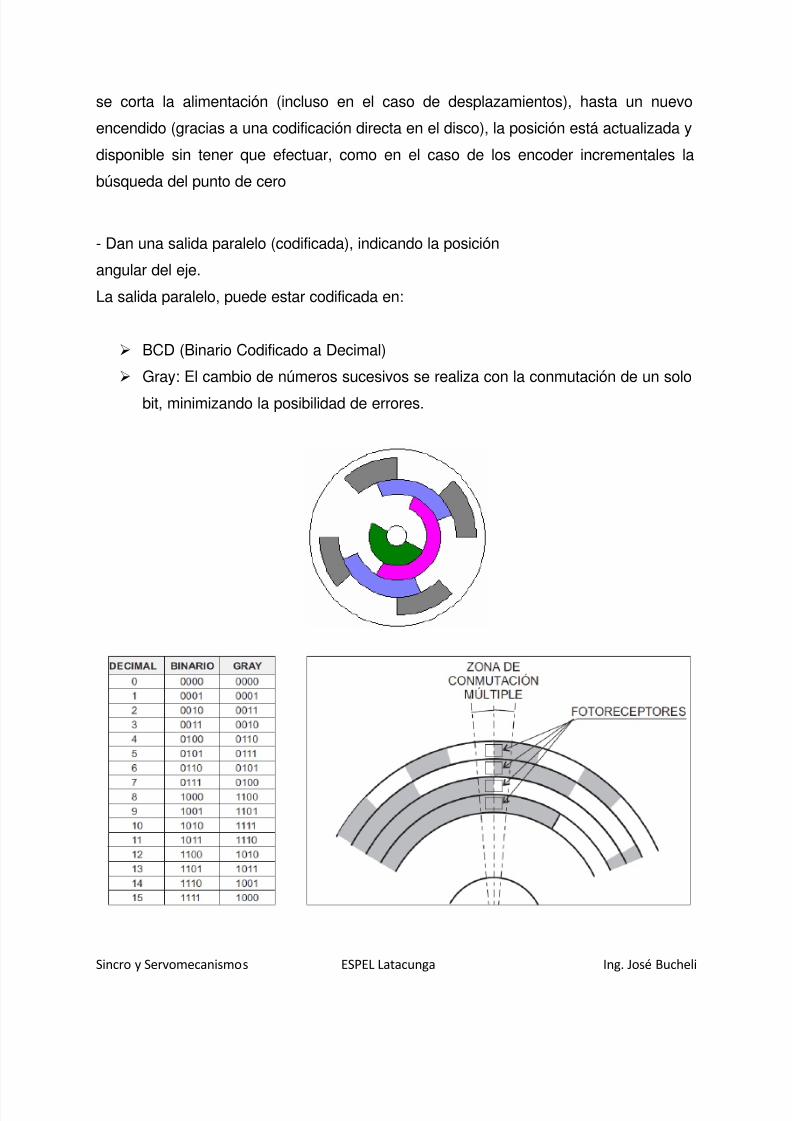
- Dan una salida paralelo (codificada), indicando la posición
angular del eje.
La salida paralelo, puede estar codificada en:
BCD (Binario Codificado a Decimal)
Gray: El cambio de números sucesivos se realiza con la conmutación de un solo
bit, minimizando la posibilidad de errores.

8/3/2019 Encoder 2011
http://slidepdf.com/reader/full/encoder-2011 16/16
Sincro y Servomecanismos ESPEL Latacunga Ing. José Bucheli
Los encoders pueden ser utilizados en una gran variedad de aplicaciones. Actúan
como transductores de retroalimentación para el control de la velocidad en motores,
como sensores para medición, de corte y de posición. A continuación se relacionan
algunos ejemplos:
• Dispositivo de control de puertas
• Robótica
• Plotter
• Soldadura ultrasónica
• Maquinas de ensamblaje, • Maquinas etiquetadoras • Indicación x/y
• Dispositivos de análisis
• Maquinas taladradoras
• Maquinas mezcladoras
• Equipo medico


















