Emulsion Scanning System “SUTS”. Follow Shot Optics.
20
Emulsion Scanning System “SUTS”
-
date post
21-Dec-2015 -
Category
Documents
-
view
220 -
download
1
Transcript of Emulsion Scanning System “SUTS”. Follow Shot Optics.

Emulsion Scanning System
“SUTS”

Follow Shot Optics

Non-stop tomographic image taking(follow shot method)
• Use Ultra High Speed Camera– Up to 3k frames per second.
Max 100views/secMax 100views/sec ~~60cm60cm22/h/h
• Image taking by follow shot– No go-stop operationNo go-stop operation to avoid a
mechanical bottleneck.– FOV displacement and Blur are
canceled by moving lens

Real-time Image Filtering and Packing ProcessorArrange readout segments
to lines
FIR filtersRing frame buffers
Spatial filter and Pixel Packing
LVDS Camera Interface
LVDS Output Interface
Camera In

Programmable Real Time FIR filter
Ref. GC2011A 3.3V DIGITAL FILTER CHIP DATASHEET, GRAYCHIP, INC.
Pixel Data Input
Pixel Data
Output
• Max. 31 taps ODD filter / 32 taps EVEN filter can be programmable.
• Programmable gain control can reduce the complexity of brightness control.

Processing speed : Up to 30cm2/h/board
SUTS Track recognition board
Internal Band width 21Gbyte/s/FPGA ×11

SUTS block diagram
CameraCamera front end image processor
Track recognitionMASTER PC
Slave PC
Slave PC
Piezo driver
Stage
Piezo
1.3GB/s
6-10MB/s
150-300MB/s
Lamp
Slave PC

Scanning Efficiency Check Sample : double refreshed half size OPERA film exposed cosmic rays
pl1
2
3
4
Cosmic ray
1. Pick up prediction tracks (pl1-pl2-pl4)2. Search pl3 for basetrack (2sufaces) window : dx,dy < +-3micron dthx,dthy < +-70mrad
Exist or not
ID
Scanning area
B 10mm x 10mm
Base Track Eff. Corresponds to sqrt of CSD eff.
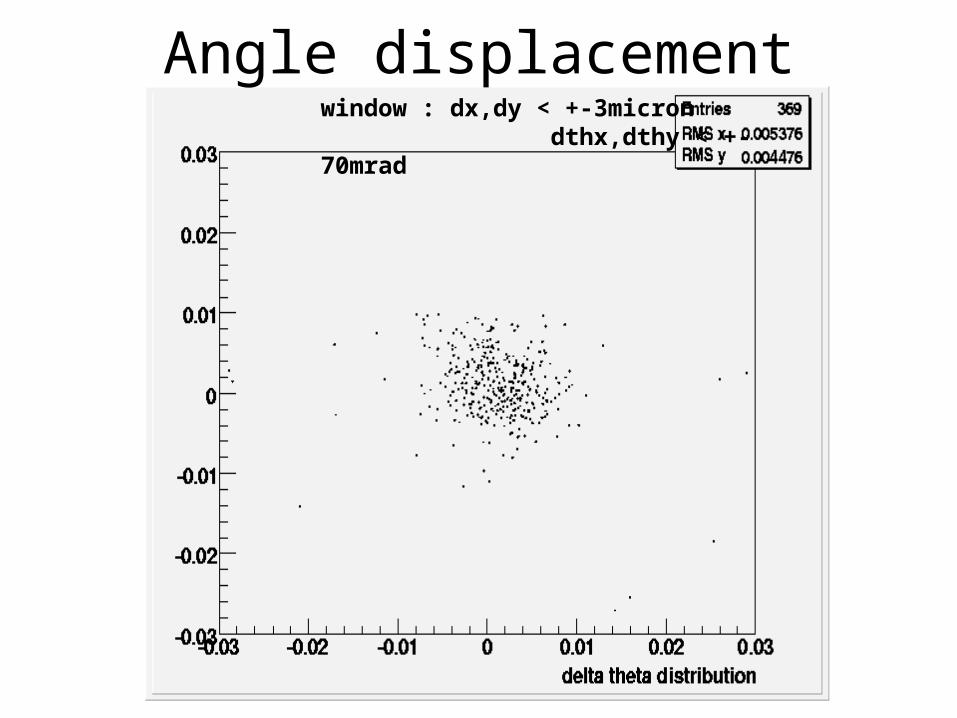
window : dx,dy < +-3micron dthx,dthy < +-70mrad
Angle displacement

Micro track angle resolution
16.2mrad 16.1mrad 16.3mrad 17.0mrad
Lens side
9.0mrad 13.0mrad 15.0mrad 14.8mrad
X proj <0.1 X proj 0.1<<0.2 X proj 0.2<<0.3 X proj 0.3<<0.4
Y proj <0.1 Y proj 0.1<<0.2 Y proj 0.2<<0.3 Y proj 0.3<<0.4

Base Track angle resolution
3.2mrad 3.6mrad 3.7mrad 4.4mrad
3.5mrad 3.2mrad 3.7mrad 4.1mrad
X proj <0.1 X proj 0.1<<0.2 X proj 0.2<<0.3 X proj 0.3<<0.4
Y proj <0.1 Y proj 0.1<<0.2 Y proj 0.2<<0.3 Y proj 0.3<<0.4

micronmicron
Base Track position resolution

window : dx,dy < +-3micron dthx,dthy < +-70mrad
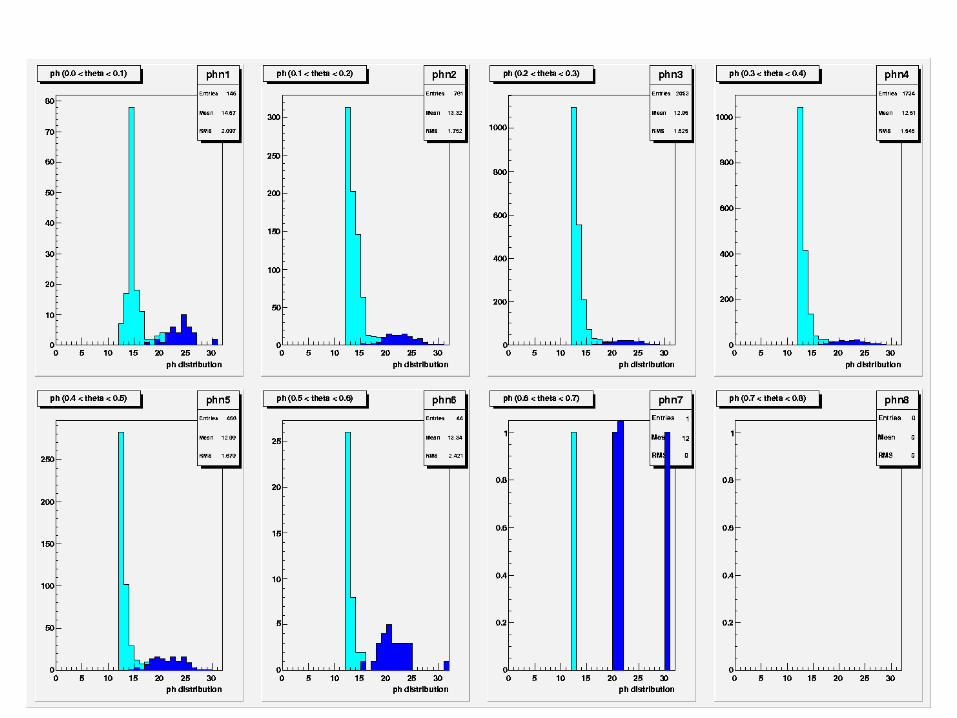
Ph sum cut 0.0<=angle<0.1 : 16 0.1<=angle<0.2 : 16 0.2<=angle<0.3 : 14 0.3<=angle<0.4 : 14 0.4<=angle : 13
Base Track Efficiency
90% (= 81% @CSD)
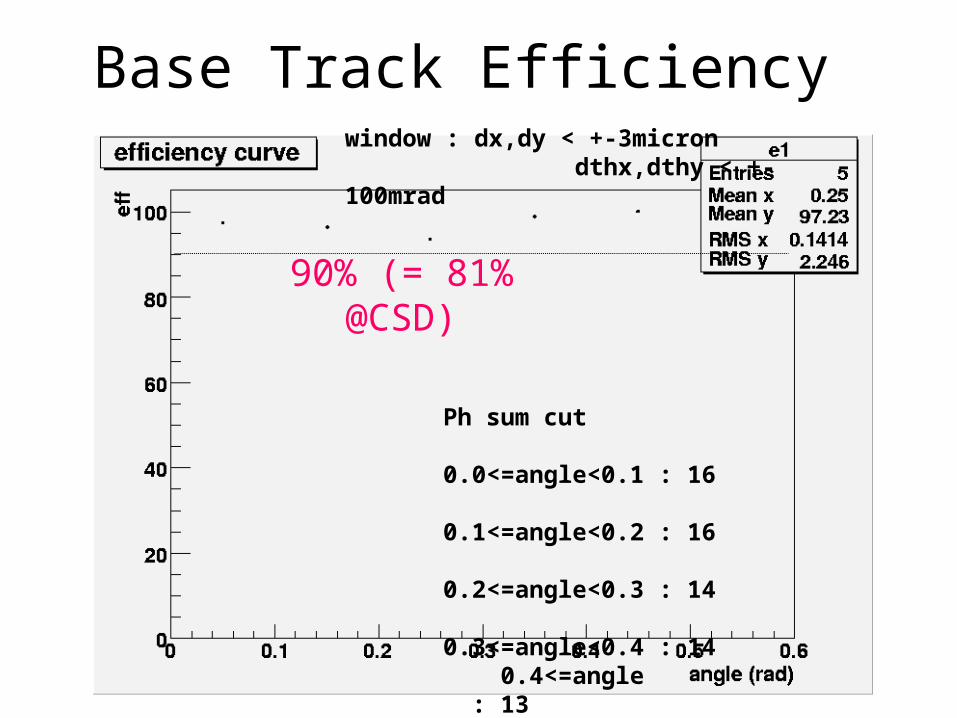
Ph sum cut 0.0<=angle<0.1 : 16 0.1<=angle<0.2 : 16 0.2<=angle<0.3 : 14 0.3<=angle<0.4 : 14 0.4<=angle : 13
window : dx,dy < +-3micron dthx,dthy < +-100mrad
Base Track Efficiency
90% (= 81% @CSD)


The 2nd S-UTS @20cm2/h (30views/sec)

The 2nd S-UTS @40cm2/h (60views/sec)

Conclusion and Prospects• 2 S-UTS are ready. The 2nd S-UTS achieved 40cm2/h of
Speed by using ×50 Objective. • Processing speed will be improved.
– Camera occupancy is ~35% @40cm2/h,×50Objective.– New code for FPGA (×2 processing power is expected by
double pipe-lines) will be available soon. Logic synthesize has been finished. Verifications are on going by simulator.
– Increasing processing board is possible if necessary.• There is possibility to enlarge FOV down to 35-40 by
using current objective and Piezo driver. More less magnification by using other optics.
• 5 SUTS processing boards are ready. Stage constructions are on going.

Schedule of SUTS setup
• Currently two SUTS is working in 20cm2/h.– 2nd stage already tested in 40cm2/h mode with
50x FOV lens.
• Number of SUTS will increase one / month.– March we will have 5 in total.