Embedded systems and machine learning techniques for...
1
www.postersession.com Injuries and trauma to the human joints commonly require surgical treatment followed by post-operative physical therapy rehabilitation. Devices, such as continuous passive motion machines (CPM), are used for rehabilitation in hospitals, clinics or general practices and they are important supplements to medical and therapeutic treatment. Their mode of operation is to move injured joint over a range of motion in a circular periodical way defined by the physician. For example in case of elbow and fist joints, these devices impose movement via flexion/extension and/or pronation/supination to the injured joint (Figure 1). Embedded systems and machine learning techniques for controlling motor physiotherapy rehabilitation devices Using embedded systems on processing EEG towards control of continuous passive motion devices Gregory Kalogiannis (1); George Hassapis (1) Organization(s): 1: Aristotle University of Thessaloniki, Department of Electrical and Computer Engineering, Greece 1: [email protected], 2: [email protected] Future Work Introduction Processing of EEG signals YouTube presentation Author contact details Processing of inspected EEG for making easier the extraction of desired features is ponderous. There are methods that are used to improve the quality of Signal to Noise Ratio (SNR), such as Common Average Referencing (CAR). Resampling the data, filtering, bad channel detection, Independent Component Analysis (ICA), epoching continuous data, and epoch rejection are the most common techniques in the processing stage of EEG recordings. During imagery motor movement tasks, the so called mu and beta event- related desynchronization (ERD) and event-related synchronization (ERS) are taking place. Recognizing these ERD/ERS patterns (Figure 2) inside the recorded EEG, that can be brief movement imagery or continuous movement imagery, allow us to recognize allow us to determine human patient imaginary movement. During this study we he have implemented and tested a new EEG processing technique, focused on event related desynchronization and synchronization (ERS/ERD) phenomena, fast enough to run within the time limits imposed by the on-line control of the continuous passive devices. The processing technique is based on locating feature vectors that correspond to power and energy spectrum of the identified ERD/ERS pattern in the EEG signals. The amplitude of these vectors can be used as a feature to stop or adjust the motion angle of the CPM device. Supervising Learning Models Classification of human will movement, is implemented using machine learning techniques such as Support Vector Machines. The SVM algorithm has been widely applied in the biological and other sciences. Support Vector Machines are based on the concept of decision planes that define decision boundaries. A decision plane is one that separates sets of objects having different class memberships. Binary Support Vector Machine (SVM) was used as the supervised learning model. During the offline procedure, prerecorded EEG data is used as training data to produce supporting vectors for human movement classification. Online procedure focuses on capturing, processing and classifying the real time potential movement and creating out of this information the signal that controls the motors of the rehabilitation device. System implementation For the implementation of the proposed system (Figure 3), the Raspberry Pi 2 single-board computer was used. This system features a Broadcom system on a chip (SoC), which includes an ARM compatible central processing unit (CPU, quad-core Cortex-A7 CPU running at 900 MHz) and an on chip graphics processing unit (GPU, a VideoCore IV). Secure Digital (SD) card is used to store a UNIX based (Ubuntu Desktop 14.04 LTS) operating system, where training data is stored on an external solid state hard drive. For communicating with the MAXON type motors of the CPM device, two EPOS motor positioning controllers are connected to the system using the RS-232 protocol. These two controllers are used to transfer the control signal to the motors of the rehabilitation CPM device. EEG data is captured using the Emotiv EPOC Headset, a 14 channel wireless EEG, designed for Brain Computer Interface (BCI) applications. The headset creates dense array of high quality raw EEG data. System programming is performed using the Robotics Operation System (ROS, Version Indigo), a collection of software frameworks for robot software development, providing operating system-like functionality and C++ programming language. Processing of EEG signal and Supervising Learning Models are time consuming procedures. In order to create signal controls within the time limits imposed by the requirements of real-time control of rehabilitation devices, different and faster hardware implementation must be used. In future work we proposed the transformation of the current architecture, using different hardware implementation such as the ZYNQ SoC architecture. Zynq®-7000 All Programmable SoC (AP SoC) devices integrate the software programmability of an ARM®-based processor with the hardware programmability of an FPGA, enabling key analytics and hardware acceleration while integrating CPU and mixed signal functionality on a single device. This programmable SoC integrates the software programmability of a processor with the hardware programmability of an FPGA whilst providing us with system performance, flexibility, and scalability. Application Links Although their indisputable contribution to rehabilitation, it is believed that the overall treatment time can be reduced and the overall rehabilitation could be improved if the patient interacts with these devices and their motion is determined according to patient’s will. These devices allow their easy connection with controllers which can make the devices to follow trajectories determined by processing the generated by the patient brain signals in order to extract the patient’s intensions and will. The implementation of such an architecture requires fast recognition of the motor imagery movements of the joint in order to create the appropriate control signals. This can be done by processing the Electroencephalography (EEG) data with the purpose of removing the noise and information that is not essential for creating the control signal. In this study we propose a new embedded system that focuses on processing EEG, fast enough to run within the time limits imposed by the on-line control of the continuous passive devices. This system use machine learning techniques such as Support Vector Machine (SVM) in order to classify human will to move its limb and translate it to the control signal required to drive the motor of the rehabilitation device. Figure 1. A typical structure of a commercial CPM device for joint rehabilitation Figure 2. Event-related desynchronization/synchronization of motor imagery tasks Figure 3. The proposed system architecture
Transcript of Embedded systems and machine learning techniques for...

www.postersession.com
Injuries and trauma to the human joints commonly require surgical treatmentfollowed by post-operative physical therapy rehabilitation. Devices, such ascontinuous passive motion machines (CPM), are used for rehabilitation inhospitals, clinics or general practices and they are important supplements tomedical and therapeutic treatment.
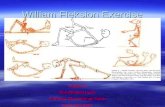
Their mode of operation is to move injured joint over a range of motion in acircular periodical way defined by the physician. For example in case of elbowand fist joints, these devices impose movement via flexion/extension and/orpronation/supination to the injured joint (Figure 1).
Embedded systems and machine learning techniques
for controlling motor physiotherapy rehabilitation devicesUsing embedded systems on processing EEG towards control of continuous passive motion devices
Gregory Kalogiannis (1); George Hassapis (1)Organization(s): 1: Aristotle University of Thessaloniki, Department of Electrical and Computer Engineering, Greece
1: [email protected], 2: [email protected]
Future Work
Introduction
Processing of EEG signals
YouTube presentation Author contact details
Processing of inspected EEG for making easier the extraction of desiredfeatures is ponderous. There are methods that are used to improve the quality ofSignal to Noise Ratio (SNR), such as Common Average Referencing (CAR).Resampling the data, filtering, bad channel detection, Independent ComponentAnalysis (ICA), epoching continuous data, and epoch rejection are the mostcommon techniques in the processing stage of EEG recordings.
During imagery motor movement tasks, the so called mu and beta event-related desynchronization (ERD) and event-related synchronization (ERS)are taking place. Recognizing these ERD/ERS patterns (Figure 2) inside therecorded EEG, that can be brief movement imagery or continuous movementimagery, allow us to recognize allow us to determine human patient imaginarymovement.
During this study we he have implemented and tested a new EEGprocessing technique, focused on event related desynchronization andsynchronization (ERS/ERD) phenomena, fast enough to run within the timelimits imposed by the on-line control of the continuous passive devices.The processing technique is based on locating feature vectors that correspondto power and energy spectrum of the identified ERD/ERS pattern in the EEGsignals. The amplitude of these vectors can be used as a feature to stop oradjust the motion angle of the CPM device.
Supervising Learning ModelsClassification of human will movement, is implemented using machine
learning techniques such as Support Vector Machines. The SVM algorithm hasbeen widely applied in the biological and other sciences. Support VectorMachines are based on the concept of decision planes that define decisionboundaries. A decision plane is one that separates sets of objects having differentclass memberships. Binary Support Vector Machine (SVM) was used as thesupervised learning model. During the offline procedure, prerecorded EEG datais used as training data to produce supporting vectors for human movementclassification. Online procedure focuses on capturing, processing and classifyingthe real time potential movement and creating out of this information the signalthat controls the motors of the rehabilitation device.
System implementationFor the implementation of the proposed system (Figure 3), the Raspberry Pi
2 single-board computer was used. This system features a Broadcom system ona chip (SoC), which includes an ARM compatible central processing unit (CPU,quad-core Cortex-A7 CPU running at 900 MHz) and an on chip graphicsprocessing unit (GPU, a VideoCore IV). Secure Digital (SD) card is used to storea UNIX based (Ubuntu Desktop 14.04 LTS) operating system, where training datais stored on an external solid state hard drive. For communicating with theMAXON type motors of the CPM device, two EPOS motor positioning controllersare connected to the system using the RS-232 protocol. These two controllersare used to transfer the control signal to the motors of the rehabilitation CPMdevice. EEG data is captured using the Emotiv EPOC Headset, a 14 channelwireless EEG, designed for Brain Computer Interface (BCI) applications. Theheadset creates dense array of high quality raw EEG data. System programmingis performed using the Robotics Operation System (ROS, Version Indigo), acollection of software frameworks for robot software development, providingoperating system-like functionality and C++ programming language.
Processing of EEG signal and Supervising Learning Models are timeconsuming procedures. In order to create signal controls within the time limitsimposed by the requirements of real-time control of rehabilitation devices,different and faster hardware implementation must be used. In future work weproposed the transformation of the current architecture, using different hardwareimplementation such as the ZYNQ SoC architecture.
Zynq®-7000 All Programmable SoC (AP SoC) devices integrate thesoftware programmability of an ARM®-based processor with the hardwareprogrammability of an FPGA, enabling key analytics and hardware accelerationwhile integrating CPU and mixed signal functionality on a single device. Thisprogrammable SoC integrates the software programmability of a processor withthe hardware programmability of an FPGA whilst providing us with systemperformance, flexibility, and scalability.
Application Links
Although their indisputable contribution to rehabilitation, it is believed that theoverall treatment time can be reduced and the overall rehabilitation could beimproved if the patient interacts with these devices and their motion is determinedaccording to patient’s will. These devices allow their easy connection withcontrollers which can make the devices to follow trajectories determined byprocessing the generated by the patient brain signals in order to extract thepatient’s intensions and will. The implementation of such an architecture requiresfast recognition of the motor imagery movements of the joint in order to create theappropriate control signals. This can be done by processing theElectroencephalography (EEG) data with the purpose of removing the noiseand information that is not essential for creating the control signal.
In this study we propose a new embedded system that focuses onprocessing EEG, fast enough to run within the time limits imposed by theon-line control of the continuous passive devices. This system use machinelearning techniques such as Support Vector Machine (SVM) in order toclassify human will to move its limb and translate it to the control signalrequired to drive the motor of the rehabilitation device.
Figure 1. A typical structure of a commercial CPM device for joint rehabilitation Figure 2. Event-related desynchronization/synchronization of motor imagery tasks
Figure 3. The proposed system architecture