Embedded system 8051 Microcontroller
307
Click here to load reader
-
Upload
ankitsharmaj -
Category
Engineering
-
view
275 -
download
5
Transcript of Embedded system 8051 Microcontroller

ANKIT SHARMARESEARCH SCHOLAR
ME-VLSI DESIGNPEC UNIVERSITY OF
TECHNOLOGY CHANDIGARH-160012
INDIA

EMBEDDED SYSTEM

OUTLINES
INTRODUCTION TO COMPUTING Microprocessor Microcontroller 8051 Real World Interfacing of 8051

INTRODUCTION TO COMPUTING

DECIMAL AND BINARY NUMBER SYSTEMS
Human beings use base 10 (decimal) arithmetic There are 10 distinct symbols, 0, 1, 2, …,9
Computers use base 2 (binary) system There are only 0 and 1 These two binary digits are commonly referred to as
bits

NUMBER SYSTEM
Decimal Binary Octal Hexa Decimal

CONVERTING FROM DECIMAL TO BINARY Divide the decimal number by 2 repeatedly Keep track of the remainders Continue this process until the quotient becomes zero Write the remainders in reverse order to obtain the binary
number

ANALOG VS DIGITAL

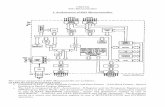
POWER SUPPLY

In general, we use an AC supply of 230V 50Hz, but this power has to be changed into required form or voltage range for providing power supply to different types of devices
Microcontrollers require a 5V DC supply, so AC 230V needs to be converted into 5V DC using the step-down converter in their power supply circuit.

4 BASIC STEPS Step Down the Voltage Level Convert AC to DC Smoothing the Ripples using Filter Regulated IC

STEP DOWN THE VOLTAGE LEVEL Step-down transformer consists of two windings, namely
primary and secondary windings. Primary can be designed using a less-gauge wire with more
number of turns as it is used for carrying low-current high-voltage power.
Secondary winding using a high-gauge wire with less number of turns as it is used for carrying high-current low-voltage power. Transformers works on the principle of Faraday’s laws of electromagnetic induction.
Actually, mutual induction between two or more winding is responsible for transformation action in an Electrical Transformer.

CONVERT AC TO DC 230V AC power is converted into 12V AC (12V RMS), but
required power is 5V DC For this purpose, 12V AC power must be primarily converted
into DC power then it can be stepped down to the 5V DC. AC power can be converted into DC using Rectifier. There are different types of rectifiers, such as half-wave
rectifier, full-wave rectifier and bridge rectifier. Due to advantages of bridge rectifier over half & full wave
rectifier, bridge rectifier is frequently used for converting AC to DC.

SMOOTHING THE RIPPLES USING FILTER
Output of diode bridge is a DC consisting of ripples also called pulsating DC.
pulsating DC can be filtered using an inductor filter or a capacitor filter or a resistor-capacitor-coupled filter for removing ripples.
Consider a capacitor filter which is frequently used in most cases for smoothing.

Capacitor is an energy storing element. Capacitor stores energy while input increases from zero to a
peak value and, while supply voltage decreases from peak Value to zero, capacitor starts discharging.
This charging and discharging of the capacitor will make the pulsating DC into pure DC.

REGULATING 12V DC INTO 5V DC USING VOLTAGE REGULATOR
15V DC voltage can be stepped down to 5V DC voltage using a DC step-down converter called as voltage reguIator IC7805.
The first two digits ‘78’ of IC7805 voltage regulator represent positive series voltage regulators and the last two digits ‘05’ represents the output voltage of the voltage regulator

MICROPROCESSORS / CONTROLLERS

WHY DO WE NEED TO LEARN
MICROPROCESSORS / CONTROLLERS The microprocessor is the core of computer systems Now a days many communication, digital entertainment,
portable devices, are controlled by them. A designer should know what types of components he
needs, ways to reduce production costs and product reliable.

DIFFERENT ASPECTS OF A MICROPROCESSOR /
CONTROLLER Hardware :Interface to the real world
Software :Order how to deal with inputs

THE NECESSARY TOOLS FOR A MICROPROCESSOR / CONTROLLER
CPU: Central Processing Unit I/O: Input /Output Bus: Address bus , Control Bus & Data bus Memory: RAM & ROM Timer Interrupt Serial Port Parallel Port

MICROPROCESSOR:
Multipurpose Re-Programmable Digital Device Semiconductor IC

MICROPROCESSOR (CONT.)
Works On:Input data from outer world
Process it under control of stored instructions /program
in memory.
Provide desired result to the outer world.

MICROCONTROLLER Introduced in 1981 by Intel Corporation. Microcontroller is a programmable digital processor
with necessary peripherals. Both microcontrollers and microprocessors are complex
sequential digital circuits meant to carry out job according to the program / instructions.

GENERAL PURPOSE MICROPROCESSORS
No RAM No ROM No I/O ports Many chips on mother’s board
A single chip

MICROCONTROLLER
CPU (microprocessor) RAM ROM I/O ports Timer ADC and other peripherals

GENERAL PURPOSE MICROPROCESSORS
Must add RAM, ROM, I/O ports, and timers externally to make them functional
Make the system bulkier and much more expensive Have the advantage of versatility on the amount of
RAM, ROM, and I/O ports

DISADVANTAGES OF MICROPROCESSOR The overall system cost is high A large sized PCB is required for assembling all the
components Overall product design requires more time Physical size of the product is big A discrete components are used, the system is not reliable

ADVANTAGES OF MICROCONTROLLER BASED SYSTEM
As the peripherals are integrated into a single chip, the overall system cost is very less
The product is of small size compared to micro processor based system
The system design now requires very little efforts As the peripherals are integrated with a microprocessor the
system is more reliable Though microcontroller may have on chip ROM,RAM and I/O
ports, additional ROM, RAM I/O ports may be interfaced externally if required
On chip ROM provide a software security

MICROCONTROLLER The fixed amount of on-chip ROM, RAM, and number of I/O
ports makes them ideal In many applications, the space it takes, the power it
consumes, and the price per unit are much more critical considerations than the computing power

8051 FAMILY HAS LARGEST NUMBER OF DIVERSIFIED (MULTIPLE SOURCE) SUPPLIERS
Intel Atmel Philips/ Signetics AMD Infineon (formerly Siemens) Matra Dallas Semiconductor/Maxim

EMBEDDED SYSTEMS
Embedded system means the processor is embedded into that application.
An embedded product uses a microprocessor or microcontroller to do one task and one task only There is only one application software that is typically burned into ROM
A PC, in contrast with the embedded system, can be used for any number of applications

It has RAM memory and an operating system that loads a variety of applications into RAM and lets the CPU run them
PC contains or is connected to various embedded products Each one peripheral has a microcontroller inside it that
performs only one task In an embedded system, there is only one application
software that is typically burned into ROM. Example : Printer, keyboard, Video game player

Home Appliances, intercom, telephones, security systems,
garage door openers, answering machines, fax machines, home computers, TVs, cable TV tuner, VCR, camcorder, remote controls, video games, cellular phones, musical instruments, sewing machines, lighting control, paging, camera, pinball machines, toys, exercise equipment
Office Telephones, computers, security systems, fax
machines, microwave, copier, laser printer, color printer, paging
Auto Trip computer, engine control, air bag, ABS,
instrumentation, security system, transmission control, entertainment, climate control, cellular
phone, keyless entry

CHOOSING A MICROCONTROLLER 8-bit microcontrollers
Motorola’s 6811 Intel’s 8051 Zilog’s Z8 Atmel Microchip’s PIC
There are also 16-bit & 32-bit Uc made by various chip makers

CRITERIA FOR CHOOSING A MICROCONTROLLER Meeting the computing needs of the task at hand efficiently and
cost effectively Speed Packaging Power consumption The amount of RAM and ROM on chip The number of I/O pins and the timer on chip How easy to upgrade to higher performance or lower power
consumption Versions, software development tools, such as compilers, assemblers,
simulator and debuggers Cost per unit

COMPARISON OF THE 8051 FAMILY MEMBERS
ROM type 8031 no ROM 80xx mask ROM 87xx EPROM 89xx Flash EEPROM
89xx 8951 8952 8953 8955
898252 891051 892051
Example (AT89C51,AT89LV51) AT= ATMEL(Manufacture) C = CMOS technology LV= Low Power(3.0v)

OVERVIEW OF 8051 FAMILY

INTEL INTRODUCED 8051, REFERRED AS MCS- 51, IN 1981
The 8051 is an 8-bit processor The CPU can work on only 8 bits of data at a time 128 bytes of RAM 4K bytes of on-chip ROM Two 16 bit timers One serial port Internal memory consists of on-chip ROM and on-chip data RAM Separate memory space for programs (code) and data

Four I/O ports, each 8 bits wide 6 interrupt sources Full duplex UART On-chip clock oscillator 64K external code & data memory space. 210 bit-addressable locations. Operating frequency is 24MHz-33MHz +5V Regulated DC power supply is required to operate .

8051 INTERNAL BLOCK DIAGRAM

MOST WIDELY USED REGISTERS
A (Accumulator) For all arithmetic and logic instructions
B, R0, R1, R2, R3, R4, R5, R6, R7 DPTR (data pointer), and PC (program
counter) SP(stack pointer)
A
B
R0
R1
R3
R4
R2
R5
R7
R6
DPH DPL
PC
DPTR
PC
Some 8051 16-bit Register
Some 8-bitt Registers of the 8051

ACCUMULATOR
Accumulator, as its name suggests, is used as a general register to accumulate the results of a large number of instructions.
For example, if you want to add the number 10 and 20, the resulting 30 will be stored in Accumulator. Once you have a value in Accumulator you may continue processing value or you may store it in another register or in memory.

THE "R" REGISTERS
The "R" registers are a set of eight registers that are named R0, R1, etc. up to and including R7.
Example:-MOV A,R3 ;Move the value of R3 into the accumulatorADD A,R4 ;Add the value of R4MOV R5,A ;Store the resulting value temporarily in R5

THE "B" REGISTER The "B" register is very similar to the Accumulator in the
sense that it may hold an 8-bit (1-byte) value. The "B" register is only used by two 8051 instructions: MUL
AB and DIV AB. Thus, if you want to quickly and easily multiply or divide A by another number, you may store other number in "B" and make use of these two instructions.
Aside from the MUL and DIV instructions, "B" register is often used as yet another temporary storage register much like a ninth "R" register.

PROGRAM COUNTER(PC) The Program Counter (PC) is a 2-byte address. Indicate, where next instruction to execute is found in
memory. This means that it can access program addresses 0000 to
FFFFH, a total of 64K bytes of code The first opcode is burned into ROM address 0000H, since
this is where the 8051 looks for the first instruction when it is booted. PC incremented each time an instruction is executed.
We achieve this by the ORG statement in the source program
PC is not always incremented by one. Some instructions need 2 or 3 bytes PC will be incremented by 2 or 3 in these cases.

DPTR The Data Pointer (DPTR) is the 8051s only user-access 16-
bit (2-byte) register. DPTR, is used to point to data. It is used by number of
commands which allow the 8051 to access external memory. When the 8051 accesses external memory it will access external memory at the address indicated by DPTR.
While DPTR is most often used to point to data in external memory, many programmers often take advantage of the fact that its the only true 16-bit register available. It is often used to store 2-byte values which have nothing to do with memory locations.

STACK IN 8051 Section of RAM used to store
information temporarily Could be data or an address CPU needs this storage area since
there are only limited number of registers
The register used to access the stack is called SP (stack pointer) register.
The stack pointer in the 8051 is only 8 bits wide, which means that it can take value 00 to FFH. When 8051 powered up, the SP register contains value 07h by default .
7FH
30H
2FH
20H1FH
17H10H0FH
07H08H
18H
00HRegister Bank 0
(Stack )Register Bank 1
Register Bank 2
Register Bank 3
Bit-Addressable RAM
Scratch pad RAM

STACK POINTER(SP)
The Stack Pointer is used to indicate where the next value to be removed from the stack should be taken from.
When you push a value onto the stack, the 8051 first increments the value of SP and then stores the value at the resulting memory location.
When you pop a value off the stack, the 8051 returns value from the memory location indicated by SP, and then decrements the value of SP.

When the 8051 is initialized SP will be initialized to 07h. If you immediately push a value onto the stack, the value
will be stored in Internal RAM address 08h. First the 8051 will increment the value of SP (from 07h to
08h) and then will store the pushed value at that memory address (08h)
SP is modified directly by the 8051 by six instructions: PUSH, POP, ACALL, LCALL, RET, and RETI.

PROGRAM STATUS WORD Program status word (PSW) register, also referred to as flag
register, is an 8 bit register Only 6 bits are used
These four are CY (carry), AC (auxiliary carry), P(parity), and OV (overflow)
They are called conditional flags, meaning that they indicate some conditions that resulted after instruction was executed
The PSW3 and PSW4 are designed as RS0 and RS1, and are used to change the bank
The two unused bits are user-definable

PROGRAM STATUS WORD
Bits of the PSW Register

INSTRUCTIONS THAT
AFFECT FLAG BITS
Instruction CY OV ACADD X X XADDC X X XSUBB X X XMUL O XDIV O XDA XRPC XPLC XSETB C 1CLR C OCPL C XANL C,bit XANL C, /bit XORL C, bit XORL C, /bit XMOV c, bit XCJNE X

EXAMPLE-ADD INSTRUCTION & PSW Flag bits affected by ADD instruction are CY, P, AC, and OV Show status of CY, AC and P flag after addition of 38H &
2FH in following instructions. MOV A, #38H ADD A, #2FH ;after the addition A=67H, CY=0
Solution: 38 (00111000) + 2F(00101111)= 67 (01100111) CY = 0 since there is no carry beyond the D7 bit AC = 1 since there is a carry from the D3 to the D4 bi P = 1 Accumulator has an odd number of 1s (it has five 1s)

8051 PINS FUNCTIONING

PIN DESCRIPTION OF 8051
8051 family members (e.g, 8751, 89C51, 89C52, DS89C4x0) Have 40 pins dedicated for various functions such as I/O,
RD, WR, address, data, and interrupts Come in different packages, such as
DIP(dual in-line package)

QFP(quad flat package)
LLC(leadless chip carrier)
Some companies provide a 20-pin version of the 8051 with reduced number of I/O ports for less demanding applications

PIN DESCRIPTION (CONT’)

PIN DIAGRAM-8051

VCC )40( & GND )20(
VCC ( pin 40 ) Vcc provides supply voltage to the chip. The voltage source is +5V.
GND ( pin 20 ): ground

OSCILLATOR CIRCUIT:- The 8051 requires an external oscillator circuit. The oscillator circuit usually runs around 12MHz. The crystal generates 12M pulses in one second. The pulse is used to synchronize the system operation in a
controlled pace. Used for synchronizing internal operations. Pins XTAL1 & XTAL2 have been used. Length of machine cycle depends on the frequency of crystal
oscillator connected to 8051.

XTAL1 AND XTAL2 (PIN 18 & PIN 19 ) 8051 has on-chip oscillator but requires external clock to run
it A quartz crystal oscillator is connected to inputs XTAL1
(pin19) and XTAL2 (pin18) Quartz crystal oscillator needs two capacitors of 30 pF
value

RST ( PIN 9 ) RESET pin is an input and is active high (normally low)
Upon applying a high pulse to this pin, the microcontroller will reset and terminate all activities
This is often referred to as a power-on reset Activating a power-on reset will cause all values in the
registers to be lost

RESET VALUE OF SOME 8051 REGISTERS:Register Reset Value
PC 0000
DPTR 0000
ACC 00
PSW 00
SP 07
B 00
P0-P3 FF
RAM are all zero.

In order for the RESET input to be effective, it must have minimum duration of 2 machine cycles In other words, the high pulse must be high for a minimum
of 2 machine cycles before it is allowed to go low

( PIN 31 ) External access, is an input pin and must be connected to
Vcc or GND “ ” means active low
The 8051 family members all come with on-chip ROM to store programs EA pin is connected to Vcc
The 8031 and 8032 family members do no have on-chip ROM, so code is stored on an external ROM and is fetched by 8031/32 EA pin must be connected to GND to indicate that the code
is stored externally

( PIN 29 ) & ALE ( PIN 30 ) Following two pins are used mainly in 8031-based systems : Program store enable, is an output pin
This pin is connected to OE pin of the ROM ALE :Address latch enable, is output pin and is active high & ALE are used for external ROM The 8031 multiplexes address and data through port 0 to save
pins ALE pin is used for de multiplexing the address and data

I/O PORT PINS The four 8-bit I/O ports P0, P1, P2 and P3 each uses 8 pins All the ports upon RESET are configured as output, ready to
be used as input ports P1, P2, and P3 have internal pull-up resisters.
P1, P2, and P3 are not open drain. P0 has no internal pull-up resistors and does not connects to
Vcc inside the 8051. P0 is open drain

PORT 0 Port 0 is also designated as AD0-AD7,
allowing it to be used for both address and data When connecting an 8051/31 to an
external memory, port 0 provides both address and data
The 8051 multiplexes address and data through port 0 pins
ALE indicates if P0 has address or data When ALE=0, it provides data D0-D7 When ALE=1, it has address A0-A7

PORT 0 (CONT’) Port 0 is 8-bitbidirectional I/O port. Port 0 pins can be used as high-impedance inputs. P0 pin must be connected externally to 10K ohm pull-up
resistor P0 is an open drain, unlike P1, P2, and P3 Open drain is used for MOS chips in same way that open
collector is used for TTL chips For output, pin latches are programmed to 0. For input, pin latches are programmed to 1

PORT 1 & PORT 2 Port 1 & Port 2 is an 8-bit bidirectional I/0 port. In 8051 with no external memory connection
Both P1 and P2 are used as simple I/O In 8031/51external memory connections
Port 2 must be used along with P0 to provide the 16-bit address for the external memory P0 provides lower 8 bits via A0 – A7 P2 is used for upper 8 bits of 16-bit address, A8 – A15, and it cannot be used for I/O
For output, pin latches are programmed to 0. For input, pin latches are programmed to 1.

PORT 3 Port 3 is an 8-bit bi-directional I/0 port. Port 3 does not need any pull-up resistors Port 3 has the additional function of providing some
extremely important signals

PORT 3 (CONT’)P3 Bit Function Pin
P3.0 RxD 10
P3.1 TxD 11
P3.2 12
P3.3 13
P3.4 T0 14
P3.5 T1 15
P3.6 16
P3.7 17
RXD (P3.0): Serial input port TXD (P3.1): Serial output port INT0 (P3.2): External interrupt INT1 (P3.3): External interrupt T0 (P3.4): Timer 0 external input T1 (P3.5): Timer 1 external input WR (P3.6): External data memory write
strobe RD (P3.7): External data memory read
strobe

INTERRUPTS

INTERRUPTS An interrupt is an external or internal event that interrupts the
microcontroller to inform it that a device needs its service A single microcontroller can serve several devices using
interrupts Whenever any device needs its service, the device notifies
microcontroller by sending it an interrupt signal Upon receiving an interrupt signal, Microcontroller interrupts
whatever it is doing and serves device Program associated with Interrupt is called interrupt service
routine (ISR) or interrupt handler

INTERRUPT SERVICE ROUTINE For every interrupt, there must be an interrupt service
routine (ISR), or interrupt handler When interrupt is invoked, microcontroller runs interrupt
service routine For every interrupt, there is a fixed location in memory that
holds the address of its ISR The group of memory locations set aside to hold the
addresses of ISRs is called Interrupt vector table

STEPS IN EXECUTING AN INTERRUPT Upon activation of interrupt, microcontroller perform these
steps It finishes the instruction it is executing and saves the address
of the next instruction (Program Counter) on the stack using PUSH operation.
It also saves current status of all interrupts internally (i.e : not on stack)
It jumps to a fixed location in memory, called interrupt vector table, that holds address of the ISR

Microcontroller gets address of ISR from interrupt vector table and jumps to it
It starts to execute the interrupt service subroutine until it reaches the last instruction of subroutine which is RETI (return from interrupt)
Upon executing RETI instruction, microcontroller returns to the place where it was interrupted First, it gets program counter (PC) address from stack by
popping the top two bytes of the stack into PC Then it starts to execute from that address

SIX INTERRUPTS IN 8051
Six interrupts are allocated as follows Reset – power-up reset Two interrupts are set aside for the timers:
One for timer 0 and one for timer 1 Two interrupts are set aside for hardware external interrupts
P3.2 and P3.3 are for external hardware interrupts INT0 , & INT1 Serial communication has a single interrupt that belongs to
both receive and transfer

INTERRUPT VECTOR TABLE
ORG 00h ;wake-up ROM reset
locationLJMP MAIN ;By-pass interrupt
vector table
ORG 30HMAIN:....END

ENABLING AND DISABLING AN INTERRUPT Upon reset, all interrupts are disabled (masked), means none
will be responded to by the microcontroller if they are activated
The interrupts must be enabled by software in order for the microcontroller to respond to them
There is a register called IE (interrupt enable) that is responsible for enabling (unmasking) and disabling (masking) the interrupts

IE (INTERRUPT ENABLE) REGISTER

ENABLING AND DISABLING AN INTERRUPT
To enable an interrupt, we take the following steps: Bit D7 of the IE register (EA) must be set to high to allow
the rest of register to take effect The value of EA
If EA = 1, interrupts are enabled and will be responded to if their corresponding bits in IE are high
If EA = 0, no interrupt will be responded to, even if the associated bit in the IE register is high

EXAMPLE Show instructions to (a) enable serial interrupt, timer 0
Interrupt, and external hardware interrupt 1 (ex1) (b) disable (Mask) timer 0 interrupt (c) show how to disable all Interrupts with a single instruction.
Solution:(A) MOV IE, #10010110B ; Timer 0, EX1 &
; enable serialAnother way
Setb IE.7 ;EA=1, global enableSetb IE.4 ;enable serial interruptSetb IE.1 ;enable timer 0 interruptSetb IE.2 ;enable EX1
(B) CLR IE.1 ;mask (disable) timer
0 interrupt only(C) CLR IE.7 ;disable all
interrupts

The timer flag (TF) is raised when timer rolls over If timer interrupt in IE register is enabled, whenever timer
rolls over, TF is raised, and microcontroller is interrupted in whatever it is doing, and jumps to the interrupt vector table to service the ISR
In this way, microcontroller can do other until it is notified that the timer has rolled over

EXTERNAL HARDWARE INTERRUPTS The 8051 has two external hardware interrupts
Pin 12 (P3.2) and pin 13 (P3.3) of the 8051, designated as INT0 and INT1, are used as external hardware interrupts
The interrupt vector table locations 0003H and 0013H are set aside for INT0 and INT1
There are two activation levels for the external hardware interrupts Level trigged Edge trigged

LEVEL TRIGGERED INTERRUPT
In level-triggered mode, INT0 and INT1 pins are normally high If a low-level signal is applied to them, it triggers the interrupt Then the microcontroller stops whatever it is doing and jumps
to the interrupt vector table to service that interrupt The low-level signal at the INT pin must be removed before
execution of the last instruction of ISR, RETI; otherwise, another interrupt will be generated
This is called a level-triggered or level activated interrupt and is default mode upon reset of the 8051

EXAMPLE
Assuming that INT1 pin is connected to a switch that is normally high. Whenever it goes low, it should turn on an LED. LED is normally off. When it is turned on it should stay on for a fraction of a second. Till the time switch is pressed low, LED should stay on.

Solution:1.Org 0000h ;Starting point2.LJMP MAIN ;by-pass interrupt vector table ISR to turn on LED
Org 0013h ;int1 ISR pin3.1=INT1 Setb P1.3 ;turn on LED Mov r3,#255 BACK: DJNZ R3,BACK ;keep LED on for a while Clr p1.3 ;turn off the LED RETI ;return from ISR MAIN program for initialization
3.Org 30h ;from 00 -> 30h to avoid interrupt rom location4.MAIN: MOV IE,#10000100B ;enable external INT 15.HERE: SJMP HERE ;stay here until get interrupted End

Pins P3.2 and P3.3 are used for normal I/O unless the INT0 and INT1 bits in the IE register are enabled
After hardware interrupts in the IE register are enabled, the controller keeps check intn pin for a low-level signal once each machine cycle
According to one manufacturer’s data sheet, pin must be held in a low state until the start of the execution of ISR . if intn pin is brought back to a logic high before start of execution of ISR there will be no interrupt
If INT pin is left at a logic low after RETI instruction of ISR, another interrupt will be activated after one instruction is executed

SERIAL COMMUNICATION INTERRUPTRI and TI Flags and Interrupts

SERIAL COMMUNICATION INTERRUPT TI (transfer interrupt) is raised when last bit of the
framed data, stop bit, is transferred, indicating that SBUF register is ready to transfer the next byte
RI (received interrupt) is raised when entire frame of data, including stop bit, is received In other words, when the SBUF register has a byte, RI is
raised to indicate that received byte needs to be picked up before it is lost (overrun) by new incoming serial data

In 8051, one interrupt set aside for serial communication This interrupt is used for both send and receive data Interrupt bit in IE register (IE.4) is enabled, when RI or TI is
raised 8051 gets interrupted and jumps to memory location
0023H To execute ISR we must examine TI and RI flags to see
which one caused the interrupt and respond accordingly

USE OF SERIAL COM IN 8051
The serial interrupt is used mainly for receiving data and is never used for sending data serially This is like getting a telephone call in which we need a
ring to be notified If we need to make a phone call there are other ways to
remind ourselves and there is no need for ringing However in receiving the phone call, we must respond
immediately no matter what we are doing or we will miss the call

INTERRUPT PRIORITY
When 8051 is powered up, priorities are assigned according to the following
Highest To Lowest PriorityExternal Interrupt 0 (INT0)Timer Interrupt 0 (TF0)External Interrupt 1 (INT1)Timer Interrupt 1 (TF1)Serial Communication (R1+T1)

INTERRUPT PRIORITY (CONT’) We can alter the sequence of interrupt priority by assigning a
higher priority to any one of the interrupts by programming a register called IP (interrupt priority)
To give a higher priority to any of interrupts, we make corresponding bit in the IP register high
When two or more interrupt bits in IP register are set to high While these interrupts have a higher priority than others, they
are serviced according to the sequence

INTERRUPT PRIORITY REGISTER (BIT-ADDRESSABLE)
Priority bit=1 assigns high priority Priority bit=0 assigns low priority

PROGRAMMING TIMERS

PROGRAMMING TIMERS
8051 has two timers/counters, they can be used either as Timers to generate a time delay or as Event counters to count events happening outside
microcontroller Both timer 0 and timer 1 are 16 bits wide since 8051 has an
8-bit architecture, each 16-bits timer is accessed as two separate registers of low byte and high byte

TIMER 0 & TIMER 1
Accessed as low byte and high byte Low byte register is called TL0/TL1 High byte register is called TH0/TH1
Accessed like any other register Mov TL0, #4FH Mov R5, TH0

TMOD REGISTER Both timers 0 and 1 use same register, called TMOD
(timer mode), to set various timer operation modes TMOD is a 8-bit register,
Lower 4 bits are for timer 0 Upper 4 bits are for timer 1
In each case, The lower 2 bits are used to set timer mode The upper 2 bits to specify operation

--- --- --- X X X X X x x x x x x x x

EXAMPLE Indicate which mode and which timer are selected for each of
the following. (a) MOV TMOD, #01H (b) MOV TMOD, #20H (c) MOV TMOD,
#12H Solution:
We convert the value from hex to binary. we have: (a) TMOD = 00000001, mode 1 of timer 0 is selected. (b) TMOD = 00100000, mode 2 of timer 1 is selected. (c) TMOD = 00010010, mode 2 of timer 0, and mode 1 of timer 1
are selected.

TMOD REGISTER-GATE Timers of 8051 do starting and stopping by either software or
hardware control In using software to start and stop timer where GATE=0
The start and stop of the timer are controlled by way of software by TR (timer start) bits TR0 and TR1
The SETB instruction starts it, and it is stopped by CLR instruction These instructions start and stop timers as long as GATE=0 in TMOD register
The hardware way of starting and stopping timer by an external source is achieved by making GATE=1 in the TMOD register

EXAMPLE Find timer’s clock frequency and its period for various 8051-
based system, with crystal frequency 11.0592 MHz when C/T bit of TMOD is 0. 1/12 × 11.0529 MHz = 921.6 MHz; T = 1/921.6 kHz = 1.085 us

EXAMPLE Find value for TMOD if we want to
program timer 0 in mode 2, use 8051 XTAL for clock source, and use instructions to start and stop timer. TMOD = 0000 0010

TIMER MODE 1

MODE 1 PROGRAMMING The following are the characteristics and operations of
mode1:1. It is a 16-bit timer;
Allows value of 0000 to FFFFH to be loaded into timer’s register TL and TH
2. After TH and TL are loaded with a 16-bit initial value, the timer must be started
This is done by SETB TR0 for timer 0 and SETB TR1 for timer 13. After the timer is started, it starts to count up
It counts up until it reaches its limit of FFFFH

When it rolls over from FFFFH to 0000, it sets high a flag bit called TF (timer flag) Each timer has its own timer flag: TF0 for timer 0, & TF1 for
timer 1 This timer flag can be monitored
When this timer flag is raised, one option would be to stop the timer with instructions CLR TR0 or CLR TR1, for timer 0 and timer 1, respectively
4. After the timer reaches its limit and rolls over, in order to repeat the process
TH and TL must be reloaded with the original value, and TF must be reloaded to 0

GENERATE A TIME DELAY Load the TMOD value register indicating which timer(timer 0 or timer 1 )is to be
used and which mode (0 or 1 ) is selected. Load registers TL and TH with initial count value Start the timer Keep monitoring the timer flag (TF) with the JNB TFx ,target instruction to see if it is
raised Get out of the loop when TF become high
Stop the timer Clear the TF flag for the next round Go back to step 2 to load TH and TL again


COUNTER

Timers can also be used as counters counting events happening outside the 8051

C/T BIT IN TMOD REGISTER The C/T bit in the TMOD registers decides the source of the
clock for the timer When C/T = 1, the timer is used as a counter and gets its
ulses from outside the 8051 The counter counts up as pulses are fed from pins 14 and 15,
these pins are called T0 (timer 0 input) and T1 (timer 1 input)

MEMORY

MEMORY CAPACITY
Number of bits that a semiconductor memory chip can store is called chip capacity Units of Kbits (kilobits), Mbits (megabits), and so on
Distinguished from storage capacity of computer systems Memory capacity of a memory IC chip is always given bits,
memory capacity of a computer system is given in bytes 16M memory chip – 16 megabits Computer comes with 16M memory – 16 megabytes

MEMORY ORGANIZATION Memory chips are organized into number of locations within
IC Each location can hold 1 bit, 4 bits, 8 bits, or even 16 bits,
depending on how it is designed internally Number of locations within a memory IC depends on
the address pins Number of bits that each location can hold is always
equal to the number of data pins A memory chip contain location, where x is the number of
address pins Each location contains y bits, where y is the number of data
pins on the chip The entire chip will contain .y bits

SPEED One of the important feature of a memory chip is the speed
at which its data can be accessed To access the data, the address is presented to the address
pins, the READ pin is activated, and after a certain amount of time has elapsed, the data shows up at the data pins
Shorter this elapsed time, the better, and consequently, the more expensive the memory chip
Speed of memory chip is referred to as its access time

SPEED (CONT’) A given memory chip has 12 address pins and 4 data pins.
Find: (a) The organization, and (b) the capacity.Solution:(a) This memory chip has 4096 locations ( = 4096), and
each location can hold 4 bits of data. This gives an organization of 4096 × 4, often
represented as 4K × 4.(b) The capacity is equal to 16K bits since there is a total of
4K locations and each location can hold 4 bits of data.

Example A 512K memory chip has 8 pins for data.
Find: (a) The organization (b) The number of address pins for this memory
chip.Solution:(a) A memory chip with 8 data pins means that each location
within the chip can hold 8 bits of data.To find number of locations within this memory chip, divide the capacity by number of data pins. 512K/8 = 64K; therefore, the organization for this memory chip is 64K × 8(b) The chip has 16 address lines since = 64K

TYPES OF MEMORY

ROM (READ-ONLY MEMORY)
ROM is a type of memory that does not lose its contents when the power is turned off
ROM is also called non volatile memory There are different types of read-only memory
PROM EPROM EEPROM Flash EPROM Mask ROM

PROM (PROGRAMMABLE ROM) PROM refers to the kind of ROM that the user can burn
information into PROM is a user-programmable memory For every bit of the PROM, there exists a fuse If the information burned into PROM is wrong, that PROM
must be discarded since its internal fuses are blown permanently
PROM is also referred to as OTP (one-time programmable) Programming ROM, also called burning ROM, requires special
equipment called a ROM burner or ROM programmer

EPROM (ERASABLE PROGRAMMABLE ROM) (CONT’) To program a UV-EPROM chip, following steps must be taken:
Its contents must be erased To erase a chip, it is removed from its socket on the
system board and placed in EPROM erasure equipment to expose it to UV radiation for 15-20 minutes
Program the chip To program a UV-EPROM chip, place it in the ROM burner To burn code or data into EPROM, ROM burner uses 12.5
volts, Vpp in the UV-EPROM data sheet or higher, depending on the EPROM type
Place the chip back into its system board socket

EPROM (ERASABLE PROGRAMMABLE ROM) (CONT’) There is an EPROM programmer (burner), and there is also
separate EPROM erasure equipment The major disadvantage of UV-EPROM, is that it cannot be
programmed while in the system board Notice the pattern of the IC numbers
Ex. 27128-25 refers to UV-EPROM that has a capacity of 128K bits and access time of 250 nanoseconds
27xx always refers to UV-EPROM chips

For ROM chip 27128, find the number of data and address pins.
Solution:The 27128 has a capacity of 128K bits. It has 16K × 8 organization (all ROMs have 8 data pins), which indicates that there are 8 pins for data, and 14 pins for address ( = 16K)

EEPROM (ELECTRICALLY ERASABLE PROGRAMMABLE ROM) EEPROM has several advantage over EPROM
Its method of erasure is electrical and therefore instant, as opposed to the 20- minute erasure time required for UVEPROM
One can select which byte to be erased, in contrast to UV-EPROM, in which the entire contents of ROM are erased
One can program and erase its contents while it is still in the system board EEPROM does not require an external erasure and
programming device The designer incorporate into the system board the
circuitry to program the EEPROM

FLASH MEMORY EPROM Flash EPROM has become a popular user-programmable
memory chip Process of erasure of the entire contents takes less than a
second, or might say in a flash The erasure method is electrical
The major difference between EEPROM and flash memory is Flash memory’s contents are erased, then the entire
device is erased There are some flash memories are recently made so that the erasure can be done block by block
One can erase a desired section or byte on EEPROM

FLASH MEMORY EPROM (CONT’) It is believed that flash memory will replace part of the hard
disk as a mass storage medium The flash memory can be programmed while it is in its
socket on the system board Widely used as a way to upgrade PC BIOS ROM
Flash memory is semiconductor memory with access time in range of 100 ns compared with disk access time in the range of tens of milliseconds
Flash memory’s program/erase cycles must become infinite, like hard disks Program/erase cycle refers to the number of times that
a chip can be erased and programmed before it becomes unusable

MASK ROM Mask ROM refers to a kind of ROM in which the contents are
programmed by the IC manufacturer, not user programmable The terminology mask is used in IC fabrication Since the process is costly, mask ROM is used when the
needed volume is high and it is absolutely certain that the contents will not change
The main advantage of mask ROM is its cost, since it is significantly cheaper than other kinds of ROM, but if an error in the data/code is found, the entire batch must be thrown away

RAM (RANDOM ACCESS MEMORY) RAM memory is called volatile memory since cutting off the
power to the IC will result in the loss of data Sometimes RAM is also referred to as RAWM (read and
write memory), in contrast to ROM, which cannot be written to
There are three types of RAM Static RAM (SRAM) NV-RAM (nonvolatile RAM) Dynamic RAM (DRAM)

SRAM (STATIC RAM) Storage cells in static RAM memory are made of flip-flops and
therefore do not require refreshing in order to keep their data The problem with the use of flip-flops for storage cells is that
each cell require at least 6 transistors to build, and the cell holds only 1 bit of data In recent years, the cells have been made of 4 transistors,
which still is too many The use of 4-transistor cells plus the use of CMOS
technology has given birth to a high capacity SRAM, but its capacity is far below DRAM

NV-RAM (NONVOLATILE RAM) NV-RAM combines the best of RAM and ROM The read and write ability of RAM, plus the nonvolatility of
ROM NV-RAM chip internally is made of the following components
It uses extremely power-efficient SRAM cells built out of CMOS
It uses an internal lithium battery as a backup energy source
It uses an intelligent control circuitry The main job of this control circuitry is to monitor the
Vcc pin constantly to detect loss of the external power supply

DRAM (DYNAMIC RAM) Dynamic RAM uses a capacitor to store each bit
It cuts down number of transistors needed to build the cell It requires constant refreshing due to leakage
The advantages and disadvantages of DRAM memory The major advantages are high density (capacity),
cheaper cost per bit, and lower power consumption per bit The disadvantages is that
It must be refreshed periodically, due to the fact that the capacitor cell loses its charge;
While it is being refreshed, the data cannot be accessed

PACKING ISSUE IN DRAM In DRAM there is a problem of packing a large number of cells
into a single chip with normal number of pins assigned to addresses Using conventional method of data access, large number
of pins defeats the purpose of high density and small packaging
For example, a 64K-bit chip (64K×1) must have 16 address lines and 1 data line, requiring 16 pins to send in the address
The method used is to split the address in half and send in each half of the address through the same pins, thereby requiring fewer address pins

PACKING ISSUE IN DRAM (CONT’) Internally, the DRAM structure is divided into a square of rows and columns
The first half of the address is called the row and the second half is called column The first half of the address is sent in through the address
pins, and by activating RAS (row address strobe), the internal latches inside DRAM grab the first half of the address
After that, the second half of the address is sent in through the same pins, and by activating CAS (column address strobe), the internal latches inside DRAM latch the second half of the address

DRAM ORGANIZATION In the discussion of ROM, we noted that all of them have 8
pins for data This is not the case for DRAM memory chips, which can
have any of the x1, x4, x8, x16 organizations

Discuss the number of pins set aside for address in each of the following memory chips. (a) 16K×4 DRAM (b) 16K×4 SRAM
Solution :Since = 16K :
(a) For DRAM we have 7 pins (A0-A6) for the address pins and 2 pins for RAS and CAS(b) For SRAM we have 14 pins for address and no pins for RAS and CAS since they are associated only with DRAM. In both cases we have 4 pins for the data bus.

MEMORY ADDRESS DECODING The CPU provides the address of the data desired, but it is
the job of the decoding circuitry to locate the selected memory block Memory chips have one or more pins called CS (chip
select), hich must be activated for the memory’s contents to be accessed
Sometimes the chip select is also referred to as chip enable (CE)

MEMORY ADDRESS DECODING (CONT’) In connecting a memory chip to CPU, note the following
points The data bus of the CPU is connected directly to the data
pins of the memory chip Control signals RD (read) and WR (memory write) from the
CPU are connected to the OE (output enable) and WE (write enable) pins of the memory chip

INTERNAL MEMORY OF 8051 8051 implements a separate memory space for programs (code),
data & and external RAM. Both code and data may be internal, however, both expand using
external components to a maximum of 64K code memory and 64K data memory.
Internal memory consists of on-chip ROM and on-chip data RAM. This is refereed to as a Harvard architecture.
The early Mark I (1944) computer developed at Harvard was of this type of architecture.
Von Neumann at Princeton pointed out that it was not necessary to put instructions and data in separate memories. Most machines have been Princeton architecture.

On-chip RAM contains a rich arrangement of general purpose storage, bit addressable storage, register banks, and special function registers.
Registers and input/output ports are memory mapped and accessible like any other memory location.
Stack resides in internal RAM, rather than in external RAM. The internal data memory is accessed using an 8-bit address.

ROM MEMORY MAP IN 8051 FAMILY

RAM MEMORY SPACE ALLOCATION IN 8051 UC

REGISTER BANKS IN 8051 MICROCONTROLLER

SPECIAL FUNCTION REGISTERS ACC B PSW SP DPTR IP PMODE PCON TMODE TCON etc.

SPECIAL FUNCTION REGISTERS 8051 has 21 special function registers (SFR) at the top of
internal RAM from address 80H to FFH. Most of the addresses from 80H to FFH are not defined,
except for 21 of them. Some SFR’s are both bit-addressable and byte-addressable,
depending on the instruction accessing the register. All 8051 CPU registers, I/O ports, timers and other
architecture components are accessible in 8051 C through SFRs

SFR REGISTERS AND THEIR ADDRESSES The SFR (Special Function Register) can be accessed by
their names or by their addresses MOV 0E0H,#55H ;is the same as MOV A,#55h ;load 55H into A MOV 0F0H,R0 ;is the same as MOV B,R0 ;copy R0 into B
The SFR registers have addresses between 80H and FFH Not all the address space of 80 to FF is used by SFR The unused locations 80H to FFH are reserved and must
not be used by the 8051 programmer

SFR REGISTERSAND THEIRADDRESSES(CONT’)
F8 FFF0 B F7E8 EFE0 Acc E7D8 DFD0 PSW D7C8 CFC0 C7B8 IP BFB0 P3 B7A8 IE AFA0 P2 A798 SCON SBUF 9F90 P1 9788 TCON TMOD TL0 TL1 TH0 TH1 8F80 P0 SP DPL DPH PCON 87

SFR REGISTERS AND THEIR ADDRESSES

Write code to send 55H to ports P1 and P2, using (a) their names (b) their addresses Solution : (a) MOV A,#55H ;A=55H MOV P1,A ;P1=55H MOV P2,A ;P2=55H (b) From Table 5-1, P1 address=80H; P2 address=A0H MOV A,#55H ;A=55H MOV 80H,A ;P1=55H MOV 0A0H,A ;P2=55H

B REGISTER
B register is used along with the accumulator for multiply and divide operations. MUL AB: multiplies 8 bit unsigned values in A and B. and
leaves the 16 bit result in A (low byte) and B (high byte). DIV AB: divided A by B, leaving the integer result in A and
remainder in B. B register is bit-addressable.

PSW (PROGRAM STATUS WORD) / FLAG REGISTER

STACK POINTER Stack pointer (SP) is an 8-bit register at
address 81H. Register used to access stack is called SP
(stack pointer) register. Stack pointer in 8051 is 8 bits wide, it can
take value 00 to FFH. When 8051 powered up, SP register contains
value 07. It contains address of data item currently on
top of the stack. Stack operations include pushing data on
stack and popping data off stack.

Pushing increments SP before writing data. Popping from stack reads data and decrements SP. 8051 stack is kept in the internal RAM. Depending on the initial value of the SP, stack can have
different sizes Example: MOV SP,#5FH
On 8051 this would limit the stack to 32 bytes since the uppermost address of on chip RAM is 7FH.

DATA POINTER (DPTR) Data pointer (DPTR): is used to access external data or
code. DPTR is a 16 bit register at addresses 82H (low byte) and
83H (high byte). The data pointer is used in operations regarding external
RAM and some instructions involving code memory. Example: the following instructions write 55H into
external RAM location 1000H: MOV A,#55H MOV DPTR,#1000H MOVX @DPTR,A

LCD INTERFACING
WITH
MICROCONTROLLER
16X2 LCD

ADDRESSING MODE OF 8051

The CPU can access data in various ways, which are called addressing modes Immediate Addressing Mode Register Addressing Mode Direct Addressing Mode Register indirect Addressing Mode Indexed Addressing Mode
Addressing modes
ImmediateAddressing
RegisterAddressing
DirectAddressing
Register indirectAddressing
IndexedAddressing

1- IMMEDIATE ADDRESSING MODE The source operand is a constant
The immediate data must be preceded by pound sign, “#”
Can load information into any registers, including 16-bit DPTR register DPTR can also be accessed as two 8-bit registers, the
high byte DPH and low byte DPL Operand comes immediately after op-code

EXAMPLES OF IMMEDIATE ADDRESSING MODE
MOV A,#25H // load 25H into A MOV R4,#62 // load 62 into R4 MOV B,#40H // load 40H into B MOV DPTR,#4521H // DPTR=4512H MOV DPL,#21H // This is the same MOV DPH,#45H // as above MOV DPTR,#68975 //illegal!! Value > 65535 (FFFFH)

We can use EQU directive to access immediate data
We can also use immediate addressing mode to send data to 8051 ports
Count EQU 30... ...MOV R4,#COUNT // R4=1EH
MOV P1,#55H // Sending
data to port

2- REGISTER ADDRESSING MODE Register addressing mode involves the use of registers to
hold the data to be manipulated MOV A, R0 // copy the contents of R0 in to A. MOV R1, A // copy the contents of A in to R1. ADD A,R5 // add the content of R5 to content
of A. The movement of data between Rn registers is not allowed
MOV R4,R7 // Invalid Command The source and destination registers must match in size
MOV DPTR,A // Error

3- DIRECT ADDRESSING MODE In direct addressing mode, the data is in a RAM memory
location whose address is known, and this address is given as a part of the instruction.
Contrast this with the immediate addressing mode in which the operand itself is provided with the instruction. MOV R0,40H ;save content of 40H memory location in
R0 MOV 56H,A ;save content of A in 56H MOV PSW,R5 ; M(PSW) R5

It is most often used direct addressing mode to access RAM locations 30 – 7FH The entire 128 bytes of RAM can be accessed The register bank locations are accessed by the register
names MOV A,R4 ;which means copy R4 into A

PUSH/POP WITH DIRECT ADDRESSING MODE Only direct addressing mode is allowed for pushing or popping the stack
PUSH A // Invalid Pushing the accumulator onto the stack must be coded as PUSH 0E0H ExampleShow the code to push R5 and A onto the stack and then pop them back them into R2 and B, where B = A and R2 = R5Solution:
PUSH 05 ;push R5 onto stackPUSH 0E0H ;push register A onto stackPOP 0F0H ;pop top of stack into B // now register B = register
APOP 02 // pop top of
stack into R2 now R2=R6

4- REGISTER INDIRECT ADDRESSING MODE In register indirect addressing mode, a register is used as a
pointer to the data. If data is inside the CPU, only register R0 and R1 are used
for this purpose. R2-R7 cannot be used to hold the address of an operand located in RAM when using this addressing mode.
When R0 and R1 are used as pointers , that is, when they hold the address of RAM locations , they must be preceded by the “@” sign. MOV A,@R0 // move contents of RAM location whose address is held by R0
into A. MOV @R1,A // move contents of B into RAM whose address is held by R1

ExampleWrite a program to clear 16 RAM locations starting at RAM address 60HSolution:
CLR A ;A=0MOV R1,#60H ;load pointer. R1=60HMOV R7,#16 ;load counter, R7=16AGAIN: MOV @R1,A ;clear RAM R1 points toINC R1 ;increment R1 pointerDJNZ R7,AGAIN ;loop until counter=zero

5- INDEXED ADDRESSING MODE
Indexed addressing mode is used in accessing data elements of look-up table entries located in program ROM space
Instruction used for this purpose is “@A+DPTR, @A+PC”. The 16-bit register DPTR and register “A” are used to form
the data element stored in on-chip ROM. In this instruction content of A are added to the 16-bit
register DPTR to form the 16-bit address of the needed data.

EXAMPLES
MOVC A,@A+DPTR ; A ROM(A+DPTR) MOVC A,@A+PC ; A ROM(A+PC) JMP @A+DPTR ; PC (A+DPTR)

Example Write a program to copy the value 55H into RAM memory locations 40H to 41H using (a) direct addressing mode(b) register indirect addressing mode without a loop(c) with a loop

Solution:(a) MOV A,#55H //load A with value 55H
MOV 40H,A //copy A to RAM location 40H
MOV 41H.A //copy A to RAM location 41H(b) MOV A,#55H //load A with value 55H
MOV R0,#40H //load the pointer. R0=40HMOV @R0,A //copy A to RAM R0 points
toINC R0 //increment pointer. Now
R0=41hMOV @R0,A //copy A to RAM R0 points to

(c) MOV A,#55H //A=55HMOV R0,#40H //load pointer.R0=40H,
MOV R2,#02 //load counter, R2=3AGAIN: MOV @R0,A //copy 55 to RAM R0 points toINC R0 //increment R0 pointer
DJNZ R2,AGAIN //loop until counter = zero

INSTRUCTION SET OF 8051

ASSEMBLING AND RUNNING AN 8051 PROGRAM
An Assembly language instruction consists of four fields:[label : ] mnemonic [operands] [;comment]

INSTRUCTIONS THAT AFFECT FLAG SETTINGS
Instructions That Affect Flag Bits

INSTRUCTION SET OF 8051
Arithmetic Operation Group Logical Operation Group Data Transfer Group Boolean Variable Manipulation Group Program Branching Group

ARITHMETIC INSTRUCTIONS These instructions are used to perform various
mathematical operations like addition, subtraction, multiplication, and division etc.

ADDITION WITHOUT CARRY ADD A, Source //ADD the source operand to the
accumulator ADD A, R1 // Add the content of register1 to Accumulator ADD A, Direct // ACCACC+ Data of memory location ADD A, #Data Add A, @Ri

ADDITION WITH CARRY► ADDC A,Direct // Add data of memory to accumulator with carry► ADDC A,Rn► ADDC A,@Ri► ADDC A,#2

EXAMPLES MOV A,#25H ;load 25H into A MOV R2,#34H ;load 34H into R2 ADD A,R2 ;add R2 to accumulator
;Executing the program above results in A = 59H

SUBSTRACTION WITH BORROW► SUBB A,Direct► SUBB A,Rn► SUBB A,@Ri► SUBB A,#Data

INCREMENT OPERATION► INC A // Increment accumulator► INC Direct // Increment data at memory
location► INC Rn // Increment data of memory
location► INC @Ri // Increment data at address store
by Ri

DECREMENT OPERATION► DEC A // Decrement accumulator► DEC Direct // Decrement data at memory location► DEC Rn // Decrement data of memory
location► DEC @Ri // Decrement data at address store by
Ri

ARITHMETIC OPERATION GROUP EXAMPLES INC DPTR //Increment DPTR DA A //Decimal adjust
Accumulator(BCD) MUL AB // Multiply A and B DIV AB // Divide A by B

INSTRUCTION SET Arithmetic Operation Group Logical Operation Group Data Transfer Group Boolean Variable Manipulation Group Program Branching Group

LOGICAL OPERATION GROUP The logical instructions are instructions which are used for
performing some operations like AND, OR, NOT, X-OR and etc.

LOGICAL OPERATION-AND► ANL A,Direct► ANL A,Rn► ANL A,@Ri► ANL A,#Data► ANL Direct,A► ANL Direct,#Data

LOGICAL OPERATION-OR ORL A, Direct ORL A, Rn ORL A, @Ri ORL A, #Data ORL Direct, A ORL Direct, #Data

LOGICAL OPERATION-XOR XRL A, Direct XRL A, Rn XRL A, @Ri XRL A, #Data XRL Direct, A XRL Direct, #Data

LOGICAL OPERATION – ROTATE, SWAP RR A // Rotate Accumulator right
If ACC=C3H (11000011), then the instruction results in ACC=E1H (11100001) with the carry unaffected
RRC A //Rotate Accumulator right through carry If ACC=C3H (11000011), and the carry flag is 0, the instruction
results in ACC=61H (01100001) with the carry flag set SWAP A //Swap nibbles with in the Accumulator RL A //Rotate Accumulator left
RLC A //Rotate Accumulator left through carry

LOGICAL OPERATION -CLEAR & CLEAR CLR A //Clear Accumulator CPL A // Complement Accumulator

INSTRUCTION SET Arithmetic Operation Group Logical Operation Group Data Transfer Group Boolean Variable Manipulation Group Program Branching Group

DATA TRANSFER GROUP These instruction are used to transfer the data from source
operand to destination operand. All the store, move, load, exchange input and output
instructions belong to this group.

DATA TRANSFER-MOV
MOV destination, source ;copy source to destination MOV A, Direct MOV A, Rn MOV A, @Ri MOV A, #Data MOV Rn, Direct MOV Rn, @Ri MOV Rn, #Data

DATA TRANSFER-MOV► MOV Direct, Direct► MOV Direct, Rn► MOV Direct, @Ri► MOV Direct, #Data► MOV Direct, A► MOV @Ri, A► MOV @Ri, #Data

DATA TRANSFER-MOV MOV @Ri, Direct MOV DPTR, #DATA16 MOVC A, @A+DPTR MOVC A, @A+PC MOVX A, @Ri MOVX @Ri, A MOVX @DPTR, A

EXAMPLES MOV A,#55H // load value 55H into reg A MOV R0,A //copy contents of A into R0 (A=R0=55H) MOV R1,A //copy contents of A into R1 (A=R0=R1=55H) MOV R2,A //copy contents of A into R2
(A=R0=R1=R2=55H) MOV R3,#95H //load value 95H into R3 (R3=95H) MOV A,R3 //copy contents of R3 into A
(A=R3=95H) MOVX A,@DPTR // Move external RAM to Accumulator

DATA TRANSFER-PUSH,POP PUSH Direct // PUSH direct byte on to stack POP Direct // POP direct byte from stack XCH A,Rn //Exchange ACCUMULATOR with
Register XCH A,Direct // Exchange ACCUMULATOR with data at location XCH A,@Ri XCHD A,@Ri //Exchanges low-order nibble of Accumulator
(bits 3 through 0), with that of internal RAM location indirectly addressed by specified register.High-order nibbles (bits 7-4) of each register are not affected

INSTRUCTION SET Arithmetic Operation Group Logical Operation Group Data Transfer Group Boolean Variable Manipulation Group Program Branching Group

BOOLEAN VARIABLE-SET,CLEAR,COMPLEMENT► CLR C //Clear the carry bit► CLR bit // Clear the bit of any register ► SETBC // Set the carry bit=1► SETB bit //Set the bit of any register► CPL C //Complement the carry► CPL bit //Complement the bit of any register

BIT ADDRESSABLE EXAMPLE
SETB 07Fh ; Bit 7F 1
SETB 2F.7 ; same

BOOLEAN VARIABLE-AND,OR,MOV► ANL C,bit► ANL C,/bit ► ORL C,bit► ORL C,/bit► MOV C,bit► MOV bit,C

INSTRUCTION SET► Arithmetic Operation Group► Logical Operation Group ► Data Transfer Group► Boolean Variable Manipulation Group► Program Branching Group

These instructions are used for jump, call instruction as well as branch instruction. Program flow change in branch instruction if condition met Program flow always change in jump and call instruction

CONDITIONAL JUMP INSTRUCTIONS JC // Jump if carry equal to one JNC // Jump if carry equal to zero JB // Jump if bit equal to one JNB // Jump if bit equal to zero JBC // Jump if bit equal to one and clear bit JZ // Jump if A=Zero JNZ // Jump if A not equal to zero DJNZ// Decrement and Jump if not equal to zero. CJNE A, P1,rel //compare and jump if not equal

CJNE A,Direct,rel //Compare and Jump if Not Equal CJNE A,#Data,rel CJNE Rn,#Data,rel CJNE @Ri,#Data,rel DJNZ Rn,rel //Decrement and jump if not zero DJNZ Direct,relEXAMPLE The Accumulator contains 34H. Register 7 contains 56H. The
first instruction in the sequence,CJNE R7, # 60H, NOT_EQ ; . . . . . . . . ;R7 = 60H.NOT_EQ: JC REQ_LOW ;IF R7 < 60H.. . . . . . . . …………………;R7 > 60H.

► Unconditional Jump Instructions The unconditional jump is a jump in which
control is transferred unconditionally to the target location
► In 8051 there two unconditional jumps. They are:► SJMP addr16 // Short jump► LJMP rel // Long jump

LJMP ADDR16
LJMP causes an unconditional branch to the indicated address, by loading the high-order and low-order bytes of the PC (respectively) with the second and third instruction bytes. The destination may therefore be anywhere in the full 64K program memory address space. No flags are affected.
LJMP (PC) ← addr15-0

LCALL ADDR16 LCALL calls a subroutine located at indicated address. Instruction adds three to program counter to generate address
of next instruction and then pushes the 16-bit result onto stack (low byte first), incrementing the Stack Pointer by two.
High-order and low-order bytes of the PC are then loaded, respectively, with second and third bytes of LCALL instruction.
Program execution continues with instruction at this address. The subroutine may therefore begin anywhere in the full 64K byte program memory address space. No flags are affected.

LCALL OPERATIONLCALL(PC) ← (PC) + 3(SP) ← (SP) + 1((SP)) ← (PC7-0)(SP) ← (SP) + 1((SP)) ← (PC15-8)(PC) ← addr15-0

PROGRAM BRANCHING GROUP► NOP
► Execution continues at the following instruction. Operation
(PC) ← (PC) + 1

ACALL ADDR11 ACALL unconditionally calls a subroutine located at the
indicated address. The instruction increments the PC twice to obtain the
address of the following instruction, then pushes the 16-bit result onto the stack (low-order byte first) and increments the Stack Pointer twice.
The destination address is obtained by successively concatenating the five high-order bits of the incremented PC, opcode bits 7 through 5, and the second byte of the instruction.
The subroutine called must therefore start within the same 2 K block of the program memory as the first byte of the instruction following ACALL. No flags are affected.

2-byte instructions where the 11-bit absolute address is specified as the operand
Upper 5 bits of 16-bit PC address are not modified. The lower 11 bits are loaded from this instruction. So, the branch address must be within the current 2K byte page of program memory (211 = 2048)
Example:ACALL PORT_INIT ;PORT_INIT should be located within 2k bytes.
PORT_INIT: MOV P0, #0FH ;PORT_INIT subroutine

The label JMPADR is at program memory location 0123H. The following instruction,AJMP JMPADR
is at location 0345H and loads the PC with 0123H.a10 a9 a8 0 0 0 0 1 a7 a6 a5 a4 a3 a2 a1 a0Operation: AJMP(PC) ← (PC) + 2(PC10-0) ← page address

ASSEMBLER DIRECTIVE-DB DB directive is most widely used data directive in the assembler It is used to define the 8-bit data DB is used to define data in decimal, binary, hex,ASCII formats
ORG 500H DATA1: DB 28 ;DECIMAL (1C in Hex) DATA2: DB 00110101B ;BINARY (35 in Hex) DATA3: DB 39H ;HEX ORG 510H DATA4: DB “2591” ;ASCII NUMBERS ORG 518H DATA6: DB “My name is Joe” ;ASCII CHARACTERS

ORG (ORIGIN) The ORG directive is used to indicate beginning of the
address Number that comes after ORG can be either in hex and
decimal If the number is not followed by H, it is decimal & assembler
will convert it to hex

END This indicates to the assembler the end of source (asm) file The END directive is last line of an 8051 program It’s mean that in the code anything after the END directive
is ignored by the assembler

EQU (EQUATE) Used to define a constant without occupying memory
location EQU directive does not set aside storage for a data item
but associates a constant value with a data label When label appears in program, its constant value will be
substituted for label Assume that there is a constant used in many different
places in program, & programmer wants to change its value throughout

By the use of EQU, one can change it once and the assembler will change all of its occurrences COUNT EQU 25 ... .... MOV R3, #COUNT

STRUCTURE OF ASSEMBLY LANGUAGE ORG 0H // start (origin) at 0 MOV R5,#25H // load 25H into R5 MOV R7,#34H // load 34H into R7 MOV A,#0 // load 0 into A ADD A,R5 // add contents of R5 to A now A = A
+ R5 ADD A,R7 // add contents of R7 to A now A = A
+ R7 ADD A, #12H // add to A value 12H now A = A +
12H HERE: SJMP HERE // stay in this loop END // end of asm source file

EMBEDDED C

Whenever the conventional ‘C’ language and its extensions are used for programming embedded system, it is referred to as Embedded C programming

WHY PROGRAM 8051 IN C Compilers produce hex files that is downloaded to ROM of
microcontroller The size of hex file is the main concern
Microcontrollers have limited on-chip ROM Code space for 8051 is limited to 64K bytes
C programming is less time consuming, but has larger hex file size The reasons for writing programs in C
It is easier and less time consuming to write in C than Assembly C is easier to modify and update You can use code available in function libraries

DATA TYPES A good understanding of C data types for 8051 can help
programmers to create smaller hex files Unsigned char Signed char
Unsigned int Signed int
Sbit (single bit) Bit and sfr

UNSIGNED CHAR The character data type is the most natural choice
8051 is an 8-bit microcontroller Unsigned char is 8-bit data type in range of 0 – 255 (00 –
FFH) One of most widely used data types for the 8051
Counter value ASCII characters
C compilers use the signed char as the default if we do not put the keyword unsigned

UNSIGNED CHAR (CONT’) Write an 8051 C program to send values 00 – FF
to port P1.
#include <reg51.h> void main(void) { unsigned char z; for (z=0;z<=255;z++) P1=z; }

DATA TYPES- UNSIGNED CHAR (CONT’) Write an 8051 C program to send hex values for ASCII
characters of 0, 1, 2, 3, 4, 5, A, B, C, and D to port P1. #include <reg51.h> void main(void) { unsigned char mynum[]=“012345ABCD”; unsigned char z; for (z=0;z<=10;z++) P1=mynum[z]; }

UNSIGNED CHAR (CONT’) Write an 8051 C program to toggle all the bits of P1
continuously.#include <reg51.h>void main(void){for (;;){p1=0x55;p1=0xAA;}
}

SIGNED CHAR The signed char is an 8-bit data type
Use the MSB D7 to represent – or + Give us values from –128 to +127
We should stick with the unsigned char unless the data needs to be represented as signed numbers

SIGNED CHAR (CONT’) Write an 8051 C program to send values of –4 to +4 to port
P1.#include <reg51.h>void main(void){char mynum[]={+1,-1,+2,-2,+3,-3,+4,-4};unsigned char z;for (z=0;z<=8;z++)P1=mynum[z];}

UNSIGNED AND SIGNED INT Unsigned int is a 16-bit data type
Takes a value in the range of 0 to 65535 (0000 – FFFFH) Define 16-bit variables such as memory addresses Set counter values of more than 256 Since registers and memory accesses are in 8-bit
chunks, the misuse of int variables will result in a larger hex file
Signed int is a 16-bit data type Use the MSB D15 to represent – or + We have 15 bits for the magnitude of the number from –
32768 to +32767

SINGLE BIT Write an 8051 C program to toggle bit D0 of the port P1 (P1.0) 50,000 times. #include <reg51.h> sbit MYBIT=P1^0; void main(void) { unsigned int z; for (z=0;z<=50000;z++) { MYBIT=0; MYBIT=1; } }

BIT AND SFR The bit data type allows access to single bits of bit-
addressable memory spaces 20 – 2FH To access the byte-size SFR registers, we use the sfr data
type 7FH
30H
2FH
20H1FH
17H10H0FH
07H08H
18H
00HRegister Bank 0
(Stack )Register Bank 1
Register Bank 2
Register Bank 3
Bit-Addressable RAM
Scratch pad RAM

DELAY IN 8051

TIME DELAY There are two way s to create a time delay in 8051 C
Using the 8051 timer Using a simple for loop
Be mindful of three factors that can affect the accuracy of the delay The 8051 design The number of machine cycle The number of clock periods per machine cycle
The crystal frequency connected to the X1 – X2 input pins Compiler choice
C compiler converts the C statements and functions to Assembly language instructions
Different compilers produce different code

Write an 8051 C program to toggle bits of P1 continuously forever with some delay.
//Toggle P1 forever with some delay in between “on” and “off” #include <reg51.h> void main(void) { unsigned int x; for (;;) //repeat forever { P1=0x55; for (x=0;x<40000;x++); //delay size //unknown P1=0xAA; for (x=0;x<40000;x++); }}

#include <reg51.h>void MSDelay(unsigned int);void main(void){
while (1) //repeat forever{ p1=0x55;MSDelay(250);p1=0xAA;MSDelay(250); }
}
void MSDelay(unsigned int itime)
{unsigned int i,j;for (i=0;i<itime;i++)for (j=0;j<1275;j++);
}
Write 8051 program to toggle bits of P1 ports continuously with 250 ms.

LEDs are connected to bits P1 and P2. Write an 8051 C program that shows the count from 0 to FFH (0000 0000 to 1111 1111 in binary) on the LEDs.
#include <reg51.h>#define LED P2void main(void){P1=00; //clear P1LED=0; //clear P2for (;;) //repeat forever{P1++; //increment P1LED++; //increment P2}}

Write an 8051 C program to monitor bit P1.5. If it is high, send 55H to P0; otherwise, send AAH to P2.
#include <reg51.h> sbit mybit=P1^5; void main(void) { mybit=1; //make mybit an input while (1) { if (mybit==1) P0=0x55; else P2=0xAA; }}

Write an 8051 C program to read the P1.0 and P1.1 bits and issue an ASCII character to P0 according to the following table.
P1.1 P1.00 0 send ‘0’ to P00 1 send ‘1’ to P01 0 send ‘2’ to P01 1 send ‘3’ to P0

#include <reg51.h> void main(void) { unsigned char z; z=P1; z=z&0x3; switch (z) { case(0): { P0=‘0’; break; }
case(1):{P0=‘1’;break;}case(2):{P0=‘2’;break;}case(3):{P0=‘3’;break;}}}

PROTEUS

After perfecting your project on programming side in KEIL, you'll need to simulate it on PROTEUS to determine output of hardware components and change it if need be.
This will completely ensure your project's success.

Place your components from library Connect them accordingly Load HEX file (if 8051 is involved) Simulate the circuit

PLACING COMPONENTS
Click "Pick from library (P)" button as shown in figure
Select any category Select item from the list Click OK

After selecting component, click anywhere in design area to select it and then click again to place it

CONNECTING COMPONENTS Place all the required components Connect desired nodes by clicking at starting &ending
points

LOAD HEX FILE Double click the 8051 component to open its properties Browse for the HEX file as shown and select it

SIMULATING THE CIRCUIT
Controls at left-bottom corner will help you simulate circuit in real time

BLINKING OF LED

#include<reg51.h> sbit LED = P1^0; // Pin P1.0 is named as
LED void x(void); //Function declarations void delay(int a); //Function declarations int main(void) { x(); // Make all ports as output port while(1) { LED = 0; // Pin P1.0 Low delay(30000); // Half sec delay LED = 1; // Pin P1.0 High delay(30000); // Half sec delay }}
void delay(int a){ int i; for(i=0;i<a;i++); //null statement}
void x(void){P0 = 0x00; P1 = 0x00; P2 = 0x00; P3 = 0x00; }


INTERFACING LCD TO 8051
LCD is finding widespread use replacing LEDs The declining prices of LCD The ability to display numbers, characters, and graphics Ease of programming for characters and graphics

Pin Symbol I/O Description1 VSS -- Ground2 VCC -- +5V power supply3 VEE -- Power supply to control contrast4 RS(Register
select)I RS=0 to select command register,
RS=1 to select data register5 R/W I R/W=0 for write,
R/W=1 for read6 E I Enable7 DB0 I/O The 8-bit data bus8 DB1 I/O The 8-bit data bus9 DB2 I/O The 8-bit data bus10 DB3 I/O The 8-bit data bus11 DB4 I/O The 8-bit data bus12 DB5 I/O The 8-bit data bus13 DB6 I/O The 8-bit data bus14 DB7 I/O The 8-bit data bus15 BL+ -- Brightness16 BL- -- Ground

RESISTER SELECT(RS) PIN
Control Register Used for instructing LCD on what
to do next. It's like talking to your LCD using this register.
Data Register Used for displaying data on
LCD.

No. Instruction Hex Decimal1 Function Set: 8-bit, 1 Line, 5x7 Dots 0x30 482 Function Set: 8-bit, 2 Line, 5x7 Dots 0x38 565 Entry Mode 0x06 6
6 Display off Cursor off(clearing display without clearing DDRAM content) 0x08 8
7 Display on Cursor on 0x0E 148 Display on Cursor off 0x0C 129 Display on Cursor blinking 0x0F 1510 Shift entire display left 0x18 2411 Shift entire display right 0x1C 3012 Move cursor left by one character 0x10 1613 Move cursor right by one character 0x14 2014 Clear Display (also clear DDRAM content) 0x01 1

R/W (READ/WRITE) CONTROL PIN Determine the flow of data.
Write Mode when you're sending something to LCD (data or command)
Read Mode when you're reading from the LCD

It is basically called 16x2 LCD Sixteen columns & two rows thus it can display thirty-
two (32) characters at a time (sixteen characters in each row)
Connect potentiometers to Vee or BL controls to control the contrast or Brightness yourself.

LCD PROGRAM CODE IN A STEPWISE FASHION

1- Unique name to each pin on LCD using #define directive so that you can mention them easily

To differentiate between command and data as discussed above, create two separate functions. As you can see, the only difference is that of using RS pin according to requirement.

The delay function is general one and you can use it safely.

main function

To send a command to LCD, use the lcdcmd function with command as input.
To send data to LCD, use the lcddata function with the data as input.
LCD accepts only ASCII characters which means that every character you send for display must be in ASCII

x = 'A'lcddata ( x )
x = 65 //decimal valuelcddata ( x )
x = 0x41 //hexadecimal valuelcddata ( x )
lcddata ( 'A' ) where x can be of type char or int whether signed or unsigned.

KEIL-LCD INTERFACING#include <REGX51.H> //header file
#define lcdport P2 //port 2 of microcontroller#define rs P3_0 //port 3 pin 0 of microcontroller#define rw P3_1 //port 3 pin 1 of microcontroller#define e P3_2 //port 3 pin 2 of microcontroller
void lcdcmd (unsigned char); //function define for lcd command modevoid lcddata(unsigned char); //function define for lcd data modevoid delay (unsigned int); //function define for delay mode

void main(){
//INITIALIZE LCDlcdcmd(0x38); //for using 8-bit double row mode of LCDlcdcmd(0x0E); //turn display ON for cursor blinkinglcdcmd(0x01); //clear screen//PRINT A CHARACTERlcddata(‘E');lcddata(‘F');lcddata('A');while(1);
}//*********Function to send command to LCD*******//void lcdcmd(unsigned char value) {
lcdport = value;rw = 0; // write moders = 0; //register select command registere=1; //enable chipdelay(1); //delaye=0; // disable chip
}

//**********Function to send data to LCD**********//void lcddata(unsigned char value) {
lcdport = value;rw = 0; // write moders = 1; //register select data mode
e=1; //enable lcddelay(1);e=0; //disable lcd
}
void delay(unsigned int msec) // Function to provide time delay in msec.{
int i,j ;for(i=0;i<msec;i++)for(j=0;j<1275;j++);
}

PROTEUS- LCD INTERFACING SCHEMATIC

STEPPER MOTOR INTERFACING

A Stepper Motor is a brushless, synchronous DC Motor. Performs many applications in field of robotics. The total rotation of motor is divided into steps. Angle of a single step is known as stepper angle of motor. There are two types of stepper motors Unipolar and
Bipolar. Due to the ease of operation unipolar stepper motor is
commonly used by electronics hobbyists. Stepper Motors can be easily interfaced with a
microcontroller using driver ICs such as L293D or ULN2003.

WORKING OF STEPPER MOTOR Stepper motors works on the principle of electromagnetic induction. Ordinary DC Brush motors rotate continuously when DC voltage is
applied to their terminals. While stepper motor need a sequence of digital pulses for one complete
rotation. Stepper motor contains a magnetic or soft iron rotor surrounded by
electromagnetic stators. Stator and rotor have poles which may be teethed depending on type of
stepper motor. Firstly one stator electromagnet is energised, this makes rotor teeth
magnetically attracted to electromagnet’s teeth. When rotor teeth gets align with first electromagnet, it gets misaligns
with next electromagnet. So when next electromagnet is turned on and first one is turned off, rotor rotates to align with next one. This process is repeated to get required rotation.

TYPES OF STEPPER MOTOR
Stepper Motors are classified in to three types depending upon its construction.
Permanent Magnet Stepper Variable Reluctance Stepper Hybrid Stepper

PERMANENT MAGNET STEPPER It has a permanent magnet in rotor and operates on repulsion
and attraction between permanent magnet rotor and stator electromagnets.
Stator and rotor poles of these types are not teethed. First a stator is energized, it develops electromagnetic north and south poles. It rotates rotor to align with magnetic field of stator.
Then other stators are energised in sequentially this rotates rotor to align with new magnetic field.
Through this way we can rotate rotor through fixed steps.

VARIABLE RELUCTANCE STEPPER These types of motors operates on principle that minimum
reluctance occurs with minimum gap and it has a non-magnetic toothed soft iron rotor.
When a stator is energised, rotor rotates to have a minimum gap between the stator and its teeth.
The rotor teeth is designed such that when it aligns with one stator, they will get misaligned with then next stator.
Thus by energising stators sequentially we can rotate the rotor.

HYBRID STEPPER These types of motors are a combination of Permanent
Magnet and Variable Reluctance techniques to achieve maximum power in a small package size.
It has a teethed magnetic rotor which can better guides magnetic flux to preferred location in the air gap.
Usually electromagnets of stepper motor is energised using special controlling circuits, such as microcontrollers.

Stepper Motors are classified into two, based on its winding arrangement. Unipolar Motors Bipolar Motors

UNIPOLAR MOTORS A unipolar motor contains centre tapped windings. Usually centre connection of coils are tied together and used as
power connection. By using this arrangement a magnetic poles can be reversed
without reversing direction of current. Thus the commutation circuit can be made very simple. This ease of operation makes Unipolar Motor popular among
electronics hobbyists.

BIPOLAR MOTORS Bipolar motors have no center tap connections. Current through winding should be reversed to reverse
magnetic poles. So driving circuit is complicated. We can solve this by using a H-bridge connection or by using
ready made chips such as L293D. We can distinguish bipolar motors from unipolar motors by
measuring coil resistance. In bipolar motors we can find two wires with equal
resistance.

DRIVING OF STEPPER MOTOR – STEPPING MODES
Stepping Modes refers to sequence in which stator electromagnets are energised to rotate stepper motor.
There are three types of stepping modes.

WAVE DRIVE – ONE ON AT A TIME Only one stator electromagnet is energised at a time. It has same number of steps as full step drive but torque is
significantly less. It is rarely used.

FULL DRIVE – TWO ON AT A TIME Two stator electromagnets are energised at a time. It is the usual method used for driving and the motor will
run at its full torque in this mode of driving.

HALF DRIVE – ONE OR TWO ON AT A TIME
Alternatively one and two phases are energised. This mode is commonly used to increase angular
resolution of motor but the torque is less approximately 70% at its half step position (when only a single phase is on)

DRIVING UNIPOLAR STEPPER MOTOR WITH 8051
Unipolar stepper motors can be used in three modes namely Wave Drive, Full Drive and Half Drive mode.
Each drive have its own advantages and disadvantages, thus we should choose required drive according to application and power consumption.

WAVE DRIVE One electromagnet is energized at a time. Generated torque
will be less when compared to full drive in which two electromagnets are energized at a time but power consumption is reduced.
It has same number of steps as in the full drive. This drive is preferred when power consumption is more important than torque.
It is rarely used.

FULL DRIVE Two electromagnets are energized at a time, so the torque
generated will be larger when compared to Wave Drive. This drive is commonly used than others. Power
consumption will be higher than other modes.

HALF DRIVE Alternatively one and two electromagnets are energized, so
it is a combination of Wave and Full drives. This mode is commonly used to increase angular
resolution of motor but the torque will be less, about 70% at its half step position. We can see that the angular resolution doubles when using Half Drive.

INTERFACING USING L293D Driving a bipolar stepper motor using 8051 microcontroller using L293D.
24MHz crystal is connected to provide required clock for microcontroller.
10μF capacitor and 10KΩ is used to provide Power On Reset (POR) for 8051 microcontroller.
L293D is connected to pins P2.0, P2.1, P2.2, P2.3 of the microcontroller and two pairs of L293D are enabled by tieing EN1, EN2 to 5V.
Logic Voltage (5V) is connected to Vss pin and Motor Supply (12V) is connected to the Vs pin of L293D.
Center Tap of each windings of stepper motor is shorted and connected to the motor supply.
Now we can energize each winding of the motor by making corresponding pin of L293D LOW.

INTERFACING BIPOLAR STEPPER MOTOR WITH 8051 USING L293D

INTERFACING UNIPOLAR STEPPER MOTOR WITH 8051USING L293D

INTERFACING UNIPOLAR STEPPER MOTOR WITH 8051 USING ULN2003

KEIL - C CODE FOR WAVE DRIVE#include<reg51.h>void delay(int);void main(){
do { P2=0x01; //0001 delay(1000); P2=0x02; //0010 delay(1000); P2=0x04; //0100
delay(1000); P2=0x08; //1000 delay(1000); }while(1);}
void delay( int k) //Delay function{ int i,j;
for(i=0;i<k;i++) { for(j=0;j<100;j++) {} }
}

KEIL - C CODE FOR FULL DRIVE#include<reg51.h>void delay(int);void main(){
do { P2 = 0x03; //0011 delay(1000); P2 = 0x06; //0110 delay(1000); P2 = 0x0C; //1100 delay(1000);
P2 = 0x09; //1001 delay(1000); }while(1);}
void delay(int k) //Delay function{ int i,j; for(i=0;i<k;i++) { for(j=0;j<100;j++) {} }}

KEIL - C CODE FOR HALF DRIVE#include<reg51.h>void delay(int);void main(){ do { P2=0x01; //0001 delay(1000);
P2=0x03; //0011 delay(1000);
P2=0x02; //0010 delay(1000);
P2=0x06; //0110 delay(1000);
P2=0x04; //0100 delay(1000);
P2=0x0C; //1100 delay(1000);
P2=0x08; //1000 delay(1000);
P2=0x09; //1001 delay(1000);
} while(1);}
void delay(int k) //Delay Function{ int i,j; for(i=0;i<k;i++) { for(j=0;j<100;j++) {} }}

INTERFACING BIPOLAR STEPPER MOTOR Bipolar stepper motors have no center tap and having
equal coil resistances. It can be easily interfaced with a microcontroller using
L293D DC Motor Driver IC.

KEIL-CODE FOR BIPOLAR STEPPER MOTOR#include<reg51.h>void delay(int);void main(){ do { P2=0x01; //0001 delay(1000); P2=0x04; //0100 delay(1000); P2=0x02; //0010 delay(1000);
P2=0x08; //1000 delay(1000); }while(1);}
void delay(int k) //Delay function{ int i,j; for(i=0;i<k;i++) { for(j=0;j<100;j++) {} }}

PROTEUS –MOTOR INTERFACING

SEVEN SEGMENT DISPLAY INTERFACING

Seven Segment Display which is most commonly known as SSD is an output device which can be used to display information.
SSDs are also composed of individual LEDs and work on the very same principle. So basically they come in two forms
Common Anode Common Cathode

FOR COMMON CATHODE Connect INPUT VOLTAGE to A Connect GROUND to COMMON
FOR COMMON ANODE Connect INPUT VOLTAGE to COMMON Connect GROUND to A

PIN DESCRIPTION OF STANDARD SSD

SEVEN SEGMENT INTERFACING #include <reg51.H> #define input P1 #define output P2 unsigned char ssd[16] = { 0x7E, 0x30, 0x6D, 0x79, 0x33, 0x5B, 0x5F,0x70,0x7F,
0x7B, 0x77, 0x1F, 0x4E, 0x3D, 0x4F, 0x47 };
void main() { //declare PORT1 as INPUT input = 0xFF; while(1) output = ssd[ input ]; }

PROTEUS - SSD INTERFACE

SWITCH

KEIL -SWITCH INTERFACE#include <reg51.h>#define button P1_0#define led P1_1
void main(){ button = 1;
led = 0;while(1){
if(!button)led = 1;
elseled = 0; }}

PROTEUS-SWITCH INTERFACE WITH 8051