Elements of Differential Geometry - Springer978-1-4612-1508-0/1.pdf · Appendix A Elements of...
58
Appendix A Elements of Differential Geometry In this appendix we review some basic facts from differential geometry that are frequently used in the geometric theory of multidimensional dynamical systems. As main references for the omitted details and for further reading, we recommend Spivak [348], GuilleminandPollack [148], Abraham and Marsden [4], or Abraham et al. [5]. For a brief introduction to differential forms and their applications to Hamiltonian systems, we refer the reader to Meyer and Hall [271]. A.I Manifolds The main topic of differential geometry is the properties of differentiable manifolds and maps defined on them. Intuitively, manifolds can be thought of as "smooth surfaces" in some ambient space. While they can be defined as more abstract objects (see, e.g., Spivak [348]), we view them as embedded in a finite- or infinite- dimensional vector space. Specifically, M c IR n is called a manifold if it is locally diffeomorphic to IRk, i.e., any point P E M has a neighborhood V in M which is diffeomorphic to an open set U C IRk. 1 The integer k is called the dimension of M (denoted by dim M). A diffeomorphism ¢: U ---+ V gives a parametrization of V, while the inverse map ¢ -1: V ---+ U is called a coordinate system on V. If for any p E M there exists a class-C' parametrization ¢: U ---+ V with p E M such that ¢ -1 is also of class C,., then the manifold M is said to be of class C,. . 1 V C X is a (relatively) open subset of X c ]R11, if it can be written in the form W n X, where W is an open subset of ]R11 .
Transcript of Elements of Differential Geometry - Springer978-1-4612-1508-0/1.pdf · Appendix A Elements of...

Appendix A Elements of Differential Geometry
In this appendix we review some basic facts from differential geometry that are frequently used in the geometric theory of multidimensional dynamical systems. As main references for the omitted details and for further reading, we recommend Spivak [348], GuilleminandPollack [148], Abraham and Marsden [4], or Abraham et al. [5]. For a brief introduction to differential forms and their applications to Hamiltonian systems, we refer the reader to Meyer and Hall [271].
A.I Manifolds
The main topic of differential geometry is the properties of differentiable manifolds and maps defined on them. Intuitively, manifolds can be thought of as "smooth surfaces" in some ambient space. While they can be defined as more abstract objects (see, e.g., Spivak [348]), we view them as embedded in a finite- or infinitedimensional vector space. Specifically, M c IRn is called a manifold if it is locally diffeomorphic to IRk, i.e., any point P E M has a neighborhood V in M which is diffeomorphic to an open set U C IRk. 1 The integer k is called the dimension of M (denoted by dim M). A diffeomorphism ¢: U ---+ V gives a parametrization of V, while the inverse map ¢ -1: V ---+ U is called a coordinate system on V. If for any p E M there exists a class-C' parametrization ¢: U ---+ V with p E M such that ¢ -1 is also of class C,., then the manifold M is said to be of class C,. .
1 V C X is a (relatively) open subset of X c ]R11, if it can be written in the form W n X, where W is an open subset of ]R11 .

372 A. Elements of Differential Geometry
FIGURE A.I. Examples of sets that are not differentiable manifolds.
If M and L are both manifolds and L C M, then L is called a submanifold of M. In such a case the codimension of the manifold L in M is the difference in their dimensions, i.e.,
codim (L, M) = dim M - dim L.
A codimension-one submanifold of M is usually referred to as a hypersurface in M. Well-known manifolds are the line, the circle, the torus, and the sphere embedded
in a finite-dimensional Euclidean space. At the same time, the two intersecting lines shown in Fig. A.I do not form a one-dimensional manifold, since any open neighborhood U of their point of intersection is a "cross" with open legs, which is not diffeomorphic to any open subset of lR'.. The infinite spiral in the same figure is not a manifold either, since any open neighborhood of the point p within the spiral contains a semi-infinite line that is not open. Finally, the closed interval of ]R (shown in Fig. A.I) is not a manifold in the above sense, since any (relatively) open neighborhood U of its endpoint is an interval closed from above. This last example, however, is a manifold with boundary, i.e., it is a subsetof]Rn that is locally diffeomorphic to some open subset ofthe upper-half space Hk of]Rk.2 Indeed, any relatively open neighborhood of a point in the closed interval is diffeomorphic to a relatively open subset of [0, 00). In general, the boundary of M (denoted by aM)is the set of points that map into the boundary of Hk under some local coordinate system ¢-l. The interior of a manifold with boundary is defined as lnt (M) = M - aM. Note that Int(M) is a k-dimensional manifold, while aM is a (k - I)-dimensional boundaryless manifold.
A.2 Tangent, Cotangent, and Normal Bundles
If ¢: U ~ V C M is a local parametrization for the k-dimensional manifold M with ¢(q) = P E V, then we define the tangent space at p as the k-dimensional linear space
2The upper-half space of JPlk is the set Hk = {x E JPlk I x j "'= o} .

A.2 Tangent, Cotangent, and Normal Bundles 373
FIGURE A.2. Visualization of the tangent space.
where the derivative mapping d¢q: jRk ~ jRn is defined as
d¢ ()- r ¢(q+hv)-¢(q) q v - h~ h .
Any textbook on differential geometry can be consulted for a proof that the definition of Tp M is independent of the parametrization ¢ we choose. A tangent vector to M at p E M is an element of the linear subspace TpM. The normal space NpM is the orthogonal complement of Tp M in jRn. Its dimension is therefore n - k.
Another space used in Hamiltonian dynamical systems is the cotangent space T; M, which is just the dual of Tp M, i.e., the space of real-valued linear maps defined on TpM.
Note that as defined, TpM is an independent entity, not d linear space tangent to the manifold M. Such a "tangent" space can be obtained by adding all possible tangent vectors to the point p E jRn, i.e., looking at the parallel translate p + TpM (see Fig. A.2). Keeping track of all tangent spaces to a manifold is not an easy task if one relies just on the intuitive notion of tangent spaces suggested by Fig. A.2: One might imagine that these spaces overlap. To avoid such confusion, it is useful to introduce an abstract object, the tangent bundle of M, which is defined as
T M = { (p, v) I p E M, v E TpM } .
Points in different tangent spaces of M are automatically different elements of T M, since their base points p are different. The definitions of the normal bundle and the cotangent bundle are analogous:
N M = { (p, v) I p E M, v E NpM } ,
T*M={(p,v)1 pEM, VET;M}.
T M, N M, and T* M are differentiable manifolds: If M is of class C, then T M, T* M, and N M are of class Cr - 1• The dimension of T M and T* Mis 2k, while the dimension of N M is n. This shows that unlike T M and T* M, N M is not intrinsic to the manifold M, but depends on the ambient space jRn.
In general, a vector bundle V over a base manifold M is a set of the form
V = { (p, v) I p E M, v E VI' } ,
where Vp is a linear space that has the same dimension for all p and depends smoothly on p. Note that T M, N M, and T* M are all vector bundles over M.
374 A. Elements of Differential Geometry
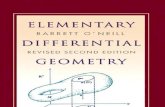
FIGURE A.3. A trivial and a nontrivial vector bundle.
Sub bundles of T M, N M, and T* M are defined as subsets that are vector bundles over M. For instance, a su bbundle S of N M is a set of the form
S = { (p, v) I p E M, v E Sp c NpM } .
The Whitney sum of two such subbundles Sand P of N M is defined as
S EB P = { (p, v) I p E M, v E Sp + PI' C NpM } .
A vector bundle V over M is called trivial if it is a cross product, i.e., there exists a diffeomorphism 1j.r: V -* M x JRq that restricts to a linear isomorphism Tp M -* {p} x JRq for any base point p EM. A well-known example of a manifold with a trivial tangent bundle is the cylinder SI x JR, while the tangent bundle of the Mobius strip is not trivial. In fact, these objects are trivial and nontrivial vector bundles themselves, respectively (see Fig. A.3). All vector bundles are locally trivial, but this is not true globally.
If L is a codimension-m submanifold of M, then the normal bundle to L in M is defined as
N(L, M) = { (p, v) I pEL, v E TpM, v -.l TpL } .
An important fact is that near a submanifold with a trivial normal bundle one can always define a global coordinate system. In particular, N(L, M) is trivial if and only ifthere existm independent functions gl, ... , gm: U -* JR with LeU c M, such that
L = {p E U I gl(p) = 0, ... , gm(P) = O}.
Both the tangent and the normal bundles can be defined for manifolds with boundary with appropriate modifications.
A.3 Transversality
Two manifolds Land M in JRn are said to intersect transversely at pEL n M if
TpL + TpM = JR",
i.e., the two tangent spaces at p span the ambient space (see Fig. A.4). If Land M intersect transversely at all points pEL n M, then they are said to be transverse

A.4 Maps on Manifolds 375
L
FIGURE A.4. Transverse intersection of manifolds.
to each other (denoted by L rh M). In such a case the set L n M is a submanifold of both Land M, and we have
codim (L n M) = codim L + codim M,
which is a useful necessary condition for transversality. For instance. if the codimension of the manifold L is I, and the codimension or M is m, then their intersection cannot be transverse if its codimension is not 1+ m. Transverse intersections are "robust," i.e., they cannot be removed by small, smooth deformations of the two manifolds involved. Two submanifolds L I, L2 C M are said to inteI ;,.;ct transversely at p within M if
Again, a necessary condition for this to hold is
codim (Ll n L2) = codim LI + codim L2,
where the codimensions are taken with respect to the manifold M. Note that even if LI rh L2 within M, LI and L2 need not be transverse to each other within the ambient space]Rn. But LI yj'l L2 within M implies LI yj'l L2 within]Rn.
A.4 Maps on Manifolds
Let f: X -+ Y be a map between two manifolds with dim X = k, dim Y = l. Consider a point x E X and let y = f(x) E Y. Let ¢: U -+ X and 1{1: V -+ Y be local parametrizations of the manifolds near x and y, respectively. Suppose that ¢(O) = x and 1{I(O) = y.1f U is small enough, we can define a map h: U -+ Vas

376 A. Elements of Differential Geometry
h = 1/r-l 0/0 ¢, i.e., by requiring the following diagram to commute:
f
X ~ Y
¢ t u ~ V
h
Note that h is a map between subsets of Euclidean spaces, and hence its derivative is defined is the usual way. We define the derivative of / at x (denoted by d/x) by requiring the following diagram to commute:
dfx
Tx X ~ TyY
d¢o t t d1/ro ]Rk ~ ]Rl
dho
This means that d/x = d1/ro 0 dho 0 d¢OI, and hence the chain rule holds. It can be verified that this definition is in fact independent of the choice of ¢ and 1/r.
To be consistent with the notation customary in other subject areas, we shall occasionally write d/(x), Dx/, or D/ for d/x . In all cases a vector argument/or the linear operator dft will be put in square brackets, i.e., we shall write d/x[u], d/(x)[u], or Dx f[u]. This is to express the fact that d/x is a differential one-form (see Section A. 10 below).
If d/x is an isomorphism, then the inverse function theorem guarantees the existence of an inverse map
which is also an isomorphism. In this case / is called a local diffeomorphism at x. If dft is only injective, then / is called an immersion at x. If d/x is surjective, then / is said to be a submersion at x. A map /: X ~ Y is proper if the preimage of every compact set in Y is compact in X.
An injective and proper immersion is called an embedding. If /: X ~ Y is an embedding, then it maps X diffeomorphically onto a submanifold of Y (see the references cited earlier). Otherwise, an injective local diffeomorphism need not map X into a submanifold of Y. For instance, an infinite spiral on the plane can be generated as the image of ]R I under an injective local diffeomorphism, but it is not a manifold, as we noted earlier. As we shall discuss later, stable and unstable manifolds in dynamical systems are manifolds only locally. As global objects, they are in general only injectively immersed. We shall refer to such subsets of a manifold as injectively immersed submanifolds.

A.6 Lie Derivative 377
A.5 Regular and Critical Points
A useful way to define submanifolds is to specify them as the preimage of a point under a map f: M --* N between two manifolds. A point q E N is called a regular value for f if f is a submersion at every point f-I(q). The preimage theorem states that if q is a regular value for f, then f-I(q) is a submanifold of M, with its dimension equal to dim M - dim N. In particular, if N == JR, then for any regular value q E JR, the level set f-I(q) is a codimension-one submanifold of M. Furthermore, if (qrnin, qmax) C JR is an open set of regular values for f, then for any pair ql, q2 E (qmin, qmax) the manifolds f-I(ql) and f- l(q2) are diffeomorphic (see Milnor [280] for a proof).
If q is not a regular value of f, it is called a critical value. By Sard's theorem the critical values of f form a measure zero set on N. If q is a regular value, then points in f- I (q) are called regular points. A point p is called a critical point if dfp is not surjective.
Let M be an n-dimensional manifold without boundary and let f: M --* JR be a class C2 map. Assume that p E M is a nondegenerate critical point for f, i.~-:-; it is a critical point with the property that the second derivative D2 f(p) is a nonsingular, symmetric bilinear form on the tangent space Tp M. 3 Then the Morse lemma states the existence oflocal coordinates (XI, ... , xn) near p such that
f(p + x) = f(p) + (D2 f(p)x, x).
In other words, near a nondegenerate critical point f is locally equivalent to its quadratic part plus its value at the critical point. Infinite-dimensional extensions of the Morse lemma and their applications are surveyed in Buchner et al. [54] and Buchner et al. [55].
A.6 Lie Derivative
A vector field on a manifold M is a map M --* T M, p H- (p, v(p», where v(p) E TpM.4 The Lie derivative of a smooth function f: M --* JR with respect to a vector field v is defined as
Lvf (p) = dfAv(p)].
The meaning of this derivative is that it gives the rate of change of the function f at the point p under the flow induced by the differential equation p = v(p). Indeed, if pet) denotes a solution of this differential equation, then we have
:tf(P(t» = dfx[p(t)] = Lvf(p(t».
3 Note that for M == Rn, D2 i p is just the bilinear form represented by the Hessian matrix of second derivatives.
4We shall often "abuse" this definition and refer to v(x) itself as a vector field.

378 A. Elements of Differential Geometry
The Lie bracket [u, v] of two vector fields u and v on M is defined as the vector field that satisfies
It turns out that [u, v] is a well-defined, bilinear, skew-symmetric operation, which satisfies the Jacobi identity
[u, [v, wJ] + [v, [w, u]] + [w, [u, vJJ = o.
A.7 Lie Algebras, Lie Groups, and Their Actions
A Lie algebra is a vector space L with a bilinear, skew-symmetric operation [ " . J : L x L -f L, that satisfies the Jacobi identity
[u, [v, wJJ + [v, [w, uJ, uJ + [w, [u, v]] = 0
for all u, v, w E L. An example of a Lie algebra is the set of vector fields defined on a manifold M with the Lie bracket operation.
A Lie group is a smooth manifold that is also a group such that the group operations (multiplication and inverse) are smooth maps. For instance, the circle SI and the torus 1['2 are Lie groups. A Lie subgroup of a Lie group is a subgroup of G that is an injectively immersed submanifold in G. s
For every element g of a Lie group G, we can define the left and right translations by g as L g : G -f G, h f-+ gh, and R~: G -f G, h f-+ hg. Both of these maps are diffeomorphisms. Since G is a manifold, we can define a vector field on it by specifying a vector v(g) E TgG for every g E G. In particular, if e EGis the identity element of a Lie group G, then for any vector ~ E Te G, we can define the following vector field vs:
vI; (g) = dLg(e)[H
Roughly speaking, VI; is the "propagation" ofthe tangent vector ~ along G through the linear mapping dLg(e): TeG -f T~G. In this sense, every element of the tangent space TeG induces a vector field on G. This fact enables us to define a bracket operation on the linear space TeG as follows:
[~, I]Jc = [VI;, V'I] (e),
where the bracket on the right-hand side is just the Lie bracket of two vector fields, as defined in Section AA. Note that with the bracket operation [ " . JG : TeG x Te G -f Te G, the vector space 9 == Te G becomes a Lie algebra, which will be called the Lie algebra ofG.
5 A subgroup will not necessarily be embedded in G. For instance, if G E 11'2 c rc2 ,
then the one-parameter subgroup gt = (e it , eiJ2t ) is a dense winding of the torus, i.e., it is not an embedded submanifold. However, it is injectively immersed.

A.8 Orbit Spaces 379
Using left translations, we can associate a one-parameter Lie subgroup of G to any vector; E TeG such that; will be tangent to the subgroup at the identity element e. The construction is simple: One just considers the trajectory of the vector field v~ (introduced above) that passes through e. The usual notation for this trajectory is </>~: IR ~ G, t f-+ exp(t;).
The main significance of Lie groups in dynamical systems is that they can be used to describe continuous symmetries. In the description of a symmetry, the concept of a group action is of fundamental importance. By the action of a Lie group on a manifold M we mean a smooth map <1>: G x M ~ G such that <I>(e, p) = p for all p E M, and <I> (g, <I>(h, x)) = <I>(gh, x). For any g E G, the notation <I> g = <I>(g, .) is customary. The orbit of p E M under an action <I> is the set
yep) = {<I>g(p) I g E G}.
An action <I> is called free if for any fixed p EM, the map g f-+ <I> g(p) is one-toone, i.e., different group elements "fed" into <1>( • , p) will result in different image points on M. The action <I> is called proper if the mapping (g, p) f-+ (g, <I>(g, p)) is proper.
Given any action <I> on a manifold M, one can associate an action of IR on M to any element; of the Lie algebra g. The idea is to consider the one-parameter subgroup </>~ we introduced above and restrict the action <I> to this subgroup. More precisely, the action oflR corresponding to; E TeG is defined as
<I>~ : IR x M ~ M,
(t, p) f-+ <I>(exp(t;), p).
The vector field
d ;(p) = dt <I>(exp(t;), p)lt=o
is called the infinitesimal generator of <I>~ .
A.8 Orbit Spaces
Symmetries in a problem can often be used to reduce its dimension. For instance, in classical mechanics cyclic coordinates can be eliminated by a classic procedure due to Routh. Geometrically, this procedure views the phase space of a dynamical system as a union of all possible orbits under the action of the Lie group Sl . One then "factorizes" the phase space with respect to these orbits, i.e., puts all points along a given group orbit into the same equivalence class. Passing to the set of all equivalence classes, or the orbit space, then reduces the dimension of the problem by one. In general, one can carry out this reduction procedure for any group action on a manifold M. Let M / G denote the set of orbits for an action <I> of G. This orbit space is usually called the quotient space. It can be shown that if the action

380 A. Elements of Differential Geometry
of G on M is proper and free, then M / G is a manifold (see, e.g., Abraham and Marsden [4]).
A.9 Infinite-Dimensional Manifolds
The concept of a differentiable manifold can be extended naturally to infinite dimensions, i.e., one can picture them as smooth surfaces embedded in some infinite-dimensional vector space. However, the subject is more technical than in finite dimensions, and one is forced to resort to a more abstract definition of manifolds. In this abstract setting, a manifold will be an object that locally looks like a Banach space (see Appendix B.3 for the necessary definitions from functional analysis). As references on infinite-dimensional manifolds, we suggest Lang [223] and Abraham et al. [5].
We start with a general topological space M and a Banach space E. Assume that M has an open covering {Va} and for every Va there exists a homeomorphism 1/1: Va ---+ Va onto an open set Va C E. Assume that the "overlap map"
1/Ia 0 1/Ii l : 1/IfJ (Va n VfJ) ---+ Va
is of class C' for any ct and f3 (see Appendix B.4). Then M is called a C' manifold modeled over the Banach space E. A chart for M is a homeomorphism 1/1: V ---+ V between the open sets V C M and VeE such that for all ct, the map
1/1 0 1/1;;1: 1/Ia(Va n V) ---+ Va
is of class Cr ~ The collection of all charts defined in this way is called a maximal atlas for M.
In contrast to the finite-dimensional case, the above definition of a manifold is not based on local parametrizations. The reason is that one wants to avoid strong assumptions about a possible "ambient" space and the differentiability of local parametrizations. Instead, all differentiability assumptions are formulated in terms of maps between subsets of E. For instance, a continuous map f: M ---+ N between two manifolds modeled over E and F is said to be of class C' if for every chart 1/1: V C M ---+ VeE and for some CPa: Va C N ---+ Va C F, the map
CPa 0 f 0 1/1-1: 1/IU- I (Va) n V) ---+ Va
is of class C'. By the chain rule and by our assumption on the overlap map, this property will hold for all ct if it holds for one particular ct. Furthermore, the definition turns out to be independent of the chart 1/1.
The tangent, cotangent, and normal spaces, as well the various vector bundles associated with M, can be defined in analogy with their finite-dimensional counterparts. The only difference is that all definitions are now formulated in terms of charts. As we shall not use details of these constructions in later chapters, we refer the reader to the references cited above for more information. In the following sections, we shall keep our discussion finite dimensional, and mention the analogous infinite-dimensional concepts only if they require significantly different treatment.

A.1O Differential Forms 381
A.IO Differential Forms
We now turn to defining functions on the tangent bundle of a manifold. The simplest such definition involves a multilinear function defined on every tangent space Tp M of a manifold M. If these multilinear functions depend smoothly on p, then we shall call the resulting collection of functions a differential form on M.
To develop this idea more precisely, let us consider a vector space V and its m-fold Cartesian product
V rn =V x··· x V. '-v-'
m times
An m-tensor on V is a function T: vrn ~ lR, that is multilinear, i.e., linear in each of its arguments. A well-known example of an m tensor is the determinant map T(VI, ... , vm) = det [VI, ... , vrn].
An m-tensor T is called alternating if its sign is reversed whenever two variables are interchanged:
T( ... , Vk, ... , VI, ... ) = -T( ... , VI, .. ·, Vk> .. . ).
By elementary linear algebra, the determinant is also an example of an alternating tensor. Note that if m > n, then the only alternating m-tensor on ]Rn is the identically zero tensor.
It is useful to introduce the integer vector Jr E 7L,m with 1 :s Jri :s m and Jri =1= Jrj
for i =1= j to describe permutations in the order of the arguments of T. In particular, the Jr-permutation ofT is defined as
Tlr (VI, ... , Vrn) = T(vlr1 , ... , vlr,,,).
The permutation Jr is considered even (odd) if it can be expressed as an even (odd) number of simple transpositions of two variables. Using the notation
(-It = I +1, -1,
Jr is even,
Jr is odd,
it is not hard to verify that if T is an arbitrary m-tensor, then
Alt(T) = ~ 2)-1)lrTlr m! lr
is an alternating m-tensor, with the summation taken over all possible permutations of the numbers 1, ... , m.
The tensor product of an l-tensor S and an m-tensor T is defined as the (l + m)-tensor
S ® T(VI, ... , Vl+rn ) = S(VI, ... , VI) . T(Vl+l, ... , Vl+m).
This product is not commutative, i.e., in general S ® T =1= T ® S. Another important product defined between two arbitrary tensors is the wedge product
SAT = (l +m)! Alt(S ® T), l!m!

382 A. Elements of Differential Geometry
where S is an I-tensor and T is an m-tensor.6 The two identities
then follow easily by definition. By associativity, the wedge product of arbitrarily many tensors can be defined recursively. For example,
Q 1\ R 1\ S 1\ T = Q 1\ (R 1\ (S 1\ T».
As an example, consider the case of V = ]R2, and for all v = (vx, vy) let
S(v) = vx , T(v) = vy.
Both Sand T are I-tensors and hence are automatically alternating. Their tensor product
S 1&1 T Cu, v) = S(u)· T(v) = uxvy
is a 2-tensor that is clearly not alternating. However, the wedge product
2! S 1\ T (u, v) = 1!l! Alt (S 1&1 T) (u, v) = S(u) . T(v) - S(v) . T(u)
= uxvy - vxuy (A.l)
is an alternating 2-tensor. (Incidentally, S 1\ T (u, v) = det [u, v].) Note the geometric meaning of S 1\ T(u, v): It gives the oriented area enclosed by u and v on the plane.
We are now in a position to introduce the concept of a differential form on a smooth manifold M with or without boundary. A (differential) m-form on M is a real-valued function w defined on the manifold
{(X,VI, ... ,Vm ) IXEM, Vi ETxM}
such that for any fixed x E M, w: TxM ~ ]R is an alternating m-tensor. A differential form therefore assigns an alternating k-tensor to every tangent space of M. If this assignment is of class C (Le., w depends on x in a C fashion), then the differential form is of class C. We will frequently omit the vector arguments in our notation, i.e., w(x) == w(x, .) will simply refer to the m-tensor to which w restricts at x. In this notation the application of the tensor w(x) to a set of vectors VI , ... , Vm E Tx M is denoted by w(x)[ v I, .•. , Vm J == w (x, VI , ... , vm ) .
Another useful notation is
ivw = w[v, ... J, (A.2)
i.e., if w is ak-form on a manifold M and v is a vector field on M, then ivw denotes the (k - I)-form on M that is obtained by fixing v(x) as the first argument of w(x). The form ivw is sometimes referred to as the inner product of v and w.
6Some textbooks on differential geometry do not include the factor (I + m)!/ (I!m!) in the definition of S 1\ T. We chose to include it, following Spivak [348] and Abraham and Marsden [4], in order to conform to the tradition in classical mechanics.

A.ll Maps and Differential Forms 383
Note that 0-forms are just real-valued functions on M. Furthermore, by our earlier observation on alternating tensors, any m-form with m > dim M is identically zero on M.
The pointwise linear combination of two m-forms WI and W2 on M gives another differential form, Le., (awl + (3(2)(X) = aWl (x) + (3W2(X) defines a m-form on M. Similarly, for an i-form WI and an m-form W2,
(WI /\ (2) (x) = WI (x) /\ W2(X)
defines an (l + m)-form on M, the wedge product of WI and W2. A commonly used I-form is the derivative w(x) = dfx of a smooth map f. Of
particular interest is the case where f(x) = Xi is just the ith coordinate function on R,n. Then any m-form W on an open set U C R,n can be expressed as
w(x)= L Wj(X)dXjl/\···/\dxj"" (A.3) jl < ... <j",
with summation over increasing index sequences i = Cil, ... , im) (see, e.g., Guillemin and Pollack [148]). In particular, any two-form on the plane R,2 can be written as w(x) = a(x)dxI /\ dX2 for some real-valued function a.
A.11 Maps and Differential Forms
Suppose that w(y) is an m-form on the manifold Y and f: X ---+ Y is a class cr map. Then f can be used to "pull back" W from Y to X, i.e., to define an m-form on X. More precisely, the pullback of W by f (denoted by f*w) is defined as
f*W(X)[VI, ... , vm] = w(f(x))[dfxVI,"" dfxvm].
In the case of a O-form the above definition simply gives the change of variables f*w = w 0 f. Generally, the pullback is a linear operation with the additional properties
f*(WI /\ (2) = f*wI /\ f*W2, (f 0 h)* W = h* j*w.
An important use of the pullback is the change of coordinates for integration (see Section A.18). To see how forms transform under a coordinate change on R,n, assume that f: U ---+ V is a diffeomorphism between two open sets in R,n and let fey) = x. The change of coordinates x r+ y for a differential form is equivalent to passing to the pullback of the form by f. Concretely, consider the n-form w(x) = dXI /\ '" /\ dXn (which is just the standard volume form on R,n). Then the following formula can be proved (see, e.g., Guillemin and Pollack [148]):
f*(dxI /\ ... /\ dxn)(y) = det (dfy) (dYI /\ ... /\ dYn) (y). (A.4)
We note finally that if the map f: X ---+ Y is a diffeomorphism, then a differential form defined on X can be "pushed forward" into a form defined on Y. Specifically, if w(x) is an m-form on X, then the pushforward of w by f (denoted by f* w ) is

384 A. Elements of Differential Geometry
defined as
l*w(Y)[VI,.'" v",] = w(f-I(y))[dl;I VI , ... , diy-IV",].
For the properties and the use of the pushforward, see Abraham and Marsden [4].
A.12 Exterior Derivative
The derivative of a differential form can be defined as follows. Consider first an m-form W defined on an open set U c Rn. Then W can be represented in the general fOlm (A.3) with its exterior derivative defined as the (m + I)-form
dw= L d(Wj)xAdxhA···Adxj", . . h<···<jm
This definition gives the properties
d(awl + fJ(2) = adwI + fJdw2,
d(wl A (2) = (dwI) A w2 + (-l)"'wl A dW2, (A.S)
for scalars a and fJ and for an m-form WI. In addition, the "cocycle condition"
d(dw) = 0 (A. 6)
holds. It turns out that the d operator defined above is the only operator that has these properties and agrees with the usual derivative for O-forms (cf. Guillemin and Pollack [148]). Furthermore, if I is a differentiable map between open sets of lR, then
d(f*w) = /*(dw), (A.7)
i.e., exterior differentiation and pullback by I are commuting operations. Exterior differentiation can be extended to forms on arbitrary manifolds through
a local construction. Let w be an m-form on the manifold M and let ¢: U -? M be a local parametrization of M with an open set U C lR'.n. Then the exterior derivative dw is defined on ¢(U) as
dw = (¢-I)* d(¢*w) = ¢*d(¢*w).
In words, we first pull back w to U, perform the differentiation, then push the result forward to M. It is straightforward to show that dw is independent of the parametrization,7 and hence dw is a well-defined (m + 1 )-form on M with the properties (A.S)-(A. 7).
7 Hint: Take another local parametrization 1jf: V ---+ M, let g = rp-I o1jf, and apply formula (A.7) to g*d(¢*w).

A.15 Volume Forms and Orientation 385
A.13 Closed and Exact Forms
A closed m-form W on M is defined as an m-form with dw = O. An m-form is called exact if it is the derivative of another form, i.e., there exists a (m - I)-form lJ
such that w = dlJ. Note that exact forms are closed, since d(dlJ) = 0 by (A6). The question whether closed forms on a manifold M are exact turns out to depend on the topology of the manifold and leads to the introduction of cohomology classes. In this book we shall use only the fact that every closed m-form with m > 0 is exact on ]Rk.
A.14 Lie Derivative of Forms
The idea of the Lie derivative (cf. Appendix A6) can be extended to general differential forms. If v(x) is a vector field on a manifold M, P': M ~ M is the flow generated by v, and w is a differential form on M, then the Lie derivative of w with respect to v is defined as
Lvw = :t (p;w),=o·
Using the notation introduced in (A2), we have the following useful formula for the Lie derivative of w:
(A8)
A.IS Volume Forms and Orientation
The standard volume form on]Rn is just the n-form
w = dXI /\ ... /\ dxn.
Any scalar multiple of this form is also a volume on ]Rn. In general, a volume on a k-dimensional manifold M is a k-form w that is not identically zero at any point of M, i.e., for all x E M we have w(x) i= o.
M is called orientable if there exists a volume on M. In such a case two volumes WI and W2 are said to be equivalent if there exists a smooth map f: M ~ ]R+ such that for all x E M, WI(X) = f(X)W2(X). An orientation on M is an equivalence class [w] of volumes on M. For instance, on M = ]R2 there are precisely two orientations: one given by volumes equivalent to dXI /\ dX2 and the other by volumes equivalent to dX2 /\ dXI . This example in fact generalizes to the following result: Every connected, orientable manifold has precisely two orientations (see, e.g., Abraham and Marsden [4] for a proof). A famous example of a nonorientable manifold is the Mobius strip.
Let Land M be two orientable manifolds of the same dimension with volumes WL andwM. A smooth map f: L ~ M is called volume-preserving if t*WM = WL.

386 A. Elements of Differential Geometry
The same map is called orientation-preserving if !*(WM) E [wd, and orientationreversing if !*(WM) E [-wd.
If M is an orientable k-dimensional manifold with boundary, then an orientation on M induces a boundary orientation on a M as follows. At every point pEa M, let VI, ... , Vk-I E Tp (aM) be a basis for Tp (aM). Let ¢: V -+ M with V C Hk be an orientation-preserving local parametrization such that ¢(O) = p. Let p be the outward unit normal to the positive half-space Hk at o. We say that VI, ... , Vk-I is positively oriented if (d¢op, VI, ... , Vk-I) is a positively oriented basis in TpM, i.e.,
This orientation is called the induced orientation on aM, and it can be shown to be independent of the choice of ¢.
A.16 Symplectic Forms
A nondegenerate 210rm on M is a 2-form W such that for any x E M the following is satisfied: If w(x)[u, v] = 0 for all V E T.tM, then u = o. Equivalently, w is nondegenerate if for every x E M and u E TxM, the linear map WD(X, u): T.rM -+ Tr* M defined as
WD(X, u) = w(x)[u, .]
is an isomorphism. In such a case the inverse map
w~(x) : Tx* M -+ TxM,
WO(x) = [wD(x)r l ,
is also an isomorphism, which associates a tangent vector in Tx M to every linear functional defined on Tx* M. This latter map wiII prove very useful in the theory of Hamiltonian systems.
Note that non degenerate 2-forms exist only on even-dimensional manifolds. A closed, nondegenerate 2-form w on a 2n-dimensional manifold M is called a symplectic form, and M is said to be endowed with a symplectic structure. The pairing (M, w) is usually referred to as a symplectic manifold. It is not hard to see that the 2n-form wn defines a volume on M, which we shall denote by Qill.8
A symplectic map between two symplectic manifolds (MI, WI) and (M2, (2) of the same dimension is a map f: MI -+ M2 with the property f*W2 = WI. Since !*w2 = (f*W2t , we have
i.e., f preserves the volumes induced by the symplectic forms.
8The notation of refers to the n-fold wedge product of cv with itself.

A.I7 Poisson Brackets 387
According to Darboux's theorem (see, e.g., Abraham and Marsden [4)), near any point on a 2n-dimensional symplectic manifold (M, w) there exist local coordinates (q, p) E ~2n in which w becomes canonical, i.e., it can be written as
n
W = dq /\ dp = L dqi /\ dPi' i=l
If u = (u q , up) and v = (vq , vp) are vector fields on M, then by (A.I) we have
(A.9)
where ( " .) denotes the Euclidean inner product. We close this section by briefly discussing symplectic forms defined on infinite
dimensional manifolds. Let M be a manifold modeled over a Banach space E (cf. Appendix A.9). A weakly nondegenerate 2-form on M is a 2-form w such that the linear map wt>(x, u): TyM ~ Tx* M is injective, i.e., w(x)[u, v] = 0 for all vET, M implies U = O. We call w strongly nondegenerate if wD is an isomorphism. Note that for finite-dimensional manifolds, weak and strong nondegeneracy are equivalent. In infinite dimensions w is strongly nondegenerate if and only if it is weakly nondegenerate and wD is onto.
In the infinite-dimensional context, a strongly (weakly) nondegenerate, closed two-form on a manifold M modeled over E is called a (weak) symplectic form on M. The infinite-dimensional version of Darboux's theorem guarantees that locally every symplectic form is constant in an appropriate coordinate chart (see, e.g., Weinstein [368] or Marsden [254)). The same statement is not true for weak symplectic forms.
A.I7 Poisson Brackets
On a symplectic manifold (M, w) there exists another structure, called the Poisson structure, which is frequently used in classical mechanics. For two differentiable functions f, g: M ~ R the Poisson bracket {j, g} is defined as
{j, g} = df(w::[dg]),
and (M, { . , . }) is called a Poisson manifold. In the case of
(M, w) = (~2n, dq /\ dp),
the above definition gives the canonical Poisson bracket
{j, g} = t of ~ _ of ~. i=l oqi 0Pi 0Pi oqi
The functions f and g are said to be in involution with respect to the Poisson bracket if {j, g} == O.

388 A. Elements of Differential Geometry
The main properties of the Poisson bracket are the following: bilinearity; skewsymmetry, i.e., {f, g} = {-g, f}; Leibniz's rule:
{f, gh} = {f, g} h - {f, h} g;
and Jacobi's identity:
{f, {g, h}} + {g, {h, f}} + {h, {f, g}} = O.
For further properties and for more general Poisson brackets see Abraham and Marsden [4].
A.I8 Integration on Manifolds and Stokes's Theorem
The idea of differential forms was originally motivated by the need to define integration on an arbitrary manifold. Just as in the case of exterior differentiation, one first defines the integral of a form on ]Rn. Then the integral of a differential form on an arbitrary n-dimensional manifold is defined via "pulling the form back to ]Rn by local parametrizations.
More precisely, let (J) be an n-form on ]Rn and consider its representation (A.3). Define the integral of (J) on a set U C ]Rn as
f (J) = I: f {J)j (x)dxh .. ·dxj", U jl<"'<j" U
with the integral on the right-hand side referring to the usual integration known from multivariable calculus. If f: U -+ V is an orientation-preserving diffeomorphism of open sets in ]Rn, then by formula (AA) we have
which shows how a change of variables for an integral can be performed simply by applying the pullback operation to the form to be integrated.
In view of the above discussion, integration of forms on manifolds can be introduced as follows. Let M be an n-dimensional manifold (with boundary) and let (J) be a differential n-form on M. Assume that (J) is compactly supported, i.e., the closure of the set of points with (J)(x) =1= 0 is compact. If, in addition, the support of (J) is contained in a single parametrizable subset V C M with an orientation-preserving parametrization cp: U -+ V, U C ]Rn, then we define
(A.10)
One can show that the value of this integral is independent of the parametrization cp.
To extend integration to an arbitrary compactly supported n-form (J) on M, consider a covering {Ua} of M by parametrizable open sets. We select a sequence

A.18 Integration on Manifolds and Stokes's Theorem 389
{Pi }~l of smooth functions with the following properties9 : Pi: M ~ [0,1]; each point on M has an open neighborhood in M on which all but finitely many Pi are identically zero; each Pi is identically zero outside a closed set contained in one of the open sets U CI; "E,i Pi == 1. We then define
1 w = f:l Pi W , M i=l M
(A. 1 1)
where the integrals on the right-hand side are well-defined by (A.1O). With the integral of a form defined on an arbitrary manifold, the following
formula can be proved for an n-form wand two n-dimensional manifolds Land M with an orientation-preserving diffeomorphism f: L ~ M:
L w = i j*w.
A classical result from integration on manifolds is the generalized Stokes theorem, which says that the integral of a form on the boundary of an orientable manifold is equal to the integral of the exterior derivative of the form on the manifold (for a proof see any of the references we have cited at the beginning of this appendix). This is a generalization of the theorems of Green, Gauss, and Stokes in two and three dimensions. The precise formulation is as follows: Let M be a compact, oriented, n-dimensional manifold with boundary. Consider the (n - I)-dimensional manifold aM with the induced boundary orientation. Then the generalized Stokes theorem can be stated as
1 w = 1 dw. aM M
9The existence of such a partition of unity subordinate to the cover {UOI ) is a general result from topology (see, e.g., Guillemin and Pollack [148]).

Appendix B Some Facts From Analysis
In this appendix we recall some results from real, complex, and functional analysis. As in Appendix A, we shall avoid the usual "definition-theorem-proof' format for the sake of easier reading. References to sources with full details will be given throughout the text.
B.1 Fourier Series
If fez) is a 2Jl'-periodic, continuous complex function, then it admits a Fourier expansion of the form
fez) = L fk eikz , kEZ
with the coefficients fk defined as
fk = _1 (2n f(z)e-ikzdz. 2Jl'10
The norm of these Fourier coefficients can be estimated in a simple manner if we assume that f is analytic in the 11m zl < a strip of the complex plane. Consider the integral of f(z)e- ikZ on the appropriate rectangle y(k) shown in Fig. B.l with a small positive constant E. Since fez) is analytic in the domain of integration, we have fy(k) fez) e-ikz dz = O. By periodicity in z, the integrals of f(z)e- ikZ on the vertical sides of y(k) cancel out, so we are left with
1 12n l±i(a-E) 0= fez) e-ikz dz = fez) e-ikz dz + fez) e-ikz dz,
y(k) 0 2n±i(a-E)

B.1 Fourier Series 391
i( IT - f) r-----;--------,
i(k) if k < 0
o 'Y(k) if k > 0
- i( IT - f) f-----_--------'
FIGURE B.l. Contour of integration for the integrand !(z)e-ikZ •
which gives the estimate
1 I r2rr . I e-1kl(a-E) I r2rr . I Ilk I = 2n 10 I(z) e- lkz dz = 2n 10 I(z - i (IT - E» e-lkzdz
:::: sup III e-1kl(a-E), IIrnzl<a
which, in the limit E --+ 0, gives
Ilkl:::: sup III e-a1kl . IIrnzl<a
This last estimate shows that the Fourier coefficients of an analytic function decay exponentially.
A similar result can be deduced for functions of several complex variables. Let I(ZI, ... , Zn) be a complex function that is 2n-periodic in each of its arguments. Suppose that I is analytic on the domain
{11m Zj I < IT, j = 1, ... , n} and continuous on the boundary of this domain. With the notation Z = (Zl, ... , Zn) and (k, z) = 'L~=l kjz j , the Fourier expansion of I can be written as
I(z) = L /kei(k.z). kE'l!}'
Here the Fourier coefficients are computed as
Ik = ~ r2rr ... r2rr I(z)e-i(k.z) dZ I ... dzn. (2n) 10 10
An argument similar to the above now gives the estimate
with Ikl = 'LJ=l Ikil.
I/kl:::: sup III e-a1kl Ilrnzjl<a
(B. 1)
One often uses finite Fourier series to approximate a function, in which case the error of the approximation is of interest. If N denotes the order at which the

392 B. Some Facts From Analysis
Fourier series (B.1) is truncated and K E (0, a) is an arbitrary number, then the "tail" of the truncated series can be estimated as
for 11m Zj I < a - K.' The proof of this result can be found, e.g., in Lochak and Meunier [242], along with further estimates on Fourier series and their derivatives.
We also recall a form of Cauchy's inequality from Lochak and Meunier [242] that we use in Chapter 4 in estimating derivatives of analytic functions. Let 1(1,4» be an analytic function on the domain
D(C, p,a) = {(I,4» E em x en IIReII::::: C, IImII < p, 11m 4>1 < a},
and assume that 1 is 2Jl'-periodic in each 4>j, j = l, ... , n. Let K(C, p, a) denote the supremum of III over D(C, p, a). Then for any a E (0, p) and fJ E (0, a), we have
I alkl+lll I alka4>I I(l,4» :::::k j ! .. ·km ! /'!"'/n!a-lklfJ-lilK(C,p,a),
if (I, 4» E D(D, P - a, a - fJ). Again, this latter restriction on the domain of the estimate becomes vacuous if 1 has real arguments.
B.2 Gronwall Inequality
A commonly used tool in dynamical systems theory is an inequality due to Gronwall. Let c(t), u(t), and vet) be positive continuous functions on [0, i]. Let us further assume that c(t) is of class C' and
u(t) ::::: c(t) + 11 u(r)v(r)dr
holds for all t E [0, iJ. Then
u(t) ::::: c(O)eJ~ v(r)dr + 11 c'(r)eJ: v(s)ds dr. (B.2)
For a proof of this inequality see, e.g., Coddington and Levinson [80]. Note that in the special case of c(t) == c, the inequality simplifies to
u(t) ::::: c eJ~ v(r)dr.
I Note that for functions of several real variables 1m Z j = 0, and hence the above estimate is valid without any restriction on the domain.

B.3 Banach and Hilbert Spaces 393
B.3 Banach and Hilbert Spaces
A Banach space is a normed linear space that is a complete metric space with respect to the metric induced by its norm. Specifically, if II . II: E ~ lR is the norm, then all Cauchy sequences in E should converge to a point in E in the metric d(x, y) = Ilx - YII. Classical examples of Banach spaces are finite- and infinite-dimensional vector spaces with the Euclidean norm, and 100 , the space of bounded sequences of complex numbers, with the supremum norm.
A fundamentally important fact is that contraction mappings defined on Banach spaces admit unique fixed points. More generally, let B be a complete metric space2
and assume that f: B ~ B is a contraction mapping, i.e., there exists q E (0, 1) such that
d (f(x), f(y)) ::: qd(x, y).
Then there exists a unique x* E B such that f(x*) = x*. Furthermore, for any x E E, the sequence x, f(x), f 2(x), ... converges to x* (see, e.g., Arnold [20], or Chow and Hale [72] for a more general formulation).
A Hilbert space is a space with an inner product that is a complete metric space with respect to the metric induced by its inner product. This means that if ( " .) : E x E ~ lR is the inner product, then all Cauchy sequences in E should converge to a point in E in the metric d (x, y) = J (x - y, x - y). While all Hilbert spaces are Banach spaces, the converse is not true. For instance, [00 is not a Hilbert space (see, e.g., Young [384]). As for any inner product space, the Cauchy-Schwarz inequality
I(x, y)1 ::: Ilxllllyll
holds in E with Ilx II = ,J\X,X). An important Hilbert space is the space L2(a, b), the space of functions
f: (a, b) ~ CC with -00 ::: a < b ::: +00 that are square integrable, i.e.,
lb If(t)1 2 dt < 00.
An inner product on L2(a, b) is given by
(j,g)L2 = lb f(t)g(t)dt,
which induces the L2 norm
IlfllL2 = lb If(t)1 2 dt.
2 B does not need to be a Banach space, or even a vector space.

394 B. Some Facts From Analysis
Two elements I, g E L2(a, b) are considered equal if they agree almost everywhere, i.e., the points in (a, b) for which I(x) "I g(x) form a set of measure zero.3
Higher-order LP(a, b) spaces with 1 < p < 00 can be defined analogously: I E U(a, b) if
lb I/(t)JP dt < 00.
Note that the space LP(a, b) is a Banach space with the norm
II/IIL!' = (l b I/(t)JP dt) l/p
Finally, the space LOO(a, b) is defined as the set of functions that are measurable and essentially bounded, i.e., admit a supremum outside a measure-zero subset of (a, b). The space LOO(a, b) is also a Banach space with the norm
Ilfllv>c =ess sup I/(t)l. IE(a,b)
B.4 Differentiation and the Mean Value Theorem
Here we briefly discuss differentiation of maps between Banach spaces. We also recall the infinite-dimensional mean value theorem, a generalization of the wellknown result from calculus. For details and complete proofs the reader is referred to, e.g., Lang [224].
Let I: E -+ F be a map between Banach spaces. We say that I is differentiable (or of class C l ) at x E E if there exists a continuous linear map a: E -+ F and a map {3: {x Illxll < 8 } -+ F, such that
I(x + h) - I(x) = a(h) + {3(h),
where {3(h) is o(h) as h -+ 0, i.e.,
lim {3(h) = O. h--*O II h II
It turns out that if such a linear map a exists, then it is unique for fixed x. In that case we calI a the derivative4 of I atx, denoted by Dj(x). If I is differentiable at every point of an open set U c E, then we say that I is differentiable on U. The derivative defined in this way is a linear operator that satisfies
D(fg) = (Df)g + I Dg,
D (f 0 g) (x) = DI(g(x)) 0 Dg(x).
3This also implies that elements of L2(a, b) need not be defined everywhere in (a, b), only almost everywhere. For instance, J(t) = Itl- I / 4 is an element of L 2( -I, I), although it is undefined at t = O.
4This derivative is often referred to as the Frichet derivative of J.

BA Differentiation and the Mean Value Theorem 395
Class-C differentiability for a map f: E -+ F can be now defined in analogy with the finite-dimensional case.
If f is differentiable, then for any h E E, the Gateaux derivative
. 1 Df(x) . h = hm - [f(x + th) - f(x)]
1---+0 t
exists. In fact, this latter formula is the one used in practice to compute the derivative of f once the differentiability of f is known.
The definition of the partial derivative ofa map f: E J x ... x En -+ F is now a straightforward generalization of the well-known partial derivative from calculus. The notation we shall use for mixed partial derivatives is
II j _ a} f(xJ, ... , xn ) D f(xJ, ... , xn ) - . .,
axt ... ax/z" with iii = L};.
As an important example, consider two complex -valued, differentiable functions f: L2 -+ C and F: C -+ C, and assume that f is of the form
feu) = ~ [L F(u(x»dx. L 10
Since f is differentiable at u E e, for any h E L 2 we have
Df(u)· h = lim!~ rL F(u(x) + th(x» - F(u(x»dx
1-+0 t L 10
=lim!~ rL DF(u(x»·th +o(th)dx 1---+0 t L 10
= ~ rL DF(u(x»' hex) dx. L 10
If f: L 2 -+ C is a differentiable function, then its L 2 gradient V f is defined as
Df(u)· h = (V feu), h) = ~ rL V f(u(x»· hex) dx,
L 10
where ( " .) refers to the "canonical pairing." If f depends on several arguments, then the L 2 gradient can be taken with respect to each. For instance, if f also depends on the complex conjugate of u, then the formula
- 1 lL -Duf(u, u) . h = - Vuf(u(x), u(x»· hex) dx L 0
defines the L 2 gradient of f with respect to U. Suppose now that f: U -+ F is a differentiable map from an open set U of a
Banach space E into a Banach space F. Assume that the line segment x + t(y - x)
with t E [0, 1] is contained in U. Then the mean value theorem can be stated as
fey) - f(x) = 1J Df(x + t(y - x»dt . (y - x).

396 B. Some Facts From Analysis
A direct consequence of this last expression is the mean value inequality
Ilf(y) - f(x)IIF ::: lIy - XIlE sup II Df(x + t(y - X»IIF. tErO.I]
We note that the sup in the inequality is necessarily finite, as the derivative is a continuous function of t restricted to the compact line segment.
B.5 Distributions and Generalized Derivatives
Let Q be an open set in ]R" and let V(Q) denote the space of complex-valued class-Coo functions defined on Q that have compact supportS and admit continuous partial derivatives of any order. V(Q) can be endowed with a topology so that it becomes a locally convex, linear topological space. A continuous linear function T: V(Q) -+ CC is called a generalized function or distribution in Q. When T is evaluated on a function ¢ E V(Q), we refer to ¢ as a test function. The distributional derivative DXi T of T with respect to the variable Xi is defined as the linear functional
D,,T(cp) = -T (:~), ¢ E V(Q).
Note that this derivative is also a distribution in Q. As an important example, consider Q = (0, L) and let u(x) be a complex-valued
function that is defined almost everywhere in Q and is also locally integrable in Q.6 Then the functional
T,,(cp) = (u, cp) = ~ {L u(x)rjJ(x)dx, L io cp E V(Q),
is a distribution in (0, L). Two functions UI and U2 are equal in the sense of distributions if we have T,'l(CP) = TU2 (cp) for any test function cpo This is certainly the case if uland u2 are equal almost everywhere.
Distributions can be used to extend operations to general functions that are defined only almost everywhere in Q. Let us define the adjoint A' of a continuous operator A as
(Acp, 1jf) = (cp, A'1jf), cp,1jf E V(Q).
Then the action of A on the distribution Tu introduced above can be defined as
ATu(cp) = (Au, cp) = (u, A'cp).
Si.e., vanish identically outside a compact subset of r2. 6i.e., on any compact subset C of r2 we have Ie I/(x)1 dx < 00.

B.6 Sobolev Spaces 397
For example, if u is a locally integrable function defined almost everywhere on (0, L) , then its generalized derivative can be defined by selecting
. a1jl A == DJ =. . ,
axe··· ax~" with I i I = L ii . Integration by parts 7 gives A' = (-1 )1.; I A, and hence the pairing of the distributional derivative of u with any test function cp can be computed as
(Dj u, cp) = (-l)ljl (u, Dj cp).
B.6 Sobolev Spaces
For any two integers kEN and p ::: 1, let W k•p (a, b) denote the space offunctions that are in V'(a, b) and whose distributional derivatives up to order k are also in LP(a, b). The space Wk,P(a, b) is a Banach space for the norm
k
IIfllwk.p = L liD" fllu. ,,=0
From now on we omit the interval (a, b) from our notation, as we shall only be concerned with functions of a single real variable. Therefore, LP will refer to LP(a, b), and Wk,p to Wk,]J(a, b). We note that the following facts and results continue to hold with appropriate modifications for spaces of functions defined on a general n-dimensional domain (cf. Temam [351]).
In the special case of p = 2, the notation Hk == Wk.2 is customary. Note that Hk is a Hilbert space with the inner product
k
(f, g)w = L (D" f, D"g)L2, ,,=0
and with the norm k
Ilfllw = L liD" fIIL2.
HOO denotes the set of functions that are contained in Hk for any k, and H-k refers to the dual of Hk, i.e" the space of continuous linear functionals defined on Hk. By the Riesz-Frechet theorem (see, e.g., Young [384]), any such functional F: Hk ~ lR can be represented as
F(g) = (f, g)w
for a unique function f E Hk. The duality between H-k and Hk allows us to consider any f E Hk as an operator (f, .) E H-k , where ( . , .) denotes the
7Recall that the support of any function rp is compact in Q, so rp must vanish on the boundary.

398 B. Some Facts From Analysis
duality pairing between H-k and Hk. In view of this, we define the H-k norm of f E Hk as
This definition implies that
IIf11H-k = sup l(f, v)l· IlvllHk=1
IIfllH-k :s IIfllw· By definition, we have Hk C Hk - 1 for any k. It also turns out that Hk is dense in
Hk- 1, implying that Hi is dense in Hk for any I > k. Furthermore, the embedding of HI into Hk is compact, and hence the unit ball of HI is compact in Hk for all I > k (see, e.g., Lions and Magenes [240] for proofs).
In Chapter 5 we consider Hk functions of a single real variable x that are periodic with period L > 0. The customary notation for the space of such functions is H~er
(i.e., H~er(O, L) in general). Any element u of this space admits a Fourier expansion
u(x) = L uke2irrn(x/L).
nEZ
Based on its Fourier expansion, a function u belongs to the space U~er if and only if
L(l + Inl2)k lun l2 < 00.
nEZ
Since in Chapter 5 we are only interested in the function space U~er' we shall
simply denote the space H~er(O, L) by Hb and use the notation Hk for the set of
real-valued elements of U~. Note that Uk has all the properties of Sobolev spaces that we discussed above.
B.7 Coo Bump Functions
In many cases one needs to localize functions within an open ball B of their domain, i.e., change them in a smooth fashion so that they remain the same within B but vanish identically outside a larger ball. Such a localization is an important tool, e.g., in the theory of invariant manifolds.
Functions can be localized in a Coo fashion with the help of bump functions. For our purposes, a bump function will be a class-COO function
that satisfies
= 1,
E (0, 1) ,
=0,
Isl:slX, IX < lsi < j3,
lsi:::: j3,

B.8 Factorization of Functions With a Zero 399
for some 0 < a < fJ. For any C' function f:]R" ---f ]Rill, the function I (x) = f(x )b(lx I) is a C localization of f to the open ball of radius a in ]Rn that vanishes outside the ball of radius fJ. In particular, if f is of class Coo, so is j. Note that a and fJ can be selected arbitrarily close to each other, i.e., the defonnation of f into the identically zero function can be done smoothly in an arbitrarily small neighborhood ofthe a-ball. Also note that the localization technique can be extended to any map f: E ---f F between two Banach spaces E and F by letting I(x) = f(x)b(llxIIE). Again, I is as smooth inside the ball {llxllE :s fJ} as f.
It remains to show that bump functions indeed exist. We construct one such function by first introducing the Coo map
then letting
! e- l / s2 , s > 0, boCs) =
0, s :s 0,
f~oobo(r -a)bo(fJ - r)dr b(s) = 1 - ~oo'-=--------
Loo boer - a)bo(fJ - r)dr
for some 0 < a < fJ. It is straightforward to verify that b(s) is indeed a Coo bump function.
B.8 Factorization of Functions With a Zero
A function that vanishes at a given point can locally be written as a homogeneous function of the distance from that point. More precisely, let E be a Hilbert space and consider a function f: E ---f ]R such that fCxo) = O. Assume that f is of class C'. Then there exists a class Cr - I function g: E ---f ]R such that
f(x) = (g(x), x - xo) .
This follows, since we can write f as
f(x) = t !!.- f (x + (t - l)(x - Xo)) dt 10 dt
= 11 Dxf (x + (t - l)(x - Xo)' (x - xo)dt
= (1 1 DJ(x +(t -l)(x -Xo)) dt, x -xo) = (g(x), x -xo).
Note that forfunctions of a single real variable, the above expression simply gives f(x) = g(x )(x - xo). For functions of several real variables, f(xo, Yo, zo, ... ) = 0 implies that
f = gl . (x - xo) + g2 . (y - Yo) + g3 . (z - zo) + ....

References
[1] Ablowitz, MJ. and Ladik, J.F., Nonlinear differential--difference equations and Fourier analysis, J. Math. Phys. 17 (1976) 1011-1018.
[2] Ablowitz, M.1. and Herbst, B.M., On homoclinic structures and numerically induced chaos for the nonlinear SchrOdinger equation, SIAM J. Appl. Math. 50 (1990) 339-351.
[3] Ablowitz, M.1., Herbst, B.M., and Schober, C.M., Computational chaos in the nonlinear Schrodinger equation without homoclinic crossings, Physica A 228 (1996) 212-235.
[4] Abraham, R. and Marsden, J.E., Foundations of Mechanics, Benjamin-Cummings Publishing Reading, Mass (1978).
[5] Abraham, R., Marsden, J.E., and Ratiu, T., Manifolds, Tensor Analysis, and Applications (2nd. ed.), Springer-Verlag, New York (1988).
[6] Aceves, A., Holm, D.D., Kovacic, G., and Timofeyev, I., Homoclinic orbits and chaos in a second-harmonic generating optical cavity, Phys. Lett. A 233 (1997) 203-208.
[7] Alber, M.S, Luther, G.G., and Marsden J.E, Geometric phases, reduction and LiePoisson structure for the resonant three-wave interaction, Physica D 123 (1998) 271-290.
[8] Alligood, K.T., Sauer, T.D., and Yorke, J.A., CHAOS-An Introduction to Dynamical Systems, Springer-Verlag, New York (1997).
[9] Anand, G.v., Stability of nonlinear oscillations ofa stretched string, J. Acoustic. Soc. America 46 (1969) 667-677.
[10] Anderson, T.1., Balachandran, B., and Nayfeh, A.H., Observations of nonlinear interactions in a flexible, cantilever beam, AIAA paper No. 92-2332. in Proc. of the 33rd AIAA Structures, Structural Dynamics, and Materials Conference, Dallas (1992).

402 References
[11] Anosov, D.Y., Dynamical Systems IX. Dynamical Systems with Hyperbolic Behaviour. Encyclopedia of Mathematical Sciences, 66 Springer-Verlag, Berlin (1995).
[12] Arafat, H.N., Nayfeh, A.H., and Chin, C.-M., Nonlinear nonplanar dynamics of parametrically excited cantilever beams, Nonlin. Dyn. 15 (1998) 31-6l.
[13] Ariaratnam, S.T., Random vibrations of nonlinear suspensions, 1. Mech. Eng. Sci. 2 (1960) 195-20l.
[14] Ariaratnam, S.T., Stochastic stability of modes at rest in coupled nonlinear systems, in Nonlinear Stochastic and Dynamic Engineering Systems, Ziegler, F. and Schueller, G.1. (eds.), Springer-Verlag, Berlin, Heidelberg (1988) 125-133.
[15] Armbruster, J., Guckenheimer, J., and Holmes, P., Heteroclinic cycles and modulated travelling waves in systems with 0(2) symmetry, Physica D 29 (1988) 257-282.
[16] Armbruster, J., Guckenheimer, J., and Holmes, P., Kuramoto-Sivashinsky dynamics on the center-unstable manifold, SIAM 1. Appl. Math. 49 (1989) 676-691.
[17] Arnold, V.I., Small denominators and the problem of stability of motion in classical and celestial mechanics, Russ. Math. Surv. 18/6 (1963) 85-190.
[18] Arnold, v.I., Instabilities of dynamical systems with several degrees of freedom, Dokl. Akad. Nauk. SSSR 156 (1964) 9-14.
[19] Arnold, V.1. and Avez, A., Ergodic Problems o/Classical Mechanics, Benjamin, New York (1968).
[20] Arnold, V.I., Ordinary Differential Equations, MIT Press, Cambridge, MA (1973).
[21] Arnold, V.I., Mathematical Methods 0/ Classical Mechanics, Springer-Verlag, New York (1978).
[22] Arnold, V.I., Kozlov,V. V., and Neishtadt, A.I ., MathematicalAspects o/Classical and Celestial Mechanics, in Dynamical Systems III, V.1. Arnold (ed.), Springer-Verlag, New York (1988).
[23] Arnold, V.I., Mathematical problems in classical physics, in Trends and Perspectives in Applied Mathematics, L. Sirovich (ed.), Springer-Verlag, New York (1994) 1-21.
[24] Atkins, K.M. and Logan, D.E., Intersecting resonances as a route to chaos: classical and quantum studies of a three-oscillator model, Phys. Lett. A 162 (1992) 255-262.
[25] Atkins, K.M. and Logan, D.E., Intersecting resonances and chaos in a three oscillator model: I. Classical studies, 1. Chem. Phys. 97 (1992) 2438-2450.
[26] Aubrey, N., Holmes, P., Lumley, J.L., and Stone, E., The dynamics of coherent structures in the wall region of a turbulent boundary layer, 1. Fluid Mech. 192 (1988) 115-173.
[27] Aubrey, N. and Sanghi, S., Streamwise and spanwise dynamics of the turbulent wall layer, in Forum on Chaotic Flow, X. Ghia (ed.), Proc. ASME, New York (1989).
[28] Aubrey, N. and Sanghi, S., Bifurcation and bursting of streaks in the turbulent wall layer, in Turbulence 89: Organized Structures and Turbulence in Fluid Mechanics, M. Lesieur and O. Metais (eds.), Kluwer (1990).
[29] Bajaj, A.K. and Johnson, J.M., Asymptotic techniques and complex dynamics in weakly non-linear, forced mechanical systems, Int. 1. Non-Lin. Mech. 25 (1990) 211-226.

References 403
[30] Bajaj, A.K. and Johnson, J.M., On the amplitude dynamics and crisis in resonant motion of stretched strings, Phil. Trans. Roy. Soc. London, Series A-Phys. Sci. Eng. 338 (1992) 1-41.
[31] Banks, J., Brooks, J., Cairns, G., Davis, G., and Stacey, P., On Devaney's definition of chaos. Amer. Math. Monthly 99 (1992) 332-334.
[32] Bates, P., Lu, K., and Zeng, C., Invariant foliations near a normally hyperbolic invariant manifold for semiflows, preprint (1996).
[33] Bates, P.w., Lu, K., and Zeng, c., Existence and persistence of invariant manifolds for semi flows in Banach spaces, Mem. of the AMS 645 (1998) 1-129.
[34] Bates, P.w., Lu, K., and Zeng, C., Persistence of overflowing manifolds for semiflows, Comm. Pure. Appl. Math. (1999) to appear.
[35] Benettin, G. and Gallavotti, G., Stability of motions near resonances in quasiintegrable Hamiltonian systems, J. Stat. Phys. 44 (1986) 293-338.
[36] Benjamin, T.B. and Ursell, E, The stability of the plane free surface of a liquid in vertical periodic motion, Proc. R. Soc. Lond. A 225 (1954) 505-515.
[37] Benney, DJ. and Roskes, G., Wave instabilities, Studies. Appl. Math. 48 (1969) 377-385.
[38] Benzi, R., Colella, M., Briscolini, M., and Santangelo, P., A simple point vortex model for two-dimensional decaying turbulence, Phys. Fluids A 4 (1992) 1036-1039.
[39] Bessi, U., An approach to Arnold's diffusion through the calculus of variations, Nonlin. Anal. 26 (1996) 1115-1135.
[40] Bessi, U., Arnold diffusion with two resonances, J. Diff. Eqs. 137 (1997) 211-239.
[41] Bishop A.R., Forest, M.G., McLaughlin, D.W., and Overman, E.A., A modal representation of chaotic attractors for the driven, damped pendulum chain, Phys. Lett. A 144 (1990) 17-25.
[42] Bishop, A.R., Flesch, R., Forest, M.G., McLaughlin, D.W., and Overman, E.A., Correlations between chaos in a perturbed sine-Gordon equation and a truncated model system, SIAM J. Math. Anal. 21 (1990) 1511-1536.
[43] Bhizquez, M. and Thma, E., Chaos in infinite dimensions: a generalization of a theorem of Silnikov, Nonlinear Anal. 21 (1993) 103-121.
[44] Bhizquez, M. and Tuma, E., Strange attractors of the Silnikov type in Chua's circuit, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 3 (1993) 1293-1298.
[45] Bolotin, S., Homoclinic orbits to invariant tori in Hamiltonian systems, in Dynamical Systems in Classical Mechanics, v.v. Kozlov (ed.), AMS Transl. Ser. 2 168 (1995) 21-90.
[46] Bolotin, S. and McKay, R., Multibump orbits near the anti-integrable limit for Lagrangian systems, Nonlinearity 10 (1997) 1015-1029.
[47] Bolotin, S. and Negrini, P., A variational criterion for nonintegrability, Russian J. Math. Phys. 5 (1997) 415-436.
[48] Bose, A., Existence and Stability of Travelling Waves for Coupled Nerve Axon Equations, Ph.D. Thesis, Brown University (1993).
[49] Broer, H., Huitema, G.B., and Sevryuk, M.B., Quasi-periodic Motions in Families of Dynamical Systems: Order Amidst Chaos, Lect. Notes Math. 1645, Springer-Verlag, Berlin (1996).

404 References
[50] Bronstein, I.U. and Kopanskii, A.Ya., Smooth Invariant Manifolds and Normal Forms, World Scientific Publishing Co., Inc., River Edge, NJ (1994).
[51] Brown, R. and Chua, L.O., Clarifying chaos: examples and counterexamples, Internat.l. Bifur. Chaos Appl. Sci. Engrg. 6 (1996) 219-249.
[52] Brunovsky, P., Tracking invariant manifolds without differential forms, Acta Math. Univ. Comenian. 65 (1996) 23-32.
[53] Buffoni, B., Champneys, AR., and Toland, lP., Bifurcation and coalescence of a . plethora of homoclinic orbits for a Hamiltonian system, 1. Dyn. Dif.!. Eqs. 8 (1996) 221-279.
[54] Buchner, M., Marsden, J.E., and Schecter, S., Examples for the infinite-dimensional Morse lemma, SIAM 1. Math. Anal. 14 (1983) 1045-1055.
[55] Buchner, M., Marsden, lE., and Schecter, S., Applications of the blowing-up construction and algebraic geometry to bifurcation problems, 1. Dif.!. Eqns. 48 (1983) 404-433.
[56] Calini, A., Ercolani., N.M., McLaughlin, D.W., and Schober, C.M., Melnikov analysis of numerically induced chaos in the nonlinear Schrodinger equation, Physica D 89 (1996) 227-260.
[57] Camassa, R., On the geometry of an atmospheric slow manifold, Physica D 84 (1995) 357-397.
[58] Camassa, R., Kovacic, G., and Tin, S.-K., A Melnikov method for homoclinic orbits with many pulses, Arch. Rat. Mech. Anal. 143 (1998) 105-193.
[59] Campbell, S.A and Holmes, P., Heteroclinic cycles and modulated travelling waves in a system with D4 symmetry, Physica D 59 (1992) 52-78.
[60] Carr, J., Applications of Center Manifold Theory, Springer-Verlag New York, Heidelberg, Berlin (1981).
[61] Carrillo Calvet, H., The averaging method and the persistence of attractors, Appl. Anal. 29 (1988) 191-208.
[62] Cascon, A., Koiller, J., and Rezende, S.M., Bifurcations of mode equations: spin waves, Physica D 54 (1991) 98-124.
[63] Cazenave, T., An Introduction to Nonlinear Schrodinger Equations, Textos de Metodos Matematicos 26, Instituto de Matematica, Universidade Federal do Rio de Janeiro, Rio de Janeiro (1993).
[64] Champneys, AR. and Toland, J.P., Bifurcation of a plethora of muItimodal homoclinic orbits for autonomous Hamiltonian systems, Nonlinearity 6 (1992) 665-721.
[65] Chang, K.w. and Howes, P.A., Nonlinear Singular Perturbation Phenomena: Theory and Applications, Springer-Verlag, New York (1984).
[66] Chernoff, P.R. and Marsden, lE., Properties of Infinite Dimensional Hamiltonian Systems, Springer-Verlag, New York (1974).
[67] Chicone, C. and Liu, w., On the continuation of an invariant torus in a family with rapid oscillations, preprint (1998).
[68] Chierchia, L. and Gallavotti, G., Drift and diffusion in phase space, Ann. IHP. Phys. Theor. 160 (1994) 1-144.

References 405
[69] Chierchia, L., Arnold instability for nearly-integrable analytic Hamiltonian systems, in Variational and Local Methods in the Study of Hamiltonian Systems (Trieste, 1994), World Scientific Publishing Co., River Edge, NJ (1995) 17-33.
[70] Chirikov, B.Y., A universal instability of many-dimensional oscillator systems, Phys. Rep. 52 (1979) 263-379.
[71] Chow, S.-N., Hale, J., and Mallet-Paret, J., An example of bifurcation to homoclinic orbits, J. DifJ. Eqs. 37 (1980) 351-373.
[72] Chow, S.-N. and Hale, J. K., Methods of Bifurcation Theory, Springer-Verlag, New York (1982).
[73] Chow, S.-N., Lin, X.-B., and Mallet-Paret, J., Transition layers for singularly perturbed delay differential equations with monotone nonlinearities, J. Dynamics DifJ. Eqns. 1 (1989) 3-43.
[74] Chow, S.-N., Deng, B., and Fiedler, B., Homoclinic bifurcation at resonant eigenvalues, J. DifJ. Eqs. 2 (1990) 177-244.
[75] Chow, S.-N., Lin, X.-G., and Lu, K., Smooth invariant foliations in infinite dimensional spaces, J. DifJ. Eqs. 94 (1991) 266-291.
[76] Churchill, R.c., Pecelli, G., and Rod, D.L., A survey of the Henon-Heilies Hamiltonians with applications to related examples, in Stochastic Behavior in Classical and Quantum Hamiltonian Systems, Lect. Notes. in Phys. 93 Springer-Verlag, New York (1979).
[77] Churchill, R.C., Kummer, M., and Rod, D.L., On averaging, reduction and symmetry in Hamiltonian systems, J. DifJ. Eqs. 49 (1983) 359-414.
[78] Churchill, R.C., On defining chaos in the absence of time, in Deterministic Chaos in General Relativity (Kananaskis, AB, 1993), NATO Adv. Sci. Inst. Ser. B Phys. 332 Plenum, New York (1994).
[79] Ciliberto, S. and Gollub, J.P., Chaotic mode competition in parametrically forced surface waves, J. Fluid. Mech. 158 (1985) 381-398.
[80] Coddington, E.A. and Levinson, N., Theory of Ordinary Differential Equations, McGraw-Hill, New York (1955).
[81] Constantin, P., Foias C., and Temam, R., Integral Manifolds and Inertial Manifolds for Dissipative Partial Differential Equations, Springer-Verlag, New York (1988).
[82] Coullet P., Tresser, C., and Arneodo, A., Transition to stochasticity for a class of forced oscillators, Phys. Lett. A 72 (1978) 268-270.
[83] Craik, A.D.D., Wave Interactions and Fluid Flows, Cambridge Univ. Press, Cambridge (1985).
[84] Crannell, A., The role of transitivity in Devaney's definition of chaos, Amer. Math. Monthly 102 (1995) 788-797.
[85] Crawford, J.D., Knobloch, E., and Riecke, H., Period-doubling mode interactions with circular symmetry, Physica D 44 (1990) 340-396.
[86] Crespo da Silva, M.R.M. and Glynn, c.c., Nonlinear flexural-flexural-torsional dynamics of inextensional beams.!. Equations of motion, J. Strut. Mech. 6 (1978) 437-448.
[87] Cresson, J., A A-lemma for partially hyperbolic tori and the obstruction property, Lett. Math. Phys. 42 (1997) 363-377.

406 References
[88] Cruz-Pacheco, G. and Luce, B.P., On the relationship of periodic wavetrains and solitary waves of complex Ginzburg-Landau type equations, Phys. Lett. A 236 (1997) 391-402.
[89] Cruz-Pacheco, G., Levermore, C.D., and Luce, B.P., Complex Ginzburg-Landau equations as perturbations of nonlinear Schrodingerequations: A Melnikov approach, preprint (1997).
[90] Cushman, R. and Rod, D.L., The reduction of the 1 : 1 resonance, Physica D 6 (1982) 105-112.
[9 I] Cushman, R., The reduction of the 1 : 2: 2 resonance, unpublished notes (1985).
[92] Cusumano, J.P. and Moon, F.C., Chaotic non-planar vibrations of the thin elastica. 1. Experimental observation of planar instability, J. Sound Vibr. 179 (1995) 185-208.
[93] Cusumano, J.P. and Moon, F.c., Chaotic non-planar vibrations of the thin elastica. 2. Derivation and analysis of a low-dimensional model, J. Sound Vibr. 179 (1995) 209-226.
[94] Dangelmayr, G., Steady-state mode interaction in the presence of 0(2) symmetry, Dynamics and Stability of Systems 1 (1986) 159-185.
[95] Dangelmayr, G. and Armbruster, D., Steady-state mode interaction in the presence of 0(2) symmetry and in non-flux boundary conditions, Cont. Math. 56 (1986) 53-68.
[96] Dankowitz, H., Looking for chaos. An extension and alternative to Melnikov's method, Int. J. Bifur. Chaos Appl. Sci. Engrg. 6 (1996) 485-496.
[97] Dankowitz, H., Chaotic Dynamics in Hamiltonian Systems-With Applications to Celestial Mechanics, World Scientific Publishing Co., Singapore (1997).
[98] Darling, B.T. and Dennison, D.M., The water vapor molecule, Phys. Rev. 57 (1940) 128-139.
[99] Delshams, A. and Seara, T.M., An asymptotic expression for the splitting of separatrices of the rapidly forced pendulum, Comm. Math. Phys., 150 (1992) 433-463.
[100] Delshams, A and Ramirez-Ros, R., Poincare-Melnikov-Arnold method for analytic planar maps, Nonlinearity 9 (1996) 1-26.
[101] Delshams, A, Gelfreich, V., Jorba, A., and Seara, T.M., Exponentially small splitting of separatrices under fast quasiperiodic forcing, Comm. Math. Phys. 189 (1997) 35-71.
[102] Delshams, A. and Ramirez-Ros, R., Melnikov potential for exact symplectic maps, Comm. Math. Phys. 190 (1997) 213-245.
[103] Delshams, A and Gutierrez, P., Splitting potential and Melnikov theory for whiskered tori in Hamiltonian systems, submitted to J. Nonlin. Sci. (1998).
[104] Deng, B., The Silnikov problem, exponential expansion, strong A-lemma, C I
linearization, and homoclinic bifurcation, J. Diff. Eqs. 79 (1989) 189-231.
[105] Deng, B., On Silnikov's homoclinic-saddle-focus theorem, J. Diff. Eqs. 102 (1993) 305-329.
[106] Devaney, R., Transversal homoclinic orbits in an integrable system, Amer. J. Math. 100 (1978) 631-642.
[107] Devaney, R. L., An Introduction to Chaotic Dynamical Systems (2nd ed.), AddisonWesley, Redwood City, CA (1989).

References 407
[108] Doelman, A. and Rottschiifer, v., Singularly perturbed and non local modulation equations for systems with interacting instability mechanisms, 1. Nonlin. Sci. 7 (1997) 371-409.
[109] Duistermaat, J.J., Nonintegrability of the 1: 1: 2 resonance, Ergod. Th., and Dynam. Sys. 4 (1984) 553-568.
[110] Dumortier, F. and Roussarie, R., Canard cycles and center manifolds, Memoirs of the AMS 557 (1996).
[111] Easton, R., Orbit structure neartrajectories biasymptotic to invariant tori, in Classical Mechanics and Dynamical Systems, L. Devaney and Z. H. Nitecki (eds.), Marcel Dekker Publishing (1981) 55-67.
[112] Eliasson, L.H., Biasymptotic solutions of perturbed integrable Hamiltonian systems, Bo!. Soc. Brasil. Math. 25 (1994) 56-76.
[113] Ellison, l.A., Kummer, M., and Saenz, A.W., Transcendentally small transversality in the rapidly forced pendulum, J. Dyn. Diff. Eqs. 5 (1993) 241-247.
[114] Ercolani, N.M., Forest, M.G., and McLaughlin, D.W., Geometry of the modulational instability, Part III: Homoclinic Orbits for the periodic sine-Gordon equation, Physica D 43 (1990) 349-384.
[115] Ercolani, N.M. and McLaughlin, D.W., Towards a topological classification ofintegrable PDE's, in The Geometry of Hamiltonian Systems, Springer-Verlag, New York (1991).
[116] Evans, l., Fenichel, N., and Feroe, A., Double impulse solutions in nerve axon equations, SIAM J. Appl. Math. 42 (1982) 219-234.
[117] Ezra, S. G., Interaction between bending vibrations and molecular rotation: a model study, Chern. Phys. Lett. 127 (1986) 492-500.
[118] Faraday, M., On a peculiar class of acoustical figures, and on certain forms assumed by groups of particles upon vibrating elastic surfaces, Phil. Trans. R. Soc. Lond. 121 (1883) 299-340.
[119] Feng, z.e. and Sethna, P.R., Symmetry-breaking bifurcations in resonant surface waves, J. Fluid Mech. 199 (1989) 495-518.
[120] Feng, Z.C. and Sethna, P.R., Global bifurcation and chaos in parametrically forced systems with one-one resonance, Dynamics and Stability of Systems 5 (1990) 201-225.
[121] Feng, z.e. and Sethna, P.R., Global bifurcations in the motion of parametrically excited thin plates, Nonlin. Dyn. 4 (1993) 389-408.
[122] Feng, Z.C. and Wiggins, S., On the existence of chaos in a class of two-degree-offreedom, damped, strongly parametrically forced mechanical systems with broken 0(2) symmetry, Z4.MP 44 (1993) 201-248.
[123] Feng, Z.e. and Leal, L.G., Symmetries of the amplitude equations of an in extensional beam with internal resonance, J. Appl. Mech. 62 (1995) 235-238.
[124] Feng, z.e. and Wiggins, S., Fluid particle dynamics and Stokes drift in gravity and capillary waves generated by the Faraday instability, Nonlin. Dyn. 8 (1995) 141-160.
[125] Feng, Z.e., Nonresonant modal interactions, DE- Vol. 84-1, 1995 Design Engineering Technical Conferences 3, Part A (1995) 511-517.
[126] Fenichel, N., Persistence and smoothness of invariant manifolds for flows, Ind. Univ. Math. J. 21 (1971) 193-225.

408 References
[127] Fenichel, N., Asymptotic stability with rate conditions, Ind. Univ. Math. J. 23 (1974) 1109-1137.
[128] Fenichel, N., Asymptotic stability with rate conditions II, Ind. Univ. Math. J. 26 (1977) 81-93.
[129] Fenichel, N., Geometric singular perturbation theory for ordinary differential equations, J. Diff. Eqs. 31 (1979) 53-98.
[130] Ford, 1. and Waters, J., Computer studies of energy sharing and ergodicity for nonlinear oscillator systems, J. Math. Phys. 4 (1963) 1293-1306.
[131] Ford, J. and Lunsford, G.H., Stochastic behavior of resonant nearly linear oscillator systems in the limit of zero nonlinear coupling, Phys. Rev. A 1 (1970) 59-70.
[132] Forest, M.G., Goedde, G.G., and Sinha, A., Chaotic transport and integrable instabilities in a near-integrable, many-particle, Hamiltonian lattice, Physica D 67 (1993) 347-386.
[133] Fulton, T.A., Aspects of vortices in long Josephson junctions, Bull. Amer. Phys. Soc. 17 (1972) 46-49.
[134] Funakoshi, M. and laune, S., Surface waves due to resonant horizontal oscillations, 1. Fluid. Mech. 192 (1988) 219-247.
[135] Gaidukov, E. V., Asymptotic geodesics on a Riemannian manifold nonhomeomorphic to the sphere, Soviet Math. Dokl. 7 (1966) 1033-1035.
[136] Gallavotti, G., Twistless KAM tori, quasi flat homoclinic intersections, and other cancellations in the perturbation series of certain completely integrable Hamiltonian systems, Rev. Math. Phys. 6 (1994) 343-411.
[137] Gelfreich, V.G., Melnikov method and exponentially small splitting of separatrices, Physica D 101 (1997) 227-248.
[138] Gentile, G., A proof of existence of whiskered tori with quasi flat homoclinic intersections in a class of almost integrable Hamiltonian systems, Forum. Math. 7 (1995) 709-753.
[139] GiorgilIi, A., Delshams, A., Fontich, E., Galgani, L., and Sima, C., Effective stability for a Hamiltonian system near an elliptic equilibrium point, with an application to the restricted three-body problem, J. Diff. Eqns. 77 (1989) 167-198.
[140] Glendinning, P. and Sparrow, c., Local and global behavior near homoclinic orbits, J. Stat. Phys. 35 (1984) 645-696.
[141] GoIlub, 1. and Meyer, c.w., Symmetry-breaking instabilities on a fluid surface, Physica D 6 (1983) 337-346.
[142] Graff, S.M., On the conservation of hyperbolic invariant tori for Hamiltonian systems, J. Diff. Eqs. 15 (1974) 1-69.
[143] Gruendler, 1., The existence of homoclinic orbits and the method of Melnikov for systems in JR.n, SIAM J. Math.Anal. 16 (1985) 907-931.
[144] Gu, X.M. and Sethna, P.R., Resonant surface waves and chaotic phenomena, J. Fluid. Mech. 183 (1987) 543-565.
[145] Guckenheimer, J. and Holmes, PJ., Nonlinear Oscillations, Dynamical Systems, and Bifurcations o/Vector Fields, Springer-Verlag, New York, Heidelberg, Berlin (1983).
[146] Guckenheimer, J. and Mahalov, A., Resonant triad interactions in symmetric systems, Physica D 54 (1992) 267-310.
References 409
[147] Gui, c.P., Multi-bump solutions for nonlinear SchrOdinger equations, Cr. Acad. Sci. I-Math. 322 (1996) 133-138.
[148] Guillemin, V. and Pollack, A., Differential Topology, Prentice-Hall, Inc., New Jersey (1974).
[149] Hale, J., Ordinary Differential Equations, Robert E. Krieger Publishing. Co., Malabar, Florida (1980).
[150] Hale, J.K. and Lin, X.-B., Symbolic dynamics and nonlinear semiflows, Ann. Mat. Pura Appl. 144 (1986) 229-259.
[151] Haller, G. and Wiggins, S., Orbits homoclinic to resonances: the Hamiltonian case, Physica D 66 (1993) 298-346.
[152] Haller, G. and Wiggins, S., N-pulse homoc1inic orbits in perturbations of resonant Hamiltonian systems, Arch. Rat. Mech. Anal. 130 (1995) 25-101.
[153] Haller, G. and Wiggins, S., Multi-pulse jumping orbits and homoclinic trees in a modal truncation of the damped-forced nonlinear SchrOdinger equation, Physica D 85 (1995) 311-347.
[154] Haller, G., Diffusion near intersecting resonances in Hamiltonian systems, Phys. Lett. A 200 (1995) 34-42.
[155] Haller, G. and Wiggins, S., Geometry and chaos near resonant equilibria of 3-DOF Hamiltonian systems, Physica D 90 (1996) 319-365.
[156] Haller, G., Universal homoclinic bifurcations and chaos near double resonances, J. Stat. Phys. (1997) 101l-1O5l.
[157] Haller, G., Multi-dimensional homoc1inic jumping and the discretized NLS equation, Comm. Math. Phys. 193 (1998) 1-46.
[158] Haller, G., Homoc1inic jumping in the perturbed, nonlinear Schrodinger equation, Comm. Pure Appl. Math. 52 (1999) 1-47.
[159] Haller, G., Menon, G., and Rothos, v., Silnikov manifolds in coupled nonlinear Schrodinger equations, preprint (1998).
[160] Hastings, S.P., Single and multiple pulse waves for the FitzHugh-N agumo equations, SIAM J. Appl. Math. 42 (1982) 247-260.
[161] Hennig, D. and Gabriel, H., Designing localized multi pulse solutions of the discrete nonlinear SchrOdinger equation with an external potential, Phys. Rev. E 57 (1998) 2371-2376.
[162] Herbst, B.M. and Ablowitz, M.J., Melnikov analysis and numerically induced chaos, in Chaos in Australia (Sydney, 1990), World. Sci. Publishing Co., River Edge, NJ (1993).
[163] Hirsch, M.W., Pugh, C.C., and Shub, M., Invariant Manifolds, Lect. Notes Math. 583, Springer-Verlag, New York (1977).
[164] Hirst, D.M., Potential Energy Surfaces, Taylor and Francis, London (1985).
[165] Holm, D.O. and Kovacic, G., Homoclinic chaos in a laser-matter system, Physica D 56 (1992) 270-300.
[166] Holmes, P., A nonlinear oscillator with a strange attractor, Phil. Trans. Roy. Soc. A. 292 (I979) 419-448.
[167] Holmes, P., A strange family of three-dimensional vector fields near a degenerate singularity, J. Dijf. Eqns. 37 (1980) 382-404.

410 References
[168] Holmes, P. and Marsden, 1., A partial differential equation with infinitely many periodic orbits: chaotic oscillations of a forced beam, Arch. Rat. Mech. Anal. 76 (1981) 135-166.
[169] Holmes, P., Space- and time-periodic perturbations of the sine-Gordon equation, in Dynamical Systems and Turbulence, D. A. Rand and L. S. Young (eds.) 164-191. Lect. Notes in Math. 898, Springer-Verlag, New York, Heidelberg, Berlin (1981).
[170] Holmes, P. and Marsden, 1., Horseshoes in perturbations of Hamiltonian systems with two degrees of freedom, Comm. Math. Phys. 82 (1982) 523-544.
[171] Holmes, P. and Marsden, J., Melnikov's method and Arnold diffusion for perturbations of integrable Hamiltonian systems, J. Math. Phys. 23 (1982) 669-675.
[172] Holmes, P., Chaotic motion in a weakly nonlinear model for surface waves, 1. Fluid. Mech. 162 (1986) 365-388.
[173] Holmes, P., Marsden, J., and Scheurle, 1., Exponentially small splittings of separatrices with application to KAM theory and degenerate bifurcations, Contemp. Math. 81 (1988) 213-244.
[174] Holmes, P., Lumley, 1.L., and Berkooz, G., Turbulence, Coherent Structures, Dynamical Systems and Symmetry, Cambridge University Press, Cambridge (1996).
[175] Hoveijn, I. and Verhulst, F., Chaos in the I : 2: 3 Hamiltonian normal form, Physica D 44 (1990) 397-406.
[176] Hoveijn, I., Aspects of Resonance in Dynamical Systems, Ph.D. thesis, Universiteit Utrecht (1992).
[177] Hu,Y. and Ruan, 1., A nv . .': on Devaney's definition of chaos, J. Fudan Univ. Natur. Sci. 34 (1995) 127-131.
f178] Hutchinson, 1.S., Reinhardt, WP., and Hynes, J.T., Nonlinear resonances and vibrational energy flow in model hydrocarbon chains, J. Chem. Phys. 79 (1983) 4247-4259.
[179] II' ichev, A., Faraday resonance: Asymptotic theory of surface waves, Physica D 119 (1998) 327-351.
[180] looss, G., Global characterization of the normal form of a vector field near a closed orbit, J. Diff. Eqns. 76 (1988) 47-76.
[181] Johnson, 1.M. and Bajaj, A.K., Amplitude modulated and chaotic dynamics in resonant motion of strings, J. Sound Vibr. 128 (1989) 87-107.
[182] Jones, C. and Proctor, M., Strong spatial resonance and travelling waves in Benard convection, Phys. Lett. A 121 (1987) 224-227.
[183] Jones, C.K.R.T. and Kopell, N., Tracking invariant manifolds with differential forms in singularly perturbed systems, J. Diff. Eq. 108 (1994) 64-88.
[184] Jones, C.K.R.T., Geometric singular perturbation theory, in Dynamical Systems Montecatini, Terme 1994, Lect. Notes Math. 1609, Springer-Verlag, New York (1994).
[185] Jones, c.K.R.T., Kaper, T.J., and Kopell, N., Tracking invariant manifolds up to exponentially small errors, SIAM J. Math. Anal. 27 (1996) 558-577.
[186] Kambe, T. and Umeki, M., Nonlinear dynamics of two-mode interactions in parametric excitation of surface waves, 1. Fluid. Mech. (1990) 373-393.
[187] Kaper, T.J. and Wiggins, S., Lobe area in adiabatic Hamiltonian systems, Physica D Sl (1991) 205-212.

References 41 1
[188] Kaper, TJ. and Kovacic, G., Multi-bump orbits homoclinic to resonance bands, Trans. AMS 348 (1996) 3835-3887.
[189] Kaper, TJ. and Soto-Trevino, C., Higher-order Me1nikov theory for adiabatic systems, J. Math. Phys. 37 (1996) 6220-6249.
[190] Kellman, M.E., Approximate constants of motion for vibrational spectra of manyoscillatory systems with multiple anharmonic resonances, J. Chern. Phys. 93 (1990) 6630-6635.
[191] Keolian, R., Turkevich, L.A., Putterman, SJ., Rudnick, SJ., and Rudnick, I., Subharmonic sequences in the Faraday experiment: departure from period doubling, Phys. Rev. Lett. 47 (1981) 1133-1136.
[192] Keolian, R. and Rudnick, I., The role of phase locking in quasi-periodic surface waves on liquid helium and water, in Proc. Int. Sch. Phys. Frontiers in Physical Acoustics, D. Sette (ed.), North Holland (1984).
[193] Keshavamurthy, S. and Ezra, G., Eigenstate assignments and quantum-classical correspondence for highly-excited vibrational states of the Baggot H20 Hamiltonian, J. Chern. Phys. 107 (1997) 156-179.
[194] Kirby, M., Boris, J.P., and Sirovich, L., Proper orthogonal decomposition of a simulated supersonic shearlayer, Int. J. Num. Math. Fluids 10 (1990) 411-428.
[195] Kirchgraber, U., On the existence and geometry of invariant tori in the method of averaging, Z. Angew. Math. Phys. 38 (1987) 213-225
[196] Kirchgraber, U. and Stoffer, D., On the definition of chaos, Z. Angew. Math. Mech. 69 (1989) 175-185.
[197] Kirchgraber, U. and Palmer, K. J., Geometry in the Neighborhood of Invariant Manifolds of Maps and Flows and Linearization, Pitman Res. Notes. Math. 233, Longman Scientific and Technical, Harlow (1990).
[198] Kirk, v., Marsden, J.E., and Silber, M., Branches of stable three-tori using Hamiltonian methods in Hopf bifurcation on a rhombic lattice, Dyn., and Stab .. of Systems 11 (1996) 267-302.
[199] Kisaka, M., Kokubu, H., and Oka, H., Bifurcations to N-homoclinic orbits and Nperiodic orbits in vector fields, J. Diff. Eqs. 5 (1993) 305-357.
[200] Kline, SJ., Reynolds, W. C, Schraub, F. A., and Rundstadler, P. w., The structure of turbulent boundary layers, J. Fluid Mech. 30 (1967) 741-773.
[201] Knobloch, E., Mahalov, A., and Marsden, J.E., Normal forms for three dimensional parametric instabilities in ideal hydrodynamics, Physica D 73 (1994) 49-81.
[202] Knudsen, C, Chaos without nonperiodicity, Amer. Math. Monthly 101 (1994) 563-565.
[203] Kollmann, M. and Bountis, T., A Melnikov approach to soliton-like solutions of systems of discretized nonlinear SchrOdinger equations, Physica D 113 (1998) 397-406.
[204] Kopel!, N. and Washburn, R.B., Chaotic motions in the two-degree-of-freedom swing equations, IEEE Trans. Circuits. Sys. (1982) 738-746.
[205] Kopel!, N., Invariant manifolds and the initialization problem for some atmospheric equations, Physica D 14 (1985) 203-215.

412 References
[206] KovaCic, G. and Wiggins, S., Orbits homoclinic to resonances, with an application to chaos in the damped and forced sine-Gordon equation, Physica D 57 (1992) 185-225.
[207] KovaCic, G., Hamiltonian dynamics of orbits homoclinic to a resonance band, Phys. Lett. A 167 (1992) 137-142.
[208] Kovacic, G., Singular perturbation theory for homoclinic orbits in a class of nearintegrable Hamiltonian systems, 1. Dyn. DijJ. Eqns. 5 (1993) 559-597.
[209] Kovacic, G., Singular perturbation theory for homoclinic orbits in a class of nearintegrable dissipative systems, SIAM 1. Math. Anal. 26 (1995) 1611-1643.
[210] KovaCic, G. and Wettergren, T.A., Homoclinic orbits in the dynamics of resonantly driven coupled pendula, ZAMP 47 (1996) 221-264.
[211] Kozlov, v.v., Symmetries. Topology and Resonances in Hamiltonian Mechanics, Springer-Verlag, Berlin (1996).
[212] Krupa, M., Sandstede, B., and Szmolyan, P., Fast and slow waves in the FitzHughNagumo equation, 1. DijJ. Eqns. 133 (1997) 49-97.
[213] Krupa. M., Robust heteroclinic cycles, 1. Nonlin. Sci. 7 (1997) 129-176.
[214] Krupa, M. and Szmolyan. P., Geometric analysis of the singularly perturbed planar fold, to appear in Multiple Time-Scale Dynamical Systems. IMA proceedings (1998).
[215] Krylov, N.M. and Bogoliubov, N.N., New Methods of Nonlinear Mechanics in their Application to the Investigation of the Operation of Electronic Generators. I .• United Scientific and Technical Press, Moscow (1934).
[216] Kuksin, S.B., Nearly Integrable Infinite-Dimensional Hamiltonian Systems. Lect. Notes in Math. 1556, Springer-Verlag, Berlin (1993).
[217] Kummer, M., An interaction of three resonant modes in a nonlinear lattice. 1. Math. Anal. andApps. 52 (1975) 64-104.
[218] Kummer, M .• On resonant classical Hamiltonians with two degrees of freedom near an equilibrium point, in Stochastic Behavior in Classical and Quantum Hamiltonian Systems. Lect. Notes in Phys. 93 Springer-Verlag, New York (1979).
[219] Kummer, M., On resonant Hamiltonian systems with finitely many degrees of freedom, in Local and Global Methods of Nonlinear [)ynamics. Lect. Notes in Phys. 252. Springer-Verlag, New York (1986).
[220] Kummer, M., On resonant classical Hamiltonians with n frequencies. 1. DijJ. Eqs. 83 (1990) 220-243.
[221] Kuzrtetsov, Y.A.. Elements of Applied Bifurcation Theory, Springer-Verlag, New York (1995).
[222] Kuznetsov, Y.A., Muratori, S., and Rinaldi, S., Homoclinic bifurcations in slow-fast second order systems. Nonlinear Anal. 25 (1995) 747-762.
[223] Lang, S., Differential Manifolds, Addison-Wesley .Publishing. Co., Reading, Mass. (1972)
[224] Lang. S .• Real and Functional Analysis (3rd ed.), Springer-Verlag. New York (1993).
[225] Laskar, J., Global dynamics and diffusion. Physica D 67 (1993) 257-281.
[226] Lerman, L. and Umanskii, Ya .• On the existence of separatrix loops in fourdimensional systems similar to the integrable Hamiltonian systems, Appl. Math. Mech. 47 (1984) 335-340.
References 413
[227] Li, Y, Backlund transformations and homoclinic structures for the integrable discretization of the NLS equation, Phys. Lett. A 163 (1992) 181-187.
[228] Li, Y., Chaotic Dynamics in Partial Differential Equations, Ph.D. thesis, Princeton University (1993).
[229] Li, Y and McLaughlin, D.W., Morse and Melnikov functions for NLS PDEs, Comm. Math. Phys. 162 (1994) 175-214.
[230] Li, Y, McLaughlin, D.W., Shatah, J., and Wiggins, S., Persistent homoclinic orbits for a perturbed, nonlinear SchrOdinger equation, Comm. Pure Appl. Math. 49 (1996) 1175-1255.
[231] Li, Y and McLaughlin, D.W., Homoclinic orbit and chaos in discretized NLS systems, Part I: Homoclinic orbits, 1. Nonlin. Sci. 7 (1997) 211-269.
[232] Li, Y. and Wiggins, S., Homoclinic orbit and chaos is discretized NLS systems, Part II: Symbolic dynamics, 1. Nonlin. Sci. 7 (1997) 315-370.
[233] Li, Y and Wiggins, S., Invariant Manifolds and Fibrationsfor Perturbed Nonlinear Schrodinger Equations, Springer-Verlag, New York (1997).
[234] Li, Y., Smale horseshoes and symbolic dynamics in perturbed nonlinear Schrodinger equations, preprint (1997).
[235] Li, Y., Homoclinic tubes in the discrete nonlinear SchrOdinger equation under Hamiltonian perturbations, preprint (1998).
[236] Lichtenberg, AJ. and Lieberman, M.A, Regular and Chaotic Dynamics, (2nd ed.), Springer, New York (1992).
[237] Lim, c.e., A combinatorial perturbation method and Arnold's whiskered tori in vortex dynamics, Physica D 64 (1993)163-194.
[238] Lin, X.-B., Shadowing Lemma and singularly perturbed boundary value problems, SIAM 1. Appl. Math. 49 (1989) 26-54.
[239] Lin, X.-B., Homoclinic bifurcations with weakly expanding center modes, Dynamics Reported 5 (1995) 99-189.
[240] Lions, J.L. and Magenes, E., Nonhomogeneous Boundary Value Problems and Applications, Springer-Verlag, New York (1972).
[241] Litvak-Hinenzon, A and Rom-Kedar, v., Symmetry-breaking perturbations and strange attractors, Phys. Rev. E 55 (1997) 4964-4978.
[242] Lochak, P. and Meunier, C., Multiphase Averagingfor Classical Systems, SpringerVerlag, New York (1988).
[243] Lochak, P., Effective speed of Arnold's diffusion and small denominators, Phys. Lett. A 143 (1990) 39-42.
[244] Lochak, P., Arnold diffusion: a compendium of remarks and questions, to appear in Hamiltonian Systems with Three or More Degrees of Freedom, (s'Agaro, 1995).
[245] Lomeli, H.E., Applications of the Melnikov method to twist maps in higher dimensions using the variational approach, Ergodic Theory Dynam. Sys. 17 (1997) 445-462.
[246] Lorenz, E.N., Deterministic nonperiodic flow, 1. Atmos. Sci. 20 (1963) I 30-141.
[247] Lu, Z.-M. and Kellman, M.E., Phase space structure for triatomic molecules, 1. Chern. Phys. 107 (1997) 1-15.

414 References
[248] Lumley, J.L., The structure of inhomogeneous turbulent flows, in Atmospheric Turbulence and Radio Wave Propagation, A. M. Yaglom and V. I Tatarsky (eds.), Nauka, Moscow (1967).
[249] Lumley, J.L., Stochastic Tools in Turbulence, Academic (1970).
[250] Malhotra, N. and Namachchivaya, N.S., Global bifurcations in externally excited two-degree-of-freedom nonlinear systems, Nonlin. Dyn. 8 (1995) 85-109.
[251] Malhotra, N. and Namachchivaya, N.S., Nonlinear oscillations of spinning discs: Problem formulation, local bifurcations, and the existence of global dynamics, Technical Report AAE 9704, UILU ENG 97-0504, University of Illinois at Urbana-Champaign (1997).
[252] Mafie, R., Persistent manifolds are normally hyperbolic, Trans. Amer. Math. Soc. 246 (1978) 261-283.
[253] Marco, P., Transition de long des chaines de tores invariants pour les systemes Hamiltonians Analytiques (in French), Ann. de la Inst. H. Poincare Phys. Th. 64 (1996) 205-252.
[254] Marsden, J.E., Applications oj Global Analysis in Mathematical Physics, Publish or Perish Inc., Berkeley (1974).
[255] Marsden, J.E. and McCracken, M., The Hopj Bifurcation and Its Applications, Springer-Verlag, New York (1976).
[256] Marsden, J.E., Lectures on Mechanics, London. Math. Society Lect. Notes 174, Cambridge University Press, Cambridge (1992).
[257] Martens, c.c. and Ezra, G.S., Classical and semiclassical mechanics of strongly resonant systems: A Fourier transform approach, J. Chem. Phys. 86 (1987) 279-307.
[258] Martens, c.c. and Ezra, G.S., Classical, quantum mechanical, and semiclassical representations of resonant dynamics: A unified treatment, J. Chem. Phys. 87 (1987) 284-302.
[259] Martinet, L., Magnenat, P., and Verhulst, F., On the number of isolating integrals in resonant systems with three degrees of freedom, Celest. Mech. 29 (1981) 93-99.
[260] Mather, J., Variational construction of connecting orbits, Ann. Inst. Fourier 43 (1993) 1349-1386.
[261] McLaughlin, D.W. and Schober, C.M., Chaotic and homoclinic behavior for numerical discretizations of the nonlinear SchrOdinger equation, Physica D 57 (1992) 447-465.
[262] McLaughlin, D.W., Overman, E.A. ,II. , Wiggins S., and Xiong, c., Homoclinic orbits in a four dimensional model of a perturbed NLS equation: a geometric singular perturbation study, in Dynamics Reported 5, Springer-Verlag, Berlin (1993).
[263] McLaughlin, D.W. and Overman, E.A., II, Whiskered tori for integrable PDEs: chaotic behavior in near integrable pde's, Surveys Appl. Math. 1 (1995) 83-203.
[264] McLaughlin, D.W. and Shatah, J., Melnikov Analysis for PDE's, in Lectures in Applied Math. 36, AMS, Providence (1996).
[265] McLaughlin, D.W. and Shatah, J., Homoclinic orbits for PDE's, preprint (1997).
[266] McNeil, KJ., Drummond, P.D., and Walls, D.P., Self pulsing in second harmonic generation, Opt. Comm. 27 (1978) 292-294.
[267] Melnikov, V.K., On the stability of the center for time periodic perturbations, Trans. Moscow. Math. Soc. 12 (1963) I-57.

References 415
[268] Menyuk, c., Stability of solitons in birefringent optical fibers, I. Equal propagation amplitudes, Opt. Lett. 12 (1987) 614-616.
[269] Meron, E. and Proccacia, I., Low-dimensional chaos in surface waves: Theoretical analysis of an experiment, Phys. Rev. A 34 (1986) 3221-3237.
[270] Meyer, K.R. and Sell, G.R., Melnikov transforms, Bernoulli bundles, and almost periodic perturbations, Trans. Amer. Math. Soc. 314 (1989) 63-105.
[271] Meyer, K.R. and Hall, G.H., Introduction to Hamiltonian Dynamical Systems and the N-body Problem, Springer-Verlag, New York (1992).
[272] Mielke, A., Hamiltonian and Lagrangian Flows on Center Manifolds, Lect. Notes. in Math. 1489, Springer-Verlag, New York (1991).
[273] Mielke, A., Holmes, PJ., and O'Reilly, O.M., Cascades of homo clinic orbits to, and chaos near, a Hamiltonian saddle-center, J. Dyn. Diff. Eqns. 4 (1992) 95-126.
[274] Miles,J., Nonlinear surface wave in closed basins,J. Fluid. Mech. 75 (1976) 419-448.
[275] Miles, J.W., Nonlinear Faraday resonance, J. Fluid. Mech. 146 (1984) 285-302.
[276] Miles, J.w., Internally resonant surface waves in a circular cylinder, J. Fluid. Mech. 149 (1984) 1-14.
[277] Miles, lW., Resonantly forced gravity waves in a circular cylinder, J. Fluid. Mech. 149 (1984) 15-31.
[278] Miles, J.w., Resonant, nonplanar motion of a stretched string, J. Acoustic. Soc. America 75 (1984) 1505-1510.
[279] Miles, J.w., Resonant motion of a spherical pendulum, Physica D 11 (1984) 309-323.
[280] Milnor, lW., Morse Theory, Princeton University Press, Princeton, NJ (1969).
[281] Mirkina, A.S., Coupled vibrations of mechanical systems under random actions, Mech. Solids 9 (1974) 56-61.
[282] Moin, P. and Moser, R.D., Characteristic eddy decomposition of turbulence in a channel, J. Fluid. Mech. 200 (1989) 471-509.
[283] Montaldi, J., Roberts, M., and Stewart, I., Existence of nonlinear normal modes of symmetric Hamiltonian systems, Nonlinearity 3 (1990) 695-730.
[284] Montaldi, J., Roberts, M., and Stewart, I., Stability of nonlinear normal modes of symmetric Hamiltonian systems, Nonlinearity 3 (1990) 731-772.
[285] Moser, l, Convergent series expansions for quasi-periodic motions, Math. Ann. 169 (1967) 136-176.
[286] Moser, J., Stable and Random Motions in Dynamical Systems, Princeton University Press, Princeton (1973).
[287] Muraki, DJ. and Kath, w.L., Hamiltonian dynamics of solitons in optical fibers, Physica D 48 (1991) 53-64.
[288] Murdock, J., Qualitative theory of nonlinear resonance by averaging and dynamical systems methods, Dynamics Reported, Vol. 1, Teubner, Stuttgart (1988) 91-172.
[289] Murrell, J.N., Carter, S., Farantos, S.c., Huxley, P., and Varandas, A.J.C., Molecular Potential Energy Functions, John Wiley & Sons Ltd. (1984).
[290] Natsiavas, S., External primary resonance of self-excited oscillators with 1 : 3 internal resonance, J. Sound Vibr. 208 (1997) 211-224.
[291] Natsiavas, S. and Theodossiades, S., Regular and chaotic forced vibration of thin rotating strings, Int. J. Non-Lin. Mech. 33 (1998) 843-855.

416 References
[292] Nayfeh, A.H. and Mook, D.T., Nonlinear Oscillations, Wiley-Interscience, New York (1979).
[293] Nayfeh, A.H. and Pai, P.E, Non-linear, non-planar parametric responses of an inextensional beam, Int. J. Non-Lin. Mech. 24 (1989) 139-158.
[294] Nayfeh, S.A. and Nayfeh, A.H., Nonlinear interactions between two widely spaced modes - external excitation, Int. J. Blf. Chaos 3 (1993) 417-427.
[295] Nayfeh, S.A. and Nayfeh, A.H., Energy transfer from high- to low-frequency modes in a flexible structure via modulation, J. Vibr. Acoust. 116 (1994) 203-207.
[296] Nayfeh, A.H. and Chin., C.-M., Nonlinear interactions in a parametrically excited system with widely spaced frequencies, Nonlin. Dyn. 7 (1995) 195-216.
[297] N ayfeh, A. H. and Mook, D. T., Energy transfer from high-frequency to low-frequency modes in structures, Trans. ASME 186 (1995) 186-195.
[298] Neishtadt, A.I., The separation of motions in systems with a rapidly rotating phase, PM.M. U.S.S.R. 48 (1984) 133-139.
[299] Nekhorosev, N.N., An exponential estimate on the time of stability of nearlyintegrable Hamiltonian systems, Russ. Math. Surv. 32 (1977) 1-65.
[300] Newell, A.C. and Moloney, 1.v., Nonlinear Optics, Addison-Wesley Publishing Co. (1992).
[301] O'Reilly, O.M. and Holmes, PJ., Non-linear, non-planar and non-periodic vibrations of a string, J. Sound Vibr. 153 (1992) 413-435, with an Errata in 159 (1992) 571.
[302] O'Reilly. O.M., Global bifurcations in the forced vibration of a damped string, Int. J. Non-Lin. Mech. 28 (1993) 337-351.
[303] Paldor, N. and Killworth, PD .. Inertial trajectories on a rotating Earth, 1. Atm. Sci. 45 (1988) 4013-4019.
[304] Paldor, N. and Boss, E., Chaotic tr~ectories of tidally perturbed inertial oscillations, 1. Atm. Sci. 49 (1992) 2306-2318.
[305] Palis, N., On Morse-Smale dynamical systems, Topology 8 (1969) 385-405.
[306] Palis,1. and DeMelo, w., Geometric Theory of Dynamical Systems: An Introduction. Springer-Verlag, New York, Heidelberg, Berlin (1982).
[307] Palis, 1., A note on the inclination lemma (A-lemma) and Feigenbaum's rate of approach, in Geometric dynamics (Rio de Janeiro, 1981), Lect. Notes in Math. 1007 Springer-Verlag, Berlin-New York (1983).
[308] Palis, 1. and Takens, E, Hyperbolicity and Sensitive Chaotic Dynamics at Homoclinic Bifurcations, Cambridge University Press, Cambridge (1993).
[309] Palmer, K.1., Exponential dichotomies and homoclinic points, 1. Diff. Eqs. 55 (1985) 225-256.
[310] Pawlik, M. and Rowlands, G., The propagation of solitary waves in piezoelectric semiconductors, J. Phys. C8 (1975) 1189-1204.
[311] Poincare, H., Les Methodes Nouvelles de la Mecanique Celeste, III, Paris (J 899).
[3 I 2] Poschel, 1., Uber invariante Tori in differenzierbaren Hamiltonischen Systemen. Bonn. Math. Schr. 120, Universitat Bonn, Mathematisches Institut, Bonn (1980).
[313] Poschel, 1., On elliptic lower dimensional tori in Hamiltonian systems, Math. Zeitschr. 202 (1989) 559-608.

References 417
[314] Poschel, 1., A KAM-theorem for some nonlinear partial differential equations, Ann. Scuola Norm. Sup. Pisa Cl. Sci. 23 (1996) 119-148.
[315] Proctor, M.K. and Jones, C., The interaction of two spatially resonant patterns in thermal convection. Part 1. Exact 1 : 2 resonance, J. Fluid Mech. 188 (1988) 301-335.
[316] Rabinowitz, P., Heteroclinics for a Hamiltonian system of double-pendulum type, Topol. Methods. Nonlin. Anal. 9 (1997) 41-76.
[317] Rayleigh, Lord, On the crispations of fluid resting on a vibrating support, Phil. Mag. 16 (1883) 50-58 (Scientific Papers, Vol. 2, 212-219.)
[318] Robinson, C, Horseshoes for autonomous Hamiltonian systems using the Melnikov integral, Ergod. Th., and Dynam. Sys. 8 (1988) 395-409.
[319] Rom-Kedar, v., Secondary homoclinic bifurcation theorems, CHAOS 5 (1994) 385-401.
[320] Rom-Kedar, V., Parabolic resonances and instabilities, CHAOS 7 (1997) 148-158.
[321] Rom-Kedar, v., Dvorkin, Y., and Paldor, N., Chaotic Hamiltonian dynamics of a particles's horizontal motion in the atmosphere, Physica D 106 (1997) 389-431.
[322] Rom-Kedar, V. and Paldor, N., From the tropics to the poles in forty days, Bull. Amer. Mete. Soc. 78 (1997) 2779-2784.
[323] Rothos, V.M. and Bountis, T.C, The dynamics of coupled perturbed discretized NLS equations, Physica D 113 (1998) 326-330.
[324] Rudnev, M. and Wiggins, S., Existence of exponentially small separatrix splittings and homoclinic connections between whiskered tori in weakly hyperbolic, nearintegrable Hamiltonian systems, Physica D 114 (1998) 3-80.
[325] Sahm, D.K. and Uzer, T., Intramolecular vibrational energy flow induced by potential and Coriolis coupling, J. Chem. Phys. 90 (1989) 3159-3170.
[326] Salam, F.M.A., Marsden, J., and Varaiya, P.P., Arnold diffusion in the swing equations of a power system, IEEE Trans. on Circ. and Sys. CAS-30t8 (1984) 673-688.
[327] Salzmann, B., Finite amplitude free convection as an initial value problem, J. Atmos. Sci. 19 (1962) 239-341.
[328] Samaranayake, S., Bajaj, A.K., and Nwokah, O.D.I., Amplitude modulated dynamics and bifurcations in the resonant response of a structure with cyclic symmetry, Acta Mech. 109 (1995) 101-125.
[329] Sanders, 1.A. and Verhulst, F., Averaging Methods in Nonlinear Dynamical Systems, Springer-Verlag, New York (1985).
[330] Sandstede, B., Jones, C.K.R.T., and Alexander, 1.C, Existence and stability of Npulses on optical fibers with phase-sensitive amplifiers, Physica D 106 (1997) 167-206.
[331] Sandstede, B., Stability of multiple-pulse solutions, Trans. Amer. Math. Soc. 350 (1998) 429-472.
[332] Savage, CM. and Walls, D.F., Optical chaos in second-harmonic generation, Opt. Acta 30 (1983) 557-561.
[333] Seifert, G., On chaos in general semiflows, Nonlinear Anal. 28 (1997) 1719-1727.
[334] Serrin, 1., Mathematical principles of classical fluid mechanics, in Encyclopedia of Physics 8, Ch. 24, Springer, New York (1959).
41 8 References
[335] Shatah, J. and Zeng, C., Homoclinic orbits for perturbed sine-Gordon equation, preprint (1998).
[336] Shaw, S. and Wiggins, S., Chaotic dynamics of a whirling pendulum, Physica D 31 (1988) 190-211.
[337] Silnikov, L.P., A case of existence of a denumerable set of periodic motions, Sov. Math. Dokl. 6 (1965) 163-166.
[338] Silnikov, L.l"., Structure of a neighborhood of a homoclinic tube of an invariant torus, SOil. Dokl. Math. Dokl. 9 (1968) 624-628.
[339] Silnikov, L.P., A contribution to the problem of the structure of an extended neighborhood of a rough equilibrium state of saddle-focus type, Math. U.S.S.R. Sbornik 10 (1970) 91-102.
[340] Sibert, E.L., Hutchinson, J.S., Reihnardt, WP., and Hynes, J.T., Local mode energy transfer: Ebb and flow, Int. J. Quantum Chem. 9 (1982) 375-383.
[341] Silber, M. and Knobloch, E., Parametrically excited surface waves in square geometry, 137 (1989) 349-354.
[342] Silverman, S., On maps with dense orbits and the definition of chaos, Rocky Mountain J. Math. 22 (1992) 353-375.
[343] Simonelli, F. and Gollub, J.P., Surface wave mode interactions: effects of symmetry and degeneracy, J. Fluid Mech. 199 (1989) 471-494.
[344J Sirovich, L. and Rodriguez, J.D., Coherent structures and chaos: A model problem, Phys. Lett. A 120 (1987) 211-214.
[345] Sirovich, L., Chaotic dynamics of coherent structures, Physica D 37 (1989) 126-145.
[346] Smale, S., Diffeomorphisms with many periodic points, in Differential and Combinatorial Topology, S.S. Cairns (ed.), Princeton Univ. Press, Princeton (1963) 63-80.
[347] Sorbie, K.S. and Murrell, J.N., Analytical properties for triatomic molecules from spectroscopic data, Mol. Phys. 29 (1975) 1387-1407.
[348] Spivak, M., Calculus on Manifolds, Benjamin-Cummings, Reading, Mass. (1965).
[349] Sumpter, B.G. and Ezra, G.S., Semiclassical rotation-vibration energies for a triatomic molecule: H20, Chem. Phys. Lett. 142 (1987) 142-146.
[350] Szmolyan, P., Heteroclinic and homoclinic orbits in singular perturbation problems, J. Diff Eqs. 92 (1991) 255-281.
[351] Temam, R., Infinite-Dimensional Dynamical Systems in Mechanics and Physics, Springer-Verlag, New York (1988).
[352] Tien, WM., Namachchivaya, N.S., and Malhotra, N., Nonlinear dynamics of a shallow arch under periodic excitation II: I : 1 internal resonance, submitted to the Int. J. Non-Lin. Mech. 29 (1994) 367-386.
[353] Tin, S.-K., On the Dynamics of Tangent Spaces near a Normally Hyperbolic Invariant Manifold, Ph.D. thesis, Brown University (1994).
[354] Touhey, P., Yet another definition of chaos, Amer. Math. Monthly 104 (1997) 411-414.
[355] Treshchev, D.V., The mechanism of destruction of resonance tori of Hamiltonian systems, Math. USSR Sbornik 68 (1991) 181-203.
[356] Tresser, C., About some theorems by L. P. Silnikov, Ann. Inst. Henri Poincare 40 (1984) 440-461.
References 419
[357] Umeki, M., Faraday resonance in rectangular geometry, 1. Fluid Mech. 277 (1991) 161-192.
[358] Uzer, T., Theories of intramolecular vibrational energy transfer, Phys. Rep. 199 (1991) 73-146.
[359] Uzer, T., Farelly, D., Milligan J. A., Raines, P.E., and Skelton, J.P., Celestial mechanics on a microscopic scale, Science 253 (1991) 42-48.
[360] Vakakis, A.E, Dynamics of a nonlinear periodic structure with cyclic symmetry, Acta. Mech. 95 (1992) 197-226.
[361] Van der Aa, E. and Sanders, lA., On the 1 : 2: 1 resonance, its periodic orbits and integrals, in Asymptotic Analysis, from Theory to Applications, E Verhulst (ed.), Lect. Notes in Math 711, Springer-Verlag, New York (1979).
[362] Van der Aa, E., First order resonances in three-degree-of-freedom systems, Celest. Mech. 31 (1983) 163-191.
[363] Van der AA, E. and Verhulst, E, Asymptotic integrability and periodic solutions of a Hamiltonian system in 1: 2: 2 resonance, SIAM 1. Math. Anal. 15 (1984) 890-911.
[364] Wallace, J.M. and Balint, J.-L., Drag reduction using streamwise aligned riblets: Survey and new results, in Turbulence Management and Relaminarisation, H. W. Liepmann and T. Narashima (eds.) (1988) 133-147.
[365] Walsh, MJ., Drag characteristics of V-groove and transverse curvature riblets, in Viscous Drag Reduction, G. R. Hough (ed.) (1980) 168-184.
[366] Walther, H.-O., Inclination lemmas with dominated convergence, Z. Angew. Math. Phys. 38 (1987) 327-337.
[367] Wayne, C.E., Periodic and quasiperiodic solutions of a nonlinear wave equation, Comm. Math. Phys. 127 (1990) 479-528.
[368] Weinstein, A., Symplectic manifolds and their Lagrangian submanifolds, Advances in Math. 6 (1971) 329-346.
[369] Weinstein, A., Lagrangian submanifolds and Hamiltonian systems, Ann. Math. 98 (1973) 377-410.
[370] Weinstein, A., Normal modes for nonlinear Hamiltonian systems, Inv. Math. 20 (1973) 47-57.
[371] Wiggins, S. and Holmes, PJ., Homoclinic orbits in slowly varying oscillators, SIAM 1. Math. Anal. 18 (1987) 612-629.
[372] Wiggins, S., Global Bifurcations and Chaos-Analytical Methods, Springer-Verlag, New York (1988).
[373] Wiggins, S., Introduction to Applied Nonlinear Dynamical Systems and Chaos, Springer-Verlag, New York (1990).
[374] Wiggins, S., Global Dynamics, Phase Space Transport, Orbits Homoclinic to Resonances, and Applications, Fields Institute Monographs, 1. AMS, Providence, RI, (1993).
[375] Wiggins, S., Normally Hyperbolic Invariant Manifolds in Dynamical Systems, Springer-Verlag, New York (1994).
[376] Xi a, Z., Arnold diffusion in the restricted three-body problem, 1. Dyn. Diff. Eq. 5 (1993) 219-240.

420 References
[377] Xia, Z., Arnold diffusion and oscillatory solutions in the planar three-body problem, J. Diff. Eq. 110 (1994) 289-321.
[378] Xiao, L. and Kellman, M.E., Unified semiclassical dynamics for molecular resonance spectra, J. Chem. Phys. 90 (1989) 6086-6097.
[379] Yagasaki, K., Melnikov's method and chaos in quasiperiodically forced systems, in Nonlinear Dynamics: New Theoretical and Applied Results, Akademie Verlag, Berlin (1995).
[380] Yan, Y., Attractors and dimensions for discretizations of a weakly damped Schrodinger equation and a sine-Gordon equation, Nonlinear Anal. 20 (1993) 1417-1452.
[381] Yanagaida, E., Branching of double-pulse solutions from single-pulse solutions in nerve axon equations, J. Diff. Eqs. 66 (1987) 243-262.
[382] Yang, X.L. and Sethna, P.R., Non-linear phenomena in forced vibrations of a nearly square plate: antisymmetric case, J. Sound Vibr. 155 (1992) 413-441.
[383] Yosida, K., Functional Analysis, Springer-Verlag, New York (1980).
[384] Young, N., An Introduction to Hilbert Space, Cambridge University Press, Cambridge (1988).
[385] Zakharov, Y.E., L'vov, Y.S., and Starobinets, S.S., Spin-wave turbulence beyond the parametric excitation threshold, Sov. Phys. Usp. 17 (1975) 896-919.
[386] Zakharov, V.E. and Shabat, A.B., Exact theory of two dimensional self-focusing and one dimensional self-modulation of waves in nonlinear media, Sov. Phys. JETP 34 (1972) 62-69.
[387] Zehnder, E., Homoclinic points near elliptic fixed points, Comm. Pure Appl. Math. 26 (1973) 131-182.
[388] Zehnle, V. and Madel, P., Bifurcation diagrams for second harmonic generation in passive cavities, Optics Comm. 66 (1988) 216-218.
[389] Zeng, C., Homoclinic orbits for perturbed nonlinear Schrodinger equation, preprint (1998).
[390] Zhou, X. and Sirovich, L., Coherence and chaos in a model of turbulent boundary layer, Phys. Fluids A 4 (1992) 2855-2874.
Symbol Index
Alt (T), 381
C,60 aM, 372 tl¢,63
'V f, 395
Df,376
dj" 376 dim M, 371
divQ v, 5 dN ,138 V(Q),396
d(x, y), 393
EE(c),137
E(h),8
exp(t~), 379 j(y),37
f*w,384 {f, g}, 387
cpg,379 cpl;,379
¢I;, 379
F,,1 j(y, t), 37
r(p),25
F U ,25
f*w,383 g,378
YNk ' 138 H oo ,43
H k ,372 Hk,397
H;er(a, b), 398
Hb 398 H-k,397
H oo ,397
Int (M), 372
JM w, 389 iv w ,382 L2(a, b), 393
A,138 1\,43 ICC, 393
LJ'(a, b), 394 LOC(a, b), 394
A/(p),23
Lvf,377
Lvw, 385 M E ,65
MIG, 379
Nb 138 NM,373
N p M,373
v'(p),23
wD,386

422 Symbol Index
(j): ,386 (j)11,386 r2w,386 r2dq /\(lp ,7 P,I [1,59
PI" 14 lrl" 15 cr eu (p), 25 cr' (p), 23 cr SiI (p), 25 S ® T, 381 SAT,381 TpM,372 L m M,375 T*M,373
Tu(rp),396 [u, v], 378 V oc ,42 Vi; (g), 378 V"', 381 Wo(C),62 WQ"(C),63 S61P,374 Wk,Jl(a, b), 397 W S (M),21 Wi~c(P), 22 W SS (p),26 W"(M),21 Wl~C(P), 22 W Uil (p),26
XH ,8

Index
A priori stable system, 277 unstable system, 277
abelian Lie groups, 14 action-angle variables, 16 a-limit set, 2 Arnold diffusion, 256, 277 averaging, 36
multi phase, 38, 183 partial,39 second-order, 183
Backlund transformation, 296 Banach space, 393 base point, 65, 150,297,357 Bernoulli shift map, 44 bi-infinite binary symbols, 43 bifurcation
global,7 local,7 point, 7 universal homoclinic, 136, 166
in PDEs, 342 of whiskers, 266, 284
blowing up a singularity, 237 boundary
of a manifold, 372
orientation, 386 bump function, 398
Cantor set, 43 Cauchy's inequality, 392 Cauchy-Schwarz inequality, 393 chaos, 45
definition of, 46 Hamiltonian, 123 transient, 48
chaotic attractor, 48 dynamics, 46 orbit, 46 set, 46, 118
chart, 380 classical water molecule, 248 codimension, 372 compact support, 396 coordinate system, 371
global,374 cotangent
bundle, 373 space, 373
critical point, 377
D4 symmetry, 223

424 Index
degrees of freedom, 7 derivative
distributional, 396 exterior, 384 Frechet, 394 Gateaux, 395 Lie, 377, 385 notation for, 376 on manifolds, 376 partial, on Banach spaces, 395
diameter sequence, 138 differential equation
as a dynamical system, 3 on a manifold, 5
differential form, 382 closed,385 exact, 385
diffusion Arnold, 257, 277 barriers to, 263 cross-resonance, 257, 258, 284 path,278
disintegration of invariant manifolds, 114,337
distributions, 396 derivative of, 396 in the sense of, 13,305,396
divergence, 5 dynamical system, 1
Embedding, 376 energetic uniqueness, 137 energy as a coordinate, 91, 322 energy function, 103, 329
chain-independent, 110, 336 resonant, 131, 242
energy surface, 8 regular, 8
energy transfer, 204, 205, 232, 251, 253 energy vector, 359 entry conditions, 73, 314 entry point, 92, 96, 323 Euler variables, 236 exchange lemma, 31, 34
exponentially small, 33 generalized, 33
Fenichel fiber, 25, 306 fiber
Hamiltonian, 98 infinite-dimensional, 306 stable, unstable, 25
first integral, 9 FitzHugh-Nagumo equations, 31 fixed point, 1 flow, 1
of an ODE, 3 semi-,2
foliation, 24 infinite-dimensional, 306
Fourier series, 390 estimates on remainder terms of, 392
free group action, 379
Generating function, 11 time-dependent, 11
global map, 88,321 Gronwall estimate, 76 Gronwall inequality, 4, 392
Hk norm, 397 Hamiltonian, 7
canonical, 7 locally, 10 Poincare maps, 9 reduced,15 slow, 92 system
conservation properties of, 9, 12 generalized, 8 infinite-dimensional, 12
vector field, 8, 12 heteroclinic
cycles, attracting, 227 cycles, fast, 225 jumping, 141 orbit, 28 structure, "Cat's eyes," 145 structure, partially broken, 142
Hilbert space, 393 H-k norm, 398 homoclinic
excursions, 57 manifold, 29 orbit, 28 orbit to a sphere, 125 orbit, N-pulse, 66, 310 orbit, primary, 138
point, transverse, 40 tangle, 40, 123, 128 tree, 139
in an atmospheric problem, 214 in the NLS equation, 342
tree, breakup of, 172 homological equation, 35 hyperbolic set, 47 hyperbolicity
normal, 23 weak,27
in resonant normal forms, 245 in surface waves, 192
hypersurface, 372
Immersion, 376 infinitesimal generator, 379 integrability
by quadratures, 15 complete, 16, 290 complete, on a resonant manifold, 59 of a system, 15
integration on manifolds, 388 intersecting resonances, 255 invariant, 9
foliation, 24 locally, 19 manifold, 19 overflowing (inflowing), 19 positively (negatively), 19 torus, 17
involution, 15,387 isoenergetic
non degeneracy, 17 set, 8
Jump sequence, 65, 66, 114, 150,298, 310,337,357,358
KAM theory, 16 for whiskered tori, 17
U norm, 393 lambda lemma, 40 landing point, 66, 150, 310, 358 Lie
algebra, 378 bracket, 378 derivative, 377, 385
group, 378 group, action of, 379
linear wave equation, 12 Liouville
Index 425
-Arnold-Jost theorem on integrable systems, 16
theorem on volume,S Lipschitz constant, 4 local diffeomorphism, 376 local map, 87, 319 Lorenz equations, 45 Vi nonn, 394 LX norm, 394 Lyapunov-type numbers, 23, 25, 27
Manifold,371 center, 22 class C' ,371 codimension of, 372 critical, 28, 30, 56 dimension of, 371 infinite-dimensional,380 interior of, 372 invariant
infinite-dimensional, 24 normally hyperbolic, 23 persistence of, 23
modeled over a Banach space, 380 orientable, 385 parametrization of, 371 partially slow, 56, 298
infinite-dimensional,286 of higher codimension, 147,354
Poisson, 387 resonant, 28, 56, 240 slow, 30, 56, 294 stable
global, 22, 24 local,22 strong, 26
symplectic, 386 modeled over a Banach space, 12
with boundary, 372 maximal atlas, 380 mean value
inequality, 396 theorem, 395
Melnikov function, 50
426 Index
Melnikov (continued) method,48
Miles's amplitude equations, 179 Mobius strip, 374 momentum mapping, 14
for resonances, 235 Morse lemma, 377
N-chain, 64, 295, 297, 357 admissible, 103, 330 high-codimension case, 150
heteroclinic, 143 N-jump orbit, 114,337 N -pulse homoclinic orbit, 66, 150, 310,
358 existence of, 98, 103, 330, 358
nonlinear Schrodinger equation, 287 coupled, 288 discretized, 58 truncated, 57
nondegenerate form, 386 normal bundle, 373 normal form, 34
Birkhoff, 36, 232 Fenichel, 36, 68 Fenichel, infinite-dimensional, 311 Hamiltonian, 35 preliminary, 304
normal mode, 232 nonlinear, 232, 237
normal space, 373
0(2) symmetry, 222 w-Iimit set, 2 optical cavity, 215 orbit, I
N-jump, 114 ofa map, 2 periodic, 2
orbit space, 379 orientation, 385
-preserving map, 386 -reversing map, 386
Parametrically forced beam, 160 particle motion in the atmosphere, 210 partition of unity, 389 passage lemmas, 68, 310 passing orbit, 146
pendulum-type Hamiltonian, 262 phase shift, 63, 96
resonant, 131 phase shifts of opposite sign, 135 phase space, 1, 3
extended,3 reduced,14
Poincare -Cartan integral invariant, 10, 90 map, 2 section, 2
Poisson bracket, 387
canonical, 387 manifold, 387 structure, 387
preimage theorem, 377 proper group action, 379 pullback,383 pulse number, 138 pulse sequence, 138 pushforward, 383
Quotient space, 379
Regular point, 377 regular value, 377 resonance
boundary of, 262 double, 258 generator of, 232 junction, 258 multiple, 258 on an invariant manifold, 282 parabolic, 213 weak,258 weak-strong, 258 web,256
resonant equilibria, 231 manifold, 56 module, 234 normal form terms, 35, 36 torus, 16, 256, 282 torus, fully, 60
rigid body dynamics, 271,278 rotational orbit, 146,277
Sard's theorem, 377

sensitive dependence on initial conditions, 45
Silnikov cycle, 177, 188 manifold, 155,362
in the CNLS equations, 366 orbit, 51
generalized, 116, 172,188,210, 220,338,350
persistence of, in the weakly hyperbolic case, 193
Silnikov-Deng theorem, 54, 118 Simonelli-Gollub experiment, 178, 194 singular perturbation theory, 29
geometric, 30 singular reduced phase space, 236 slow
Hamiltonian, 92 manifold, 30 periodic orbit, 127 sphere, 126, 146 torus, 126 variable, 29
Smale horseshoe, 41 Smale-Birkhoff homoclinic theorem,
44 Sobolev space, 397 stability
structural, 6 of Hamiltonian fixed points, 7 of heteroclinic orbits, 167
Stokes theorem, generalized, 389 strange attractor, 158 string oscillations, 229 strong inclination property, 53 strong stable manifold, 26 subbundle, 374 subharmonic generation, 215 submanifold, 372
injectively immersed, 22, 376 isotropic, 21 Lagrangian, 21, 51
submersion, 376 subshift of finite type, 44 surface waves, 178 symbolic dynamics, 44 symplectic
form, 386 canonical,387
Index 427
strongly nondegenerate, 387 weak,387 weakly nondegenerate, 12,387
group action, 13 manifold, 386 map, 386 reduction, 13 structure, 386
Takeoff point, 66,114,150,310,337, 358
tangent bundle, 373 space, 372 vector, 373
tensor, 381 alternating, 381 product, 381
test function, 305, 396 topological
conjugacy, 44 equivalence, 6 semiconjugacy,44 transitivity, 45 transversality, 109
torus fully resonant, 60 slow, 126 weakly hyperbolic, 28 whiskered, 17
transition chain, 278 transversality, 374
topological, 109 transverse intersection, 374
necessary condition for, 375 turbulent boundary layers, 220
Vector bundle, 373 trivial, 374
vector field, 377 vibration absorbers, 199 volume form, 385 volume-preserving map, 385
Wedge product, 381, 383 whiskered torus, 17,257,263,280 Whitney sum, 374 widely spaced frequencies, 202

Applied Mathematical Sciences (continued from page U)
61. SattingerlWeaver: Lie Groups and Algebras with Applications to Physics, Geometry, and Mechanics.
62. LaSalle: The Stability and Control of Discrete Processes.
63. Grasman: Asymptotic Methods of Relaxation Oscillations and Applications.
64. Hsu: Cell-to-Cell Mapping: A Method of Global Analysis for Nonlinear Systems.
65. Rand/Armbruster: Perturbation Methods, Bifurcation Theory and Computer Algebra.
66. HlavaceIrlHaslinger/NecasVLovfsek: Solution of Variational Inequalities in Mechanics.
67. Cercignani: The Boltzmann Equation and Its Applications.
68. Temam: Infinite-Dimensional Dynamical Systems in Mechanics and Physics, 2nd ed.
69. Golubitsky/StewartlSchaeffer: Singularities and Groups in Bifurcation Theory, Vol. II.
70. ConstantiniFoiaslNicolaenkolTemam: Integral Manifolds and Inertial Manifolds for Dissipative Partial Differential Equations.
71. Catlin: Estimation, Control, and the Discrete Kalman Filter.
72. LochalrlMeunier: Multiphase Averaging for Classical Systems.
73. Wiggins: Global Bifurcations and Chaos. 74. MawhinIWillem: Critical Point Theory and
Hamiltonian Systems. 75. Abraham/MarsdeniRatiu: Manifolds, Tensor
Analysis, and Applications, 2nd ed. 76. Lagerstrom: Matched Asymptotic Expansions:
Ideas and Techniques. 77. Aldous: Probability Approximations via the
Poisson Clumping Heuristic. 78. Dacorogna: Direct Methods in the Calculus of
Variations. 79. Hernandez-Lerma: Adaptive Markov Processes. 80. Lawden: E\liptic Functions and Applications. 81. BlumaniKumei: Symmetries and Differential
Equations. 82. Kress: Linear Integral Equations, 2nd ed. 83. BebernesiEberly: Mathematical Problems from
Combustion Theory. 84. Joseph: Fluid Dynamics of Viscoelastic Fluids. 85. Yang: Wave Packets and Their Bifurcations in
Geophysical Fluid Dynamics. 86. DendrinosiSonis: Chaos and Socio-Spatial
Dynamics. 87. Weder: Spectral and Scattering Theory for Wave
Propagation in Perturbed Stratified Media. 88. BogaevskilPovzner: Algebraic Methods in
Nonlinear Perturbation Theory.
89. O'Malley: Singular Perturbation Methods for Ordinary Differential Equations.
90. Meyer/Hall: Introduction to Hamiltonian Dynamical Systems and the N-body Problem
91. Straughan: The Energy Method, Stability, and Nonlinear Convection.
92. Naber: The Geometry of Minkowski Spacetime. 93. ColtoniKress: Inverse Acoustic and
Electromagnetic Scattering Theory. 2nd ed. 94. Hoppensteadt: Analysis and Simulation of Chaotic
Systems. 95. Hackbusch: Iterative Solution of Large Sparse
Systems of Equations. 96. Marchioro/Pulvirenti: Mathematical Theory of
Incompressible Nonviscous Fluids. 97. Lasota/Mackey: Chaos, Fractals, and Noise:
Stochastic Aspects of Dynamics, 2nd ed. 98. de Boor/Hollig/Riemenschneider: Box Splines. 99. HaleILunel: Introduction to Functional Differential
Equations. 100. Sirovich (ed): Trends and Perspectives in
Applied Mathematics. 101. NusselYorke: Dynamics: Numerical Explorations,
2nded. 102. Chossatllooss: The Couette-Taylor Problem 103. Chorin: Vorticity and Turbulence. 104. Farkas: Periodic Motions. 105. Wiggins: Normally Hyperbolic Invariant
Manifolds in Dynamical Systems. 106. Cercignanilll/ner/Puivirenti: The Mathematical
Theory of Dilute Gases. 107. Antman: Nonlinear Problems of Elasticity. 108. Zeidler: Applied Functional Analysis:
Applications to Mathematical Physics. 109. Zeidler: Applied Functional Analysis: Main
Principles and Their Applications. 110. Diekmannlvan GiislVerduyn LuneVWalther:
Delay Equations: Functional-, Complex-, and Nonlinear Analysis.
III. Visintin: Differential Models of Hysteresis. 112. Kuznetsov: Elements of Applied Bifurcation
Theory, 2nd ed. 113. Hislop/Sigal: Introduction to Spectral Theory:
With Applications to Schr<ldinger Operators. 114. KevorkianiCole: Multiple Scale and Singular
Perturbation Methods. 115. Taylor: Partial Differential Equations I, Basic
Theory. 116. Taylor: Partial Differential Equations II,
Qualitative Studies of Linear Equations. 117. Taylor: Partial Differential Equations ill,
Nonlinear Equations.
(continued on next page)

Applied Mathematical Sciences
(continued from previous page)
118. Godlewski/Raviart: Numerical Approximation of Hyperbolic Systems of Conservation Laws.
119. Wu: Theory and Applications of Partial Functional Differential Equations.
120. Kirsch: An Introduction to the Mathematical Theory of Inverse Problems.
121. Brokate/Sprekels: Hysteresis and Phase Transitions.
122. Gliklikh: Global Analysis in Mathematical Physics: Geometric and Stochastic Methods.
123. Le/Schmitt: Global Bifurcation in Variational Inequalities: Applications to Obstacle and Unilateral Problems.
124. Polak: Optimization: Algorithms and Consistent Approximations.
125. Arnold/Khesin: Topological Methods in Hydrodynamics.
126. Hoppensteadtllzhikevich: Weakly Connected Neural Networks.
127. Isakov: Inverse Problems for Partial Differential Equations.
128. LilWiggins: Invariant Manifolds and Fibrations for Perturbed Nonlinear Schrodinger Equations.
129. Milller: Analysis of Spherical Symmetries in Euclidean Spaces. 130. Feintuch: Robust Control Theory in Hilbert
Space. 131. Ericksen: Introduction to the Thennodynamics of
Solids. Revised ed. 132. Ihlenburg: Finite Element Analysis of Acoustic
Scattering. 133. Vorovich: Nonlinear Theory of Shallow Shells. 134. VeinlDale: Determinants and Their Applications in
Mathematical Physics. 135. Drew/Passman: Theory of Multicornponent
Fluids. 136. CioranescuiSaint Jean Paulin: Homogenization
of Reticulated Structures. 137. Gurtin: Configurational Forces as Basic Concepts
of Continuum Physics. 138. HaUer: Chaos Near Resonance. 139. SulemiSulem: The Nonlinear Schrodinger
Equation: Self-Focusing and Wave Collapse.