Elementary Algebra Pq
47
Elementary algebra pq From Wikipedia, the free encyclopedia
description
1. From Wikipedia, the free encyclopedia2. Lexicographical order
Transcript of Elementary Algebra Pq
-
Elementary algebra pqFrom Wikipedia, the free encyclopedia
-
Contents
1 Parent function 11.1 See also . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 External links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Pointwise product 22.1 Formal denition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.3 Algebraic application of pointwise products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.4 Generalization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.5 See also . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Quadratic equation 43.1 Examples and applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43.2 Solving the quadratic equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2.1 Factoring by inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2.2 Completing the square . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2.3 Quadratic formula and its derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2.4 Reduced quadratic equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2.5 Discriminant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2.6 Geometric interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2.7 Quadratic factorization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2.8 Graphing for real roots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.9 Avoiding loss of signicance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4 Advanced topics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4.1 Alternative methods of root calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.4.2 Generalization of quadratic equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 See also . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.7 External links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Quadratic formula 214.1 Derivation of the formula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
i
-
ii CONTENTS
4.2 Geometrical Signicance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.3 Historical Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.4 Other derivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.4.1 Alternate method of completing the square . . . . . . . . . . . . . . . . . . . . . . . . . . 234.4.2 By substitution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.4.3 By using algebraic identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.4.4 By Lagrange resolvents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.5 See also . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.6 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.7 External links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Quartic function 305.1 History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.4 Inection points and golden ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.5 Solving a quartic equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.5.1 Nature of the roots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.5.2 General formula for roots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.5.3 Simpler cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.5.4 Converting to a depressed quartic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.5.5 Ferraris solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.5.6 Solving by factoring into quadratics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.5.7 Solving by Lagrange resolvent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.5.8 Solving with algebraic geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.6 See also . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.7 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.8 Further reading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.9 External links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.10 Text and image sources, contributors, and licenses . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.10.1 Text . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.10.2 Images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.10.3 Content license . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
-
Chapter 1
Parent function
In mathematics, a parent function is the simplest function of a family of functions that preserves the denition (orshape) of the entire family. For example, for the family of quadratic functions having the general form
y = ax2 + bx+ c ;
the simplest function is
y = x2
This is therefore the parent function of the family of quadratic equations.For linear and quadratic functions, the graph of any function can be obtained from the graph of the parent function bysimple translations and stretches parallel to the axes. For example, the graph of y = x2 4x + 7 can be obtained fromthe graph of y = x2 by translating +2 units along the X axis and +3 units along Y axis. This is because the equationcan also be written as y 3 = (x 2)2.For many trigonometric functions, the parent function is usually a basic sin(x), cos(x), or tan(x). For example, thegraph of y = A sin(x) + B cos(x) can be obtained from the graph of y = sin(x) by translating it through an angle along the positive X axis (where tan() = A B), then stretching it parallel to the Y axis using a stretch factor R, whereR2 = A2 + B2. This is because A sin(x) + B cos(x) can be written as R sin(x) (see List of trigonometric identities).The concept of parent function is less clear for polynomials of higher power because of the extra turning points, butfor the family of n-degree polynomial functions for any given n, the parent function is sometimes taken as xn, or, tosimplify further, x2 when n is even and x3 for odd n. Turning points may be established by dierentiation to providemore detail of the graph.
1.1 See also Curve sketching
1.2 External links Video explanation at VirtualNerd.com
1
-
Chapter 2
Pointwise product
For entrywise product, see Matrix multiplication#Hadamard product.
The pointwise product of two functions is another function, obtained by multiplying the image of the two functionsat each value in the domain. If f and g are both functions with domain X and codomain Y, and elements of Y can bemultiplied (for instance, Y could be some set of numbers), then the pointwise product of f and g is another functionfrom X to Y which maps x X to f(x)g(x).
2.1 Formal denitionLet X and Y be sets, and let multiplication be dened in Ythat is, for each y and z in Y let the product
: Y Y ! Y given by y z = yz
be well-dened. Let f and g be functions f, g : X Y. Then the pointwise product (f g) : X Y is dened by
(f g)(x) = f(x) g(x)
for each x in X. In the same manner in which the binary operator is omitted from products, we say that f g = fg.
2.2 ExamplesThe most common case of the pointwise product of two functions is when the codomain is a ring (or eld), in whichmultiplication is well-dened.
If Y is the set of real numbers R, then the pointwise product of f, g : X R is just normal multiplication ofthe images. For example, if we have f(x) = 2x and g(x) = x + 1 then
(fg)(x) = f(x)g(x) = 2x(x+ 1) = 2x2 + 2x
for every real number x in R.
The convolution theorem states that the Fourier transform of a convolution is the pointwise product of Fouriertransforms:
Fff gg = Fffg Ffgg
2
-
2.3. ALGEBRAIC APPLICATION OF POINTWISE PRODUCTS 3
2.3 Algebraic application of pointwise productsLet X be a set and let R be a ring. Since addition and multiplication are dened in R, we can construct an alge-braic structure known as an algebra out of the functions from X to R by dening addition, multiplication, and scalarmultiplication of functions to be done pointwise.If R X denotes the set of functions from X to R, then we say that if f, g are elements of R X, then f + g, fg, and rf, thelast of which is dened by
(rf)(x) = rf(x)
for all r in R, are all elements of R X.
2.4 GeneralizationIf both f and g have as their domain all possible assignments of a set of discrete variables, then their pointwise productis a function whose domain is constructed by all possible assignments of the union of both sets. The value of eachassignment is calculated as the product of the values of both functions given to each one the subset of the assignmentthat is in its domain.For example, given the function f1() for the boolean variables p and q, and f2() for the boolean variables q and r,both with the range in R, the pointwise product of f1() and f2() is shown in the next table:
2.5 See also Pointwise
-
Chapter 3
Quadratic equation
This article is about single-variable quadratic equations and their solutions. For more general information about thesingle-variable case, see Quadratic function. For the case of more than one variable, see Quadratic form.
In elementary algebra, a quadratic equation (from the Latin quadratus for "square") is any equation having the
The quadratic formula for the roots of the general quadratic equation
form
ax2 + bx+ c = 0
where x represents an unknown, and a, b, and c represent known numbers such that a is not equal to 0. If a = 0,then the equation is linear, not quadratic. The numbers a, b, and c are the coecients of the equation, and may bedistinguished by calling them, respectively, the quadratic coecient, the linear coecient and the constant or freeterm.[1]
Because the quadratic equation involves only one unknown, it is called "univariate". The quadratic equation onlycontains powers of x that are non-negative integers, and therefore it is a polynomial equation, and in particular it is asecond degree polynomial equation since the greatest power is two.Quadratic equations can be solved by a process known in American English as factoring and in other varieties ofEnglish as factorising, by completing the square, by using the quadratic formula, or by graphing. Solutions to problemsequivalent to the quadratic equation were known as early as 2000 BC.
3.1 Examples and applicationsThe golden ratio is found as the solution of the quadratic equation x2 x 1 = 0:The equations of the circle and the other conic sectionsellipses, parabolas, and hyperbolasare quadratic equationsin two variables.
4
-
3.2. SOLVING THE QUADRATIC EQUATION 5
Given the cosine or sine of an angle, nding the cosine or sine of the angle that is half as large involves solving aquadratic equation.The process of simplifying expressions involving the square root of an expression involving the square root of anotherexpression involves nding the two solutions of a quadratic equation.Descartes theorem states that for every four kissing (mutually tangent) circles, their radii satisfy a particular quadraticequation.The equation given by Fuss theorem, giving the relation among the radius of a bicentric quadrilateral's inscribedcircle, the radius of its circumscribed circle, and the distance between the centers of those circles, can be expressedas a quadratic equation for which the distance between the two circles centers in terms of their radii is one of thesolutions. The other solution of the same equation in terms of the relevant radii gives the distance between thecircumscribed circles center and the center of the excircle of an ex-tangential quadrilateral.
3.2 Solving the quadratic equation
Figure 1. Plots of quadratic function y = ax2 + bx + c, varying each coecient separately while the other coecients are xed (atvalues a = 1, b = 0, c = 0)
A quadratic equation with real or complex coecients has two solutions, called roots. These two solutions may ormay not be distinct, and they may or may not be real.
3.2.1 Factoring by inspectionIt may be possible to express a quadratic equation ax2 + bx + c = 0 as a product (px + q)(rx + s) = 0. In somecases, it is possible, by simple inspection, to determine values of p, q, r, and s that make the two forms equivalent toone another. If the quadratic equation is written in the second form, then the Zero Factor Property states that thequadratic equation is satised if px + q = 0 or rx + s = 0. Solving these two linear equations provides the roots of thequadratic.For most students, factoring by inspection is the rst method of solving quadratic equations to which they areexposed.[2]:202207 If one is given a quadratic equation in the form x2 + bx + c = 0, the sought factorization has
-
6 CHAPTER 3. QUADRATIC EQUATION
the form (x + q)(x + s), and one has to nd two numbers q and s that add up to b and whose product is c (this is some-times called Vietas rule[3] and is related to Vietas formulas). As an example, x2 + 5x + 6 factors as (x + 3)(x +2).The more general case where a does not equal 1 can require a considerable eort in trial and error guess-and-check,assuming that it can be factored at all by inspection.Except for special cases such as where b = 0 or c = 0, factoring by inspection only works for quadratic equationsthat have rational roots. This means that the great majority of quadratic equations that arise in practical applicationscannot be solved by factoring by inspection.[2]:207
3.2.2 Completing the square
Main article: Completing the squareThe process of completing the square makes use of the algebraic identity
3 2 1 0 1 2 3
3
2
1
3
2
1y = x2x2
x
y
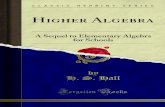
Figure 2. For the quadratic function y = x2 x 2, the points where the graph crosses the x-axis, x = 1 and x = 2, are thesolutions of the quadratic equation x2 x 2 = 0.
x2 + 2hx+ h2 = (x+ h)2;
-
3.2. SOLVING THE QUADRATIC EQUATION 7
which represents a well-dened algorithm that can be used to solve any quadratic equation.[2]:207 Starting with aquadratic equation in standard form, ax2 + bx + c = 0
1. Divide each side by a, the coecient of the squared term.
2. Rearrange the equation so that the constant term c/a is on the right side.
3. Add the square of one-half of b/a, the coecient of x, to both sides. This completes the square, convertingthe left side into a perfect square.
4. Write the left side as a square and simplify the right side if necessary.
5. Produce two linear equations by equating the square root of the left side with the positive and negative squareroots of the right side.
6. Solve the two linear equations.
We illustrate use of this algorithm by solving 2x2 + 4x 4 = 0
1) x2 + 2x 2 = 0
2) x2 + 2x = 2
3) x2 + 2x+ 1 = 2 + 1
4) (x+ 1)2= 3
5) x+ 1 = p3
6) x = 1p3
The plus-minus symbol "" indicates that both x = 1 + 3 and x = 1 3 are solutions of the quadratic equation.[4]
3.2.3 Quadratic formula and its derivation
Main article: Quadratic formula
Completing the square can be used to derive a general formula for solving quadratic equations, called the quadraticformula.[5] The mathematical proof will now be briey summarized.[6] It can easily be seen, by polynomial expansion,that the following equation is equivalent to the quadratic equation:
x+
b
2a
2=
b2 4ac4a2
:
Taking the square root of both sides, and isolating x, gives:
x =bpb2 4ac
2a:
Some sources, particularly older ones, use alternative parameterizations of the quadratic equation such as ax2 + 2bx+ c = 0 or ax2 2bx + c = 0 ,[7] where b has a magnitude one half of the more common one, possibly with oppositesign. These result in slightly dierent forms for the solution, but are otherwise equivalent.A number of alternative derivations can be found in the literature. These proofs are simpler than the standard com-pleting the square method, represent interesting applications of other frequently used techniques in algebra, or oerinsight into other areas of mathematics.
-
8 CHAPTER 3. QUADRATIC EQUATION
3.2.4 Reduced quadratic equationIt is sometimes convenient to reduce a quadratic equation so that its leading coecient is one. This is done by dividingboth sides by a, which is always possible since a is non-zero. This produces the reduced quadratic equation:[8]
x2 + px+ q = 0;
where p = b/a and q = c/a. This monic equation has the same solutions as the original.The quadratic formula for the solutions of the reduced quadratic equation, written in terms of its coecients, is:
x =1
2
p
pp2 4q
:
3.2.5 Discriminant
= 0
< 0
> 0
Figure 3. Discriminant signs
In the quadratic formula, the expression underneath the square root sign is called the discriminant of the quadraticequation, and is often represented using an upper case D or an upper case Greek delta:[9]
= b2 4ac:A quadratic equation with real coecients can have either one or two distinct real roots, or two distinct complexroots. In this case the discriminant determines the number and nature of the roots. There are three cases:
-
3.2. SOLVING THE QUADRATIC EQUATION 9
If the discriminant is positive, then there are two distinct roots
b+p2a
and bp
2a;
both of which are real numbers. For quadratic equations with rational coecients, if the discriminant isa square number, then the roots are rationalin other cases they may be quadratic irrationals.
If the discriminant is zero, then there is exactly one real root
b2a;
sometimes called a repeated or double root.
If the discriminant is negative, then there are no real roots. Rather, there are two distinct (non-real) complexroots[10]
b2a
+ i
p2a
and b2a
ip2a
;
which are complex conjugates of each other. In these expressions i is the imaginary unit.
Thus the roots are distinct if and only if the discriminant is non-zero, and the roots are real if and only if the discrim-inant is non-negative.
3.2.6 Geometric interpretationThe function f(x) = ax2 + bx + c is the quadratic function.[11] The graph of any quadratic function has the samegeneral shape, which is called a parabola. The location and size of the parabola, and how it opens, depend on thevalues of a, b, and c. As shown in Figure 1, if a > 0, the parabola has a minimum point and opens upward. If a < 0,the parabola has a maximum point and opens downward. The extreme point of the parabola, whether minimum ormaximum, corresponds to its vertex. The x-coordinate of the vertex will be located at x=b2a , and the y-coordinateof the vertex may be found by substituting this x-value into the function. The y-intercept is located at the point (0, c).The solutions of the quadratic equation ax2 + bx + c = 0 correspond to the roots of the function f(x) = ax2 + bx +c, since they are the values of x for which f(x) = 0. As shown in Figure 2, if a, b, and c are real numbers and thedomain of f is the set of real numbers, then the roots of f are exactly the x-coordinates of the points where the graphtouches the x-axis. As shown in Figure 3, if the discriminant is positive, the graph touches the x-axis at two points;if zero, the graph touches at one point; and if negative, the graph does not touch the x-axis.
3.2.7 Quadratic factorizationThe term
x r
is a factor of the polynomial
ax2 + bx+ c
-
10 CHAPTER 3. QUADRATIC EQUATION
The trajectory of the cli jumper is parabolic because horizontal displacement is a linear function of time x = vxt , while verticaldisplacement is a quadratic function of time y = 1
2at2 + vyt+ h . As a result the path follows quadratic equation y = a2v2x x
2 +vyvx
x+ h , where vx and vy are horizontal and vertical components of the original velocity, a is gravity and h is original height.
if and only if r is a root of the quadratic equation
ax2 + bx+ c = 0:
It follows from the quadratic formula that
ax2 + bx+ c = a
x b+
pb2 4ac2a
! x b
pb2 4ac2a
!:
In the special case b2 = 4ac where the quadratic has only one distinct root (i.e. the discriminant is zero), the quadraticpolynomial can be factored as
ax2 + bx+ c = a
x+
b
2a
2:
3.2.8 Graphing for real roots
For most of the 20th century, graphing was rarely mentioned as a method for solving quadratic equations in highschool or college algebra texts. Students learned to solve quadratic equations by factoring, completing the square,and applying the quadratic formula. Recently, graphing calculators have become common in schools and graphicalmethods have started to appear in textbooks, but they are generally not highly emphasized.[12]
-
3.3. HISTORY 11
Figure 4. Graphing calculator computation of one of the two roots of the quadratic equation 2x2 + 4x 4 = 0. Although the displayshows only ve signicant gures of accuracy, the retrieved value of xc is 0.732050807569, accurate to twelve signicant gures.
Being able to use a graphing calculator to solve a quadratic equation requires the ability to produce a graph of y =f(x), the ability to scale the graph appropriately to the dimensions of the graphing surface, and the recognition thatwhen f(x) = 0, x is a solution to the equation. The skills required to solve a quadratic equation on a calculator are infact applicable to nding the real roots of any arbitrary function.Since an arbitrary function may cross the x-axis at multiple points, graphing calculators generally require one toidentify the desired root by positioning a cursor at a guessed value for the root. (Some graphing calculators requirebracketing the root on both sides of the zero.) The calculator then proceeds, by an iterative algorithm, to rene theestimated position of the root to the limit of calculator accuracy.
3.2.9 Avoiding loss of signicance
Although the quadratic formula provides what in principle should be an exact solution, it does not, from a numericalanalysis standpoint, provide a completely stable method for evaluating the roots of a quadratic equation. If the tworoots of the quadratic equation vary greatly in absolute magnitude, b will be very close in magnitude to
pb2 4ac ,
and the subtraction of two nearly equal numbers will cause loss of signicance or catastrophic cancellation. A secondform of cancellation can occur between the terms b2 and 4ac of the discriminant, which can lead to loss of up tohalf of correct signicant gures.[7][13]
3.3 HistoryBabylonian mathematicians, as early as 2000 BC (displayed on Old Babylonian clay tablets) could solve problemsrelating the areas and sides of rectangles. There is evidence dating this algorithm as far back as the Third Dynasty ofUr.[14] In modern notation, the problems typically involved solving a pair of simultaneous equations of the form:
x+ y = p; xy = q
which are equivalent to the equation:[15]:86
-
12 CHAPTER 3. QUADRATIC EQUATION
x2 + q = px
The steps given by Babylonian scribes for solving the above rectangle problem were as follows:
1. Compute half of p.2. Square the result.3. Subtract q.4. Find the square root using a table of squares.5. Add together the results of steps (1) and (4) to give x. This is essentially equivalent to calculating x = p2 +q
p2
2 qGeometric methods were used to solve quadratic equations in Babylonia, Egypt, Greece, China, and India. TheEgyptian Berlin Papyrus, dating back to the Middle Kingdom (2050 BC to 1650 BC), contains the solution to a two-term quadratic equation.[16] In the Indian Sulba Sutras, circa 8th century BC, quadratic equations of the form ax2 = cand ax2 + bx = c were explored using geometric methods. Babylonian mathematicians from circa 400 BC and Chinesemathematicians from circa 200 BC used geometric methods of dissection to solve quadratic equations with positiveroots.[17][18] Rules for quadratic equations were given in the The Nine Chapters on the Mathematical Art, a Chinesetreatise on mathematics.[18][19] These early geometric methods do not appear to have had a general formula. Euclid,the Greek mathematician, produced a more abstract geometrical method around 300 BC. With a purely geometricapproach Pythagoras and Euclid created a general procedure to nd solutions of the quadratic equation. In his workArithmetica, the Greek mathematician Diophantus solved the quadratic equation, but giving only one root, even whenboth roots were positive.[20]
In 628 AD, Brahmagupta, an Indian mathematician, gave the rst explicit (although still not completely general)solution of the quadratic equation ax2 + bx = c as follows: To the absolute number multiplied by four times the[coecient of the] square, add the square of the [coecient of the] middle term; the square root of the same, lessthe [coecient of the] middle term, being divided by twice the [coecient of the] square is the value. (Brahmas-phutasiddhanta, Colebrook translation, 1817, page 346)[15]:87 This is equivalent to:
x =
p4ac+ b2 b
2a:
The Bakhshali Manuscript written in India in the 7th century AD contained an algebraic formula for solving quadraticequations, as well as quadratic indeterminate equations (originally of type ax/c = yMuhammad ibn Musa al-Khwarizmi(Persia, 9th century), inspired by Brahmagupta, developed a set of formulas that worked for positive solutions. Al-Khwarizmi goes further in providing a full solution to the general quadratic equation, accepting one or two numericalanswers for every quadratic equation, while providing geometric proofs in the process.[21] He also described themethod of completing the square and recognized that the discriminant must be positive,[21][22]:230 which was provenby his contemporary 'Abd al-Hamd ibn Turk (Central Asia, 9th century) who gave geometric gures to prove thatif the discriminant is negative, a quadratic equation has no solution.[22]:234 While al-Khwarizmi himself did not ac-cept negative solutions, later Islamic mathematicians that succeeded him accepted negative solutions,[21]:191 as wellas irrational numbers as solutions.[23] Ab Kmil Shuj ibn Aslam (Egypt, 10th century) in particular was the rstto accept irrational numbers (often in the form of a square root, cube root or fourth root) as solutions to quadraticequations or as coecients in an equation.[24] The 9th century Indian mathematician Sridhara wrote down rules forsolving quadratic equations.[25]
The Jewish mathematician Abraham bar Hiyya Ha-Nasi (12th century, Spain) authored the rst European bookto include the full solution to the general quadratic equation.[26] His solution was largely based on Al-Khwarizmiswork.[21] The writing of the Chinese mathematician Yang Hui (12381298 AD) is the rst known one in whichquadratic equations with negative coecients of 'x' appear, although he attributes this to the earlier Liu Yi.[27] By1545 Gerolamo Cardano compiled the works related to the quadratic equations. The quadratic formula covering allcases was rst obtained by Simon Stevin in 1594.[28] In 1637 Ren Descartes published La Gomtrie containing thequadratic formula in the form we know today. The rst appearance of the general solution in the modern mathematicalliterature appeared in an 1896 paper by Henry Heaton.[29]
-
3.4. ADVANCED TOPICS 13
3.4 Advanced topics
3.4.1 Alternative methods of root calculationVietas formulas
Main article: Vietas formulasVietas formulas give a simple relation between the roots of a polynomial and its coecients. In the case of the
Figure 5. Graph of the dierence between Vietas approximation for the smaller of the two roots of the quadratic equation x2 +bx + c = 0 compared with the value calculated using the quadratic formula. Vietas approximation is inaccurate for small b but isaccurate for large b. The direct evaluation using the quadratic formula is accurate for small b with roots of comparable value butexperiences loss of signicance errors for large b and widely spaced roots. The dierence between Vietas approximation versus thedirect computation reaches a minimum at the large dots, and rounding causes squiggles in the curves beyond this minimum.
quadratic polynomial, they take the following form:
x1 + x2 = ba
and
x1 x2 =c
a:
These results follow immediately from the relation:
(x x1) (x x2) = x2 (x1 + x2)x+ x1x2 = 0;which can be compared term by term with
x2 + (b/a)x+ c/a = 0:
The rst formula above yields a convenient expression when graphing a quadratic function. Since the graph is sym-metric with respect to a vertical line through the vertex, when there are two real roots the vertexs x-coordinate islocated at the average of the roots (or intercepts). Thus the x-coordinate of the vertex is given by the expression
-
14 CHAPTER 3. QUADRATIC EQUATION
xV =x1 + x2
2= b
2a:
The y-coordinate can be obtained by substituting the above result into the given quadratic equation, giving
yV = b2
4a+ c = b
2 4ac4a
:
As a practical matter, Vietas formulas provide a useful method for nding the roots of a quadratic in the case whereone root is much smaller than the other. If | x 2|
-
3.4. ADVANCED TOPICS 15
where the subscripts n and p correspond, respectively, to the use of a negative or positive sign in equation [1]. Sub-stituting the two values of or found from equations [4] or [5] into [2] gives the required roots of [1]. Complexroots occur in the solution based on equation [5] if the absolute value of sin 2 exceeds unity. The amount of eortinvolved in solving quadratic equations using this mixed trigonometric and logarithmic table look-up strategy wastwo-thirds the eort using logarithmic tables alone.[30] Calculating complex roots would require using a dierenttrigonometric form.[31]
To illustrate, let us assume we had available seven-place logarithm and trigonometric tables, and wishedto solve the following to six-signicant-gure accuracy:
4:16130x2 + 9:15933x 11:4207 = 0
1. A seven-place lookup table might have only 100,000 entries, and computing intermediate results to seven placeswould generally require interpolation between adjacent entries.
2. log a = 0:6192290; log b = 0:9618637; log c = 1:0576927
3. 2pac/b = 2 10(0:6192290+1:0576927)/20:9618637 = 1:505314
4. = (tan1 1:505314)/2 = 28:20169 or 61:79831
5. log jtan j = 0:2706462 or 0:2706462
6. logpc/a = (1:0576927 0:6192290)/2 = 0:2192318
7. x1 = 100:21923180:2706462 = 0:888353 (rounded to six signicant gures)
x2 = 100:2192318+0:2706462 = 3:08943
Solution for complex roots in polar coordinates
If the quadratic equation ax2+bx+c = 0 with real coecients has two complex rootsthe case where b24ac < 0;requiring a and c to have the same sign as each otherthen the solutions for the roots can be expressed in polar formas[32]
x1; x2 = r(cos i sin );
where r =p ca and = cos1 b2pac :Geometric solution
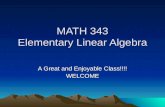
The quadratic equation may be solved geometrically in a number of ways. One way is via Lills method. The threecoecients a, b, c are drawn with right angles between them as in SA, AB, and BC in Figure 6. A circle is drawn withthe start and end point SC as a diameter. If this cuts the middle line AB of the three then the equation has a solution,and the solutions are given by negative of the distance along this line from A divided by the rst coecient a or SA.If a is 1 the coecients may be read o directly. Thus the solutions in the diagram are AX1/SA and AX2/SA.[33]
The Carlyle circle, named after Thomas Carlyle, has the property that the solutions of the quadratic equation are thehorizontal coordinates of the intersections of the circle with the horizontal axis.[34] Carlyle circles have been used todevelop ruler-and-compass constructions of regular polygons.
-
16 CHAPTER 3. QUADRATIC EQUATION
S
a
b
c
X1 X2A B
C
Figure 6. Geometric solution of ax2 + bx + c = 0 using Lills method. Solutions are AX1/SA, AX2/SA
3.4.2 Generalization of quadratic equation
The formula and its derivation remain correct if the coecients a, b and c are complex numbers, or more generallymembers of any eld whose characteristic is not 2. (In a eld of characteristic 2, the element 2a is zero and it isimpossible to divide by it.)The symbol
pb2 4ac
in the formula should be understood as either of the two elements whose square is b2 4ac, if such elements exist.In some elds, some elements have no square roots and some have two; only zero has just one square root, except inelds of characteristic 2. Even if a eld does not contain a square root of some number, there is always a quadraticextension eld which does, so the quadratic formula will always make sense as a formula in that extension eld.
Characteristic 2
In a eld of characteristic 2, the quadratic formula, which relies on 2 being a unit, does not hold. Consider the monicquadratic polynomial
-
3.4. ADVANCED TOPICS 17
Carlyle circle of the quadratic equation x2 sx + p = 0.
x2 + bx+ c
over a eld of characteristic 2. If b = 0, then the solution reduces to extracting a square root, so the solution is
x =pc
and there is only one root since
pc = pc+ 2pc = pc:
In summary,
x2 + c = (x+pc)2:
See quadratic residue for more information about extracting square roots in nite elds.In the case that b 0, there are two distinct roots, but if the polynomial is irreducible, they cannot be expressedin terms of square roots of numbers in the coecient eld. Instead, dene the 2-root R(c) of c to be a root of thepolynomial x2 + x + c, an element of the splitting eld of that polynomial. One veries that R(c) + 1 is also a root. Interms of the 2-root operation, the two roots of the (non-monic) quadratic ax2 + bx + c are
b
aRacb2
and
-
18 CHAPTER 3. QUADRATIC EQUATION
b
a
Racb2
+ 1:
For example, let a denote a multiplicative generator of the group of units of F4, the Galois eld of order four (thus aand a + 1 are roots of x2 + x + 1 over F4. Because (a + 1)2 = a, a + 1 is the unique solution of the quadratic equationx2 + a = 0. On the other hand, the polynomial x2 + ax + 1 is irreducible over F4, but it splits over F16, where it hasthe two roots ab and ab + a, where b is a root of x2 + x + a in F16.This is a special case of ArtinSchreier theory.
3.5 See also Chakravala method Completing the square Cubic function Fundamental theorem of algebra Linear equation Parabola Periodic points of complex quadratic mappings Quadratic function Quadratic polynomial Quartic function Quintic function Solving quadratic equations with continued fractions
3.6 References[1] Protters & Morrey: " Calculus and Analytic Geometry. First Course
[2] Washington, Allyn J. (2000). Basic Technical Mathematics with Calculus, Seventh Edition. Addison Wesley Longman, Inc.ISBN 0-201-35666-X.
[3] Ebbinghaus, Heinz-Dieter; Ewing, John H. (1991), Numbers, Graduate Texts in Mathematics 123, Springer, p. 77, ISBN9780387974972.
[4] Sterling, Mary Jane (2010), Algebra I For Dummies, Wiley Publishing, p. 219, ISBN 978-0-470-55964-2
[5] Rich, Barnett; Schmidt, Philip (2004), Schaums Outline of Theory and Problems of Elementary Algebra, The McGraw-HillCompanies, ISBN 0-07-141083-X, Chapter 13 4.4, p. 291
[6] Himonas, Alex. Calculus for Business and Social Sciences, p. 64 (Richard Dennis Publications, 2001).
[7] Kahan, Willian (November 20, 2004), On the Cost of Floating-Point Computation Without Extra-Precise Arithmetic (PDF),retrieved 2012-12-25
[8] Alenitsyn, Aleksandr and Butikov, Evgeni. Concise Handbook of Mathematics and Physics, p. 38 (CRC Press 1997)
[9] is the initial of the Greek word , Diakrnousa, discriminant.
[10] Achatz, Thomas; Anderson, John G.; McKenzie, Kathleen (2005). Technical Shop Mathematics. Industrial Press. p. 277.ISBN 0-8311-3086-5.
[11] Wharton, P. (2006). Essentials of Edexcel Gcse Math/Higher. Lonsdale. p. 63. ISBN 978-1-905-129-78-2.
-
3.6. REFERENCES 19
[12] Ballew, Pat. Solving Quadratic Equations By analytic and graphic methods; Including several methods you may neverhave seen (PDF). Retrieved 18 April 2013.
[13] Higham, Nicholas (2002), Accuracy and Stability of Numerical Algorithms (2nd ed.), SIAM, p. 10, ISBN 978-0-89871-521-7
[14] Friberg, Jran (2009). A Geometric Algorithm with Solutions to Quadratic Equations in a Sumerian Juridical Documentfrom Ur III Umma. Cuneiform Digital Library Journal 3.
[15] Stillwell, John (2004). Mathematics and Its History (2nd ed.). Springer. ISBN 0-387-95336-1.
[16] The Cambridge Ancient History Part 2 Early History of the Middle East. Cambridge University Press. 1971. p. 530. ISBN978-0-521-07791-0.
[17] Henderson, David W. Geometric Solutions of Quadratic and Cubic Equations. Mathematics Department, Cornell Uni-versity. Retrieved 28 April 2013.
[18] Aitken, Wayne. A Chinese Classic: The Nine Chapters (PDF). Mathematics Department, California State University.Retrieved 28 April 2013.
[19] Smith, David Eugene (1958). History of Mathematics. Courier Dover Publications. p. 380. ISBN 978-0-486-20430-7.
[20] Smith, David Eugene (1958). History of Mathematics, Volume 1. Courier Dover Publications. p. 134. ISBN 0-486-20429-4., Extract of page 134
[21] Katz, V. J.; Barton, B. (2006). Stages in the History of Algebra with Implications for Teaching. Educational Studies inMathematics 66 (2): 185201. doi:10.1007/s10649-006-9023-7.
[22] Boyer, Carl B.; Uta C. Merzbach, rev. editor (1991). A History of Mathematics. John Wiley & Sons, Inc. ISBN 0-471-54397-7.
[23] O'Connor, John J.; Robertson, Edmund F., Arabic mathematics: forgotten brilliance?", MacTutor History of Mathematicsarchive, University of St Andrews. Algebra was a unifying theory which allowed rational numbers, irrational numbers,geometrical magnitudes, etc., to all be treated as algebraic objects."
[24] Jacques Sesiano, Islamic mathematics, p. 148, in Selin, Helaine; D'Ambrosio, Ubiratan, eds. (2000), Mathematics AcrossCultures: The History of Non-Western Mathematics, Springer, ISBN 1-4020-0260-2
[25] Smith, David Eugene (1958). History of Mathematics. Courier Dover Publications. p. 280. ISBN 978-0-486-20429-1.
[26] Livio, Mario (2006). The Equation that Couldn't Be Solved. Simon & Schuster. ISBN 0743258215.
[27] Ronan, Colin (1985). The Shorter Science and Civilisation in China. Cambridge University Press. p. 15. ISBN 978-0-521-31536-4.
[28] Struik, D. J.; Stevin, Simon (1958), The Principal Works of Simon Stevin, Mathematics (PDF) IIB, C. V. Swets &Zeitlinger, p. 470
[29] Heaton, H (1896). A Method of Solving Quadratic Equations. AmericanMathematicalMonthly 3 (10): 236237. JSTOR2971099.
[30] Seares, F. H. (1945). Trigonometric Solution of the Quadratic Equation. Publications of the Astronomical Society of thePacic 57 (339): 307309. Bibcode:1945PASP...57..307S. doi:10.1086/125759.
[31] Aude, H. T. R. (1938). The Solutions of the Quadratic Equation Obtained by the Aid of the Trigonometry. NationalMathematics Magazine 13 (3): 118121. doi:10.2307/3028750. JSTOR 3028750.
[32] Simons, Stuart, Alternative approach to complex roots of real quadratic equations, Mathematical Gazette 93, March 2009,9192.
[33] Bixby, William Herbert (1879), Graphical Method for nding readily the Real Roots of Numerical Equations of Any Degree,West Point N. Y.
[34] Weisstein, Eric W. Carlyle Circle. From MathWorldA Wolfram Web Resource. Retrieved 21 May 2013.
-
20 CHAPTER 3. QUADRATIC EQUATION
3.7 External links Hazewinkel, Michiel, ed. (2001), Quadratic equation, Encyclopedia of Mathematics, Springer, ISBN 978-1-
55608-010-4 Weisstein, Eric W., Quadratic equations, MathWorld. 101 uses of a quadratic equation 101 uses of a quadratic equation: Part II Step-by-step instructions on using the quadratic formula for any input
-
Chapter 4
Quadratic formula
The quadratic formula
In elementary algebra, the quadratic formula is the solution of the quadratic equation. There are other ways to solvethe quadratic equation instead of using the quadratic formula, such as factoring, completing the square, or graphing.Using the quadratic formula is often the most convenient way.The general quadratic equation is
ax2 + bx+ c = 0:
Here x represents an unknown, while a, b, and c are constants with a not equal to 0. One can verify that the quadraticformula satises the quadratic equation, by inserting the former into the latter. Each of the solutions given by thequadratic formula is called a root of the quadratic equation.Geometrically, these roots represent the x values at which any parabola, explicitly given as y = ax2+ bx+ c; crossesthe x axis. As well as being a formula that will yield the zeros of any parabola, the quadratic equation will give the axisof symmetry of the parabola, and it can be used to immediately determine how many zeros to expect the parabola tohave.
4.1 Derivation of the formulaOnce a student understands how to complete the square, they can then derive the quadratic formula.[1][2] For thatreason, the derivation is sometimes left as an exercise for the student, who can thereby experience rediscovery of thisimportant formula.[3][4] The explicit derivation is as follows.Divide the quadratic equation by a, which is allowed because a is non-zero:
x2 +b
ax+
c
a= 0:
21
-
22 CHAPTER 4. QUADRATIC FORMULA
Subtract c/a from both sides of the equation, yielding:
x2 +b
ax = c
a:
The quadratic equation is now in a form to which the method of completing the square can be applied. Thus, add aconstant to both sides of the equation such that the left hand side becomes a complete square:
x2 +b
ax+
b
2a
2= c
a+
b
2a
2;
which produces:
x+
b
2a
2= c
a+
b2
4a2
Accordingly, after rearranging the terms on the right hand side to have a common denominator, we obtain this:
x+
b
2a
2=
b2 4ac4a2
:
The square has thus been completed. Taking the square root of both sides yields the following equation:
x+b
2a=
pb2 4ac2a
:
Isolating x gives the quadratic formula:
x =bpb2 4ac
2a:
The plus-minus symbol "" indicates that both
x =b+pb2 4ac
2aand x = b
pb2 4ac2a
are solutions of the quadratic equation.[5] There are many alternatives of this derivation with minor dierences, mostlyconcerning the manipulation of a .Some sources, particularly older ones, use alternative parameterizations of the quadratic equation such as ax2 - 2bx+ c = 0[6] or ax2 + 2bx + c = 0,[7] where b has a magnitude one half of the more common one. These result in slightlydierent forms for the solution, but are otherwise equivalent.
4.2 Geometrical SignicanceWithout going into parabolas as geometrical objects on a cone (see Conic section), a parabola is any curve describedby a second-order polynomial, i.e. any equation of the form:p2 (x) = a2x
2 + a1x+ a0
where p2 represents the polynomial of order 2 and a0, a1, and a2 are constant coecients whose subscripts correspondto their respective terms order. The rst and foremost geometrical application of the quadratic formula is that it willdene the points along the x axis where the parabola will cross it. Additionally, if the quadratic formula were brokeninto two terms,
-
4.3. HISTORICAL DEVELOPMENT 23
x = bpb24ac2a = b2a
pb24ac2a
the denition of the axis of symmetry appears as the b2a term. The other term,pb24ac2a , must then be the
distance the zeros are away from the axis of symmetry, where the plus sign represents the distance away to the right,and the minus sign represents the distance away to the left.If this distance term were to decrease to zero, the axis of symmetry would be the x value of the zero, indicating thereis only one possible solution to the quadratic equation. Algebraically, this means that
pb2 4ac = 0; or simply
b2 4ac = 0; (where the left-hand side is referred to as the discriminant) for its term to be reduced to zero. Thisis simply once case of three, where the discriminant can indicate how many zeros the parabola will have. If thediscriminant were positive, the distance would be non-zero, and there will be two solutions, as expected. However,there is the case where the discriminant is less than zero, and this indicates the distance will be imaginary - or somemultiple of the unit i, such that i = p1 - and the parabolas zeros will be a complex number. The complex rootswill be complex conjugates, and by denition cannot be entirely real, where the real part of the complex root will bethe axis of symmetry, therefore geometrical interpretation is that there are no real values of x such that the parabolawill be observed to cross the x axis.
4.3 Historical DevelopmentThe earliest methods for solving quadratic equations were geometric. Babylonian cuneiform tablets contain problemsreducible to solving quadratic equations.[8] The Egyptian Berlin Papyrus, dating back to the Middle Kingdom (2050BC to 1650 BC), contains the solution to a two-term quadratic equation.[9]
The Greek mathematician Euclid (circa 300 BC) used geometric methods to solve quadratic equations in Book 2 ofhis Elements, an inuential mathematical treatise.[10] Rules for quadratic equations appear in the Chinese The NineChapters on the Mathematical Art circa 200 BC.[11][12] In his work Arithmetica, the Greek mathematician Diophantus(circa 250 BC) solved quadratic equations with a method more recognizably algebraic than the geometric algebra ofEuclid.[10] His solution gives only one root, even when both roots are positive.[13]
The Indian mathematician Brahmagupta (597668 AD) explicitly described the quadratic formula in his treatiseBrhmasphuasiddhnta published in 628 AD,[14] but written in words instead of symbols.[15] His solution of thequadratic equation ax2 + bx = c was as follows: To the absolute number multiplied by four times the [coecient ofthe] square, add the square of the [coecient of the] middle term; the square root of the same, less the [coecientof the] middle term, being divided by twice the [coecient of the] square is the value.[16] This is equivalent to:
x =
p4ac+ b2 b
2a:
The 9th-century Persian mathematician al-Khwrizm, inuenced by earlier Greek and Indian mathematicians, solvedquadratic equations algebraically.[17] The quadratic formula covering all cases was rst obtained by Simon Stevin in1594.[18] In 1637 Ren Descartes published La Gomtrie containing the quadratic formula in the form we knowtoday. The rst appearance of the general solution in the modern mathematical literature appeared in an 1896 paperby Henry Heaton.[19]
4.4 Other derivationsA number of alternative derivations of the quadratic formula can be found in the literature. These derivations either (a)are simpler than the standard completing the square method, (b) represent interesting applications of other frequentlyused techniques in algebra, or (c) oer insight into other areas of mathematics.
4.4.1 Alternate method of completing the squareThe great majority of algebra texts published over the last several decades teach completing the square using thesequence presented earlier: (1) divide each side by a, (2) rearrange, (3) then add the square of one-half of b/a.As pointed out by Larry Hoehn in 1975, completing the square can be accomplished by a dierent sequence thatleads to a simpler sequence of intermediate terms: (1) multiply each side by 4a, (2) rearrange, (3) then add b2.[20]
-
24 CHAPTER 4. QUADRATIC FORMULA
Euclid in Raphael's School of Athens
In other words, the quadratic formula can be derived as follows:
-
4.4. OTHER DERIVATIONS 25
ax2 + bx+ c = 0
4a2x2 + 4abx+ 4ac = 0
4a2x2 + 4abx = 4ac4a2x2 + 4abx+ b2 = b2 4ac
(2ax+ b)2 = b2 4ac2ax+ b =
pb2 4ac
2ax = bpb2 4ac
x =bpb2 4ac
2a:
This actually represents an ancient derivation of the quadratic formula, and was known to the Hindus at least as farback as 1025 AD.[21] Compared with the derivation in standard usage, this alternate derivation is shorter, involvesfewer computations with literal coecients, avoids fractions until the last step, has simpler expressions, and usessimpler math. As Hoehn states, it is easier 'to add the square of b' than it is 'to add the square of half the coecientof the x term'".[20]
4.4.2 By substitutionAnother technique is solution by substitution.[22] In this technique, we substitute x = y + m into the quadratic to get:
a(y +m)2 + b(y +m) + c = 0:
Expanding the result and then collecting the powers of y produces:
ay2 + y(2am+ b) + (am2 + bm+ c) = 0:
We have not yet imposed a second condition on y and m, so we now choose m so that the middle term vanishes. Thatis, 2am + b = 0 or m = b2a . Subtracting the constant term from both sides of the equation (to move it to the righthand side) and then dividing by a gives:
y2 =(am2 + bm+ c)
a:
Substituting for m gives:
y2 =( b24a + b
2
2a + c)
a=
b2 4ac4a2
:
Therefore, y = pb24ac2a ; substituting x = y +m = y b2a provides the quadratic formula.
4.4.3 By using algebraic identitiesThe following method was used by many historical mathematicians:[23]
Let the roots of the standard quadratic equation be r1 and r2. At this point, we recall the identity:
(r1 r2)2 = (r1 + r2)2 4r1r2:Taking the square root on both sides, we get:
-
26 CHAPTER 4. QUADRATIC FORMULA
r1 r2 = p
(r1 + r2)2 4r1r2:Since the coecient a 0, we can divide the standard equation by a to obtain a quadratic polynomial having the sameroots. Namely,
x2 +b
ax+
c
a= (x r1)(x r2) = x2 (r1 + r2)x+ r1r2:
From this we can see that the sum of the roots of the standard quadratic equation is given by ba , and the productof those roots is given by ca :Hence the identity can be rewritten as:
r1 r2 = r
( ba)2 4 c
a=
rb2
a2 4ac
a2=
pb2 4aca
:
Now,
r1 =(r1 + r2) + (r1 r2)
2= ba
pb24aca
2=bpb2 4ac
2a:
Since, r2 = r1 ba , if we take r1 = b+pb24ac2a then we obtain r2 = b
pb24ac2a and if we instead take
r1 =bpb24ac
2a then we calculate that r2 = b+pb24ac2a :Combining these results by using the standard shorthand,
we have that the solutions of the quadratic equation are given by:
x =bpb2 4ac
2a:
4.4.4 By Lagrange resolventsFor more details on this topic, see Lagrange resolvents.
An alternative way of deriving the quadratic formula is via the method of Lagrange resolvents,[24] which is an early partof Galois theory.[25] This method can be generalized to give the roots of cubic polynomials and quartic polynomials,and leads to Galois theory, which allows one to understand the solution of algebraic equations of any degree in termsof the symmetry group of their roots, the Galois group.This approach focuses on the roots more than on rearranging the original equation. Given a monic quadratic polyno-mial
x2 + px+ q;
assume that it factors as
x2 + px+ q = (x )(x );Expanding yields
x2 + px+ q = x2 (+ )x+ ;where p = (+ ) and q = .
-
4.4. OTHER DERIVATIONS 27
Since the order of multiplication does not matter, one can switch and and the values of p and qwill not change: onecan say that p and q are symmetric polynomials in and . In fact, they are the elementary symmetric polynomials any symmetric polynomial in and can be expressed in terms of + and : The Galois theory approachto analyzing and solving polynomials is: given the coecients of a polynomial, which are symmetric functions in theroots, can one break the symmetry and recover the roots? Thus solving a polynomial of degree n is related to theways of rearranging (permuting) n terms, which is called the symmetric group on n letters, and denoted Sn: Forthe quadratic polynomial, the only way to rearrange two terms is to swap them ("transpose" them), and thus solvinga quadratic polynomial is simple.To nd the roots and ; consider their sum and dierence:
r1 = +
r2 = :
These are called the Lagrange resolvents of the polynomial; notice that one of these depends on the order of theroots, which is the key point. One can recover the roots from the resolvents by inverting the above equations:
= 12 (r1 + r2)
= 12 (r1 r2) :
Thus, solving for the resolvents gives the original roots.Now r1 = + is a symmetric function in and ; so it can be expressed in terms of p and q, and in fact r1 = p;as noted above. But r2 = is not symmetric, since switching and yields r2 = (formally, thisis termed a group action of the symmetric group of the roots). Since r2 is not symmetric, it cannot be expressedin terms of the polynomials p and q, as these are symmetric in the roots and thus so is any polynomial expressioninvolving them. Changing the order of the roots only changes r2 by a factor of 1; and thus the square r22=()2 issymmetric in the roots, and thus expressible in terms of p and q. Using the equationappl
( )2 = (+ )2 4
yields
r22 = p2 4q
and thus
r2 = pp2 4q:
If one takes the positive root, breaking symmetry, one obtains:
r1 = pr2 =
pp2 4q
and thus
= 12
p+
pp2 4q
= 12
p
pp2 4q
Thus the roots are
-
28 CHAPTER 4. QUADRATIC FORMULA
12
p
pp2 4q
which is the quadratic formula. Substituting p= ba ;q= ca yields the usual form for when a quadratic is not monic. Theresolvents can be recognized as r12 =p2 =b2a being the vertex, and r22=p24qis the discriminant (of a monic polynomial).A similar but more complicated method works for cubic equations, where one has three resolvents and a quadraticequation (the resolving polynomial) relating r2 and r3; which one can solve by the quadratic equation, and similarlyfor a quartic (degree 4) equation, whose resolving polynomial is a cubic, which can in turn be solved.[24] The samemethod for a quintic equation yields a polynomial of degree 24, which does not simplify the problem, and in factsolutions to quintic equations in general cannot be expressed using only roots.
4.5 See also Discriminant Fundamental theorem of algebra
4.6 References[1] Rich, Barnett; Schmidt, Philip (2004), Schaums Outline of Theory and Problems of Elementary Algebra, The McGrawHill
Companies, ISBN 0-07-141083-X, Chapter 13 4.4, p. 291
[2] Li, Xuhui. An Investigation of Secondary School Algebra Teachers Mathematical Knowledge for Teaching Algebraic Equa-tion Solving, p. 56 (ProQuest, 2007): The quadratic formula is the most general method for solving quadratic equationsand is derived from another general method: completing the square.
[3] Rockswold, Gary. College algebra and trigonometry and precalculus, p. 178 (Addison Wesley, 2002).
[4] Beckenbach, Edwin et al. Modern college algebra and trigonometry, p. 81 (Wadsworth Pub. Co., 1986).
[5] Sterling, Mary Jane (2010), Algebra I For Dummies, Wiley Publishing, p. 219, ISBN 978-0-470-55964-2
[6] Kahan, Willian (November 20, 2004), On the Cost of Floating-Point Computation Without Extra-Precise Arithmetic (PDF),retrieved 2012-12-25
[7] Quadratic Equation, Proof Wiki, retrieved 2012-12-25
[8] Irving, Ron (2013). Beyond the Quadratic Formula. MAA. p. 34. ISBN 978-0-88385-783-0.
[9] The Cambridge Ancient History Part 2 Early History of the Middle East. Cambridge University Press. 1971. p. 530. ISBN978-0-521-07791-0.
[10] Irving, Ron (2013). Beyond the Quadratic Formula. MAA. p. 39. ISBN 978-0-88385-783-0.
[11] Aitken, Wayne. A Chinese Classic: The Nine Chapters (PDF). Mathematics Department, California State University.Retrieved 28 April 2013.
[12] Smith, David Eugene (1958). History of Mathematics. Courier Dover Publications. p. 380. ISBN 978-0-486-20430-7.
[13] Smith, David Eugene (1958). History of Mathematics. Courier Dover Publications. p. 134. ISBN 0-486-20429-4.
[14] Bradley, Michael. The Birth of Mathematics: Ancient Times to 1300, p. 86 (Infobase Publishing 2006).
[15] Mackenzie, Dana. The Universe in Zero Words: The Story of Mathematics as Told through Equations, p. 61 (PrincetonUniversity Press, 2012).
[16] Stillwell, John (2004). Mathematics and Its History (2nd ed.). Springer. p. 87. ISBN 0-387-95336-1.
[17] Irving, Ron (2013). Beyond the Quadratic Formula. MAA. p. 42. ISBN 978-0-88385-783-0.
[18] Struik, D. J.; Stevin, Simon (1958), The Principal Works of Simon Stevin, Mathematics (PDF) IIB, C. V. Swets &Zeitlinger, p. 470
-
4.7. EXTERNAL LINKS 29
[19] Heaton, H. (1896) A Method of Solving Quadratic Equations, American Mathematical Monthly 3(10), 236237.
[20] Hoehn, Larry (1975). A More Elegant Method of Deriving the Quadratic Formula. The Mathematics Teacher 68 (5):442443.
[21] Smith, David E. (1958). History of Mathematics, Vol. II. Dover Publications. p. 446. ISBN 0486204308.
[22] Joseph J. Rotman. (2010). Advanced modern algebra (Vol. 114). American Mathematical Soc. Section 1.1
[23] Debnath, L. (2009). The legacy of Leonhard Eulera tricentennial tribute. International Journal of Mathematical Educationin Science and Technology, 40(3), 353388. Section 3.6
[24] Clark, A. (1984). Elements of abstract algebra. Courier Corporation. p. 146.
[25] Prasolov, Viktor; Solovyev, Yuri (1997), Elliptic functions and elliptic integrals, AMS Bookstore, ISBN 978-0-8218-0587-9, 6.2, p. 134
4.7 External links Quadratic formula calculator Free Quadratic formula calculator Quadratic formula calculator Online Alternative formula (Wolfram)
-
Chapter 5
Quartic function
Graph of a polynomial of degree 4, with 3 critical points.
In mathematics, a quartic function, is a function of the form
30
-
5.1. HISTORY 31
f(x) = ax4 + bx3 + cx2 + dx+ e;
where a is nonzero, which is dened by a polynomial of degree four, called quartic polynomial.Sometimes the term biquadratic is used instead of quartic, but, usually, biquadratic function refers to a quadraticfunction of a square (or, equivalently, to the function dened by a quartic polynomial without terms of odd degree),having the form
f(x) = ax4 + cx2 + e:
A quartic equation, or equation of the fourth degree, is an equation that equates a quartic polynomial to zero, of theform
ax4 + bx3 + cx2 + dx+ e = 0;
where a 0.The derivative of a quartic function is a cubic function.Since a quartic function is dened by a polynomial of even degree, it has the same innite limit when the argumentgoes to positive or negative innity. If a is positive, then the function increases to positive innity at both ends; andthus the function has a global minimum. Likewise, if a is negative, it decreases to negative innity and has a globalmaximum. In both cases it may or may not have another local maximum and another local minimum.The degree four (quartic case) is the highest degree such that every polynomial equation can be solved by radicals.
5.1 HistoryLodovico Ferrari is credited with the discovery of the solution to the quartic in 1540, but since this solution, like allalgebraic solutions of the quartic, requires the solution of a cubic to be found, it could not be published immediately.[1]The solution of the quartic was published together with that of the cubic by Ferraris mentor Gerolamo Cardano inthe book Ars Magna (1545).The Soviet historian I. Y. Depman claimed that even earlier, in 1486, Spanish mathematician Valmes was burned atthe stake for claiming to have solved the quartic equation.[2] Inquisitor General Toms de Torquemada allegedly toldValmes that it was the will of God that such a solution be inaccessible to human understanding.[3] However Beckmann,who popularized this story of Depman in the west, said that it was unreliable and hinted that it may have been inventedas Soviet antireligious propaganda.[4] Beckmanns version of this story has been widely copied in several books andinternet sites, usually without his reservations and sometimes with fanciful embellishments. Several attempts to ndcorroborating evidence for this story, or even for the existence of Valmes, have failed.[5]
The proof that four is the highest degree of a general polynomial for which such solutions can be found was rstgiven in the AbelRuni theorem in 1824, proving that all attempts at solving the higher order polynomials wouldbe futile. The notes left by variste Galois prior to dying in a duel in 1832 later led to an elegant complete theory ofthe roots of polynomials, of which this theorem was one result.[6]
5.2 ExamplesThe Cassini oval, which is the locus of points all of which have the same product of distances to a pair of foci, is aquartic in two variables.The Cartesian oval, which is the locus of points all of which have the same weighted sum of distances to two foci, isa quartic in two variables.Limaons are quartics in two variables.
-
32 CHAPTER 5. QUARTIC FUNCTION
5.3 ApplicationsEach coordinate of the intersection points of two conic sections is a solution of a quartic equation. The same is truefor the intersection of a line and a torus. It follows that quartic equations often arise in computational geometry andall related elds such as computer graphics, computer-aided design, computer-aided manufacturing and optics. Hereare example of other geometric problems whose solution amounts of solving a quartic equation.In computer-aided manufacturing, the torus is a shape that is commonly associated with the endmill cutter. Tocalculate its location relative to a triangulated surface, the position of a horizontal torus on the Z-axis must be foundwhere it is tangent to a xed line, and this requires the solution of a general quartic equation to be calculated.A quartic equation arises also in the process of solving the crossed ladders problem, in which the lengths of twocrossed ladders, each based against one wall and leaning against another, are given along with the height at whichthey cross, and the distance between the walls is to be found.In optics, Alhazens problem is "Given a light source and a spherical mirror, nd the point on the mirror where thelight will be reected to the eye of an observer." This leads to a quartic equation.[7][8][9]
Finding the distance of closest approach of two ellipses involves solving a quartic equation.
5.4 Inection points and golden ratioLetting F and G be the distinct inection points of a quartic, and letting H be the intersection of the inection secantline FG and the quartic, nearer to G than to F, then G divides FH into the golden section:[10]
FG
GH=
1 +p5
2= ratio golden the:
Moreover, the area of the region between the secant line and the quartic below the secant line equals the area of theregion between the secant line and the quartic above the secant line. One of those regions is disjointed into sub-regionsof equal area.
5.5 Solving a quartic equation
5.5.1 Nature of the rootsGiven the general quartic equation
ax4 + bx3 + cx2 + dx+ e = 0
with real coecients and a 6= 0; the nature of its roots is mainly determined by the sign of its discriminant
= 256a3e3 192a2bde2 128a2c2e2 + 144a2cd2e 27a2d4+ 144ab2ce2 6ab2d2e 80abc2de+ 18abcd3 + 16ac4e 4ac3d2 27b4e2 + 18b3cde 4b3d3 4b2c3e+ b2c2d2
This may be rened by considering the signs of four other polynomials:
P = 8ac 3b2
such that P8a2 is the second degree coecient of the associated depressed quartic (see below);
Q = b3 + 8da2 4abc;
-
5.5. SOLVING A QUARTIC EQUATION 33
such that Q8a3 is the rst degree coecient of the associated depressed quartic;
0 = c2 3bd+ 12ae;
which is 0 if the quartic has a triple root; and
D = 64a3e 16a2c2 + 16ab2c 16a2bd 3b4
which is 0 if the quartic has two double roots.The possible cases for the nature of the roots are as follows:[11]
If < 0 then the equation has two real roots and two complex conjugate roots. If > 0 then the equations four roots are either all real or all complex.
If P < 0 and D < 0 then all four roots are real and distinct. If P > 0 or D > 0 then there are two pairs of complex conjugate roots.[12]
If = 0 then either the polynomial has a multiple root, or it is the square of a quadratic polynomial. Here arethe dierent cases that can occur: If P < 0 and D < 0 and 0 6= 0 , there is a real double root and two real simple roots. If D > 0 or (P > 0 and (D 0 or Q 0)), there is a real double root and two complex conjugate roots. If 0 = 0 and D 0, there is a triple root and a simple root, all real. If D = 0, then:
If P < 0, there are two real double roots. If P > 0 and Q = 0, there are two complex conjugate double roots. If 0 = 0 , all four roots are equal to b4a
There are some cases that do not seem to be covered, but they can not occur. For example > 0, P = 0 and D 0is not one of the cases. However if > 0 and P = 0 then D > 0 so this combination is not possible.
5.5.2 General formula for roots
Quartic formula written out in full. This formula is too unwieldy for general use, hence other methods or simpler formulas aregenerally used.[13]
The four roots x1; x2; x3; x4 for the general quartic equation
ax4 + bx3 + cx2 + dx+ e = 0
with a 0 are given in the following formula, which is deduced from the one in the section Solving by factoring intoquadratics by back changing the variables (see section Converting to a depressed quartic) and using the formulas forthe quadratic and cubic equations.
x1;2 = b4a
S 12
r4S2 2p+ q
S
x3;4 = b4a
+ S 12
r4S2 2p q
S
where p and q are the coecients of the second and of the rst degree respectively in the associated depressed quartic
-
34 CHAPTER 5. QUARTIC FUNCTION
p =8ac 3b2
8a2
q =b3 4abc+ 8a2d
8a3
and where
S =1
2
s23p+
1
3a
Q+
0Q
(ifS = 0below) formula, the of cases Special see ,
Q =3
s1 +
p21 4302
(ifQ = 0below) formula, the of cases Special see ,
with
0 = c2 3bd+ 12ae
1 = 2c3 9bcd+ 27b2e+ 27ad2 72ace
and
21 430 = 27 ; where is the aforementioned discriminant. The mathematical expressions ofthese last four terms are very similar to those of their cubic counterparts.
Special cases of the formula
If > 0; the value of Q is a non-real complex number. In this case, either all roots are non-real or they are allreal. In the latter case, the value of S is also real, and one may prefer to express it in a purely real way, by usingtrigonometric functions, as follows:
S =1
2
r23p+
2
3a
p0 cos
3
where
= arccos
1
2p
30
!:
If 6= 0 and 0 = 0; the sign ofp
21 430 =p
21 has to be chosen to have Q 6= 0; that is one should denep21 as 1; maintaining the sign of 1:
If S = 0; then one must change the choice of the cubic root in Q for having S 6= 0: This is always possible except ifthe quartic may be factored into
x+ b4a
4: The result is then correct, but misleading hiding the fact that no cubic
root is needed in this case. In fact this case may occur only if the numerator of q is zero, and the associated depressedquartic is biquadratic; it may thus be solved by the method described below.If = 0 and 0 = 0; and thus also 1 = 0; at least three roots are equal, and the roots are rational functions ofthe coecients.If = 0 and 0 6= 0; the above expression for the roots is correct but misleading, hiding the fact that the polynomialis reducible and no cubic root is needed to represent the roots.
5.5.3 Simpler cases
-
5.5. SOLVING A QUARTIC EQUATION 35
Reducible quartics
Consider the general quartic
Q(x) = a4x4 + a3x
3 + a2x2 + a1x+ a0:
It is reducible if Q=RS, where R and S are non-constant polynomials with rational coecients (or more generally withcoecients in the same eld as the coecients of Q). There are two ways to write such a factorization: Either
Q(x) = (x x1)(b3x3 + b2x2 + b1x+ b0)
or
Q(x) = (c2x2 + c1x+ c0)(d2x
2 + d1x+ d0):
In either case, the roots of Q are the roots of the factors, which may be computed by solving quadratic or cubicequations.Detecting such factorizations can be done by using the factor function of every computer algebra system. But, inmany cases, it may be done by hand-written computation. In the preceding section, we have already seen that thepolynomial is always reducible if its discriminant is zero (this is true for polynomials of every degree).A very special case of the rst case of factorization is when a0=0. This implies that x1=0 is a rst root, b3=a4, b2=a3,b1=a2, b0=a1, and the other roots may be computed by solving a cubic equation.If a4 + a3 + a2 + a1 + a0 = 0; then Q(1) = 0 and we have a factorization of the rst kind with x1=1. Similarly, ifa4 a3 + a2 a1 + a0 = 0; then Q(1) = 0 and we have a factorization of the rst kind with x1=1.Once a root x1 is known, the second factor of the factorization of the rst kind is the quotient of the Euclidean divisionof Q by x-x1. It is
a4x3 + (a4x1 + a3)x
2 + (a4x21 + a3x1 + a2)x+ a4x
31 + a3x
21 + a2x1 + a1:
If a0; a1; a2; a3; a4 are small integers a factorization of the rst kind is easy to detect: if x1 = pq ; with p and qcoprime integers, then q divides evenly a4, and p divides evenly a0. Thus, computing Q
pq
for every possible
values of p and q allows to nd the rational roots, if any.In the case of two quadratic factors or of large integer coecients, the factorization is harder to compute, and,in general, it is better to use the factor function of a computer algebra system (see polynomial factorization for adescription of the algorithms that are involved).
Biquadratic equations
If a3 = a1 = 0; then the biquadratic function
Q(x) = a4x4 + a2x
2 + a0
denes a biquadratic equation, which is easy to solve.Let z = x2: Then Q becomes a quadratic q in z;
q(z) = a4z2 + a2z + a0:
Let z+ and z be the roots of q. Then the roots of our quartic Q are
-
36 CHAPTER 5. QUARTIC FUNCTION
x1 = +pz+;
x2 = pz+;x3 = +
pz;
x4 = pz:
Quasi-palindromic equation
The polynomial
P (x) = a0x4 + a1x
3 + a2x2 + a1mx+ a0m
2
is almost palindromic, as
P (mx) =x4
m2P (
m
x)
(it is palindromic if m = 1).The change of variables z = x+ mx in
P (x)x2 = 0 produces the quadratic equation a0z2 + a1z + (a2 2ma0) = 0:
As x2 - xz + m= 0, the quartic equation
P (x) = 0
may be solved by applying twice the quadratic formula.
5.5.4 Converting to a depressed quarticFor solving purpose, it is generally better to convert the quartic into a depressed quartic by the following simple changeof variable. All formulas are simpler and some methods work only in this case. The roots of the original quartic areeasily recovered from that of the depressed quartic by the reverse change of variable.Let
a4x4 + a3x
3 + a2x2 + a1x+ a0 = 0 (1
0)
be the general quartic equation we want to solve.Dividing by a4, provides the equivalent equation
x4 + ax3 + bx2 + cx+ d = 0;
with
a =a3a4; b =
a2a4; c =
a1a4; d =
a0a4:
Substituting x by y a34a4 gives, after a simple term regrouping, the equation
y4 + py2 + qy + r = 0;
where
-
5.5. SOLVING A QUARTIC EQUATION 37
p =8b 3a2
8=8a2a4 3a23
8a24
q =a3 4ab+ 8c
8=a33 4a2a3a4 + 8a1a24
8a34
r =3a4 + 256d 64ca+ 16a2b
256=3a43 + 256a0a34 64a1a3a24 + 16a2a23a4
256a44
If y1, y2, y3, y4 are the roots of this depressed quartic, then the roots of the original quartic are y1 a4 = y1 a34a4
; y2 a4 = y2 a34a4 ; y3 a4 = y3 a34a4 ; y4 a4 = y4 a34a4 :
5.5.5 Ferraris solution
As explained in the preceding section, we may start with a depressed quartic equation
This depressed quartic can be solved by means of a method discovered by Lodovico Ferrari. The depressed equationmay be rewritten (this is easily veried by expanding the square and regrouping all terms in the left-hand side)
Then, we introduce a variable y into the factor on the left-hand side by adding 2u2y+2y+ y2 to both sides. Afterregrouping the coecients of the power of u in the right-hand side, this gives the equation
which is equivalent to the original equation, whichever value is given to y.As the value of y may be arbitrarily chosen, we will choose it in order to get a perfect square in the right-hand side.This implies that the discriminant in u of this quadratic equation is zero, that is y is a root of the equation
()2 4(2y + )(y2 + 2y+ 2 ) = 0:
which may be rewritten
This is the resolvent cubic of the quartic equation. The value of y may thus be obtained from the formulas providedin the article Cubic equation.When y is a root of equation (4), the right-hand side of equation (3) the square of
up+ 2y
2p+ 2y
2:
However, this induces a division by zero if + 2y = 0: This implies = 0; and thus that the depressed equationis bi-quadratic, and may be solved by an easier method (see above). This was not a problem at the time of Ferrari,when one solved only explicitly given equations with numeric coecients. For a general formula that is always true,one thus need to choose a root of the cubic equation such that + 2y 6= 0: This is always possible unless for thedepressed equation x4=0.Now, if y is a root of the cubic equation such that + 2y 6= 0; equation (3) may be rewritten
-
38 CHAPTER 5. QUARTIC FUNCTION
u2 + + y + u
p+ 2y
2p+ 2y
u2 + + y u
p+ 2y +
2p+ 2y
= 0;
and the equation is easily solved by applying to each factor the formula for quadratic equations. Solving them we maywrite the four roots as
u =
1p+ 2y 2
r3+ 2y 1 2p+2y
2
;
where 1 and 2 denote either + or . As the two occurrences of 1 must denote the same sign, this leave fourpossibilities, one for each root.Therefore the solutions of the original quartic equation are
x = a34a4
+
1p+ 2y 2
r3+ 2y 1 2p+2y
2
:
5.5.6 Solving by factoring into quadraticsOne can solve a quartic by factoring it into a product of two quadratics.[14] Let
0 = x4 + ax3 + bx2 + cx+ d = (x2 + px+ q)(x2 + rx+ s)= x4 + (p+ r)x3 + (q + s+ pr)x2 + (ps+ qr)x+ qs
By equating coecients, this results in the following set of simultaneous equations:
a = p+ rb = q + s+ prc = ps+ qrd = qs
This can be simplied by starting again with a depressed quartic where a = 0 , which can be obtained by substituting(x a/4) for x , then r = p , and:
b+ p2 = s+ qc = (s q)pd = sq
One can now eliminate both s and q by doing the following:
p2(b+ p2)2 c2 = p2(s+ q)2 p2(s q)2= 4p2sq= 4p2d
If we set P = p2 , then this equation turns into the resolvent cubic equation
P 3 + 2bP 2 + (b2 4d)P c2 = 0which is solved elsewhere. Then, if p is a square root of a non-zero root of this resolvent (such a non zero root existsexcept for the quartic x4, which is trivially factored),
-
5.5. SOLVING A QUARTIC EQUATION 39
r = p2s = b+ p2 + c/p2q = b+ p2 c/p
The symmetries in this solution are as follows. There are three roots of the cubic, corresponding to the three waysthat a quartic can be factored into two quadratics, and choosing positive or negative values of p for the square root ofP merely exchanges the two quadratics with one another.The above solution shows that the quartic polynomial with a zero coecient on the cubic term is factorable intoquadratics with rational coecients if and only if either the resolvent cubic P 3 + 2bP 2 + (b2 4d)P c2 hasa non-zero root which is the square of a rational, or b2 4d is the square of rational and c=0; this can readily bechecked using the rational root test.
5.5.7 Solving by Lagrange resolventThe symmetric group S4 on four elements has the Klein four-group as a normal subgroup. This suggests usinga resolvent cubic whose roots may be variously described as a discrete Fourier transform or a Hadamard matrixtransform of the roots; see Lagrange resolvents for the general method. Denote by xi, for i from 0 to 3, the four rootsof
x4 + ax3 + bx2 + cx+ d = 0
If we set
s0 =12 (x0 + x1 + x2 + x3);
s1 =12 (x0 x1 + x2 x3);
s2 =12 (x0 + x1 x2 x3);
s3 =12 (x0 x1 x2 + x3);
then since the transformation is an involution we may express the roots in terms of the four si in exactly the same way.Since we know the value s0 = -a/2, we only need the values for s1, s2 and s3. These are the roots of the polynomial
(s2 s21)(s2 s22)(s2 s23):
Substituting the si by their values in term of the xi, this polynomial may be expanded in a polynomial in s whosecoecients are symmetric polynomials in the xi. By the fundamental theorem of symmetric polynomials, thesecoecients may be expressed as polynomials in the coecients of the monic quartic. If, for simplication, wesuppose that the quartic is depressed, that is a=0, this results in the polynomial
This polynomial is of degree six, but only of degree three in s2, and so the corresponding equation is solvable by themethod described in the article Cubic function. By substituting the roots in the expression of the xi in terms of thesi, we obtain expression for the roots. In fact we obtain, apparently, several expressions, depending on the numberingof the roots of the cubic polynomial and of the signs given to their square roots. All these dierent expressions maybe deduced from one of them by simply changing the numbering of the xi.These expressions are unnecessarily complicated, involving the cubic roots of unity, which can be avoided as follows.If s is any non-zero root of (5), and if we set
F1 = x2 + sx+
b
2+s2
2 c
2s
-
40 CHAPTER 5. QUARTIC FUNCTION
F2 = x2 sx+ b
2+s2
2+
c
2s
then
F1F2 = x4 + bx2 + cx+ d
We therefore can solve the quartic by solving for s and then solving for the roots of the two factors using the quadraticformula.Note that this gives exactly the same formula for the roots as the preceding section.
5.5.8 Solving with algebraic geometry
An alternative solution using algebraic geometry is given in (Faucette 1996), and proceeds as follows (more detaileddiscussion in reference). In brief, one interprets the roots as the intersection of two quadratic curves, then nds thethree reducible quadratic curves (pairs of lines) that pass through these points (this corresponds to the resolvent cubic,the pairs of lines being the Lagrange resolvents), and then use these linear equations to solve the quadratic.The four roots of the depressed quartic x4 + px2 + qx + r = 0 may also be expressed as the x coordinates ofthe intersections of the two quadratic equations y2 + py + qx + r = 0; y x2 = 0; i.e., using the substitutiony = x2; that two quadratics intersect in four points is an instance of Bzouts theorem. Explicitly, the four points arePi := (xi; x
2i ) for the four roots xi of the quartic.
These four points are not collinear because they lie on the irreducible quadratic y = x2; and thus there is a 1-parameter family of quadratics (a pencil of curves) passing through these points. Writing the projectivization of thetwo quadratics as quadratic forms in three variables:
F1(X;Y; Z) := Y2 + pY Z + qXZ + rZ2;
F2(X;Y; Z) := Y Z X2
the pencil is given by the forms F1 + F2 for any point [; ] in the projective line in other words, where and are not both zero, and multiplying a quadratic form by a constant does not change its quadratic curve of zeros.This pencil contains three reducible quadratics, each corresponding to a pair of lines, each passing through two ofthe four points, which can be done
42
= 6 dierent ways. Denote these Q1 = L12 + L34; Q2 = L13 + L24;
Q3 = L14 + L23: Given any two of these, their intersection is exactly the four points.The reducible quadratics, in turn, may be determined by expressing the quadratic form F1 + F2 as a 33 matrix:reducible quadratics correspond to this matrix being singular, which is equivalent to its determinant being zero, andthe determinant is a homogeneous degree three polynomial in and ; and corresponds to the resolvent cubic.
5.6 See also
Linear function
Quadratic function
Cubic function
Quintic function
Polynomial
Newtons method
-
5.7. REFERENCES 41
5.7 References[1] O'Connor, John J.; Robertson, Edmund F., Lodovico Ferrari, MacTutor History of Mathematics archive, University of St
Andrews.
[2] Depman (1954), Rasskazy o matematike (in Russian), Leningrad: Gosdetizdat
[3] P. Beckmann (1971). A history of . Macmillan. p. 80.
[4] P. Beckmann (1971). A history of . Macmillan. p. 191.
[5] P. Zoll (1989). Letter to the Editor. American Mathematical Monthly 96 (8): 709710. JSTOR 2324719.
[6] Stewart, Ian, Galois Theory, Third Edition (Chapman & Hall/CRC Mathematics, 2004)
[7] O'Connor, John J.; Robertson, Edmund F., Abu Ali al-Hasan ibn al-Haytham, MacTutor History of Mathematics archive,University of St Andrews.
[8] MacKay, R. J.; Oldford, R. W. (August 2000), Scientic Method, Statistical Method and the Speed of Light, StatisticalScience 15 (3): 25478
[9] Weisstein, Eric. Alhazens Billiard Problem. Mathworld. Retrieved 2008-09-24.
[10] Rinvold, R.A., Fourth degree polynomials and the golden ratio, Mathematical Gazette 93, July 2009, 292295.
[11] Rees, E. L. (1922). Graphical Discussion of the Roots of a Quartic Equation. The American Mathematical Monthly 29(2): 5155. doi:10.2307/2972804.
[12] Lazard, D. (1988). Quantier elimination: Optimal solution for two classical examples. Journal of Symbolic Computation5: 261266. doi:10.1016/S0747-7171(88)80015-4.
[13] http://planetmath.org/QuarticFormula, PlanetMath, quartic formula, 21st October 2012
[14] Brookeld, G. (2007). Factoring quartic polynomials: A lost art. Mathematics Magazine 80 (1): 6770.
5.8 Further reading Cardano, Gerolamo (1545), Ars magna or The Rules of Algebra, Dover (published 1993), ISBN 0-486-67811-3 Faucette, William Mark (1996), A Geometric Interpretation of the Solution of the General Quartic Polyno-
mial, TheAmericanMathematicalMonthly 103 (1): 5157, doi:10.2307/2975214, CiteSeerX: 10 .1 .1 .111 .5574 Nickalls, R. W. D. (2009). The quartic equation: invariants and Eulers solution revealed (PDF).MathematicalGazette 93: 6675.
Carpenter, W. (1966). On the solution of the real quartic. MathematicsMagazine 39: 2830. doi:10.2307/2688990. Shmakov, S.L. (2011). A Universal Method of Solving Quartic Equations (PDF). International Journal ofPure and Applied Mathematics 71: 251259.
5.9 External links Quartic formula as four single equations at PlanetMath.org. Ferraris achievement Calculator for solving Quartics (also solves Cubics and Quadratics)
-
42 CHAPTER 5. QUARTIC FUNCTION
5.10 Text and image sources, contributors, and licenses5.10.1 Text
Parent function Source: https://en.wikipedia.org/wiki/Parent_function?oldid=637694638 Contributors: Dbrs, Gilliam, Loadmaster,Ikanreed, Alvin Seville, Allthingstoallpeople, Josve05a and Anonymous: 4
Pointwise product Source: https://en.wikipedia.org/wiki/Pointwise_product?oldid=663279202Contributors: Michael Hardy, Jitse Niesen,Salix alba, Crazycomputers, Ogai, SmackBot, Melchoir, Colonies Chris, Dr.enh, Xantharius, JamesAM, Mojo Hand, Magioladitis, Hy-pergeek14, Pomte, WOSlinker, Beroal, Addbot, Guoguo12, Blue000, Luckas-bot, Erik9bot, Quondum and Anonymous: 4
Quadratic equation Source: https://en.wikipedia.org/wiki/Quadratic_equation?oldid=674750132 Contributors: AxelBoldt, Tarquin,Gareth Owen, Youssefsan, Patrick, Michael Hardy, Pit~enwiki, Dominus, Liftarn, Dcljr, TakuyaMurata, Ahoerstemeier, Cyp, An-dres, Iorsh, Charles Matthews, G Prime, Jeepien, Anupamsr, Denelson83, Robbot, Fredrik, Chocolateboy, Lowellian, Timrollpickering,Acegikmo1, Bkell, HaeB, Peter L, Giftlite, Inter, BenFrantzDale, Lethe, Zigger, Monedula, Cantus, OTB, Jackol, Tonymaric, LiDaobing,Antandrus, OverlordQ, Anythingyouwant, Icairns, PhotoBox, Noisy, Discospinster, Paul August, Loren36, Jpgordon, Bobo192, Small-jim, R. S. Shaw, Rbj, TheProject, Grilo-TC, Obradovic Goran, Haham hanuka, Chicago god, Jumbuck, Storm Rider, Stephen G. Brown,Reubot, Alansohn, Free Bear, Arthena, Egil530, Matsw, Stack, Wtmitchell, Velella, Hawky, Culix, Sciurin, Cmprince, Seth Goldin, To-byc75, Oleg Alexandrov, Je7, Dejvid, Firsfron, Linas, Karnesky, Georgia guy, Camw, Gerd Breitenbach, Ruud Koot, WadeSimMiser,Hughcharlesparker, Zzyzx11, TheAlphaWolf, Palica, Gerbrant, Graham87, Magister Mathematicae, Josh Parris, Rjwilmsi, Quale, Salixalba, HappyCamper, ScottJ, AySz88, Vuong Ngan Ha, FlaBot, VKokielov, [email protected], Windchaser, Nihiltres, RexNL,Gurch, Fresheneesz, BradBeattie, CJLL Wright, Chobot, HKT, Nagytibi, DVdm, Nightwalkermage, Bgwhite, YurikBot, Wavelength,Borgx, RobotE, Eraserhead1, Mukkakukaku, Wolfmankurd, Adam1213, Postglock, Malevious, KSmrq, RadioFan2 (usurped), Cam-bridgeBayWeather, Rsrikanth05, Oni Lukos, Wimt, Shanel, NawlinWiki, Astral, Scs, Sfnhltb, Superiority, Haemo, Wknight94, Ms2ger,Ali K, Ninly, Closedmouth, Tim Parenti, Gulliveig, MathsIsFun, HereToHelp, ArielGold, Chainkill, Gesslein, Kungfuadam, Paul Erik,Syko, Sbyrnes321, DVD R W, That Guy, From That Show!, Resolute, True Pagan Warrior, SmackBot, Michaelliv, Adam majewski,Numsgil, Nihonjoe, Prodego, KnowledgeOfSelf, Hydrogen Iodide, 127, Iopq, Msn26586, Kilo-Lima, Jagged 85, WookieInHeat, Delldot,Macintosh User, Gilliam, Skizzik, Persian Poet Gal, Bduke, Tosqueira, Oli Filth, Miquonranger03, MalafayaBot, Octahedron80, Nbart