Elektromagnetische Kammermusik - grrrr.org · PDF fileVioline, des Ludwig-Drumkits ... unter...
36
Elektromagnetische Kammermusik Thomas Grill, 2007
-
Upload
nguyenhanh -
Category
Documents
-
view
218 -
download
0
Transcript of Elektromagnetische Kammermusik - grrrr.org · PDF fileVioline, des Ludwig-Drumkits ... unter...

Elektromagnetische Kammermusik
Thomas Grill, 2007

Thomas Grill - Elektromagnetische Kammermusik
3
Abstract
This work presents an experimental musical ensemble consisting of computer controlled electro-mechanical sounding bodies – the „electro-magnetic chamber music“ („elektro-magnetische Kammermusik“). On the basis of utterly reduced playing techniques and unavoidable error-proneness it is a goal to achieve sufficient control, cultivate characteristic sound and develop prototypical applications.
Kurzfassung
In dieser Arbeit wird ein experimentelles musikalisches Ensemble computergesteuerter, elektromechanischer Klangkörper vorgestellt – die „elektromagnetische Kammermusik“. Es wird versucht, auf der Ausgangsbasis äußerst reduzierter spieltechnischer Möglichkeiten und unvermeidbarer Fehleranfälligkeit ausreichende Kontrolle zu erreichen, charakteristische Klanglichkeit zu kultivieren und prototypische Anwendungen zu entwickeln.

Thomas Grill - Elektromagnetische Kammermusik
4
Inhaltsverzeichnis
Abstract..................................................................................................................................3
Kurzfassung ...........................................................................................................................3
Inhaltsverzeichnis...................................................................................................................4
I. Einleitung.........................................................................................................................5
II. Bezugspunkte zu existierenden Konzepten ......................................................................7
1. Traditionelle Instrumente .............................................................................................7 2. Musikautomaten ..........................................................................................................7 3. Instrumente abseits des “reinen” Klangs.......................................................................8 4. Klangstrukturen / Klangskulpturen...............................................................................9 5. Der Computer als Klangobjekt...................................................................................12 6. Der Computer als Klanggenerator ..............................................................................14
III. Positionierung des gegenständlichen Projekts in Bezug auf existierende Konzepte.......16
IV. Aufbau des Instruments ...............................................................................................17
1. Der Schallwandler......................................................................................................18 2. Ansteuerung des Schallwandlers – Hardware .............................................................19 3. Ansteuerung des Schallwandlers – Software ..............................................................21 4. Hörbarmachung des erzeugten Klanges......................................................................23
V. Klanganalyse ................................................................................................................24
1. “pizzicato”-Spielweise ...............................................................................................24 2. “arco”-Spielweise ......................................................................................................25
VI. Spielmodi ....................................................................................................................27
1. MIDI-Synthesizer ......................................................................................................27 2. “Lautsprechermodus” ................................................................................................27 3. Autonome Improvisation ...........................................................................................27
VII. Zusammenfassung......................................................................................................28
Appendix A PC-seitige Steuerung......................................................................................29
Appendix B Arduino Firmware..........................................................................................33
Quellenverzeichnis ...............................................................................................................35

Thomas Grill - Elektromagnetische Kammermusik
5
I. Einleitung
“Ich habe Aufnahmegeräte und Tonbandmaterial stets auch als Musikinstrumente betrachtet … Dabei bin ich, ähnlich wie bei konventionellen Instrumenten, voll des Respekts und zugleich ziemlich respektlos. Ich glaube, daß man einen hohen Grad an Komplizität mit der Technik erreichen muß. Komplize heißt hier, immer bereit sein, nach Umwegen zu suchen, die in der Bedienungsanleitung des Gerätes nicht erwähnt, nicht empfohlen oder schlicht nicht erlaubt sind.” (Maurizio Kagel in [28])
Als ich in den späten 1980er-Jahren die Klangwelt elektronischer Instrumente zu entdecken begann, war der Personal Computer erschwinglich geworden und erlaubte, mittels selbstgebauter Schaltungen über normierte Schnittstellen die frei transformier-, weil programmierbare Innenwelt des Rechners mit der “richtigen” akustischen Welt in Kontakt zu bringen. Über einfache externe Wandlermodule gelang es auch ohne große finanzielle Investitionen Klang aufzunehmen, zu bearbeiten und wieder abzuspielen.
Die Vernetzung von virtueller und realer Welt ist in der Zwischenzeit, genauso wie die Audiofähigkeit jedes beliebigen Personal Computers zu einer Selbstverständlichkeit geworden. Softwarepakete vieler Hersteller ermöglichen ohne tiefergehendes Vorwissen Tonaufnahme, –schnitt, –effektierung und –mischung, wie sogar Livebearbeitung und Improvisation mit synthetisierten oder konkreten (gesampelten) Klängen [30]. Die Aufbruchstimmung der 1990er-Jahre (siehe z.B. phonotaktik-Festival 1995/1999, [31]), wo, quasi anknüpfend an Luigi Russolos “intonarumori” von 1913 [49], der Hunger der Hörer nach dem neuartigen, unverbrauchten Klang durch eine Auslotung der Extreme des Mach- und Hörbaren gestillt wurde, ist verflogen. Das elektronische Instrumentarium hat die magische Aura des Neuartigen verloren und ist auf das zurückgeworfen, was es ist: ein vielseitiges Hilfsmittel zur Klangerzeugung, das genau so intensiv erforscht und “geübt” werden muss wie jedes andere Musikinstrument.
Die Aufführung von elektronischer Musik ist von diesem Paradigmenwechsel zumindest ebenso stark betroffen wie der erzeugte Klang selbst. Während ein akustisches Musikinstrument (bzw. davon abgeleitete Interfaces, wie das Synthesizer-Keyboard) spezialisiert genug und bereits im Allgemeinwissen verankert ista, dass es dem Publikum gelingt, spieltechnische Aktionen des ausführenden Musikers klanglich nachvollziehen zu können, ist dies bei einem elektronischen Instrument selten der Fall. Bei reiner Lautsprechermusik wird daher konsequenterweise auch von “unsichtbarer Musik” gesprochen [16]. Beim für beliebige, überwiegend nichtmusikalische Aufgabenstellungen konstruierten Personal Computer bzw. Laptop als Instrumentarium “bleiben die Aktionen des Musikers selbst für Fachleute oft undurchschaubar” ([57], S.7)b. Das Agieren vor (bzw. hinter) dem Bildschirm an Maus und Tastatur hat nicht nur die Anmutung einer Alltagstätigkeit. Körperliche Expressivität wäre unter Umständen sogar kontraproduktiv und würde zu Kontrollverlust bzw. zur Zerstörung der sensiblen Apparatur führen. Das latente Misstrauen gegenüber dem Akteur, dass auf der Bühne nichts Essentielles ad hoc geschaffen, sondern nur Vorbereitetes quasi-automatisch abgespielt wird, kann oft (und mitunter zurecht) nicht leicht
a Die Bezugnahme gelingt mühelos durch die vertraute, selbstverständliche Anwesenheit außermusikalischer mechanischer Klangquellen. b Andererseits kann das Fehlen der visuellen bzw. gestischen zu besserer Konzentration auf die akustische Komponente verhelfen, insbesondere bei purer Lautsprechermusik, die nicht notwendigerweise mit gestischer Aktion verknüpft ist. Die Neugierde des Hörers auf die Entstehungsweise der Musik kann jedoch nicht gänzlich ignoriert werden.
Thomas Grill - Elektromagnetische Kammermusik
6
entkräftet werden. Viele neue Interface-Systeme (siehe z.B. [53], [43]) sind hier in den vergangenen Jahren und Jahrzehnten entwickelt worden, die die Interaktion mit dem Rechner intuitiver und performancetauglicher machen sollen, wenn auch erst in jüngster Zeit flexible, für viele Aufgabenstellungen anpassbare Systeme hinzugekommen sind (z.B. [25], [27]).
Der (rein) elektronische Musiker ist zudem damit konfrontiert, dass sein Instrumentarium den Makel des “technischen Equipments” trägt, was ihn leicht von der Rolle des künstlerisch agierenden Instrumentalisten weg in die Nähe der dienstleistenden Tontechnik rückt. Die mögliche Abstraktheit bzw. Unvertrautheit der Klänge und die Schallwiedergabe über requisitenhafte Lautsprechersysteme trägt dazu weiteres bei. Das zweckmäßige, industrielle Computergehäuse steht im Gegensatz zur Ästhetik und Fetischhaftigkeit anderer Musikinstrumente, wie des Steinway-Flügels, der Fender-Elektrogitarre, der Stradivari-Violine, des Ludwig-Drumkits etc.. Die Pop- bzw. Subkultur hat sich hier eigene Auswege gesucht, den Mangel zum Prinzip erhoben und z.B. durch Nutzung von Spielkonsolen als Musikmaschinen einen neuen Fetisch geschaffen ([40], [17]), dessen klangliche Möglichkeiten allerdings beschränkt bleiben.
Die Diskussion mit dem Komponisten Bernhard Lang im Rahmen des Symposiums zum Festival Wien Modern 2006 hat den Ausschlag gegeben, sich mehr mit der Seite der Klangerzeugung elektroakustischer Musik und der “Gegenständlichkeit” des Klangs zu beschäftigen. Langs Werkserie “Differenz/Wiederholung” greift Sampling- bzw. Looptechniken analog zu digitalen Medien auf, wobei die Repetitionen, in der Partitur präzise notiert, von Instrumentalisten zu exekutieren sind [34]. Auf die Frage, was den Instrumentalisten dabei über den Roboter erhebe, war Langs Antwort sinngemäß, dass das Interessante an den lebenden Musikern sei, dass sie Fehler machen. Dies entspricht der Aussage von Langs Inspirationsquelle, Gilles Deleuzes “Differenz und Wiederholung” [13], wonach es (in der realen Welt) keine Differenz ohne Wiederholung und keine Wiederholung ohne Differenz gibt, “Fehler” also lebensinhärent seien.
Das gegenständliche Projekt versucht elektronisch generierten Klang durch Auslagerung der Klangerzeugung in die Welt außerhalb der “perfekten”, abstrakten, unzugänglichen Maschine greifbar zu machen, ohne jedoch den intimen Bezug zu letzterer zu verleugnen. Als objets trouvés der computertechnischen Welt drängten sich elektromechanische Peripheriegeräte auf, die der Allgemeinheit vertraut sind und durch geeignete Ansteuerung und Mikrofonierung zu Instrumenten werden können. Wie im Abschnitt IV.1 genauer erläutert, fiel die Wahl auf 3,5”-Diskettenlaufwerke unterschiedlicher Fabrikate, in Viereraufstellung.
Es ist nicht das Ziel des Projekts, diese Instrumente perfekt beherrschbar zu machen, sondern technische Notwendigkeiten zu erarbeiten, klangliche Möglichkeiten zu erforschen und Einsatzgebiete abzustecken. Die dabei gewonnenen Erkenntnisse sollten auch auf andere elektronisch steuerbare Maschineninstrumente umlegbar sein.
Thomas Grill - Elektromagnetische Kammermusik
7
II. Bezugspunkte zu existierenden Konzepten
Wie in der Einleitung erläutert, wird dem strukturerzeugenden Rechner klangerzeugende elektromechanische Peripherie an die Seite gestellt, um das akustische Signal zu generieren.
Im folgenden sollen die beiden wesentlichen beteiligten Komponenten, einerseits der Klangkörper und andererseits die Steuerung (das gezielte Spielen) desselben anhand von Referenzen genauer erläutert werden. Auf einen umfassenderen geschichtlicher Überblick wurde verzichtet, um einzelnen Konzepten mehr Augenmerk widmen zu können.
1. Traditionelle Instrumente „Ein Musikinstrument ist ein Gegenstand, der mit dem Ziel konstruiert oder verändert wurde, Musik zu erzeugen. Im Prinzip kann jeder Gegenstand, der Töne oder auch nur Geräusche hervorbringt, als Musikinstrument dienen, jedoch wird der Ausdruck normalerweise nur für solche Gegenstände verwendet, die zu diesem Zweck hergestellt oder verändert wurden.“ [60] Wenn man Übersichtsliteratur zu traditionellen Instrumenten zur Hand nimmt ([8], [14], [62]), kann man sich leicht überzeugen, dass sich über die vergangenen Jahrhunderte ein Kanon an Instrumenten ausgebildet hat, der in jüngerer Zeit kaum durch bedeutende Neuzu-gänge ergänzt wurde. Als „neueres“ Instrument ist hier das Saxofon zu nennen, das um 1840 erfunden wurde. In der Hauptsache wurden vorhandene Instrumente angepasst (z.B. Klappen-system der Querflöte oder Klaviermechanik) oder für elektrische Verstärkung adaptiert (E-Gitarre), wobei sich die Handhabung bzw. Spielweise nicht fundamental veränderte.
Andererseits wurden im frühen 20. Jahrhundert durch die Möglichkeiten des elektrischen Stroms durchaus eine Vielfalt von neuen Klangerzeugern entwickelt. Davon konnten sich allerdings nur wenige behaupten: „Es lag nicht allein an der mangelnden Funktionstüchtigkeit der Instrumente, daß ihnen eine relativ geringe kompositorische Relevanz beschieden war, ...... Es fehlten Konzeptionen für das Komponieren mit den neuen Klangfarben“ [12]. Instrumente wie das Ondes Martinot oder das Theremin wurden in der Folge eher zur Erzeugung spezieller Effekte verwendet, als, wie es den eigentlichen Absichten ihrer Erfinder entsprochen hätte, als Instrumente zur grundlegenden Erweiterung des Tonsystems.
2. Musikautomaten Der früheste Beleg eines musizierenden Roboters findet sich bereits 1737, als Jacques de Vaucanson seinen „automatischen Flötenspieler“ der Öffentlichkeit präsentierte. Die lebensgroße Figur konnte Flöte und Trommel spielen und besaß ein Repertoire von zwölf Liedern [59]. Als Nebenprodukt der zu dieser Zeit schon weit fortgeschrittenen Uhrmacherskunst entstand wenig später die Spieldose, in ihrer ersten Realisierung im Jahr 1796 als musizierende Taschenuhr des Genfer Uhrmachers Antoine Favre-Salomon [61]. Ein mit Stahlstiften besetzer, sich drehender Zylinder bringt dabei Stahllamellen zum Klingen. Der Zylinder kann als erste Form einer „Notenrolle“ angesehen werden, einer mechanisch lesbaren Partitur zur Steuerung mechanischer Musikinstrumente. Unterschiedliche Ausführungen solcher Notenrollen (später meist aus gelochtem Papier, vgl. Lochkarten!) wurden und werden in Pianolas, Orchestrien, Drehorgeln und verwandten Instrumenten eingesetzt.

Thomas Grill - Elektromagnetische Kammermusik
8
Eine spezielle Form dieser Musikautomaten stellen die automatischen Klaviere (oder „Pianolas“) dar, die gestanzte Notenrollen auf pneumatisch-mechanischem Wege auslesen und auf ihre Spielmechanik übertragen können. Während sogenannte „Reproduktions-klaviere“ benutzt wurden, um das aufgezeichnete Spiel bekannter Pianisten inklusive der Dynamik getreu zu reproduzieren, wurden Pianolas ab Mitte der 1890er-Jahre ausdrücklich für Rollen entwickelt, die keine originale Klavieraufführung als Grundlage hatten.
Etliche Komponisten nutzten die Möglichkeit, damit Klaviermusik zu schaffen, die für nicht für einen menschlichen Spieler gedacht war (und für einen solchen unter Umständen unaufführbar wäre), unter anderem Paul Hindemith, Igor Stravinsky und George Antheil. Letzterer sah in der Erstversion seines „Ballet mécanique“ von 1924 (der Begleitmusik zu einem abstrakten Film von Fernand Léger und Dudley Murphy) nicht weniger als 16 synchronisierte Player-Pianos neben Flugzeugpropellern, Sirene, verschiedenen Schlaginstru-menten und zwei konventiellen Klavieren vor. Schwierigkeiten u.a. bei der Synchronisation der Pianos zwangen ihn zu Neufassungen, mit einer Reduktion auf letztlich zwei Pianolas.
In besonderem Maße erwähnenswert ist der amerikanisch-mexikanische Komponist Conlon Nancarrow. Er beschäftigte sich während des Großteils seines Lebens, im Zeitraum von 1948 bis 1992, mit der äußerst langwierigen Produktion von ingesamt 51 „studies for player piano“. Diese sind besonders von irrwitzig schnellen Läufen und Sprüngen, sowie der Gleichzeitig-keit verschiedener Tempi geprägt (siehe [46]) und verkörpern durch ihren artifiziellen Gestus „Maschinenmusik“ in Reinform.
Nancarrows Notenrollen wurden mittlerweile (ebenso wie die Werke vieler anderer Komponisten) digitalisiert und im MIDI-Format [41] oder höher auflösenden Musik-Beschreibungssprachen archiviert. Sie sind daher auch auf den modernen, computer-gesteuerten Äquivalenten der Reproduktionsklaviere abspielbar.
In jüngster Zeit werden die Möglichkeiten der Spektralanalyse und deren maschinelle Übertragung auf das logarithmische Frequenzraster der 88 Klaviertasten in der Kompositions-serie „Quadraturen III (Wirklichkeit)“ von Peter Ablinger [1] genutzt. Wie der Titel andeutet, werden Teile der klanglichen Wirklichkeit „fotorealistisch“ in Echtzeit auf das Klavier übertragen. Nicht-Klavierstücke können so auf dem Klavier erklingen, unter anderem Straßenlärm, Nachrichtensendungen etc..
3. Instrumente abseits des “reinen” Klangs „In antiquity, life was nothing but silence. Noise was really not born before the 19th century, with the advent of machinery. Today noise reigns supreme over human sensibility. For several centuries, life went on silently, or mutedly. The loudest noises were neither intense, nor prolonged nor varied. In fact, nature is normally silent, except for storms, hurricanes, avalanches, cascades and some exceptional telluric movements. This is why man was thoroughly amazed by the first sounds he obtained out of a hole in reeds or a stretched string.“ [49].
In seinem Manifest „L’Arte dei rumori“ beschreibt der Maler und Futurist Luigi Russolo seinen Wunsch nach einer Erweiterung des musikalischen Klangspektrums analog zur Durch-dringung der Welt mit maschinellen Geräuschen: „... our ears far from being satisfied, keep asking for bigger acoustic sensations. However, musical sound is too restricted in the variety and the quality of its tones. ... We must break at all cost from this restrictive circle of pure
Thomas Grill - Elektromagnetische Kammermusik
9
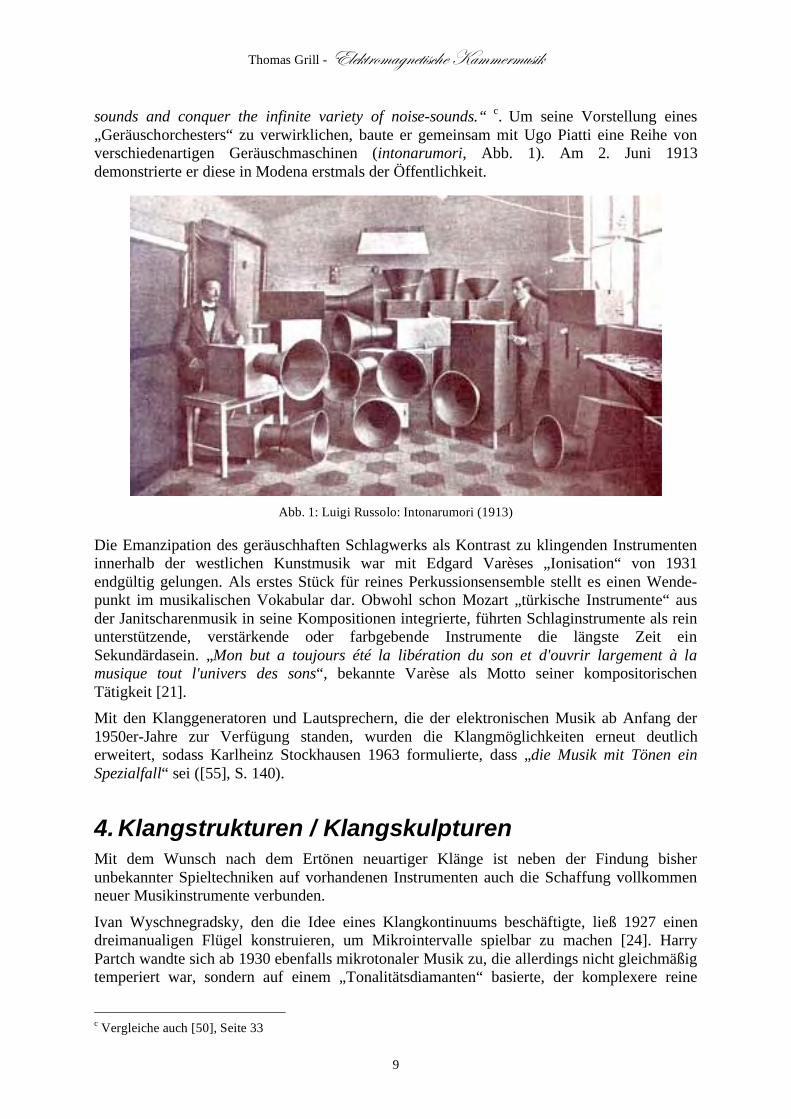
sounds and conquer the infinite variety of noise-sounds.“ c. Um seine Vorstellung eines „Geräuschorchesters“ zu verwirklichen, baute er gemeinsam mit Ugo Piatti eine Reihe von verschiedenartigen Geräuschmaschinen (intonarumori, Abb. 1). Am 2. Juni 1913 demonstrierte er diese in Modena erstmals der Öffentlichkeit.
Abb. 1: Luigi Russolo: Intonarumori (1913)
Die Emanzipation des geräuschhaften Schlagwerks als Kontrast zu klingenden Instrumenten innerhalb der westlichen Kunstmusik war mit Edgard Varèses „Ionisation“ von 1931 endgültig gelungen. Als erstes Stück für reines Perkussionsensemble stellt es einen Wende-punkt im musikalischen Vokabular dar. Obwohl schon Mozart „türkische Instrumente“ aus der Janitscharenmusik in seine Kompositionen integrierte, führten Schlaginstrumente als rein unterstützende, verstärkende oder farbgebende Instrumente die längste Zeit ein Sekundärdasein. „Mon but a toujours été la libération du son et d'ouvrir largement à la musique tout l'univers des sons“, bekannte Varèse als Motto seiner kompositorischen Tätigkeit [21].
Mit den Klanggeneratoren und Lautsprechern, die der elektronischen Musik ab Anfang der 1950er-Jahre zur Verfügung standen, wurden die Klangmöglichkeiten erneut deutlich erweitert, sodass Karlheinz Stockhausen 1963 formulierte, dass „die Musik mit Tönen ein Spezialfall“ sei ([55], S. 140).
4. Klangstrukturen / Klangskulpturen Mit dem Wunsch nach dem Ertönen neuartiger Klänge ist neben der Findung bisher unbekannter Spieltechniken auf vorhandenen Instrumenten auch die Schaffung vollkommen neuer Musikinstrumente verbunden.
Ivan Wyschnegradsky, den die Idee eines Klangkontinuums beschäftigte, ließ 1927 einen dreimanualigen Flügel konstruieren, um Mikrointervalle spielbar zu machen [24]. Harry Partch wandte sich ab 1930 ebenfalls mikrotonaler Musik zu, die allerdings nicht gleichmäßig temperiert war, sondern auf einem „Tonalitätsdiamanten“ basierte, der komplexere reine
c Vergleiche auch [50], Seite 33

Thomas Grill - Elektromagnetische Kammermusik
10
Stimmungen beschrieb. Für das resultierende 43-teilige Tonsystem adaptierte er vorhandene Instrumente, oder baute neue, wie den Bloboy, das Chromelodeon, die Spoils of War u.v.a. [44].
Die Brüder François und Bernard Baschet beschäftigten sich ab 1952 intensiv zuerst mit den Voraussetzungen und später mit dem tatsächlichen Bau von zwei Typen von Objekten: „sculptures sonores“ und „structures sonores“. Erstere waren für Museen und Galerien bestimmt, wobei mehr Augenmerk auf visuelle Qualitäten gelegt wurde, zweitere hingegen für Musiker und in akustischer Hinsicht optimiert. Nach dem Prinzip eines Metallbaukastens (Meccano) wurden die „structures sonores“ aus austauschbaren Modulen (Glasstäbe, Saiten, Metalltrichter etc.) konstruiert, wobei jede mögliche Kombination dieser Teile in einem unterschiedlichen Klangcharakter resultiert [4]. Dabei „... wird klar, dass Objekt, Funktion, Visuelles und Akustisches bei einem Musikinstrument eine Einheit bilden. Von den optischen Formen kann allerdings nicht unmittelbar auf den Klang geschlossen werden. ... [Die Brüder Baschet] ... haben die Frage nach der Übereinstimmung von Bild und Klang als unlösbar zurückgewiesen mit der Bemerkung: ‚Auf Apfelbäumen wachsen eben Äpfel’. Der Satz ist nicht besonders interpretationsbedürftig: Denn Äpfel und Apfelbäume haben kein gemeinsames Aussehen“ ([11], p.39)
Die Erzeugung von Klang durch vibrierende Oberflächen, daher die ursächliche Verbindung von Objekt und akustischem Signal, lässt die Grenzen zwischen Skulptur und Musik-instrument, also auch Musik und bildender Kunst, leicht verschwinden. Einer der Pioniere des Klangobjekts, Jean Tinguely, bezeichnete folgerichtig seine Ausstellung „Mes étoiles" 1958 als ein „Concert pour sept peintures". Die ausgestellten Reliefs wurden durch die Besucher per Knopfdruck zum Klingen gebracht, womit es dem Künstler gelang, „die Distanz zwischen Betrachter und Kunstwerk durch die Verschränkung von visuellen und akustischen Reizen quasi aufzuheben." [42]
Die Klangmaschinen von Martin Riches werden ebenfalls sowohl im Konzert- als auch Installationskontext eingesetzt. Die Funktionsweise seiner "Flute Playing Machine" von 1979, einer notenrollen-gesteuerten selbstspielenden Altflöte kann vom Publikum leicht nachvoll-zogen werden. Trotz komplexer Computersteuerung nicht weniger einleuchtend ist die sprechende "Talking Machine" (1989-91, Abb. 2), deren 32 speziell geformte Orgelpfeifen jeweils ein Phonem der menschlichen Sprache wiedergeben können. [3]
Abb. 2: Martin Riches "Talking Machine" [3]

Thomas Grill - Elektromagnetische Kammermusik
11
Die Maschinen von Nicolas Anatol Baginsky wiederum zeichnet eine bisher ungekannte Autonomie und Lebendigkeit trotz Selfmade-Bauweise aus: „In Baginskys Maschinen wird die Künstlichkeit der Laboratorien künstlerisch erarbeitet. Er erbt aus der Tradition der Wissenschaftler und der Automatenbauer die Frage, was den Menschen auszeichnet und gibt hierauf als Künstler Antworten. Menschen sind nicht perfekte berechenbare Wesen, und Menschlichkeit beginnt dort, wo man sich auf die Frage, was der Mensch ist, einläßt. Baginsky läßt sich darauf ein, indem er unbequemen und wunderlichen Gewohnheiten durch Maschinenbewegungen Ausdruck verleiht.“ [39]. Sowohl die „Flamenco Machines“ (1989-2005) [5], Flamenco-steppende Roboter unterschiedlichster Größe, wie auch „The Three Sirens - A self learning robotic rock band“ (1992-2001, Abb. 3) [6], bestehend aus Gitarren-, E-Bass- und Trommelroboter tragen verblüffend menschliche („musikantische“) Züge trotz relativ einfacher Steuerungsmechanismen.
Abb. 3: Nicolas Anatol Baginsky "The Three Sirens" [6]
Baginskys „Aglaopheme“ genannter Gitarrenroboter hat mit dem „Guitarbot“ [51] aus der LEMUR („League of Electronic Musical Urban Robots“) genannten Serie einen Bruder erhalten. LEMUR ist eine Reihe von mittlerweile mehr als 50 verschiedenartigsten Musikrobotern, die unter der Projektleitung von Eric Singer ab dem Jahr 2000 entstanden sind (Abb. 4). „... LEMUR creates exotic, sculptural musical instruments which integrate robotic technology. LEMUR's philosophy is to build robots that are new types of musical instruments, as opposed to animatronic robots that play existing instruments.“ [36]. Im Unterschied zu Baginskys autonomen Robotern sind die LEMURen ohne steuernden Computer nicht funktionsfähig. Im Wesentlichen entsprechen sie avancierten MIDI-Instrumenten (siehe Kapitel 6), die die Klänge physisch synthetisieren, und daher im Unterschied zu “leblosem” Instrumenten-Sampling immer ein wenig anders klingen.
Abb. 4: LEMUR [36]

Thomas Grill - Elektromagnetische Kammermusik
12
Den Brückenschlag zur alltäglichen (Konsum-)Welt stellen die „Produkte“ des japanischen Künstlerkollektivs Maywa Denki her, die neben vielem anderen auch Musikinstrumente umfassen: „Tsukuba music is designed to stir people’s attention to notice the fact, ‚the live musical sound is created from a substance’, which the music once used to be in years past and they had totally forgotten. Tsukuba Series is played by the movement of motors and / or electromagnets at 100V and makes a sound by practically beating/knocking a substance. It is a challenge to revive a live music sound with the power of machines." Es handelt sich um Nonsens-Instrumente (siehe Abb. 5), die sich drei wesentliche Grundmerkmale teilen: “1. Run by 100 Voltage. 2. Make sounds without speakers. (Acoustic Instruments) 3. Ridiculous play style.” [37]. Die ”Produktpräsentationen” genannten Live-Performances oder Ausstellungen haben einen entsprechend eigenwilligen Charakter.
Abb. 5: Maywa Denki "Tsukuba Series" [37]
5. Der Computer als Klangobjekt Nachdem Computerhardware ihren Einzug in die Musik gefunden hat, und kaum modifizierte, bürokompatible Personal Computer mittlerweile zu einem überwiegenden Teil für die Realisierung von elektronischer Musik bzw. Postproduktion jedweder anderer auf Tonträgern erhältlicher Musik genutzt werden, erscheint es nur folgerichtig dass Künstler begannen, diese Hardware auch auf ihre direkten, körperklanglichen Eigenschaften hin zu untersuchen und die programmierbare Steuerungslogik auf das Gerät selbst klangerzeugend anzuwenden. Damit wird der Computer (bzw. Teile davon) selbst zu einer Klangskulptur.
Eine entsprechende, oft referenzierte Arbeit ist die „Symphony for Dot Matrix Printers“ des Künstlerduos „The User“ aus dem Jahr 1998, bei der ein vernetztes Rechnersystem eine Anzahl von Nadeldruckern ansteuert und also „spielt“: „Each of the printers plays from a different 'part' comprised of rhythms and pitches made up of letters of the alphabet, punctuation marks and other characters. [The User] uses ASCII textfiles to compose,

Thomas Grill - Elektromagnetische Kammermusik
13
orchestrate, and synchronize sonorous and densely textured, rhythmically-driven music“ [38]. Die dabei entstehenden Anfahr- und Schrittbewegungen, sowie das kreischende Druckgeräusch werden verstärkt und mit projizierten Live-Videoaufnahmen von Details der Druckvorgänge ergänzt (Abb. 6).
Abb. 6: The User "Symphony for Dot Matrix Printers" [38]
Die zeitgemäße digitale Klangaufzeichnung kommt nicht ohne entsprechend hochkapazitive Speichermedien aus, weshalb sich der Ausdruck „Harddisk Recording“ etabliert hat. Harddisks sind die omnipräsenten Datenspeicher der heutigen Zeit, die das digitale Welt-wissen am Arbeitsplatz oder auf Servern im Internet abrufbereit halten. Die spezielle Bedeutung von Festplatten für die rhythmusbasierte und noise-orientierte elektronische Musik wird in der Klangskulptur „Harddisko“ (2004, Abb. 7) von Valentina Vuksic illustriert. Ein Orchester von 16 defekten, geöffneten Festplatten verschiedener Typen erwacht hier zu einer Art zombiehaftem Eigenleben: „As soon as a drive recieves power, it conducts an initia-lization procedure with the heads moving in a specific pattern and generating sounds. These patterns vary throughout different manufactors, models, production series, firmware versions and the disk's history“ [66]. Die Festplattenbewegungen werden also nicht bewusst gesteuert, sondern lediglich über intervallgeschaltete Netzteile getriggert – die verschiedenen einge-bauten Minimalprogramme der einzelnen Harddisks bestimmen den hörbaren Ensembleklang.
Abb. 7: Valentina Vuksic "Harddisko" [66]

Thomas Grill - Elektromagnetische Kammermusik
14
Völlig ohne das Herausstellen einzelner klanggebender Hardwarebestandteile kommt Tilman Küntzel in seiner Installation „Wie Musik in meinen Ohren“ von 2005 aus. Ein durch Skripts (also einfache Programme auf Betriebsystemebene) gesteuerter, unmodifizierter Apple MacIntosh SE von 1989 wird als Klangstele in den Raum gestellt, mit der lapidaren Erläuterung: „Automatisierter Verlauf von Rechenleistungen gesteuert durch Befehle und sonifiziert durch Mikrophonierung“ ([32], Abb. 8).
Abb. 8: Tilman Küntzel "Wie Musik in meinen Ohren" [32]
6. Der Computer als Klanggenerator Im Unterschied zu dem im vorangegangenen Kapitel beschriebenem Einsatz von Computerhardware als klangerzeugende Strukturen, wird unter dem Computer als Klangerzeuger natürlich vornehmlich seine Rolle als Steuerungselement für Klangerzeugung durch Software-Instrumente, also diverse Sampling-Verfahren (mit konkretem Klangmaterial als Grundlage) bzw. durch eine Vielzahl an Synthese-Verfahren verstanden. Im Wesentlichen kann man eine Trennung in die Bereiche Strukturgenerierung (resultierend in Steuerungsinformationen) und Klangsynthese (Generierung von tatsächlichem Klang aus Steuerungsinformationen) vornehmen, wobei die Grenze dazwischen unscharf ist.
Da Klangsynthese durch die relativ hohe Zeitauflösung digitaler Audioinformation rechenaufwändig ist und entsprechender Schallwandler bedarf, wurde die Strukturgenerierung wesentlich früher verwendet. Kanons (ab dem 13. Jhdt.) und Fugen (ab dem Barock) können ohne weiteres als algorithmische Kompositionen bezeichnet werden. Als eine der ersten ad-hoc generierten aleatorischen Kompositionen schuf W.A. Mozart 1787 das „musikalische Würfelspiel“ mit dem erklärenden Untertitel: „Walzer oder Schleifer mit zwei Würfeln zu componieren ohne musikalisch zu seyn noch von der Composition etwas zu verstehen“ [22]. Die erste algorithmische, selbstspielende Musikmaschine, eine Art Orchestrion das mittels eines Pseudo-Zufallszahlengenerators quasi-improvisierend aus kurzen Motiven immer neue Musikstücke zusammensetzen konnte, war das „Componium“ von Dietrich Nikolaus Winkel, entstanden 1821 (siehe [64]).
Als Pioniere der kompositorischen Verwendung des digitalen Computers verwendeten Lejaren Hiller und Iannis Xenakis unabhängig voneinander erste computergenerierte musikalische Strukturen als Grundlage für Streichquartette: „1956 unternahmen Lejaren
Thomas Grill - Elektromagnetische Kammermusik
15
Hiller und Leonard Isaacson das erste Experiment, musikalische Entscheidungsprozesse des Menschen im Computer nachzubilden, indem sie den Großcomputer ILLIAC 1 eine viersätzige Partitur für Streichquartett synthetisieren ließen, die »Illiac Suite«. Die ersten drei Sätze basierten auf Formalisierungen herkömmlicher Kompositionsregeln (einfache Mehrstimmigkeit, Kontrapunkt, serielle Reihentechniken), der vierte Satz aber auf dem mathematischen Prinzip der so genannten »Markow-Ketten«“ [15]. Einen größeren Entfernungsgrad von menschenentworfener Musik strebte Iannis Xenakis an, der eine Reihe von Kompositionen mit Hilfe eines einzelnen FORTRAN-Computerprogramms (ST – Stochastic Music) berechnen ließ, die einzelnen Stücke (z.B. ST/4-1 080262 von 1962) also spezielle Ausformungen eines größeren Prinzips darstellen [29]. Xenakis musste aber bei der Transkription der generierten Zahlenkolonnen in eine von Musikern spielbare Partitur dennoch kompositorische Entscheidungen treffen, was nicht seiner ursprünglichen Idee von „purer“ Komposition entsprach: „... it is, however, necessary to jump to the stage of pure composition by coupling a digital-to-analog converter to the computer. The numerical calculations would then be changed into sound, whose internal organization had been conceived beforehand“ ([67], S.144).
Die erste direkte Synthese von Klängen, also die Berechnung von Wellenformen aus Steuerungsdaten, wurde erstmals 1957 von Max Matthews in den Bell Telephone Laboratories durchgeführt, wobei die Klänge mangels ausreichender Rechenleistung zunächst berechnet, im Speicher zwischenzeitlich abgelegt und erst danach über einen Digital-Analogwandler in Tonsignale umgewandelt wurden. Zur Generierung dieser Klänge im Speicher entstand unter der Leitung von Matthews die Familie der MUSIC-Musikprogramme, deren Ideen Anfang der 1970er-Jahre von Barry Vercoe in Csound übernommen wurden. ([48], S.287-290). Im Laufe der Zeit wurden viele verschiedene Synthese-Verfahren zur direkten Klangerzeugung entwickelt (FM-Synthese, Waveshaping, Granularsynthese, Physical Modeling etc.), die komplexe, über die Zeit veränderliche Klänge mittels einer überschaubaren Anzahl von steuerbaren Parametern erzeugen können.
Einen anderen Ansatz verfolgt das Sound-Sampling, bei dem konkrete (also zuvor aufgezeichnete) Klänge als Grundlage des Synthesevorgangs verwendet werden. Sampler als MIDI-Expander-Hardware bzw. zunehmend Software-Plugins sind in Verbindung mit ausgefeilten Klangbibliotheken immer besser in der Lage, den Klang echter Instrumente nachzubilden. Dies kulminiert in dem „Vienna Symphonic Library“ genannten ambitionierten Projekt, das den Anspruch erhebt, den Klang von Einzelinstrumenten oder Ensembles perfekt reproduzieren zu können: “Die Vienna Symphonic Library kennzeichnet den Beginn einer bahnbrechenden Entwicklung in der Produktion virtueller Orchestersounds. … So wird Arrangeuren und Musikproduzenten einfaches, rasches und intuitives Spiel bei absolut authentischen Ergebnissen ermöglicht.” [65]. Auf den eigenwilligen, fehleranfälligen und teuren Instrumentalisten soll demgemäß verzichtet werden können.

Thomas Grill - Elektromagnetische Kammermusik
16
III. Positionierung des gegenständlichen Projekts in Bezug auf existierende Konzepte
„You can play a shoestring if you're sincere“ (John Coltrane) Die Beziehungen zwischen Musikinstrumentd und Klangskulptur, wie auch den Zusammen-hang zwischen Ausführung und Inszenierung von Musik empfand ich immer schon als spannende und oft übersehene Aspekte des Musikschaffens allgemein. Der Kanon an Musikinstrumenten, Besetzungen und Aufführungsriten, der in der E- wie auch U-Musik über die Zeit entstanden ist und weitergepflegt wird, übt eine enorme normative Kraft aus, woraus sich aber auch ein großes Potential an Reibungsmöglichkeiten bei experimenteller An-näherung an diese Bereiche ergibt.
Um die Begriffe Musikinstrument und Klangskulptur in der gegenständlichen Arbeit zusammenzuführen, schien es zielführend, den virtuosen Instrumentalisten als Dominator seines Instruments vollständig aus dem Spiel zu lassen, und statt dessen den Instrumenten ein emanzipierendes „Eigenleben“ zu verschaffen. Und obwohl die gewählten Disketten-laufwerke als klangerzeugende Objekte aus einem absolut musikfernen Bereich stammen, soll die Wahrnehmung als Musikinstrument dennoch nahe liegen. Die entsprechende Beeinflussung des Betrachters gelingt mittels des Konzepts von Andrew Blakes „retrolutionary device“, das eine Verbindung zwischem Vertrautem und Neuem herstellt: “Either the old is remodeled so that it can contain the new, or the new is represented as old or traditional“ [7]. Der an Streichinstrumente erinnernde Klangcharakter der Laufwerke und deren Aufstellung als Quartett in Halbkreisform sind geeignet, eindeutige Assoziationen an die musikalische Gattung des klassischen Streichquartetts zu wecken.
Dem gegenüber steht die ungeschönte Optik des technischen Peripheriegeräts. So betrachtet ist es nichts mehr als eine verhältnismäßig primitive Prothese, dem steuernden Computer zu klanglichem Ausdruck zu verhelfen. Aber was man sieht, sind auch Geräte, die man als solche nicht mehr erklären muss, mit denen man höchstwahrscheinlich bereits interagiert hat, denen möglicherweise persönliche, wichtige, kostbare Daten anvertraut wurden und deren wohlbekannte Funktionalität hier in einem neuen Sinnzusammenhang verwendet/ entwendet/ entfremdet wird: „Technology is not hidden, its function is visible and easy to understand, while it still brings about a sense of wonder.“ [33].
Die Rekontextualisierung des verwendeten Klanggeräts von seiner angestammten in eine neue Umgebung legt nahe, die Eignung genau zu prüfen oder aber alternativ neue Techniken und Strategien zu entwickeln, die es in einem musikalischen Sinn bedienbar und hörbar machen. Entscheidende Aspekte sind hier die Kultivierung eines charakteristischen klanglichen Ausdrucks und der bewusste Umgang mit Eigenheiten oder Fehlerquellen des Geräts. Denn, wie schon in der Einleitung erläutert wurde: Das Interessante ist, dass Fehler und Störungen auftreten, es sich also um etwas Lebendiges handelt.
d Die Frage was “Musik” und was “Geräusch” oder “Störung” sei, sehe ich in diesem Zusammenhang als gelöst an, durch die hinter dem jeweiligen Einsatz stehende kompositorische bzw. musikantische Absicht.
Thomas Grill - Elektromagnetische Kammermusik
17
IV. Aufbau des Instruments
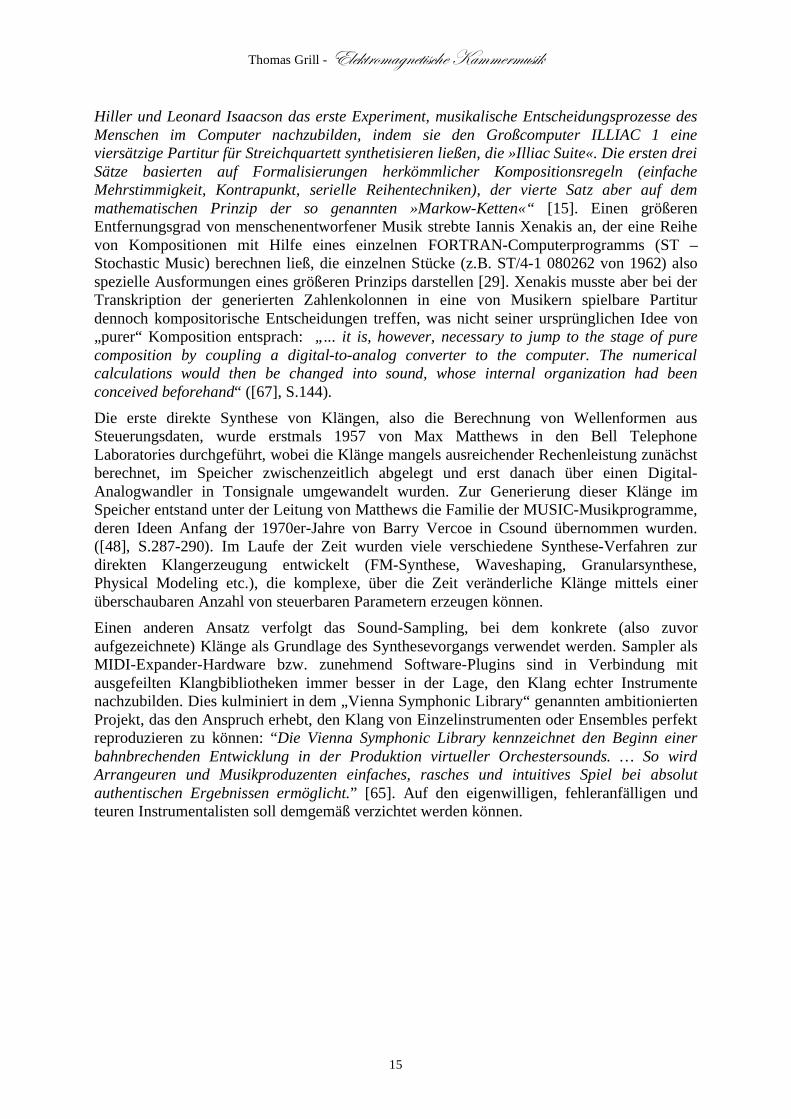
Die „elektromagnetische Kammermusik“ ist ein heterogenes, modulares System, dessen Komponenten nach dem Kriterium leichter Verfügbarkeit ausgewählt wurden und großteils leicht durch Alternativen zu ersetzen sind. Das beschriebene Projekt hat die Erforschung der generellen Machbarkeit bzw. Brauchbarkeit für musikalischen Einsatz zum Ziel, mit dem Fokus auf der Verwendung eines bestimmten Typs von klanggebendem Objekt - dieser ist aber innerhalb des umfassenderen Prinzips leicht durch andere austauschbar.
Abb. 9: Überblick über die beteiligten Komponenten

Thomas Grill - Elektromagnetische Kammermusik
18
1. Der Schallwandler Als schallabstrahlende Körper wurden ausrangierte Diskettenlaufwerke („floppy drives“) gewählt. Bekanntermaßen wurden diese Datenspeicher aufgrund ihrer geringen Kapazität mittlerweile praktisch vollständig von CD-RWs oder Flash-Speichern verdrängt. Es ist kein explizites Ziel, Hardware aus einer vergangenen Ära zu verwenden, allerdings hat die Tatsache dass diese Laufwerke kaum mehr in Verwendung sind den Vorteil, dass sie relativ leicht zu Flohmarktpreisen erhältlich sind. Es spielt auch keine Rolle, ob die Laufwerke als solche einwandfrei funktionieren, da die hier verwendeten elektrischen und mechanischen Komponenten wesentlich unempfindlicher sind als die Steuerungselektronik bzw. der Schreib-Lesekopf. Die kompaktere und relativ standardisierte Bauweise bei gleichzeitig größerer Verbreitung ließ die Wahl auf die neueren 3,5“-Laufwerke fallen (Abb. 10).
Abb. 10: 3,5" Diskettenlaufwerk
Die Mechanik und Elektronik ist in einem stabilen Chassis aus Metallguss oder stärkerem Metallblech untergebracht, das nach oben hin durch einen abnehmbaren Blechdeckel verschlossen ist. Die für den Benutzer zugängliche Vorderseite ist mit einer Plastikabdeckung versehen, durch die die Diskette in das Gerät eingeführt werden kann. Auf der Hinterseite befinden sich die elektrischen Anschlüsse und, ebenfalls meist freiliegend, der Schrittmotor zur Positionierung des Schreib-/Lesekopfes. Letzerer sitzt auf einem Schlitten, der über ein Spindelgetriebe durch die Drehbewegung der Schrittmotorachse horizontal verschoben wird (Abb. 11). An der Unterseite des Gehäuses sitzt, abgesehen von der Steuerungselektronik, mittig noch ein Gleichstrommotor, der eine eingelegte Diskette in Drehung versetzen kann.
Abb. 11: Diskettenlaufwerk in geöffnetem Zustand
Thomas Grill - Elektromagnetische Kammermusik
19
2. Ansteuerung des Schallwandlers – Hardware Üblicherweise wurden und werden Diskettenlaufwerke durch den sogenannten „Floppy Disk Controller“, einem Bestandteil der PC-Hauptplatine, und der im Diskettenlaufwerk eingebauten Elektronik gesteuert. Dabei wird der Spindelmotor ein- und ausgeschaltet, der Schrittmotor zur Positionierung des Schreib-/Lesekopfes gesteuert und die zu lesenden bzw. schreibenden Daten übertragen. Für die gegenständliche Anwendung ist nur die Steuerung des Schrittmotors relevant. Dazu wäre es ohne weiteres möglich, die herkömmlichen Programmierschnittstellen der Controller-Hardware zu nutzen, allerdings ist diese Hardware nur auf die Aufgabe des zuverlässigen Datentransfers ausgelegt, wozu der Schrittmotor immer nur mit einer konstanten Drehgeschwindigkeit verwendet wird, was den bekannt monotonen Klang zur Folge hat. Um andere Umdrehungsgeschwindigkeiten und somit größere klangliche Varianz erzielen zu können, sowie auch unabhängig vom Vorhandensein des Controller-Chips zu sein, wird der Schrittmotor durch externe Elektronik angesteuert.
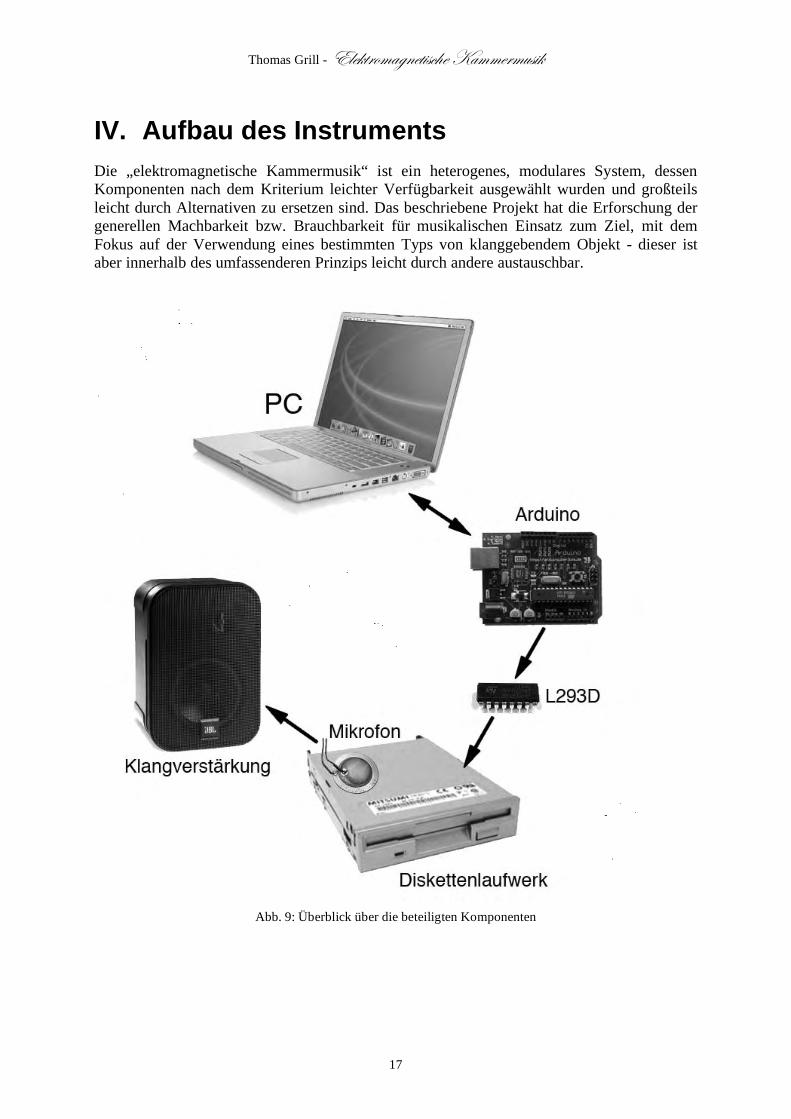
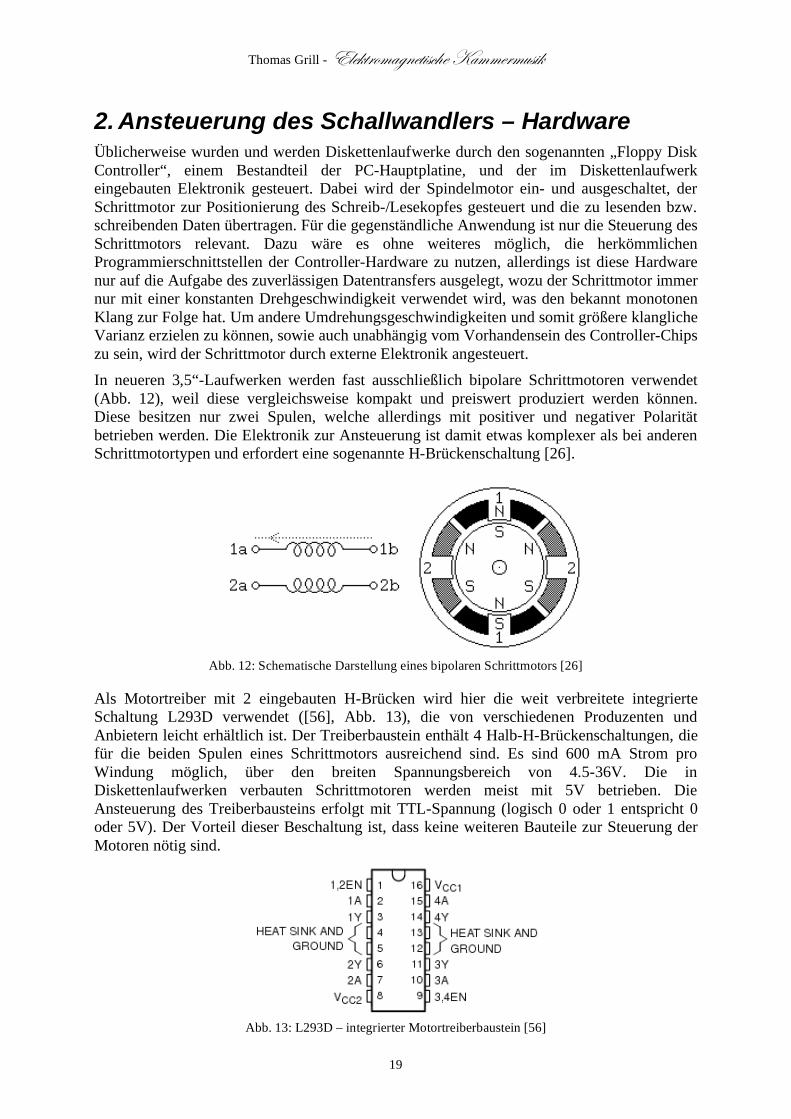
In neueren 3,5“-Laufwerken werden fast ausschließlich bipolare Schrittmotoren verwendet (Abb. 12), weil diese vergleichsweise kompakt und preiswert produziert werden können. Diese besitzen nur zwei Spulen, welche allerdings mit positiver und negativer Polarität betrieben werden. Die Elektronik zur Ansteuerung ist damit etwas komplexer als bei anderen Schrittmotortypen und erfordert eine sogenannte H-Brückenschaltung [26].
Abb. 12: Schematische Darstellung eines bipolaren Schrittmotors [26]
Als Motortreiber mit 2 eingebauten H-Brücken wird hier die weit verbreitete integrierte Schaltung L293D verwendet ([56], Abb. 13), die von verschiedenen Produzenten und Anbietern leicht erhältlich ist. Der Treiberbaustein enthält 4 Halb-H-Brückenschaltungen, die für die beiden Spulen eines Schrittmotors ausreichend sind. Es sind 600 mA Strom pro Windung möglich, über den breiten Spannungsbereich von 4.5-36V. Die in Diskettenlaufwerken verbauten Schrittmotoren werden meist mit 5V betrieben. Die Ansteuerung des Treiberbausteins erfolgt mit TTL-Spannung (logisch 0 oder 1 entspricht 0 oder 5V). Der Vorteil dieser Beschaltung ist, dass keine weiteren Bauteile zur Steuerung der Motoren nötig sind.
Abb. 13: L293D – integrierter Motortreiberbaustein [56]

Thomas Grill - Elektromagnetische Kammermusik
20
Die Schrittmotoren werden mit einer bestimmten Abfolge von Spannungspolaritäten in den Windungen gesteuert, sodass ein Drehmoment auf den magnetbestückten Rotor entsteht und sich die Motorenachse in die gewünschte Richtung dreht (Abb. 14). Von den beiden Möglichkeiten wurde zweitere gewählt, die zwar mehr Leistung verbraucht, allerdings auch ein stärkeres Drehmoment erbringt und damit bei schnellen Start-/Stoppbewegungen zuverlässiger arbeiten sollte. Um die Drehrichtung zu ändern, wird einfach die Abfolge umgekehrt.
Abb. 14: Polaritätsabfolgen zur Steuerung eines bipolaren Schrittmotors [26]
Die Einstellung der Polarität an den Wicklungen erfolgt durch entsprechende TTL-Signale an den Treiberbaustein. Dies wäre beispielsweise leicht über die bis vor kurzem weit verbreitete parallele Druckerschnittstelle möglich, die allerdings in neueren (und vor allem in mobilen) PCs nicht mehr verwendet wird. Obwohl es USB-Parallelport-Konverter gibt, die man stattdessen einsetzen könnte, ist es naheliegender, gleich zum zeitgemäßen, flexiblen und kostengünstigen Quasi-Standard „Arduino“ zu greifen. Arduino-Boards stellen eine programmierbare Schnittstelle vom Computer zu externer Elektronik dar, und verfügen über maximal 13 digitale IO-Kanäle und 6 Analog-Inputs mit 10 Bits Auflösung ([2], Abb. 15). Ein frei programmierbarer Onboard-Prozessor ermöglicht sowohl autarke Operation, wie auch Kommunikation mit einem PC über die omnipräsente USB-Schnittstelle oder drahtlos mittels Bluetooth. Damit stellt Arduino eine überaus kostengünstige Alternative zu bisherigen meist MIDI-basierten Sensorik-Lösungen wie I-CubeX [23] etc. dar.
Abb. 15: Arduino interface board (USB type) [2]
Über ein Arduino-Board können maximal zwei Schrittmotoren gleichzeitig gesteuert werden. Die schnellste Pulsfolge, die von den eingesetzten Schrittmotoren zuverlässig verarbeitbar ist, liegt typischerweise im Bereich von 2-3 ms, wobei das Timing so jitterarm (d.h. so präzise) wie möglich sein sollte um hohe Klangqualität zu erzielen. Dies ist durch direkte Steuerung der digitalen Outputs über den USB-Bus kaum realisierbar, der programmierbare Onboard-
Thomas Grill - Elektromagnetische Kammermusik
21
Prozessor hingegen verfügt über entsprechende Fähigkeiten, die Polaritätsabfolgen selbstständig in steuerbarer Geschwindigkeit zu generieren.
Eine gewisse Herausforderung stellt die zuverlässige Positionierung des Schlittens dar. Die im Diskettenlaufwerk eingebaute Elektronik verfügt zwar über einen Sensor zur Feststellung der Nullposition des Schlittens. Das Anfahren dieser Nullposition, und damit die Verwendung des Sensors ist in der gegenständlichen Anwendung aber nicht ohne weiteres möglich, da dies möglicherweise ein Umweg wäre und jede Bewegung aber unvermeidbar Klang erzeugt. Das Fehlen einer absoluten Positionsinformation als sensorische Rückmeldung erfordert also, dass nach einer anfänglichen Kalibrierung über längere Zeit hinweg so genau wie möglich gezählt und positioniert werden muss. Das setzt besondere Vorkehrungen in der Steuerungs- und Kommunikationslogik voraus. Positionierungsfehler sind im Laufe der Zeit dennoch nicht zu vermeiden.
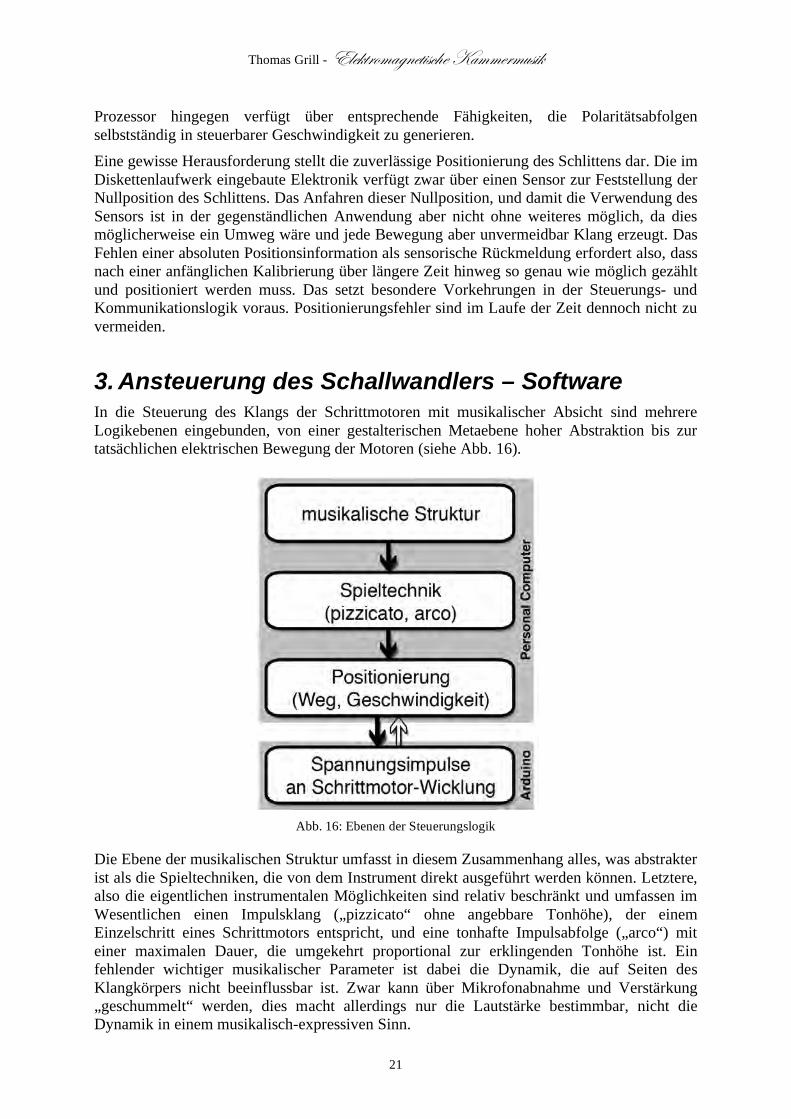
3. Ansteuerung des Schallwandlers – Software In die Steuerung des Klangs der Schrittmotoren mit musikalischer Absicht sind mehrere Logikebenen eingebunden, von einer gestalterischen Metaebene hoher Abstraktion bis zur tatsächlichen elektrischen Bewegung der Motoren (siehe Abb. 16).
Abb. 16: Ebenen der Steuerungslogik
Die Ebene der musikalischen Struktur umfasst in diesem Zusammenhang alles, was abstrakter ist als die Spieltechniken, die von dem Instrument direkt ausgeführt werden können. Letztere, also die eigentlichen instrumentalen Möglichkeiten sind relativ beschränkt und umfassen im Wesentlichen einen Impulsklang („pizzicato“ ohne angebbare Tonhöhe), der einem Einzelschritt eines Schrittmotors entspricht, und eine tonhafte Impulsabfolge („arco“) mit einer maximalen Dauer, die umgekehrt proportional zur erklingenden Tonhöhe ist. Ein fehlender wichtiger musikalischer Parameter ist dabei die Dynamik, die auf Seiten des Klangkörpers nicht beeinflussbar ist. Zwar kann über Mikrofonabnahme und Verstärkung „geschummelt“ werden, dies macht allerdings nur die Lautstärke bestimmbar, nicht die Dynamik in einem musikalisch-expressiven Sinn.

Thomas Grill - Elektromagnetische Kammermusik
22
Um von den atomaren musikalischen Einheiten die klanggebende Positionierung des Schreib-/Lesekopfes ableiten zu können, muss man zunächst eine Beziehung zwischen zu spielender Tonhöhe und der Positionierungsgeschwindigkeit herstellen, und andererseits zwischen Tondauer und Positionierungsweg. Da es einen maximale Positionierungsweg gibt, nämlich von der aktuellen Position des Schlittens zu seinem Anfangs- oder Endpunkt, muss auch entschieden werden, was mit längeren Dauern geschehen soll. Ein klangloses Abheben und Wiederaufsetzen, analog zum Bogen bei Streichinstrumenten ist nicht möglich bzw. nur durch Absenken der Mikrofonverstärkung. Möglich ist auch ein Umkehren der Bewegungsrichtung, analog zum Bogenwechsel, das allerdings einen kontinuierlichen Klang unterbricht.
Wie in Abb. 16 skizziert, werden die drei höherliegenden Ebenen der Logik von der PC-seitigen Steuerung übernommen, während die tatsächliche Umsetzung der Positionierung in die Spannungsignale an die Schrittmotoren vom Arduino-Board realisiert wird. Die Kommunikation zwischen diesen beiden Komponenten erfolgt bidirektional, um etwaige Übertragungsfehler korrigieren zu können.
Die PC-seitige Programmierung wurde vollständig mit Hilfe der visuellen Programmier-umgebung Pure Data [47] entwickelt, weil diese kostenlos, plattformübergreifend und echtzeitfähig ist. Alle benötigten Erweiterungen der Kern-Software (vor allem Erweiterungen zum Zugriff auf die serielle Schnittstelle) sind sowohl in der hier verwendeten, optimierten Distribution vibrez_pure [20], wie auch in der weiter verbreiteten pd-extended-Distribution [54] enthalten. Zur einfachen Implementierung komplexerer Steuerungslogik wurde häufig auf die py/pyext-Erweiterung [19] zurückgegriffen, die auch in den genannten Distributionen enthalten ist und eine Einbindung der Programmiersprache Python [63] innerhalb von Pure Data ermöglicht.
Die Steuerungslogik gliedert sich in zwei Hauptbereiche: Einerseits die Aufbereitung der musikalischen Informationen in eine Positionsinformation für einen bestimmten Ausgabe-Kanal, und zweitens die Kommunikation mit der externen Arduino-Hardware. Letzterer schließt auch die Bewältigung der Kommunikations- und Positionierungslatenz durch einen ständigen Vergleich von Soll- und Ist-Position, sowie den Umgang mit Übertragungsfehlern über die serielle Schnittstelle ein. Die erwünschte feinstufige Klangregelung benötigt die Übertragung relativ hoch aufgelöster Zahleninformationen an das Arduino-Board. Konkret ist erwünscht, die Schrittzeit zwischen ca. 3 und 30 ms regeln zu können, am besten mit s-Auflösung - dazu wären etwas mehr als 15 Bits an Zahleninformation nötig. Außerdem muss neben der Einstellung der Geschwindigkeit auch definierbar sein, welches der beiden Diskettenlaufwerke gemeint ist, und welchen Weg der Schrittmotor zurücklegen soll. Dies erfolgt den Einsatz sogenannter Multi-Byte-Kommandos, um die 8-Bit-Breite der seriellen Datenübertragung zu überwinden. Es werden immer 4 Bytes (32 Bits) für ein Kommando verwendet (Abb. 17), wovon 18 Bits Nutzdaten sind, und die restlichen Datenbits für Checksumme und Resynchronisationsfähigkeit verwendet werden. Der Beginn eines neuen Kommandos (durch einen laufenden Zähler nummeriert) zeichnet sich immer durch Nullen in den beiden niedrigwertigsten Bits aus, dann folgen drei weitere Bytes, deren Dateninhalt durch eine einfache 3-Bit-Prüfsumme kontrolliert werden kann.

Thomas Grill - Elektromagnetische Kammermusik
23
Abb. 17: Format der 4-Byte-Kommandos vom PC zu Arduino
Die Empfängerseite (Appendix B) verifiziert den korrekten Erhalt des Kommandos und bestätigt diesen durch Rücksenden eines Quittierungsbytes. Die Firmware im Prozessor des Arduino-Boards verarbeitet daraufhin die empfangenen Daten, speichert die gewünschte Schrittgeschwindigkeit oder startet die Positionierung eines Schrittmotors. Ist die Positionierung abgeschlossen, sendet die Firmware die Laufwerksnummer 0 oder 1 an den PC, damit dieser gegebenenfalls die nächste Positionierung vornehmen kann. Es wird zu einer beliebigen Zeit höchstens ein Kommando pro Diskettenlaufwerk verarbeitet – das nächste kann erst folgen, wenn das vorherige abgeschlossen ist.
4. Hörbarmachung des erzeugten Klanges
Um das klangliche Potential der „elektromagnetischen Kammermusik“ voll auszuschöpfen bedarf es Mikrofonierung und Lautsprecherverstärkung. Die abnehmbaren Blechabdeckungen der Laufwerke dienen dabei als Resonanzkörper, deren Schwingungen leicht mit Körperschallmikrofonie abzunehmen sind. Im einfachsten Fall verwendet man dazu Piezo-Pickups, die leicht und billig im Eigenbau herstellbar sind ([9], S. 27ff.) und direkt auf die Geräteabdeckung aufgeklebt werden. Über einen Verstärker wird der Klang dann direkt über Lautsprecher wiedergegeben, wobei im idealerweise jedem Diskettenlaufwerk ein Lautsprecher als Ortsverstärkung direkt zugeordnet ist.
Abb. 18: piezoelektrisches Pickup-Mikrofon
Für bestimmte Anwendungen ist es sinnvoll, das Mikrofonsignal wieder zum steuernden Computer zurückzuführen, z.B. um klanggesteuertes interaktives Spiel mehrerer Laufwerke zu realisieren. In diesem Fall wird das Signal über Audiohardware und Klanganalyseverfahren in die Steuerungslogik eingebunden (siehe Kapitel VI.3)

Thomas Grill - Elektromagnetische Kammermusik
24
V. Klanganalyse
Wie bei traditionellen Instrumenten unterscheidet sich der Klang von Diskettenlaufwerken unterschiedlichen Fabrikats. Unterschiedliche Schrittmotoren und unterschiedliche Gehäusebauformen entwickeln in Zusammenhang mit entsprechender Mikrofonierung unterschiedliche Klangcharakteristiken. Es scheint sogar eine Abhängigkeit vom Alter der eingesetzten Laufwerke zu geben: ältere Modelle haben tendentiell eine massivere Bauform mit Gussmetall- statt Blechchassis.
Die leicht erkennbare Ähnlichkeit zur Klangcharakteristik von Streichinstrumenten entsteht mittels der durch eine regelmäßige Abfolge von Einzelpulsen erzeugten und durch die akustischen Eigenschaften des angeregten Klangkörpers gefilterten Wellenform. Im Fall des Streichinstruments ist dies das mikroperiodische Reißen und Abgleiten des kolofonierten Bogens an der leeren oder gegriffenen Saite [52], im Falle des hier behandelten Instruments die regelmäßige Abfolge von Schritten des Steppermotors. Während im ersten Fall die Anregung der Saite über den Steg an den schallabstrahlenden Körper des Streichinstruments weitergegeben wird, erfolgt in zweiterem die Klangübertragung über diverse Materialbrücken von Chassis, Getriebespindel und Lesekopf, die von Modell zu Modell verschieden ausgeführt sind und folglich individuelle Formantcharakteristika bewirken.
In analoger Weise lassen sich wie bei Streichinstrumenten zwei fundamentale Spieltechniken unterscheiden: pizzicato und arco.
1. “pizzicato”-Spielweise Bewegt sich der Schrittmotor nur einen einzigen Schritt weit, so entsteht (analog zur mit dem Finger gezupften Saite) ein impulshafter Klang, etwas dunkler als das deutsche Wort „Tack“.
Abb. 19: Klangspektrum eines einzelnen Stepper-Schrittes in einem Mitsumi-Diskettenlaufwerk
(Samplerate der Klanganalyse: 96kHz)

Thomas Grill - Elektromagnetische Kammermusik
25
Wie in Abb. 19 zu sehen, treten angeregt durch den Einzelimpuls markante Spektrallinien, die Resonanzfrequenzen des Diskettengehäuses zutage. Je nach Gehäuseform ergibt sich auch ein Nachklingen der dominierenden Frequenzanteile bis zu einigen 100ms.
Es besteht kein Klangunterschied zwischen Vor- und Rückwärtsbewegung des Motors, wohl aber zwischen geraden und ungeraden Schritten, was durch die Konstruktion der Motorwicklungen verursacht werden dürfte. Bei jedem zweiten Schritt ist dabei ein subtiler Doppelimpuls vernehmbar.
2. “arco”-Spielweise Wie in Abschnitt IV.3 beschrieben wird der Stepper-Motor mit einer nominellen Schrittzeit zwischen 3 ms und 30 ms angesteuert, was einem Umfang von etwas mehr als drei Oktaven entspricht. „Nominelle“ Schrittzeit bedeutet hier, dass dem Steuerungsprozessor diese Zeit mitgeteilt wird und dieser autonom die Schrittfolge steuert. Bei der Analyse der Klangspektren stellte sich heraus, dass diese Zeitangabe von der tatsächlichen Dauer abweicht und daher kalibriert werden muss. Durch Messungen (Abb. 20) konnte festgestellt werden, dass ein nahezu perfekt zeitkonstanter und linearer Zusammenhang existiert, der sich durch einen zeitlichen Faktor von 1,24 ausdrücken lässt.
Abb. 20: Vergleich von nomineller und tatsächlich gemessener Schrittgeschwindigkeit
Die gemessenen Klangspektren (Abb. 21) passen nach Korrektur der Schrittgeschwindigkeit ebenso gut ins Bild: die gemessene Grundfrequenz entspricht jeweils mit auflösungsbedingten Abweichungen der theoretischen (berechnet aus f=1/t in s-1, mit Schrittgeschwindigkeit t). Wie beim Spektrum des Einzelimpulses sind die Formanten des Klangkörpers ersichtlich, die Vielfache der Grundfrequenz verstärken oder abschwächen. Die Formanten liegen im Fall des exemplarisch vermessenen Mitsumi-Laufwerks bei etwa 270, 450 und 800 Hz.

Thomas Grill - Elektromagnetische Kammermusik
26
Abb. 21: Klangspektren eines Mitsumi-Laufwerkes bei verschiedenen Schrittgeschwindigkeiten
(Samplerate der Klanganalyse: 96kHz)

Thomas Grill - Elektromagnetische Kammermusik
27
VI. Spielmodi
Die im folgenden beschriebenen Möglichkeiten zur klanglichen Steuerung des Instrumentariums sind zur Zeit in einem prototypischen Stadium, dennoch aber geeignet, spieltechnische und klangliche Fähigkeiten auszuloten und die Steuerungslogik zu perfektionieren.
1. MIDI-Synthesizer Das MIDI-Protokoll als standardmäßiges Steuerungsverfahren für Hard- und Softwareinstrumente ist über die MIDI-Anbindung des Pure Data-Systems auch für das hier verwendete Instrumentarium verwendbar. Es ist neben den üblichen Note On und Note Off Befehle auch Pitchbending möglich. Die Dynamik muss allerdings, wie in Abschnitt IV.3 erläutert unberücksichtigt bleiben oder über die Klangverstärkung realisiert werden.
2. “Lautsprechermodus” Durch Spektralanalyse des Eingangssignal und Vergleich mit den Klangspektren der Instrumente ist auch eine Verwendung als Quasi-Lautsprecher, angelehnt an Ablingers „Quadraturen III“ möglich (siehe II.2). Die Reproduktionsqualität ist naturgemäß niedrig. Man kann das Verfahren aber auch im Sinne „abstrakter Klangmalerei“ benutzen, um beliebige digitale Audiosignale zu instrumentalisieren.
3. Autonome Improvisation
Als Ausgangsidee der „elektromagnetischen Kammermusik“ stand im Sinne einer „Uranwendung“ die Realisierung eines autonomen Instrumentalkollektivs, dessen einzelne Mitglieder Klang erzeugen und auf die Mitspieler reagieren können. Die Mechanismen sollten möglichst einfach sein, aber gleichzeitig zu lebendigen und „musikalischen“ Ergebnissen führen. Um den einzelnen Ensemble-Instrumenten das Hören auf ihre Mitspieler beizubringen, wurden gängige Audiosegmentierungstechniken angewendet, basierend auf Impulserkennung und Identifikation der dominierenden Frequenzen des Klangspektrums. Anhand dieser Informationen sind die Instrumente in der Lage zu imitieren, kontrastieren, solieren oder zu ruhen.
Thomas Grill - Elektromagnetische Kammermusik
28
VII. Zusammenfassung
Die vorgestellte „elektromagnetische Kammermusik“ ist keinesfalls „gutes Instrumentarium“ im herkömmlichen Sinne. Die Instrumente erlauben nur wenige Spieltechniken und der erzeugte Klang verfügt über keine große Bandbreite. Dennoch, oder vielleicht gerade deswegen, erlaubt dieses System eine eingehende Untersuchung der involvierten Techniken, eine mechanische Anordnung überhaupt zu einem elektronisch steuerbaren Instrumentarium zu machen, ohne durch einen großen Reichtum an Möglichkeiten geblendet und abgelenkt zu werden.
Es wurde demonstriert, dass mit geringem Materialaufwand durch Standardtechniken des „Hardware Hacking“ und frei verfügbarer Software elektromechanische Instrumente konstruierbar und kontrollierbar sind. Diese sind in einer wesentlich größeren Vielfalt denkbar und machbar, als es hier Thema sein kann.
Aus einem Mangel an Möglichkeiten einen Reichtum des Ausdrucks zu erzeugen erscheint mir persönlich als eines der faszinierendsten Ziele als Komponist und Musiker. Die Auslotung dessen was an Ausgangsmaterial und also Ballast reduziert, aber an Zugänglichkeit und Expressivität gewonnen werden kann, habe ich vor in der weiteren künstlerischen Arbeit zu vertiefen.

Thomas Grill - Elektromagnetische Kammermusik
29
Appendix A PC-seitige Steuerung
Eine ins letzte Detail gehende Erklärung der verwendeten Programme ist aus Platzgründen nicht möglich, aber die verwendete visuelle Programmierumgebung pure data [47] ermöglicht es, durch Abbildung der Patcher-Diagramme eine Idee von der prinzipiellen Funktionsweise zu vermitteln.
Abb. 22: Haupt-Steuerungspatch für ein Schrittmotor-Paar
Der in Abb. 22 gezeigte Patch übernimmt alle Steuerungsfunktionen, um auf zwei Schritt-motor-getriebenen Floppy-Instrumenten jeweils eine Frequenz für eine gewisse Dauer zu spielen. Er besteht aus zwei Abschnitten (stepper1/2), die die Frequenz-Dauern-Paare in Bewegungsanweisungen umwandeln, einem Abschnitt für die Generierung und Verarbeitung des Datentransfers mit dem Arduino-Board (stepper_logic), sowie einem Abschnitt für die Kommunikation mit der seriellen USB-Schnittstelle, an die das Arduino-Board ange-schlossen ist. Der Sub-Patch [pd answer] (Abb. 23) überprüft, ob ein Kommando im Zuge der seriellen Kommunikation verlorengegangen ist, und verlangt im Fall des Falles neuerliches Senden.
Abb. 23: Subpatch zur Kontrolle der korrekten Datenübertragung

Thomas Grill - Elektromagnetische Kammermusik
30
In Abb. 24 ist die im Hauptpatch verwendete Eingangslogik note2move abgebildet, welche die als Frequenz-Dauer-Paare eintreffenden „Noten“ in Bewegungsanweisungen konvertiert. Diese Bewegungsanweisungen werden als Anzahl der Schritte mit einer bestimmten Schrittdauer an die nachgeschalteten Logik-Bausteine übergeben.
Abb. 24: Die note2move abstraction enthält die Logik, um aus einem Frequenz/Dauer-Paar eine
Bewegungsanweisung für den Schrittmotor zu errechnen
Einen wesentlichen Teil dieses Patches stellt die Kalibration dar, obwohl sie auf triviale Weise gelöst ist: Der Schrittmotor wird zuerst „zu weit“ in die positive Richtung bewegt, und dann „zu weit“ in die negative Richtung. „Zu weit“ bedeutet, dass die Bewegung des Lese-kopfschlittens jeweils am Limit anstößt, und der Lesekopf letztendlich am Nullpunkt zu ruhen kommt.
Der komplexere Teil der Logik in den verwendeten Patches wurde nicht mit den in pure data zur Verfügung stehenden Konstrukten, sondern mittels des py/pyext-Externals [19] in der wesentlich flexibleren Programmiersprache Python [63] gelöst. Auf den nächsten beiden Seiten ist im Sinne der Vollständigkeit der entsprechende Programmcode wiedergegeben. Die wichtigsten Bestandteile davon sind die Klassen send, posctrl und move, die in den Patches innerhalb von [pyx]-Objekten verwendet werden.

Thomas Grill - Elektromagnetische Kammermusik
31
'''stepper.py – Thomas Grill (C) 2007''' import pyext def encode(index,value): value = int(value) c0 = value>>12 c1 = (value>>6)&63 c2 = value&63 chk = (c0^(c1<<2))^(c2<<4) chk = (chk>>6)^(chk&63) chk = (chk>>3)^(chk&7) return (((chk<<3)+(index&7))*4+0,c0*4+1,c1*4+2,c2*4+3) class Stepper: '''Represents one of the steppers''' def __init__(self,dev): self.dev = dev self.speed = 0 self.pos = 0 def __call__(self,move,speed): r = [] if self.speed != speed: # encode speed self.speed = speed r.append(max(min(speed,30000),0)*2+1) if move: # encode move self.pos += move r.append((max(min(abs(move),200),0)*2+int(move < 0))*2+0) return map(lambda x: x*2+self.dev,r) class send(pyext._class): def __init__(self): self.steppers = [Stepper(0),Stepper(1)] self.queue = [] self.debug = 0 self.sent = 0 self.rcvd = 0 def pos_1(self,dev,pos): self.steppers[dev] = pos def int_2(self,code): if self.debug: if code&3 == 3: print "REPLY-OK",(code/4)/8,(code/4)&7 else: print "REPLY",code&3,code/4 if code <= 1: # movement ready for stepper s s = self.steppers[code] self._outlet(1,s.dev,s.pos) elif code&3 == 3: # OK if self.queue: c1 = code>>2 c2 = encode(self.rcvd,self.queue[0])[3]>>2 if c1 != c2: # wrong checksum reply self._outlet(3,(-2,c2)) self.queue.pop(0) else: # error pass # send if there is anything self.__send() def list_1(self,dev,move,speed): self.queue += self.steppers[dev](int(move),int(speed)) self.__send() def __send(self): if self.queue: self.sent += 1 code = encode(self.sent,self.queue[0]) if self.debug: print "SEND",self.sent%8,code
Thomas Grill - Elektromagnetische Kammermusik
32
# send out single bytes for vi in code: self._outlet(2,vi) self._outlet(3,len(self.queue)) class posctrl(pyext._class): def __init__(self): self.current = 0 self.target = 0 self.lock = False self.debug = False def int_1(self,p): '''position feedback from the servo''' if self.debug: print "SET",self.current,"->",p self.current = p self._lock_(False) self._go_() def int_2(self,p): '''go to absolute position''' if self.debug: print "GO",self.current,"->",p self.target = p self._go_() def int_3(self,pr): '''relative positioning''' self.target += pr self._go_() def bang_4(self): '''force unlocking''' self._lock_(False) def _go_(self): if self.current != self.target and not self.lock: self._lock_(True) self._outlet(1,self.target-self.current) def _lock_(self,l): self.lock = l self._outlet(2,self.lock) class move(pyext._class): '''calculate position and direction of next move''' def __init__(self,rng = 150,corr = 1.236,minstep = 3000,maxstep = 30000): self.pos = 0 self.rng = rng self.corr = corr self.minstep = minstep self.maxstep = maxstep self.idle = True # flag for idle state: can we send now, or do we have to postpone self.next = None # additional step not yet sent def list_1(self,frq,dur): '''note to play next''' time = min(max(self.minstep,1000000./frq/self.corr),self.maxstep) # ms per step steps = max(1,int(round(dur/(time/1000000.)))) # steps to go if self.pos >= self.rng/2: steps = -min(steps,self.pos) # move down else: steps = min(steps,self.rng-self.pos) # move up # output new position and step time out = (self.pos+steps,time) if self.idle: self.idle = False self._outlet(1,out) else: self.next = out # set (or overwrite) queue def int_2(self,p): ''' set current stepper position''' self.pos = p if not self.idle: # send queued stuff now if self.next: self._outlet(1,self.next) self.next = None self.idle = True

Thomas Grill - Elektromagnetische Kammermusik
33
Appendix B Arduino Firmware
Die Firmware des Arduino-Boards kann mit Hilfe der mitgelieferten Entwicklungsumgebung verfasst und in den Flash-Speicher der Platine geschrieben werden. Die verschiedenen Versionen der Arduino-Boards (USB- oder Bluetooth-Interface) verfügen über unterschiedliche Prozessoren und unterschiedlich großen Programmspeicher, dies spielt aber in diesem Zusammenhang keine Rolle. Zum Übersetzen des in C/C++ verfassten Programmcodes steht der GNU-C/C++-Compiler zur Verfügung, welcher gute Optimierung bietet und die neuesten Sprachstandards unterstützt. Die für dieses Projekt verfasste Firmware übernimmt die Kommunikation mit der seriellen Schnittstelle (über USB oder Bluetooth) inklusive Dekodierung der Kommandos und Rückmeldung an den Sender, sowie die Ansteuerung von maximal zwei Schrittmotoren. /* Arduino firmware for bipolar stepper motors using the L293D driver, (c)2007 Thomas Grill Two steppers can be controlled. Each one has 4 pins for the two coils and 1 pin for the enable signal (for both coils). */ class Stepper { public: Stepper(int id,int mpin1,int mpin2,int mpin3,int mpin4,int epin) : ident(id) , motorpin1(mpin1),motorpin2(mpin2),motorpin3(mpin3),motorpin4(mpin4),enablepin(epin) , delaytime(5000),step(0),togo(0),count(0) { pinMode(motorpin1, OUTPUT); pinMode(motorpin2, OUTPUT); pinMode(motorpin3, OUTPUT); pinMode(motorpin4, OUTPUT); pinMode(enablepin, OUTPUT); } void read(long b) { if(b&1) delaytime = b>>1; else { b >>= 1; if(b) togo += (b>>1)*(b&1?-1:1); else togo = count = 0; // reset } } int advance() { if(togo) { int inc = togo < 0?-1:1; step = (step+inc+4)%4; digitalWrite(enablepin, HIGH); digitalWrite(motorpin1, (step==0 || step==3)?HIGH:LOW); digitalWrite(motorpin2, (step==1 || step==0)?HIGH:LOW); digitalWrite(motorpin3, (step==2 || step==1)?HIGH:LOW); digitalWrite(motorpin4, (step==3 || step==2)?HIGH:LOW); togo -= inc; count += inc; if(!togo) // just reached zero Serial.print(ident,BYTE); } else digitalWrite(enablepin, LOW); return delaytime; } const int ident; const int motorpin1,motorpin2,motorpin3,motorpin4;

Thomas Grill - Elektromagnetische Kammermusik
34
const int enablepin; int delaytime,step,togo,count; }; Stepper stepper1(0, 7,4,6,5, 2),stepper2(1, 8,10,9,11, 13); void setup() { Serial.begin(115200); } static int del1 = 0,del2 = 0; static unsigned int bv[4]; static int bc = 0; static unsigned int checksum() { unsigned int c = (bv[3]<<4)^((bv[2]<<2)^(bv[1])); c = (c>>6)^(c&63); return (c>>3)^(c&7); } static long value(int c) { if(c == (bv[0]>>3)) return (long(bv[1])<<12)+((long(bv[2])<<6)+(long(bv[3]))); else return -1; } void loop() { while(Serial.available()) { unsigned int b = Serial.read,c = b&3; if(c == 0) bc = 0; // reset stream if(bc >= 0) { bv[bc] = b>>2; if(c != bc) { bc = -1; Serial.print((bv[0]&7)*4+2,BYTE); // error } else if(bc == 3) { unsigned int c = checksum(); long v = value(c); if(v >= 0) { if(v&1) stepper2.read(v>>1); else stepper1.read(v>>1); bc = -1; Serial.print(bv[0]*4+3,BYTE); } else { // checksum error bc = -1; Serial.print((bv[0]&7)*4+2,BYTE); } } else ++bc; } } if(!del1) del1 = stepper1.advance(); if(!del2) del2 = stepper2.advance(); int del = del1 < del2?del1:del2; if(del) { if(del > 100) del = 100; delayMicroseconds(del); del1 -= del; del2 -= del; } }

Thomas Grill - Elektromagnetische Kammermusik
35
Quellenverzeichnis
[1] Ablinger, Peter. „Quadraturen III ‚Wirklichkeit’“: http://ablinger.mur.at/docs/qu3dt.pdf [Zugriff 06.08.2007]
[2] Arduino, open-source electronics prototyping platform. http://www.arduino.cc [Zugriff 15.08.2007]
[3] Art Center Berlin Friedrichstraße: Ausstellung „Experience Art! Faszination Kunst und Technik - Installationen, interaktive und kinetische Kunst“. http://www.art-center-berlin.de/deutsch/ausstellungen/inhalt/exp_talkingmach.html [Zugriff 07.08.2007]
[4] Association Baschet: http://www.baschet.org [Zugriff 07.08.2007] [5] Baginsky, Nicolas Anatol. „Flamencomachines“. http://www.baginsky.de/flm [Zugriff
07.08.2007] [6] Baginsky, Nicolas Anatol. „The Three Sirens“. http://www.the-three-sirens.info
[Zugriff 07.08.2007] [7] Blake, A. „Reading Harry Pottermania“. http://www.opendemocracy.net/arts-
Literature/article_455.jsp [Zugriff 24.07.2007] [8] Briner, Ermanno. „Reclams Musikinstrumentenführer. Die Instrumente und ihre
Akustik“. Reclam, Ditzingen [9] Collins, Nicolas. „Handmade Electronic Music“, Routledge, 2006 [10] Davis, Hugh. „Neue Instrumente und Klangskulpturen: Ein Überblick Geschichte und
Wegbereiter“. In: Katalog zum Festival ars electronica „Der freie Klang“, 1987. [11] De la Motte-Haber, Helga. „Raumkompositionen und Klanginstallationen“ In: Institut
für Neue Musik und Musikerziehung Darmstadt (Hrsg.). 2001. „Konzert – Klangkunst – Computer“, Schott Musik International, Mainz
[12] De la Motte-Haber, Helga. „Von der Maschinenmusik zur algorithmischen Struktur“. In: Musik und Technik : fünf Kongreßbeiträge und vier Seminarberichte / hrsg. von Helga de la Motte-Haber und Rudolf Frisius. – Mainz [u.a.] : Schott, 1996.
[13] Deleuze, Gilles. Differenz und Wiederholung, Wilhelm Fink Verlag [14] Dickreiter, Michael. „Musikinstrumente. Moderne Instrumente. Historische
Instrumente. Klangakustik“, Bärenreiter Verlag [15] Föllmer. G.. „Audio Art“.
http://www.medienkunstnetz.de/themen/medienkunst_im_ueberblick/audio [Zugriff 09.08.2007]
[16] Frisius, Rudolf. „Musik und Technik: Veränderungen des Hörens – Veränderungen im Musikleben“. In: Musik und Technik: fünf Kongreßbeiträge und vier Seminarberichte / hrsg. von Helga de la Motte-Haber und Rudolf Frisius. – Mainz [u.a.] : Schott, 1996.
[17] Gameboy music club. http://www.gameboymusicclub.org [Zugriff 02.08.2007] [18] Gertich, Frank. „Real erklingender Mechanismus“ in: Neue Zeitschrift für Musik,
März/April 1995 [19] Grill, Thomas. „py/pyext – Python scripting external“. http://grrrr.org/ext/py [Zugriff
19.08.2007] [20] Grill, Thomas; Köcher, Hannes. „vibrez_pure“. http://vibrez.net/vibrez_pure [Zugriff
19.08.2007] [21] Grondines, Pierre. „Ionisation de Varèse - La révolution de la percussion“. In: La
Scena Musicale - Vol. 5, No. 10, 2000 [22] Ihmels, T.; Riedel, J.. „Die Methodik der generativen Kunst“:
http://www.medienkunstnetz.de/themen/generative_tools/generative_art [Zugriff 09.08.2007]
[23] Infusionsystems I-CubeX. http://infusionsystems.com [Zugriff 15.08.2007]

Thomas Grill - Elektromagnetische Kammermusik
36
[24] IRCAM-CGP. „Ivan Wyschnegradsky“. http://mac-texier.ircam.fr/textes/c00002193 [Zugriff 06.08.2007]
[25] Jazzmutant: „Lemur“: http://www.jazzmutant.com [Zugriff 02.08.2007] [26] Jones, D. W.. „Control of Stepping Motors – A Tutorial“:
http://www.cs.uiowa.edu/~jones/step [Zugriff 15.08.2007] [27] Jordà, Sergi; Kaltenbrunner, Martin; Geiger, Günter; Alonso, Marcos. „reactable“:
http://mtg.upf.edu/reactable [Zugriff 02.08.2007] [28] Kagel, Mauricio. in: Booklet zur CD Mauricio Kagel 7: „Nah und Fern“, WDR/MO
782062, S.13. [29] Keller, D.; Ferneyhough, B.. „Analysis by Modeling: Xenakis’s ST/10-1 080262“,
Journal of New Music Research 2004, Vol. 33, No. 2, pp. 161–171 [30] Knolle, Niels. „Neue Wege der Selbst-Professionalisierung durch die Neuen
Musiktechnologien“ In: Institut für Neue Musik und Musikerziehung Darmstadt (Hrsg.). 2001. „Konzert – Klangkunst – Computer“, Schott Musik International, Mainz
[31] König, Christian. Nachtnebel, Peter. „Phonotaktische Übungen“, in: skug – Journal für Musik, #38
[32] Küntzel, Tilman. „Wie Musik in meinen Ohren“. http://www.tkuentzel.de/pages/24hypercult.html [Zugriff 07.08.2007]
[33] Kusahara, M.. „Device Art: A New Form of Media Art from a Japanese Perspective“. Intelligent agent vol. 6 no. 2
[34] Lang, Bernhard. „Spiegelungen – Doubles“, in: Almanch zum Festival Wien Modern 2006, Hg. Berno Odo Polzer und Thomas Schäfer, Die Deutsche Bibliothek
[35] Lehrman, Paul D.. „About the Ballet mécanique“. http://www.antheil.org/balletmec.html [Zugriff 06.08.2007]
[36] LEMUR: League of Electronic Musical Urban Robots. http://lemurplex.org [Zugriff 07.08.2007]
[37] Maywa Denki. “What is Tsukuba Series”: http://www.maywadenki.com/concepts/what_tsukuba.html [Zugriff 07.08.2007]
[38] McIntosh, Thomas; Madan, Emmanuel. „The User – Symphony for Dot Matrix Printers“. http://www.theuser.org/dotmatrix/en/intro.html [Zugriff 07.08.2007]
[39] Merrit, Just. „Contained - Rückspiegel zur Realität: Was soll es, was ist Programm?“. In: Katalog zum Festival ars electronica „Memesis – Die Zukunft der Evolution“, 1996.
[40] Micromusic: http://www.micromusic.net [Zugriff 02.08.2007] [41] MIDI Manufacturers Association: MIDI (Musical Instrument Digital Interface):
http://www.midi.org [Zugriff 02.09.2007] [42] Museum Jean Tinguely Basel. Pressetext zur Ausstellung „Jean le Jeune - Jean
Tinguelys politische und künstlerische Basler Lehrjahre und das Frühwerk bis 1959“, 2002.
[43] NIME – International Conference on New Interfaces for Musical Expression: http://www.nime.org [Zugriff 02.08.2007]
[44] The Harry Partch Information Center. http://www.harrypartch.com [Zugriff 06.08.2007]
[45] Pavis, Patrice. „Die zeitgenössische Dramatik und die neuen Medien.“ In: Früchtl, Josef und Zimmermann, Jörg (Hrsg.). 2001. Ästhetik der Inszenierung. Frankfurt am Main: Suhrkamp. S. 240.
[46] Phleps, Thomas. "Complex, but simple - Conlon Nancarrows tempo-dissonierende Boogie Woogies und Canons für Player Piano“. In: Komposition als Kommunikation.

Thomas Grill - Elektromagnetische Kammermusik
37
Zur Musik des 20. Jahrhunderts. Hg. v. Constantin Floros, Friedrich Geiger u. Thomas Schäfer (Hamburger Jahrbuch für Musikwissenschaft 17). Frankfurt/M.
[47] Puckette, M. et al. „Pure Data“, http://puredata.info [Zugriff 19.08.2007] [48] Ruschkowski, A.. „Elektronische Klänge und musikalische Entdeckungen“, Reclam,
Stuttgart 1998. [49] Russolo, L. Luigi. „The art of noise“ (translated from „L’arte dei Rumori“).
Ubuclassics 2004. http://www.ubu.com/historical/gb/russolo_noise.pdf [Zugriff 06.08.2007]
[50] Schafer, R. Murray. „Die Schallwelt in der wir leben“. Rote Reihe 30, universal edition.
[51] Singer, E.; Larke, K.; Biancardi, D.. „LEMUR GuitarBot: MIDI Robotic String Instrument“,Proceedings of the 2003 Conference on New Interfaces for Musical Expression (NIME-03), Montreal, Canada
[52] Smith, Julius Orion III. „The Bow-String Scattering Junction“: http://ccrma.stanford.edu/~jos/pasp/Bow_String_Scattering_Junction.html [Zugriff 03.09.2007]
[53] STEIM - Center for research & development of instruments & tools for performers in the electronic performance arts. http://www.steim.nl [Zugriff 02.08.2007]
[54] Steiner, H.C.. „pd-extended“. http://at.or.at/hans/pd/installers.html [Zugriff 31.07.2007]
[55] Stockhausen, K.. „Texte zur elektronischen und instrumentalen Musik“, Bd. 1, Köln 1963.
[56] Texas Instruments, „L293, L293D – Quadruple Half-H drivers“: http://focus.ti.com/lit/ds/symlink/l293.pdf [Zugriff 15.08.2007]
[57] Troyer, Kassian. „Live Instrument Laptop“, Diplomarbeit 2004. [58] Wikipedia, „Floppy Disk“: http://en.wikipedia.org/wiki/Floppy_disk [Zugriff
15.08.2007] [59] Wikipedia, „Jacques de Vaucanson“:
http://en.wikipedia.org/wiki/Jacques_de_Vaucanson [Zugriff 03.09.2007] [60] Wikipedia, „Musikinstrument“: http://de.wikipedia.org/wiki/Musikinstrument [Zugriff
16.08.2007] [61] Wikipedia, „Spieldose“: http://de.wikipedia.org/wiki/Spieldose [Zugriff 03.09.2007] [62] Valentin, Erich. „Handbuch der Musikinstrumentenkunde“, Bosse [63] Van Rossum, G. et al. „Python“. http://python.org [Zugriff 19.08.2007] [64] Van Tiggelen, Ph. J.. „Componium. The Mechanical Musical Improvisor“, Louvain-
la-Neuve, Publications d’histoire de l’art et d’archéologie de l’Université Catholique de Louvain, 1987
[65] Vienna Symphonic Library, http://vsl.co.at [Zugriff 09.08.2007] [66] Vuksic, Valentina. „Harddisko“: http://harddisko.ch.vu [Zugriff 07.08.2007] [67] Xenakis, Iannis. “Formalized Music: Thought and Mathematics in Composition”.
1992 (Revised edition). Stuyvesant, NY: Pendragon Press.