ELECTROMAGNETIC WAVE THEORY Texts... · to the study of electromagnetic wave behavior. Scattering...
1032
ELECTROMAGNETIC WAVE THEORY
Transcript of ELECTROMAGNETIC WAVE THEORY Texts... · to the study of electromagnetic wave behavior. Scattering...
-
ELECTROMAGNETIC
WAVE THEORY
-
ELECTROMAGNETIC
WAVE THEORY
JIN AU KONG
EMW PublishingCambridge, Massachusetts, USA
-
Copyright c© 2008 by Jin Au Kong
Published by EMW Publishing.
All rights reserved.
This book is printed on acid-free paper
ISBN 0-9668143-9-8
Manufactured in the United States of America
0 9 8 7 6 5 4 3
-
PREFACE
This book presents a unified macroscopic theory of electromagneticwaves in accordance with the principle of special relativity from thepoint of view of the form invariance of the Maxwell equations and theconstitutive relations. Great emphasis is placed on the fundamentalimportance of the k vector in electromagnetic wave theory. We intro-duce a fundamental unit Ko = 2π meter−1 for the spatial frequency,which is cycle per meter in spatial variation. This is similar to thefundamental unit for temporal frequency Hz, which is cycle per sec-ond in time variation. The unit Ko is directly proportional to the unitHz; one Ko in spatial frequency corresponds to 300 MHz in temporalfrequency.
This is a textbook on electromagnetic wave theory, and topicsessential to the understanding of electromagnetic waves are selectedand presented. Chapter 1 presents fundamental laws and equationsfor electromagnetic theory. Chapter 2 is devoted to the treatment oftransmission line theory. Electromagnetic waves in media are stud-ied in Chapter 3 with the kDB system developed to study wavesin anisotropic and bianisotropic media. Chapter 4 presents a detailedtreatment of reflection, transmission, guidance, and resonance of elec-tromagnetic waves. Starting with Čerenkov radiation, we study radia-tion and antenna theory in Chapter 5. Chapter 6 then elaborates onthe various theorems and limiting cases of Maxwell’s theory importantto the study of electromagnetic wave behavior. Scattering by spheres,cylinders, rough surfaces, and volume inhomogeneities are treated inChapter 7. In Chapter 8, we present Maxwell’s theory from the pointof view of Lorentz covariance in accordance with the principle of spe-cial relativity. The problem section at the end of each section providesuseful exercise and applications.
The various topics in the book can be taught independently, andthe material is organized in the order of increasing complexity in math-ematical techniques and conceptual abstraction and sophistication.This book has been used in several undergraduate and graduate coursesthat I have been teaching at the Massachusetts Institute of Technology.
– v –
-
vi Preface
The first version of the book was published in 1975 by WileyInterscience, New York, entitled Theory of Electromagnetic Waves,which was based on my 1968 Ph.D. thesis, where the concept of bian-isotropic media was introduced. The book was expanded and publishedin 1986 with the present title and its second edition appeared in 1990.Since 1998, it has been published by EMW Publishing Company, Mas-sachusetts. The development of the various concepts in the book reliesheavily on published work. I have not attempted the task of referringto all relevant publications. The list of books and journal articles in theReference Section at the end of the book is at best representative andby no means exhaustive. Some of the results contained in the book aretaken from many of my research projects, which have been supportedby grants and contracts from the National Science Foundation, theNational Aeronautics and Space Administration, the Office of NavalResearch, the Army Research Office, the Jet Propulsion Laboratory ofthe California Institute of Technology, the MIT Lincoln Laboratory,the Schlumberger-Doll Research Center, the Digital Equipment Cor-poration, the IBM Corporation, and the funding support associatedwith the award of the S. T. Li prize for the year 2000.
During the writing and preparation of the book, many peoplehelped. In particular, I would like to acknowledge Chi On Ao for for-mulating the TEX macros, and Zhen Wu for editing the text and con-structing the index. Over the years, many of my teaching and researchassistants provided useful suggestions and proofreading, notably Le-ung Tsang, Michael Zuniga, Weng Chew, Tarek Habashy, Robert Shin,Shun-Lien Chuang, Jay Kyoon Lee, Apo Sezginer, Soon Yun Poh, EricYang, Michael Tsuk, Hsiu Chi Han, Yan Zhang, Henning Braunisch,Bae-Ian Wu, Xudong Chen, and Baile Zhang. I would like to expressmy gratitude to them and to the students whose enthusiastic responseand feedback continuously give me joy and satisfaction in teaching.
J. A. Kong
Cambridge, MassachusettsDecember 2007
-
CONTENTS
Chapter 1. FUNDAMENTALS 1
1.1 Maxwell’s Theory 3
A. Maxwell’s Equations 3
B. Vector Analysis 6
1.2 Electromagnetic Waves 24
A. Wave Equation and Wave Solution 24
B. Unit for Spatial Frequency k 27
C. Polarization 33
1.3 Force, Power, and Energy 45
A. Lorentz Force Law 45
B. Lenz’ Law and Electromotive Force (EMF) 53
C. Poynting’s Theorem and Poynting Vector 56
1.4 Hertzian Waves 65
A. Hertzian Dipole 65
B. Electric and Magnetic Fields 68
C. Electric Field Pattern 71
1.5 Constitutive Relations 81
A. Isotropic Media 82
B. Anisotropic Media 83
C. Bianisotropic Media 84
D. Biisotropic Media 85
E. Constitutive Matrices 86
1.6 Boundary Conditions 90
A. Continuity of Electric and Magnetic Field
Components 90
B. Surface Charge and Current Densities 92
C. Boundary Conditions 93
1.7 Reflection and Guidance 98
A. Wave Vector k 98
– vii –
-
viii Contents
B. Reflection and Transmission of TE Waves 99
C. Reflection and Transmission of TM Waves 105
D. Brewster Angle and Zero Reflection 107
E. Guidance by Conducting Parallel Plates 111
Answers 120
Chapter 2. TRANSMISSION LINES 137
2.1 Transmission Line Theory 139
A. Transmission Line Equations 139
B. Circuit Theory 144
2.2 Time-Domain Transmission Line Theory 153
A. Wave Equations and Wave Solutions 153
B. Transients on Transmission Lines 156
C. Normal Modes and Natural Frequencies 168
D. Initial Value Problem 170
2.3 Sinusoidal Steady State Transmission
Lines 180
A. Sinusoidal Steady State 180
B. Complex Impedance 181
C. Time Average Power 186
D. Generalized Reflection Coefficient 187
E. Normalized Complex Impedance
(Smith Chart) 190
F. Transmission Line Resonators 192
2.4 Lumped Element Transmission Lines 201
A. Lumped Element Line 202
B. Dispersion Relations for Lumped Element
Lines 205
C. Periodically Loaded Transmission Lines 208
2.5 Transmission Line Modeling 215
A. Modeling Reflection and Transmission 215
-
ix
B. Modeling Antenna Radiation 220
C. Array Antennas 225
D. Array Pattern Multiplication 229
E. Equivalence Principle 235
Answers 249
Chapter 3. MEDIA 261
3.1 Time-Harmonic Fields 263
A. Continuous Monochromatic Waves 263
B. Polarization of Monochromatic Waves 265
C. Time-Average Poynting Power Vector 266
D. Waves in Conducting Media 268
E. Waves in Plasma Media 271
F. Dispersive Media 278
G. Field Energy in Dispersive Media 282
3.2 Bianisotropic Media 292
A. Anisotropic Media 292
B. Biisotropic Media 295
C. Bianisotropic Media 296
D. Symmetry Conditions for Lossless Media 297
E. Reciprocity Conditions 299
F. Causality Relations 301
3.3 kDB System for Waves in Media 306
A. Wave Vector k 306
B. The kDB System 309
C. Maxwell Equations in kDB System 313
D. Waves in Isotropic Media 314
E. Waves in Uniaxial Media 315
F. Waves in Gyrotropic Media 323
G. Waves in Bianisotropic Media 330
H. Waves in Nonlinear Media 339
-
x Contents
Answers 353
Chapter 4. REFLECTION AND GUIDANCE 365
4.1 Reflection and Transmission 367
A. Reflection and Transmission of TM Waves 368
B. Reflection and Transmission of TE Waves 371
C. Phase Matching 373
D. Total Reflection and Critical Anglel 375
E. Backward Waves and Negative Refraction 377
F. Double Refraction in Uniaxial Media 378
G. Total Transmission and Brewster Angle 380
H. Zenneck Wave 382
I. Plasma Surface Wave 383
J. Reflection and Transmission by a LayeredMedium 384
K. Reflection Coefficients for Stratified Media 387
L. Propagation Matrices and TransmissionCoefficients 390
4.2 Wave Guidance 402
A. Guidance by Conducting Parallel Plates 402
B. Excitation of Modes in Parallel-PlateWaveguides 408
C. TM Modes in Parallel-Plate Waveguides 410
D. Attenuation of Guided Waves Due to WallLoss 411
E. Guided Waves in Isotropic Medium CoatedConductor 415
F. Guided Waves in Layered Media 422
G. Guided Waves in a Symmetric SlabDielectric Waveguide 425
H. Cylindrical Waveguides 429
I. Cylindrical Rectangular Waveguides 430
-
xi
J. Cylindrical Circular Waveguides 435
4.3 Resonance 462
A. Rectangular Cavity Resonator 462
B. Circular Cavity Resonator 467
C. Spherical Cavity Resonator 468
D. Cavity Perturbation 472
Answers 478
Chapter 5. RADIATION 487
5.1 Čerenkov Radiation 489
5.2 Green’s Functions 495
A. Dyadic Green’s Functions 495
B. Radiation Field Approximation 499
5.3 Hertzian Dipoles 504
A. Hertzian Electric Dipole 504
B. Hertzian Magnetic Dipole and Small LoopAntenna 508
5.4 Linear Dipole Arrays 516
A. Uniform Array Antenna with ProgressivePhase Shift 516
B. Array Antennas with Nonuniform CurrentDistributions 523
C. Dolph-Chebyshev Arrays 526
D. Array Pattern Synthesis 533
5.5 Linear Antennas 545
5.6 Biconical Antennas 554
A. Formulation and Wave Solutions 554
B. Solution in the Air Region and DipoleFields 558
C. Solution in the Antenna Region 560
D. Transmission Line Model 561
-
xii Contents
E. Formal Solution of Biconical AntennaProblem 568
5.7 Dipole Antennas in Layered Media 572
A. Integral Formulation 572
B. Contour Integration Methods 584
C. Dipole Antenna on a Two-Layer Medium 607
Answers 633
Chapter 6. THEOREMS OF WAVES ANDMEDIA 647
6.1 Equivalence Principle 649
A. Electric and Magnetic Dipole Sources 649
B. Image Sources 650
C. Electric and Magnetic Current Sheets 652
D. Induced and Impressed Current Sheets 654
Topic 6.1A Uniqueness Theorem 661
Topic 6.1B Duality and Complementarity 663
Topic 6.1C Mathematical Formulations ofHuygens’ Principle 671
Topic 6.1D Fresnel and Fraunhofer Diffraction 671
6.2 Reaction and Reciprocity 695
A. Reaction 695
B. Reciprocity 697
C. Reciprocity Conditions 701
D. Modified Reciprocity Theorem 702
Topic 6.2A Stationary Formulas andRayleigh-Ritz Procedure 703
Topic 6.2B Method of Moments 711
6.3 Quasi-Static Limits 715
6.4 Geometrical Optics Limit 722
6.5 Paraxial Limit 743
Topic 6.5A Gaussian Beam 743
-
xiii
6.6 Quantization of Electromagnetic Waves 751
A. Uncertainty Principle 752
B. Annihilation and Creation Operators 755
C. Wave Quantization in Bianisotropic Media 762
Answers 768
Chapter 7. SCATTERING 771
7.1 Scattering by Spheres 773
A. Rayleigh Scattering 773
B. Mie Scattering 776
7.2 Scattering by a Conducting Cylinder 782
A. Exact Solution 782
B. Watson Transformation 784
C. Creeping Waves 786
7.3 Scattering by Periodic Rough Surfaces 789
A. Scattering by Periodic CorrugatedConducting Surfaces 789
B. Scattering by Periodic Dielectric Surfaces 793
7.4 Scattering by Random Rough Surfaces 801
A. Kirchhoff Approximation 801
B. Geometrical Optics Solution 811
C. Small Perturbation Method 815
7.5 Scattering by Periodic Media 825
A. First-Order Coupled-Mode Equations 827
B. Reflection and Transmission byPeriodically-Modulated Slab 829
C. Far-Field Diffraction of a Gaussian Beam 833
D. Two-Dimensional Photonic Crystals 835
E. Band Gaps in One-Dimensional PeriodicalMedia 837
7.6 Scattering by Random Media 841
A. Dyadic Green’s Function for Layered Media 843
-
xiv Contents
B. Scattering by a Half-Space RandomMedium 848
7.7 Effective Permittivity for a VolumeScattering Medium 852
A. Random Discrete Scatterers 855
B. Effective Permittivity for a ContinuousRandom Medium 860
Answers 866
Chapter 8. RELATIVITY 873
8.1 Maxwell-Minkowski Theory 875
8.2 Lorentz Transformation 879
A. Lorentz Transformation of Space and Time 879
B. Lorentz Transformation of Field Vectors 883
C. Lorentz Invariants 888
D. Electromagnetic Field Classification 890
E. Transformation of Frequency and WaveVector 892
Topic 8.2A Aberration Effect 893
Topic 8.2B Doppler Effect 893
8.3 Waves in Moving Media 903
A. Transformation of Constitutive Relations 903
B. Waves in Moving Uniaxial Media 909
C. Moving Boundary Conditions 913
D. Phase Matching at Moving Boundaries 922
E. Force on a Moving Dielectric Half-Space 924
F. Guided Waves in a Moving Dielectric Slab 927
G. Guided Waves in Moving Gyrotropic Media 929
8.4 Maxwell Equations in Tensor Form 934
A. Contravariant and Covariant Vectors 936
B. Field Tensor and Excitation Tensor 942
C. Constitutive Relations in Tensor Form 951
-
xv
8.5 Hamilton’s Principle and Noether’sTheorem 954
A. Action Integral 954
B. Hamilton’s Principle and MaxwellEquations 955
C. Noether’s Theorem and EnergyMomentum Tensors 956
Answers 962
REFERENCES 969
INDEX 991
-
1
FUNDAMENTALS
1.1 Maxwell’s Theory
A. Maxwell’s Equations
B. Vector Analysis
1.2 Electromagnetic Waves
A. Wave Equation and Wave Solution
B. Unit for Spatial Frequency k
C. Polarization
1.3 Force, Power, and Energy
A. Lorentz Force Law
B. Lenz’ Law and Electromotive Force (EMF)
C. Poynting’s Theorem and Poynting Vector
1.4 Hertzian Waves
A. Hertzian Dipole
B. Electric and Magnetic Fields
C. Electric Field Pattern
1.5 Constitutive Relations
A. Isotropic Media
B. Anisotropic Media
C. Bianisotropic Media
D. Biisotropic Media
E. Constitutive Matrices
– 1 –
-
2 1. Fundamentals
1.6 Boundary Conditions
A. Continuity of Electric and Magnetic Field Components
B. Surface Charge and Current Densities
C. Boundary Conditions
1.7 Reflection and Guidance
A. Wave Vector k
B. Reflection and Transmission of TE Waves
C. Reflection and Transmission of TM Waves
D. Brewster Angle and Zero Reflection
E. Guidance by Conducting Parallel Plates
Answers
-
1.1 Maxwell’s Theory 3
1.1 Maxwell’s Theory
A. Maxwell’s Equations
The laws of electricity and magnetism were established in 1873 byJames Clerk Maxwell (1831–1879). In three-dimensional vector nota-tion, the Maxwell equations are
∇×H = ∂∂t
D + J (1.1.1)
∇× E = − ∂∂t
B (1.1.2)
∇ ·D = ρ (1.1.3)
∇ ·B = 0 (1.1.4)where E, B, H, D, J, and ρ are real functions of position and time.
E = electric field strength (volts/m)
B = magnetic flux density (webers/m2)
H = magnetic field strength (amperes/m)
D = electric displacement (coulombs/m2)
J = electric current density (amperes/m2)
ρ = electric charge density (coulombs/m3)
Equation (1.1.1) is Ampère’s law or the generalized Ampère circuit law.Equation (1.1.2) is Faraday’s law or Faraday’s magnetic induction law.Equation (1.1.3) is Coulomb’s law or Gauss’ law for electric fields.Equation (1.1.4) is Gauss’ law or Gauss’ law for magnetic fields.We generally refer to E and D as electric fields, and H and Bas magnetic fields.
Maxwell’s contribution to the laws of electricity and magnetism isthe term ∂D/∂t , which is called the displacement current. The addi-tion of the displacement current to the electric current density J (r, t)in the original Ampère’s law has at least three major consequences.First, in a capacitor which is an open circuit for direct current, thedisplacement current insures the continuity of alternating currents inelectric circuits. Secondly, the continuity law
∇ · J = − ∂∂t
ρ (1.1.5)
-
4 1. Fundamentals
follows from (1.1.1) and (1.1.3) by making use of the vector identity∇ · (∇ × H) = 0 . It is the displacement term that guarantees theconservation of electric current and charge densities. Eq. (1.1.5) statesthat the electric current and charge densities are conserved at all time.Thirdly, Faraday’s law in (1.1.2) states that surrounding a time-varyingmagnetic field, electric fields are produced, and are also time-varying.With the displacement term in (1.1.1), Ampère’s law states that aroundtime-varying electric fields, time-varying magnetic fields are produced.This interrelationship between the time-varying electric and magneticfields constitutes the foundation of electromagnetic wave theory andled Maxwell to the prediction of electromagnetic waves.
In developing his theory for the electromagnetic fields in spaceand time, Maxwell conceived of a substance filling the whole spacecalled aether. In the aether, the electric fields D and E are relatedby a dielectric permittivity o , and the magnetic fields B and H arerelated by a magnetic permeability µo .
D = oE (1.1.6a)B = µoH (1.1.6b)
where
o ≈ 8.85× 10−12 farad/meterµo= 4π × 10−7 henry/meter
where the numerical values for o and µo are expressed in MKS units.We now call (1.1.6) the constitutive relations for free space.
With Equations (1.1.1)–(1.1.6), Maxwell’s theory of electromag-netic fields is completely expressed. Originally written in Cartesiancomponent form, Maxwell’s equations were cast in the current vectorform by Oliver Heaviside (1850–1925). In 1888, Heinrich Rudolf Hertz(1857–1894) demonstrated the generation of radio waves and experi-mentally verified Maxwell’s theory. Since then, electromagnetic theoryhas played a central role in the development of radio, television, wire-less communications, radar, microwave heating, remote sensing, andnumerous other practical applications. The special theory of relativitydeveloped by Albert Einstein (1879–1955) in 1905 further asserted therigorousness and elegance of Maxwell’s theory. As a well-establishedscientific discipline, this sophisticated theoretical structure embodiesmany principles and concepts which serve as fundamental rules of na-ture and vital links for all scientific disciplines.
-
1.1 Maxwell’s Theory 5
James Clerk Maxwell (13 June 1831 – 5 November 1879)James Clerk Maxwell attended University of Edinburgh (1847–1850),
and studied under William Hopkins at Cambridge University (1850–1854).He was a fellow of Trinity (1855–1856), Professor of Natural Philosophy atMarischal College of the University of Aberdeen (1856–1860), and at King’sCollege (1860–1865). He was the first Cavendish Professor of ExperimentalPhysics at Cambridge University to build and direct the Cavendish Labora-tory (1871–1879). He published four books and about 100 papers starting atage 14, including ‘On Faraday’s Lines of Forces’ in 1855, ‘On Physical Linesof Force’ in 1861, and ‘A Dynamical Theory of the Electromagnetic Field’ in1864. In 1865, at age 33, he retired to his country home estate to write hismonumental book A Treatise of Electricity and Magnetism (Constable andCompany, London, 1873; Dover Publications, New York, 1006 pages, 1954).
Michael Faraday (22 September 1791 – 25 August 1867)Faraday became an assistant to Sir Humphry Davy at the Royal Institu-
tion on 1 March 1813. In September 1821, his experimentation demonstratedelectro-magnetic rotation, initiated the concept of electric motor. In August1831, he discovered electro-magnetic induction, and that magnetism producedelectricity through movement, the principle behind the electric transformerand generator. He became professor of chemistry in 1833. Faraday publishedmany of his results in the three-volume Experimental Researches in Electricity(1839–1855).
Johann Carl Friedrich Gauss (30 April 1777 – 23 February 1855)Gauss studied mathematics at the University of Göttingen from 1795 to
1798, and received his doctoral degree from the University of Helmstedt in1799. In 1807 he took the position of director of the Göttingen Observatory.In 1832 he presented a systematic use of absolute units (length, mass, time)to measure nonmechanical quantities. From 1831 to 1837 he worked closelywith Wilhelm Eduard Weber (24 October 1804 – 23 June 1891) on terrestrialmagnetism and organized a system of stations for systematic observations.
André-Marie Ampère (20 January 1775 – 10 June 1836)Ampère was appointed professor at Bourg Ecole Centrale in 1802, at
the Ecole Polytechnique in 1809, and at Université de France in 1826. InSeptember 1820, Ampère showed that two parallel conductors attract eachother if they carry currents that flow in the same direction and repel if thecurrents flow in opposite directions. In 1823–1826, he completed his memoir onthe ‘Mathematical Theory of Electrodynamic Phenomena, Uniquely Deducedfrom Experience’.
Charles-Augustin de Coulomb (14 June 1736 – 23 August 1806)Coulomb worked in the Corps du Génie until he retired in 1791. In 1777
he invented the torsion balance, which enabled him to establish the funda-mental laws of electricity by measuring the force between two small spherescharged with electricity. Between 1785 and 1791, he published seven treatiseson electricity and magnetism.
-
6 1. Fundamentals
B. Vector Analysis
A vector A has a magnitude and a direction, which can be representedgraphically by a straight-line element of length proportional to themagnitude of A and with an arrow pointing in the direction of A . Ina Cartesian coordinate system (also called the rectangular coordinatesystem), we write in terms of the three Cartesian components Ax, Ay ,and Az [Fig. 1.1.1].
A
x̂
ŷ
ẑ
Ax
Ay
Az
x
y
z
Figure 1.1.1 Projection of A in rectangular coordinate system.
A = x̂Ax + ŷAy + ẑAz
where Ax, Ay, Az are the projections of A onto the x, y, z axes. Wedenote the directions of the x, y, z axes with x̂, ŷ, ẑ each of themhas unit magnitude with the scalar product x̂ · x̂ = ŷ · ŷ = ẑ · ẑ = 1 .They are called the unit vectors. Furthermore x̂ · ŷ = ŷ · ẑ = ẑ · x̂ = 0 .We use a hat instead of an overbar to represent the vector with unitmagnitude.
Rene Descartes (31 March 1596 – 11 February 1650)Rene Descartes originated the Cartesian coordinates and founded an-
alytic geometry. His philosophy is called Cartesianism (from Cartesius, theLatin form of his name), with the famous statement ‘I think, therefore I am.’He preached universal doubt; only one thing cannot be doubted: doubt itself.
-
1.1 Maxwell’s Theory 7
Vector Addition and SubtractionTwo vectors A and B , when they are not in the same direction or in
opposite directions, determine a plane. In Cartesian components, we write
A = x̂Ax + ŷAy + ẑAzB = x̂Bx + ŷBy + ẑBz
It follows that
A±B = x̂(Ax ±Bx) + ŷ(Ay ±By) + ẑ(Az ±Bz)
Scalar Dot ProductThe scalar or dot product of two vectors A and B , denoted by A ·B ,
is a scalar number,
A ·B = AxBx + AyBy + AzBz
Vector Cross ProductThe vector or cross product of two vectors A and B , denoted by A×B ,
is a vector. In terms of their Cartesian components,
A×B = x̂(AyBz −AzBy) + ŷ(AzBx −AxBz) + ẑ(AxBy −AyBx)
=
∣∣∣∣∣x̂ ŷ ẑAx Ay AzBx By Bz
∣∣∣∣∣For the three orthogonal unit vectors x̂, ŷ, and ẑ it is seen that x̂ =ŷ × ẑ, ŷ = ẑ × x̂, ẑ = x̂× ŷ.
The direction of A×B follows the right-hand rule, i.e., when the fingersof the right hand rotate from A to B , the thumb of the right hand points inthe direction of A×B . Thus the vector A×B is perpendicular to both Aand B and the plane containing A and B . It is seen that for A = x̂Ax+ŷAyand B = x̂Bx + ŷBy both in the xy -plane, A×B = ẑ(AxBy −AyBx) is inthe ẑ direction perpendicular to both A and B .
Division by a vector is not defined; thus B/A and 1/A are meaninglessexpressions. If none of the operations of addition, subtraction, dot product,or cross product is imposed on A and B , the entity AB is called a dyad.In the language of tensor analysis, a dyad is a tensor of second rank, whileall vectors are tensors of first rank.
-
8 1. Fundamentals
Operation of Three VectorsFor three vectors A , B , and C , we have
C · (A×B) = A · (B × C) = B · (C ×A) (1.1.7)
=
∣∣∣∣∣Cx Cy CzAx Ay AzBx By Bz
∣∣∣∣∣ =∣∣∣∣∣Ax Ay AzBx By BzCx Cy Cz
∣∣∣∣∣ =∣∣∣∣∣Bx By BzCx Cy CzAx Ay Az
∣∣∣∣∣C × (A×B) = x̂ [Cy (AxBy −AyBx)− Cz(AzBx −AxBz)]
+ ŷ [Cz(AyBz −AzBy)− Cx(AxBy −AzBy)]+ ẑ [Cx(AzBx −AxBz)− Cy(AxBy −AyBx)]
= (x̂Ax + ŷAy + ẑAz)(CxBx + CyBy + CzBz)− (CxAx + CyAy + CzAz)(x̂Bx + ŷBy + ẑBz)
= A(C ·B)− (C ·A)B (1.1.8)
Notice that the vector C × (A × B) is perpendicular to C and lies in theplane determined by A and B .
Operation with the del OperatorThe del operator ∇ is a vector differential operator written as
∇ = x̂ ∂∂x
+ ŷ∂
∂y+ ẑ
∂
∂z
The following can be proved in Cartesian coordinates or in vector form:
∇ · (E ×H) = H · (∇× E)− E · (∇×H) (1.1.9)∇ · (∇×A) = 0 (1.1.10)∇× (∇Φ) = 0 (1.1.11)
∇× (∇× E) = ∇(∇ · E)−∇2E (1.1.12)
where
∇2 = ∇ · ∇ = ∂2
∂x2+
∂2
∂y2+
∂2
∂z2(1.1.13)
is the Laplacian operator in the rectangular coordinate system.
Pierre-Simon Laplace (28 March 1749 – 5 March 1827)Pierre-Simon Laplace was appointed to a chair of mathematics at the
École Militaire in Paris at the age of 19. During the French Revolution hehelped to establish the metric system. The Laplace equation ∇2 ·Φ = 0 waspublished in 1813.
-
1.1 Maxwell’s Theory 9
Gradient of a Scalar
When the del operator operates on a scalar function Φ(x, y, z), the result is a vector
∇Φ = x̂ ∂∂x
Φ + ŷ∂
∂yΦ + ẑ
∂
∂zΦ (1.1.14)
called the gradient of Φ(x, y, z). The differential form of the gradient of Φ as definedstates that
∇Φ = x̂ lim∆x→0
∆Φ
∆x+ ŷ lim
∆y→0∆Φ
∆y+ ẑ lim
∆z→0∆Φ
∆z
= x̂ lim∆x→0
1
∆x
[(Φ(x +
∆x
2, y, z)− Φ(x− ∆x
2, y, z)
)]
+ ŷ lim∆y→0
1
∆y
[(Φ(x, y +
∆y
2, z)− Φ(x, y − ∆y
2, z)
)]
+ ẑ lim∆z→0
1
∆z
[(Φ(x, y, z +
∆z
2)− Φ(x, y, z − ∆z
2)
)](1.1.15)
When Φ(x, y, z) = Φ(x) is a function of x only, ∇Φ(x) is a vector pointing in thedirection of increasing x with the magnitude equal to the slope of the function atx.
EXAMPLE 1.1.1 Electric field vector as gradient of a potential function.When there is no time variation, we may write the electric field vector E as
E = −∇Φ (E1.1.1.1)
and call Φ a potential function. As the gradient ∇Φ points in the direction ofincreasing potential Φ, the electric field E points from high potential towards lowpotential, similar to water flowing from a high altitude to lower ground.
Giving the potential of a point charge Q is
Φ =Q
4πr
the electric field is
E = − ∂∂r
Φ =Q
4πr2
Thus the electric field points from high potential to low potential.
— END OF EXAMPLE 1.1.1 —
-
10 1. Fundamentals
Divergence of a Vector
The divergence of a vector function is a scalar, defined as
∇ ·D =(x̂
∂
∂x+ ŷ
∂
∂y+ ẑ
∂
∂z
)· (x̂Dx + ŷDy + ẑDz)
=∂
∂xDx +
∂
∂yDy +
∂
∂zDz (1.1.16)
x
y
z
∆x∆y
∆z
(x0, y0, z0)
Figure 1.1.2 Differential volume ∆x∆y∆z.
Consider a differential volume with sides ∆x,∆y,∆z centered around apoint (x0, y0, z0) [Fig. 1.1.2]. The divergence as defined states that
∇·D=lim∆x→0∆y→0∆z→0
1∆x∆y∆z
{∆y∆z
[Dx(x0+
∆x2
, y0, z0)−Dx(x0−∆x2
, y0, z0)]
+ ∆z∆x[Dy(x0, y0 +
∆yz
, z0)−Dy (x0, y0−∆yz
, z0)]
+ ∆x∆y[Dz(x0, y0, z0 +
∆z2
)−Dz(x0, y0, z0 −∆z2
)]}(1.1.17)
-
1.1 Maxwell’s Theory 11
Gauss Theorem or Divergence Theorem
The first term in the braces is equal to the field component Dx at thesurface at x = x0 + ∆x2 multiplied by the surface area ∆y∆z . We define asurface normal vector dS pointing outward of the volume such that at thesurface at x = x0 + ∆x2 , dS = x̂∆y∆z and at the surface at x = x0 − ∆x2 ,dS = −x̂∆y∆z . Then the negative sign in the second term is due to D dotmultiplied by dS . All six terms account for the six differential areas boundingthe differential volume ∆V = ∆x∆y∆z with a surface normal dS . We thusexpress the divergence of D as
∇ ·D = lim∆V→0
1∆V©∫∫
dS ·D (1.1.18)
Applying (1.1.18) to a large volume V containing an infinite number of suchinfinitesimal differential volumes [Fig. 1.1.3], we note that integrating the di-vergence over the volume surfaces shared by adjacent differential volumes willhave no contribution because the surface normals point in opposite directionsand thus cancel. The result is the divergence theorem or Gauss theorem
V
S
Figure 1.1.3 Derivation of divergence theorem.
∫∫∫V
dV ∇ ·D =©∫∫
S
dS ·D (1.1.19)
The divergence theorem states that the volume integral of the divergence ofthe vector field D is equal to the total outward flux D through the surfaceS enclosing the volume.
-
12 1. Fundamentals
Curl of a VectorThe curl of a vector field H is a vector defined as
∇×H=(x̂
∂
∂x+ ŷ
∂
∂y+ ẑ
∂
∂z
)×H =
∣∣∣∣∣∣x̂ ŷ ẑ∂∂x
∂∂y
∂∂z
Hx Hy Hz
∣∣∣∣∣∣= x̂
(∂
∂yHz −
∂
∂zHy
)+ ŷ
(∂
∂zHx −
∂
∂xHz
)+ ẑ
(∂
∂xHy −
∂
∂yHx
)(1.1.20)
Consider a differential volume of sides ∆x,∆y,∆z centered around a point(x0, y0, z0) . In the Cartesian coordinate system, the differential form of thecurl of H as defined states that
∇×H = lim∆x→0∆y→0∆z→0
{1
∆x
[x̂×
(H(x0 +
∆x2
, y0, z0)−H(x0 −∆x2
, y0, z0))]
+1
∆y
[ŷ ×
(H(x0, y0 +
∆y2
, z0)−H(x0, y0 −∆y2
, z0))]
+1
∆z
[ẑ ×
(H(x0, y0, z0 +
∆z2
)−H(x0, y0, z0 −∆z2
))]}
= lim∆x→0∆y→0∆z→0
1∆x∆y∆z
×{x̂
[∆x∆z
(Hz(x0, y0 +
∆y2
, z0)−Hz(x0, y0 −∆y2
, z0))
−∆x∆y(Hy(x0, y0, z0 +
∆z2
)−Hy(x0, y0, z0 −∆z2
))]
+ ŷ[∆x∆y
(Hx(x0, y0, z0 +
∆z2
)−Hx(x0, y0, z0 −∆z2
))
−∆y∆z(Hz(x0 +
∆x2
, y0, z0)−Hz(x0 −∆x2
, y0, z0))]
+ ẑ[∆y∆z
(Hy(x0 +
∆x2
, y0, z0)−Hy(x0 −∆x2
, y0, z0))
−∆x∆z(Hx(x0, y0 +
∆y2
, z0)−Hx(x0, y0 −∆y2
, z0))]}(1.1.21)
-
1.1 Maxwell’s Theory 13
Stokes TheoremThe ẑ component of (1.1.21) is
ẑ · (∇×H) = (∇×H)z =∂
∂xHy −
∂
∂yHx
= lim∆x→0∆y→0
1∆x∆y
{∆y
[Hy(x0 +
∆x2
, y0, z0)−Hy(x0 −∆x2
, y0, z0)]
−∆x[Hx(x0, y0 +
∆y2
, z0)−Hx(x0, y0 −∆y2
, z0)]}
The first term in the bracket is equal to the component Hy at x = x0 + ∆x2multiplied by the differential length ∆y . We define a vector differential lengthdl [Fig. 1.1.4] such that for the side ∆y at x = x0 + ∆x2 , dl = ŷdy ; forthe side ∆x at y0 + ∆y2 , dl = −x̂dx ; for the side ∆y at x = x0 − ∆x2 ,dl = −ŷdy ; and for the side ∆x at y = y0 − ∆y2 , dl = x̂dx . If we usethe fingers of the right hand to trace the direction of dl along the loop, theright-hand thumb points in the surface normal direction ẑ . Thus
ẑ
C
∆y
∆x
(x0, y0)
dl = −x̂dx
dl = ŷdy
Figure 1.1.4 Derivation of ẑ-component of the curl of a vector field.
ẑ · (∇×H) = lim∆x→0∆y→0
1∆S
∮C
dl ·H (1.1.22)
where C denotes the contour circulating the area ∆S = ∆x∆y . Similarresults are derivable for the x̂ and ŷ components of ∇×H . For a differentialarea ∆S with a surface normal in the direction of ŝ , we have
ŝ · (∇×H) = lim∆S→0
1∆S
∮C
dl ·H (1.1.23)
-
14 1. Fundamentals
We now apply (1.1.21) to an open surface S , subdivide into N differentialareas [Fig. 1.1.5]. For a differential area ∆Sj bounded by a contour Cj andwith a surface normal ŝj , we have ∆Sj = ŝj∆Sj and
∆Sj · (∇×H)j =∮Cj
dl ·H
Adding the contributions of all N differential areas [Fig. 1.1.5], we find
lim∆Sj→0N→∞
N∑j=1
∆Sj · (∇×H)j =∮C
dl ·H
C
C
∆S
CS
Figure 1.1.5 Derivation of Stokes’ theorem.
Since the common part of the contours in two adjacent elements is traversedin opposite directions by the two contours, the net contribution of all thecommon parts in the interior sums to zero and only the contribution from theexternal contour C bounding the open surface S remains in the line integralon the right-hand side. The left-hand side becomes a surface integral, and theresult is Stokes’ theorem:∫∫
dS · (∇×H) =∮C
dl ·H (1.1.24)
Stokes’ theorem states that the surface integral of the curl of the vector fieldH over an open surface S is equal to the closed line integral of the vectoralong the contour enclosing the open surface.
George Gabriel Stokes (13 August 1819 – 1 February 1903) was appointedLucasian Professor of Mathematics at Cambridge University in 1849. Hismathematical and physical papers were published in 5 volumes, the first 3 ofwhich Stokes edited himself in 1880, 1883 and 1891. The last 2 were editedby Joseph Larmor in 1887 and 1891.
-
1.1 Maxwell’s Theory 15
Maxwell Equations in Integral Form
Applying Stokes theorem to the Ampére’s law and Faraday’s law andapplying the divergence theorem to Gauss’ and continuity laws, we find
∮C
dl ·H =∫∫
dS · J +∫∫
dS · ∂∂t
D (1.1.25)
∮C
dl · E = −∫∫
dS · ∂∂t
B (1.1.26)
©∫∫
S
dS ·D =∫∫∫
V
dV ∇ ·D =∫∫∫
V
dV ρ (1.1.27)
©∫∫
S
dS ·B =∫∫∫
V
dV ∇ ·B = 0 (1.1.28)
©∫∫
S
dS · J = −∫∫∫
V
dV∂
∂tρ (1.1.29)
These are the integral form of Maxwell equations.
Oliver Heaviside (18 May 1850 – 3 February 1925)
The year after the publication of Maxwell’s Treatise of Electricity andMagnetism in 1873, Heaviside resigned from his job at age 24 and devotedall his time to the study of Maxwell’s theory. Despite of the criticism fromall the disbelievers, he remained the faithful decipher and declared himself aMaxwellian. He refuted the quaternion notation initiated by Hamilton andTait and developed the vector notation to cast Maxwell’s equation into theform as we show in this book.
-
16 1. Fundamentals
Cylindrical and Spherical Coordinate SystemsIn addition to the rectangular coordinates with unit vectors x̂, ŷ, ẑ , the
cylindrical coordinate system with unit vectors ρ̂, φ̂, ẑ , and the spherical co-ordinate system with unit vectors ρ̂, θ̂, φ̂ are often used in this book.
In a general orthogonal coordinate system, we use ûi (i = 1, 2, 3) todenote the three basis vectors, dli = hidui to denote a differential length,where hi is called a metric coefficient. The basis vectors are perpendicular toone another ûi · ûj = 0 for i �= j but they are not necessarily of unit length.In Table 1.1.1 we summarize the basis vectors and the metric coefficients forthe rectangular (or Cartesian), cylindrical, and spherical coordinate systems.
OrthogonalCoordinate System
RectangularCoordinates
(x, y, z)
CylindricalCoordinates
(ρ, φ, z)
SphericalCoordinates
(r, θ, φ)Base Vectors(û1, û2, û3) x̂, ŷ, ẑ ρ̂, φ̂, ẑ r̂, θ̂, φ̂
Metric Coefficients(h1, h2, h3) 1, 1, 1 1, ρ, 1 1, r, r sin θ
Differential Volume(h1h2h3du1du2du3) dxdydz ρdρdφdz r
2 sin θdrdθdφ
Table 1.1.1 Orthogonal coordinate systems.
In terms of the general orthogonal coordinate system, the gradient, thedivergence, the curl, and the Laplacian operators are defined as
∇Φ = û1∂Φ
h1∂u1+ û2
∂Φh2∂u2
+ û3∂Φ
h3∂u3
∇ ·D = 1h1h2h3
[∂
∂u1(h2h3D1) +
∂
∂u2(h3h1D2) +
∂
∂u3(h1h2D3)
]
∇×H = 1h1h2h3
∣∣∣∣∣∣∣h1û1 h2û2 h3û3∂
∂u1∂
∂u2∂
∂u3
h1H1 h2H2 h3H3
∣∣∣∣∣∣∣∇2Φ = ∇ · ∇Φ
=1
h1h2h3
[∂
∂u1h2h3
∂Φh1∂u1
+∂
∂u2h3h1
∂Φh2∂u2
+∂
∂u3h1h2
∂Φh3∂u3
]Identifying the metrics h1, h2, h3 with those as listed in Table 1.1.1, wereadily obtain the expressions in cylindrical and spherical coordinates.In the cylindrical coordinate system [Fig. 1.1.6],
Vector differential length dl = ρ̂dρ + φ̂ρdφ + ẑdz
Differential area dS = ρ̂ρdφdz + φ̂dρdz + ẑρdρdφ
Differential volume dV = ρdρdφdz
-
1.1 Maxwell’s Theory 17
x
y
φ
dz
ρ dφdz
dρdz
ρ dρdφ
dφ
z
ρ
Figure 1.1.6 Cylindrical coordinate system.
∇Φ = ρ̂ ∂Φ∂ρ
+ φ̂1ρ
∂Φ∂φ
+ ẑ∂Φ∂z
∇ ·D = 1ρ
∂
∂ρ(ρDρ) +
1ρ
∂
∂φDφ +
∂
∂zDz
∇×H = 1ρ
∣∣∣∣∣∣∣∣ρ̂ ρφ̂ ẑ
∂∂ρ
∂∂φ
∂∂z
Hρ ρHφ Hz
∣∣∣∣∣∣∣∣∇2Φ = ∇ · ∇Φ
=1ρ
∂
∂ρ
[ρ∂Φ∂ρ
]+
1ρ2
∂2Φ∂φ2
+∂2Φ∂z2
In the spherical coordinate system [Fig. 1.1.7],
Vector differential length dl = r̂dr + θ̂rdθ + φ̂r sin θdφ
Differential area dS = r̂r2 sin θdθdφ + θ̂r sin θdrdφ + φ̂rdrdθ
Differential volume dV = r2 sin θdrdθdφ
-
18 1. Fundamentals
θ
rφ
dφ
r sin θx
y
z
dθ
dr
Figure 1.1.7 Spherical coordinate system.
∇Φ = r̂ ∂Φ∂r
+ θ̂1r
∂Φ∂θ
+ φ̂1
r sin θ∂Φ∂φ
∇ ·D = 1r2
∂
∂r(r2Dr) +
1r sin θ
∂
∂θ(sin θDθ) +
1r sin θ
∂
∂φDφ
∇×H = 1r2 sin θ
∣∣∣∣∣∣∣∣r̂ rθ̂ r sin θφ̂∂∂r
∂∂θ
∂∂φ
Hr rHθ r sin θHφ
∣∣∣∣∣∣∣∣∇2Φ = ∇ · ∇Φ
=1r2
∂
∂r
[r2
∂Φ∂r
]+
1r2 sin θ
∂
∂θ
[sin θ
∂Φ∂θ
]+
1r2 sin2 θ
∂2Φ∂φ2
=1r
∂2
∂r2
[rΦ
]+
1r2 sin θ
∂
∂θ
[sin θ
∂Φ∂θ
]+
1r2 sin2 θ
∂2Φ∂φ2
Index NotationA vector in the Cartesian coordinate system can be represented by its
three components. Thus, Aj with j = 1, 2, 3 represents A1, A2, A3 of thevector A . The dot product A · B is written as AjBj where the repeatedindex j implies summation over j from 1 to 3:
AjBj =3∑
j=1
AjBj = A1B1 + A2B2 + A3B3
-
1.1 Maxwell’s Theory 19
To express cross products in index notation we need to define a Levi-Cevitasymbol εijk where i, j, k take values from 1 to 3. When any of the twoindices are equal the Levi-Cevita symbol is zero. Otherwise, εijk is either+1 or −1 . It is +1 if ijk is an even permutation of 1,2,3; −1 if ijk is anodd permutation of 1,2,3. Thus ε123 = ε231 = ε312 = 1 and ε213 = ε132 =ε321 = −1 and all others equal to 0. Let C = A× B . In index notation, wewrite Ci = εijkAjBk . Thus, C1 = ε123A2B3 + ε132A3B2 = A2B3 − A3B2 .The dyad AB is AjBk , no summation implied because no index is repeated.The identities (1.1.7) and (1.1.8) are
CiεijkAjBk = AjεjkiBkCi = BkεkijCiAjεijkCjεklmAlBm = (εijkεklm)CjAlBm = (δilδjm − δimδlj)CjAlBm
= AiCmBm − ClAlBi
where δij = 1 when i = j and δij = 0 when i �= j .In index notation, divergence of Dj , ∇ ·Dj , is ∂jDj .In index notation, ∇ is represented by ∂i and ∇φ by ∂iφ .In index notation, curl of Hi , ∇×Hi , is written as εijk∂jHk.The identities (1.1.9)–(1.1.12) are, in index notation
∂i(εijkEjHk) = εijkHk∂iEj + εijkEj∂iHk = Hkεkij∂iEj − Ejεjik∂iHk∂iεijk∂jAk = −εjik∂i∂jAk = 0εijk∂j∂kφ = −εikj∂j∂kφ = −εikj∂k∂jφ = 0
εijk∂jεklm∂lEm = (δilδjm − δimδjl)∂j∂lEm = ∂m∂iEm − ∂j∂jEi
Maxwell equations, when written in index notation, take the form:
εijk∂jHk = ∂tDi + Jiεijk∂jEk = ∂tBi
∂jDj = ρ
∂jBj = −∂tρ
where ∂t denotes partial derivative with respect to time.
Example 1.1.2 Poisson equation and Laplace equation.In (E1.1.1.1), we wrote the electric field vector as the gradient of a po-
tential function Φ :
E = −∇Φ (E1.1.2.1)
By virtue of (1.1.11), we see that ∇× E = 0 . Thus the above definition forthe electric field is true only when the term ∂B/∂t in Faraday’s law can be
-
20 1. Fundamentals
neglected, i.e., when there is no time variation. We may refer to the aboveelectric field as the static electric field. Derive an equation for Φ .
Solution:Coulomb’s law (or Gauss’ law for electricity) in free space is
∇ · E = ρ/oIn terms of the potential function, we obtain the Poisson equation
∇2Φ = −ρ/o (E1.1.2.2)In places where there is no charge density, ρ = 0 , we have the Laplaceequation ∇2Φ = 0 .
End of Example 1.1.2
Siméon Denis Poisson (21 June 1781 – 25 April 1840) studied mathematics atthe Ecole Polytechnique and was student of Pierre-Simon Laplace and Joseph-Louis Lagrange. His memoir on finite differences was written at age 18. Hiswell-known contributions include Poisson’s equation in potential theory wasdeveloped in 1829–1835.
Example 1.1.3The voltage Vab is defined as the integration of E along a line segment
of ' from point a to point b .
Vab =∫ ba
d' · E (E1.1.3.1)
Thus Vab is the potential difference between points a and b . For positiveVab , the electric field vector points from a to b . Point a is at a higherpotential Φa than Φb at point b , Φb < Φa and Vab = Φa − Φb .
End of Example 1.1.3
Example 1.1.4Maxwell’s equations were originally written in the form of scalar partial
differential equations. Written in terms of all field components, we find thatfor Ampère’s law,
∂
∂yHz −
∂
∂zHy =
∂
∂tDx + Jx (E1.1.4.1a)
∂
∂zHx −
∂
∂xHz =
∂
∂tDy + Jy (E1.1.4.1b)
∂
∂xHy −
∂
∂yHx =
∂
∂tDz + Jz (E1.1.4.1c)
-
1.1 Maxwell’s Theory 21
for Faraday’s law,
∂
∂yEz −
∂
∂zEy = −
∂
∂tBx (E1.1.4.2a)
∂
∂zEx −
∂
∂xEz = −
∂
∂tBy (E1.1.4.2b)
∂
∂xEy −
∂
∂yEx = −
∂
∂tBz (E1.1.4.2c)
for Coulomb’s law
∂
∂xDx +
∂
∂yDy +
∂
∂zDz = ρ (E1.1.4.3)
and for Gauss’ law
∂
∂xBx +
∂
∂yBy +
∂
∂zBz = 0 (E1.1.4.4)
Taking the sum of ∂(E1.1.4.1a)/∂x , ∂(E1.1.4.1b)/∂y , ∂(E1.1.4.1c)/∂z , andmaking use of (E1.1.4.3), we obtain
∂
∂xJx +
∂
∂yJy +
∂
∂zJz = −
∂
∂tρ (E1.1.4.5)
which is the continuity law. Given (E1.1.4.5), Coulomb’s law can be derivedfrom Ampère’s law. Likewise, Gauss’ law can be derived from Faraday’s law,∇ · B = Const , noticing that no static magnetic monopole is found to existand that Const = 0 . Thus (E1.1.4.3) and (E1.1.4.4) are not independentscalar equations, they can be derived from (E1.1.4.1) and (E1.1.4.2).
End of Example 1.1.4
Problems
P1.1.1Three vectors A, B , and C drawn in a head-to-tail fashion form the
three sides of a triangle. What is A + B + C and what is A + B − C ?P1.1.2
Prove |A×B|2 = A2B2 − (A ·B)2 by using C × (A×B) = A(C ·B)−(C ·A)B.P1.1.3
A position vector r = x̂√
2 + ŷ√
2 + ẑ2 . Determine its spherical compo-nents r, θ, φ and its cylindrical components ρ, φ, z .
-
22 1. Fundamentals
P1.1.4Find a unit vector ĉ that is perpendicular to both A = x̂4 + ŷ5 − ẑ3
and B = x̂2− ŷ7− ẑ1.5 .P1.1.5
Let A = x̂A , and the projection of another vector B on A be Bx =B cos θAB . What is A ·B in terms of the angle θAB between A and B ?P1.1.6
Assume A > B and draw a line projecting B on A . The line length h =B sin θAB , which is also related to A from h2 = |A−B|2− (A−B cos θAB)2by the cosine law in geometry. Show that A ·B = AB cos θABP1.1.7
The direction of A×B follows the right-hand rule, i.e., when the fingersof the right hand rotate from A to B , the thumb of the right hand pointsin the direction of A×B . Thus the vector A×B is perpendicular to bothA and B and the plane containing A and B . Let A = x̂Ax + ŷAy andB = x̂Bx + ŷBy both in the xy -plane, find A×B .P1.1.8
Using cos θAB = A ·B/AB , show that |A×B| = |AB sin θAB | .P1.1.9
For Φ(x) = x2 , and Φ(x) = −x3, what are their gradients?P1.1.10
The function Φ = x2+2y2 describes a family of ellipses. Find its gradientand show that ∇Φ is normal to the ellipse and pointing in the directions ofan expanding ellipse.
P1.1.11Consider the function Φ = x + y . Find the gradient of the function.
P1.1.12Prove the following identities:
∇ · (E ×H) = H · (∇× E)− E · (∇×H) (1.1.9)∇ · (∇×A) = 0 (1.1.10)∇× (∇Φ) = 0 (1.1.11)
∇× (∇× E) = ∇(∇ · E)−∇2E (1.1.12)
P1.1.13The six terms in (1.1.21) are associated with the six differential surfaces
bounding (x0, y0, z0) . For the first term, the surface normal is in the x̂ di-rection; we write dS = x̂∆y∆z . For the second term dS = −x̂∆y∆z . Forthe third term dS = ŷ∆z∆x , etc. Derive a curl theorem by integrating overthe volume similar to the divergence theorem.
-
1.1 Maxwell’s Theory 23
P1.1.14What is the result if the surface integral of ∇ × H is carried out over
a closed surface? Compare with Stokes Theorem in (1.1.24) and the curltheorem in P1.1.13 for the curl integrated over a volume V enclosed by asurface S .
P1.1.15For the vector A = ρ̂ρ2 + ẑ2z , verify the divergence theorem for the
circular cylindrical region enclosed by ρ = 5, z = 0 , and z = 3 .
P1.1.16Prove that [A× (∇×B)]i = Aj∂iBj − [(A · ∇)B]i .
P1.1.17Prove that ∇(A ·B) = (A ·∇)B+(B ·∇)A+A× (∇×B)+B× (∇×A).
P1.1.18Show that ∇(A ·A) = 2(A · ∇)A + 2A× (∇×A) .
P1.1.19Express static electric field vector as the gradient of a potential function
Φ =C√
x2 + y2 + z2
and find the electric field of a charge q from Maxwell equations.
-
24 1. Fundamentals
1.2 Electromagnetic Waves
A. Wave Equation and Wave Solution
The Maxwell equations in differential form are valid at all timesfor every point in space. First we shall investigate solutions to theMaxwell equations in regions devoid of source, namely in regions whereJ = 0 and ρ = 0 . This of course does not mean that there is no sourceanywhere in all space. Sources must exist outside the regions of interestin order to produce fields in these regions. Thus in source-free regionsin free space, the Maxwell equations become
∇×H = o∂
∂tE (1.2.1)
∇× E = −µo∂
∂tH (1.2.2)
∇ · E = 0 (1.2.3)
∇ ·H = 0 (1.2.4)
To derive an equation for the vector field E , we take curl of (1.2.2),substitute (1.2.1)
∇×∇× E = −µo∂
∂t∇×H = −µoo
∂2
∂t2E (1.2.5)
and make use of the vector identity ∇ × ∇ × E = ∇∇ · E − ∇2E .Noticing from (1.2.3) that ∇ · E = 0 , we have
∇2E − µoo∂2
∂t2E = 0 (1.2.6)
This is known as the Helmholtz wave equation. Solutions to the waveequation (1.2.6) that satisfy all Maxwell equations are electromagneticwaves.
Hermann Ludwig Ferdinand von Helmholtz (31 August 1821 – 8 September1894) was a professor of anatomy and physiology at the University of Bonn in1858, then became a professor of physics at the University of Berlin in 1871,and the first director of the Physico-Technical Institute of Berlin in 1888.His 3-volume Handbook of Physiological Optics appeared between 1856 and1867.
-
1.2 Electromagnetic Waves 25
Wave SolutionWe shall now study a solution to (1.2.6) assuming Ey = Ez = 0 .
Let Ex be a function only of z and t and independent of x and y .The electric field vector can be written as
E = x̂Ex(z, t)
The wave equation it satisfies follows from (1.2.6) which becomes
∂2
∂z2Ex − µoo
∂2
∂t2Ex = 0 (1.2.7)
The simplest solution to (1.2.7) takes the form
E = x̂Ex(z, t) = x̂E0 cos(kz − ωt) (1.2.8)
Substituting (1.2.8) in (1.2.7) we find that the following equation,called the dispersion relation, must be satisfied:
k2 = ω2µoo (1.2.9)
The dispersion relation provides an important connection between thespatial frequency k and the temporal frequency ω .
There are two points of view useful in the study of a space-timevarying quantity such as Ex(z, t) . The temporal view point is to exam-ine the time variation at fixed points in space. The spatial view pointis to examine spatial variation at fixed times, a process that amountsto taking a series of pictures.
From the temporal view point, we first fix our attention on oneparticular point in space, say z = 0 . We then have the electric fieldEx(z = 0, t) = E0 cosωt . Plotted as a function of time in Fig. 1.2.1,we find that the waveform repeats itself in time as ωt = 2mπ for anyinteger m. The period is defined as the time T for which ωT = 2π .The number of periods in a time of one second is the frequency fdefined as f = 1/T , which gives
f =ω
2π(1.2.10)
-
26 1. Fundamentals
ωt
Ex(z = 0, t) = E0 cosωt
π
2π
3π
ωT =
Figure 1.2.1 Electric field strength as a function of ωt at z = 0.
1 1 1
t t t
sec sec sec
Ex = E0 cos 2πfot Ex = E0 cos 4πfot Ex = E0 cos 6πfot
b. f = 2fo = 2Hz c. f = 3fo = 3Hza. f = 1fo = 1Hz
Figure 1.2.2 Electric field strength vs. t for different frequencies ω.
The unit for frequency f is Hertz (Hz) with 1 Hz = 1 s−1 , which isequal to the number of cycles per second. Since ω = 2πf , ω is theangular frequency of the wave.
In this book, we often refer to ω as the frequency, simply becauseω is more commonly encountered than f . The temporal frequency ωcharacterizes the variation of the wave in time. We plot in Fig. 1.2.2aEx(z = 0, t) as a function of t instead of ωt . Let there be one periodwithin the time interval of 1 second. Thus, f = fo = 1 Hz , and we letω = ωo = 2π rad/s. In Fig. 1.2.2b, we plot ω = 2ωo ; there are twoperiods in a time interval of one second and the period in time is 0.5seconds. In Fig. 1.2.2c, ω = 3ωo and there are three periods in onesecond.
-
1.2 Electromagnetic Waves 27
B. Unit for Spatial Frequency k
To examine wave behavior from the spatial view point, let ωt = 0 .The electric field becomes
Ex(z, t = 0) = E0 cos kz (1.2.11)
The electric field thus varies periodically in space. We plot Ex(z, t = 0)as a function of kz in Fig. 1.2.3. The waveform repeats itself periodi-cally in space when kz = 2mπ for integer values of m. The period ofone spatial variation is the wavelength λ defined as the distance forwhich kλ = 2π . The number of spatial variations per unit distance is
π
2π
3π
kz
kλ =
Ez(z, t = 0) = E0 cos kz
Figure 1.2.3 Electric field strength as a function of kz at t = 0.
k =2πλ
(1.2.12)
We call k the spatial frequency, which characterizes the spatial vari-ations of the field strength, similar to the temporal frequency whichcharacterized the temporal variations of the field strength. The spatialfrequency is also called the wavenumber as it is equal to the numberof wavelengths in a distance of 2π and has the dimension of inverselength.
Let me define for the spatial frequency k a fundamental unit Ko :
1 Ko = 2π rad/m (1.2.13)
Similar to the unit Hz which is cycles per second in temporal variation,Ko is cycles per meter in spatial variation. For a wave that has a spatial
-
28 1. Fundamentals
z z z
1 1 1m m m
Ex = E0 cos 1koz Ex = E0 cos 2koz Ex = E0 cos 3koz
a. k = 1ko = 1Ko b. k = 2ko = 2Ko c. k = 3ko = 3Ko
Figure 1.2.4 Electric field strength vs. distance z with different spatialfrequency k.
frequency of one period of spatial variation in one meter distance, wehave k = 1 Ko . An electromagnetic wave in free space with k = 3 Kohas three spatial variations in a distance of one meter.
We plot in Fig. 1.2.4a Ex(z, t = 0) as a function of z instead ofkz . There is one cycle of spatial variation within the wavelength of1 meter. Since Ko = 2π rad/m , we have k = 1 Ko = 2π rad/m . InFig. 1.2.4b, we plot k = 2 Ko ; there are two variations in a spatialdistance of one meter and the wavelength is 0.5 meters. In Fig. 1.2.4c,k = 3 Ko and there are three variations in one meter.
From the dispersion relation for electromagnetic waves (1.2.9), wesee that the spatial frequency and the temporal frequency are relatedby the velocity of light. Thus for a spatial frequency of 1 Ko , thecorresponding temporal frequency is f = 300 MHz . With k expressedin unit Ko , we find
f = 3× 108 k Hz ; λ = 1/k m (1.2.14)
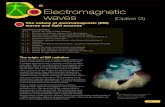
Within the spatial frequency range of 0.01 Ko to 100 Ko electromag-netic waves are used for microwave heating, radar, navigation, andcarrying signals from radio, television, and satellite communications.The visible light has a spatial frequency band between 1.4 × 106 ∼2.6×106 Ko . In Fig. 1.2.5 we illustrate the electromagnetic wave spec-trum according to the spatial frequency in Ko and corresponding wave-length in meters, frequency in Hz, and energy in electron-volts (eV).
-
1.2 Electromagnetic Waves 29
k λ
Ko
m
h̄ω f
eV
Hz
10−8
10−6
10−4
10−2
Ko
102
104
MKo
108
1010
1012
106
km
m
cm
mm
10−4
µ
10−8
Å
10−12
Hz
kHz
MHz
GHz
THz
1014
1016
1018
1020
eV
keV
MeVKo = 2π m−1k = AKoλ = 1/Amf = 300AMHzh̄ω = 1.24× 10−6A eV
γ-Ray
X-Ray
Ultraviolet
Visible (1.4 ∼ 2.6 MKo; 417 ∼ 789 )Near Infrared (0.77 ∼ 1.4 MKo;Thermal Infrared (0.067 ∼ 0.14 MKo;
Millimeter WaveEHF
SHF Radar C, X, Ku, K bands (13.3
470
GHz )
UHF
∼4
Microwave Oven (8.17Ko; 2.45 GHz )
VHF Television 890
FM
HF Short Wave Radio
MF AM Radio (.00178 .00535 K 535 ∼ 1605 kHz)
LF (10−4 ∼ 10−3 K
o
;
30 ∼ 300 kHz)
VLF (10−5 ∼ 10−4 Ko; 3 ∼ 30 kHz)
ULF (10−6 ∼ 10−5 Ko; 0.3 ∼ 3 kHz)
SLF (10−7 ∼ 10−6 Ko; 30 ∼ 300Hz)
ELF (10−8 ∼ 10−7 Ko; 3 ∼ 30 Hz)10 8
∼
o;
(.01 .001 K 3 ∼ 30 MHz )o ;∼
Radio (.29 .36 K 88 ∼ 108 MHz )o ;∼
90 K
MHz )∼Television (1.57 2.97 K
∼ 27
o ;∼(.18 .72 K 54 ∼ 216 MHz )o ;∼
o
Frequency Frequency( )) (Spatial Temporal
THz231 ∼ 417 )THz
20 ∼ 43 )THz
Figure 1.2.5 Electromagnetic wave spectrum.
-
30 1. Fundamentals
In this book I shall place great emphasis on the use of k , which isof more fundamental importance in electromagnetic wave theory thanboth of the more popular concepts of wavelength λ and frequency f .The corresponding values of wavelength λ and frequency f are, fork = AKo ,
λ = 2π/k = 2π/(AKo) =1A
m; f = ck/2π = cAKo/2π = 3×108AHz
The photon energy in electron-volts (eV) is calculated from
h̄ω = (h̄cAKo/q) eV ≈ 1.24× 10−6A eV = h̄ck/q eV
where q = 1.6 × 10−19 coulombs is the electron charge, and h̄ =1.05 × 10−34 Joule-second is Planck’s constant h = 6.626 × 10−34 J-sec divided by 2π .
Max Karl Ernst Ludwig Planck (23 April 1858 – 4 October 1947)Max Planck entered the University of Munich in 1874. He taught at
the University of Munich in 1880–1885, Kiel 1885–1889. After the death ofKirchhoff in 1887, Planck succeeded his chair of theoretical physics at theUniversity of Berlin in 1889 until his retirement in 1927. In 1900 he announceda formula now known as Planck’s radiation formula and introduced the quantaof energy.
Example 1.2.1 Operating frequencies of common devices:
Device Temporal frequency (Hz) Spatial frequency (Ko)AM Radio 535 – 1605 kHz 0.00178 – 0.00535 KoShortwave Radio 3 – 30 MHz 0.01 – 0.1 KoFM Radio 88 – 108 MHz 0.293 – 0.36 KoAirport ILS 108 – 112 MHz 0.35 – 0.373 KoCommercial Television
Channels 2-4 54 – 72 MHz 0.18 – 0.24 KoChannels 5-6 76 – 88 MHz 0.253 – 0.293 KoChannels 7-13 174 – 216 MHz 0.58 – 0.72 KoChannels 14-83 470 – 890 MHz 1.57 – 2.97 Ko
Microwave Oven 2.45 GHz 8.17 KoCommunication Satellite
Downlink 3.70 – 4.20 GHz 12.3 – 14 KoUplink 5.925 – 6.425 GHz 19.75 – 21.4 Ko
End of Example 1.2.1
-
1.2 Electromagnetic Waves 31
Phase Velocity and Phase Delay
In Figs. 1.2.6b and 1.2.6c we plot Ex(z, t) at two progressive timesωt = π/2 and ωt = π . We observe that the electric field vector at Aappears to be propagating along the ẑ direction as time progresses.The velocity of propagation Vp is determined from kz−ωt = constantwhich gives
Vp =dz
dt=
ω
k(1.2.15)
We call Vp the phase velocity. By virtue of the dispersion relation(1.2.9), we see that Vp = (µoo)−1/2 , which is equal to the velocity oflight in free space c .
Ex = E0 cos kz Ex = E0 sin kz Ex = −E0 cos kz
a. ωt = 0 b. ωt =π
2c. ωt = π
kz kz kz
A
A
A
Ex Ex Ex
π π π
2π 2π 2π
3π 3π 3π
Figure 1.2.6 Electric field strength vs. kz at different times.
The spatial frequency k is, according to the dispersion relation,directly related to the temporal frequency ω by the phase delay
Λp =k
ω=√µoo (1.2.16)
which determines how much time it takes for the wave to propagate aunit distance. In free space Λp = 10−8/3 s/m or it takes 3.33 nanosec-onds for an electromagnetic wave to travel the distance of one meter.
-
32 1. Fundamentals
EXAMPLE 1.2.2 Electric field vector E and magnetic field vector H.
A wave equation similar to (1.2.6) can be derived for the magnetic field vectorH. Wave solutions for E and H can be written as
E = x̂Ex(z, t) = x̂E0 cos(kz − ωt) (E1.2.2.1)H = ŷHy(z, t) = ŷH0 cos(kz − ωt) (E1.2.2.2)
It is seen that E and H satisfy (1.2.3) and (1.2.4). From (1.2.1), we find
∇×H =
∣∣∣∣∣∣∣∣
x̂ ŷ ẑ
∂
∂x
∂
∂y
∂
∂z
0 Hy 0
∣∣∣∣∣∣∣∣= x̂ kH0 sin(kz − ωt)
= ²o∂
∂tE = x̂ ω²oE0 sin(kz − ωt)
zMa
gnetic
Field H
Electric Field E
Figure E1.2.2.1 Electric and magnetic fields of an electromagnetic wave.
The magnitudes E0 and H0 are related by E0/H0 = k/ω²o =√
µo/²o = η,
where η =√
µo/²o is called the free-space impedance. The same result is obtainedby substituting (E1.2.2.1) and (E1.2.2.2) into (1.2.2). The electromagnetic waveis propagating in the positive ẑ direction. The field vectors of the electromagneticwave are transversal to the direction of propagation and lie in the xy-plane, onwhich the phase kz−ωt of the wave is a constant. Since the phase front of the waveis the xy-plane, we call the electromagnetic wave as represented by (E1.2.2.1) and(E1.2.2.2) a plane wave.
— END OF EXAMPLE 1.2.2 —
-
1.2 Electromagnetic Waves 33
C. Polarization
The polarization of a wave is conventionally defined by the time vari-ation of the tip of the electric field vector E at a fixed point in space.If the tip moves along a straight line, the wave is linearly polarized.When the locus of the tip is a circle, the wave is circularly polarized.For an elliptically polarized wave, the tip of E describes an ellipse.If the right-hand thumb points in the direction of propagation whilethe fingers point in the direction of the tip motion, the wave is de-fined as right-hand polarized. The wave is left-hand polarized when itis described by the left-hand thumb and fingers.
Consider the following wave solution:
E(z, t) = x̂Ex + ŷEy= x̂ cos(kz − ωt) + ŷA cos(kz − ωt + ψ) (1.2.17)
with A > 0 . The wave propagates in the +ẑ direction. From thetemporal view point,
E(t) = x̂ cos(ωt) + ŷA cos(ωt− ψ)
We now study polarization for the following special cases:Case 1) ψ = 2mπ , where m = 0, 1, 2, ... is an integer. We have
E(t) = x̂ cos(ωt) + ŷA cos(ωt)
The tip of the electric field vector moves along a line as shown inFig. 1.2.7a. The wave is linearly polarized.Case 2) ψ = (2m + 1)π , we have
E(t) = x̂ cos(ωt)− ŷA cos(ωt)
The tip of the electric field vector moves along a line as shown inFig. 1.2.7b. The wave is linearly polarized.Case 3) ψ = π/2 and A = 1 , we have
E(t) = x̂ cos(ωt) + ŷ sin(ωt) (1.2.18)
It can be seen that while the x component is at its maximum the ycomponent is zero. As time progresses, the y component increases andthe x component decreases. The tip of E rotates from the positive Ex
-
34 1. Fundamentals
Ey
Ey
Ey
Ey
Ey
Ex
Ex
Ex
Ex
Ex
a. Linear polarization b. Linear polarization
c. Right-handcircular polarization
d. Left-handcircular polarization
e. Right-handelliptical polarization
f. Left-handelliptical polarization
AA
Ey
Ex
AA
Figure 1.2.7 Polarizations.
-
1.2 Electromagnetic Waves 35
axis to the positive Ey axis [Fig. 1.2.7c]. Elimination of t from the xand y components in (1.2.18) yields a circle of radius 1 , E2x+ E
2y = 1 .
Thus the wave is right-hand circularly polarized.Case 4) ψ = −π/2 and A = 1 , we have
E(t) = x̂ cos(ωt)− ŷ sin(ωt) (1.2.19)
As time progresses, the y component increases and the x compo-nent decreases. The tip of E rotates from the positive Ex axis tothe negative Ey axis. Thus the wave is left-hand circularly polarized[Fig. 1.2.7d].Case 5) ψ = ±π/2 , we have
E(t) = x̂ cos(ωt)± ŷA sin(ωt) (1.2.20)
The wave is right-hand elliptically polarized for ψ = π/2 [Fig. 1.2.7e]and left-hand elliptically polarized for ψ = −π/2 [Fig. 1.2.7f].
A
ψ
12 1 22
Figure 1.2.8 Polarizations for various values of ψ and A.
The above discussion can be summarized in Fig. 1.2.8 where weillustrate the polarization for different values of A and ψ . On thehorizontal axis, ψ = 0, or π, the wave is linearly polarized. If A = 1and ψ = π/2, the wave is right-hand circularly polarized. For A = 1and ψ = −π/2, the wave is left-hand circularly polarized. Otherwisethe wave is elliptically polarized. The polarization is right-handed ifthe phase difference is between zero and π, and left-handed if ψ isbetween π and 2π.
-
36 1. Fundamentals
Example 1.2.3 Polarization from the spatial view point.Wave polarization can be viewed by either taking a series of still pictures
at several fixed times, called the spatial view point or by making observationsat a fixed point in space, called the temporal view point. The definition ofpolarization so far has been discussed from the temporal view point. Let usnow look at polarization from the spatial view point.
x
y
z
z = zo E|t=to
E|t=t+k̂
Figure E1.2.3.1 Spatial view of polarization.
Consider the right-hand circularly polarized wave with ψ = π/2 andA = 1 in case 3), setting t = 0 in wave solution (1.2.17), we have
E(z, t = 0) = x̂ cos(kz)− ŷ sin(kz) = x̂Ex(z)− ŷEy(z)
This is a left-handed helix as shown below.
Ex = E0 cos(2π
λz)
Ey = E0 sin(2π
λz)
The parametric equation of a helix is
x = R cos(
2πpz
)y = R sin
(2πpz
)r
where p is the pitch of the helix. Thus, the locus of the tip point of the electricfield vector measured along the z axis is a left-handed helix with the pitchp = λ. The helix advances along +ẑ without rotating. At z = z0 = 3λ/4 ,electric field vector is at E|t=to when to = 0 , it is shown as E|t=t+ whent+ = π/4ω .
End of Example 1.2.3
-
1.2 Electromagnetic Waves 37
Poincaré Sphere and Stokes ParametersWe now use the ellipse as shown in Fig. 1.2.9 to illustrate all polariza-tion states by introducing two parameters: polarization angle α andorientation angle β . We let the major axis of the ellipse be e1 andthe minor axis e2 ≤ e1 . The shape of the ellipse can be specified bythe ellipticity angle α defined as
tanα = ±e2e1
(1.2.21)
where the plus sign corresponds to right-hand polarization for which0 ≤ α ≤ π/4 and the negative sign to left-hand polarization for which−π/4 ≤ α ≤ 0. We see that for linearly polarized wave α = 0 . For asis evident from the defining equation for Fig. 1.2.9.
Exα
Ey
e1
e2
Figure 1.2.9 Elliptical polarization.
E(t) = x̂ cosωt + ŷA sinωt (1.2.22)
For right-hand circularly polarized waves, α = −π/4 and e2 = e1 ,for left-hand circularly polarized waves, α = −π/4 and e2 = e1 . Forright-hand polarization, α ≥ 0 , for left-hand polarization, α ≤ 0 .
The orientation angle β is introduced with Fig. 1.2.10 by rotatingthe ellipse in Fig. 1.2.9. The major axis of the ellipse is rotated andmakes the angle β with the Ex axis with 0 ≤ β ≤ π. Thus for alinearly polarized wave along the Ey− axis, β = π/2 .
Instead of the planar representation of polarization states as shownin Fig. 1.2.8, we shall now discuss representation of polarization stateswith a sphere called Poincaré sphere as shown in Fig. 1.2.11. The radius
-
38 1. Fundamentals
E x
E y
e 1
e 2
Figure 1.2.10 Elliptical polarization.
of the sphere is I , and the three axes are Q, U, V as shown below:
Q = I cos 2α cos 2β
U = I cos 2α sin 2β
V = I sin 2α
Q
V
U
Figure 1.2.11 Poincare sphere.
We see that I2 = Q2 + U2 + V 2. When the wave is right-hand cir-cularly polarized Q = U = 0, V = I , as α = π/4. When thewave is left-hand circularly polarized, Q = U = 0, V = −I , as α =−π/4. When the wave is linearly polarized, V = 0, as α = 0. With a
-
1.2 Electromagnetic Waves 39
rigorous mathematical derivation, I,Q, U, V can be derived from exand ey , and they are called Stokes parameters, which are useful incharacterizing polarized as well as unpolarized electromagnetic waves.
Jules Henri Poincaré (29 April 1854 – 17 July 1912)Henri Poincaré entered the Ecole Polytechnique in 1873, graduating in
1875, and received his doctorate in mathematics from the University of Parisin 1879. In 1886 he was appointed to a chair of mathematical physics andprobability at the Sorbonne and also at the Ecole Polytechnique. In 1894, hepublished the first of his six papers on algebraic topology.
Example 1.2.4To facilitate a mathematical discussion of polarization, we decompose
the E vector of a wave into two components perpendicular to the directionof propagation. For a specific point in space, we write
E(t) = x̂Ex + ŷEy = x̂ex cos(ωt− ψx) + ŷey cos(ωt− ψy) (E1.2.4.1)where x̂ , ŷ , and the direction of propagation are mutually perpendicularand thus form an orthogonal system. We assume the amplitudes ey and exare both positive. The locus of the tip E(t) is determined by eliminating thetime t dependence between the two components Ex and Ey .
In general, a polarized wave has elliptical polarization; that is, when timeis eliminated from the two components of E , the resultant equation describesan ellipse. Consider the case ψx = ψ0, ψy −ψx = ±π/2 in (E1.2.4.1) and letex = e1 > e2 = ey. We have
E′(t) = x̂′E′x + ŷ′E′y = x̂′e1 cos(ωt− ψ0) + ŷ′e2 sin(ωt− ψ0) (E1.2.4.2)
with e1 denoting the major axis and e2 the minor axis, we write
tanα =e2e1
(E1.2.4.3)
where −π/4 ≤ α ≤ π/4 .The general polarization states are more popularly described with the
Poincaré sphere as discussed below. Consider the elliptical polarization asgiven by (E1.2.4.1), which describes a tilted ellipse as plotted in Fig. 1.2.10.The major axis of the ellipse described in (E1.2.4.2) is rotated and makes theangle β with the Eh axis with 0 ≤ β ≤ π. We call β the orientation angle.
In view of (E1.2.4.2) and Fig. 1.2.9, we have from coordinate transfor-mation
E′x = Ex cosβ + Ey sinβ
E′y = −Ex sinβ + Ey cosβ
-
40 1. Fundamentals
leading to
e1 cos(ωt− ψ0) = Ex cosβ + Ey sinβ (E1.2.4.4a)e2 sin(ωt− ψ0) = −Ex sinβ + Ey cosβ (E1.2.4.4b)
Substituting the components Eh and Ev of (E1.2.4.1) in (E1.2.4.4) andcomparing the coefficients of cosωt and sinωt , we obtain
e1 cosψ0 = ex cosψx cosβ + ey cosψy sinβ (E1.2.4.5a)e1 sinψ0 = ex sinψx cosβ + ey sinψy sinβ (E1.2.4.5b)e2 cosψ0 = −ex sinψx sinβ + ey sinψy cosβ (E1.2.4.5c)e2 sinψ0 = ex cosψx sinβ − ey cosψy cosβ (E1.2.4.5d)
Eliminating ψ0 from (E1.2.4.5a) and (E1.2.4.5b) , we find
e21 = e2x cos
2 β + e2y sin2 β + exey sin 2β cosψ (E1.2.4.6a)
Similarly from (E1.2.4.5c) and (E1.2.4.5d) , we have
e22 = e2x sin
2 β + e2y cos2 β − ehev sin 2β cosψ (E1.2.4.6b)
Multiplying (E1.2.4.5a) by (E1.2.4.5c), (E1.2.4.5b) by (E1.2.4.5d) and thenadding, we again eliminate ψ0 and obtain
e1e2 = exey sinψ (E1.2.4.6c)
Finally we multiply (E1.2.4.5a) by (E1.2.4.5d) and subtract from the prod-uct of (E1.2.4.5b) and (E1.2.4.5c) , which yields
2exey cosψ = (e2x − e2y) tan 2β (E1.2.4.6d)
Equation (E1.2.4.6) will be used in the following discussion on Stokes param-eters and the Poincaré sphere.
To facilitate the discussion of various polarization states of electromag-netic waves, the four Stokes parameters pertaining to E(t) given in (E1.2.4.1)are defined as follows :
I =1η
(e2x + e
2y
)(E1.2.4.7a)
Q =1η
(e2x − e2y
)(E1.2.4.7b)
U =2ηexey cosψ (E1.2.4.7c)
V =2ηexey sinψ (E1.2.4.7d)
-
1.2 Electromagnetic Waves 41
Notice that I2 = Q2 + U2 + V 2.Adding (E1.2.4.6a) and (E1.2.4.6b) yields e21 + e
22 = e
2x + e
2y = ηI .
Making use of (E1.2.4.3), we have
e21 = ηI cos2 α (E1.2.4.8)
Subtracting (E1.2.4.6b) from (E1.2.4.6a) and making use of (E1.2.4.6d) , wefind e21 − e22 = (e2x − e2y)/ cos 2β . Making use of (E1.2.4.3) and (E1.2.4.8) ,we find
Q =1η(e2x − e2y) = I cos 2α cos 2β (E1.2.4.9a)
In terms of I , we find from (E1.2.4.7c) , (E1.2.4.6d) and (E1.2.4.9a)
U = I cos 2α sin 2β (E1.2.4.9b)
and from (E1.2.4.7d) , (E1.2.4.6c) and (E1.2.4.8)
V = I sin 2α (E1.2.4.9c)
Equation (E1.2.4.9) suggests a simple geometrical representation of all statesof polarization by recognizing that Q, U, and V can be regarded as therectangular components of a point on a sphere with radius I , known as thePoincaré sphere. We define, in the spherical coordinate system, θ = π/2−2αand φ = 2β. As seen from (E1.2.4.3), positive α is for right-hand polariza-tion which is represented by points on the upper hemisphere. On the lowerhemisphere, the points correspond to left-hand polarization. The north polerepresents right-hand circular polarization and the south pole represents left-hand circular polarization. The sphere is called the Poincaré sphere. Fig. 1.2.8is seen to be a planar projection of the Poincaré sphere with the plane andthe sphere touching each other at Q = I. The equator is mapped into thehorizontal axis.
End of Example 1.2.4
Example 1.2.5 Partial polarization.Radiation from many natural and man-made sources consists of field
components that fluctuate with time. We write
Eh = eh(t) cos(ωt− ψh(t)
)Ev = ev(t) cos
(ωt− ψv(t)
)The wave is quasi-monochromatic when eh(t), ev(t), ψh(t), and ψv(t) areslowly varying compared with cosωt. The Stokes parameters are defined by
-
42 1. Fundamentals
a time-average procedure over a large time interval T , denoted with thebrackets :
=1T
∫ T0
dt [Eh(t)]2
The Stokes parameters are
I = Ih + Iv =1η
( +
)Q = Ih − Iv =
1η
( −
)= I
U =2η= I
V =2η= I
For completely unpolarized waves, Eh and Ev are uncorrelated and we haveI = total Poynting power and Q = U = V = 0. For completely polarizedwaves we have I2 = Q2 + U2 + V 2. For partially polarized waves it can beshown that I2 ≥ Q2 +U2 + V 2 [Example 1.2A.2]. With the Poincaré sphereof radius I , the partially polarized waves correspond to points inside thesphere.
In concluding this section on wave polarization, we remark that the po-larization is defined according to the time variations of the E vector. As weshall see in Chapter 3, it is imperative that we define polarization in terms ofD when anisotropic and bianisotropic media are involved. This is because inisotropic media E is perpendicular to k , k · E = 0, while in non-isotropicmedia k ·D = 0. This also suggests that wave polarization can be defined interms of the field vector B .
End of Example 1.2.5
Problems
P1.2.1Electromagnetic waves satisfy all of the Maxwell equations. Consider, in
free space, the following electric field vectors:
E1 = x̂ cos(ωt− kz)E2 = ẑ cos(ωt− kz)E3 = (x̂ + ẑ) cos(ωt + ky)
E4 = (x̂ + ẑ) cos(ωt + k|x + z|/
√2)
-
1.2 Electromagnetic Waves 43
Do these electric field vectors satisfy the wave equation and all Maxwell equa-tions? Which of the four fields qualify as electromagnetic waves? For thosenot qualified as electromagnetic waves, state which of the Maxwell equationsare violated.
P1.2.2
The electric field vector
E = x̂E0 cos(kz − ωt)
represents an electromagnetic wave propagating in the +ẑ direction. Whatis the expression if the wave is propagating in the −ẑ direction?P1.2.3
An electromagnetic wave has spatial frequency ko = 100 Ko. Determinethe wavelength in meters and the temporal frequency in GHz.
Determine the spatial frequency in unit of Ko for a laser light at wave-length λ = 0.6328µm .
Determine the spatial frequency in unit of Ko for a microwave oven atfrequency 2.4 GHz.
P1.2.4
The known spectrum of electromagnetic waves covers a wide range offrequencies. Electromagnetic phenomena are all described by Maxwell’s equa-tions and, by convention, are generally classified according to wavelengths orfrequencies. Radio waves, television signals, radar beams, visible light, X rays,and gamma rays are examples of electromagnetic waves.(a) Give in meters the wavelengths corresponding to the following frequen-
cies:(i) 60 Hz(ii) AM radio (535–1605 kHz)(iii) FM radio (88–108 MHz)(iv) Visible light (∼ 1014 Hz)(v) X-rays (∼ 1018 Hz)
(b) Give in Hertz the temporal frequencies corresponding to the wavelengths:(i) 1 km, (ii) 1 m, (iii) 1 mm, (iv) 1 µm , (v) 1 Å.
(c) Give in Ko the spatial frequencies corresponding to the wavelengths in(b).
(d) Give in eV the spatial frequencies corresponding to the wavelengths in(b).
P1.2.5
Consider the electric field amplitude
Ex(z, t) = E0 cos(kz − ωt)
Find the phase velocity vp = ω/k and the group velocity vg = dω/dk .
-
44 1. Fundamentals
P1.2.6Consider an electromagnetic wave propagating in the ẑ-direction with
E = x̂ex cos(kz − ωt + ψx) + ŷey cos(kz − ωt + ψy)
where ex , ey , ψx , and ψy are all real numbers.(a) Let ex = 2, ey = 1, ψx = π/2, ψy = π/4. What is the polarization?(b) Let ex = 1, ey = ψx = 0. This is a linearly polarized wave. Prove that it
can be expressed as the superposition of a right-hand circularly polarizedwave and a left-hand circularly polarized wave.
(c) Let ex = 1, ψx = π/4, ψy = −π/4, ey = 1. This is a circularly polarizedwave. Prove that it can be decomposed into two linearly polarized waves.
P1.2.7Wave polarization can be viewed by either taking a series of still pictures
at several fixed times, called the spatial view point or by making observationsat a fixed point in space, called the temporal view point. We define polariza-tion from the temporal view point. Let us now look at polarization from thespatial view point.
Consider an electromagnetic wave with k = 100 Ko propagating in theẑ direction.
E(r, t) = E0[x̂ cos(kz − ωt)− ŷ sin(kz − ωt)]
What are the wavelength and the polarization of this wave?From the spatial point of view, by taking a picture at t = 0 , the tips of
the electric field vectors form a helix. Is the helix right-handed or left-handed?What is the pitch of this helix?
Observing at a fixed point in space, show that the tip of the electric fielddescribes the same polarization as in the temporal view point when the helixadvances without turning.
P1.2.8For polarized waves
I = Ih + IvQ = Ih − Iv = I cos 2α cos 2βU = I cos 2α sin 2β
V = I sin 2α
Show that when the wave is right-handed circularly polarized Q = U = 0 andV = I, when it is left-hand circularly polarized, Q = U = 0 and V = −I,and when the wave is linearly polarized, V = 0.
-
1.3 Force, Power, and Energy 45
1.3 Force, Power, and Energy
A. Lorentz Force Law
The interaction of the electric and magnetic fields with the currentand charge densities are governed by the Lorentz force law
f = ρE + J ×B (1.3.1)where f is the force density (with unit N/m3) . The Lorentz forcelaw relates electromagnetism to mechanics. The manifestation of theelectric field vector E and the magnetic field vector B can be demon-strated with the forces exerted on the charge density ρ and the currentdensity J . It can thus be used to define the fields E and B .
Hendrik Antoon Lorentz (18 July 1853 – 4 February 1928)Hendrik Lorentz entered the University of Leyden in 1870, obtained his
B.Sc. degree in 1871, and in 1875, his doctor’s degree for his thesis on thereflection and refraction of light. Three years later he was appointed to theProfessor of Physics at Leyden. In 1904 he developed the Lorentz transfor-mation formula that form the basis for the special theory of relativity .
Example 1.3.1 Coulomb’s law.For static electric fields in the absence of magnetic fields, the Lorentz
force law becomes f = ρE. Acting on a charged particle q , the total force isF = qE . Assuming that the electric field E is generated by another chargedparticle Q situated at the origin, we have
E = r̂Q
4πor2
Thus the total force acting on the charged particle q is
F = r̂qQ
4πor2
which is proportional to the squared inverse distance. This is the well-knownCoulomb’s law.
End of Example 1.3.1
Issac Newton (25 December 1642 – 20 March 1727)Newton attended Cambridge University at the age of 19 and entered
Trinity College in 1661. After receiving his B.A. degree in 1664, he returnedto his birth place Woolsthorpe, England. In the next two years, he extendedthe binomial theorem, invented calculus, discovered the law of universal grav-itation, and experimentally proved that white light is composed of all colors,all these great accomplishments in scientific history before his 25th birthday.
-
46 1. Fundamentals
Example 1.3.2 Cyclotron frequency.Consider a particle with charge q and mass m moving with velocity
v in a uniform static magnetic field in the −ẑ direction, B = −ẑB0 . Inthe absence of electric fields, if the velocity v has no component in the ẑdirection, the Lorentz force is perpendicular to the direction of the velocityand the charge particle moves in the x-y plane. Let v = x̂vx + ŷvy , we have
F = qv ×B = −x̂qvyB0 + ŷqvxB0
Equating to Newton’s law
F = mdv
dt= x̂m
dvxdt
+ ŷmdvydt
we find
mdvxdt
= −qvyB0 (E1.3.2.1a)
mdvydt
= qvxB0 (E1.3.2.1b)
Eliminating vy from the above two equations, we find
d2vxdt2
= −ω2cvx
where
ωc =qB0m
(E1.3.2.2)
x
y
v
Figure E1.3.2.1 Cyclotron frequency.
-
1.3 Force, Power, and Energy 47
is called the cyclotron frequency, which is proportional to the magnitude ofthe magnetic field and is independent of the velocity of the particle.
The solution to (E1.3.2.1) can be written as
vx =dx
dt= v cosωct (E1.3.2.3a)
vy =dy
dt= v sinωct (E1.3.2.3b)
To find the trajectory of the particle, we write the solution of (E1.3.2.3) as
x =v
ωcsinωct = R sinωct (E1.3.2.4a)
y = − vωc
cosωct = −R cosωct (E1.3.2.4b)
The trajectory of the particle is thus a circle with radius
R = (x2 + y2)1/2 =v
ωc(E1.3.2.5)
In terms of the applied magnetic field, we find from (E1.3.2.2)
R =mv
qB0(E1.3.2.6)
It is seen that the larger the magnetic field, the smaller the radius. If thecharged particle has a velocity component in the ẑ direction, the trajectoryof the particle will follow a helical path.
End of Example 1.3.2
Exercise 1.3.1 Centrifugal force.In cylindrical coordinate system, ρ is the radial vector and ρ̂ is in the
radial direction. The force acting on the charge in the above example is
F = x̂md2x
dt2+ ŷm
d2y
dt2= m
d2
dt2ρ
= mRω2c (−x̂ sinωct + ŷ cosωct) = −mω2c (x̂x + ŷy)
= −mρ̂Rω2c = −ρ̂mv2
R(Ex1.3.1.1)
which is equal to the negative of the centrifugal force pointing in the ρ̂ di-rection, whose magnitude is equal to the Lorentz force ρ̂qvBo .
End of Exercise 1.3.1
-
48 1. Fundamentals
Example 1.3.3 Cyclotron.A cyclotron [Fig. E1.3.3.1] is an accelerator for charged particles. The
a.c. source provides an alternating voltages at the cyclotron frequency anda charged particle is repeatedly accelerated every time it passes through thevoltage drop.
Uniform B field
a.c. source
Figure E1.3.3.1 Cyclotron.
End of Example 1.3.3
Example 1.3.4 Isotope separation.To separate the isotope Uranium 235 from Uranium 238, the isotopes are
first vaporized and then ionized by electric discharge. Accelerated through avoltage drop V , they acquire a kinetic energy qV = mv2/2 . Passing through[Fig. E1.3.4.1] a uniform magnetic field, the isotopes move along circular pathsof different radii.
Uniform B field
m235m238 +
−V
Figure E1.3.4.1 Isotope separation.
R235R238
=m235v235m238v238
=m235m238
√m238m235
=√
m235m238
Thus Uranium 235 can be obtained in a collector with a smaller radius.End of Example 1.3.4
-
1.3 Force, Power, and Energy 49
Example 1.3.5The two rods attract each other when their currents are in the same
direction and are repulsive when their currents are in the opposite directions.
I1 I2
FF
I1 I2
F F
Figure E1.3.5.1 Attractive and repulsive forces.
End of Example 1.3.5
Example 1.3.6 Linear motor.In Fig. E1.3.6.1, we show a sliding bar with length l moving perpendic-
ular to a DC magnetic field B = ẑB0 in the ẑ direction. According to theLorentz force law, a force
Fm = ŷIl × ẑB0 = x̂IlB0is produced that moves the sliding bar in the x̂ direction.
sliding bar
Fm
x
y
V
Figure E1.3.6.1 Linear motor.
If a force is applied to move the sliding bar with velocity v = −x̂ , aninduced voltage V = vlB0 will be generated across the resistor.
End of Example 1.3.6
-
50 1. Fundamentals
Example 1.3.7 Magnetic moment and magnetic torque.A rectangular loop [Figure E1.3.7.1] carrying a static current I is placed
in a static magnetic field B = x̂B0 . The magnetic moment of the currentloop is M = m̂M . Its direction m̂ follows from the right-hand rule: with thefingers pointing in the direction of the current, the thumb of the right hand ispointing in the direction of m̂ . Its magnitude M is equal to the area of theloop A times the cu