Electrodynamics of Continua II: Fluids and Complex Media
375
Electrodynamics of Continua II
Transcript of Electrodynamics of Continua II: Fluids and Complex Media
ElectrodynaDlics of Continua II Fluids and Complex Media
With 56 Illustrations
Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong
A.C. Eringen Princeton University Princeton, N.J. 08544 U.S.A.
G.A. Maugin Laboratoire de Modelisation
en Mecanique Universite Pierre et Marie
Curie et C.N.R.S. 75252 Paris 05 France
Library of Congress Cataloging in Publication Data Eringen, A. Cerna!.
Electrodynamics of continua / A.C. Eringen, G.A. Maugin. p. cm.
Includes bibliographical references. Contents: I. Foundations and solid media - 2. Fluids and complex media.
I. Fluid mechanics. 2. Electrodynamics. 3. Magnetohydrodynamics. mechanics. I. Maugin, G. A. (Gerard A.), 1944-
4. Continuum
Printed on acid-free paper
Softcover reprint of the hardcover 1st edition 1990
89-21880 CIP
All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer-Verlag, 175 Fifth Avenue, New York, NY 10010, U.S.A.), except for brief excerpts in connection with reviews or scholarly analysis. Use in connec tion with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use of general descriptive names, trade names, trademarks, etc., in this publication, even if the former are not especially identified, is not to be taken as a sign that such names, as understood by the Trade Marks and Merchandise Marks Act, may accordingly be used freely by anyone.
Typeset by Asco Trade Typesetting Ltd., Hong Kong.
987 6 543 2 1
ISBN-13: 978-1-4612-7928-0
DOl: 10.1007/978-1-4612-3236-0
Preface to Volume II
The first volume of Electrodynamics of Continua was devoted mainly to the development of the theory of, and applications to, deformable solid media. In the present volume we present discussions on fluid media, magneto hydro dynamics (MHD) (Chapter 10), electrohydrodynamics (Chapter 11), and media with more complicated structures. Elastic ferromagnets (Chapter 9) and ferrofluids (Chapter 12) require the inclusion of additional degrees of free dom, arising frQm spin-lattice interactions and supplementary balance equations.
With the discussion of memory-dependent materials (Chapter 13) and nonlocal electromagnetic theory (Chapter 14), we account for the nonlocal effects arising from motions and fields of material points, at past times and at spatially distant points. Thus, the damping of electromagnetic elastic waves, photoelasticity, and streaming birefringence are the subjects of Chapter 13. Nonlinear constitutive equations developed here, and in Chapter 14, are fundamental to the field of nonlinear optics and nonlinear magnetism. The content of these chapters is mostly new and is presently in the development stage. However, they are included here in the hope that they will stimulate further research in these important fields.
Volume II is self-contained and can be studied without the help of Volume I. However, certain prerequisites are necessary. In order to provide quick access to the basic equations and the underlying physical ideas, we have included a section (Section 9.0) in Chapter 9, where the constitutive equations for electromagnetic fluids are also presented. This section serves as a founda tion for the fluid media discussed in Chapters 10 and 11. Basic equations and the underlying physical ideas, necessary for each chapter, are presented at the beginning of each chapter.
TIle second volume extends the development of the first volume to richer and newer grounds. Because of space limitations, and the logical development and continuity of the text, recent developments in mixtures, semiconductors, superconductivity, nonlinear optics, and electronic theories could not be included.
It can be said that the electrodynamics of continua touches every aspect of
VI Preface to Volume II
the world of physics. In this regard, the present volume hopes to stimulate certain aspects. This volume may be used as a basis for several graduate courses in engineering schools, applied mathematics, and physics departments. It also contains fresh ideas and directions for further research. Ferromag netism and plasticity, memory-dependent materials as applied to polymers, nonlinear optics, and the nonlocal theory developed in Chapter 14 are can didates for deeper research, penetrating into microscopic and atomic scale phenomena.
Nonlocal theory (Chapter 14) is still in its infancy. However, it is a parallel discipline to the well-developed field oflattice dynamics. It has the advantage that it can be used to discuss physical phenomena in intermediate scales between microscopic and atomic dimensions.
Electromagnetic theory properly falls into the domain of the theory of relativity. Consequently, we have included a chapter (Chapter 15) on this subject to close this volume.
Contents (Volume II)
CHAPTER 9
Elastic Ferromagnets. 437
9.0. An Overview of Basic Equations 437 9.l. Scope of the Chapter. 443 9.2. Model of Interactions 444
A. Gyroscopic Nature of the Spin Density. 445 B. Spin-Lattice Model ofInteractions. 446
9.3. Balance Equations 449 A. Global Balance Equations 449 B. Local Balance Equations 450 C. The Clausius-Duhem (C-D) Inequality 452 D. Boundary Conditions 453
9.4. Constitutive Theory . 453 A. Saturated Ferromagnetic Elastic Insulators 453 B. Free Energy 456 C. Correspondence Between the Microscopic Model and the
Continuous Representation . 458 D. Infinitesimal Strains . 460 E. Centro symmetric Cubic Crystals 461 F. Uniaxial Crystals. 463 G. Elementary Dissipative Processes 464 H. Small Fields Superposed on a Constant Bias Magnetic Field 466
9.5. Resume of Basic Equations . 469 9.6. Coupled Magnetoelastic Waves in Ferromagnets . 472
A. Preliminary Remarks 472 B. Plane Harmonic Waves. 474 C. Damping of Magnetoelastic Waves. 482 D. Magnetoelastic Faraday Effect . 484
9.7. Applications of the Magnon-Phonon Coupling 487 A. Pumping and Temporal Magnon-Phonon Conversion 487 B. Drift-Type Amplification of Magnetoelastic Waves 490
viii Contents (Volume II)
9.8. Other Works. 490 A. Continuum Descriptions of Ferromagnetic Deformable Bodies. 490 B. Wave Propagation . 491 C. Ferrimagnetic Deformable Bodies. 492 Problems. 497
CHAPTER 10
Magnetohydrodynamics .
10.1. Scope of the Chapter 10.2. Basic Equations of Electromagnetic Fluids 10.3. Magnetohydrodynamic Approximation 10.4. Perfect Magnetohydrodynamics
A. Field Equations. B. "Frozen-In" Fields . C. Bernoulli's Equation in Magnetohydrodynamics. D. Kelvin's Circulation Theorem in Magnetohydrodynamics E. Alfven Waves F. Generalized Hugoniot Condition .
10.5. Incompressible Viscous Magnetohydrodynamic Flow A. Magnetohydrodynamic Poiseuille Flow B. Magnetohydrodynamic Couette Flow.
10.6. One-Dimensional Compressible Flow. 10.7. Shock Waves in Magnetohydrodynamics.
A. Classification of Magnetohydrodynamic Shock Waves B. Shock Structure .
10.8. Magnetohydrodynamic Equilibria. 10.9. Equilibrium of Magnetic Stars. 10.10. Magnetohydrodynamic Stability .
A. The Energy Method B. Equilibrium States and Perturbations. C. Quantities Conserved in the Perturbation D. Elementary Perturbations . E. Change in the Energy Integrals F. Application to the Linear Pinch Problems.
CHAPTER II
502
502 503 507 512 512 513 514 515 515 516 518 518 520 521 525 526 530 530 533 537 537 539 540 540 543 545 547
Electrohydrodynamics 551
11.1. Scope of the Chapter 551 11.2. Field Equations. 552 11.3. Charge Relaxation . 554 1 i.4. Stability Condition . 554 11.5. Helmholtz and Bernoulli Equations 555
A. Generalization of the Helmholtz Equation 555 B. Vorticity Generation in a Space-Charge-Loaded Electric Field. 556 C. Generalization of Bernoulli's Equations 556
11.6. Equilibrium of a Free Interface. 557
Contents (Volume II) IX
11.7. Effect of Free Charges at an Interface. 11.8. Electrohydrodynamic Stability. 11.9. Electrohydrodynamic Flow in a Circular Cylindrical Conduit 11.10. Electrogasdynamic Energy Converter.
Problems.
Ferrofluids .
12.1. Scope of the Chapter 12.2. Constitutive Equations of Ferromagnetic Fluids. 12.3. Theory of Ferrofluids
A. Equilibrium Constitutive Equations . B. Nonequilibrium Constitutive Equations C. Balance Laws
12.4. Existence and Stability of a Constant Magnetization in aMoving
558 561 567 569 573
574
Ferrofluid 582 12.5. Ferrohydrodynamic Approximation . 585 12.6. Some General Theorems in Ferrohydrodynamics 587
A. Generalization of the Helmholtz Equation 587 B. Generalization of the Bernoulli Equation. 588
12.7. Ferrohydrostatics 589 A. Equilibrium of a Free Surface . 589 B. Energy Conversion . 590
12.8. Ferrohydrodynamic Flow of Nonviscous Fluids. 591 A. Preliminary Remarks 591 B. Steady Two-Dimensional Source Flow 593
12.9. Simple Shear of a Viscous Ferrofluid . 596 12.10. Stagnation-Point Flow ofa Viscous Ferrofluid 598 12.11. Interfacial Stability of Ferrofluids 603 12.12. Other Problems in Ferrofluids . 608
Problems. 609
CHAPTER 13
Memory-Dependent Electromagnetic Continua.
13.1. Scope of the Chapter 13.2. Constitutive Equations. 13.3. Thermodynamics of Materials with Continuous Memory 13.4. Quasi-Linear and Linear Theories.
A. Quadratic Memory Dependence B. Finite-Linear Theory C. Linear Theory D. Linear Isotropic Materials . E. General Polynomial Constitutive Equations .
13.5. Rigid Bodies. A. Continuous Memory B. Polynomial Constitutive Equations
611
611 612 613 620 621 622 624 627 629 630 630 631
x Contents (Volume II)
13.6. Dispersion and Absorption. 13.7. A Simple Atomic Model 13.8. Free Motion of an Electron Under Magnetic Field 13.9. Electromagnetic Waves in Memory-Dependent Solids 13.10. Electromagnetic Waves in Isotropic Viscoelastic Materials. 13.11. Nonlinear Atomic Models for Polarization . 13.12. COI}~titutive Equations of Birefringent Viscoelastic Materials
A. Rate-Dependent Materials. B. Linear, Continuous Memory of Strains
13.13. Propagation of Waves in Birefringent Viscoelastic Materials 13.14. Photoviscoelasticity.
Problems.
CHAPTER 14
632 634 637 641 647 652 657 659 660 661 666 673
Nonlocal Electrodynamics of Elastic Solids 675
14.1. Scope of the Chapter 675 14.2. Constitutive Equations. 677 14.3. Thermodynamics 679 14.4. Linear Theory . 682 14.5. Material Symmetry. 686 14.6. Nature of Nonlocal Moduli 688 14.7. Nonlocal Rigid Solids . 693 14.8. Electromagnetic Waves. 694 14.9. Point Charge. 696 14.10. Rigid Magnetic Solids 696 14.11. Superconductivity . 699 14.12. Piezoelectric Waves. 702 14.13. Infrared Dispersion and Lattice Vibrations 704 14.14. Memory-Dependent Nonlocal Electromagnetic Elastic Continua 707 14.15. Linear Nonlocal Theory for Electromagnetic Elastic Solids. 710 14.16. Natural Optical Activity 712 14.17. Anomalous Skin Effects. 713
Problems. 715
CHAPTER 15
15.1. Scope ofthe Chapter 15.2. Space-Time, Notation
A. Space-Time. B. Special Relativity C. General Relativity D. Inertial Frames and Rest Frame E. Proper Time, Timelikeness . F. Space and Time Decomposition G. Antisymmetric Tensors and Axial Four-Vectors.
716
Contents (Volume II) Xl
15.3. Relativistic Kinematics of Continua 725 A. Motion, Strain Tensors. 725 B. Relativistic Rate of Strain . 727 C. Contravariant Convective Time Derivative 728
15.4. Covariant Formulation of Maxwell's Equations in Matter 729 A. Electromagnetic Fields . 729 B. Integral Formulation of Maxwell's Equations 731 C. Four-Vector Formulation of Maxwell's Equations 733
15.5. Relativistically Invariant Balance Laws 734 15.6. Electromagnetic Interactions with Matter 738 15.7. Thermoelastic Electromagnetic Insulators 741 15.8. Electromagnetic Fluids. 743
A. General Nondissipative Case . . 743 B. Linear Electromagnetic Constitutive Equations 744 C. Elementary Dissipative Processes . 745 D. Relativistic Perfect Magnetohydrodynamics . 746
15.9. Further Problems in the Relativistic Electrodynamics of Continua. 747 Problems. 748
References
Index
753
II
CHAPTER 2
CHAPTER 5 Constitutive Equations
9.0. An Overview of Basic Equations
Basic equations of electrodynamics of continuous media were developed in Chapters 3 and 5. Here we give a summary of these equations, with a supple mentary discussion regarding their extensions to some more complex media, which will be elaborated in this volume.
Macroscopic electromagnetic theory is based on two sets of equations:
(I) Balance Laws: These consist of Maxwell's equations and mechanical balance laws. These equations are valid irrespective of material con stitution.
(II) Constitutive Equations: These equations characterize the nature of the material media. They express the response of the medium to external stimuli. Consequently, they have different forms depending on the nature and constitution ofthe bodies. Elastic solids, viscous fluids, ferromagnetic materials, memory-dependent electromagnetic elastic solids, and electro magnetic fluids all have different constitutive equations.
For simple materials balance laws are the same, irrespective of the material constitution, but, constitutive equations change from one type of material body to the next. As discussed in Chapter 5, electromagnetic elastic solids have different constitutive equations from those of electromagnetic fluids. However, for some complex media, e.g., ferromagnetic solids, additional internal degrees of freedom are brought into play. In such cases both balance laws and constitutive equations will have to be supplemented by additional equations. An example of such media is the subject of the present chapter. Ferrofluids, discussed in Chapter 12, is another example of such complex media, where the new degree offreedom arising from the spin-lattice interaction is brought into play. Among many other important fields requiring the considera tion of internal degrees of freedom, we mention briefly ferroelectric media, semi-conductors, liquid crystals (DeGennes [1974], Eringen [1979a, b]), and magnon-phonon interactions (Matthews and Lecraw [1962]).
Here we give a summary of basic equations for simple media as discussed
438 9. Elastic Ferromagnets
in Chapters 3 and 5. Ferromagnetic media and ferrofluids are discussed in Chapters 9 and 12, respectively. Chapters 13 and 14 take up memory effects and nonlocality. In Chapter 13 the effects of past deformations and electro magnetic fields are brought into play, and in Chapter 14 those occurring at points distant from the reference point are introduced. In all these theories the balance laws, given below, remain valid, possibly with supplementary terms and/or equations.
I. Balance Laws
Balance laws are the local field equations consisting of Maxwell's equations and the mechanical balance equations. These are valid in the body, with volume 1/, excluding the discontinuity surface (J, which may be sweeping the body with its own velocity v. On the discontinuity surface, we have the jump conditions which provide the boundary condition on the surface a1/ of the body, when (J coincides with a"r.
A. Maxwell's Equations (in 1/ - (J)
V·O - qe = 0,
1 aB VxE+--=O
1 ao 1 v x H---=-J c at c'
aa~e + v . J = 0.
B. Mechanical Balance Equations (in 1/ - (J)
Po = plII~j2 or p + pV·v = 0,
(9.0.1)
(9.0.2)
(9.0.3)
(9.0.4)
(9.0.5)
(9.0.6)
(9.0.7)
t[kll = t&'[kPll + B[kAIl' (9.0.8)
p(1' + e1] + ery) + tklVl.k - V· q - ph + PkJk + AJ3k - ~kt&'k = 0, (9.0.9)
py == pry - V· (q/e) - (ph/e) ?: 0.
Accompanying these equations, we have the jump conditions.
C. Jump Conditions (on (J) 0·[0] = We'
n x [ E + ~ V X B ] = 0,
o· [B] = 0,
nX[H-~vXDJ=O, (9.0.14)
n'[J - qev] = 0, (9.0.15)
where surface polarization and surface currents have been discarded. In this regard, see Chapter 3.
[p(v - v)]n = 0,
[(p('I' + el1) + ~. P + 1PV2 + 1(E2 + B2)} (Vk - vd
(9.0.16)
(9.0.17)
[PI1(V - v) -~qln ~ O. (9.0.19)
There is no jump condition corresponding to (9.0.8).
E. Mechanical Surface Traction (on a1/') In the absence of the moving discontinuity surface, the mechanical surface
traction is given by (9.0.20)
F. Definitions of Electromagnetic Field and Loads The electromagnetic fields in the fixed laboratory frame RG are denoted by
D, E, B, H, P, M. In the frame Rc, co-moving with the reference point, they are denoted by script majuscule letters,~,~, PlJ, Yt', fYJ, and At. Cauchy's stress tensor is denoted by tk/ and the electromagnetic stress tensor by tf,. A part of tkl is the symmetric stress tensor Etkl' The electromagnetic body force is given by FE, the electromagnetic momentum by G, and the Poynting vector by 9':
1 ~ = E + -v x B,
c
c
c
'I' = e - el1 = 6 - el1 - p-l~kPk'
t~l = Pk~l - BkAl + EkEl + BkBl - 1(E2 + B2 - 2.${· B)(jkl'
440 9. Elastic Ferromagnets
II. Constitutive Equations
Constitutive equations were discussed thoroughly in Chapter 5. According to the axioms of constitutive theory, the fields are divided into two distinct classes:
(a) the dependent variables; (b) the independent variables.
The dependent variables are considered to be functionals of the indepen dent variables.
The dependent variables, at a reference point X, at time t, are:
'P = free energy,
q = heat vector,
P = polarization vector,
The independent variables are:
8 = electric field vector,
They are given at all points X' of the body, at all past times, including the present time, -00 < t ' ::;; t.
<W'(X/, t'} = {e, ve, C, 8, B}, X' E V, 00 < t ' ::;; t. (9.0.23)
For more complex media, such as ferromagnetic elastic solids and viscous fluids, other additional variables are brought into play, as discussed in this chapter and in Chapter 12.
1. Nonlocal Media
The general theory of constitutive equations for memory-dependent nonlocal media begins with the formal constitutive equation
~(X, t) = ~[<W'(X/, t')J, (9.0.24)
where ~ is a functional of <W'(X/, t'} over space and tjme. This is the basis of the nonlocal elasticity discussed in Chapter 14.
9.0. An Overview of Basic Equations 441
2. Memory-Dependent Local Media
For the local theory, only the values of the fields <??I(X', t') at the reference point X are considered. Thus, 1Z is a functional of only the time histories <??I(t') at the reference point X
1Z(X, t) = ff[<??I(t')], -00 < t' :::;; t. (9.0.25)
For simple memory-dependent materials, this covers all sorts of viscoelastic solids and fluids presented in Chapter 13.
3. Electromagnetic Elastic Solids (Section 5.8)
For local elastic solids, nonlocality and memory effects are discarded. In ,this case then, 1Z is a function of <??I at (X, t).
1Z = F(<??I). (9.0.26)
4. Electromagnetic Viscous Fluids
For fluids, C, in (9.0.23), is replaced by the mass density p and a new variable dkl is included (Section 5.12), e.g.,
(9.0.27)
Similar equations are written for 1], Pk, Jltk, tkl , qk' and Jk' Constitutive equations are subject to various invariance requirements as
elaborated in Chapter 5. Among these, the restrictions arising from the second law of thermodynamics (9.0.10) are prominent. These restrictions are explored separately in each of the following chapters, except Chapter 10, on electro magnetic fluids which was discussed in Volume 1, Section 5.12. In order to make Volume 2 self-contained we present here a brief discussion.
Constitutive equations for electromagnetic viscous fluids begin with (9.0.27). Similar equations, involving the same set of independent variables, are assumed to be valid for 1], q, t, P, Jt, and J.
Eliminating ph/() between (9.0.9) and (9.0.10) we obtain
., 1 . . py == -p('¥ + 1]() + tk1vl,k + eqk8,k - PeCk - JltkBk + ASk ~ O. (9.0.28)
Substituting 'i' from (9.0.27) into this inequality we have
where we used (9.0.6) to replace p and iI)troduced the spin tensor Wkl =
V[k,lj' This inequality is linear in 0, Wkl , dkl , li.k' $k' and 13k, The necessary and
442 9. Elastic Ferromagnets
sufficient conditions, for (9.0.29) to remain in one sign, are
and
o\{l of) = 0,
t[klJ = 0,
(9.0.30)
(9.0.31)
where Dt is the dissipative stress tensor and 11: is the thermodynamic pressure, defined by
o\{l 11:= -Op-l. (9.0.32)
From the first three equations of (9.0.30), it is clear that \{I is independent of d and Vf) and the stress tensor is symmetric. Thus,
P[krffl] + vIt[kBl] = O. (9.0.33)
If Dt, q, and ,$ are continuous in d, Vf), and iff, from (9.0.31) it follows that
Dt = 0, q = 0, ,$ = 0, when d = 0, Vf) = 0, iff = O. (9.0.34)
Thus, we have proved the following theorem (Eringen [1980, Sect. 10.24]):
Theorem. The constitutive equations of electromagnetic fluids do not violate the second law of thermodynamics, if they are of the form (9.0.30) subject to (9.0.31)-(9.0.34).
Equation (9.0.33) implies that, in fluids the electromagnetic couple vanishes. Since the free energy function \{I must be an objective scalar function of iff
and B, it can depend on these variables only through their invariants.
(9.0.35)
where 13 is selected so as to satisfy the invariance under the time-reversal. Hence
\{I = \{I(1 1, 12, 13, f), p-l),
o\{l rJ = -ai)'
3 (g'B)B ,
At= -2P[:~ B + :~ (g. B)g J (9.0.36)
Constitutive equations for ot, q, and f can be constructed by using Table E2 (Vol. I) to obtain the generators of these quantities as functions of the joint invariants of d, ve, g, and B. Below we give the linear theory.
Linear Constitution Equations
The free energy for the linear theory is a quadratic isotropic function, but P, At, ot, q, and f are linear in independent variables. Hence
1 1 'P='P _-XEg·g_-XBB·B
o 2p 2p ,
a'Po 1 aXE 1 axB 11 = -Te + 2p ae g · g + 2pae B ' B,
P = xEg,
q = KVe + KEg,
f = (Jg + (Jove,
where the material moduli 'Po, XE, XB ; the viscosities Av, .uv; the heat conduction coefficients K, KE; and the electric conduction coefficients (J and (Jo are func tIOns of p-l and e. Coefficients of KE and (Jo are known as Peltier and Seebeck coefficients.
From the Clausius-Duhem (C-D) inequality (9.0.31), it follows that
K ;:0: 0, (J ;:0: 0, 3Av + 21Lv ;:0: 0, .uv ;:0: o. 4K(Je-1 - (KEe-1 + (J°f ;:0: O.
(9.0.38)
This completes the constitutive theory for the electromagnetic theory of viscous fluids.
9.1. Scope of the Chapter
Chapter 8 was devoted to the magnetoelasticity of solids which present no magnetic ordering (e.g., paramagnetic bodies), or bodies in which this ordering does not manifest itself (e.g., the so-called soft ferromagnetic bodies). Here we examine the case of magnetic solids in which the ordered arrangement of magnetic spins, be it of the ferromagnetic or antiferromagnetic type, has
444 9. Elastic Ferromagnets
important consequences for magnetoelastic couplings. Most of the chapter, however, is devoted to the case of hard ferromagnetic bodies. As was briefly recalled in Section 4.5, the most important coupling phenomenon is the so-called phonon-magnon coupling with the allied magneto acoustic resonance effect. On a microscopic scale, this phenomenon follows from the fact that both phonons and magnons obey the Bose-Einstein statistics in quantum physics, and are therefore expected to interact in a sufficiently strong manner. Here, however, all discrete details are avoided so that, of necessity, a heuristic model of interactions must be considered; this is the object of Section 9.2. The continuum formulation of a theory of elastic ferromagnets, apart from the few new ingredients introduced by the model of interactions, then follows the same development as other continuum theories (see Chapters 3 and 5). Local balance equations are given in Section 9.3, and the constitutive theory for thermoelastic ferromagnetic insulators is developed in Section 9.4. Special attention is given to the cases of quadratic free energy, infinitesimal strains, the correspondence between microscopic and macroscopic representations of exchange forces, cubic and uniaxial crystals, and elementary dissipative processes such as viscosity and spin-lattice relaxation.
Section 9.5 presents a resume of the basic equations. Section 9.6 introduces the reader to the study of coupled magnetoelastic waves in ferromagnetic insulators. The effects of magnetoacoustic resonance, damping of magneto elastic waves, and the magnetoelastic Faraday effect are exhibited analytically and illustrated by many curves. Applications of magnon-phonon couplings are examined in Section 9.7. These include pumping and temporal magnon phonon conversion. Section 9.8 discusses briefly more general problems such as the case of deformable antiferromagnets.
Dynamic magnetoelastic effects in magnetically ordered solid bodies occur in the ultrasonic (hypersound) region, and are particularly important from the viewpoint oftechnological applications which include hypersound generators, high-frequency magnetostrictive transducers, the amplification of waves by using nonlinear interactions, the design of wave filters and delay lines with fixed delay or electronically variable delay, analysis of the internal magnetic field, internal-magnetic field synthesis, etc. A great variety of physical effects, which these materials can be made to exhibit, to greater or lesser degree, has been utilized in the ever-broadening search for new components. The strong links between solid state physics on the one hand, and the electronics industry on the other, have resulted in an area of research scrutinized simultaneously by applied physisists, electrical engineers, and scientists in the field of mechanics.
9.2. Model of Interactions
In previous chapters we have dealt with paramagnetic elastic bodies. Here we focus our interest on the case of ferromagnetic elastic bodies. Since ferro magnetism is, by its very nature, a quantum mechanical effect, and we intend
9.2. Model of Interactions 445
to consider a phenomenological approach dealing with continuous fields, there is a need to introduce a heuristic model of interactions. This model will serve to describe, in the language of continuum physics, the interactions which take place between the lattice continuum, i.e., the usual substrate of elastic defor mations and the magnetization field.!
In the quantum-mechanical sense, individual particles have associated with them a magnetic moment and an internal angular momentum called spin. Electrons are also believed to provide a predominant contribution to the magnetic moment of an atom (see Section 4.4). In continuum theory it is convenient to refer to the continuum, which smoothly represents the discrete distribution of individual spins over the material body, as the "electronic" spin continuum.2 S\nce the field equations governing the lattice continuum-the equations of motion-have already been examined in detail in Chapter 3, the main purpose of this section is to elaborate upon the ingredients which allow the formulation of the field equations that govern the electronic spin continuum.
A. Gyroscopic Nature of the Spin Density
In Section 9.0 it was mentioned that, in ferromagnetic materials, spin-lattice interactions play an important role in this magnetic behavior. The field primarily associated with the electronic spin continuum is the intrinsic spin density per unit mass in the co-moving frame. This is introduced by the isotropic gyromagnetic relationship (compare Section 2.2).
S(x, t) = y-! p(x, t}. (9.2.1)
The isotropy of the effect follows from the fact that only one type of particle, the electron, provides a predominant contribution. Accordingly, the gyro magnetic ratio y is not very different from the constant y. = - e/moc (here only spin angular momentum is accounted for, see (2.2.10», and p and S
depend on the position x at time t in the present configuration .Yt of the material body.
In order to treat phenomenologically the magnon-phonon coupling (thus long-wave magnons) we consider low levels of energy, i.e., low temperatures. Consequently, the present discussion is limited to the case of temperatures B which are much smaller than the Curie temperature Be of the material: B « Be. In these conditions the local magnetization may be considered saturated with a time-independent magnitude. It follows from these assumptions that
p' p = /1; = const. (9.2.2)
1 Such a model has been devised by H.F. Tiersten [1964]. See also Maugin [1976b] for general electromagnetic continua. 2 As usual, not too much attention should be paid to the wording, which only provides a modus vivendi; and it must be noticed that there is not necessarily any one-to-one correspondence between microscopic concepts and macroscopic ones.
446 9. Elastic Ferromagnets
and
But via the equation of motion (2.2.1) we can also write
Ji = Ji(X, t),
XE V,
/1i,K/1i =0.
(9.2.3)
(9.2.4)
(9.2.5)
(9.2.6)
Direct consequences of (9.2.3) are as follows: since I Jil = const., if Dn denotes the co-rotational derivative (see Section 1.12) with respect to a frame rigidly attached to Ji in Rc(x, t), we will have DnJi = ° where, symbolically, Dn = d/dt - n x . Thus it is necessarily of the form
s=flxs.
By taking the vector product of this with Ji we find that
n = /1;2 [Ji X ft + (w n)Ji],
(9.2.7)
(9.2.8)
where n is called the precessional velocity vector of the magnetization density or the spin density. Equation (9.2.7) reminds us of the equation governing a gyroscope in a frame attached to it. Indeed, the gyroscopic character of the spin s is asserted from (9.2.7')2:
n· s = y-1 g. it = 0, (9.2.9)
where s is a couple per unit mass. Equation (9.2.9) states that, in a real precessional velocity field fl, the couple s = y -1 it does not produce any power. Such a couple is said to be a gyroscopic or d'Alembertian inertia couple. Consequently, the inertia associated with the field Ji will not participate in the statement of the first principle of thermodynamics.
B. Spin-Lattice Model of Interactions
For the sake of simplicity we consider nonelectrically polarized ferro magnets. 3 Thus,
P =0, 1t = 0, (9.2.10)
everywhere in the body at any time. Then the usual motion of the deformable body
x = x(X, t) (9.2.11)
and the magnetization function (9.2.5) may be considered as defining a kind
3 However, there is no difficulty in accounting for nonzero P. In this regard, see Tiersten and Tsai [1972J and Collet and Maugin [1974].
9.2. Model of Interactions 447
of generalized motion for the total lattice-plus-spin continuum. With each material point in the body there is associated, in a unique way, a magnetization field or a spin field, so that the electronic spin continuum cannot translate with respect to the lattice continuum at that point. Therefore, it is clear that the spin continuum expands and contracts with the lattice continuum and must occupy the same volume with its volumetric behavior being governed by the usual continuity equation. As usual, the lattice continuum responds to volume and surface forces (thus, to stresses) and to volume couples. We suppose here that it does not possess any mechanism to respond to surface couples.4
Based on this observation, the conservation oflinear momentum states that whatever force of magnetic origin (e.g., the ponderomotive force) is applied to a point on the spin continuum, it is transferred directly to the lattice con tinuum at that point. Indeed, by its very nature, the spin continuum can respond only to couples, which may be either volume or surface couples. In view of (9.2.10) the ponderomotive couple (see (3.5.44)) applied to the spin continuum is reduced to
cE = .H x B = PI1 x B. (9.2.12)
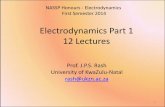
As far as the interactions between the lattice continuum and the spin con tinuum are concerned, they must necessarily be of the couple type (see Figure 9.2.1). We assume that this couple results from the existence ofa local magnetic induction field LB, so that the couple exerted by the lattice continuum on the spin continuum is given by the "recipe" (compare (9.2.12)):
(9.2.13)
Since the angular momentum is conserved between the two continua, an equal and opposite couple
C(S/L) = -e(L/S) = LB x .H= P LB x P (9.2.14)
is exerted on the unit volume of the lattice continuum. Finally, in order to account for ferromagnetic exchange effects, we must
consider that each spin of the electronic spin continuum experiences from its nearest neighbors an action caused by the exchange forces of a quantum mechanical nature (see Section 4.5). Given the rapid fall with distance of this type of force, it will be assumed that they give rise to contact (i.e., surface) actions in much the same manner as the stress vector for the lattice con tinuum. More specifically, a surface exchange contact force !!T is introduced which produces a couple per unit area equal to .H x !!T on the spin con tinuum. After the discussion given in Section 4.5, it is clear that !!T will be related in some way to the spatial nonuniformities in the magnetization field. !!T is an axial vector and has the dimension of a magnetic field times length,
4 This possibility, however, is envisaged in Collet and Maugin [1975] and Collet [1978].
448 9. Elastic Ferromagnets
LATTICE CONTINUUM (LC) (I ne rt i a : p v)
Volume c (SCI LC) couples
Maxwell's SPIN CONTINUUM (SC) equations (Inertia: p)-1 ~)
force f
--..""."", ,....";,,,. B~
Surface coup! ~
Figure 9.2.1. Interactions in deformable ferromagnets (from Maugin [1979c, p. 253]). Reprinted with permission of Elsevier Science Publishers.
or of a surface distribution of magnetic dipoles. Similar to the generalized stress principle (3.8.3), it is assumed that the value of :!I on 0"Y depends only on the normal vector n of the surface, i.e., fT = 5(0) = fT(x, t; n), x E 0"Y. This implies a first-order gradient theory as far as magnetization effects are con cerned. Since :!I acts through the couple oR x fT, only the portion of 5(0) which is orthogonal to oR is effectively defined, so that, without loss of generality, we can set forth the condition
5(o)'oR= 0
on 0"Y. A similar condition may be imposed on LB. That is,
LB'oR= 0 at all points in "Y.
(9.2.15)
(9.2.16)
We are now in a position to set forth the global balance laws that govern non polarized moving ferromagnetic bodies.
9.3. Balance Equations 449
A. Global Balance Equations
Using the notation of Section 3.10, and taking into account the model just constructed, we have the following global balance laws, in addition to Maxwell's equations «9.0.1) (9.0.5)),
Conservation of Mass:
dd f P dv = o. t "Y"-a
Balance of Momentum for the Lattice Continuum:
dd f PVi dv = f (Ph + Fn dv + r t(O)i da t "Y" -a "Y" -a J a"Y"-a
Balance of Moment of Momentum for the Lattice Continuum:
dd f (x x PV)i dv t "Y"-a
Balance of Angular Momentum for the Electronic Spin Continuum:
d f -1 f E f -d PY fl dv = [c + C(L/S)] dv + Pfl X 9(0) da, t "Y" -a "Y" -a a"Y"-a
Conservation of Energy for the Combined Continuum:
dd f p(!v2 + e) dv = f (pf·v + ph + WE) dv t "Y" -a "Y" -a
+ f [w;]np da, a(l)
(9.3.1)
(9.3.2)
(9.3.3)
(9.3.4)
(9.3.5)
As noted in Section 9.0, for the first time, here we encounter a new balance law (9.3.4), in addition to modifications introduced by the spin degrees of freedom, in other balance laws.
450 9. Elastic Ferromagnets
Principle of Entropy
dd Ie PY/dv~I p~edv+ r. e-1q·nda. t ,t -(1 "//_(1 JaY'-(1
(9.3.6)
All symbols bear the same significance as in Chapter 3. 5(0) is the only new field which contributes to the expression of the first principle of thermo dynamics, since the inertia associated with J! yields a zero contribution (see (9.2.9)) and LB cannot contribute because of the action-reaction principle between the two continua. The power developed by 5(0) is estimated in accordance with the rule that a magnetic field A, acting on a magnetization field At = PJ!, produces a power pA . Ji. As before O'(t) is a moving discontinuity surface having velocity v with respect to the laboratory frame RG •
B. Local Balance Equations
The localization of equations (9.3.1)-(9.3.3) is made, as modeled by (3.10.3):
Conservation of Mass: jJ + pVk,k = 0 in "r - 0',
[P(Vi - v;)]ni = 0 on O'(t),
Balance of Momentum for the Lattice Continuum:
PVi = pj; + N + tji,j in "f/' - 0',
[pvi(vj - Vj) - tji - (t}f + vpJ]nj = 0 on O'(t),
with t(D)i = njtji on o"f/' - 0';
Balance of Moment of Momentum for the Lattice Continuum:
eijk(tjk + P LBj!1k) = 0 in "f/' - 0'.
Applying the alternation symbol to the free index this reads
tUiJ = - P LB[j!1iJ in "f/' - 0'.
(9.3.7)
(9.3.8)
(9.3.9)
(9.3.10)
(9.3.11)
(9.3.12)
(9.3.13)
Applying the tetrahedron argument (3.8.4) to (9.3.4) we can show that
(9.3.14)
where £!lJj; is a new (general second-order) tensor which plays a role similar to the stress tensor tji . Since 5(0) is supposed to represent the effects of exchange forces, we shall refer to flj]j; as the spin-spin interaction or exchange-force tensor. Taking into account (9.3.14), the localization of equation (9.3.4) yields at once the following results:
Balance of Angular Momentum for the Electronic Spin Continuum:
y-lp; = e;jk!1j(Bk + LBk + P-1£!lJzk,Z) + p-1e;jk£!lJzk!1j,Z in"f/' - 0', (9.3.15)
[py-l !1;(vj - v) - e;pQ!1pflj]jQ]nj = 0 on O'(t). (9.3.16)
9.3. Balance Equations 451
If we note that p. is ofthe form (9.2.7), and compare it with (9.3.15), we deduce
p. = n x J.1 in "Y - (J, (9.3.17)
where now n = _yBeff (9.3. IS)
with (9.3.19)
and or (9.3.20)
The latter is a direct consequence of the conditions oflow temperature (J « (Jc
and saturation of the magnetization. Equations (9.3.18) and (9.3.17) reminds us ofthe Larmor spin precession of an isolated electron (om/ot = -YeB x m). However, the precession ofJ.1 here is caused by an effective induction Beff which results from the combined action of the Maxwellian magnetic induction, the local magnetic induction, and the exchange forces via (fiji'
Conservation of Energy: Employing the equations obtained above and (3.10.3), the localization of
(9.3.5) yields - p(q; + (J1j + (11) + tjiVi,j + (fIji(iti),j - P LB' P.
+ V·q + f·1t + ph = 0 in"Y - (J (9.3.21)
and
[{!pv2 + p'li + P11(J + !(E2 + B2 - 2Jt· B)}{vj - v)
- (tji + tIf + VjGi)Vi - (fIjiiti - (qj - Yj)]nj = 0 on (J(t), (9.3.22)
where 'Ii = e - 11(J = /:: - B· J.1 - 11(J. (9.3.23)
According to the Legendre transformation (9.3.21h, e and 'Ii depend func tionally on the magnetization density. Consequently, by using (9.2.9), (9.3.1S), and (9.3.19), we have
(fIji,j{t; = - pB' P. - p LB· p.. Finally, we have from (9.3.6) the
Local Entropy Inequality:
p1j ~ (J-l ph + (J-l V . q + q' V G) in "Y - (J,
(9.3.24)
(9.3.25)
Together with Maxwell's equations, eqs. (9.3.7), (9.3.S), (9.3.9)-(9.3.11), (9.3.13), (9.3.14), (9.3.16), (9.3.17), (9.3.22), (9.3.24), and (9.3.25) form the complete set of local field equations, boundary conditions, jump conditions, and thermo dynamic constraints for the present theory. To close the theory, these must be supplemented with initial conditions and constitutive equations for the
452 9. Elastic Ferromagnets
dependent variables e, 1], t ji , LB, !?4ji , $, and q. The Clausius-Duhem (C-D) inequality is central to the development of the constitutive theory. Note finally, that the above-obtained equations are independent of the exact mechanical behavior which may be that of elastic bodies, fluids, or media with an inter mediary behavior.
C. The Clausius-Duhem (C-D) Inequality
Eliminating h between (9.3.21) and (9.3.25), we are led to the following Clausius-Duhem inequality:
~ . 1 - p('¥ + 1]8) + tjiVi•j - P LB' Ii + [!8ji(itJ,j + $ . iff + (j q . V8 ~ O. (9.3.27)
It is important to express this inequality in terms of objective time rates. To fulfill this requirement, we note that 11 is objective since it is the magnetization in the co-moving frame and we introduce the objective time rates
mi == iti - V[i.jJi1j = (DJIl)i'
@ij == (itJ. j - V[i.k]i1k,j = (DJ VIl)ij + i1i,k d kj'
(9.3.28)
(9.3.29)
where (VIl)ij = i1i,j and D J indicate the Jaumann derivative. The second part of (9.3.29) is readily checked from (1.12.6) and (1.9.7). Then, using (9.3.28), (9.3.29), (9.3.13), and (9.3.20), (9.3.27) takes the form 5
- p(4 + 1]0) + (Jjidij - P LB' ill + !?4ji@ij + $ . iff + 8-1 q . VB ~ 0, (9.3.30)
so that (9.3.31)
(9.3.32)
The last equation is none other than the canonical decomposition of the Cauchy stress in its symmetric and skew-symmetric parts. This decomposition is fundamental in that it shows that if the field LB possesses a thermo dynamically irreversible contribution (which will be shown to represent the so-called spin-lattice relaxation phenomenon), then this contribution partici pates in the Cauchy stress. As a consequence, it will follow that the damping of elastic waves can be partly due to spin-lattice relaxation.
Another comment is in order concerning (9.3.30) and the duality inherent in thermodynamics. If the field 11 is frozen in the deformable matter (i.e., if its precessional velocity n equals the vorticity w), then LB no longer contributes to (9.3.30). This fact upholds the interpretation already granted to LB. How ever, !?4ji is clearly associated with the gradient of 11.
5 The inequality (9.3.30) was first obtained by Maugin and Eringen [1972aJ and Maugin [1974aJ for insulators. Its extension to the case of electrically polarized conductors is due to Maugin and Collet [1974].
9.4. Constitutive Theory 453
D. Boundary Conditions
If (T is a material surface, v = v, then (9.3.10), (9.3.16), (9.3.22), and (9.3.26) reduce to
[tji + tj~ + vjG;]nj = 0,
[eipqJ.lpgHjq]nj = 0,
[0-1 qj] nj ::; O.
(9.3.33)
Letting (T coincide with o"f/ then reproduces the boundary conditions on o"f/. Now consider (9.3.14). Jt x 9(0) is a surface couple acting on the electronic
spin continuum. If angular momentum is conserved for the whole continuum on o"f/ - (T, then a surface couple 9(0) x Jt should be applied to the lattice continuum. But the latter is not supposed to be able to respond to such couples. Therefore, in general, for any J1 different from zero, we must have
9(0) = 0 on o"f/ - (T. (9.3.34)
If follows from (9.3.14) and (9.3.34) that the vectors of components J.li and nj86ji must be parallel on o"f/ - (T. Introducing a multiplier A. (an unknown to be found in the process of problem solving), the spin boundary condition takes the restricted form6
(9.3.35)
A. Saturated Ferromagnetic Elastic Insulators
Numerous ferromagnetic materials can be considered to be insulators. Here we consider the case of elastic ferromagnetic insulators that are magnetically saturated. Therefore, in addition to (9.2.10), we set
,$ =0.
FE = (VB)·M.
(9.4.1)
(9.4.2)
6 This boundary condition was established by one of the authors in the more general ferri~agnetic case (Maugin [1976c]). In cubic crystals where Blj; = all;,}, (9.3.35) takes the form e(8,,/8n) + " = 0 with 0 ~ e = a/).. ~ 00. This is the boundary condition obtained by Soohoo [1963] (see also Gurevich [1973, p. 140]). In rigid bodies only conditions of the type (9.3.35) can be imposed with, for instance, ).. = 0 -+ njBlj; = 0 or ).. = 00 -+ " = O. In deformable bodies Collet and Maugin [1975] have considered a finer mechanical description to obtain a broader class than (9.3.35) for the spin boundary conditions. Hyperstresses and double normal forces must be considered there along with the usual stresses.
454 9. Elastic Ferromagnets
Fundamental to the development of the constitutive equations is the second law of thermodynamics (9.3.27) which reads
- p(qJ + ;,8) + tjiVi,j - P LB' it + ~ji(itJj + 8-1 q . V8 2: O. (9.4.3)
In accordance with the axioms of constitutive theory enunciated in Chapter 5, we assume that the dependent constitutive variables
are functions of the set of independent variables
{Xi,K' l1i, l1i,K, 8,K' 8}.
(9.4.4)
(9.4.5)
More convenient is a set of equivalent objective variables that can be con structed from (9.4.5), namely,
(9.4.6)
However, for magnetically saturated insulators, a more useful set is
(9.4.7)
where 8,K = 8,iX i,K,
(9.4.8) .ffKL = l1i,Kl1i,L = .ffLK ·
This contains three members less than those contained in (9.4.6), since the number of independent components of mKL is nine, while that of .ff KL is six. We have four constraints (9.2.2) and (9.2.6) restricting 11 and 11;,K' Therefore, if we use (9.4.7), the three constraints (9.2.6) can be disregarded and we will be left with a single constraint, (9.2.2), or equivalently,
(9.4.9) -1
where C KL is the Piola strain measure defined by (1.4.11). Hence we set -1
qJ = 'P(EK£> mK, .ffKL , 8. K, 8) - gli( CKLmKmL - 11;) (9.4.10)
where gli is the Lagrange multiplier. Employing (1.9.11), we compute the following time rates:
EKL = d· ·x· KX, L lJ l, ).'
rYtK = (itj + l1i Vi,j)xj ,K,
AKL = 2(itJ,jXj ,Kl1i,K'
(9.4.11 )
+ (tii - P :: J.liXj,K) Wij + ~q. V() ~ 0, (9.4.12)
where we used vi,i = dij + wij' We note that th<? coefficient of the Lagrange multiplier & in (9.4.10) does not contribute to 'P. The inequality is linear in the quantities 0, O,K' dij, {Ii' and ({Ii),j which can be varied independently and arbitrarily. Moreover, wij = -Wji' Consequently,
Theorem. Constitutive equations of saturated ferromagnetic elastic insulators are thermodynamically admissible if and only if
8'1' 8'1' 1] = -aij' 8() = 0,
,K
8'1' t·· = p--X· KX, L - P LB.J.l. J' 8EKL " J, J "
0'1' LB.= --X' K
J' 8..HKL J, ','
tUiJ = - P LBuJ.lil'
In view of(9.4.13), 'I' is independent of (),K so that
'P = 'I'(EKL' mK, ..H KL, ().
(9.4.13)
(9.4.14)
(9.4.15)
(9.4.16)
(9.4.17)
(9.4.18)
(9.4.19)
From (9.4.18) and the continuity of q with respect to V() it follows that
q = 0 when V() = O. (9.4.20)
The constitutive equation for q is of the form
(9.4.21)
subject to (9.4.18) and (9.4.20). For. some purposes it is useful to express the stress tensor in the forms
of which the second follows from the definition (9.3.31) and
0'1' Etji = P OEKL Xj,LXi,K = Etij (9.4.23)
456 9. Elastic Ferromagnets
is the elastic part of the stress tensor. Note, however, that Et not only contains elastic effects, but also effects such as magneto stricti on, piezomagnetism, and exchange-strictive effects.
We also note that the saturation condition (9.3.20) is satisfied automati cally, since from the symmetry of A KL and (9.4.16) it follows that
o\{l BUk[iflJl.k = 2p~ fl[i.KflJl.L == O.
U~tKL (9.4.24)
Finally, since mK essentially represents the components of the magnetiza tion in the initial configuration, the local magnetic field LB is the field which accounts for the dependence of the energy of the ferromagnet upon the direction of the magnetization. In accordance with the discussion presented in Section 4.5, LB can also be referred to as the magnetic anisotropy field or magnetocrystalline magnetic field.
The free energy function \{I is further restricted by the material and mag netic symmetry regulations. To this end, we employ representation theorems as discussed in Appendix C (Vol. I). However, to exhibit various physical phenomena, we resort to a quadratic expansion of the free energy which is valid for the low-energy levels. 7
B. Free Energy
Let To > 0 be the uniform temperature field and Po the mass density in the reference configuration
(9.4.25)
A polynomial approximation for the free energy, irrespective of any material symmetry, is of the form
Po q.; = LEI + LEx + La + Lpyro + LPiezo + LMs + L ES + higher-order terms, (9.4.26)
where
LEI = 0'0 - Porto T - (Po'Y/2To)T2 + (AKL - BKL T)EKL + ~LKLMNEKLEMN (Thermoelastic energy),
LEx = !aKLAKL + !AKLMNAKLAMN + fKLMmKALM (Exchange energy),
(Magneto-crystalline energy), (9.4.27)
(Pyromagnetic energy),
(Piezomagnetic energy),
7 Reduced forms of constitutive equations for hemitropy were given by Maugin and Eringen [1972b] and Maugin [1976a].
9.4. Constitutive Theory 457
I:MS = !AKLMNEKLmMmN (Magneto-Strictive energy),
I:ES = 'YKLMNEKLJ( MN (Exchange-Strictive energy).
The symmetry regulations of various tensorial moduli (which depend on To and Po) are deduced easily from the symmetry of E KL , J(KL' and the expressions in (9.4.27). (10 is a constant which can be discarded without loss of generality.
Several special cases are of importance:
(a) For centrosymmetric materials there exist no material tensors of odd rank, so that fKLM' NK , and EKLM are nil. Discarding the effect represented by NKL which is of second order in J1.i,K-see (9.4.8)-we see that the phenomena of pyromagnetism and piezomagnetism do not show up In centro symmetric materials.
(b) If we consider isothermal processes, aT/at = 0 and VT = 0, then all terms containing T in factor can be discarded.
(c) The term linear in EKL in the thermoelastic energy can be shown to yield, in the linearized theory, a homogeneous state of stresses (see Section 5.11), which can be formally removed from the formulation by considering that it defines a new reference configuration.
(d) The term AKLMNJ( KLJ( MN is of fourth order in J1.i,K and can be neglected, compared with the term aKLJ( KL, in most cases where the spatial non uniformities in the spin field are small.
Thus, for a noncentrosymmetric material in isothermal situations and in the absence of homogeneous stresses, we can consider the following simplified expression for the free energy:
Po 'I' = !I:KLMNEKLEMN + !AKLMNEKLmMmN
+ EKLMmKELM + h~LmKmL + !aKLJ( KL + 'YKLMNEKLJ( MN' (9.4.28)
This expression still contains contributions of elastic, magnetostrictive, piezo magnetic, magnetocrystalline, exchange, and exchange-strictive origins. We have gathered the last two contributions into a single expression for the following reason: these effects arise simultaneously when we approximate (by a continuous expression) the microscopic exchange energy in solid materials subject to large elastic deformations.
(e) As far as magnetomechanical effects are concerned, magnetostriction is of second order in p (or mK ), whereas piezomagnetism is of first order. For sufficiently small p, the first effect may be neglected compared with the second. The remaining piezomagnetic effect is sufficient to produce the coupling of phonons and magnons (see Section 9.6). Similarly, the exchange-strictive effect is of second order in J1.i,j and can be neglected for small spatial nonuniformities of p. In these conditions (9.4.28) reduces to
458 9. Elastic Ferromagnets
the simple expression
Po'¥ = 1L.KLMNEKLEMN + h~LmKmL + 1 a KL A KL + EKLMmKELM' (9.4.29)
This expression may be thought of as an expansion in E KL and jl KL followed by an expansion of the tensorial coefficients in terms ofmK • Finally, only terms of second order at most are kept, so that along with the magnetocrystalline term only the piezomagnetic term appears as a new term during the process. Constitutive equations (9.4.14)-(9.4.16) read
(9.4.31)
(9.4.32)
C. Correspondence Between the Microscopic Model and the Continuous RepresentationS
Here we consider elastic ferromagnets subject to large deformations, and try to find an expression for the exchange energy in terms of its microscopic representation given in Chapter 4. To that end, consider Heisenberg's expres sion (4.5.7). The exchange integral J is a function of the distance r(ap) between the atoms IY. and [3. Now assume that the angle cpaP between sa and sP is very small, so that, with ISal = ISPI == s,
where n" is the unit vector along S", i.e., along the associated magnetic moment. Then (4.5.7) yields
(9.4.34)
Suppose that, at fixed time, n" can be represented by a continuous function n(X) of the position in the reference configuration K, i.e., in the undeformed lattice. Then, to a sufficient approximation,
nP - n" = n,K(XK - Xa
where XK are the coordinates of the atom IY. in K. Equivalently, using the director cosines d", we can write
(9.4.35)
9.4. Constitutive Theory 459
For the sake of simplicity consider the origin of coordinates at the undeformed site IX. Then XK = O. Substituting from (9.4.35) into (9.4.34) we obtain
(9.4.36)
We then sum this expression over nearest neighbors /3, multiply the whole expression by ! to avoid counting each term twice, and multiply by the number of atoms no per unit of undeformal volume. The first contribution in (9.4.36) can only depend on d and EKL through J(r(aP»). Therefore it can be absorbed in other contributions to the whole free energy that also contain E KL and d. Hence, the contribution of microscopic exchange forces to the phenomenological (free) exchange energy in the undeformed state is obtained by summing only over the second contribution of (9.4.36). That is,
pot/lex = ! noS2 L J(r(aP»)x~Xfdi,Kdi,L' (9.4.37) P
The estimation of this expression is as follows: Let R be the distance between an atom and its nearest neighbors in the configuration K. Since Rand r(ap) are obviously very small on the continuum scale, to a sufficient approximation we can write [see (1.4.2hJ
r(aP)2 = x\aP)x\aP) = cKLx~xf
= R2 + 2EKLX~xf, (9.4.38)
since R = «(jKLX~Xf)1/2. Set rl == XVR, the director cosines of the line that join the sites IX and /3 in K, then (9.4.38) reads
r(ap)2 = R2(1 + 2EKLrlrf),
so that, to the first order in EKL, we have
r(ap) = R(1 + EKLrlrf). (9.4.39)
J(r(aP») can be evaluated by considering its expansion in function of the small distance variation, i.e.,
J(r(aP») ::::::: J(R) + J'(R)(r(aP) - R),
J(r(aP») = J(R) + J'(R)REKLrlrl. (9.4.40)
aKL == n~ S2 R2 J(R) L rlrl, fl. P
YKLMN == 2no2 S2 R3 J'(R) L rlrlrftrA, fl. P
(9.4.41)
460 9. Elastic Ferromagnets
Taking into account (9.4.27h, we can rewrite (9.4.37) in the form
porjJex = }aKLAKL + 'YKLMNEKLAMN. (9.4.42)
This is nothing other than the last contribution in (9.4.28). The phenomeno logical tensorial coefficients are related to microscopic parameters through equations (9.4.38). a KL is obviously symmetric, but (9.4.38) tells us that YKLMN
is also a completely symmetric tensor.9 We see that a continuous approxima tion of the Heisenberg exchange energy here yields both pure exchange and exchange-strictive contributions to the whole free energy. Strictly considered as a formula issueing from microscopic considerations, (9.4.42) is valid only at e = O. However, it may be reinterpreted as a formula valid at an arbi trary temperature (of course, such that e « eJ, by assuming that the material coefficients a KL and YKLMN are temperature dependent.
D. Infinitesimal Strains
In the case of infinitesimal strains we no longer need to distinguish between lowercase and capital Latin indices. For instance, considering (1.6.7), (1.6.8), and (9.4.8), and neglecting exchange-strictive effects, we have
~ _ HI 1 - - + 1 M + - + 1 1 - + 1 £.. = Po T = Z(Jijkleijekl zXij Ilillj eijklliejk zAijkleijllkll1 zaijllk,illk,j'
(9.4.43)
This expression is valid for noncentrosymmetric linear elastic bodies, when there are no initial stresses, and for isothermal situations. To the same degree of approximation, the constitutive equations (9.4.14)-(9.4.16) yield, with p ~ Po,
(9.4.44)
(9.4.45)
(9.4.46)
and
9 There are other cases in physics where a microscopic approach yields a stronger symmetry than the corresponding macroscopic one. This results from the fact that certain special forms of interactions and potentials must necessarily be introduced in a microscopic theory to make it tractable (e.g., central forces, two-body interactions). This happens in the determination of elastic moduli from lattice theory where the so-called Cauchy relation results between the elastic moduli of cubic crystals (see Musgrave [1970, p. 234]).
9.4. Constitutive Theory 461
This last expression shows that the magnetocrystalline effect can contribute to the Cauchy stress at the second order in J.1 in the same way as the magneto striction. This follows from the decomposition of (9.4.22). The relative impor tance of the two effects depends on the strength of the fields. 10 In a fully linear theory we keep only the quadratic terms jointly in eij and fli in the expression (9.4.44). This amounts to setting A ijkl = 0.
The coupling between stresses and the magnetic anisotropy field-or lattice and spin continua-subsists only in the form of the piezomagnetic effect. The local balance law of the moment of momentum is no longer satisfied, for tji is now symmetric. The simplified theory obtained is thus similar to Voigt's theory of piezoelectricity discussed in Chapter 7. Finally, by virtue of Euler's identity for quadratic forms, L can be rewritten in the form
(9.4.48)
which proves useful in studying theorems of existence and uniqueness for this simplified theory.
Returning to the more general case (9.4.43) we note that, with the help of representation theorems,11 expressions for the various tensorial material coefficients for many of the crystallographic classes and magnetic groups, referred to in Chapter 5, can be obtained. However, numerous ferromagnetic materials are either centrosymmetric cubic or unixial (i.e., transversely isto ropic). Consequently, we focus our attention on these two classes.
E. Centrosymmetric Cubic Crystals
Iron and nickel, and some of their compounds such as yttrium-iron-garnet (Y.I.G.), are ferromagnetic materials with a cubic structure. Iron garnets are typical elastic ferro magnets of which the general formula is M 3 Fe1S 0 12 ,
where M is a trivalent magnetic ion and Fe appears in its trivalent form Fe3+ . Y.I.G. is the best known iron garnet with the formula Y3 Fes0 12 where the ion y3+ is diamagnetic.
As an example, we consider a cubic crystal of the magnetic class 1Jl31Jl (which belongs to the subgroup m3 ), the generators of which have been given in Appendix B (Vol. I). This material is centrosymmetric. The tensorial coefficients appearing in (9.4.43) have the representations
(Jijkl = C(jijkl + c 12 (jij(jkl + C44 (Oik Oji + 0UOjk)'
eijk = 0, (9.4.49)
A ijkl = AOijkl + A 12 (jij Okl + A44 (Oik Oji + OUOjk),
where the symbol Oijkl has components equal to one when all indices are alike and zero otherwise. The second equation of (9.4.49) tells us that the magnetic
10 See Maugin and Eringen [1972b] and Maugin [1976a, pp. 299-300]. 11 See Sirotin [1960], [1961], Mason [1966], and Appendices Band E (Vol. I).
462 9. Elastic Ferromagnets
anisotropy will not have any effect on the spin precession if it is only of second order in p. Therefore, we must consider the next contribution, which will be of fourth order in p, in the expression (9.4.43). This contribution reads
with bijkl = Mijkl + b12 (c5ijc5kl + c5ik c5jl + c5jkc5i/)'
Setting Kl == -bj2,
(9.4.50)
(9.4.51)
(9.4.52)
introducing the Cartesian system (x, y, z) of coordinates, discarding terms which contain only Jl == Ipl and using (9.4.48), a short computation leads to the following expression for L: '
L = tCll (e~x + e;y + e;z) + c12(exXeyy + eyyeZZ + ezzexx)
+ tC44(e~y + e;z + e;J + taJli,jJli,j
+ (A44 + Aj2)(exxJl~ + eyyJl; + ezzJl;)
+ K 1 (Jl~ Jl; + Jl; Jl; + Jl; Jl~), (9.4.53)
in which there appear seven material constants, Cll' C12 , C44' A, A44' a, and K l' The fact that there are two magnetostriction constants in cubic crystals was recognized by Akulov (1936). For the purpose of illustration, typical values of these constants are given in Table 9.4.1 for y'I.G. It must be remarked that the deviation from elastic isotropy, which may be measured by the parameter
Table 9.4.1. Room temperature constants ofY.I.G. (after Strauss [1968] from different sources).
Constant Symbol Value
C12 10.77 X 1011 dyn x cm-2
C44 7.64 x 1011 dyn x cm-2
Density P 5.17 gr x cm- 3
Gyromagnetic ratio l' 1.76 x 107 (Oersted x secr1
Saturation moment 4nMs = 4npJls 1750 Oersted Reduced exchange
~ == 2aJls 5.2 x 10-9 Oersted x cm2 constant
K' Anisotropy constant -2_1Jl3K -45 Oersted M -2 s 1
s Magnetoelastic AJl; 3.48 x 106 erg x cm- 3
constants 2A44Jl; 6.96 x 106 erg x cm-3
(9.4.54)
9.4. Constitutive Theory 463
is weak, for ~ ~ 0.06 for the values given in Table 9.4.1.12 This means that Y.I.G. is elastically isotropic for all practical purposes. It must be remarked that for certain materials such as iron, it may be necessary to include terms of the sixth order in Ji in the anisotropy energy. The additional term then has the form K zJ1;J1;J1;.
F. Uniaxial Crystals
Uniaxial crystals are crystals, such as hexagonal cobalt, which exhibit a preferred direction in their magnetic properties. The representation of the elastic, piezomagnetic, and magnetostrictive energies corresponding to this symmetry are to be found elsewhere. 13 If di is a unit vector pointing in the preferred direction, we only recall that, due to the symmetry of eijk in its indices j and k, the piezomagnetic tensor has the following useful representation for uniaxial symmetry:
(9.4.55)
where e1 , ez, and e3 are piezomagnetic constants. This follows directly from the application of a single representation theorem (already used in Chapter 4) to describe optically uniaxial crystals. Similarly, the tensorial coefficients bij and aij of (9.4.55) admit the representations
bij = XMbij - X~didj'
aij = abij + aZdidj , (9.4.56)
where XM and X~ are magnetic anisotropy constants and a and a2 are exchange constants (dependent on () for nonisothermal regimes). Discarding contri butions which contain only IJiI, the expressions (9.4.56) yield the contributions
La = -h~(Ji' d)2, (9.4.57)
and
1 1 (aJi)2 Lex = zaJi.i· Ji,i + za2 ad ' (9.4,58)
where a/ad == d· V in (9.4.58). Upon examining the expression (9.4.57) we see that, if x~ < 0, L2 reaches
its minimum when Ji and d are orthogonal. For instance, if d is along the x3-axis, at equilibrium Jilies in the (Xl' x2 )-plane. If X~ > 0, then La reaches its minimum when Ji and d are aligned. Crystals in which X~ < 0 are called crystals of the easy-plane type. Crystals in which X~ > 0 are called crystals of the easy-axis type. In hexagonal cobalt (in which the preferred direction d is the hexagonal axis), X~ > 0 below approximately 200 DC and X~ < 0 above
12 Clark and Strakna [1960]. 13 For example, in Maugin and Eringen [1972b, Sect. 9].
464 9. Elastic Ferromagnets
that temperature. At room temperature X"tjp5 ~ 4.1. However, it must be noted that the series expansion of ~a in p converges slowly and that in many cases terms of high order (such as the fourth order) must also be included. In fact, since (p' d)2 = p2 - (p X d)2 and terms in p2 can be discarded, (9.4.57) can be rewritten as ~a = K' sin2 <p, where <p denotes the angle between p and d and K' = xrp2j2. An expansion, up to fourth-order terms in p, yields
~a = K~ sin2 <p + K~ sin4 <po (9.4.59)
In hexagonal cobalt at room temperature, K'l = 4.1 X 106 erg x cm - 3 and K~ = 1.0 X 106 erg x cm-3•
As for the expression (9.4.58), the deviation from isotropy or cubic sym metry is usually weak and the second contribution involving a2 may ,often be discarded.
G. Elementary Dissipative Processes
An inspection of the C-D inequality (9.3.30), and the duality inherent in continuum theromodynamics, indicates that in a sufficiently general case we may have thermodynamically irreversible processes associated with uji
(viscosity), LB (dissipative contribution to the anisotropy field due to the fact that p is not frozen in the material; lit =F 0), flJj ! (dissipative contribution associated with spin-spin interactions according to the significance granted to flJji ), f (electrical conduction), and q (heat conduction). We shall examine only linear irreversible processes and, in fact, discard the last two effects as well as the dissipative part for flJji for which the evidence is weak. We index the thermodynamically recoverable parts introduced previously by a left superscript R, and the new irreversible contributions by a left superscript D. In particular,
(9.4.60)
(9.4.61)
By virtue of (9.3.32), and considering the elastic case for the parts indexed R,
tji = Rtji + Dtji ,
The D parts satisfy the remaining dissipation inequality (for non-heat conducting insulators)
py == DUji dij - p rB·1it ~ 0 (9.4.65)
if the R parts have been derived from the potential 'P. For the linear anisotropic insulators, constitutive equations for DO" and rB read
DUji = '1jikl d kl + '1jik 1Ylk'
'iBi = Lijkdjk + Lij1Ylj'
9.4. Constitutive Theory 465
subject to the restrictions of the entropy inequality (9.4.65). In the case of isotropic insulators Da and ~B are uncoupled
DUji = Avdkkbji + 2Jlvdji>
?Bi = - prrYti'
where viscosities Av, Jlv, and the relaxation constant r are subject to
Jlv ~ 0, r ~O.
Introducing the relaxation term R and the viscous force FV by
R = yp x ~B = -pyrp x rit,
FV = div Da,
and noting that
we can rewrite the Euler-Cauchy equation (9.3.9) and the spin-precession equation (9.3.17) in the form
where
Ii = yp x RHeff + R,
RHeff_H +RB + -1"" i - i LiP ~ji,j'
(9.4.73)
(9.4.74)
(9.4.75)
H replaces B in the last expression without loss of generality and, con sequently, the resulting combined field is renamed the effective magnetic field. The relaxation R, which results from spin-lattice interactions according to the significance granted to LB, is shown to participate in the Euler-Cauchy equations of motion.
Note that no hypothesis has been made concerning the magnitude of r. The expression (9.4.69), which serves to describe the relaxation of the spin density toward its equilibrium position (see Figure 9.4.1), and the subsequent equation (9.4.74) are valid for relatively strong damping of the spin precession. However, if r is small and considered as an infinitesimally small quantity of the first order, then the term R in (9.4.74) may be considered as a perturbation. Then Ii can be evaluated from the spin equation (9.4.74) in the absence of R. Carrying out this perturbation procedure yields, in lieu of (9.4.74),
(9.4.76)
where
it = __ 1 p x [p x (RHeff + ~)J. 2r'p2 y
(9.4.77)
Here we took into account the definition of rit, and introduced the vorticity vector wand the new relaxation time
(9.4.78)
Figure 9.4.1. Relaxation ofthe magnetic spin.
To the same degree of approximation, R can be replaced by R in (9.4.73). It must be understood that (9.4.76) and the corresponding Euler-Cauchy equa tion must be used only for sufficiently large relaxation times 1:'. Thus, only for slight deviations from the adiabatic processes, R is the objective relaxation term which generalizes, to the case of deformable bodies, the term deduced from a Rayleigh dissipation function (by Gilbert [1955J) for rigid bodies. R is the relaxation term which generalizes to deformable bodies, the term intro duced heuristically in rigid bodies by Landau and Liftshitz in their pioneering work [1935].14
H. Small Fields Superposed on a Constant Bias Magnetic Field
In many applications, materials are acted upon by a constant magnetic field Ho and magnetization Po- The solid is then subjected to nonuniform small displacement u and fields ji. In this case, constitutive equations can be
14 In rigid bodies the experimental evidence for a Landau-Lifshitz damping of the spin was given by Robdell [1964]. The superiority of Gilbert's term for strong damping is'shown in Kambersky and Patton [1975] (see also Anderson [1968, p. 180]). Akhiezer et al. [1968] deduced (9.4.77) on an unsound thermodynamical basis. The present thermodynamical derivation of both (9.4.71) and (9.4.77), and the establishment of the restricted conditions involving (9.4.77), are due to Maugin [1975]. Previous attempts along the same lines in elastic ferromagnets are due to Alblas [1968] and Maugin [1972a]. The antiferromagnetic and ferrimagnetic cases are established in Maugin [1976c]. Numerical values of 1: can be found in Gilbert [1956].
9.4. Constitutive Theory 467
H = Ho + h,
fl = flo + p,
(9.4.79)
and dropping products of h, p, 15, eij' and their rates and gradients. The underlying assumption is that
Ihl« IHol,
Ipi « Iflol.
to replace flo.
(9.4.80)
(9.4.81)
The linearization is to be performed on the initial state (Po, flo, Ho) where the body carries no initial stress or internal field LBi • Consequently, from the expression of m K , we drop a constant term m~ = J1.0 dj <>jK which causes stress at the initial state. With this, the linearization gives
m K ~ mAk = (lii + J1.0 d i Ui)<>jK,
vi{ KL = iii,kiii,l<>kK<>'L'
~tji = UijklUk,1 + ekijiik + ekijJ1.od p u p ,k,
~Bi = - POl [ei/mU"m + x~'(lii + J1.0d kUk)J,
!!4ji = ajliii,I'
~ = Po'P = tUijkleijekl + tAijkleijmkm, + eijkmiejk + tx~mimj + taijvl{ij + Yijkleijvl{kl,
where the spatial moduli Uijkl, ••• , Yijkl are related to their material counter parts, expressed in the material frame X K by
(Uijkl, Aijkl, Yijkl) = (~KLMN' AKLMN , rKLMN)<>iK<>jL<>kM<>,N'
e ijk = EKLM<>iK<>jL<>kM'
x~ = X~L<>iK<>jL'
(9.4.83)
The constitutive equations read
468 9. Elastic Ferromagnets
!J6ji = a 1Jii,j'
L = (!O"ijkl + 1l0 diejkl + !1l6diXj~ddUi,jUk" + (eijk + 1l0Xitdj)JiiVj,k
+ 1 M- - 1 - - -rXij Ilillj + -ra l Ili.klli,b
where the material moduli O"ijkl' ... , Yklmn are functions of To, Po and d.
(9.4.85)
(9.4.86)
(9.4.87)
We consider the special case of induced anisotropy due to the orientation d of the magnetic field. The material moduli are assumed to be isotropic functions of d. By means of the tables given in Appendix E (Vol. I) we can construct these functions
X~ = Xl (jij + X2 dA, aij = a 1 (jij + a2dA,
eijk = e11l0 di(jjk + e21l0(dAk + dk(jij) + e31l'fAdjdk,
O"ijkl = O"O(jij(jkl + 0"1 ((jik(jjk + (ji/(jjk) + 0"2(dkd,(jij + dA(jkl) (9.4.88)
+ 0"3(didk(jjl + did,(jkj + djdk(ji/ + djdl(jik) + 0"4 didikd"
where Xa' ea, and O"a are functions of To, Po, and 110' Here Xl and X2 are the magnetic anisotropy constants, ea are the piezomagnetic constants, O"a are the elastic constants, and aa are the exchange constants of which we set a2 = 0 and, as discussed before, we neglect higher-order terms represented by Aijkl and Yijkl' Then dissipative parts of the constitutive equations (9.4.63) and (9.4.64) retain their forms with dkl and mk, having the linear forms
1 [(aUk) (aul) ] dkl = "2 at ,I + at ,k ; 1 [(aUk) (aul) ]
Wkl = "2 at ,I - at ,k ' (9.4.89)
The dissipation moduli '1ijkl, ... , 'ij have the same general forms as in (9.4.88) under the assumption of Onsager reciprocity. However, the effect of uniaxial anisotropy on these moduli are generally small, so that expressions (9.4.66) and (9.4.67) are used in practical applications.
For some purposes, it is convenient to express the constitutive equations (9.4.84)-(9.4.86), for the uniaxial case, in the form
where
~Bi = - POl (X 1 Jii + X2 did' Ji + bijkUj.k)'
!J6ji = aJii,j'
cij = 1l0el (jij + 1l0(X2 + 1l6 e3)didj,
(9.4.90)
(9.4.91)
(9.4.92)
b;jk = Jio[eld;bjk + (el + Xl)dAk + eldkbij + (Ji6 e3 + Xl)dAdkJ,
O';jk/ = (J;jk/ + Ji6[e l (dAbk/ + dkd/bij) + el(d;dkbj/ + d;d/bjk + djd/b;k + djdkb/i)
+ (Xl + 2Ji6 e3)d;diA· (9.4.93)
The linearization process applied to the balance laws results in
op ou at + poV' at = 0,
( r OlU;) E tj;,j + Po J; - otl + F; = 0,
- oJ! Y" d x Beff - - = 0
/"'0 ot'
V x h = O.
P = - POuk,k; P = Po(1 - uk,d·
For the magnetization, we have
M = PJ! = Mod(l - ekk ) + PoJ!,
B = H + PoJ! = Ho + Mod + h - Moekkd + PoJ!,
(9.4.94)
(9.4.95)
(9.4.96)
(9.4.97)
(9.4.98)
(9.4.99)
(9.4.100)
where Mo = PoJio. Consequently, the magnetic forces FE and B~ff are given by
(9.4.101)
B~ff = h; + Mo(1 - ur,r)d; - Po (Z: bij + pi/xt! ))Ij + polal Vl)I;
- POl (eijk + JioX~dj)Uj,k' (9.4.102)
For the uniaxial anisotropy induced by the initial field d, (9.4.102) takes the form
Btff = h; + Mod; + - POl [(pJ Z: + Xl) bij + Xld;dj] ~ + polaVl)I;
- PolJiO[(e l + pJ)d;b;k + (e 2 + XddAk + e2 dkbij
(9.4.103)
9.5. Resume of Basic Equations
The theory of ferromagnetic insulators is based on the following equations.
Maxwell's Equations (in 1'") For the treatment of the interactions oflong-wave magnons and phonons,
only quasi-magnetostatic equations are kept.
470 9. Elastic Ferromagnets
v x H = 0,
tji,j + p(J; - 1\) + FiE = 0,
Boundary Conditions (across or) n x [H] = 0,
n' [B] = 0,
njPAji + AJl.i, = 0,
Constitutive Equations (nonlinear)
Ii = Yfl x Beff•
R P o~ t·· = ---x· KX, L - P LB.Jl.· J' Po oEKL ',J, J "
P o~ PAji = 2- :'l ~~ Xj,KJl.i,L'
Po Uv'nKL
Po 'I' = ~ = tUijkleijekl + h~Jl.iJl.j + eijkJl.iejk + taijJl.k,iJl.k,j'
R -Etji = Uijklekl + ekijJl.k,
Dissipative parts of the constitutive equations are
Dtji = l1jikldkl + l1jikmk'
PBi = 'rijkdjk + 'rimj.
Definitions
Rtj; = Etj; - P ~BjJ1.;, D D DR __ tj; = CTj; - P L~UJ1.;I'
CTj; = tu;) = CTij = RCTj; + DCTj;'
FE = (VB)' M = (VH)' M + tVM2,
M = Pfl,
H=Ho+h,
fl = J1.oil + p, P = Po(l - ekk),
Mo = PoJ1.o, d = flo/J1.o, J1.0 == 1J1.01,
where BO = Ho + Mod satisfies
d x Bo = O.
a- -.l!: = "" d x Beff at 11"'0 ,
V . (h + PoP - ModUk,k) = 0,
V x h = O.
FE = Mo(Vh)·d - M5Vur,r + PoMo(Vp)·d,
Biff = h; + Mod; - POl [ (P5 ~: + Xl) <>;j + X2d;dj] Jlj + polaV2Jl;
- polJ1.o[(e l + P5)d;Ojk + (e2 + xddAk + e2 dA j
+ (X2 + e3J1.~)d;djdk]Uj,k> \; = [aijkl + J1.~(e2 + Xdd;dk<>jl - J1.~e2dA<>;k]Uk,1
+ J1.0[(e2 + Xdd;<>jk + e2dAk]Jlk
+ J1.o[el <>ij + (X2 + J1.~e3)d;dj]d· p,
(9.5.22)
(9.5.23)
(9.5.24)
(9.5.25)
(9.5.26)
(9.5.27)
(9.5.28)
(9.5.29)
(9.5.30)
(9.5.31)
fIlji = aJii,j'
where iiijkl is given by (9.4.93)5' For the free energy, see (9.4.87).
9.6. Coupled Magnetoelastic Waves in Ferromagnets
A. Preliminary Remarks
(9.5.32)
(9.5.33)
In the study of spin waves in rigid ferromagnets the coupling between the spins and the motion of ions in the crystal lattice is discarded. However; in real systems, this coupling, in spite of its weakness, is present and it gives rise to displacements and oscillations in spin. More precisely, this results in the propagation of coupled magnetoelastic waves rather than purely magnetic (spin) waves or purely elastic waves in magnetically ordered crystals. Ac cording to the terminology introduced in Chapter 4, we must then account for the magnon-phonon interactions. Pioneering work in this field of research is due to Kittel [1958a, b] and Akhiezer et al. [1958],15 Since that time many physicists, electronic engineers, and theorists of the continuum have focused their attention on this problem because of its physical implications and potential engineering applications.
In practice, the coupling between magnons and phonons is quite weak, but it is especially important under certain definite resonance condictions. When these conditions are not fulfilled, magnons and phonons can be separated and regarded as independent to a high degree of accuracy. Nevertheless, they do interact with each other. The importance of this interaction is judged from the following argument. From dimensional analysis we can form the following coupling parameter
(9.6.1)
where j, Mo, Po, and CT are, respectively, a typical piezomagnetic constant, a typical saturation moment, the matter density, and a typical elastic-wave velocity. The order of magnitudes of these quantities are
j ~ 3-10, Mo ~ 1,000 Gauss,
Po ~ 10 gr/cm3, cT ~ 3 X 105 cm/sec.
15 The work of Akhiezer and his coworkers is synthesized in the monograph by Akhiezer et al. [1968]. Other prominent contributors in this field are, among others, Comstock [1964], [1965], Eshback [1963], Kaliski [1969a, b], Matthews and Lecraw [1962], Motogi [1979], Morgenthaler [1966], [1968a, b], Rezende and Morgenthaler [1969], Schlomann [1960], [1961], [1964], Strauss [1965], [1968], and Tiersten [1965b]. The treatment presented in this section is based in part on Maugin [1979a, b] and Maugin and Pouget [1981]. Other recent work is found in Alblas [1974] and Van de Ven [1975].
9.6. Coupled Magnetoe1astic Waves in Ferromagnets 473
Then' ~ 10-5-10-4, which shows the extreme weakness of the coupling. The conditions of resonance, whose numerical values indicate the regime for which the interaction is of practical interest, can be estimated in a simple fashion as follows: Let ws(k) and wp(k) be typical wave-number dependences of the frequency for pure magnons and pure phonons, respectively. We consider the excitation of magnons by phonons or vice versa. At resonance, ws(k) = wp(k) and the amplitude of magnons excited by phonons will be particularly large. This condition defines specific values ko of the wave number which, in turn, allows us to compute the corresponding values of w. The same reasoning holds true for phonons excited by magnons, so that we can speak of a definite resonance that may be referred to as the magnetoelastic (or magnetoacoustic) resonance. A typical dispersion relation for pure magnons, in the absence of an externally applied field, is given by16
(9.6.2)
where (J( and P are reduced exchange and magnetic anistropy constants. For pure transverse elastic waves in linear elasticity, we have the linear dispersion curve
(9.6.3)
Equating (9.6.2) and (9.6.3) we obtain the resonance condition which provides the roots of ko
kOl = ~ ± [~(~)2 _ fiJ1 /2. 2 2(J(wM 4 (J(WM (J(
(9.6.4)
In ad hoc units, the following approximation can be introduced from micro physical arguments:
(9.6.5)
where eo is Debye's temperature17 and v. (~ O.lc) is the order of magnitude of the velocity of electrons in the lattice. Considering (9.6.5), the approximate roots of (9.6.4) are kOl ~ PWM/CT and k02 ~ CT/(J(WM. Corresponding to these, we have the resonance frequencies in accordance with (9.6.3)
(9.6.6)
The first of these does not contain any acoustic parameter but contains the reduced anisotropy constant p. The second involves CT and the reduced exchange constant (J(. In ad hoc units, assuming that Mo ~ 1,000 Gauss, CT ~ 3 x 105 cm/sec, P ~ 1, (J( ~ 10-12 cm2, then
(9.6.7)
For Y.I.G., we get w~) ~ 1010 sec-1 (see Table 9.4.1). These numerical values
16 See Problem 9.10. 17 Debye's temperature is defined by eD = hwmax/ks where W max is the maximum circular frequency of the lattice vibrations (see Musgrave [1970, p. 231].
474 9. Elastic Ferromagnets
show that the frequencies of magnetoelastic resonance lie in the high-frequency ultrasonic (hypersound) region. This fact is important for engineering applica tions. In particular, magnetoelastic resonance can be used in hypersound generators.
Of course, a situation similar to that described above will also prevail for all the branches of elastic oscillations. In the case of elastically anisotropic ferro magnets, separation between transverse and longitudinal oscillations is not, in general, meaningful. In general, the interactions between magnons and the branches of elastic oscillations will lead to a resonance excitation by magnons of all the elastic waves and vice versa. In particular, magnetoelastic resonance can occur through both transverse and longitudinal elastic waves.
In the sequel to this section the continuum theory, developed in previous sections, will be used to examine a particular case of magnetoelastic resonance in an infinite ferromagnet. Propagation of waves in an arbitrary direction, the damping of magnetoelastic waves, the magnetoelastic Faraday effect, and possible engineering applications will be discussed briefly.
B. Plane Harmonic Waves
A ferromagnet carrying a constant bias field is disturbed from its static equilibrium position. We wish to determine the frequency of oscillations.
Basic equations of perturbations are listed in (9.5.25)-(9.5.33) where we substitute
(9.6.8)
Here p:o, uo, and hO are constant vectors, k is the wave vector, and w is the circular frequency to be determined.
Substituting (9.6.8) into (9.5.29)-(9.5.33), and the result into field equations (9.5.25)-(9.5.28), we obtain the following expressions:
{[PoWZ + Il~ez(d· k)ZJOkl - akjlmkjkm -1l~kZ(ez + Xl)dkd1
+ Mlikkk1}uf + illo[(e l + pli)kk + (Xz + ll~e3)d·kdkJd·p: + illo(ez + Xl)dk(P:°·~) + illoez(k· d)j1f + iMo(d· hO)kk = 0, (9.6.9)
-iYIl~P01(ez + Xd(d·uO)d x k - iYIl~polez(d·k)d x UO
- YIlOPOl [akZ + (Xl + pli Ho/Mo)]d x p:o + iwp:o + Yllod x hO = 0, (9.6.10)
Mo(d·k)k·uo + iPok·p:o + ik·ho = 0, (9.6.11)
k x hO = O. (9.6.12)
Equation (9.6.12) shows that hO = exk where ex is independent of k. Since electrodynamic effects are not present in Maxwell's equations, we consider the important case ex = 0, i.e., hO = O. From (9.6.10) it is clear that
(9.6.13)
9.6. Coupled Magnetoelastic Waves in Ferromagnets 475
Employing this and (9.6.11), (9.6.9) and (9.6.10) may be reduced to
([Poco2 + ll~e2(d' k)2](jkl - Ukjlmkjkm - 1l~(e2 + Xl)
. [d' kdkk, + k2dkd,] + M5kkk,}U? + illoe2k' dJi~ = 0, (9.6.14)
- iYIl~Pol (e2 + Xd(d' uO)d x k - iYIl~pole2(d' k)d x UO
- Yllopol(aP + Xl + P5Ho/Mo)d x jio + icojio = O. (9.6.15)
These equations constitute a system of six equations for the six unknowns u~ and ji~. For the solution to exist the coefficient determinant must vanish. This leads to a polynomial equation for co whose roots give the dispersion relations co = co(k), expressing the frequency as a function of the wave vector. However, the analysis is rather involved. To simplify the matter, we consider the fol lowing working hypothesis: Following Fedorovl8 we consider that the ma terial with Uijkl elastic moduli is "weakly anisotropic". According to Fedorov's criterion, effective Lame's constants or, equivalently, effective velocities of longitudinal and transverse elastic waves, cL and cT , can be introduced to express Uijkl to a sufficient degree of approximation by
(9.6.16)
where
ci == ii/Po, (9.6.17)
where 1 and ii are effective Lame's constants, so that the right-hand side of (9.6.16) "differs the least" from the expression present in the right-hand side of (9.4.93).
Using (9.6.12) and (9.6.16) in (9.6.9) and (9.6.10), we obtain
[Poco2 + M5e2(d' k)2 - PociP]uO - Po(ci- ci - POl M5)(k' uO)k
- M5(e2 + Xl)[(d· k)k' UO + ko(d· uO)]d + illoe2(d' k)jio = 0, (9.6.18)
iYIl~Pol [(e2 + Xl)(d· uO)d x k + e2(d· k)d x UO]
+ Yllopo l (ak2 + Xl + P5Ho/Mo)d x jio - icojio = O. (9.6.19)
Below we will discuss several special cases.
(i) Longitudinal Waves For the longitudinal waves, k and UO are in the same direction. Without
loss of generality, we take this common direction to be along the z-axis. k cannot be parallel to d, since (9.6.11) and (9.6.13) give k· UO = O. From (9.6.18) and (9.6.11) it follows that
(9.6.20)
476 9. Elastic Ferromagnets
in which (9.6.22)
Consequently, longitudinal waves are uncoupled from other waves and they can propagate in a direction not parallel to the anisotropy axis. In general, M6;Poct « 1 so that the phase velocity is very nearly the same as cL . Neverthe less, a real change in the velocity of propagation oflongitudinal waves can be observed if a bias external field H~ is introduced (see Section 8.8).
(ii) Transverse Waves For the waves propagating in the direction of the anisotropy axis, k is
parallel to d. From (9.6.11) it follows that
or d·uo = 0. (9.6.23)
Without loss of generality we select the z-axis in the direction of d so that
jI~ = u~ = 0.
It is convenient to introduce the circular components of UO and Po by
U± = u~ ± iu~, Ji± = jI~ ± ijI~. With these (and since d = 1), (9.6.9) becomes
where
[w + ws(k)]Ji± = ±ikfwMJiou±,
(9.6.24)
(9.6.25)
(9.6.26)
(9.6.27)
(9.6.28)
(9.6.29)
From (9.6.26) with Ji± = 0, it is clear that W T is the transverse elastic wave frequency modified by the bias magnetic field (compare with Section 8.8). Similarly, for u± = 0, (9.6.27) shows that Ws is none other than the pure magnon frequency. The coupling of these waves is through f.
Now consider the case oftransverse magnetoelastic waves whose dispersion relation is given by the coupled equations (9.6.26) and (9.6.27). Upon elimi nating the amplitudes u± and jI± between these equations, we obtain the dispersion relations
D+(w, k) == [w 2 - wj.(k)] [w - ws(k)] - (wMwj.(k) = 0, (9.6.30)
D-(w, k) == [w 2 - wj.(k)] [w
With 56 Illustrations
Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong
A.C. Eringen Princeton University Princeton, N.J. 08544 U.S.A.
G.A. Maugin Laboratoire de Modelisation
en Mecanique Universite Pierre et Marie
Curie et C.N.R.S. 75252 Paris 05 France
Library of Congress Cataloging in Publication Data Eringen, A. Cerna!.
Electrodynamics of continua / A.C. Eringen, G.A. Maugin. p. cm.
Includes bibliographical references. Contents: I. Foundations and solid media - 2. Fluids and complex media.
I. Fluid mechanics. 2. Electrodynamics. 3. Magnetohydrodynamics. mechanics. I. Maugin, G. A. (Gerard A.), 1944-
4. Continuum
Printed on acid-free paper
Softcover reprint of the hardcover 1st edition 1990
89-21880 CIP
All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer-Verlag, 175 Fifth Avenue, New York, NY 10010, U.S.A.), except for brief excerpts in connection with reviews or scholarly analysis. Use in connec tion with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use of general descriptive names, trade names, trademarks, etc., in this publication, even if the former are not especially identified, is not to be taken as a sign that such names, as understood by the Trade Marks and Merchandise Marks Act, may accordingly be used freely by anyone.
Typeset by Asco Trade Typesetting Ltd., Hong Kong.
987 6 543 2 1
ISBN-13: 978-1-4612-7928-0
DOl: 10.1007/978-1-4612-3236-0
Preface to Volume II
The first volume of Electrodynamics of Continua was devoted mainly to the development of the theory of, and applications to, deformable solid media. In the present volume we present discussions on fluid media, magneto hydro dynamics (MHD) (Chapter 10), electrohydrodynamics (Chapter 11), and media with more complicated structures. Elastic ferromagnets (Chapter 9) and ferrofluids (Chapter 12) require the inclusion of additional degrees of free dom, arising frQm spin-lattice interactions and supplementary balance equations.
With the discussion of memory-dependent materials (Chapter 13) and nonlocal electromagnetic theory (Chapter 14), we account for the nonlocal effects arising from motions and fields of material points, at past times and at spatially distant points. Thus, the damping of electromagnetic elastic waves, photoelasticity, and streaming birefringence are the subjects of Chapter 13. Nonlinear constitutive equations developed here, and in Chapter 14, are fundamental to the field of nonlinear optics and nonlinear magnetism. The content of these chapters is mostly new and is presently in the development stage. However, they are included here in the hope that they will stimulate further research in these important fields.
Volume II is self-contained and can be studied without the help of Volume I. However, certain prerequisites are necessary. In order to provide quick access to the basic equations and the underlying physical ideas, we have included a section (Section 9.0) in Chapter 9, where the constitutive equations for electromagnetic fluids are also presented. This section serves as a founda tion for the fluid media discussed in Chapters 10 and 11. Basic equations and the underlying physical ideas, necessary for each chapter, are presented at the beginning of each chapter.
TIle second volume extends the development of the first volume to richer and newer grounds. Because of space limitations, and the logical development and continuity of the text, recent developments in mixtures, semiconductors, superconductivity, nonlinear optics, and electronic theories could not be included.
It can be said that the electrodynamics of continua touches every aspect of
VI Preface to Volume II
the world of physics. In this regard, the present volume hopes to stimulate certain aspects. This volume may be used as a basis for several graduate courses in engineering schools, applied mathematics, and physics departments. It also contains fresh ideas and directions for further research. Ferromag netism and plasticity, memory-dependent materials as applied to polymers, nonlinear optics, and the nonlocal theory developed in Chapter 14 are can didates for deeper research, penetrating into microscopic and atomic scale phenomena.
Nonlocal theory (Chapter 14) is still in its infancy. However, it is a parallel discipline to the well-developed field oflattice dynamics. It has the advantage that it can be used to discuss physical phenomena in intermediate scales between microscopic and atomic dimensions.
Electromagnetic theory properly falls into the domain of the theory of relativity. Consequently, we have included a chapter (Chapter 15) on this subject to close this volume.
Contents (Volume II)
CHAPTER 9
Elastic Ferromagnets. 437
9.0. An Overview of Basic Equations 437 9.l. Scope of the Chapter. 443 9.2. Model of Interactions 444
A. Gyroscopic Nature of the Spin Density. 445 B. Spin-Lattice Model ofInteractions. 446
9.3. Balance Equations 449 A. Global Balance Equations 449 B. Local Balance Equations 450 C. The Clausius-Duhem (C-D) Inequality 452 D. Boundary Conditions 453
9.4. Constitutive Theory . 453 A. Saturated Ferromagnetic Elastic Insulators 453 B. Free Energy 456 C. Correspondence Between the Microscopic Model and the
Continuous Representation . 458 D. Infinitesimal Strains . 460 E. Centro symmetric Cubic Crystals 461 F. Uniaxial Crystals. 463 G. Elementary Dissipative Processes 464 H. Small Fields Superposed on a Constant Bias Magnetic Field 466
9.5. Resume of Basic Equations . 469 9.6. Coupled Magnetoelastic Waves in Ferromagnets . 472
A. Preliminary Remarks 472 B. Plane Harmonic Waves. 474 C. Damping of Magnetoelastic Waves. 482 D. Magnetoelastic Faraday Effect . 484
9.7. Applications of the Magnon-Phonon Coupling 487 A. Pumping and Temporal Magnon-Phonon Conversion 487 B. Drift-Type Amplification of Magnetoelastic Waves 490
viii Contents (Volume II)
9.8. Other Works. 490 A. Continuum Descriptions of Ferromagnetic Deformable Bodies. 490 B. Wave Propagation . 491 C. Ferrimagnetic Deformable Bodies. 492 Problems. 497
CHAPTER 10
Magnetohydrodynamics .
10.1. Scope of the Chapter 10.2. Basic Equations of Electromagnetic Fluids 10.3. Magnetohydrodynamic Approximation 10.4. Perfect Magnetohydrodynamics
A. Field Equations. B. "Frozen-In" Fields . C. Bernoulli's Equation in Magnetohydrodynamics. D. Kelvin's Circulation Theorem in Magnetohydrodynamics E. Alfven Waves F. Generalized Hugoniot Condition .
10.5. Incompressible Viscous Magnetohydrodynamic Flow A. Magnetohydrodynamic Poiseuille Flow B. Magnetohydrodynamic Couette Flow.
10.6. One-Dimensional Compressible Flow. 10.7. Shock Waves in Magnetohydrodynamics.
A. Classification of Magnetohydrodynamic Shock Waves B. Shock Structure .
10.8. Magnetohydrodynamic Equilibria. 10.9. Equilibrium of Magnetic Stars. 10.10. Magnetohydrodynamic Stability .
A. The Energy Method B. Equilibrium States and Perturbations. C. Quantities Conserved in the Perturbation D. Elementary Perturbations . E. Change in the Energy Integrals F. Application to the Linear Pinch Problems.
CHAPTER II
502
502 503 507 512 512 513 514 515 515 516 518 518 520 521 525 526 530 530 533 537 537 539 540 540 543 545 547
Electrohydrodynamics 551
11.1. Scope of the Chapter 551 11.2. Field Equations. 552 11.3. Charge Relaxation . 554 1 i.4. Stability Condition . 554 11.5. Helmholtz and Bernoulli Equations 555
A. Generalization of the Helmholtz Equation 555 B. Vorticity Generation in a Space-Charge-Loaded Electric Field. 556 C. Generalization of Bernoulli's Equations 556
11.6. Equilibrium of a Free Interface. 557
Contents (Volume II) IX
11.7. Effect of Free Charges at an Interface. 11.8. Electrohydrodynamic Stability. 11.9. Electrohydrodynamic Flow in a Circular Cylindrical Conduit 11.10. Electrogasdynamic Energy Converter.
Problems.
Ferrofluids .
12.1. Scope of the Chapter 12.2. Constitutive Equations of Ferromagnetic Fluids. 12.3. Theory of Ferrofluids
A. Equilibrium Constitutive Equations . B. Nonequilibrium Constitutive Equations C. Balance Laws
12.4. Existence and Stability of a Constant Magnetization in aMoving
558 561 567 569 573
574
Ferrofluid 582 12.5. Ferrohydrodynamic Approximation . 585 12.6. Some General Theorems in Ferrohydrodynamics 587
A. Generalization of the Helmholtz Equation 587 B. Generalization of the Bernoulli Equation. 588
12.7. Ferrohydrostatics 589 A. Equilibrium of a Free Surface . 589 B. Energy Conversion . 590
12.8. Ferrohydrodynamic Flow of Nonviscous Fluids. 591 A. Preliminary Remarks 591 B. Steady Two-Dimensional Source Flow 593
12.9. Simple Shear of a Viscous Ferrofluid . 596 12.10. Stagnation-Point Flow ofa Viscous Ferrofluid 598 12.11. Interfacial Stability of Ferrofluids 603 12.12. Other Problems in Ferrofluids . 608
Problems. 609
CHAPTER 13
Memory-Dependent Electromagnetic Continua.
13.1. Scope of the Chapter 13.2. Constitutive Equations. 13.3. Thermodynamics of Materials with Continuous Memory 13.4. Quasi-Linear and Linear Theories.
A. Quadratic Memory Dependence B. Finite-Linear Theory C. Linear Theory D. Linear Isotropic Materials . E. General Polynomial Constitutive Equations .
13.5. Rigid Bodies. A. Continuous Memory B. Polynomial Constitutive Equations
611
611 612 613 620 621 622 624 627 629 630 630 631
x Contents (Volume II)
13.6. Dispersion and Absorption. 13.7. A Simple Atomic Model 13.8. Free Motion of an Electron Under Magnetic Field 13.9. Electromagnetic Waves in Memory-Dependent Solids 13.10. Electromagnetic Waves in Isotropic Viscoelastic Materials. 13.11. Nonlinear Atomic Models for Polarization . 13.12. COI}~titutive Equations of Birefringent Viscoelastic Materials
A. Rate-Dependent Materials. B. Linear, Continuous Memory of Strains
13.13. Propagation of Waves in Birefringent Viscoelastic Materials 13.14. Photoviscoelasticity.
Problems.
CHAPTER 14
632 634 637 641 647 652 657 659 660 661 666 673
Nonlocal Electrodynamics of Elastic Solids 675
14.1. Scope of the Chapter 675 14.2. Constitutive Equations. 677 14.3. Thermodynamics 679 14.4. Linear Theory . 682 14.5. Material Symmetry. 686 14.6. Nature of Nonlocal Moduli 688 14.7. Nonlocal Rigid Solids . 693 14.8. Electromagnetic Waves. 694 14.9. Point Charge. 696 14.10. Rigid Magnetic Solids 696 14.11. Superconductivity . 699 14.12. Piezoelectric Waves. 702 14.13. Infrared Dispersion and Lattice Vibrations 704 14.14. Memory-Dependent Nonlocal Electromagnetic Elastic Continua 707 14.15. Linear Nonlocal Theory for Electromagnetic Elastic Solids. 710 14.16. Natural Optical Activity 712 14.17. Anomalous Skin Effects. 713
Problems. 715
CHAPTER 15
15.1. Scope ofthe Chapter 15.2. Space-Time, Notation
A. Space-Time. B. Special Relativity C. General Relativity D. Inertial Frames and Rest Frame E. Proper Time, Timelikeness . F. Space and Time Decomposition G. Antisymmetric Tensors and Axial Four-Vectors.
716
Contents (Volume II) Xl
15.3. Relativistic Kinematics of Continua 725 A. Motion, Strain Tensors. 725 B. Relativistic Rate of Strain . 727 C. Contravariant Convective Time Derivative 728
15.4. Covariant Formulation of Maxwell's Equations in Matter 729 A. Electromagnetic Fields . 729 B. Integral Formulation of Maxwell's Equations 731 C. Four-Vector Formulation of Maxwell's Equations 733
15.5. Relativistically Invariant Balance Laws 734 15.6. Electromagnetic Interactions with Matter 738 15.7. Thermoelastic Electromagnetic Insulators 741 15.8. Electromagnetic Fluids. 743
A. General Nondissipative Case . . 743 B. Linear Electromagnetic Constitutive Equations 744 C. Elementary Dissipative Processes . 745 D. Relativistic Perfect Magnetohydrodynamics . 746
15.9. Further Problems in the Relativistic Electrodynamics of Continua. 747 Problems. 748
References
Index
753
II
CHAPTER 2
CHAPTER 5 Constitutive Equations
9.0. An Overview of Basic Equations
Basic equations of electrodynamics of continuous media were developed in Chapters 3 and 5. Here we give a summary of these equations, with a supple mentary discussion regarding their extensions to some more complex media, which will be elaborated in this volume.
Macroscopic electromagnetic theory is based on two sets of equations:
(I) Balance Laws: These consist of Maxwell's equations and mechanical balance laws. These equations are valid irrespective of material con stitution.
(II) Constitutive Equations: These equations characterize the nature of the material media. They express the response of the medium to external stimuli. Consequently, they have different forms depending on the nature and constitution ofthe bodies. Elastic solids, viscous fluids, ferromagnetic materials, memory-dependent electromagnetic elastic solids, and electro magnetic fluids all have different constitutive equations.
For simple materials balance laws are the same, irrespective of the material constitution, but, constitutive equations change from one type of material body to the next. As discussed in Chapter 5, electromagnetic elastic solids have different constitutive equations from those of electromagnetic fluids. However, for some complex media, e.g., ferromagnetic solids, additional internal degrees of freedom are brought into play. In such cases both balance laws and constitutive equations will have to be supplemented by additional equations. An example of such media is the subject of the present chapter. Ferrofluids, discussed in Chapter 12, is another example of such complex media, where the new degree offreedom arising from the spin-lattice interaction is brought into play. Among many other important fields requiring the considera tion of internal degrees of freedom, we mention briefly ferroelectric media, semi-conductors, liquid crystals (DeGennes [1974], Eringen [1979a, b]), and magnon-phonon interactions (Matthews and Lecraw [1962]).
Here we give a summary of basic equations for simple media as discussed
438 9. Elastic Ferromagnets
in Chapters 3 and 5. Ferromagnetic media and ferrofluids are discussed in Chapters 9 and 12, respectively. Chapters 13 and 14 take up memory effects and nonlocality. In Chapter 13 the effects of past deformations and electro magnetic fields are brought into play, and in Chapter 14 those occurring at points distant from the reference point are introduced. In all these theories the balance laws, given below, remain valid, possibly with supplementary terms and/or equations.
I. Balance Laws
Balance laws are the local field equations consisting of Maxwell's equations and the mechanical balance equations. These are valid in the body, with volume 1/, excluding the discontinuity surface (J, which may be sweeping the body with its own velocity v. On the discontinuity surface, we have the jump conditions which provide the boundary condition on the surface a1/ of the body, when (J coincides with a"r.
A. Maxwell's Equations (in 1/ - (J)
V·O - qe = 0,
1 aB VxE+--=O
1 ao 1 v x H---=-J c at c'
aa~e + v . J = 0.
B. Mechanical Balance Equations (in 1/ - (J)
Po = plII~j2 or p + pV·v = 0,
(9.0.1)
(9.0.2)
(9.0.3)
(9.0.4)
(9.0.5)
(9.0.6)
(9.0.7)
t[kll = t&'[kPll + B[kAIl' (9.0.8)
p(1' + e1] + ery) + tklVl.k - V· q - ph + PkJk + AJ3k - ~kt&'k = 0, (9.0.9)
py == pry - V· (q/e) - (ph/e) ?: 0.
Accompanying these equations, we have the jump conditions.
C. Jump Conditions (on (J) 0·[0] = We'
n x [ E + ~ V X B ] = 0,
o· [B] = 0,
nX[H-~vXDJ=O, (9.0.14)
n'[J - qev] = 0, (9.0.15)
where surface polarization and surface currents have been discarded. In this regard, see Chapter 3.
[p(v - v)]n = 0,
[(p('I' + el1) + ~. P + 1PV2 + 1(E2 + B2)} (Vk - vd
(9.0.16)
(9.0.17)
[PI1(V - v) -~qln ~ O. (9.0.19)
There is no jump condition corresponding to (9.0.8).
E. Mechanical Surface Traction (on a1/') In the absence of the moving discontinuity surface, the mechanical surface
traction is given by (9.0.20)
F. Definitions of Electromagnetic Field and Loads The electromagnetic fields in the fixed laboratory frame RG are denoted by
D, E, B, H, P, M. In the frame Rc, co-moving with the reference point, they are denoted by script majuscule letters,~,~, PlJ, Yt', fYJ, and At. Cauchy's stress tensor is denoted by tk/ and the electromagnetic stress tensor by tf,. A part of tkl is the symmetric stress tensor Etkl' The electromagnetic body force is given by FE, the electromagnetic momentum by G, and the Poynting vector by 9':
1 ~ = E + -v x B,
c
c
c
'I' = e - el1 = 6 - el1 - p-l~kPk'
t~l = Pk~l - BkAl + EkEl + BkBl - 1(E2 + B2 - 2.${· B)(jkl'
440 9. Elastic Ferromagnets
II. Constitutive Equations
Constitutive equations were discussed thoroughly in Chapter 5. According to the axioms of constitutive theory, the fields are divided into two distinct classes:
(a) the dependent variables; (b) the independent variables.
The dependent variables are considered to be functionals of the indepen dent variables.
The dependent variables, at a reference point X, at time t, are:
'P = free energy,
q = heat vector,
P = polarization vector,
The independent variables are:
8 = electric field vector,
They are given at all points X' of the body, at all past times, including the present time, -00 < t ' ::;; t.
<W'(X/, t'} = {e, ve, C, 8, B}, X' E V, 00 < t ' ::;; t. (9.0.23)
For more complex media, such as ferromagnetic elastic solids and viscous fluids, other additional variables are brought into play, as discussed in this chapter and in Chapter 12.
1. Nonlocal Media
The general theory of constitutive equations for memory-dependent nonlocal media begins with the formal constitutive equation
~(X, t) = ~[<W'(X/, t')J, (9.0.24)
where ~ is a functional of <W'(X/, t'} over space and tjme. This is the basis of the nonlocal elasticity discussed in Chapter 14.
9.0. An Overview of Basic Equations 441
2. Memory-Dependent Local Media
For the local theory, only the values of the fields <??I(X', t') at the reference point X are considered. Thus, 1Z is a functional of only the time histories <??I(t') at the reference point X
1Z(X, t) = ff[<??I(t')], -00 < t' :::;; t. (9.0.25)
For simple memory-dependent materials, this covers all sorts of viscoelastic solids and fluids presented in Chapter 13.
3. Electromagnetic Elastic Solids (Section 5.8)
For local elastic solids, nonlocality and memory effects are discarded. In ,this case then, 1Z is a function of <??I at (X, t).
1Z = F(<??I). (9.0.26)
4. Electromagnetic Viscous Fluids
For fluids, C, in (9.0.23), is replaced by the mass density p and a new variable dkl is included (Section 5.12), e.g.,
(9.0.27)
Similar equations are written for 1], Pk, Jltk, tkl , qk' and Jk' Constitutive equations are subject to various invariance requirements as
elaborated in Chapter 5. Among these, the restrictions arising from the second law of thermodynamics (9.0.10) are prominent. These restrictions are explored separately in each of the following chapters, except Chapter 10, on electro magnetic fluids which was discussed in Volume 1, Section 5.12. In order to make Volume 2 self-contained we present here a brief discussion.
Constitutive equations for electromagnetic viscous fluids begin with (9.0.27). Similar equations, involving the same set of independent variables, are assumed to be valid for 1], q, t, P, Jt, and J.
Eliminating ph/() between (9.0.9) and (9.0.10) we obtain
., 1 . . py == -p('¥ + 1]() + tk1vl,k + eqk8,k - PeCk - JltkBk + ASk ~ O. (9.0.28)
Substituting 'i' from (9.0.27) into this inequality we have
where we used (9.0.6) to replace p and iI)troduced the spin tensor Wkl =
V[k,lj' This inequality is linear in 0, Wkl , dkl , li.k' $k' and 13k, The necessary and
442 9. Elastic Ferromagnets
sufficient conditions, for (9.0.29) to remain in one sign, are
and
o\{l of) = 0,
t[klJ = 0,
(9.0.30)
(9.0.31)
where Dt is the dissipative stress tensor and 11: is the thermodynamic pressure, defined by
o\{l 11:= -Op-l. (9.0.32)
From the first three equations of (9.0.30), it is clear that \{I is independent of d and Vf) and the stress tensor is symmetric. Thus,
P[krffl] + vIt[kBl] = O. (9.0.33)
If Dt, q, and ,$ are continuous in d, Vf), and iff, from (9.0.31) it follows that
Dt = 0, q = 0, ,$ = 0, when d = 0, Vf) = 0, iff = O. (9.0.34)
Thus, we have proved the following theorem (Eringen [1980, Sect. 10.24]):
Theorem. The constitutive equations of electromagnetic fluids do not violate the second law of thermodynamics, if they are of the form (9.0.30) subject to (9.0.31)-(9.0.34).
Equation (9.0.33) implies that, in fluids the electromagnetic couple vanishes. Since the free energy function \{I must be an objective scalar function of iff
and B, it can depend on these variables only through their invariants.
(9.0.35)
where 13 is selected so as to satisfy the invariance under the time-reversal. Hence
\{I = \{I(1 1, 12, 13, f), p-l),
o\{l rJ = -ai)'
3 (g'B)B ,
At= -2P[:~ B + :~ (g. B)g J (9.0.36)
Constitutive equations for ot, q, and f can be constructed by using Table E2 (Vol. I) to obtain the generators of these quantities as functions of the joint invariants of d, ve, g, and B. Below we give the linear theory.
Linear Constitution Equations
The free energy for the linear theory is a quadratic isotropic function, but P, At, ot, q, and f are linear in independent variables. Hence
1 1 'P='P _-XEg·g_-XBB·B
o 2p 2p ,
a'Po 1 aXE 1 axB 11 = -Te + 2p ae g · g + 2pae B ' B,
P = xEg,
q = KVe + KEg,
f = (Jg + (Jove,
where the material moduli 'Po, XE, XB ; the viscosities Av, .uv; the heat conduction coefficients K, KE; and the electric conduction coefficients (J and (Jo are func tIOns of p-l and e. Coefficients of KE and (Jo are known as Peltier and Seebeck coefficients.
From the Clausius-Duhem (C-D) inequality (9.0.31), it follows that
K ;:0: 0, (J ;:0: 0, 3Av + 21Lv ;:0: 0, .uv ;:0: o. 4K(Je-1 - (KEe-1 + (J°f ;:0: O.
(9.0.38)
This completes the constitutive theory for the electromagnetic theory of viscous fluids.
9.1. Scope of the Chapter
Chapter 8 was devoted to the magnetoelasticity of solids which present no magnetic ordering (e.g., paramagnetic bodies), or bodies in which this ordering does not manifest itself (e.g., the so-called soft ferromagnetic bodies). Here we examine the case of magnetic solids in which the ordered arrangement of magnetic spins, be it of the ferromagnetic or antiferromagnetic type, has
444 9. Elastic Ferromagnets
important consequences for magnetoelastic couplings. Most of the chapter, however, is devoted to the case of hard ferromagnetic bodies. As was briefly recalled in Section 4.5, the most important coupling phenomenon is the so-called phonon-magnon coupling with the allied magneto acoustic resonance effect. On a microscopic scale, this phenomenon follows from the fact that both phonons and magnons obey the Bose-Einstein statistics in quantum physics, and are therefore expected to interact in a sufficiently strong manner. Here, however, all discrete details are avoided so that, of necessity, a heuristic model of interactions must be considered; this is the object of Section 9.2. The continuum formulation of a theory of elastic ferromagnets, apart from the few new ingredients introduced by the model of interactions, then follows the same development as other continuum theories (see Chapters 3 and 5). Local balance equations are given in Section 9.3, and the constitutive theory for thermoelastic ferromagnetic insulators is developed in Section 9.4. Special attention is given to the cases of quadratic free energy, infinitesimal strains, the correspondence between microscopic and macroscopic representations of exchange forces, cubic and uniaxial crystals, and elementary dissipative processes such as viscosity and spin-lattice relaxation.
Section 9.5 presents a resume of the basic equations. Section 9.6 introduces the reader to the study of coupled magnetoelastic waves in ferromagnetic insulators. The effects of magnetoacoustic resonance, damping of magneto elastic waves, and the magnetoelastic Faraday effect are exhibited analytically and illustrated by many curves. Applications of magnon-phonon couplings are examined in Section 9.7. These include pumping and temporal magnon phonon conversion. Section 9.8 discusses briefly more general problems such as the case of deformable antiferromagnets.
Dynamic magnetoelastic effects in magnetically ordered solid bodies occur in the ultrasonic (hypersound) region, and are particularly important from the viewpoint oftechnological applications which include hypersound generators, high-frequency magnetostrictive transducers, the amplification of waves by using nonlinear interactions, the design of wave filters and delay lines with fixed delay or electronically variable delay, analysis of the internal magnetic field, internal-magnetic field synthesis, etc. A great variety of physical effects, which these materials can be made to exhibit, to greater or lesser degree, has been utilized in the ever-broadening search for new components. The strong links between solid state physics on the one hand, and the electronics industry on the other, have resulted in an area of research scrutinized simultaneously by applied physisists, electrical engineers, and scientists in the field of mechanics.
9.2. Model of Interactions
In previous chapters we have dealt with paramagnetic elastic bodies. Here we focus our interest on the case of ferromagnetic elastic bodies. Since ferro magnetism is, by its very nature, a quantum mechanical effect, and we intend
9.2. Model of Interactions 445
to consider a phenomenological approach dealing with continuous fields, there is a need to introduce a heuristic model of interactions. This model will serve to describe, in the language of continuum physics, the interactions which take place between the lattice continuum, i.e., the usual substrate of elastic defor mations and the magnetization field.!
In the quantum-mechanical sense, individual particles have associated with them a magnetic moment and an internal angular momentum called spin. Electrons are also believed to provide a predominant contribution to the magnetic moment of an atom (see Section 4.4). In continuum theory it is convenient to refer to the continuum, which smoothly represents the discrete distribution of individual spins over the material body, as the "electronic" spin continuum.2 S\nce the field equations governing the lattice continuum-the equations of motion-have already been examined in detail in Chapter 3, the main purpose of this section is to elaborate upon the ingredients which allow the formulation of the field equations that govern the electronic spin continuum.
A. Gyroscopic Nature of the Spin Density
In Section 9.0 it was mentioned that, in ferromagnetic materials, spin-lattice interactions play an important role in this magnetic behavior. The field primarily associated with the electronic spin continuum is the intrinsic spin density per unit mass in the co-moving frame. This is introduced by the isotropic gyromagnetic relationship (compare Section 2.2).
S(x, t) = y-! p(x, t}. (9.2.1)
The isotropy of the effect follows from the fact that only one type of particle, the electron, provides a predominant contribution. Accordingly, the gyro magnetic ratio y is not very different from the constant y. = - e/moc (here only spin angular momentum is accounted for, see (2.2.10», and p and S
depend on the position x at time t in the present configuration .Yt of the material body.
In order to treat phenomenologically the magnon-phonon coupling (thus long-wave magnons) we consider low levels of energy, i.e., low temperatures. Consequently, the present discussion is limited to the case of temperatures B which are much smaller than the Curie temperature Be of the material: B « Be. In these conditions the local magnetization may be considered saturated with a time-independent magnitude. It follows from these assumptions that
p' p = /1; = const. (9.2.2)
1 Such a model has been devised by H.F. Tiersten [1964]. See also Maugin [1976b] for general electromagnetic continua. 2 As usual, not too much attention should be paid to the wording, which only provides a modus vivendi; and it must be noticed that there is not necessarily any one-to-one correspondence between microscopic concepts and macroscopic ones.
446 9. Elastic Ferromagnets
and
But via the equation of motion (2.2.1) we can also write
Ji = Ji(X, t),
XE V,
/1i,K/1i =0.
(9.2.3)
(9.2.4)
(9.2.5)
(9.2.6)
Direct consequences of (9.2.3) are as follows: since I Jil = const., if Dn denotes the co-rotational derivative (see Section 1.12) with respect to a frame rigidly attached to Ji in Rc(x, t), we will have DnJi = ° where, symbolically, Dn = d/dt - n x . Thus it is necessarily of the form
s=flxs.
By taking the vector product of this with Ji we find that
n = /1;2 [Ji X ft + (w n)Ji],
(9.2.7)
(9.2.8)
where n is called the precessional velocity vector of the magnetization density or the spin density. Equation (9.2.7) reminds us of the equation governing a gyroscope in a frame attached to it. Indeed, the gyroscopic character of the spin s is asserted from (9.2.7')2:
n· s = y-1 g. it = 0, (9.2.9)
where s is a couple per unit mass. Equation (9.2.9) states that, in a real precessional velocity field fl, the couple s = y -1 it does not produce any power. Such a couple is said to be a gyroscopic or d'Alembertian inertia couple. Consequently, the inertia associated with the field Ji will not participate in the statement of the first principle of thermodynamics.
B. Spin-Lattice Model of Interactions
For the sake of simplicity we consider nonelectrically polarized ferro magnets. 3 Thus,
P =0, 1t = 0, (9.2.10)
everywhere in the body at any time. Then the usual motion of the deformable body
x = x(X, t) (9.2.11)
and the magnetization function (9.2.5) may be considered as defining a kind
3 However, there is no difficulty in accounting for nonzero P. In this regard, see Tiersten and Tsai [1972J and Collet and Maugin [1974].
9.2. Model of Interactions 447
of generalized motion for the total lattice-plus-spin continuum. With each material point in the body there is associated, in a unique way, a magnetization field or a spin field, so that the electronic spin continuum cannot translate with respect to the lattice continuum at that point. Therefore, it is clear that the spin continuum expands and contracts with the lattice continuum and must occupy the same volume with its volumetric behavior being governed by the usual continuity equation. As usual, the lattice continuum responds to volume and surface forces (thus, to stresses) and to volume couples. We suppose here that it does not possess any mechanism to respond to surface couples.4
Based on this observation, the conservation oflinear momentum states that whatever force of magnetic origin (e.g., the ponderomotive force) is applied to a point on the spin continuum, it is transferred directly to the lattice con tinuum at that point. Indeed, by its very nature, the spin continuum can respond only to couples, which may be either volume or surface couples. In view of (9.2.10) the ponderomotive couple (see (3.5.44)) applied to the spin continuum is reduced to
cE = .H x B = PI1 x B. (9.2.12)
As far as the interactions between the lattice continuum and the spin con tinuum are concerned, they must necessarily be of the couple type (see Figure 9.2.1). We assume that this couple results from the existence ofa local magnetic induction field LB, so that the couple exerted by the lattice continuum on the spin continuum is given by the "recipe" (compare (9.2.12)):
(9.2.13)
Since the angular momentum is conserved between the two continua, an equal and opposite couple
C(S/L) = -e(L/S) = LB x .H= P LB x P (9.2.14)
is exerted on the unit volume of the lattice continuum. Finally, in order to account for ferromagnetic exchange effects, we must
consider that each spin of the electronic spin continuum experiences from its nearest neighbors an action caused by the exchange forces of a quantum mechanical nature (see Section 4.5). Given the rapid fall with distance of this type of force, it will be assumed that they give rise to contact (i.e., surface) actions in much the same manner as the stress vector for the lattice con tinuum. More specifically, a surface exchange contact force !!T is introduced which produces a couple per unit area equal to .H x !!T on the spin con tinuum. After the discussion given in Section 4.5, it is clear that !!T will be related in some way to the spatial nonuniformities in the magnetization field. !!T is an axial vector and has the dimension of a magnetic field times length,
4 This possibility, however, is envisaged in Collet and Maugin [1975] and Collet [1978].
448 9. Elastic Ferromagnets
LATTICE CONTINUUM (LC) (I ne rt i a : p v)
Volume c (SCI LC) couples
Maxwell's SPIN CONTINUUM (SC) equations (Inertia: p)-1 ~)
force f
--..""."", ,....";,,,. B~
Surface coup! ~
Figure 9.2.1. Interactions in deformable ferromagnets (from Maugin [1979c, p. 253]). Reprinted with permission of Elsevier Science Publishers.
or of a surface distribution of magnetic dipoles. Similar to the generalized stress principle (3.8.3), it is assumed that the value of :!I on 0"Y depends only on the normal vector n of the surface, i.e., fT = 5(0) = fT(x, t; n), x E 0"Y. This implies a first-order gradient theory as far as magnetization effects are con cerned. Since :!I acts through the couple oR x fT, only the portion of 5(0) which is orthogonal to oR is effectively defined, so that, without loss of generality, we can set forth the condition
5(o)'oR= 0
on 0"Y. A similar condition may be imposed on LB. That is,
LB'oR= 0 at all points in "Y.
(9.2.15)
(9.2.16)
We are now in a position to set forth the global balance laws that govern non polarized moving ferromagnetic bodies.
9.3. Balance Equations 449
A. Global Balance Equations
Using the notation of Section 3.10, and taking into account the model just constructed, we have the following global balance laws, in addition to Maxwell's equations «9.0.1) (9.0.5)),
Conservation of Mass:
dd f P dv = o. t "Y"-a
Balance of Momentum for the Lattice Continuum:
dd f PVi dv = f (Ph + Fn dv + r t(O)i da t "Y" -a "Y" -a J a"Y"-a
Balance of Moment of Momentum for the Lattice Continuum:
dd f (x x PV)i dv t "Y"-a
Balance of Angular Momentum for the Electronic Spin Continuum:
d f -1 f E f -d PY fl dv = [c + C(L/S)] dv + Pfl X 9(0) da, t "Y" -a "Y" -a a"Y"-a
Conservation of Energy for the Combined Continuum:
dd f p(!v2 + e) dv = f (pf·v + ph + WE) dv t "Y" -a "Y" -a
+ f [w;]np da, a(l)
(9.3.1)
(9.3.2)
(9.3.3)
(9.3.4)
(9.3.5)
As noted in Section 9.0, for the first time, here we encounter a new balance law (9.3.4), in addition to modifications introduced by the spin degrees of freedom, in other balance laws.
450 9. Elastic Ferromagnets
Principle of Entropy
dd Ie PY/dv~I p~edv+ r. e-1q·nda. t ,t -(1 "//_(1 JaY'-(1
(9.3.6)
All symbols bear the same significance as in Chapter 3. 5(0) is the only new field which contributes to the expression of the first principle of thermo dynamics, since the inertia associated with J! yields a zero contribution (see (9.2.9)) and LB cannot contribute because of the action-reaction principle between the two continua. The power developed by 5(0) is estimated in accordance with the rule that a magnetic field A, acting on a magnetization field At = PJ!, produces a power pA . Ji. As before O'(t) is a moving discontinuity surface having velocity v with respect to the laboratory frame RG •
B. Local Balance Equations
The localization of equations (9.3.1)-(9.3.3) is made, as modeled by (3.10.3):
Conservation of Mass: jJ + pVk,k = 0 in "r - 0',
[P(Vi - v;)]ni = 0 on O'(t),
Balance of Momentum for the Lattice Continuum:
PVi = pj; + N + tji,j in "f/' - 0',
[pvi(vj - Vj) - tji - (t}f + vpJ]nj = 0 on O'(t),
with t(D)i = njtji on o"f/' - 0';
Balance of Moment of Momentum for the Lattice Continuum:
eijk(tjk + P LBj!1k) = 0 in "f/' - 0'.
Applying the alternation symbol to the free index this reads
tUiJ = - P LB[j!1iJ in "f/' - 0'.
(9.3.7)
(9.3.8)
(9.3.9)
(9.3.10)
(9.3.11)
(9.3.12)
(9.3.13)
Applying the tetrahedron argument (3.8.4) to (9.3.4) we can show that
(9.3.14)
where £!lJj; is a new (general second-order) tensor which plays a role similar to the stress tensor tji . Since 5(0) is supposed to represent the effects of exchange forces, we shall refer to flj]j; as the spin-spin interaction or exchange-force tensor. Taking into account (9.3.14), the localization of equation (9.3.4) yields at once the following results:
Balance of Angular Momentum for the Electronic Spin Continuum:
y-lp; = e;jk!1j(Bk + LBk + P-1£!lJzk,Z) + p-1e;jk£!lJzk!1j,Z in"f/' - 0', (9.3.15)
[py-l !1;(vj - v) - e;pQ!1pflj]jQ]nj = 0 on O'(t). (9.3.16)
9.3. Balance Equations 451
If we note that p. is ofthe form (9.2.7), and compare it with (9.3.15), we deduce
p. = n x J.1 in "Y - (J, (9.3.17)
where now n = _yBeff (9.3. IS)
with (9.3.19)
and or (9.3.20)
The latter is a direct consequence of the conditions oflow temperature (J « (Jc
and saturation of the magnetization. Equations (9.3.18) and (9.3.17) reminds us ofthe Larmor spin precession of an isolated electron (om/ot = -YeB x m). However, the precession ofJ.1 here is caused by an effective induction Beff which results from the combined action of the Maxwellian magnetic induction, the local magnetic induction, and the exchange forces via (fiji'
Conservation of Energy: Employing the equations obtained above and (3.10.3), the localization of
(9.3.5) yields - p(q; + (J1j + (11) + tjiVi,j + (fIji(iti),j - P LB' P.
+ V·q + f·1t + ph = 0 in"Y - (J (9.3.21)
and
[{!pv2 + p'li + P11(J + !(E2 + B2 - 2Jt· B)}{vj - v)
- (tji + tIf + VjGi)Vi - (fIjiiti - (qj - Yj)]nj = 0 on (J(t), (9.3.22)
where 'Ii = e - 11(J = /:: - B· J.1 - 11(J. (9.3.23)
According to the Legendre transformation (9.3.21h, e and 'Ii depend func tionally on the magnetization density. Consequently, by using (9.2.9), (9.3.1S), and (9.3.19), we have
(fIji,j{t; = - pB' P. - p LB· p.. Finally, we have from (9.3.6) the
Local Entropy Inequality:
p1j ~ (J-l ph + (J-l V . q + q' V G) in "Y - (J,
(9.3.24)
(9.3.25)
Together with Maxwell's equations, eqs. (9.3.7), (9.3.S), (9.3.9)-(9.3.11), (9.3.13), (9.3.14), (9.3.16), (9.3.17), (9.3.22), (9.3.24), and (9.3.25) form the complete set of local field equations, boundary conditions, jump conditions, and thermo dynamic constraints for the present theory. To close the theory, these must be supplemented with initial conditions and constitutive equations for the
452 9. Elastic Ferromagnets
dependent variables e, 1], t ji , LB, !?4ji , $, and q. The Clausius-Duhem (C-D) inequality is central to the development of the constitutive theory. Note finally, that the above-obtained equations are independent of the exact mechanical behavior which may be that of elastic bodies, fluids, or media with an inter mediary behavior.
C. The Clausius-Duhem (C-D) Inequality
Eliminating h between (9.3.21) and (9.3.25), we are led to the following Clausius-Duhem inequality:
~ . 1 - p('¥ + 1]8) + tjiVi•j - P LB' Ii + [!8ji(itJ,j + $ . iff + (j q . V8 ~ O. (9.3.27)
It is important to express this inequality in terms of objective time rates. To fulfill this requirement, we note that 11 is objective since it is the magnetization in the co-moving frame and we introduce the objective time rates
mi == iti - V[i.jJi1j = (DJIl)i'
@ij == (itJ. j - V[i.k]i1k,j = (DJ VIl)ij + i1i,k d kj'
(9.3.28)
(9.3.29)
where (VIl)ij = i1i,j and D J indicate the Jaumann derivative. The second part of (9.3.29) is readily checked from (1.12.6) and (1.9.7). Then, using (9.3.28), (9.3.29), (9.3.13), and (9.3.20), (9.3.27) takes the form 5
- p(4 + 1]0) + (Jjidij - P LB' ill + !?4ji@ij + $ . iff + 8-1 q . VB ~ 0, (9.3.30)
so that (9.3.31)
(9.3.32)
The last equation is none other than the canonical decomposition of the Cauchy stress in its symmetric and skew-symmetric parts. This decomposition is fundamental in that it shows that if the field LB possesses a thermo dynamically irreversible contribution (which will be shown to represent the so-called spin-lattice relaxation phenomenon), then this contribution partici pates in the Cauchy stress. As a consequence, it will follow that the damping of elastic waves can be partly due to spin-lattice relaxation.
Another comment is in order concerning (9.3.30) and the duality inherent in thermodynamics. If the field 11 is frozen in the deformable matter (i.e., if its precessional velocity n equals the vorticity w), then LB no longer contributes to (9.3.30). This fact upholds the interpretation already granted to LB. How ever, !?4ji is clearly associated with the gradient of 11.
5 The inequality (9.3.30) was first obtained by Maugin and Eringen [1972aJ and Maugin [1974aJ for insulators. Its extension to the case of electrically polarized conductors is due to Maugin and Collet [1974].
9.4. Constitutive Theory 453
D. Boundary Conditions
If (T is a material surface, v = v, then (9.3.10), (9.3.16), (9.3.22), and (9.3.26) reduce to
[tji + tj~ + vjG;]nj = 0,
[eipqJ.lpgHjq]nj = 0,
[0-1 qj] nj ::; O.
(9.3.33)
Letting (T coincide with o"f/ then reproduces the boundary conditions on o"f/. Now consider (9.3.14). Jt x 9(0) is a surface couple acting on the electronic
spin continuum. If angular momentum is conserved for the whole continuum on o"f/ - (T, then a surface couple 9(0) x Jt should be applied to the lattice continuum. But the latter is not supposed to be able to respond to such couples. Therefore, in general, for any J1 different from zero, we must have
9(0) = 0 on o"f/ - (T. (9.3.34)
If follows from (9.3.14) and (9.3.34) that the vectors of components J.li and nj86ji must be parallel on o"f/ - (T. Introducing a multiplier A. (an unknown to be found in the process of problem solving), the spin boundary condition takes the restricted form6
(9.3.35)
A. Saturated Ferromagnetic Elastic Insulators
Numerous ferromagnetic materials can be considered to be insulators. Here we consider the case of elastic ferromagnetic insulators that are magnetically saturated. Therefore, in addition to (9.2.10), we set
,$ =0.
FE = (VB)·M.
(9.4.1)
(9.4.2)
6 This boundary condition was established by one of the authors in the more general ferri~agnetic case (Maugin [1976c]). In cubic crystals where Blj; = all;,}, (9.3.35) takes the form e(8,,/8n) + " = 0 with 0 ~ e = a/).. ~ 00. This is the boundary condition obtained by Soohoo [1963] (see also Gurevich [1973, p. 140]). In rigid bodies only conditions of the type (9.3.35) can be imposed with, for instance, ).. = 0 -+ njBlj; = 0 or ).. = 00 -+ " = O. In deformable bodies Collet and Maugin [1975] have considered a finer mechanical description to obtain a broader class than (9.3.35) for the spin boundary conditions. Hyperstresses and double normal forces must be considered there along with the usual stresses.
454 9. Elastic Ferromagnets
Fundamental to the development of the constitutive equations is the second law of thermodynamics (9.3.27) which reads
- p(qJ + ;,8) + tjiVi,j - P LB' it + ~ji(itJj + 8-1 q . V8 2: O. (9.4.3)
In accordance with the axioms of constitutive theory enunciated in Chapter 5, we assume that the dependent constitutive variables
are functions of the set of independent variables
{Xi,K' l1i, l1i,K, 8,K' 8}.
(9.4.4)
(9.4.5)
More convenient is a set of equivalent objective variables that can be con structed from (9.4.5), namely,
(9.4.6)
However, for magnetically saturated insulators, a more useful set is
(9.4.7)
where 8,K = 8,iX i,K,
(9.4.8) .ffKL = l1i,Kl1i,L = .ffLK ·
This contains three members less than those contained in (9.4.6), since the number of independent components of mKL is nine, while that of .ff KL is six. We have four constraints (9.2.2) and (9.2.6) restricting 11 and 11;,K' Therefore, if we use (9.4.7), the three constraints (9.2.6) can be disregarded and we will be left with a single constraint, (9.2.2), or equivalently,
(9.4.9) -1
where C KL is the Piola strain measure defined by (1.4.11). Hence we set -1
qJ = 'P(EK£> mK, .ffKL , 8. K, 8) - gli( CKLmKmL - 11;) (9.4.10)
where gli is the Lagrange multiplier. Employing (1.9.11), we compute the following time rates:
EKL = d· ·x· KX, L lJ l, ).'
rYtK = (itj + l1i Vi,j)xj ,K,
AKL = 2(itJ,jXj ,Kl1i,K'
(9.4.11 )
+ (tii - P :: J.liXj,K) Wij + ~q. V() ~ 0, (9.4.12)
where we used vi,i = dij + wij' We note that th<? coefficient of the Lagrange multiplier & in (9.4.10) does not contribute to 'P. The inequality is linear in the quantities 0, O,K' dij, {Ii' and ({Ii),j which can be varied independently and arbitrarily. Moreover, wij = -Wji' Consequently,
Theorem. Constitutive equations of saturated ferromagnetic elastic insulators are thermodynamically admissible if and only if
8'1' 8'1' 1] = -aij' 8() = 0,
,K
8'1' t·· = p--X· KX, L - P LB.J.l. J' 8EKL " J, J "
0'1' LB.= --X' K
J' 8..HKL J, ','
tUiJ = - P LBuJ.lil'
In view of(9.4.13), 'I' is independent of (),K so that
'P = 'I'(EKL' mK, ..H KL, ().
(9.4.13)
(9.4.14)
(9.4.15)
(9.4.16)
(9.4.17)
(9.4.18)
(9.4.19)
From (9.4.18) and the continuity of q with respect to V() it follows that
q = 0 when V() = O. (9.4.20)
The constitutive equation for q is of the form
(9.4.21)
subject to (9.4.18) and (9.4.20). For. some purposes it is useful to express the stress tensor in the forms
of which the second follows from the definition (9.3.31) and
0'1' Etji = P OEKL Xj,LXi,K = Etij (9.4.23)
456 9. Elastic Ferromagnets
is the elastic part of the stress tensor. Note, however, that Et not only contains elastic effects, but also effects such as magneto stricti on, piezomagnetism, and exchange-strictive effects.
We also note that the saturation condition (9.3.20) is satisfied automati cally, since from the symmetry of A KL and (9.4.16) it follows that
o\{l BUk[iflJl.k = 2p~ fl[i.KflJl.L == O.
U~tKL (9.4.24)
Finally, since mK essentially represents the components of the magnetiza tion in the initial configuration, the local magnetic field LB is the field which accounts for the dependence of the energy of the ferromagnet upon the direction of the magnetization. In accordance with the discussion presented in Section 4.5, LB can also be referred to as the magnetic anisotropy field or magnetocrystalline magnetic field.
The free energy function \{I is further restricted by the material and mag netic symmetry regulations. To this end, we employ representation theorems as discussed in Appendix C (Vol. I). However, to exhibit various physical phenomena, we resort to a quadratic expansion of the free energy which is valid for the low-energy levels. 7
B. Free Energy
Let To > 0 be the uniform temperature field and Po the mass density in the reference configuration
(9.4.25)
A polynomial approximation for the free energy, irrespective of any material symmetry, is of the form
Po q.; = LEI + LEx + La + Lpyro + LPiezo + LMs + L ES + higher-order terms, (9.4.26)
where
LEI = 0'0 - Porto T - (Po'Y/2To)T2 + (AKL - BKL T)EKL + ~LKLMNEKLEMN (Thermoelastic energy),
LEx = !aKLAKL + !AKLMNAKLAMN + fKLMmKALM (Exchange energy),
(Magneto-crystalline energy), (9.4.27)
(Pyromagnetic energy),
(Piezomagnetic energy),
7 Reduced forms of constitutive equations for hemitropy were given by Maugin and Eringen [1972b] and Maugin [1976a].
9.4. Constitutive Theory 457
I:MS = !AKLMNEKLmMmN (Magneto-Strictive energy),
I:ES = 'YKLMNEKLJ( MN (Exchange-Strictive energy).
The symmetry regulations of various tensorial moduli (which depend on To and Po) are deduced easily from the symmetry of E KL , J(KL' and the expressions in (9.4.27). (10 is a constant which can be discarded without loss of generality.
Several special cases are of importance:
(a) For centrosymmetric materials there exist no material tensors of odd rank, so that fKLM' NK , and EKLM are nil. Discarding the effect represented by NKL which is of second order in J1.i,K-see (9.4.8)-we see that the phenomena of pyromagnetism and piezomagnetism do not show up In centro symmetric materials.
(b) If we consider isothermal processes, aT/at = 0 and VT = 0, then all terms containing T in factor can be discarded.
(c) The term linear in EKL in the thermoelastic energy can be shown to yield, in the linearized theory, a homogeneous state of stresses (see Section 5.11), which can be formally removed from the formulation by considering that it defines a new reference configuration.
(d) The term AKLMNJ( KLJ( MN is of fourth order in J1.i,K and can be neglected, compared with the term aKLJ( KL, in most cases where the spatial non uniformities in the spin field are small.
Thus, for a noncentrosymmetric material in isothermal situations and in the absence of homogeneous stresses, we can consider the following simplified expression for the free energy:
Po 'I' = !I:KLMNEKLEMN + !AKLMNEKLmMmN
+ EKLMmKELM + h~LmKmL + !aKLJ( KL + 'YKLMNEKLJ( MN' (9.4.28)
This expression still contains contributions of elastic, magnetostrictive, piezo magnetic, magnetocrystalline, exchange, and exchange-strictive origins. We have gathered the last two contributions into a single expression for the following reason: these effects arise simultaneously when we approximate (by a continuous expression) the microscopic exchange energy in solid materials subject to large elastic deformations.
(e) As far as magnetomechanical effects are concerned, magnetostriction is of second order in p (or mK ), whereas piezomagnetism is of first order. For sufficiently small p, the first effect may be neglected compared with the second. The remaining piezomagnetic effect is sufficient to produce the coupling of phonons and magnons (see Section 9.6). Similarly, the exchange-strictive effect is of second order in J1.i,j and can be neglected for small spatial nonuniformities of p. In these conditions (9.4.28) reduces to
458 9. Elastic Ferromagnets
the simple expression
Po'¥ = 1L.KLMNEKLEMN + h~LmKmL + 1 a KL A KL + EKLMmKELM' (9.4.29)
This expression may be thought of as an expansion in E KL and jl KL followed by an expansion of the tensorial coefficients in terms ofmK • Finally, only terms of second order at most are kept, so that along with the magnetocrystalline term only the piezomagnetic term appears as a new term during the process. Constitutive equations (9.4.14)-(9.4.16) read
(9.4.31)
(9.4.32)
C. Correspondence Between the Microscopic Model and the Continuous RepresentationS
Here we consider elastic ferromagnets subject to large deformations, and try to find an expression for the exchange energy in terms of its microscopic representation given in Chapter 4. To that end, consider Heisenberg's expres sion (4.5.7). The exchange integral J is a function of the distance r(ap) between the atoms IY. and [3. Now assume that the angle cpaP between sa and sP is very small, so that, with ISal = ISPI == s,
where n" is the unit vector along S", i.e., along the associated magnetic moment. Then (4.5.7) yields
(9.4.34)
Suppose that, at fixed time, n" can be represented by a continuous function n(X) of the position in the reference configuration K, i.e., in the undeformed lattice. Then, to a sufficient approximation,
nP - n" = n,K(XK - Xa
where XK are the coordinates of the atom IY. in K. Equivalently, using the director cosines d", we can write
(9.4.35)
9.4. Constitutive Theory 459
For the sake of simplicity consider the origin of coordinates at the undeformed site IX. Then XK = O. Substituting from (9.4.35) into (9.4.34) we obtain
(9.4.36)
We then sum this expression over nearest neighbors /3, multiply the whole expression by ! to avoid counting each term twice, and multiply by the number of atoms no per unit of undeformal volume. The first contribution in (9.4.36) can only depend on d and EKL through J(r(aP»). Therefore it can be absorbed in other contributions to the whole free energy that also contain E KL and d. Hence, the contribution of microscopic exchange forces to the phenomenological (free) exchange energy in the undeformed state is obtained by summing only over the second contribution of (9.4.36). That is,
pot/lex = ! noS2 L J(r(aP»)x~Xfdi,Kdi,L' (9.4.37) P
The estimation of this expression is as follows: Let R be the distance between an atom and its nearest neighbors in the configuration K. Since Rand r(ap) are obviously very small on the continuum scale, to a sufficient approximation we can write [see (1.4.2hJ
r(aP)2 = x\aP)x\aP) = cKLx~xf
= R2 + 2EKLX~xf, (9.4.38)
since R = «(jKLX~Xf)1/2. Set rl == XVR, the director cosines of the line that join the sites IX and /3 in K, then (9.4.38) reads
r(ap)2 = R2(1 + 2EKLrlrf),
so that, to the first order in EKL, we have
r(ap) = R(1 + EKLrlrf). (9.4.39)
J(r(aP») can be evaluated by considering its expansion in function of the small distance variation, i.e.,
J(r(aP») ::::::: J(R) + J'(R)(r(aP) - R),
J(r(aP») = J(R) + J'(R)REKLrlrl. (9.4.40)
aKL == n~ S2 R2 J(R) L rlrl, fl. P
YKLMN == 2no2 S2 R3 J'(R) L rlrlrftrA, fl. P
(9.4.41)
460 9. Elastic Ferromagnets
Taking into account (9.4.27h, we can rewrite (9.4.37) in the form
porjJex = }aKLAKL + 'YKLMNEKLAMN. (9.4.42)
This is nothing other than the last contribution in (9.4.28). The phenomeno logical tensorial coefficients are related to microscopic parameters through equations (9.4.38). a KL is obviously symmetric, but (9.4.38) tells us that YKLMN
is also a completely symmetric tensor.9 We see that a continuous approxima tion of the Heisenberg exchange energy here yields both pure exchange and exchange-strictive contributions to the whole free energy. Strictly considered as a formula issueing from microscopic considerations, (9.4.42) is valid only at e = O. However, it may be reinterpreted as a formula valid at an arbi trary temperature (of course, such that e « eJ, by assuming that the material coefficients a KL and YKLMN are temperature dependent.
D. Infinitesimal Strains
In the case of infinitesimal strains we no longer need to distinguish between lowercase and capital Latin indices. For instance, considering (1.6.7), (1.6.8), and (9.4.8), and neglecting exchange-strictive effects, we have
~ _ HI 1 - - + 1 M + - + 1 1 - + 1 £.. = Po T = Z(Jijkleijekl zXij Ilillj eijklliejk zAijkleijllkll1 zaijllk,illk,j'
(9.4.43)
This expression is valid for noncentrosymmetric linear elastic bodies, when there are no initial stresses, and for isothermal situations. To the same degree of approximation, the constitutive equations (9.4.14)-(9.4.16) yield, with p ~ Po,
(9.4.44)
(9.4.45)
(9.4.46)
and
9 There are other cases in physics where a microscopic approach yields a stronger symmetry than the corresponding macroscopic one. This results from the fact that certain special forms of interactions and potentials must necessarily be introduced in a microscopic theory to make it tractable (e.g., central forces, two-body interactions). This happens in the determination of elastic moduli from lattice theory where the so-called Cauchy relation results between the elastic moduli of cubic crystals (see Musgrave [1970, p. 234]).
9.4. Constitutive Theory 461
This last expression shows that the magnetocrystalline effect can contribute to the Cauchy stress at the second order in J.1 in the same way as the magneto striction. This follows from the decomposition of (9.4.22). The relative impor tance of the two effects depends on the strength of the fields. 10 In a fully linear theory we keep only the quadratic terms jointly in eij and fli in the expression (9.4.44). This amounts to setting A ijkl = 0.
The coupling between stresses and the magnetic anisotropy field-or lattice and spin continua-subsists only in the form of the piezomagnetic effect. The local balance law of the moment of momentum is no longer satisfied, for tji is now symmetric. The simplified theory obtained is thus similar to Voigt's theory of piezoelectricity discussed in Chapter 7. Finally, by virtue of Euler's identity for quadratic forms, L can be rewritten in the form
(9.4.48)
which proves useful in studying theorems of existence and uniqueness for this simplified theory.
Returning to the more general case (9.4.43) we note that, with the help of representation theorems,11 expressions for the various tensorial material coefficients for many of the crystallographic classes and magnetic groups, referred to in Chapter 5, can be obtained. However, numerous ferromagnetic materials are either centrosymmetric cubic or unixial (i.e., transversely isto ropic). Consequently, we focus our attention on these two classes.
E. Centrosymmetric Cubic Crystals
Iron and nickel, and some of their compounds such as yttrium-iron-garnet (Y.I.G.), are ferromagnetic materials with a cubic structure. Iron garnets are typical elastic ferro magnets of which the general formula is M 3 Fe1S 0 12 ,
where M is a trivalent magnetic ion and Fe appears in its trivalent form Fe3+ . Y.I.G. is the best known iron garnet with the formula Y3 Fes0 12 where the ion y3+ is diamagnetic.
As an example, we consider a cubic crystal of the magnetic class 1Jl31Jl (which belongs to the subgroup m3 ), the generators of which have been given in Appendix B (Vol. I). This material is centrosymmetric. The tensorial coefficients appearing in (9.4.43) have the representations
(Jijkl = C(jijkl + c 12 (jij(jkl + C44 (Oik Oji + 0UOjk)'
eijk = 0, (9.4.49)
A ijkl = AOijkl + A 12 (jij Okl + A44 (Oik Oji + OUOjk),
where the symbol Oijkl has components equal to one when all indices are alike and zero otherwise. The second equation of (9.4.49) tells us that the magnetic
10 See Maugin and Eringen [1972b] and Maugin [1976a, pp. 299-300]. 11 See Sirotin [1960], [1961], Mason [1966], and Appendices Band E (Vol. I).
462 9. Elastic Ferromagnets
anisotropy will not have any effect on the spin precession if it is only of second order in p. Therefore, we must consider the next contribution, which will be of fourth order in p, in the expression (9.4.43). This contribution reads
with bijkl = Mijkl + b12 (c5ijc5kl + c5ik c5jl + c5jkc5i/)'
Setting Kl == -bj2,
(9.4.50)
(9.4.51)
(9.4.52)
introducing the Cartesian system (x, y, z) of coordinates, discarding terms which contain only Jl == Ipl and using (9.4.48), a short computation leads to the following expression for L: '
L = tCll (e~x + e;y + e;z) + c12(exXeyy + eyyeZZ + ezzexx)
+ tC44(e~y + e;z + e;J + taJli,jJli,j
+ (A44 + Aj2)(exxJl~ + eyyJl; + ezzJl;)
+ K 1 (Jl~ Jl; + Jl; Jl; + Jl; Jl~), (9.4.53)
in which there appear seven material constants, Cll' C12 , C44' A, A44' a, and K l' The fact that there are two magnetostriction constants in cubic crystals was recognized by Akulov (1936). For the purpose of illustration, typical values of these constants are given in Table 9.4.1 for y'I.G. It must be remarked that the deviation from elastic isotropy, which may be measured by the parameter
Table 9.4.1. Room temperature constants ofY.I.G. (after Strauss [1968] from different sources).
Constant Symbol Value
C12 10.77 X 1011 dyn x cm-2
C44 7.64 x 1011 dyn x cm-2
Density P 5.17 gr x cm- 3
Gyromagnetic ratio l' 1.76 x 107 (Oersted x secr1
Saturation moment 4nMs = 4npJls 1750 Oersted Reduced exchange
~ == 2aJls 5.2 x 10-9 Oersted x cm2 constant
K' Anisotropy constant -2_1Jl3K -45 Oersted M -2 s 1
s Magnetoelastic AJl; 3.48 x 106 erg x cm- 3
constants 2A44Jl; 6.96 x 106 erg x cm-3
(9.4.54)
9.4. Constitutive Theory 463
is weak, for ~ ~ 0.06 for the values given in Table 9.4.1.12 This means that Y.I.G. is elastically isotropic for all practical purposes. It must be remarked that for certain materials such as iron, it may be necessary to include terms of the sixth order in Ji in the anisotropy energy. The additional term then has the form K zJ1;J1;J1;.
F. Uniaxial Crystals
Uniaxial crystals are crystals, such as hexagonal cobalt, which exhibit a preferred direction in their magnetic properties. The representation of the elastic, piezomagnetic, and magnetostrictive energies corresponding to this symmetry are to be found elsewhere. 13 If di is a unit vector pointing in the preferred direction, we only recall that, due to the symmetry of eijk in its indices j and k, the piezomagnetic tensor has the following useful representation for uniaxial symmetry:
(9.4.55)
where e1 , ez, and e3 are piezomagnetic constants. This follows directly from the application of a single representation theorem (already used in Chapter 4) to describe optically uniaxial crystals. Similarly, the tensorial coefficients bij and aij of (9.4.55) admit the representations
bij = XMbij - X~didj'
aij = abij + aZdidj , (9.4.56)
where XM and X~ are magnetic anisotropy constants and a and a2 are exchange constants (dependent on () for nonisothermal regimes). Discarding contri butions which contain only IJiI, the expressions (9.4.56) yield the contributions
La = -h~(Ji' d)2, (9.4.57)
and
1 1 (aJi)2 Lex = zaJi.i· Ji,i + za2 ad ' (9.4,58)
where a/ad == d· V in (9.4.58). Upon examining the expression (9.4.57) we see that, if x~ < 0, L2 reaches
its minimum when Ji and d are orthogonal. For instance, if d is along the x3-axis, at equilibrium Jilies in the (Xl' x2 )-plane. If X~ > 0, then La reaches its minimum when Ji and d are aligned. Crystals in which X~ < 0 are called crystals of the easy-plane type. Crystals in which X~ > 0 are called crystals of the easy-axis type. In hexagonal cobalt (in which the preferred direction d is the hexagonal axis), X~ > 0 below approximately 200 DC and X~ < 0 above
12 Clark and Strakna [1960]. 13 For example, in Maugin and Eringen [1972b, Sect. 9].
464 9. Elastic Ferromagnets
that temperature. At room temperature X"tjp5 ~ 4.1. However, it must be noted that the series expansion of ~a in p converges slowly and that in many cases terms of high order (such as the fourth order) must also be included. In fact, since (p' d)2 = p2 - (p X d)2 and terms in p2 can be discarded, (9.4.57) can be rewritten as ~a = K' sin2 <p, where <p denotes the angle between p and d and K' = xrp2j2. An expansion, up to fourth-order terms in p, yields
~a = K~ sin2 <p + K~ sin4 <po (9.4.59)
In hexagonal cobalt at room temperature, K'l = 4.1 X 106 erg x cm - 3 and K~ = 1.0 X 106 erg x cm-3•
As for the expression (9.4.58), the deviation from isotropy or cubic sym metry is usually weak and the second contribution involving a2 may ,often be discarded.
G. Elementary Dissipative Processes
An inspection of the C-D inequality (9.3.30), and the duality inherent in continuum theromodynamics, indicates that in a sufficiently general case we may have thermodynamically irreversible processes associated with uji
(viscosity), LB (dissipative contribution to the anisotropy field due to the fact that p is not frozen in the material; lit =F 0), flJj ! (dissipative contribution associated with spin-spin interactions according to the significance granted to flJji ), f (electrical conduction), and q (heat conduction). We shall examine only linear irreversible processes and, in fact, discard the last two effects as well as the dissipative part for flJji for which the evidence is weak. We index the thermodynamically recoverable parts introduced previously by a left superscript R, and the new irreversible contributions by a left superscript D. In particular,
(9.4.60)
(9.4.61)
By virtue of (9.3.32), and considering the elastic case for the parts indexed R,
tji = Rtji + Dtji ,
The D parts satisfy the remaining dissipation inequality (for non-heat conducting insulators)
py == DUji dij - p rB·1it ~ 0 (9.4.65)
if the R parts have been derived from the potential 'P. For the linear anisotropic insulators, constitutive equations for DO" and rB read
DUji = '1jikl d kl + '1jik 1Ylk'
'iBi = Lijkdjk + Lij1Ylj'
9.4. Constitutive Theory 465
subject to the restrictions of the entropy inequality (9.4.65). In the case of isotropic insulators Da and ~B are uncoupled
DUji = Avdkkbji + 2Jlvdji>
?Bi = - prrYti'
where viscosities Av, Jlv, and the relaxation constant r are subject to
Jlv ~ 0, r ~O.
Introducing the relaxation term R and the viscous force FV by
R = yp x ~B = -pyrp x rit,
FV = div Da,
and noting that
we can rewrite the Euler-Cauchy equation (9.3.9) and the spin-precession equation (9.3.17) in the form
where
Ii = yp x RHeff + R,
RHeff_H +RB + -1"" i - i LiP ~ji,j'
(9.4.73)
(9.4.74)
(9.4.75)
H replaces B in the last expression without loss of generality and, con sequently, the resulting combined field is renamed the effective magnetic field. The relaxation R, which results from spin-lattice interactions according to the significance granted to LB, is shown to participate in the Euler-Cauchy equations of motion.
Note that no hypothesis has been made concerning the magnitude of r. The expression (9.4.69), which serves to describe the relaxation of the spin density toward its equilibrium position (see Figure 9.4.1), and the subsequent equation (9.4.74) are valid for relatively strong damping of the spin precession. However, if r is small and considered as an infinitesimally small quantity of the first order, then the term R in (9.4.74) may be considered as a perturbation. Then Ii can be evaluated from the spin equation (9.4.74) in the absence of R. Carrying out this perturbation procedure yields, in lieu of (9.4.74),
(9.4.76)
where
it = __ 1 p x [p x (RHeff + ~)J. 2r'p2 y
(9.4.77)
Here we took into account the definition of rit, and introduced the vorticity vector wand the new relaxation time
(9.4.78)
Figure 9.4.1. Relaxation ofthe magnetic spin.
To the same degree of approximation, R can be replaced by R in (9.4.73). It must be understood that (9.4.76) and the corresponding Euler-Cauchy equa tion must be used only for sufficiently large relaxation times 1:'. Thus, only for slight deviations from the adiabatic processes, R is the objective relaxation term which generalizes, to the case of deformable bodies, the term deduced from a Rayleigh dissipation function (by Gilbert [1955J) for rigid bodies. R is the relaxation term which generalizes to deformable bodies, the term intro duced heuristically in rigid bodies by Landau and Liftshitz in their pioneering work [1935].14
H. Small Fields Superposed on a Constant Bias Magnetic Field
In many applications, materials are acted upon by a constant magnetic field Ho and magnetization Po- The solid is then subjected to nonuniform small displacement u and fields ji. In this case, constitutive equations can be
14 In rigid bodies the experimental evidence for a Landau-Lifshitz damping of the spin was given by Robdell [1964]. The superiority of Gilbert's term for strong damping is'shown in Kambersky and Patton [1975] (see also Anderson [1968, p. 180]). Akhiezer et al. [1968] deduced (9.4.77) on an unsound thermodynamical basis. The present thermodynamical derivation of both (9.4.71) and (9.4.77), and the establishment of the restricted conditions involving (9.4.77), are due to Maugin [1975]. Previous attempts along the same lines in elastic ferromagnets are due to Alblas [1968] and Maugin [1972a]. The antiferromagnetic and ferrimagnetic cases are established in Maugin [1976c]. Numerical values of 1: can be found in Gilbert [1956].
9.4. Constitutive Theory 467
H = Ho + h,
fl = flo + p,
(9.4.79)
and dropping products of h, p, 15, eij' and their rates and gradients. The underlying assumption is that
Ihl« IHol,
Ipi « Iflol.
to replace flo.
(9.4.80)
(9.4.81)
The linearization is to be performed on the initial state (Po, flo, Ho) where the body carries no initial stress or internal field LBi • Consequently, from the expression of m K , we drop a constant term m~ = J1.0 dj <>jK which causes stress at the initial state. With this, the linearization gives
m K ~ mAk = (lii + J1.0 d i Ui)<>jK,
vi{ KL = iii,kiii,l<>kK<>'L'
~tji = UijklUk,1 + ekijiik + ekijJ1.od p u p ,k,
~Bi = - POl [ei/mU"m + x~'(lii + J1.0d kUk)J,
!!4ji = ajliii,I'
~ = Po'P = tUijkleijekl + tAijkleijmkm, + eijkmiejk + tx~mimj + taijvl{ij + Yijkleijvl{kl,
where the spatial moduli Uijkl, ••• , Yijkl are related to their material counter parts, expressed in the material frame X K by
(Uijkl, Aijkl, Yijkl) = (~KLMN' AKLMN , rKLMN)<>iK<>jL<>kM<>,N'
e ijk = EKLM<>iK<>jL<>kM'
x~ = X~L<>iK<>jL'
(9.4.83)
The constitutive equations read
468 9. Elastic Ferromagnets
!J6ji = a 1Jii,j'
L = (!O"ijkl + 1l0 diejkl + !1l6diXj~ddUi,jUk" + (eijk + 1l0Xitdj)JiiVj,k
+ 1 M- - 1 - - -rXij Ilillj + -ra l Ili.klli,b
where the material moduli O"ijkl' ... , Yklmn are functions of To, Po and d.
(9.4.85)
(9.4.86)
(9.4.87)
We consider the special case of induced anisotropy due to the orientation d of the magnetic field. The material moduli are assumed to be isotropic functions of d. By means of the tables given in Appendix E (Vol. I) we can construct these functions
X~ = Xl (jij + X2 dA, aij = a 1 (jij + a2dA,
eijk = e11l0 di(jjk + e21l0(dAk + dk(jij) + e31l'fAdjdk,
O"ijkl = O"O(jij(jkl + 0"1 ((jik(jjk + (ji/(jjk) + 0"2(dkd,(jij + dA(jkl) (9.4.88)
+ 0"3(didk(jjl + did,(jkj + djdk(ji/ + djdl(jik) + 0"4 didikd"
where Xa' ea, and O"a are functions of To, Po, and 110' Here Xl and X2 are the magnetic anisotropy constants, ea are the piezomagnetic constants, O"a are the elastic constants, and aa are the exchange constants of which we set a2 = 0 and, as discussed before, we neglect higher-order terms represented by Aijkl and Yijkl' Then dissipative parts of the constitutive equations (9.4.63) and (9.4.64) retain their forms with dkl and mk, having the linear forms
1 [(aUk) (aul) ] dkl = "2 at ,I + at ,k ; 1 [(aUk) (aul) ]
Wkl = "2 at ,I - at ,k ' (9.4.89)
The dissipation moduli '1ijkl, ... , 'ij have the same general forms as in (9.4.88) under the assumption of Onsager reciprocity. However, the effect of uniaxial anisotropy on these moduli are generally small, so that expressions (9.4.66) and (9.4.67) are used in practical applications.
For some purposes, it is convenient to express the constitutive equations (9.4.84)-(9.4.86), for the uniaxial case, in the form
where
~Bi = - POl (X 1 Jii + X2 did' Ji + bijkUj.k)'
!J6ji = aJii,j'
cij = 1l0el (jij + 1l0(X2 + 1l6 e3)didj,
(9.4.90)
(9.4.91)
(9.4.92)
b;jk = Jio[eld;bjk + (el + Xl)dAk + eldkbij + (Ji6 e3 + Xl)dAdkJ,
O';jk/ = (J;jk/ + Ji6[e l (dAbk/ + dkd/bij) + el(d;dkbj/ + d;d/bjk + djd/b;k + djdkb/i)
+ (Xl + 2Ji6 e3)d;diA· (9.4.93)
The linearization process applied to the balance laws results in
op ou at + poV' at = 0,
( r OlU;) E tj;,j + Po J; - otl + F; = 0,
- oJ! Y" d x Beff - - = 0
/"'0 ot'
V x h = O.
P = - POuk,k; P = Po(1 - uk,d·
For the magnetization, we have
M = PJ! = Mod(l - ekk ) + PoJ!,
B = H + PoJ! = Ho + Mod + h - Moekkd + PoJ!,
(9.4.94)
(9.4.95)
(9.4.96)
(9.4.97)
(9.4.98)
(9.4.99)
(9.4.100)
where Mo = PoJio. Consequently, the magnetic forces FE and B~ff are given by
(9.4.101)
B~ff = h; + Mo(1 - ur,r)d; - Po (Z: bij + pi/xt! ))Ij + polal Vl)I;
- POl (eijk + JioX~dj)Uj,k' (9.4.102)
For the uniaxial anisotropy induced by the initial field d, (9.4.102) takes the form
Btff = h; + Mod; + - POl [(pJ Z: + Xl) bij + Xld;dj] ~ + polaVl)I;
- PolJiO[(e l + pJ)d;b;k + (e 2 + XddAk + e2 dkbij
(9.4.103)
9.5. Resume of Basic Equations
The theory of ferromagnetic insulators is based on the following equations.
Maxwell's Equations (in 1'") For the treatment of the interactions oflong-wave magnons and phonons,
only quasi-magnetostatic equations are kept.
470 9. Elastic Ferromagnets
v x H = 0,
tji,j + p(J; - 1\) + FiE = 0,
Boundary Conditions (across or) n x [H] = 0,
n' [B] = 0,
njPAji + AJl.i, = 0,
Constitutive Equations (nonlinear)
Ii = Yfl x Beff•
R P o~ t·· = ---x· KX, L - P LB.Jl.· J' Po oEKL ',J, J "
P o~ PAji = 2- :'l ~~ Xj,KJl.i,L'
Po Uv'nKL
Po 'I' = ~ = tUijkleijekl + h~Jl.iJl.j + eijkJl.iejk + taijJl.k,iJl.k,j'
R -Etji = Uijklekl + ekijJl.k,
Dissipative parts of the constitutive equations are
Dtji = l1jikldkl + l1jikmk'
PBi = 'rijkdjk + 'rimj.
Definitions
Rtj; = Etj; - P ~BjJ1.;, D D DR __ tj; = CTj; - P L~UJ1.;I'
CTj; = tu;) = CTij = RCTj; + DCTj;'
FE = (VB)' M = (VH)' M + tVM2,
M = Pfl,
H=Ho+h,
fl = J1.oil + p, P = Po(l - ekk),
Mo = PoJ1.o, d = flo/J1.o, J1.0 == 1J1.01,
where BO = Ho + Mod satisfies
d x Bo = O.
a- -.l!: = "" d x Beff at 11"'0 ,
V . (h + PoP - ModUk,k) = 0,
V x h = O.
FE = Mo(Vh)·d - M5Vur,r + PoMo(Vp)·d,
Biff = h; + Mod; - POl [ (P5 ~: + Xl) <>;j + X2d;dj] Jlj + polaV2Jl;
- polJ1.o[(e l + P5)d;Ojk + (e2 + xddAk + e2 dA j
+ (X2 + e3J1.~)d;djdk]Uj,k> \; = [aijkl + J1.~(e2 + Xdd;dk<>jl - J1.~e2dA<>;k]Uk,1
+ J1.0[(e2 + Xdd;<>jk + e2dAk]Jlk
+ J1.o[el <>ij + (X2 + J1.~e3)d;dj]d· p,
(9.5.22)
(9.5.23)
(9.5.24)
(9.5.25)
(9.5.26)
(9.5.27)
(9.5.28)
(9.5.29)
(9.5.30)
(9.5.31)
fIlji = aJii,j'
where iiijkl is given by (9.4.93)5' For the free energy, see (9.4.87).
9.6. Coupled Magnetoelastic Waves in Ferromagnets
A. Preliminary Remarks
(9.5.32)
(9.5.33)
In the study of spin waves in rigid ferromagnets the coupling between the spins and the motion of ions in the crystal lattice is discarded. However; in real systems, this coupling, in spite of its weakness, is present and it gives rise to displacements and oscillations in spin. More precisely, this results in the propagation of coupled magnetoelastic waves rather than purely magnetic (spin) waves or purely elastic waves in magnetically ordered crystals. Ac cording to the terminology introduced in Chapter 4, we must then account for the magnon-phonon interactions. Pioneering work in this field of research is due to Kittel [1958a, b] and Akhiezer et al. [1958],15 Since that time many physicists, electronic engineers, and theorists of the continuum have focused their attention on this problem because of its physical implications and potential engineering applications.
In practice, the coupling between magnons and phonons is quite weak, but it is especially important under certain definite resonance condictions. When these conditions are not fulfilled, magnons and phonons can be separated and regarded as independent to a high degree of accuracy. Nevertheless, they do interact with each other. The importance of this interaction is judged from the following argument. From dimensional analysis we can form the following coupling parameter
(9.6.1)
where j, Mo, Po, and CT are, respectively, a typical piezomagnetic constant, a typical saturation moment, the matter density, and a typical elastic-wave velocity. The order of magnitudes of these quantities are
j ~ 3-10, Mo ~ 1,000 Gauss,
Po ~ 10 gr/cm3, cT ~ 3 X 105 cm/sec.
15 The work of Akhiezer and his coworkers is synthesized in the monograph by Akhiezer et al. [1968]. Other prominent contributors in this field are, among others, Comstock [1964], [1965], Eshback [1963], Kaliski [1969a, b], Matthews and Lecraw [1962], Motogi [1979], Morgenthaler [1966], [1968a, b], Rezende and Morgenthaler [1969], Schlomann [1960], [1961], [1964], Strauss [1965], [1968], and Tiersten [1965b]. The treatment presented in this section is based in part on Maugin [1979a, b] and Maugin and Pouget [1981]. Other recent work is found in Alblas [1974] and Van de Ven [1975].
9.6. Coupled Magnetoe1astic Waves in Ferromagnets 473
Then' ~ 10-5-10-4, which shows the extreme weakness of the coupling. The conditions of resonance, whose numerical values indicate the regime for which the interaction is of practical interest, can be estimated in a simple fashion as follows: Let ws(k) and wp(k) be typical wave-number dependences of the frequency for pure magnons and pure phonons, respectively. We consider the excitation of magnons by phonons or vice versa. At resonance, ws(k) = wp(k) and the amplitude of magnons excited by phonons will be particularly large. This condition defines specific values ko of the wave number which, in turn, allows us to compute the corresponding values of w. The same reasoning holds true for phonons excited by magnons, so that we can speak of a definite resonance that may be referred to as the magnetoelastic (or magnetoacoustic) resonance. A typical dispersion relation for pure magnons, in the absence of an externally applied field, is given by16
(9.6.2)
where (J( and P are reduced exchange and magnetic anistropy constants. For pure transverse elastic waves in linear elasticity, we have the linear dispersion curve
(9.6.3)
Equating (9.6.2) and (9.6.3) we obtain the resonance condition which provides the roots of ko
kOl = ~ ± [~(~)2 _ fiJ1 /2. 2 2(J(wM 4 (J(WM (J(
(9.6.4)
In ad hoc units, the following approximation can be introduced from micro physical arguments:
(9.6.5)
where eo is Debye's temperature17 and v. (~ O.lc) is the order of magnitude of the velocity of electrons in the lattice. Considering (9.6.5), the approximate roots of (9.6.4) are kOl ~ PWM/CT and k02 ~ CT/(J(WM. Corresponding to these, we have the resonance frequencies in accordance with (9.6.3)
(9.6.6)
The first of these does not contain any acoustic parameter but contains the reduced anisotropy constant p. The second involves CT and the reduced exchange constant (J(. In ad hoc units, assuming that Mo ~ 1,000 Gauss, CT ~ 3 x 105 cm/sec, P ~ 1, (J( ~ 10-12 cm2, then
(9.6.7)
For Y.I.G., we get w~) ~ 1010 sec-1 (see Table 9.4.1). These numerical values
16 See Problem 9.10. 17 Debye's temperature is defined by eD = hwmax/ks where W max is the maximum circular frequency of the lattice vibrations (see Musgrave [1970, p. 231].
474 9. Elastic Ferromagnets
show that the frequencies of magnetoelastic resonance lie in the high-frequency ultrasonic (hypersound) region. This fact is important for engineering applica tions. In particular, magnetoelastic resonance can be used in hypersound generators.
Of course, a situation similar to that described above will also prevail for all the branches of elastic oscillations. In the case of elastically anisotropic ferro magnets, separation between transverse and longitudinal oscillations is not, in general, meaningful. In general, the interactions between magnons and the branches of elastic oscillations will lead to a resonance excitation by magnons of all the elastic waves and vice versa. In particular, magnetoelastic resonance can occur through both transverse and longitudinal elastic waves.
In the sequel to this section the continuum theory, developed in previous sections, will be used to examine a particular case of magnetoelastic resonance in an infinite ferromagnet. Propagation of waves in an arbitrary direction, the damping of magnetoelastic waves, the magnetoelastic Faraday effect, and possible engineering applications will be discussed briefly.
B. Plane Harmonic Waves
A ferromagnet carrying a constant bias field is disturbed from its static equilibrium position. We wish to determine the frequency of oscillations.
Basic equations of perturbations are listed in (9.5.25)-(9.5.33) where we substitute
(9.6.8)
Here p:o, uo, and hO are constant vectors, k is the wave vector, and w is the circular frequency to be determined.
Substituting (9.6.8) into (9.5.29)-(9.5.33), and the result into field equations (9.5.25)-(9.5.28), we obtain the following expressions:
{[PoWZ + Il~ez(d· k)ZJOkl - akjlmkjkm -1l~kZ(ez + Xl)dkd1
+ Mlikkk1}uf + illo[(e l + pli)kk + (Xz + ll~e3)d·kdkJd·p: + illo(ez + Xl)dk(P:°·~) + illoez(k· d)j1f + iMo(d· hO)kk = 0, (9.6.9)
-iYIl~P01(ez + Xd(d·uO)d x k - iYIl~polez(d·k)d x UO
- YIlOPOl [akZ + (Xl + pli Ho/Mo)]d x p:o + iwp:o + Yllod x hO = 0, (9.6.10)
Mo(d·k)k·uo + iPok·p:o + ik·ho = 0, (9.6.11)
k x hO = O. (9.6.12)
Equation (9.6.12) shows that hO = exk where ex is independent of k. Since electrodynamic effects are not present in Maxwell's equations, we consider the important case ex = 0, i.e., hO = O. From (9.6.10) it is clear that
(9.6.13)
9.6. Coupled Magnetoelastic Waves in Ferromagnets 475
Employing this and (9.6.11), (9.6.9) and (9.6.10) may be reduced to
([Poco2 + ll~e2(d' k)2](jkl - Ukjlmkjkm - 1l~(e2 + Xl)
. [d' kdkk, + k2dkd,] + M5kkk,}U? + illoe2k' dJi~ = 0, (9.6.14)
- iYIl~Pol (e2 + Xd(d' uO)d x k - iYIl~pole2(d' k)d x UO
- Yllopol(aP + Xl + P5Ho/Mo)d x jio + icojio = O. (9.6.15)
These equations constitute a system of six equations for the six unknowns u~ and ji~. For the solution to exist the coefficient determinant must vanish. This leads to a polynomial equation for co whose roots give the dispersion relations co = co(k), expressing the frequency as a function of the wave vector. However, the analysis is rather involved. To simplify the matter, we consider the fol lowing working hypothesis: Following Fedorovl8 we consider that the ma terial with Uijkl elastic moduli is "weakly anisotropic". According to Fedorov's criterion, effective Lame's constants or, equivalently, effective velocities of longitudinal and transverse elastic waves, cL and cT , can be introduced to express Uijkl to a sufficient degree of approximation by
(9.6.16)
where
ci == ii/Po, (9.6.17)
where 1 and ii are effective Lame's constants, so that the right-hand side of (9.6.16) "differs the least" from the expression present in the right-hand side of (9.4.93).
Using (9.6.12) and (9.6.16) in (9.6.9) and (9.6.10), we obtain
[Poco2 + M5e2(d' k)2 - PociP]uO - Po(ci- ci - POl M5)(k' uO)k
- M5(e2 + Xl)[(d· k)k' UO + ko(d· uO)]d + illoe2(d' k)jio = 0, (9.6.18)
iYIl~Pol [(e2 + Xl)(d· uO)d x k + e2(d· k)d x UO]
+ Yllopo l (ak2 + Xl + P5Ho/Mo)d x jio - icojio = O. (9.6.19)
Below we will discuss several special cases.
(i) Longitudinal Waves For the longitudinal waves, k and UO are in the same direction. Without
loss of generality, we take this common direction to be along the z-axis. k cannot be parallel to d, since (9.6.11) and (9.6.13) give k· UO = O. From (9.6.18) and (9.6.11) it follows that
(9.6.20)
476 9. Elastic Ferromagnets
in which (9.6.22)
Consequently, longitudinal waves are uncoupled from other waves and they can propagate in a direction not parallel to the anisotropy axis. In general, M6;Poct « 1 so that the phase velocity is very nearly the same as cL . Neverthe less, a real change in the velocity of propagation oflongitudinal waves can be observed if a bias external field H~ is introduced (see Section 8.8).
(ii) Transverse Waves For the waves propagating in the direction of the anisotropy axis, k is
parallel to d. From (9.6.11) it follows that
or d·uo = 0. (9.6.23)
Without loss of generality we select the z-axis in the direction of d so that
jI~ = u~ = 0.
It is convenient to introduce the circular components of UO and Po by
U± = u~ ± iu~, Ji± = jI~ ± ijI~. With these (and since d = 1), (9.6.9) becomes
where
[w + ws(k)]Ji± = ±ikfwMJiou±,
(9.6.24)
(9.6.25)
(9.6.26)
(9.6.27)
(9.6.28)
(9.6.29)
From (9.6.26) with Ji± = 0, it is clear that W T is the transverse elastic wave frequency modified by the bias magnetic field (compare with Section 8.8). Similarly, for u± = 0, (9.6.27) shows that Ws is none other than the pure magnon frequency. The coupling of these waves is through f.
Now consider the case oftransverse magnetoelastic waves whose dispersion relation is given by the coupled equations (9.6.26) and (9.6.27). Upon elimi nating the amplitudes u± and jI± between these equations, we obtain the dispersion relations
D+(w, k) == [w 2 - wj.(k)] [w - ws(k)] - (wMwj.(k) = 0, (9.6.30)
D-(w, k) == [w 2 - wj.(k)] [w

![[electrodynamics]-griffiths ans](https://static.fdocuments.in/doc/165x107/55c57e93bb61ebbd5d8b46ae/electrodynamics-griffiths-ans.jpg)