
Effect of Shared-attention for Human- Robot Interaction Junji Yamato [email protected] NTT Communication...
26
Effect of Shared-attention for Human-Robot Interaction Junji Yamato [email protected] NTT Communication Science Labs., NTT Corp. Japan Kazuhiko Shinozawa, Futoshi Naya ATR Intelligent Robot and Communication Labs.
-
date post
21-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of Effect of Shared-attention for Human- Robot Interaction Junji Yamato [email protected] NTT Communication...
Effect of Shared-attention for Human-Robot Interaction
Junji Yamato
NTT Communication Science Labs., NTT Corp. Japan
Kazuhiko Shinozawa, Futoshi Naya
ATR Intelligent Robot and Communication Labs.

Aim
To build Social Robot/Agent
Sub goalTo establish
Evaluation methodsDesign guidelines
for communication of human-robot/agent

• To measure the influence of Agent/Robot on users
• Acceptance ratio of agent/robot recommendation
Method

Color name selection taskBlue or Green? Cobalt green or emerald green?Skin color or KARE-IRO?SUMIRE-IRO or AYAME-IRO?--------
Total:30 questions.(from color name text book)
• No “correct” answer• Easy to be influenced

Four experiments1. Compared agent and robot2. Compared agent and robot in physical
world3. Measured the effect of eye contact4. Measured the effect of shared-attention
Yamato, J., Shinozawa, K., Brooks, R., and Naya, F. Human-Robot Dynamic Social Interaction. NTT Technical Review 1, 6(2003), 37-43.
Detailed description of Experiment 1 and 2
Available on-linehttp://www.ntt.co.jp/tr/Back number -> Sep. 2003
Shinozawa, K., Naya, F., Yamato, J., and Kogure, K. Differences in Effect of Robot and Screen Agent Recommendations on Human Decision-Making , IJHCS (to appear)
Experiment 1, 2, and description of K4(robot)
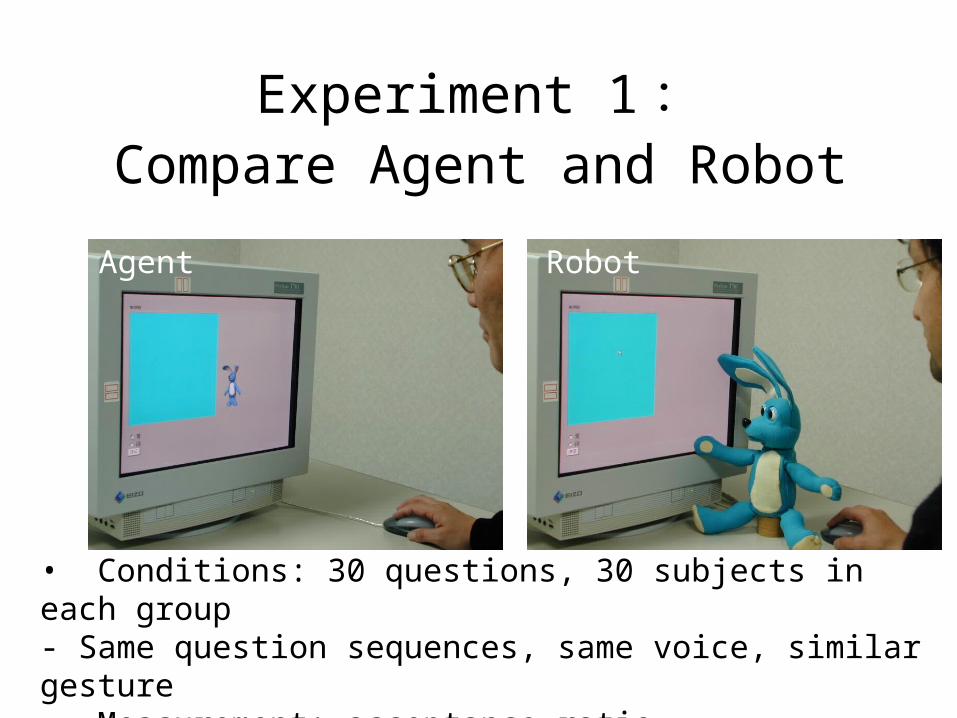
Experiment 1 :Compare Agent and Robot
• Conditions: 30 questions, 30 subjects in each group‐ Same question sequences, same voice, similar gesture• Measurement: acceptance ratio, questionnaire
Agent RobotAgent Robot

Experiment 1: Robot
QuickTime˛ Ç∆MPEG-4 ÉrÉfÉI êLí£ÉvÉçÉOÉâÉÄ
ǙDZÇÃÉsÉNÉ`ÉÉÇ å©ÇÈÇΩÇflÇ…ÇÕïKóvÇ≈Ç∑ÅB

Experiment 1: Result
• Acceptance : agent > robot (p<.01)
• Familiarity : independent

Initial expectationRobot has more influence because it lives in 3D world,same as subjects.
ag
en
tro
bot
○
×
GapGap Gap

Experiment 2: Compare in physical world
Color plate
Button box
Button box
• No recommendation (30 subjects)• Recommendation by robot ( 31 subjects )• Recommendation by agent (30 subjects)

Experiments

Experiment 2: Result
• selection ratio : robot > agent ( p < 0.05) robot>> no recommendation ( p < 0.01)

Experiment 1 and 2: Results
Media world Physical world
agen
tro
bot
Consistency matters.
○
× ○
×
Embodiment and communication

Why robot is better?
• Easy to detect gaze– Eye contact– Shared attention/joint attention
Measure the effect of eye contact and shared-attention
• Eye contact was established by face tracking
• Eye contact time: period that subject looked at robot and robot looked at subject
• Eye contact time and selection ratio?
• Two groups (14 subjects each)
– Eye contact, and NO eye contact
Experiment 3: Effect of eye contact (mutual gaze)

Robots
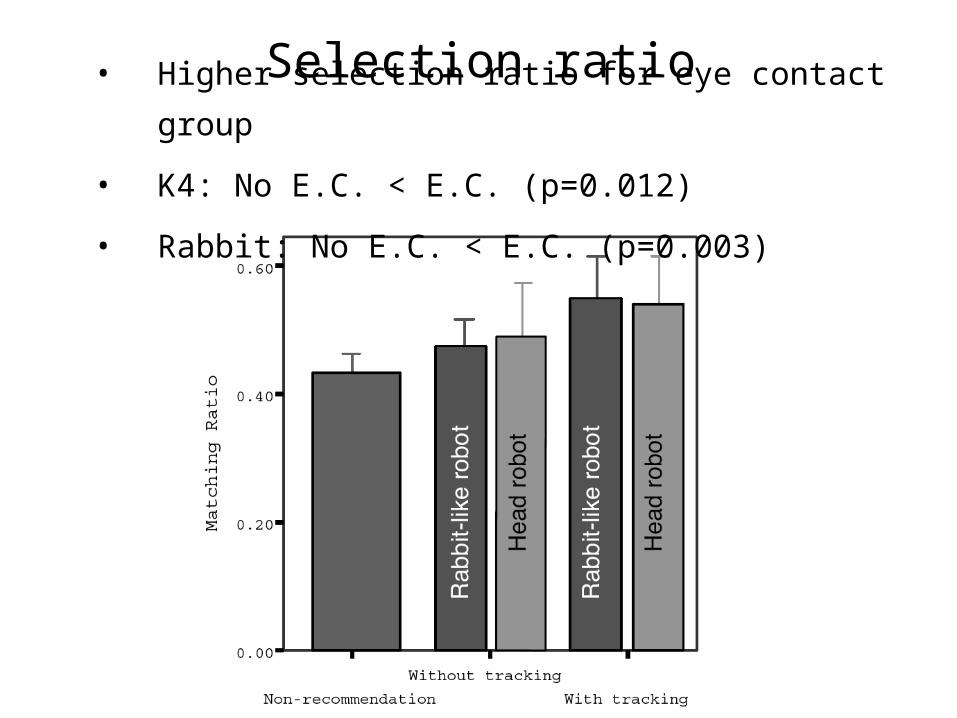
• Higher selection ratio for eye contact group
• K4: No E.C. < E.C. (p=0.012)
• Rabbit: No E.C. < E.C. (p=0.003)
Selection ratio

• Shared attention:– Period that robot looks at an object and
subject looks at the same object. (color
plate, button box)• SA time and selection ratio
– Is there correlation?
Experiment 4: Effect of shared-attention

• Robot looks at color plate and button box by prepared program
• Eye contact established by face tracking
Establishing shared-attention
QuickTime˛ Ç∆ÉtÉHÉg - JPEG êLí£ÉvÉçÉOÉâÉÄǙDZÇÃÉsÉNÉ`ÉÉÇ å©ÇÈÇΩÇflÇ…ÇÕïKóvÇ≈Ç∑ÅB
QuickTime˛ Ç∆ÉtÉHÉg - JPEG êLí£ÉvÉçÉOÉâÉÄǙDZÇÃÉsÉNÉ`ÉÉÇ å©ÇÈÇΩÇflÇ…ÇÕïKóvÇ≈Ç∑ÅB
QuickTime˛ Ç∆ÉtÉHÉg - JPEG êLí£ÉvÉçÉOÉâÉÄǙDZÇÃÉsÉNÉ`ÉÉÇ å©ÇÈÇΩÇflÇ…ÇÕïKóvÇ≈Ç∑ÅB
Example: video

• 28 subjects• SA time = 51.7 sec (total for 30 questions)
– (Longer than in Experiment 3 )• Selection ratio. Average: 0.57 S.D.= 0.14
• Some subjects were positive, and others were not. Clear contrast, from the questionnaire.
Example: Robot is prompting wrong choice. I feel the robot forced me to select his recommendation (negative).
Experimental conditions

• No correlation
SA time and selection ratio
Shared-Attention time (count) 50count=1sec.
Selection ratio
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 500 1000 1500 2000 2500 3000 3500 4000
ånóÒ1

• Ego-gram based on transactional analysis
• Measure three ego-states by questionnaire– CP, NP (critical parent, nurturing
parent)– A (adult)– FC, AC (free child, adapted child)
• TEG (Tokyo Univ. Egogram ) is common in Japan
Clustering subjects by TEG(Ego-gram)

• Strong correlation in SA time and acceptance ratio for high
AC (Adapted Child) group
High/Low TEG measurement and SA time.
CP NP A FC AC
Threshold (threshold) 10 17 12 14 12
Selection ratio High group 0.548717949 0.564444444 0.564285714 0.617948718 0.597777778
Low group 0.586666667 0.574358974 0.573809524 0.526666667 0.535897436
SAtime2553.461538 2581.933333 2575.285714 2587.615385 2510.866667
2612.266667 2588.461538 2594.642857 2582.666667 2670.461538
Correlation fo High -0.046541377 -0.035889649 -0.03145821 0.136152737 0.405908084
SAtime and sel ratio Low 0.054648939 0.10996751 0.055147415 -0.078258186 -0.461514856

• Positive correlation(Speaman’s r=0.51,p=0.051).
SA time and selection ratio (high AC & low CP group)

• High-SA group = high selection ratio (p<0.05)
SA time and selection ratio
( high AC group)

• High AC subject (obedient type) showed
positive correlation between SA time and
selection ratio.
• No significant difference between SA time itself
and selection ratios for high AC and low AC
groups
• Eye contact and shared-attention promote
close communication. Some people like such
intimate relation, but others don’t. It depends
on the character.
• SA is effective. Even SA was not “actually”
realized. We do not need to develop image
understanding technology; we just have to fake
it.
Result and Discussion


















