EEL 6897 1 Software development for real-time engineering systems.
25
EEL 6897 1 Software development for real-time engineering systems
-
Upload
bethanie-dalton -
Category
Documents
-
view
216 -
download
0
Transcript of EEL 6897 1 Software development for real-time engineering systems.

EEL 6897 1
Software development for real-time engineering systems

EEL 6897 2
Acknowledgements
• These lecture slides were adopted from the slides of Andy Wellings

EEL 6897 3
Book
RTSJ Version 1.0.1

EEL 6897 4
Prerequisites
• You should already:
– be a competent programmer in an imperative programming language like C, C++, C# etc
– be able to program in sequential Java
– have a good understanding of Operating System Principles, in particular the mechanisms needed to support concurrency, e.g. processes, semaphores, etc

EEL 6897 5
Overall technical aims of the course
• To understand the basic requirements of concurrent and real-time systems
• To be able to create concurrent programs
• To be able to create advanced concurrent real-time systems

EEL 6897 6
Concurrent programming
• The name given to programming notation and techniques for expressing potential parallelism and solving the resulting synchronization and communication problems
• Implementation of parallelism is a topic in computer systems (hardware and software) that is essentially independent of concurrent programming
• Concurrent programming is important because it provides an abstract setting in which to study parallelism without getting bogged down in the implementation details

EEL 6897 7
Why we need it
• To fully utilise the processor
10-7
10-6
10-5
10-4
10-3
10-2
10-1
102
101
10-8
10-9
Res
pons
e ti
me
in s
econ
ds
100 human tape
floppy
CD
memory
processor

EEL 6897 8
Parallelism Between CPU and I/O DevicesCPU I/O Device
Initiate I/OOperation Process I/O
Request
Signal Completion
Interrupt I/ORoutine I/O Finished
Continue withOutstanding Requests

EEL 6897 9
Why we need it (cont’d)
• To allow the expression of potential parallelism so that more than one computer can be used to solve the problem
• Consider trying to find the way through a maze

EEL 6897 10
Sequential Maze Search

EEL 6897 11
Concurrent Maze Search

EEL 6897 12
Why we need it (cont’d)
• To model the parallelism in the real world
• Virtually all real-time systems are inherently concurrent — devices operate in parallel in the real world
• This is, perhaps, the main reason to use concurrency

EEL 6897 13
Air Traffic Control

EEL 6897 14
Why we need it
• Alternative: use sequential programming techniques
• The programmer must construct the system as the cyclic execution of a program sequence to handle the various concurrent activities
• This complicates the programmer's task and involves considerations of structures which are irrelevant to the control of the activities in hand
• The resulting programs will be more obscure and inelegant
• Decomposition of the problem is more complex
• Parallel execution of the program on more than one processor is more difficult to achieve
• The placement of code to deal with faults is more problematic

EEL 6897 15
Terminology
• A concurrent program is a collection of autonomous sequential processes, executing (logically) in parallel
• Each process has a single thread of control
• The actual implementation (i.e. execution) of a collection of processes usually takes one of three forms.
Multiprogramming– processes multiplex their executions on a single processor
Multiprocessing– processes multiplex their executions on a multiprocessor system
where there is access to shared memory
Distributed Processing– processes multiplex their executions on several processors which do
not share memory

EEL 6897 16
What is a real-time system?
• A real-time system is any information processing system which has to respond to externally generated input stimuli within a finite and specified period
– the correctness depends not only on the logical result but also the time it was delivered
– failure to respond is as bad as the wrong response!
• The computer is a component in a larger engineering system => EMBEDDED COMPUTER SYSTEM
• 99% of all processors are for the embedded systems market

EEL 6897 17
Terminology• Hard real-time — systems where it is absolutely
imperative that responses occur within the required deadline. E.g. Flight control systems.
• Soft real-time — systems where deadlines are important but which will still function correctly if deadlines are occasionally missed. E.g. Data acquisition system.
• Firm real-time — systems which are soft real-time but in which there is no benefit from late delivery of service.
• A system may have all hard, soft and firm real-time subsystems. Many systems may have a cost function associated with missing each deadline

EEL 6897 18
A simple fluid control system
Pipe
Flow meter
Valve
Interface
ComputerTime
Input flowreading
Processing
Output valveangle

EEL 6897 19
A Grain-Roasting Plant
Fuel Tank
Furnace
Bin
Pipe
fuel
grain

EEL 6897 20
A Process Control System
ProcessControl
Computer
ChemicalsandMaterials
ValveTemperatureTransducer
StirrerFinishedProducts
PLANT

EEL 6897 21
A Production Control System
ProductionControlSystem
Parts
Machine Tools Manipulators Conveyor Belt
FinishedProducts

EEL 6897 22
A Command and Control System
Temperature, Pressure, Power and so on
Terminals
Command and ControlComputer
CommandPost
Sensors/Actuators
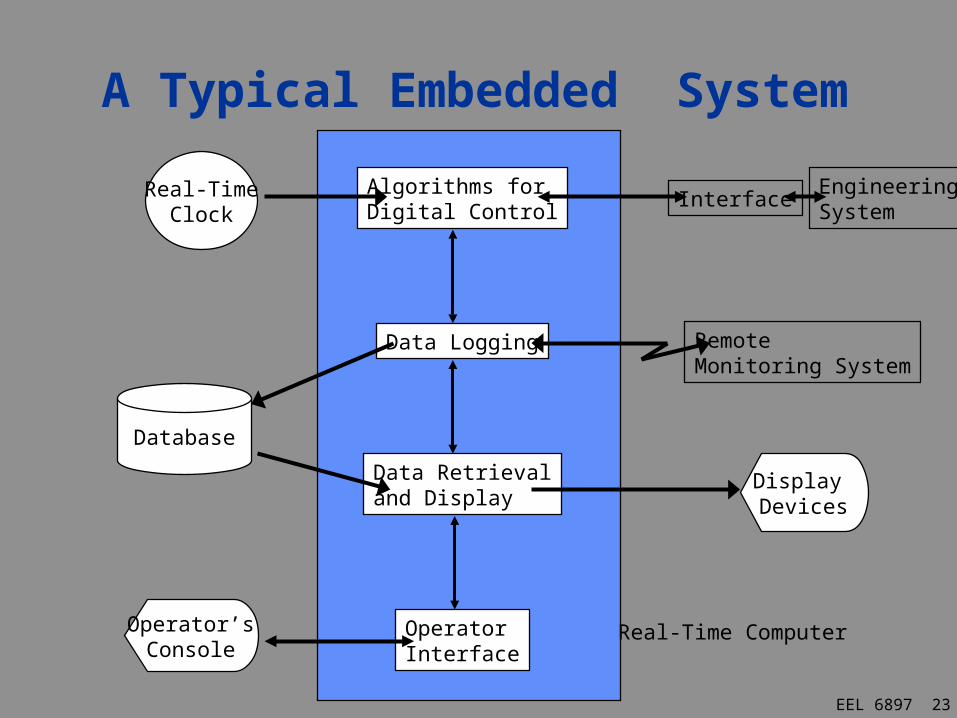
EEL 6897 23
A Typical Embedded System
Algorithms forDigital Control
Data Logging
Data Retrievaland Display
OperatorInterface
InterfaceEngineeringSystem
RemoteMonitoring System
Real-TimeClock
Database
Operator’sConsole
Display Devices
Real-Time Computer

EEL 6897 24
Characteristics of a RTS
• Large and complex — vary from a few hundred lines of assembler or C to 20 million lines of Ada estimated for the Space Station
• Concurrent control of separate system components — devices operate in parallel in the real-world; better to model this parallelism by concurrent entities in the program
• Facilities to interact with special purpose hardware — need to be able to program devices in a reliable and abstract way

EEL 6897 25
Characteristics of a RTS
• Extreme reliability and safe — embedded systems typically control the environment in which they operate; failure to control can result in loss of life, damage to environment or economic loss
• Guaranteed response times — we need to be able to predict with confidence the worst case response times for systems; efficiency is important but predictability is essential