Edited and presented by Alberto Sangiovanni-Vincentelli UC ...Alberto Sangiovanni-Vincentelli UC...
38
Chess Review October 4, 2006 Alexandria, VA Edited and presented by Experimental Research Alberto Sangiovanni-Vincentelli UC Berkeley
Transcript of Edited and presented by Alberto Sangiovanni-Vincentelli UC ...Alberto Sangiovanni-Vincentelli UC...

Chess ReviewOctober 4, 2006Alexandria, VA
Edited and presented by
Experimental Research
Alberto Sangiovanni-VincentelliUC Berkeley

ITR Review, Oct. 4, 2006"Experimental Research", ASV 2
Overview
• Experimental research is an essential component of CHESS– Feedback on approach– Inspiration for new theory– Impact
• Wide range– Industrial and Government test cases
• Automotive (safety-critical distributed systems) to be covered in the afternoon (GM, Toyota)
• System-on-Chip (high-complexity platforms; Intel, Infineon, Xilinx)
• Avionics• Wireless Sensor Networks (COMAU, Pirelli)
– Internal experimental test benches• UAVs (complex control, sensor integration)
– New domains:• Hybrid Systems in Systems Biology to be covered in the
afternoon
ITR Review, Oct. 4, 2006"Experimental Research", ASV 3
Overarching Criteria
• An application should exercise – Theory: hybrid models, Models of Computation,
control algorithms– Tools and Environments– Path to implementation
• An application should be relevant for industry or for government agencies

ITR Review, Oct. 4, 2006"Experimental Research", ASV 4
Some Applications Addressed
Automotive
Avionics: UAVs
Networked Embedded Systems
Systems Biology
Automotive

ITR Review, Oct. 4, 2006"Experimental Research", ASV 5
Outline
• Industrial Test Cases– Automotive (safety-critical distributed systems) to be
covered in the afternoon (GM, Toyota)– System-on-Chip (high-complexity platforms; Intel,
Infineon, Xilinx)– Avionics– Wireless Sensor Networks (COMAU, Pirelli)
• Internal experimental test benches– UAVs, – Pursuing-Monitoring (complex control, sensor integration)
• New domains:– Hybrid Systems in Systems Biology to be covered in the
afternoon

ITR Review, Oct. 4, 2006"Experimental Research", ASV 6
Intel MXP5800 Architecture
• Designed for Imaging Applications• Highly Heterogeneous Programmable Platform• Top Level: 8 Image Signal Processors with Mesh

ITR Review, Oct. 4, 2006"Experimental Research", ASV 7
Design Space Exploration
• Replication of scenarios from Intel library
• Accurate Performance Modeling
• Easy implementation of additional scenarios
Cycles for different scenarios
0
500
1000
1500
2000
2500
Hardware Balanced OPE emphasis OPE Heavy
Scenario
Cyc
les
Metropolis ScenariosIntel Software Library
[A. Davare, Q. Zhu, J. Moondanos, ASV, “JPEG Encoding on the MXP5800: A Platform-based Design Case Study,” Proceedings of EstiMedia 2005]
Jens Harnisch, CPR ST
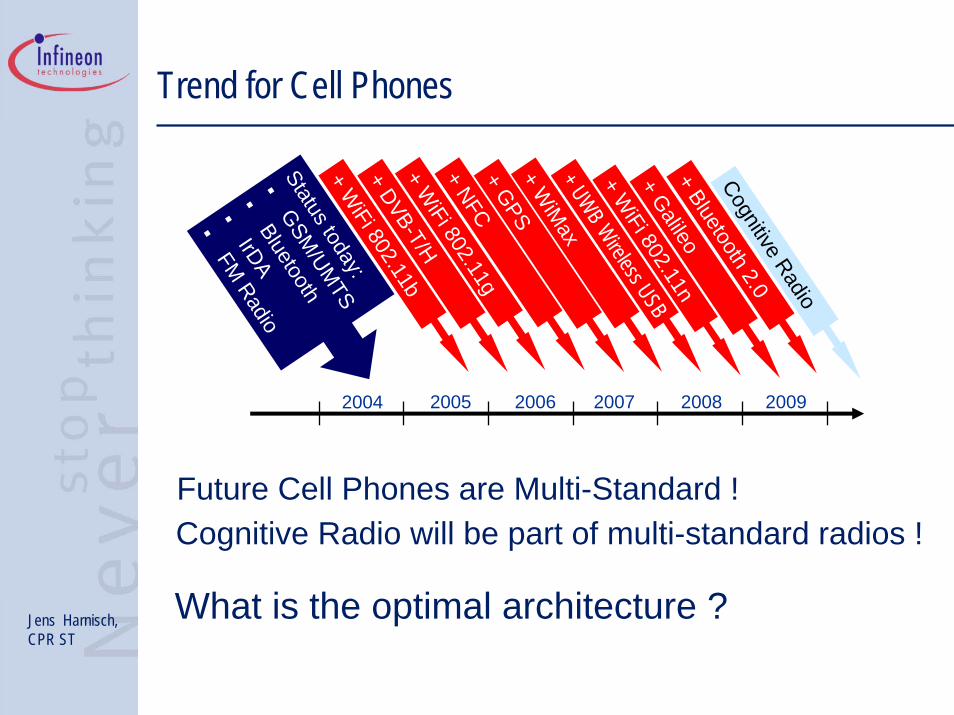
2004 2005 2006 2007 2008 2009
Status today:
GSM/UM
TS
Bluetooth
IrDAFM Radio
+ WiFi 802.11b
+ DVB-T/H
+ WiM
ax+ UWB Wireless USB
+ NFC
+ WiFi 802.11g
+ WiFi 802.11n
+ Bluetooth 2.0
+ GPS
+ Galileo
Cognitive Radio
Trend for Cell Phones
Future Cell Phones are Multi-Standard !Cognitive Radio will be part of multi-standard radios !
What is the optimal architecture ?

Jens Harnisch, CPR ST
Wireless Platform Modeling
functionmodeling
• WCDMA, DVB-H, UWB, • WLAN, WIMAX,• CR
Common Research Agenda:• benchmarks• real-time modeling in f&a • systematic design space exploration• connection between function and architecture model• common rules for modeling • synergy in designing code generators • „Future-proof“ framework for Function&Architecture Modeling
(Matlab, Simulink, Metropolis)
architecture modeling• multiple program- reconfigurable DP+IC fpga-inspired
mable processors architecture architectures
front-end for code generators
back-end back-end back-end

ITR Review, Oct. 4, 2006"Experimental Research", ASV 10
Model-based Design of Software Defined Radio
GME-based SCA Modeling Environment
SCA Comp X
CORE
SCA Comp Y
CORE
Component Model
Hardware (Platform) Model
allocation
allocation
Wrapper Gen
import
PerformanceSimulator
(DES)
PowerSimulator
Design SpaceExploration
SynthesisTools
Open Tool Integration Framework
GME-based SCA Modeling Environment
SCA Comp X
CORECORE
SCA Comp Y
CORECORE
Component Model
Hardware (Platform) Model
allocation
allocation
Wrapper Gen
import
PerformanceSimulator
(DES)
PowerSimulator
Design SpaceExploration
SynthesisTools
Open Tool Integration Framework
Goal:Design and Synthesis of Software Defined Radio (SDR) based on the Software Communications Architecture (SCA)
Used by:BAE Systems for design of SCA SDR applications
•SCA Component Modeling•Interface Adapter modeling and synthesis
•Automatically synthesize component wrappers for Simulink-RTW generated implementations•Performance Simulation of Software Radio applications

ITR Review, Oct. 4, 2006"Experimental Research", ASV 11
Embedded Microprocessor Performance Modeling
• Single Processor Modeling (2003-2005)– Abstract Performance Modeling of XScale
and StrongARM Microarchitectures– A Visual Language for Retargeting the
Microarchitectural Models
• Modeling a Wireless Multiprocessor (2005-?)– Developed High-Level Abstract System
Model of Architecture, Functionality, and a Mapping
– Definition of Levels of Abstraction (next slide)
– Ongoing Development of Performance Backwards Annotation
etropolis
etropolis

ITR Review, Oct. 4, 2006"Experimental Research", ASV 12
Wireless Multiprocessor Modeling• Modeling Infineon Wireless SDR
Multiprocessor in Metropolis• Key Problems
– Slow Simulation Speed– Little or No
Design Space Exploration• Solution Criteria
– Abstraction(for Speed)
– Performance Annotation (for Accuracy)
ARMARMProcessing Chain 0Processing Chain 0
aProc1
MACMAC
RxSplitterRxSplitter
PhyMergerPhyMerger
Buses
and
Bus Slaves
SIMD0
sProc0_0
sProc0_1SIMD
0sProc0_0
sProc0_1SIMD
0SIMD
0sProc0_0
sProc0_1
SIMD1
sProc1_0
sProc1_1SIMD
1sProc1_0
sProc1_1SIMD
1SIMD
1sProc1_0
sProc1_1
SIMD2
sProc2_0
sProc2_1SIMD
2sProc2_0
sProc2_1SIMD
2SIMD
2sProc2_0
sProc2_1
SIMD3
sProc3_0
sProc3_1SIMD
3sProc3_0
sProc3_1SIMD
3SIMD
3sProc3_0
sProc3_1
Processing Chain 4Processing Chain 4
Processing Chain 1Processing Chain 1
Processing Chain 5Processing Chain 5
Processing Chain 2Processing Chain 2
Processing Chain 3Processing Chain 3
BusBridge0
BusBridge0
RFInterface1
RFInterface0-1
RFInterface1
RFInterface1
RFInterface0-1
RFInterface0-1
FIRProcess
ARMμP
ARMμP
ARMμP
ARMμP
…
CODECProcess
Turbo/Viterbi
CODECProcessCODECProcess
Turbo/ViterbiTurbo/Viterbi
BusBridge1
BusBridge1
SystemBus 3
SystemBus 3
SIMDCore1SharedMem0-3
SIMDCore1SharedMem0-3SharedMem0-3
ARMScheduler
ARMScheduler
SIMD0 Scheduler
SIMD0 Scheduler
System Bus 5Scheduler
System Bus 5Scheduler
FIRFilterFIR
Filter
Shared Mem0-3Schedulers
Shared Mem0-3Schedulers RF Interface0-1
SchedulersRF Interface0-1
Schedulers
SystemBus 0
SystemBus 0
SIMD3 Scheduler
SIMD3 Scheduler
SystemBus 4
SystemBus 4
SystemBus 5
SystemBus 5
AMBABus0AMBABus0
AMBABus1AMBABus1
…
…
…
System Bus 4Scheduler
System Bus 4Scheduler
ARMProcesses
SIMDCore1SIMD
Core 3
…
SIMD3Processes
SIMDCore1SIMD
Core 3SIMDCore1SIMD
Core 3SIMD
Core 3
…
SIMD3Processes
…
SIMD3Processes
SIMDCore1SIMD
Core 0
…
SIMD0Processes
SIMDCore1SIMD
Core 0SIMDCore1SIMD
Core 0SIMD
Core 0
…
SIMD0Processes
…
SIMD0Processes
Rx_Splitter
Processingchain0
Processingchain5
… PHY Merger
Processingchain1MAC … …
Mapping
Architecture Function

ITR Review, Oct. 4, 2006"Experimental Research", ASV 13
Wireless Multiprocessor Modeling: Levels of Abstraction
Level Speed / Accuracy
Function / Architecture
Algorithmic Excellent / None
Concurrent / None
Annotated Algorithmic
Excellent / OK
Concurrent + Delays / None
Abstract (TLM) Model Good / Poor Concurrent / Timed Resources
Annotated Abstract Model
Good / Good Concurrent + Delays /Timed Resources
Cycle-Level OK / Cycle Level
ASM / SystemC
RTL-level Horrible / Signal Level
ASM / SystemC
Our Focus
Annotations

ITR Review, Oct. 4, 2006"Experimental Research", ASV 14
Recent work (I): Algorithms for mapping applications to chip multiprocessor systems
Application description
Application task graph
Micro-architecture configuration
Task assignmentCommunication
assignmentData layout
Performance analysis on target platform
Application deployment from domain specific languages on to chip multiprocessor systems
FromDevice(0)Discard
ToDevice(0)
FromDevice(1)
FromDevice(2)
FromDevice(3)
Discard
ToDevice(1)
ToDevice(2)
ToDevice(3)
Discard
…
FromDevice(15)
LookupIPRoute
ToDevice(15)
… …
IPVerify DecIPTTL
DiscardDiscard
IPVerifyDecIPTTL
Discard
DiscardIPVerify
DecIPTTL
…
Discard
DecIPTTL
Discard
DecIPTTL
S1
R1 L1 T1
R2 L2 T2
S2
P1 P2
M1
R1 L1 T1
R2 L2 T2
S1 S2
MicroBlaze(soft)
FSL
OPB
PLB
Hardware acceleration
Ethernet
Off-chip SDRAM
On-chip BRAM
PECo-PE PECo-PEMEM MEM
MEM PECo-PEMEM
PERIPHERALMEM
Mapping challenge:
Map parallel tasks in the application to the processors, memories and communication links on the multiprocessor platform
Domain specific language such as Click, Simulink
Intermediate representation of parallel tasks and dependencies
Our approaches for task allocation and resource constrained scheduling:
List scheduling heuristicsConstraint optimization using ILP, SAT

ITR Review, Oct. 4, 2006"Experimental Research", ASV 15
Recent work (II): Exploration tool for FPGA-based soft multiprocessor systems
MicroBlaze soft processor
Pack
et R
ecep
tion
Pack
et
Tran
smis
sion
Lookup TransmitVerify
Lookup TransmitVerify
Lookup TransmitVerify
FSL
BRAM BRAMRS232 Timer
LEDs
Lookup
Lookup
Lookup
Lookup TransmitVerify Lookup
BRAM BRAM
OPB
From0) To(0)
From(1) To(1)
LookupIPRoute
• How do we use reconfigurable platforms?– Conventional approach: HDL onto LUTs– Alternatively, program a multiprocessor
• Craft network of “soft” processors in reconfigurable logic
• Device memory and communication schemes
• Advantages of soft multiprocessors– Combine software productivity and platform
reconfigurability– Open FPGAs to world of software designers
• Experimental study– IPv4 packet forwarding application
• 1.8 Gbps throughput on 16 processor system– Fast extension to Network Address Translation
• Tomahawk– our automated tool for design space exploration
of soft multiprocessor systems
IPv4 Packet Forwarding
Soft Multiprocessor System on an FPGA
Application deployment: Software program on a multiprocessor system

ITR Review, Oct. 4, 2006"Experimental Research", ASV 16
Outline
• Industrial Test Cases– Automotive (safety-critical distributed systems) to be
covered in the afternoon (GM, Toyota)– System-on-Chip (high-complexity platforms; Intel,
Infineon, Xilinx)– Avionics– Wireless Sensor Networks (COMAU, Pirelli)
• Internal experimental test benches– UAVs, – Pursuing-Monitoring (complex control, sensor integration)
• New domains:– Hybrid Systems in Systems Biology to be covered in the
afternoon

ITR Review, Oct. 4, 2006"Experimental Research", ASV 17
Current projects
• Real time strategies for aircraft conflict resolution
• Mixed initiative control in critical aviation systems– Civil Autoland study
• NSF/NCO National Workshop in Critical Aviation Systems– October 5/6, Alexandria VA

ITR Review, Oct. 4, 2006"Experimental Research", ASV 18
Design and verification of hybrid and embedded systems
1. Model inference2. Offline to online
verification/testing3. Mixed initiative
control4. Online optimization
for competing, distributed entities
5. Embedded software
altitude
headingchange
flight levelchange
velocity

ITR Review, Oct. 4, 2006"Experimental Research", ASV 19
Real time model checking for aircraft collision avoidance

ITR Review, Oct. 4, 2006"Experimental Research", ASV 20
Application to Autoland Interface• Controllable flight envelopes for landing and Take Off / Go
Around (TOGA) maneuvers may not be the same• Pilot’s cockpit display may not contain sufficient information
to distinguish whether TOGA can be initiated
flareflaps extendedminimum thrust
rolloutflaps extendedreverse thrust
slow TOGAflaps extended
maximum thrust
TOGAflaps retracted
maximum thrust
flareflaps extendedminimum thrust
rolloutflaps extendedreverse thrust
TOGAflaps retracted
maximum thrust
revised interface
existing interface
controllable flare envelope
controllable TOGA envelopeintersection

ITR Review, Oct. 4, 2006"Experimental Research", ASV 21
Test bedsTestbed of Autonomous Rotorcraft for Multi-Agent Control– Quadrotor Design– Autonomous Control– Wireless– Full Onboard Sensing
• IMU, GPS, SODAR
ITR Review, Oct. 4, 2006"Experimental Research", ASV 22
Outline
• Industrial Test Cases– Automotive (safety-critical distributed systems) to be
covered in the afternoon (GM, Toyota)– System-on-Chip (high-complexity platforms; Intel,
Infineon, Xilinx)– Avionics– Wireless Sensor Networks (COMAU, Pirelli)
• Internal experimental test benches– UAVs, – Pursuing-Monitoring (complex control, sensor integration)
• New domains:– Hybrid Systems in Systems Biology to be covered in the
afternoon
ITR Review, Oct. 4, 2006"Experimental Research", ASV 23
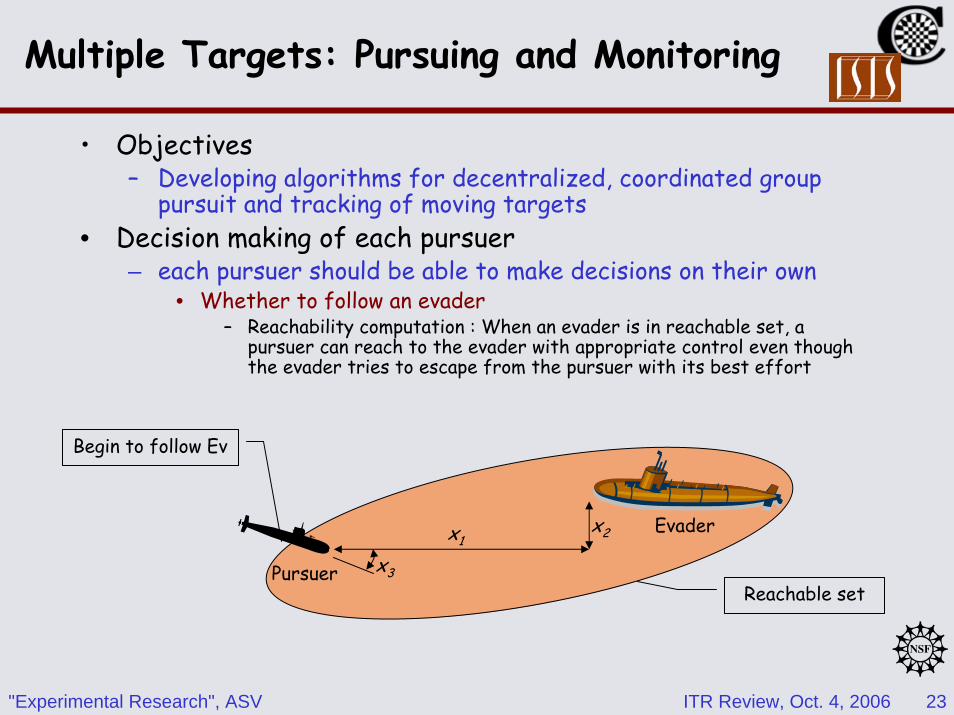
Multiple Targets: Pursuing and Monitoring
• Objectives– Developing algorithms for decentralized, coordinated group
pursuit and tracking of moving targets• Decision making of each pursuer
– each pursuer should be able to make decisions on their own• Whether to follow an evader
– Reachability computation : When an evader is in reachable set, a pursuer can reach to the evader with appropriate control even though the evader tries to escape from the pursuer with its best effort
Evader
PursuerReachable set
Begin to follow Ev
x1x2
x3

ITR Review, Oct. 4, 2006"Experimental Research", ASV 24
Reachability computation
• The reachable sets are computed offline using Ian Mitchell’s toolbox of level set method and stored for rapid lookup at run-time
• Reachable set used in simulations – Evader : speed = 2m/s,
maneuvering rate = 0.1rad/s– Pursuer : speed = 1m/s,
maneuvering rate = 1.0rad/s– X1 : longitudinal distance between
an evader and a pursuer– X2 : lateral distance between an
evader and a pursuer– X2 : relative angle between an
evader and a pursuer

ITR Review, Oct. 4, 2006"Experimental Research", ASV 25
Multiple targets/evaders for a pursuer
• One pursuer may have more than two evaders in its reachable sets, i.e. one pursuer is capable of intercepting more than two evaders– Each pursuer uses proximity to decide which
evader to follow
– The above pursuer decides to follow evader1
Evader1
PursuerReachable sets
Evader2
d1
d2

ITR Review, Oct. 4, 2006"Experimental Research", ASV 26
Collision avoidance
• Pursuers in monitoring mode are penalized when they are too close to each other so that they can avoid collision
Pursuer1
Reachable sets
Evader
Pursuer2

ITR Review, Oct. 4, 2006"Experimental Research", ASV 27
Outline
• Industrial Test Cases– Automotive (safety-critical distributed systems) to be
covered in the afternoon (GM, Toyota)– System-on-Chip (high-complexity platforms; Intel,
Infineon, Xilinx)– Avionics– Wireless Sensor Networks (COMAU, Pirelli)
• Internal experimental test benches– UAVs, – Pursuing-Monitoring (complex control, sensor integration)
• New domains:– Hybrid Systems in Systems Biology to be covered in the
afternoon

ITR Review, Oct. 4, 2006"Experimental Research", ASV 28
Platforms & Design Flow
SNSP
SNAPP
SNIP
ZigBee Bluetooth
MICA TELOS
…
E2E requirements
…
Nodes performance
QoSClass
SelectProtocol Optimize
parametersExecute Service
ApplicationAbstraction Layers Mapping Flow
SelectResources
Serv.1 Serv.2 Serv.3
FlexRand
Invoke Services
RFID
Automatic Real-TimeMapper

ITR Review, Oct. 4, 2006"Experimental Research", ASV 29
Example: Industrial Plants (COMAU)
Monitoring:Vibrations, Temperature, Humidity, Position, Logistics
Control and Actuation:Robot movements, Temperature, Storage
Current solution:Wired Infrastructure
Future solution:WIRELESS
Wireless advantages:Reduce cablingEnhance flexibilityEasy to deploy Higher safety Decreased maintenance costs

ITR Review, Oct. 4, 2006"Experimental Research", ASV 30
Heterogeneous Embedded Systems: Industrial Automation, Building Automation
• Control and Diagnostics of a Manufacturing Cell– deployment of vibration sensors on the robots
• High safety critical standards and security requirements in a harsh environment– interesting design driver for distributed (networked) control (possibly with
wireless sensor/actuator networks)

ITR Review, Oct. 4, 2006"Experimental Research", ASV 31
Wireless Embedded Networks for Ubiquitous Control
Control
PRODUCTIONLINE
PRODUCTUNDER
DEVELOPMENT
ROBOT
PLC
PRODUCTIONLINE
PRODUCTIONLINE
PRODUCTUNDER
DEVELOPMENT
ROBOT
PLC
PRODUCTIONLINE
PRODUCTIONLINE
PRODUCTUNDER
DEVELOPMENT
ROBOT
PLC
PRODUCTIONLINE
HeterogeneousNetwork
Support SNSPSupport Different RF interfacesAbstraction of lower layerReal Time Mapper
Hierarchical SystemRemote access

ITR Review, Oct. 4, 2006"Experimental Research", ASV 32
Outline
• Industrial Test Cases– Automotive (safety-critical distributed systems) to be
covered in the afternoon (GM, Toyota)– System-on-Chip (high-complexity platforms; Intel,
Infineon, Xilinx)– Avionics– Wireless Sensor Networks (COMAU, Pirelli)
• Internal experimental test benches– UAVs, – Pursuing-Monitoring (complex control, sensor integration)
• New domains:– Hybrid Systems in Systems Biology to be covered in the
afternoon

ITR Review, Oct. 4, 2006"Experimental Research", ASV 33
Antibiotic biosynthesis in Bacillus subtilis(Hu, Wu, Abate, Sastry)
SpaI
signaltransduction
spaK
spaR
spaG
spaE
spaF
spaI
spaS
spaC
spaT
spaB
subtilinprecursor
SpaK
SpaR~p
SpaT
SpaE+SpaG
SpaF
SpaB
SpaC
p
mature subtilin
modificationtransportcleavage
immunitySigH
SigH
spaRK SpaRK SpaSspaSS1 S2
= discrete states (with randomness) = continuous states
modeling with stochastic hybrid systemInput(food)
Output(subtilin)
actual production network

ITR Review, Oct. 4, 2006"Experimental Research", ASV 34
Antibiotic biosynthesis in Bacillus subtilis(Hu, Wu, Abate, Sastry)
• Provided Stochastic Hybrid System Model for the generation of subtilin by B. Subtilis;
• ‘Controlled’ the network through food (input) and observed subtilin evolution (output);
• Analyzed dynamical properties, motivated importance of the ‘hybrid’ and ‘stochastic’ behaviors; proposed biological interpretations;
• Suggested extensions, according to data from Literature in Biology;
• More recently:– Extension of the model; – Investigation of issues of modularity/scalability/data
decentralization in large population environments;– Survival Analysis: use of models from ‘probabilistic safety’ and
arguments from ‘stochastic optimal control’ (see research on SHS by Abate-Amin) to justify evolutionary traits in B. Subtilis.

ITR Review, Oct. 4, 2006"Experimental Research", ASV 35
Planar cell polarity in Drosophila (Claire’s group)
phenotype
cell model proteins feedback network
•Simulations•Parametersestimation
•Study of mutants
ITR Review, Oct. 4, 2006"Experimental Research", ASV 36
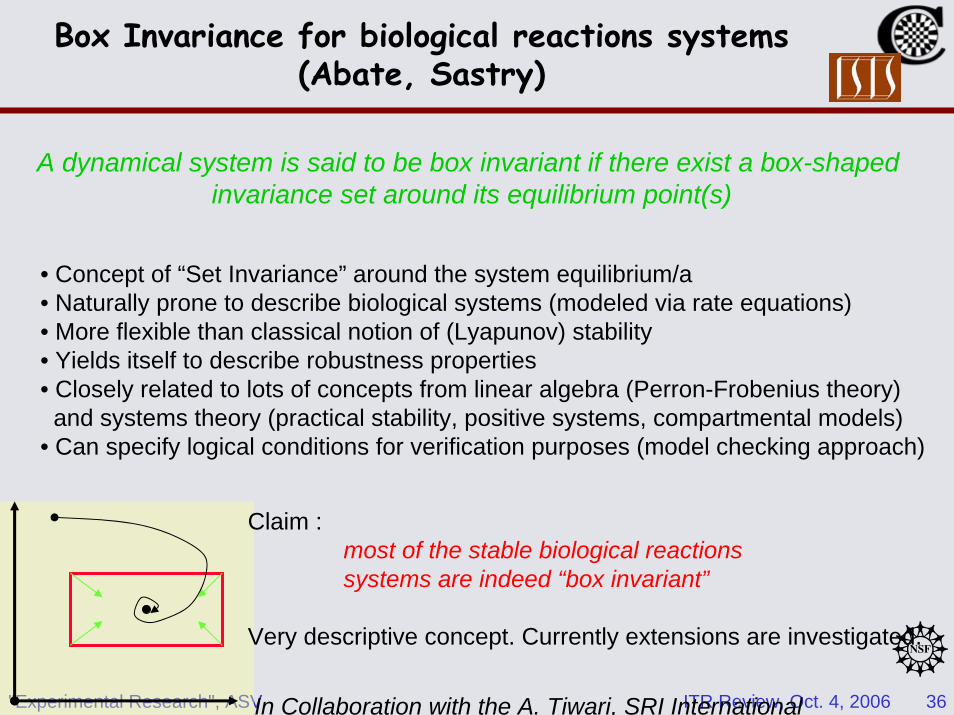
Box Invariance for biological reactions systems(Abate, Sastry)
• Concept of “Set Invariance” around the system equilibrium/a• Naturally prone to describe biological systems (modeled via rate equations)• More flexible than classical notion of (Lyapunov) stability• Yields itself to describe robustness properties• Closely related to lots of concepts from linear algebra (Perron-Frobenius theory) and systems theory (practical stability, positive systems, compartmental models)
• Can specify logical conditions for verification purposes (model checking approach)
Claim : most of the stable biological reactionssystems are indeed “box invariant”
Very descriptive concept. Currently extensions are investigated.
In Collaboration with the A. Tiwari
A dynamical system is said to be box invariant if there exist a box-shaped invariance set around its equilibrium point(s)
, SRI International

ITR Review, Oct. 4, 2006"Experimental Research", ASV 37
Box Invariance for biological reactions systems:A simpleExample

ITR Review, Oct. 4, 2006"Experimental Research", ASV 38
Quantitative and Probabilistic Extensions of Pathway Logic (Abate)
Pathway Logic (SRI International): tool for symbolic modeling of biological pathways
based on formal methods and rewriting logic
• Protein functional domains and their interactions
• Queries performed through formal methods• Info exchanged is logic-based
Extensions:1. reasoning with quantitative data2. probabilistic interactions between different domains
In Collaboration with the PL team, SRI International
Results:1. Implemented software trial;2. Exploited ideas from Gillespie’s simulation algorithm and other methods;3. Embedded ideas in PMaude (rewrite-logic standard).