
XMM-Newton 1 A.Garcia, ESAC Spectral effects of PSF core excisting Madrid, 24. March 2009.

Edge Detection from Spectral DataWith Applications to PSF Estimation and Fourier Reconstruction
Aditya Viswanathan
School of Electrical, Computer and Energy Engineering, Arizona State [email protected]
Oct 22 2009
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 1 / 41

Prof. Anne Gelb is with the School of
Mathematical and Statistical Sciences,
Arizona State University
Prof. Douglas Cochran is with the School of
Electrical, Computer and Energy
Engineering, Arizona State University
Prof. Rosemary Renaut is with the School of
Mathematical and Statistical Sciences,
Arizona State University
Dr. Wolfgang Stefan is with the Department
of Computational and Applied Mathematics,
Rice University
Research supported in part by National Science Foundation grants
DMS 0510813 and DMS 0652833 (FRG).
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 2 / 41

Introduction Motivation
Why do we need edge data?
Solve PDE’s with shocks moreaccurately.
Identify tissue boundaries inmedical images and segment them.
Reconstruct piecewise-analyticfunctions from Fourier and otherspectral expansion coefficients withuniform and exponentialconvergence properties.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−4
−2
0
2
4
x (x pi)
Un(
x,t)
PDE Solution
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−10
−5
0
5Jump Function Approximation
[f](x
)
x
True Solutiontf = 0
tf = 50, Exp. Filtering, p=2
tf = 50, Exp. Filtering, p=8
tf = 0
tf = 50, Exp. Filtering, p=2
tf = 50, Exp. Filtering, p=8
(a) PDE solution withshock discontinuity
(b) MRI tissue bound-ary detection
−3 −2 −1 0 1 2 3−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5Function Reconstruction
x
g(x
)
TrueFourier reconstruction
(c) Fourier reconstruc-tion showing Gibbs
−3 −2 −1 0 1 2 3−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5Function Reconstruction
x
g(x
)
TrueAlt. reconstruction
(d) Alt. reconstruction
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 3 / 41

Introduction Motivation
Application – Magnetic Resonance Imaging
020
4060
80100
120
0
50
100
0
0.2
0.4
0.6
0.8
1
ωkx
Fourier Coefficients
ωky
|f(ω
kx,ω
ky)|
(e) Acquired Fourier Samples
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
kx
k y
Spiral scan trajectory
(f) Sampling Trajectory
Reconstructed phantom
(g) Reconstructed Image
Figure: MR Imaginga
aSampling pattern courtesy Dr. Jim Pipe, Barrow Neurological Institute,Phoenix, Arizona
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 4 / 41
Introduction Problem Statement
Problem Statement
Objective: To recover location, magnitude and sign of jump discontinuities from a finitenumber of spectral coefficients
Assumptions:
f is 2π-periodic and piecewise-smooth function in [−π, π).
Its jump function is defined as
[f ](x) := f(x+)− f(x−)
It has Fourier series coefficients
f(k) =1
2π
Z π
−πf(x)e−ikxdx , k ∈ [−N,N ]
A jump discontinuity is a local feature; i.e., the jump function at any point x onlydepends on the values of f at x+ and x−. However, f is a global representation; i.e.,f(k) are obtained using values of f over the entire domain [−π, π).
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 5 / 41

Concentration Method
Outline
1 IntroductionMotivationProblem Statement
2 Jump detection using the Concentration methodThe Concentration MethodConcentration FactorsStatistical Analysis of the Concentration MethodIterative Formulations
3 ApplicationsPSF Estimation in Blurring ProblemsApplications to Fourier Reconstruction
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 6 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
Let f contain a single jump at x = ζ.
f(k) =1
2π
Z π
−πf(x)e−ikxdx
=1
2π
Z ζ−
−πf(x)e−ikxdx+
Z π
ζ+f(x)e−ikxdx
!
=1
2π
f(x)
e−ikx
−ik
˛ζ−−π−Z ζ−
−πf ′(x)
e−ikx
−ik dx
+ f(x)e−ikx
−ik
˛πζ+−Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 7 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
Let f contain a single jump at x = ζ.
f(k) =1
2π
Z π
−πf(x)e−ikxdx
=1
2π
Z ζ−
−πf(x)e−ikxdx+
Z π
ζ+f(x)e−ikxdx
!
=1
2π
f(x)
e−ikx
−ik
˛ζ−−π−Z ζ−
−πf ′(x)
e−ikx
−ik dx
+ f(x)e−ikx
−ik
˛πζ+−Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 7 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
Let f contain a single jump at x = ζ.
f(k) =1
2π
Z π
−πf(x)e−ikxdx
=1
2π
Z ζ−
−πf(x)e−ikxdx+
Z π
ζ+f(x)e−ikxdx
!
=1
2π
f(x)
e−ikx
−ik
˛ζ−−π−Z ζ−
−πf ′(x)
e−ikx
−ik dx
+ f(x)e−ikx
−ik
˛πζ+−Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 7 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
f(k) =1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=`f(ζ+)− f(ζ−)
´ e−ikζ2πik
+f(−π)eikπ − f(π)e−ikπ
2πik+O
„1
k2
«Since f is periodic, f(−π) = f(π) and the second term vanishes.
f(k) = [f ](ζ)e−ikζ
2πik+O
„1
k2
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 8 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
f(k) =1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=`f(ζ+)− f(ζ−)
´ e−ikζ2πik
+f(−π)eikπ − f(π)e−ikπ
2πik+O
„1
k2
«Since f is periodic, f(−π) = f(π) and the second term vanishes.
f(k) = [f ](ζ)e−ikζ
2πik+O
„1
k2
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 8 / 41

Concentration Method The Concentration Method
Getting Jump Data from Fourier Coefficients
f(k) =1
2π
f(ζ−)e−ikζ − f(−π)eikπ
−ik −Z ζ−
−πf ′(x)
e−ikx
−ik dx
+f(π)e−ikπ − f(ζ+)e−ikζ
−ik −Z π
ζ+f ′(x)
e−ikx
−ik dx
«
=`f(ζ+)− f(ζ−)
´ e−ikζ2πik
+f(−π)eikπ − f(π)e−ikπ
2πik+O
„1
k2
«Since f is periodic, f(−π) = f(π) and the second term vanishes.
f(k) = [f ](ζ)e−ikζ
2πik+O
„1
k2
«
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 8 / 41

Concentration Method The Concentration Method
Extracting Jump Information
Let us compute a ‘filtered’ partial Fourier sum of the form
SN [f ](x) =
NXk=−N
„iπk
N
«f(k)eikx
SN [f ](x) =NX
k=−N
„iπk
N
«f(k)eikx
=NX
k=−N
„iπk
N
«»[f ](ζ)
e−ikζ
2πik+O
„1
k2
«–eikx
= [f ](ζ)1
2N
NXk=−N
eik(x−ζ) +
NXk=−N
O„
1
k
«eik(x−ζ)
First term is a scaled (by the jump value) Dirac delta localized at x = ζ (the jumplocation)
The second term is a manifestation of the global nature of Fourier data
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 9 / 41
Concentration Method The Concentration Method
Concentration Method (Gelb, Tadmor)
Generalized conjugate partial Fourier sum:
SσN [f ](x) = i
NXk=−N
f(k) sgn(k)σ
„|k|N
«eikx
where, σk,N (η) = σ( |k|N
) are known as concentration factors. Concentration factors haveto satisfy certain properties in order to be admissible. These include,
1
NXk=1
σ
„k
N
«sin(kx) be odd
2σ(η)
η∈ C2(0, 1)
3
Z 1
ε
σ(η)
η→ −π, ε = ε(N) > 0 being small
Under these conditions, we have the following relation (concentration property)
SσN [f ](x) = [f ](x) +O(ε), ε = ε(N) > 0 being small
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 10 / 41

Concentration Method The Concentration Method
Illustration of the Concentration Method
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 11 / 41

Concentration Method Concentration Factors
Classical Concentration Factors
Factor Expression
Trigonometric σT (η) =π sin(αη)
Si(α)
Si(α) =
Z α
0
sin(x)
xdx
Polynomial σP (η) = −p π ηpp is the order of the factor
Exponential σE(η) = C η exp
„1
αη (η − 1)
«C - normalizing constant; α - order
C =πR 1− 1
N1N
exp“
1α τ (τ−1)
”dτ
Table: Examples of concentration factors
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 12 / 41

Concentration Method Concentration Factors
Concentration Factors - Visualization in Fourier Space
−80 −60 −40 −20 0 20 40 60 800
0.5
1
1.5
2
2.5
3
3.5
4
k
sig(
eta)
Concentration Factors
TrigonometricPolynomialExponential
Figure: Envelopes of the Concentration Factors in Fourier Space
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 13 / 41

Concentration Method Concentration Factors
Concentration Factors - Typical Responses
−3 −2 −1 0 1 2 3−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
SN
[f](x
)
x
fS
N[f]
(a) Trigonometric Factor
−3 −2 −1 0 1 2 3−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
SN
[f](x
)
x
fS
N[f]
(b) Polynomial Factor
−3 −2 −1 0 1 2 3−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
SN
[f](x
)
x
fS
N[f]
(c) Exponential Factor
Figure: Characteristic Responses of the Concentration Factors to a Sawtooth Function
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 14 / 41

Concentration Method Concentration Factors
Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Jump Approximation − Trigonometric Factor
f
SN
[f]
(a) Trigonometric Factor
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x
f(x)
Jump Approximation − Exponential Factor
fS
N[f]
(b) Exponential Factor
Figure: Jump Response, N = 128
For images, we apply the concentrationmethod to each dimension separately
SσN [f ](x(y)) = iNX
l=−N
sgn(l)σ
„|l|N
«
·NX
k=−N
fk,l ei(kx+ly)
where the overbar represents thedimension held constant.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 15 / 41

Concentration Method Concentration Factors
Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Jump Approximation − Trigonometric Factor
f
SN
[f]
(a) Trigonometric Factor
−3 −2 −1 0 1 2 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x
f(x)
fS
N[f]
(b) Trigonometric Factor
Figure: Jump Response, N = 128
For images, we apply the concentrationmethod to each dimension separately
SσN [f ](x(y)) = iNX
l=−N
sgn(l)σ
„|l|N
«
·NX
k=−N
fk,l ei(kx+ly)
where the overbar represents thedimension held constant.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 15 / 41

Concentration Method Concentration Factors
Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Jump Approximation − Trigonometric Factor
f
SN
[f]
(a) Trigonometric Factor
−3 −2 −1 0 1 2 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x
f(x)
fS
N[f]
(b) Trigonometric Factor
Figure: Jump Response, N = 128
For images, we apply the concentrationmethod to each dimension separately
SσN [f ](x(y)) = iNX
l=−N
sgn(l)σ
„|l|N
«
·NX
k=−N
fk,l ei(kx+ly)
where the overbar represents thedimension held constant.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 15 / 41

Concentration Method Concentration Factors
Concentration Factor Design (Viswanathan, Gelb)
Choose a template function f , eg. the sawtooth function
f(x) =
x−π
2x < 0
x+π2
x > 0[f ](x) =
−π x = 00 else
Design σ such that SσN [f ](x) = iNX
k=−N
f(k) sgn(k)σ
„|k|N
«eikx closely matches
[f ].
Typical problem formulation
minσ
φ0(σ)
subject to φm(σ) = cm,
ψn(σ) ≤ cn
where cm, cn are constants and the objective and constraints are typically normmeasures or the conjugate partial sum evaluated at certain points/intervals in thedomain.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 16 / 41

Concentration Method Concentration Factors
Equivalence of Constraints and Admissibility Conditions
1
NXk=1
σ
„k
N
«sin(kx) be odd ⇐⇒ conjugate kernel real, odd; hence
σ(−η) = σ(η) with σ(0) = 0.
2σ(η)
η∈ C2(0, 1) ⇐⇒ include ‖σ‖2 or similar smoothness
metric in objective.
3
Z 1
ε
σ(η)
η→ −π, ε = ε(N) > 0 ⇐⇒ SσN [f ](ζ) = [f ](ζ)
ζ being a point of discontinuity.
(2) is not really an equivalence, but this turns out be practically inconsequential.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 17 / 41

Concentration Method Concentration Factors
Examples
Problem Formulation 1
minσ
‖ [f ]− SσN [f ] ‖2
subject to SσN [f ](0) = −π
Problem Formulation 2
minσ
‖ [f ]− SσN [f ] ‖1
subject to SσN [f ](0) = −π
Problem Formulation 3
minσ
‖ [f ]− SσN [f ] ‖1
subject to SσN [f ](0) = −π|SσN [f ](x)| ≤ 10−3, |x| ∈ (0.25, 3)
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
x
[f](x
)
fS
N[f]
(a) Response
−80 −60 −40 −20 0 20 40 60 800
0.5
1
1.5
2
2.5
3
3.5
k
σ(k)
(b) Conc. Factor
Figure: Problem Formulation 1, N = 64
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
x
[f](x
)
fS
N[f]
(a) Response
−80 −60 −40 −20 0 20 40 60 800
0.5
1
1.5
2
2.5
3
k
σ(k)
(b) Conc. Factor
Figure: Problem Formulation 2, N = 64
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
x
[f](x
)
fS
N[f]
(a) Response
−80 −60 −40 −20 0 20 40 60 800
0.5
1
1.5
2
2.5
3
3.5
k
σ(k)
(b) Conc. Factor
Figure: Problem Formulation 3, N = 64Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 18 / 41

Concentration Method Concentration Factors
The Missing Coefficient Problem
Let us assume that mid-range Fourier coefficients are missing (eg., modes |30− 40|for N = 64).
Since the response and kernel are real, we assume that both f(±p) are missing.
Use of the standard concentration factors results in spurious oscillations in smoothregions.
−4 −3 −2 −1 0 1 2 3 4−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
[f](x
)
fS
N[f]
(a) Response – Trigonometric factor
−4 −3 −2 −1 0 1 2 3 4−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
[f](x
)
fS
N[f]
(b) Response – Exponential factor
Figure: Jump approximation with Fourier modes |30− 40| missing, N = 64
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 19 / 41

Concentration Method Concentration Factors
Design for Missing Spectral Coefficients
Choose a template function f , eg. the sawtooth function
f(x) =
x−π
2x < 0
x+π2
x > 0[f ](x) =
−π x = 00 else
Explicitly set f(k)˛30≤|k|≤40
= 0.
Design σ such that SσN [f ](x) = i
NXk=−N
f(k) sgn(k)σ
„|k|N
«eikx closely matches
[f ].
Use the standard problem formulation
minσ
φ0(σ)
subject to φm(σ) = cm,
ψn(σ) ≤ cn
where cm, cn are constants and the objective and constraints are typically normmeasures or the conjugate partial sum evaluated at certain points/intervals in thedomain.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 20 / 41

Concentration Method Concentration Factors
An Example
minσ
‖ [f ]− SσN [f ] ‖1
subject to SσN [f ](0) = −πσ(η) ≥ 0
|SσN [f ](x)| ≤ 10−3, |x| ∈ (0.25, 3)
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
x
[f](x
)
fS
N[f]
(a) Response
−80 −60 −40 −20 0 20 40 60 800
0.5
1
1.5
2
2.5
3
k
σ(k)
(b) Conc. Factor
Figure: Jump detection with missing spectral data, N = 64
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 21 / 41

Concentration Method Statistics
Edge detection in noisy data (Viswanathan, Cochran, Gelb, Cates)
Typically, building an edge detector out of the jump approximation requirescomparing the jump function SN [f ] against a threshold
However, the jump approximations have unique characteristics - mainlobe width,sidelobe oscillations etc.
Under these circumstances, when deciding whether a point is an edge, it isadvantageous to take into consideration measurements in the vicinity of the point
In the presence of noise, we have to additionally weight the measurements by acovariance matrix
The final form of the detector (assuming additive white Gaussian noise in Fourierspace) is a weighted inner product of the form
MTC−1V Y > γ
where Y is the vector of noisy jump function measurements, M is a template orjump response (noiseless) to a single step edge, CV is the covariance matrix and γ isa threshold.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 22 / 41

Concentration Method Statistics
The Details
Assume zero-mean, additive complex white Gaussian noise
g(k) = f(k) + v(k) v(k) ∼ N [0, ρ2]
Concentration method is linear, i.e., SσN [g](x) = SσN [f ](x) + SσN [v](x)
Mean: E [SσN [g](x) ] = SσN [f ](x)
Covariance: (Cv)xa,xbp,q = ρ2
Xl
σp(|l|N
)σq(|l|N
)eil(xa−xb)
The detection problem is
H0 : Y = V ∼ N [0, CV]
H1 : Y = M + V ∼ N [M,CV]
Solve using Neyman-Pearson Lemma
→ H1 :Pr(Y|H1)
Pr(Y|H0)> γ
Detector is a generalized matched filter → H1 : MTC−1V Y > γ
MTC−1V M is the “SNR” metric and governs detector performance
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 23 / 41
Concentration Method Statistics
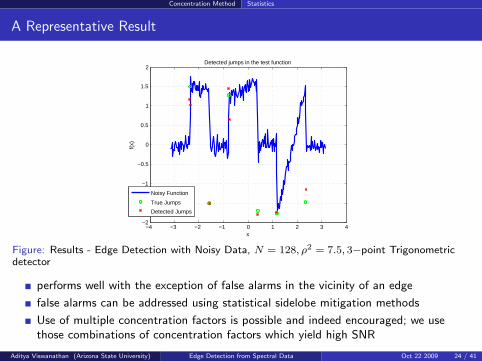
A Representative Result
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Detected jumps in the test function
Noisy Function
True Jumps
Detected Jumps
Figure: Results - Edge Detection with Noisy Data, N = 128, ρ2 = 7.5, 3−point Trigonometricdetector
performs well with the exception of false alarms in the vicinity of an edge
false alarms can be addressed using statistical sidelobe mitigation methods
Use of multiple concentration factors is possible and indeed encouraged; we usethose combinations of concentration factors which yield high SNR
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 24 / 41

Concentration Method Iterative Formulations
In Search of Precise Jump Locations (Stefan, Viswanathan, Gelb, Renaut)
Jump approximations using the concentration method are computed using a Fourierpartial sum.
Since the jump function is piecewise-analytic, this approximation suffers fromconvergence issues.
In particular, the jump has a minimum, non-zero resolution and there are spuriousresponses in smooth regions.
Non Linear Post-processing
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
1.5
x
f(x)
Function
Jump function
(a) The minmod response
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
1.5
x
f(x)
Function
Jump function
(b) Enhancement of scales
Figure: Non-linear post-processing of the jump approximation
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 25 / 41

Concentration Method Iterative Formulations
Problem Formulation
In setting up our iterative formulations,
We will take inspiration from sparsity enforcing regularization routines and theiriterative solutions (Tadmor and Zou).
We will exploit the characteristic responses of the concentration factors in ourproblem formulation.
We may writeSσN [f ](x) = (f ∗Kσ
N )(x) ≈ ([f ] ∗WσN )(x)
SσN [f ] is the jump approximation computed using the concentration method andconcentration factor σ(η).
WσN is the characteristic response to a unit jump using the concentration factor σ(η).
Iterative Problem Formulation
minp
‖Wp− SN [f ] ‖22 + λ‖ p ‖1
where W is a Toeplitz matrix containing shifted replicates of the characteristic response.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 26 / 41

Concentration Method Iterative Formulations
Representative Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
FunctionJump function
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
1.5
x
f(x)
Function
Jump function
Figure: Jump detection – Iterative Formulation (N = 40, Exponential factor)
Works well with even a small number of measurements
Works with missing coefficients and non-harmonic Fourier coefficients, i.e.,
f(ωk) :=1
2π
Z π
−πf(x)e−iωkxdx
Can be extended to blurred data (g = f ∗ h+ n) by modifying the problemformulation
minp
‖H ·W · p− SN [g] ‖22 + λ‖ p ‖1
where H is a Toeplitz matrix containing shifted replicates of the blur or psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 27 / 41

Concentration Method Iterative Formulations
Representative Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blurred function
Edges
Blur
−3 −2 −1 0 1 2 3−1
−0.5
0
0.5
1
1.5
x
f(x)
Function
Blurred function
Edges
Blur
Figure: Jump detection – Iterative Formulation (N = 128, Exponential factor, Gaussian Blur)
Works well with even a small number of measurements
Works with missing coefficients and non-harmonic Fourier coefficients, i.e.,
f(ωk) :=1
2π
Z π
−πf(x)e−iωkxdx
Can be extended to blurred data (g = f ∗ h+ n) by modifying the problemformulation
minp
‖H ·W · p− SN [g] ‖22 + λ‖ p ‖1
where H is a Toeplitz matrix containing shifted replicates of the blur or psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 27 / 41

Applications
Outline
1 IntroductionMotivationProblem Statement
2 Jump detection using the Concentration methodThe Concentration MethodConcentration FactorsStatistical Analysis of the Concentration MethodIterative Formulations
3 ApplicationsPSF Estimation in Blurring ProblemsApplications to Fourier Reconstruction
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 28 / 41

Applications PSF Estimation
Convolutional Blurring (Viswanathan, Stefan, Cochran, Gelb, Renaut)
Often, the input data we observe has been subjected to a distorting physical processduring measurement, transmission or instrumentation.
A large class of these distortions can be explained using a convolutional blurringmodel.
Corrective actions often require an accurate estimate of the distortion or blur.
The convolutional blurring model can be written as
g = f ∗ h+ n
f is the true function
h is the blur or the point-spread function (psf)
n is noise
g is the observed function
Let f ∈ L2(−π, π) be piecewise-smooth. We estimate the psf starting with 2N + 1blurred Fourier coefficients g(k), k = −N, ..., N .
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 29 / 41

Applications PSF Estimation
PSF Estimation using Edge Detection
Given the blurring modelg = f ∗ h+ n
Principle:Apply a linear edge detector. We shall assume that the edge detector can be written as aconvolution with an appropriate kernel
SσN [g] = T (f ∗ h+ n)
= (f ∗ h+ n) ∗K= f ∗ h ∗K + n ∗K= (f ∗K) ∗ h+ n ∗K≈ [f ] ∗ h+ n
Hence, we observe shifted and scaled replicates of the psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 30 / 41

Applications PSF Estimation
PSF Estimation using Edge Detection
Given the blurring modelg = f ∗ h+ n
Principle:Apply a linear edge detector. We shall assume that the edge detector can be written as aconvolution with an appropriate kernel
SσN [g] = T (f ∗ h+ n)
= (f ∗ h+ n) ∗K= f ∗ h ∗K + n ∗K= (f ∗K) ∗ h+ n ∗K≈ [f ] ∗ h+ n
Hence, we observe shifted and scaled replicates of the psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 30 / 41

Applications PSF Estimation
PSF Estimation using Edge Detection
Given the blurring modelg = f ∗ h+ n
Principle:Apply a linear edge detector. We shall assume that the edge detector can be written as aconvolution with an appropriate kernel
SσN [g] = T (f ∗ h+ n)
= (f ∗ h+ n) ∗K= f ∗ h ∗K + n ∗K= (f ∗K) ∗ h+ n ∗K≈ [f ] ∗ h+ n
Hence, we observe shifted and scaled replicates of the psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 30 / 41

Applications PSF Estimation
PSF Estimation using Edge Detection
Given the blurring modelg = f ∗ h+ n
Principle:Apply a linear edge detector. We shall assume that the edge detector can be written as aconvolution with an appropriate kernel
SσN [g] = T (f ∗ h+ n)
= (f ∗ h+ n) ∗K= f ∗ h ∗K + n ∗K= (f ∗K) ∗ h+ n ∗K≈ [f ] ∗ h+ n
Hence, we observe shifted and scaled replicates of the psf.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 30 / 41

Applications PSF Estimation
Example (No Noise)
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
(a) True function
−3 −2 −1 0 1 2 3−0.2
0
0.2
0.4
0.6
0.8
1
1.2
x
h(x)
(b) Gaussian Blur PSF
−3 −2 −1 0 1 2 3−1.5
−1
−0.5
0
0.5
1
1.5
2
x
g(x)
(c) Blurred Function
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blur after edge detection
True blur (normalized)
(d) After applying edge detection
Figure: Function subjected to Gaussian blur, N = 128
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 31 / 41

Applications PSF Estimation
Example (No Noise)
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
(a) True function
−3 −2 −1 0 1 2 3−0.5
0
0.5
1
1.5
x
h(x)
(b) Motion Blur PSF
−3 −2 −1 0 1 2 3−1.5
−1
−0.5
0
0.5
1
1.5
x
g(x)
Blurred Function
(c) Blurred Function
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blur after edge detection
True blur (normalized)
(d) After applying edge detection
Figure: Function subjected to motion blur, N = 128
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 31 / 41

Applications PSF Estimation
Representative Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blurred, noisy function
Blur after edge detection
True blur (normalized)
(a) Noisy blur estimation
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blurred, noisy function
Blur after edge detection
True blur (normalized)
(b) After low-pass filtering
Figure: Function subjected to Gaussian blur, N = 128
Noise distribution – n ∼ CN (0, 1.5(2N+1)2
)
Second picture subjected to low-pass (Gaussian) filtering
It is conceivable that the parameter estimation can take into account the effect ofGaussian filtering
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 32 / 41

Applications PSF Estimation
Representative Examples
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blurred, noisy function
Blur after edge detection
True blur (normalized)
(a) Noisy blur estimation
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
Blurred, noisy function
Blur after edge detection
True blur (normalized)
(b) After TV denoising
Figure: Function subjected to Motion blur, N = 128
Cannot perform conventional low-pass filtering since blur is piecewise-smooth
We compute the noisy blur estimate SN [g] ≈ [f ] ∗ h+ n ∗KN
Denoising problem formulation
minp
‖ p− SN [g] ‖22 + λ‖Lp ‖1
where L is a derivative matrix.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 32 / 41

Applications Fourier Reconstruction
Fourier Reconstruction of Piecewise-smooth functions
SNf(x) =NX
k=−N
f(k)eikx, f(k) =1
2π
Z π
−πf(x)e−ikxdx
Consequences of Gibbs
Non-uniform convergence – presence of non-physical oscillations in the vicinity ofdiscontinuitiesReduced order of convergence – first order convergence even in smooth regions ofthe reconstruction
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.5
0
0.5
1
1.5
2
x
SN
f(x)
Fourier Reconstruction
TrueFourier
(a) Reconstruction
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−7
−6
−5
−4
−3
−2
−1
0
x
Log 10
|e|
Log Error in Reconstruction
(b) Reconstruction error
Figure: Gibbs Phenomenon, N = 32Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 33 / 41

Applications Fourier Reconstruction
Filtered Fourier Reconstructions
Filtering helps to ameliorate the effects of Gibbs, but does not eliminate it. In fact, itintroduces a smearing artifact in the vicinity of a discontinuity.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.5
0
0.5
1
1.5
2
x
SN
f(x)
Fourier Reconstruction
TrueFourier
(a) Filtered Reconstruction
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−16
−14
−12
−10
−8
−6
−4
−2
0
x
Log 10
|e|
Log Error in Reconstruction
(b) Reconstruction error
Figure: Exponentially Filtered Reconstruction, p = 2, N = 64
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 34 / 41

Applications Fourier Reconstruction
Spectral Re-projection (Gottlieb and Shu)
Spectral re-projection schemes were formulated to resolve the Gibbs phenomenon.They involve reconstructing the function using an alternate basis, Ψ (known as aGibbs complementary basis).
Reconstruction is performed using the rapidly converging series
f(x) ≈mXl=0
clψl(x), where cl =〈fN , ψl〉w‖ψl‖2w
, fN is the Fourier expansion of f
Reconstruction is performed in each smooth interval. Hence, we require jumpdiscontinuity locations
High frequency modes of f have exponentially small contributions on the low modesin the new basis
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 35 / 41

Applications Fourier Reconstruction
Spectral Re-projection – An Example
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Gegenbauer reconstruction
(a) Reconstruction
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−16
−14
−12
−10
−8
−6
−4
−2
x
Log
|e|
Log error
N=32
N=64
N=256
(b) Reconstruction error
Figure: Spectral Reprojection Reconstructions
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 36 / 41

Applications Fourier Reconstruction
Non-harmonic Fourier Reconstruction (Viswanathan, Gelb, Cochran, Renaut)
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
(a) Template Function
−30 −20 −10 0 10 20 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
ω
|f(ω
)|
Fourier Transform
(b) Fourier Transform
Figure: A motivating example
Fourier samples violate the quadrature rule for discrete Fourier expansion
Computational issue – no FFT available
Mathematical issue – given these coefficients, can we/how do we reconstruct thefunction?
Resolution – what accuracy can we achieve given a finite (usually small) number ofcoefficients?
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 37 / 41

Applications Fourier Reconstruction
Non-harmonic Fourier Reconstruction (Viswanathan, Gelb, Cochran, Renaut)
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
(a) Template Function
−30 −20 −10 0 10 20 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
ωk
|f(ω
k)|
Fourier Transform
Fourier transformAcquired samples
(b) Fourier Coefficients, N = 32
Figure: A template example
Fourier samples violate the quadrature rule for discrete Fourier expansion
Computational issue – no FFT available
Mathematical issue – given these coefficients, can we/how do we reconstruct thefunction?
Resolution – what accuracy can we achieve given a finite (usually small) number ofcoefficients?
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 37 / 41

Applications Fourier Reconstruction
Non-harmonic Fourier Reconstruction (Viswanathan, Gelb, Cochran, Renaut)
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function
(a) Template Function
−30 −20 −10 0 10 20 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
ωk
|f(ω
k)|
Fourier Transform
Fourier transformAcquired samples
(b) Fourier Coefficients, N = 32
Figure: A template example
Fourier samples violate the quadrature rule for discrete Fourier expansion
Computational issue – no FFT available
Mathematical issue – given these coefficients, can we/how do we reconstruct thefunction?
Resolution – what accuracy can we achieve given a finite (usually small) number ofcoefficients?
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 37 / 41

Applications Fourier Reconstruction
Reconstruction Procedure
1 recover equispaced coefficients f(k)
2 partial Fourier reconstruction using the FFT algorithm
Equispaced coefficients are obtained by inverting a model derived from application of thesampling theorem.
−150 −100 −50 0 50 100 1500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
k
F(k
)
Fourier Coefficients
TrueInterpolated
(a) Recovered Fourier coeffi-cients
−150 −100 −50 0 50 100 150−15
−10
−5
0
k
Log
| E |
Error in Fourier Coefficients
(b) Error in recovered coeffi-cients
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function Reconstruction
True
URS
(c) Filtered reconstruction
Figure: Reconstruction result, N = 128
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 38 / 41

Applications Fourier Reconstruction
Reconstruction Procedure
1 recover equispaced coefficients f(k)
2 partial Fourier reconstruction using the FFT algorithm
Equispaced coefficients are obtained by inverting a model derived from application of thesampling theorem.
30 40 50 60 70 80 90 100 110 120
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
k
F(k
)
Fourier Coefficients
TrueInterpolated
(a) Recovered Fourier coeffi-cients
−150 −100 −50 0 50 100 150−15
−10
−5
0
k
Log
| E |
Error in Fourier Coefficients
(b) Error in recovered coeffi-cients
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function Reconstruction
True
URS
(c) Filtered reconstruction
Figure: Reconstruction result, N = 128
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 38 / 41

Applications Fourier Reconstruction
Incorporating Edge Information
Compute the high frequency modes using the relation
f(k) =Xp∈P
[f ](ζp)e−ikζp
2πik
−3 −2 −1 0 1 2 3−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
f(x)
Function Reconstruction
True
With edge information
(a) Reconstruction - Using edge informa-tion
30 40 50 60 70 80 90 100 110 120 130
−0.02
−0.01
0
0.01
0.02
0.03
kF
(k)
Fourier Coefficients
TrueWith edge information
(b) The high modes - Using edge infor-mation
Figure: Reconstruction of a test function using edge information
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 39 / 41

Summary
Summary
We summarized the concentration method of edge detection.
We looked at routines to design concentration factors.
We showed iterative routines for accurate detection of edges.
We briefly surveyed the statistical properties of concentration edge detection.
We looked at applications of edge detection toPoint spread function estimation in blurring problems.Fourier reconstruction of piecewise-smooth functions – spectral re-projection.Non-harmonic Fourier reconstruction.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 40 / 41

Summary
References
Concentration Method
1 A. Gelb and E. Tadmor, Detection of Edges in Spectral Data, in Appl. Comp.Harmonic Anal., 7 (1999), pp. 101–135.
2 A. Gelb and E. Tadmor, Detection of Edges in Spectral Data II. NonlinearEnhancement, in SIAM J. Numer. Anal., Vol. 38, 4 (2000), pp. 1389–1408.
Statistical Formulation
1 A. Viswanathan, D. Cochran, A. Gelb and D. Cates, Detection of SignalDiscontinuities from Noisy Fourier Data, in Conf. Record of the 42nd Asilomar Conf.on Signals, Systems and Comp., Oct. 2008
Iterative Formulations
1 E. Tadmor and J. Zou, Novel edge detection methods for incomplete and noisyspectral data, in J. Fourier Anal. Appl., Vol. 14, 5 (2008), pp. 744–763.
Spectral Re-projection
1 D. Gottlieb and C.W. Shu, On the Gibbs phenomenon and its resolution, inSIAM Review (1997), pp. 644–668.
Aditya Viswanathan (Arizona State University) Edge Detection from Spectral Data Oct 22 2009 41 / 41


















