Economical stepper motors for speed-control applications
2
Correspondence ECONOMICAL STEPPER MOTORS FOR SPEED-CONTROL APPLICATIONS Indexing terms: Stepping motors, Velocity control Abstract: It is shown that automobile alternators can provide a low-cost alternative to a conventional stepper motor in speed-control applications. Typical performance curves using a transistorised inverter are provided. Introduction: Stepper motors are widely used in industry, and elsewhere, for two principal purposes;position control and speed control. To these ends a wide variety of motors differing in step size, speed, drop-out torque and cost have been developed and marketed. In general the emphasis has been on higher resolution at the expense of speed and cost. Such motors are ideal for operating machine tools and other applications where an accurate position must be maintained for some process time and then changed. In many applications, however, these motors, while suitable, are overdesigned for the purpose. For example, in chemical plants a constant rate of flow through some positive-displacement pump requires a constant-speed motor. The step size is, in this case, largely irrelevant, and significant savings in cost can readily be achieved using lower-resolution motors. Such motors are not usually available from traditional stepper-motor sources, but automobile alternators have been found to be extremely useful and almost universally available. They are available with power ratings up to ~ 1 kW at much lower cost than conventional stepper motors. Description and results: Automobile alternators are usually star-connected 3-phase machines with, commonly, 8 or 12 poles giving 24 or 36 equivalent steps/revolution. To modify an automobile alternator for use as a stepper motor it is only necessary to disconnect the rectifier stack and connect a 3-phase inverter directly to the stator windings. Rotor excitation is conveniently provided using the slip rings on the machine. In explosion-critical environments such external rotor excitation can be dispensed with by replacing the rotor winding with toroidal permanent magnets on a (new) nonmagnetic shaft. A suitable inverter configuration is shown schematically in Fig. 1. In essence this inverter is less complex than that required for a 2- or 4-phase system, as it only requires three 'totem-pole' drivers. Following Nagasaka and Shinohara, 1 constant current excitation has been used, but the implementation, in this case, is rather novel as it uses the inductance of the motor in conjunction with the flywheel diodes and transistors as a high-efficiency switching regulator. Transistors 1—6 are switched in the usual 'quasi-square- wave' or '6-step' sequence described by Miller and Lawrence. 2 The three currents to the motor are monitored using electronic ammeters /,, / 2 , and / 3 . The magnitude of the largest current is selected, and, if this magnitude is above a predetermined level, the whole inverter is turned off until the current drops to slightly below that level. Switching the inverter off and on is accomplished by simply switching whichever of transistors 2, 4, or 6 are active in the 6-step sequence. The hysteresis in the current level at which switching occurs is chosen to ensure that the on/off switching rate is kept well into the ultrasonic area where it is not aurally objectionable. ELECTRIC POWER APPLICATIONS, FEBRUARY 1979, Vol. 2, No. 1 Measured line voltages and line currents at different motor speeds are shown in Fig. 2. At low speeds the current waveform has the expected form while, at higher speeds, more distortion is present. As discussed by Tal 3 this constant-current excitation maximises the output power for a given thermal dissipation in the motor. These wave- forms, although distorted, are closer approximations to sinusoidal currents than square waves and give close to optimal performance. In practice, with a 25—40 V d.c. busbar, constant motor currents of 10 A can be achieved with d.c. busbar currents of the order of 3—2 A when the motor is unloaded. At higher loads the d.c. current and the maximum line current tend to become more equal. The exact ratio between these currents depends on the d.c. busbar voltage, the inverter switching speed and efficiency, the motor core and I 2 R losses, and the mechanical load. Performance curves for a typical automobile alternator used as a stepper motor driven with a constant current transistorised inverter are shown in Fig. 3. In this case the maximum power output is 180 W at 1800 r/min. The motor has a useful holding torque of 1 -3 Nm and a maximum speed of 2500 r/min. Higher d.c. busbar voltages are effective in increasing the maximum speed and higher (constant) currents increase the holding torque. d.c. busbar «• current select /control ^® A Fig. 1 Schematic diagram of transistorised inverter Transistors T l — T f are any suitable switching transistor (e.g. 2N305 5) The diodes should be fast soft recovery types Conclusions: Automobile alternators are ' designed to operate over a wide range of conditions in a very hostile en- vironment. When they are used as stepping motors they still have these performance characteristics. Coupled with this ruggedness the lower cost of an automobile alternator often means that a complete stepper-motor system (motor 27 0140-1327/79/010027 + 02 $01-50/0
Transcript of Economical stepper motors for speed-control applications

CorrespondenceECONOMICAL STEPPER MOTORS FOR SPEED-CONTROL APPLICATIONS
Indexing terms: Stepping motors, Velocity control
Abstract: It is shown that automobile alternators can provide a low-cost alternative to a conventional steppermotor in speed-control applications. Typical performance curves using a transistorised inverter are provided.
Introduction: Stepper motors are widely used in industry,and elsewhere, for two principal purposes;position controland speed control. To these ends a wide variety of motorsdiffering in step size, speed, drop-out torque and cost havebeen developed and marketed. In general the emphasis hasbeen on higher resolution at the expense of speed and cost.Such motors are ideal for operating machine tools andother applications where an accurate position must bemaintained for some process time and then changed.
In many applications, however, these motors, whilesuitable, are overdesigned for the purpose. For example,in chemical plants a constant rate of flow through somepositive-displacement pump requires a constant-speedmotor. The step size is, in this case, largely irrelevant, andsignificant savings in cost can readily be achieved usinglower-resolution motors. Such motors are not usuallyavailable from traditional stepper-motor sources, butautomobile alternators have been found to be extremelyuseful and almost universally available. They are availablewith power ratings up to ~ 1 kW at much lower cost thanconventional stepper motors.
Description and results: Automobile alternators are usuallystar-connected 3-phase machines with, commonly, 8 or 12poles giving 24 or 36 equivalent steps/revolution. Tomodify an automobile alternator for use as a stepper motorit is only necessary to disconnect the rectifier stack andconnect a 3-phase inverter directly to the stator windings.Rotor excitation is conveniently provided using the sliprings on the machine. In explosion-critical environmentssuch external rotor excitation can be dispensed with byreplacing the rotor winding with toroidal permanentmagnets on a (new) nonmagnetic shaft.
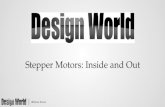
A suitable inverter configuration is shown schematicallyin Fig. 1. In essence this inverter is less complex than thatrequired for a 2- or 4-phase system, as it only requires three'totem-pole' drivers. Following Nagasaka and Shinohara,1
constant current excitation has been used, but theimplementation, in this case, is rather novel as it uses theinductance of the motor in conjunction with the flywheeldiodes and transistors as a high-efficiency switchingregulator.
Transistors 1—6 are switched in the usual 'quasi-square-wave' or '6-step' sequence described by Miller andLawrence.2 The three currents to the motor are monitoredusing electronic ammeters / , , /2, and /3. The magnitudeof the largest current is selected, and, if this magnitude isabove a predetermined level, the whole inverter is turnedoff until the current drops to slightly below that level.Switching the inverter off and on is accomplished by simplyswitching whichever of transistors 2, 4, or 6 are active inthe 6-step sequence. The hysteresis in the current level atwhich switching occurs is chosen to ensure that the on/offswitching rate is kept well into the ultrasonic area where itis not aurally objectionable.
ELECTRIC POWER APPLICATIONS, FEBRUARY 1979, Vol. 2, No. 1
Measured line voltages and line currents at differentmotor speeds are shown in Fig. 2. At low speeds the currentwaveform has the expected form while, at higher speeds,more distortion is present. As discussed by Tal3 thisconstant-current excitation maximises the output powerfor a given thermal dissipation in the motor. These wave-forms, although distorted, are closer approximations tosinusoidal currents than square waves and give close tooptimal performance.
In practice, with a 25—40 V d.c. busbar, constant motorcurrents of 10 A can be achieved with d.c. busbar currentsof the order of 3—2 A when the motor is unloaded. Athigher loads the d.c. current and the maximum line currenttend to become more equal. The exact ratio between thesecurrents depends on the d.c. busbar voltage, the inverterswitching speed and efficiency, the motor core and I2Rlosses, and the mechanical load.
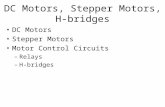
Performance curves for a typical automobile alternatorused as a stepper motor driven with a constant currenttransistorised inverter are shown in Fig. 3. In this case themaximum power output is 180 W at 1800 r/min. The motorhas a useful holding torque of 1 -3 Nm and a maximumspeed of 2500 r/min. Higher d.c. busbar voltages areeffective in increasing the maximum speed and higher(constant) currents increase the holding torque.
d.c. busbar «•
currentselect /control
^ ® A
Fig. 1 Schematic diagram of transistorised inverter
Transistors Tl — Tf are any suitable switching transistor (e.g. 2N305 5)The diodes should be fast soft recovery types
Conclusions: Automobile alternators are ' designed tooperate over a wide range of conditions in a very hostile en-vironment. When they are used as stepping motors theystill have these performance characteristics. Coupled withthis ruggedness the lower cost of an automobile alternatoroften means that a complete stepper-motor system (motor
27
0140-1327/79/010027 + 02 $01-50/0

plus inverter) can be made for less cost than the equivalentstepping motor alone.
Fig. 2 Measured line voltages and line currents for a typicalautomobile alternator at different speedsUpper 60 r/min. middle 300 r/min, lower 1200 r/minThe d.c. busbar is an unregulated supply of 40 VAll current waveforms (upper traces) are 7 A peak
l200
500 1000 1500speed, r/min
2000 2500
Fig. 3 Measured torque and power characteristics of a typicalautomobile alternator type BOSCH 14 V, 35 A (G.M. part number9929209)
Rotor excitation 2 A d.c., busbar voltage 40 VInverter constant current setting 7 A
25th September 1978J.T. BOYSDepartment of Electrical EngineeringUniversity of AucklandAucklandNew Zealand
G.R. DUNLOP
Department of Electrical EngineeringUniversity of CanterburyChristchurchNew Zealand
References
1 NAGASAKA, M., and SHINOHARA, K.: 'A study of largecapacity electric pulse motors', Electr. Eng. Jpn., 1974, 94, pp.101-109
2 MILLER, D.W., and LAWRENCE, R.G.: 'Variable-frequencyinverter and its application to motor drives', Electron. & Power,1976, 22, pp. 675-678
3 TAL, J.: 'Control modes of step motors', IEEE Trans., 1977,AES-13, pp. 56-61
T284P
28 ELECTRIC POWER APPLICATIONS, FEBRUARY 1979, Vol. 2, No. I