ECE 645 { Hypothesis Testing - Purdue Engineeringjvk/645/645lectures/2_ece645-lects_SP14.pdf · 2...
50
ECE 645 – Hypothesis Testing J. V. Krogmeier February 10, 2014 Contents 1 Hypothesis Testing / Detection Setup 4 2 Bayesian Hypothesis Testing 6 2.1 Derivation of the Bayes rule for M =2 ................... 8 2.2 Other forms for the Bayes rule for M =2 .................. 13 2.3 Bayes ⇔ Minimum Prob. of Error for Uniform Costs ........... 14 2.4 Interpretation as Posterior Costs ...................... 15 2.5 Example: Location Testing with Gaussian Error .............. 17 1
Transcript of ECE 645 { Hypothesis Testing - Purdue Engineeringjvk/645/645lectures/2_ece645-lects_SP14.pdf · 2...

ECE 645 – Hypothesis Testing
J. V. Krogmeier
February 10, 2014
Contents
1 Hypothesis Testing / Detection Setup 4
2 Bayesian Hypothesis Testing 6
2.1 Derivation of the Bayes rule for M = 2 . . . . . . . . . . . . . . . . . . . 8
2.2 Other forms for the Bayes rule for M = 2 . . . . . . . . . . . . . . . . . . 13
2.3 Bayes ⇔ Minimum Prob. of Error for Uniform Costs . . . . . . . . . . . 14
2.4 Interpretation as Posterior Costs . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Example: Location Testing with Gaussian Error . . . . . . . . . . . . . . 17
1

2.6 Example: Location Testing with Gaussian Error for IID Case . . . . . . . 19
2.7 Example: Non-Gaussian . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Neyman-Pearson Hypothesis Testing 26
3.1 Example: A common sense argument for NP solution . . . . . . . . . . . 28
3.2 The Neyman-Pearson Lemma . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Proof of the Neyman-Pearson Lemma . . . . . . . . . . . . . . . . . . . . 30
3.4 Example: Location Testing with Gaussian Error . . . . . . . . . . . . . . 43
3.5 Example: Discrete Detection . . . . . . . . . . . . . . . . . . . . . . . . 48
Hypothesis Testing 2
1 Hypothesis Testing / Detection Setup
• Y is the observation, i.e., a real number, a vector, a waveform, an image, etc.
• Γ is the observation set, i.e., Y is a random element of Γ.
• G is the class of observation events, a sigma-algebra.
Taken together, these make up the observation space (Γ,G). In hypothesis testing
the hypothesis corresponds to a probability measure on (Γ,G).
Hypothesis Testing: On observing Y = y we would like to decide among a finite number
(say M) of “states of nature” ... M possible hypotheses about the statistical behavior of
Y .
Take M = 2 and call our two hypotheses H0 and H1 corresponding to two possible
distributions P0 and P1 for the observation Y . These are probability distributions on
(Γ,G).
H0 : Y ∼ P0 (the null hypothesis)
versus
H1 : Y ∼ P1 (the alternative hypothesis)
Hypothesis Testing 3
A decision rule or hypothesis test δ for H0 versus H1 is any partition of Γ into two sets
Γ0 ∈ G and Γ1 = Γc0
such that we choose Hj when y ∈ Γj where y is our observation of Y .
• Γ0 called acceptance region.
• Γ1 called rejection region or critical region.
Can also look at the decision rule δ as a function on the observation space
δ(y) =
1 y ∈ Γ1
0 y ∈ Γ0,
note that δ(·) is the indicator function of the set Γ1.
Goal: To choose the decision rule δ is some optimal way.
Hypothesis Testing 4
2 Bayesian Hypothesis Testing
• Assume costs: cij = cost incurred by choosing Hi when Hj is true.
Cost matrix =
c00 c01
c10 c11
• More generally a cost function might be defined as C : Λ × Λ → R where here
C(i, j) = cij, Λ = {0, 1}.
• Define the conditional risk associated with a decision rule δ as the expected cost
incurred conditioned on Hj being the true hypothesis. That is:
Rj(δ) = c1jPj(Γ1) + c0jPj(Γ0), j = 0, 1
= Ej{C(δ(Y ), j)}
• Consider the special case of uniform costs where: c00 = c11 = 0 and c01 = c10 = 1
and
R0(δ) = P0(Γ1)
R1(δ) = P1(Γ0) = 1− P1(Γ1).
Suppose that we wanted to simultaneously minimize both of the conditional risks.
Hence for R0 we should make Γ1 as small as possible (say Γ1 = ∅) but this results
Hypothesis Testing 5
inevitably in a large R1. On the other hand, starting from R1 we should like Γ0 to
be as small as possible (say Γ0 = ∅) ... then R0 is large. These requirements conflict
and so we cannot simultaneously minimize.
• A way out is to introduce priors in a Bayesian framework in order to find a single
average criterion for minimization.
• Therefore assume we know the prior probabilities of the two hypotheses (i.e., without
knowledge of the actual observation): πj = the probability with which Hj occurs,
unconditioned on an observation. Note
* π0 + π1 = 1
* π0, π1 ≥ 0
• Define the Bayes risk or average risk as the unconditional expected cost:
r(δ) = π0R0(δ) + π1R1(δ)
= E{EJ{C(δ(Y ), J)}}
where we have defined J to be a discrete rv taking values j = 0, 1 with the probabil-
ities π0 and π1, respectively. We only write it this way to emphasize that the Bayes
risk is the expectation of a conditional expectation an observation made later on in
discussing Bayesian estimation.
Hypothesis Testing 6

• Then define an optimal decision rule for H0 vs. H1 to be one minimizing r(δ). Such
a minimizing rule is called a Bayes rule.
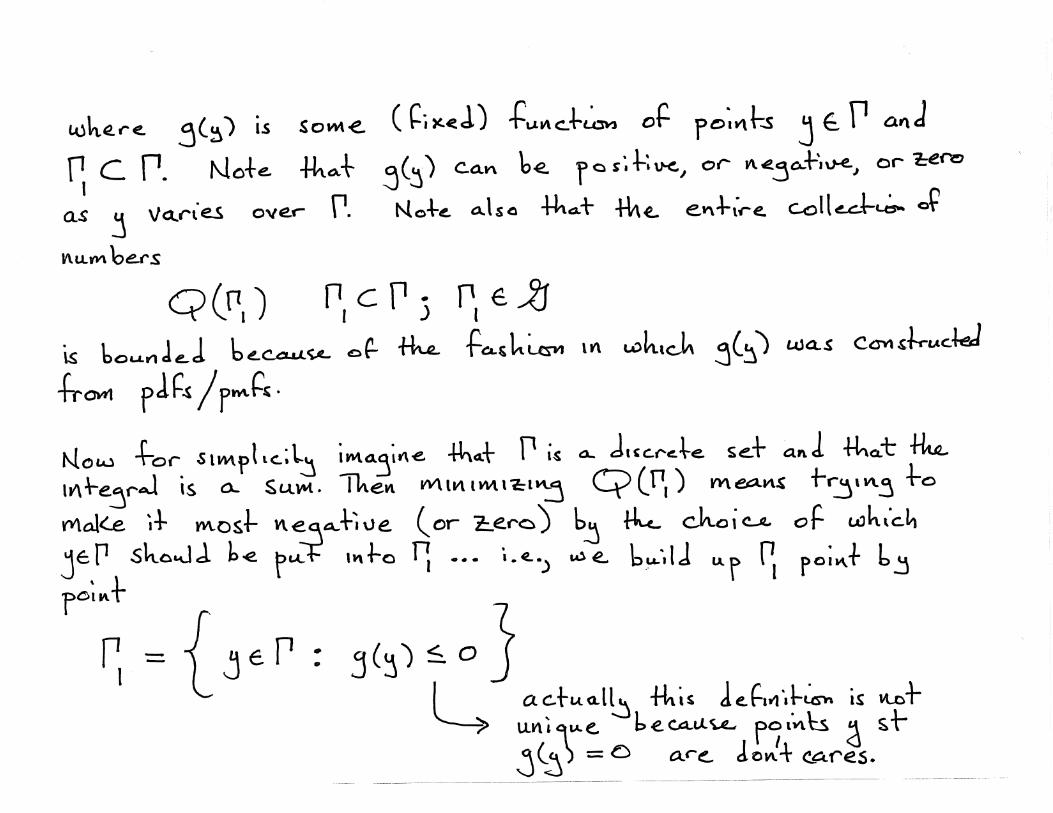
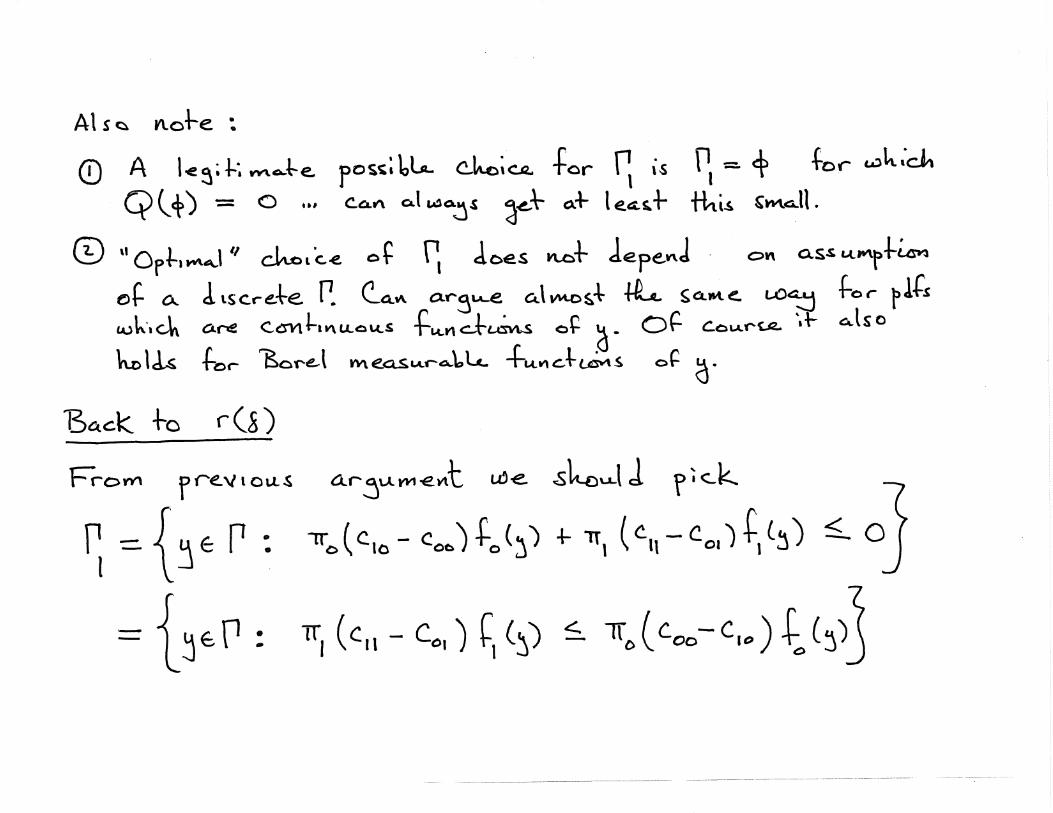
2.1 Derivation of the Bayes rule for M = 2
Hypothesis Testing 7


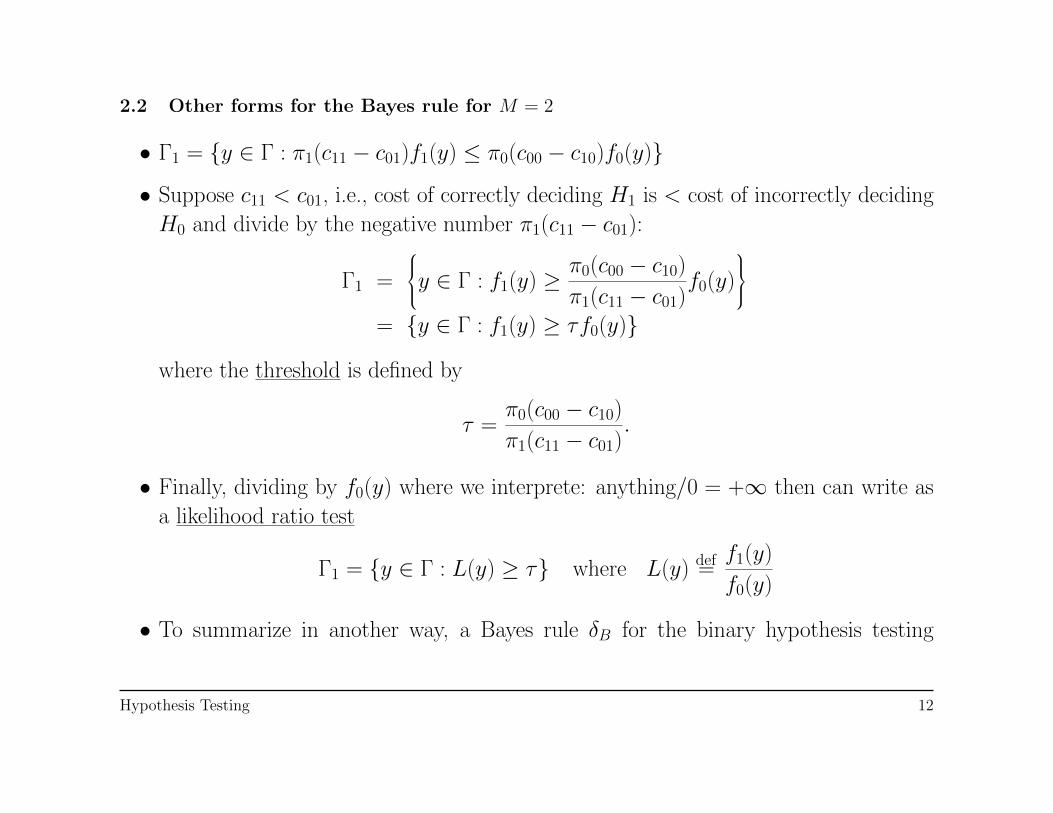
2.2 Other forms for the Bayes rule for M = 2
• Γ1 = {y ∈ Γ : π1(c11 − c01)f1(y) ≤ π0(c00 − c10)f0(y)}
• Suppose c11 < c01, i.e., cost of correctly deciding H1 is < cost of incorrectly deciding
H0 and divide by the negative number π1(c11 − c01):
Γ1 =
y ∈ Γ : f1(y) ≥ π0(c00 − c10)
π1(c11 − c01)f0(y)
= {y ∈ Γ : f1(y) ≥ τf0(y)}
where the threshold is defined by
τ =π0(c00 − c10)
π1(c11 − c01).
• Finally, dividing by f0(y) where we interprete: anything/0 = +∞ then can write as
a likelihood ratio test
Γ1 = {y ∈ Γ : L(y) ≥ τ} where L(y) def=f1(y)
f0(y)
• To summarize in another way, a Bayes rule δB for the binary hypothesis testing
Hypothesis Testing 12
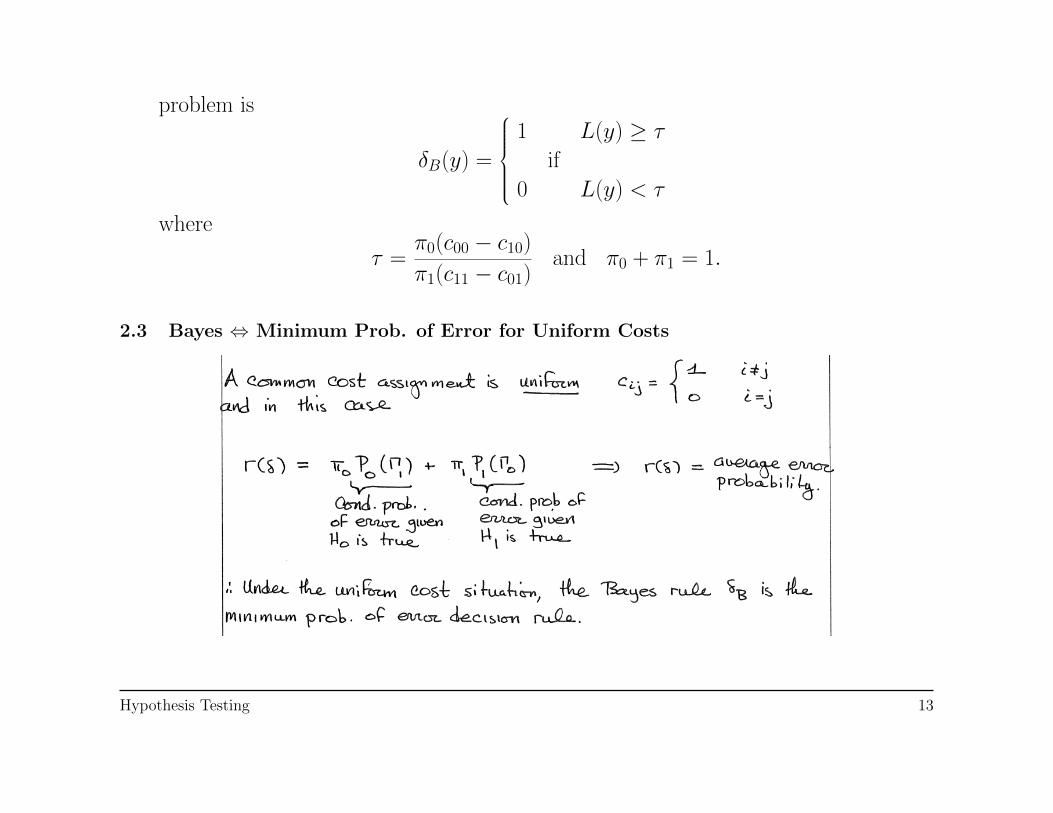
problem is
δB(y) =
1 L(y) ≥ τ
if
0 L(y) < τ
where
τ =π0(c00 − c10)
π1(c11 − c01)and π0 + π1 = 1.
2.3 Bayes ⇔ Minimum Prob. of Error for Uniform Costs
Hypothesis Testing 13
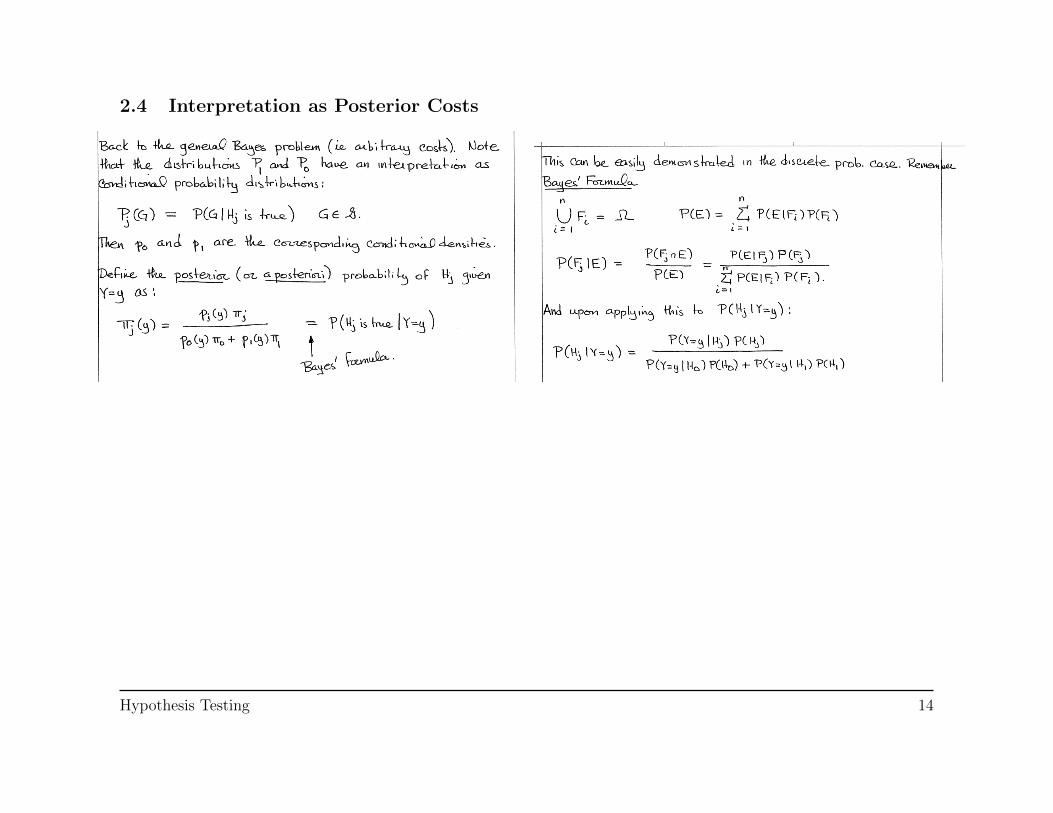
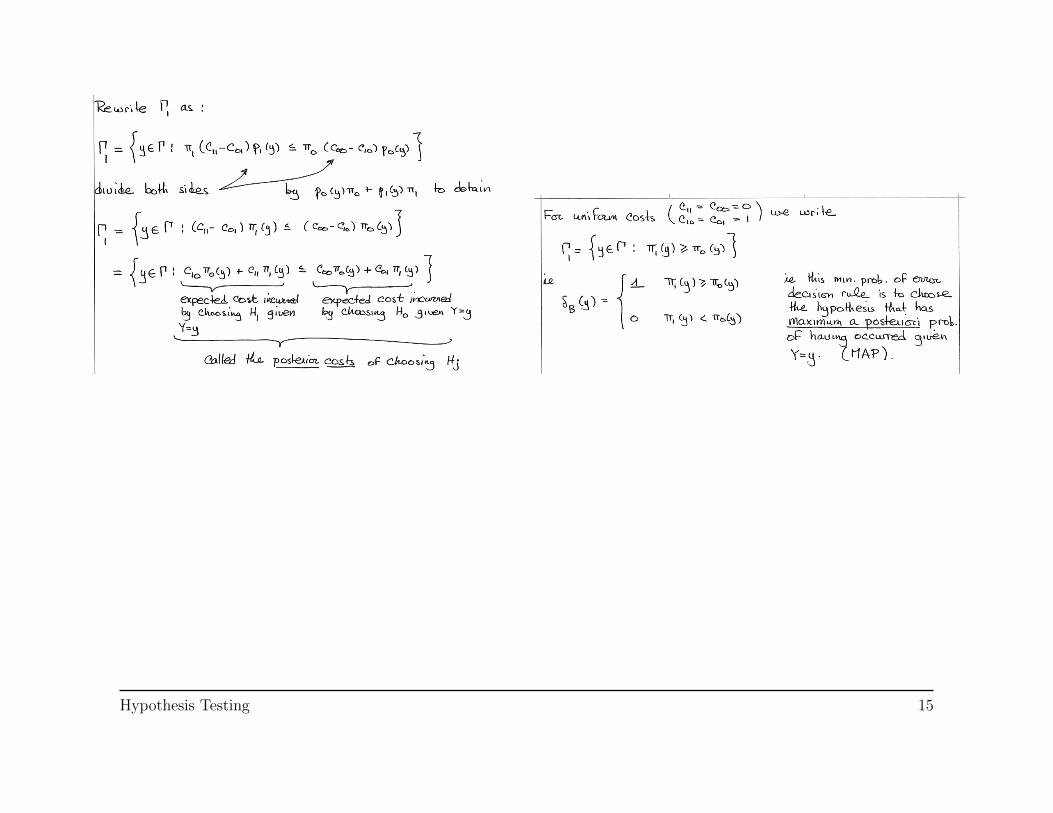
2.4 Interpretation as Posterior Costs
Hypothesis Testing 14
Hypothesis Testing 15

2.5 Example: Location Testing with Gaussian Error
Hypothesis Testing 16
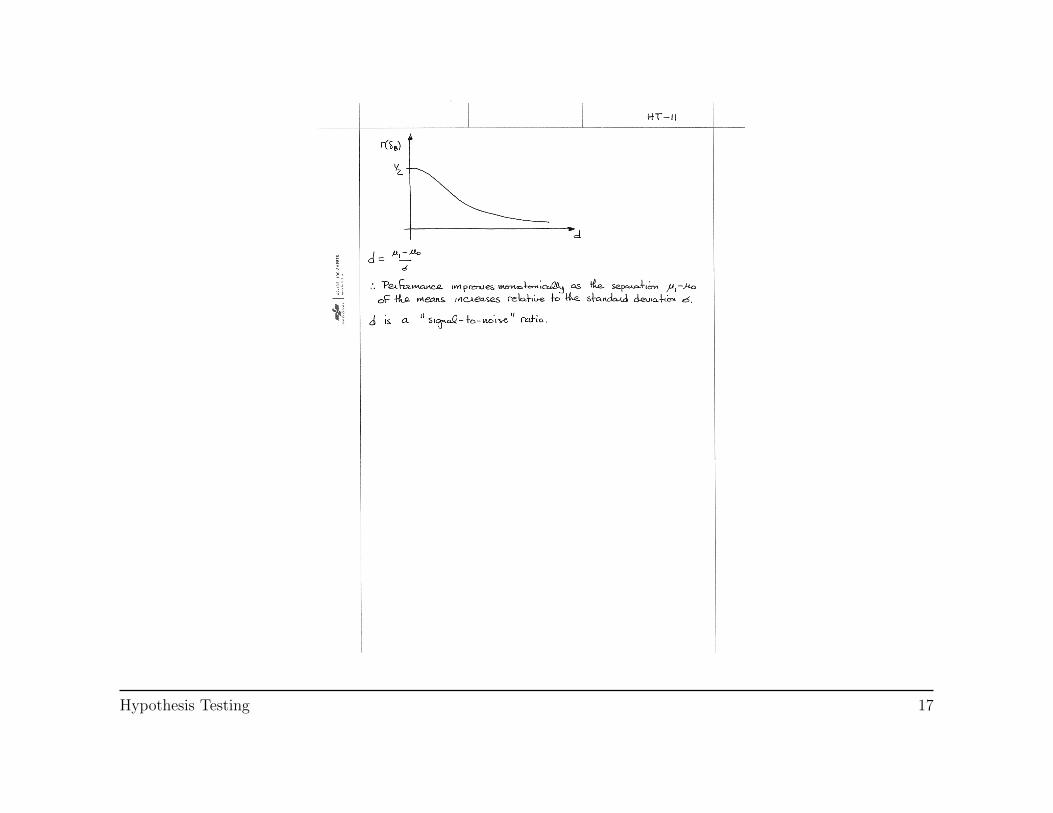
Hypothesis Testing 17

2.6 Example: Location Testing with Gaussian Error for IID Case
Hypothesis Testing 18

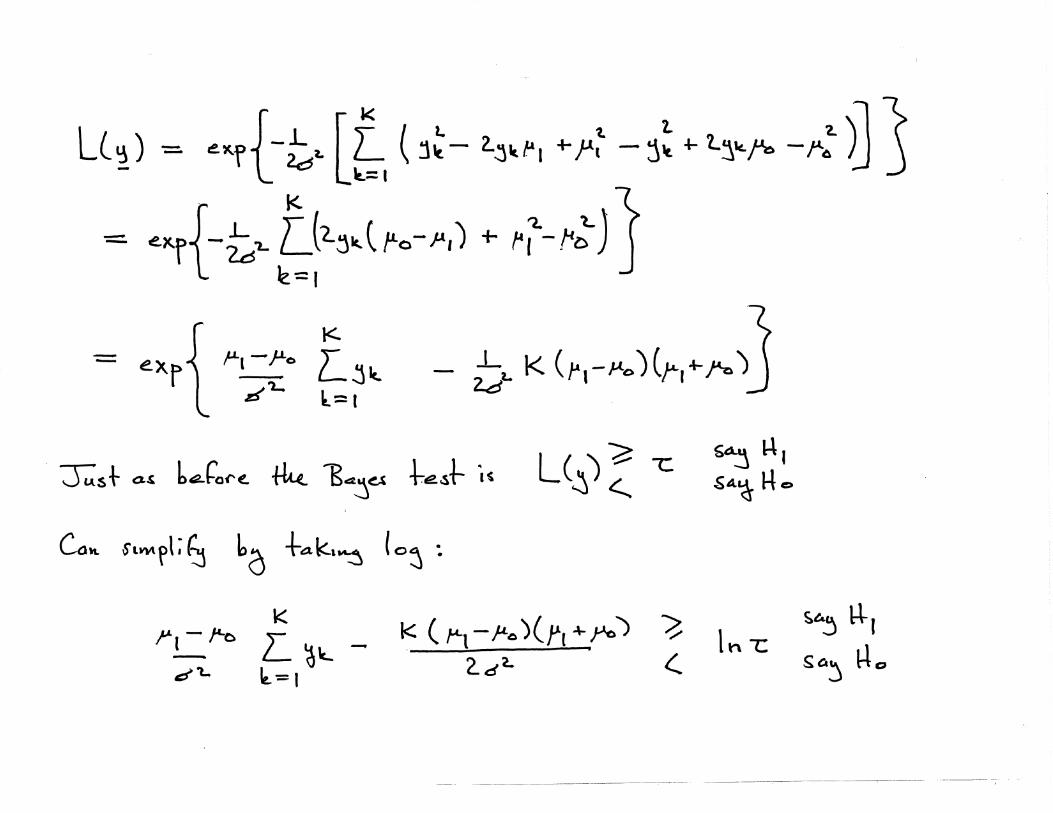

2.7 Example: Non-Gaussian
Hypothesis Testing 22


3 Neyman-Pearson Hypothesis Testing
For many problems, imposition of a specific cost structure is not possible or desirable. NP
design criteria are often imposed in such cases.
• Two types of errors for testing H0 vs. H1
Type I: Choose H1 when H0 is true (False alarm)
Type II: Choose H0 when H1 is true (Miss)
• Correct acceptance of H1 is called a detection.
• For a decision rule δ the probability of a Type I error is known as the size or
false-alarm probability or false-alarm rate of δ. Denoted
PF (δ) def= P0(Γ1) where δ = 1Γ1.
• Similarly the probability of a Type II error is called the miss probability
PM(δ) def= P1(Γ0)
though in radar problems once usually prefers to talk about the detection probability
(which is sometimes called the power of the test δ)
PD(δ) def= P1(Γ1) = 1− PM(δ).
Hypothesis Testing 25
NP criterion is a particular way to design a test for H0 vs. H1 by trading off PF (δ)
and PM(δ). Bayes is just another way to tradeoff. Minimax is another. The NP criterion
maxδPD(δ) subject to PF (δ) ≤ α
where α is a fixed constant (0 ≤ α ≤ 1) called the level or significance level of the test.
One says that
The design goal of NP is to find the most powerful α-level test of H0 vs. H1.
• NP criterion recognizes a basic asymmetry in the importance of the two hypotheses
(in contrast to Bayes and minimax).
• For a general solution to NP problem it is necessary to consider randomized tests.
Define a randomized decision rule δ for H0 vs. H1 as a function mapping Γ to the
unit interval [0, 1] with the interpretation that δ(y) is the conditional probability
with which we accept H1 given that we observe Y = y.
Can of course view non-randomized decision rules as special cases of randomized
rules and therefore we won’t use a different notation for randomized and non-
randomized decision rules.
Hypothesis Testing 26
For a randomized decision rule δ
PF (δ) = E0{δ(Y )} =∫Γδ(y)f0(y)dy
PD(δ) = E1{δ(Y )} =∫Γδ(y)f1(y)dy
which, of course, reduces to the previous definition when the randomized decision
rule is actually non-randomized.
3.1 Example: A common sense argument for NP solution
Can think of NP testing as the setting up of a “preference order” for points y in the
observation space. Equivalently, there is an analogy: Smart student shopper.
Suppose that a student makes a trip to Marsh intending to spend at most α
dollars. The student has two functions in mind
• P0(y) = cost of item y.
• P1(y) = “value” placed on item y (this is subjective, after all, who is to say
that Cheetos are more valuable than Fruitloops).
Let S be the contents of the shopping cart. Then the smart shopping objective
Hypothesis Testing 27
is to choose the items y to include in S such that∑y∈S
P0(y) ≤ α
and ∑y∈S
P1(y) is maximum.
The algorithm to solve this problem is to rate all items in the store according to their
“value per dollar.” Here the most valuable items y are those with the largest value of
L(y) =P1(y)
P0(y).
After ordering items according to L(y) the shopper selects them for S going from highest
L(y) toward lowest until the spending limit α is reached.
3.2 The Neyman-Pearson Lemma
Consider the hypothesis pair with indicated pdfs
H0 : Y ∼ f0
vs.
H1 : Y ∼ f1
and suppose that α > 0. Then the following statements are true.
Hypothesis Testing 28
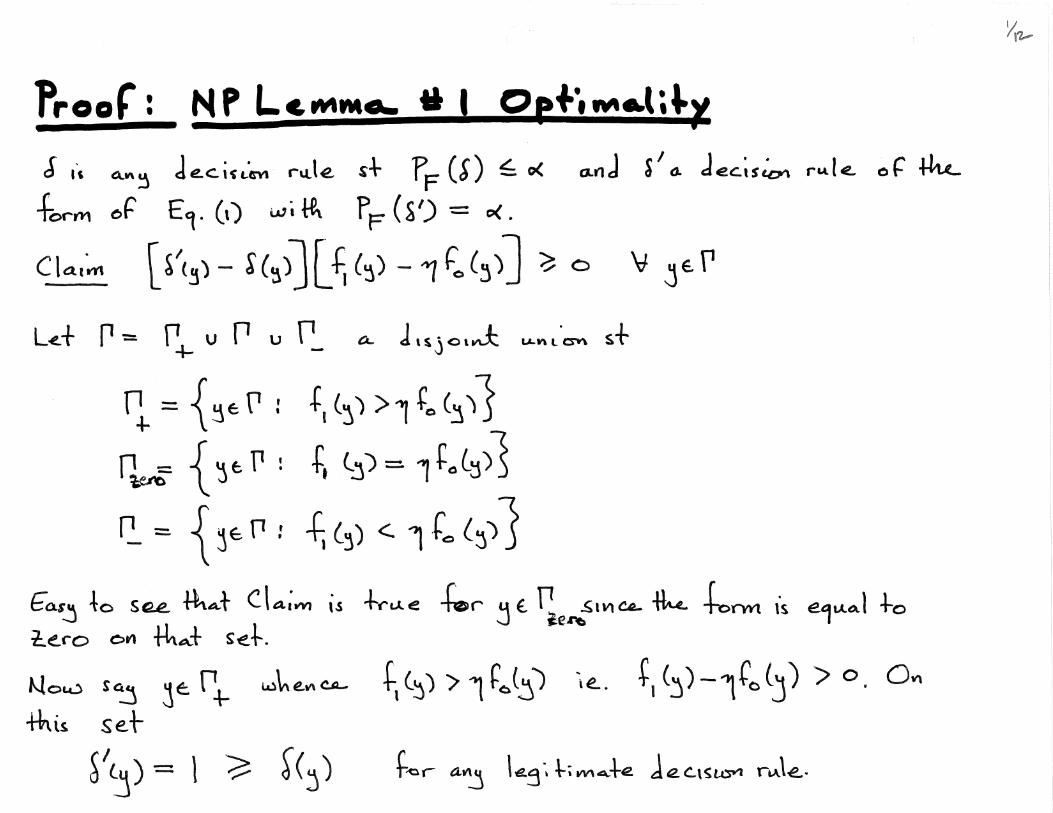
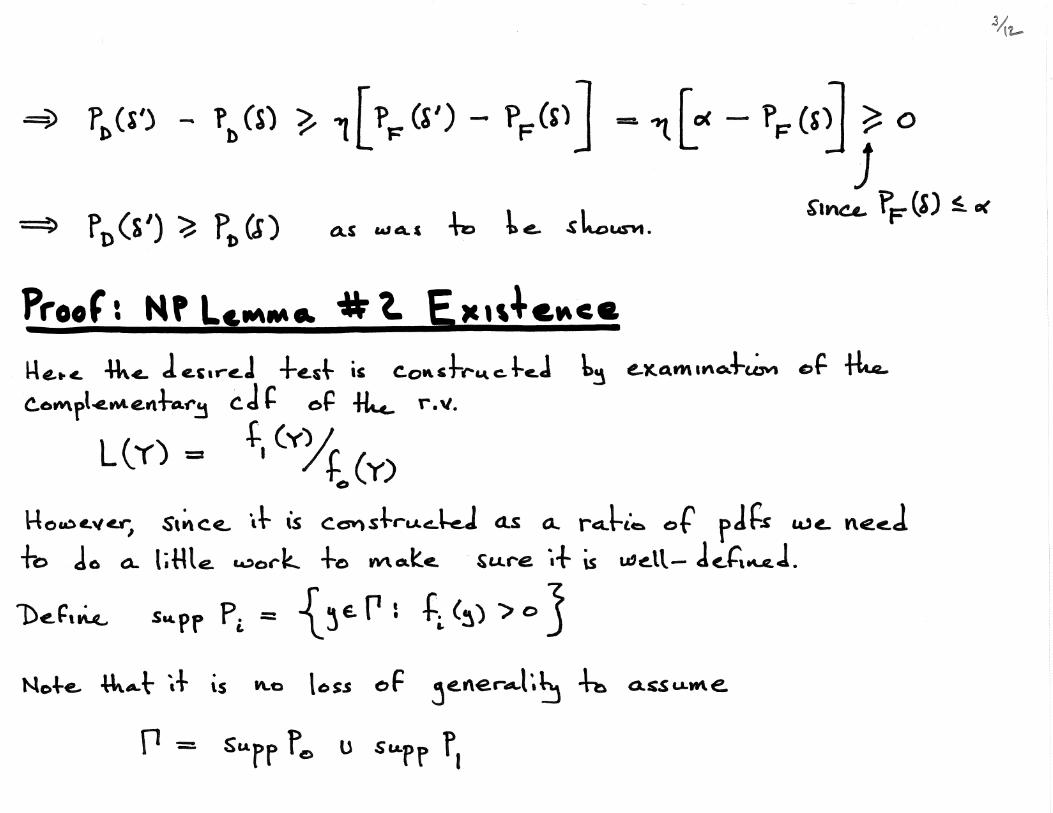
1. (Optimality) Let δ be any decision rule satisfying PF (δ) ≤ α and let δ′ be any decision
rule of the form
δ′(y) =
1 if f1(y) > ηf0(y)
γ(y) if f1(y) = ηf0(y)
0 if f1(y) < ηf0(y)
(1)
where η ≥ 0 and 0 ≤ γ(y) ≤ 1 are such that PF (δ′) = α. Then
PD(δ′) ≥ PD(δ).
That is, any size α decision rule of the form of Eq. (1) is a Neyman-Pearson rule.
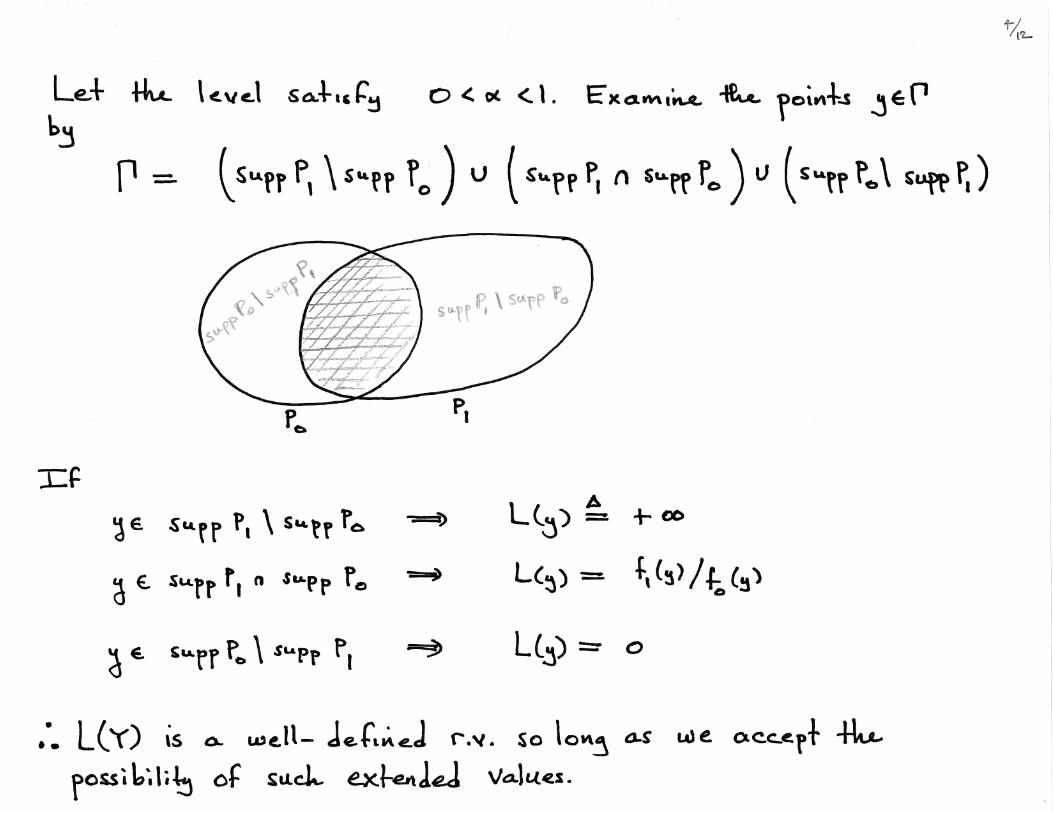
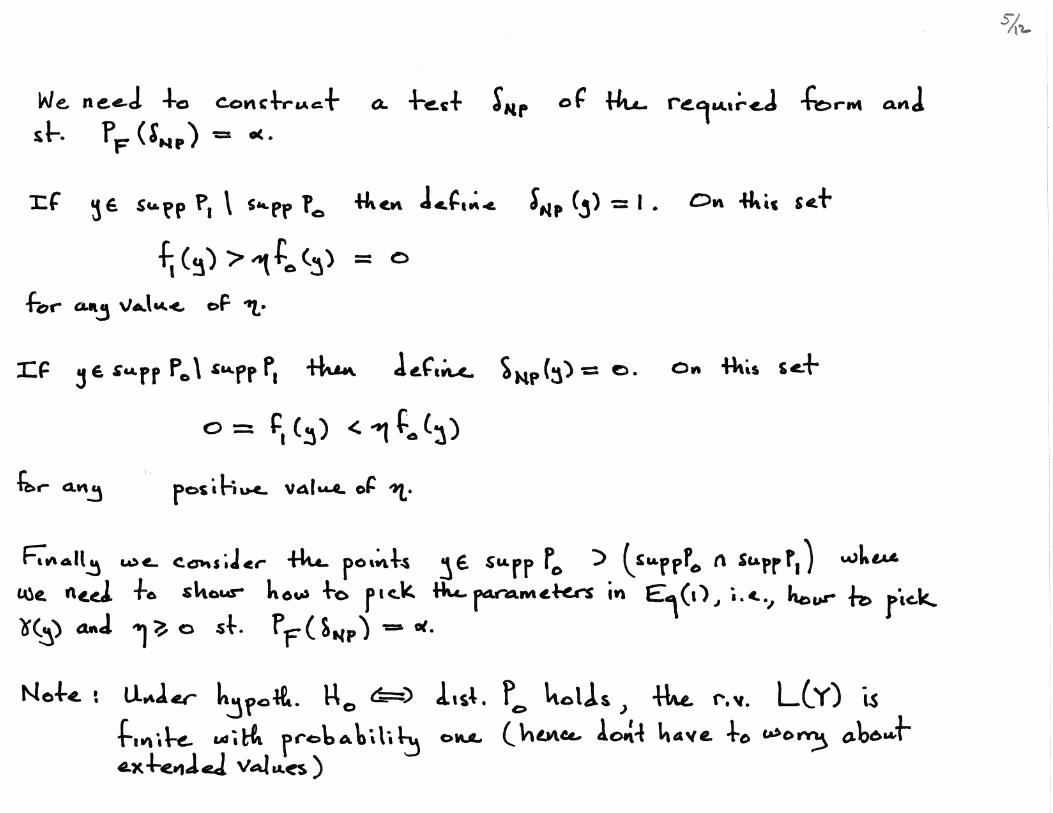
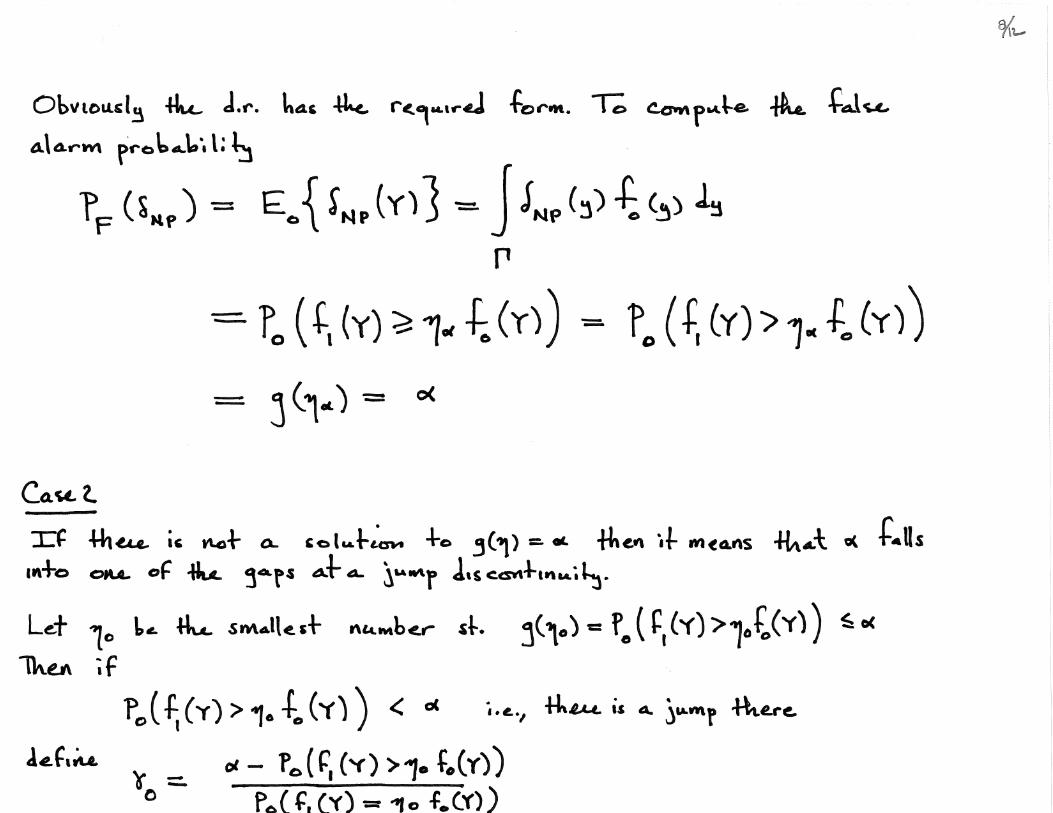
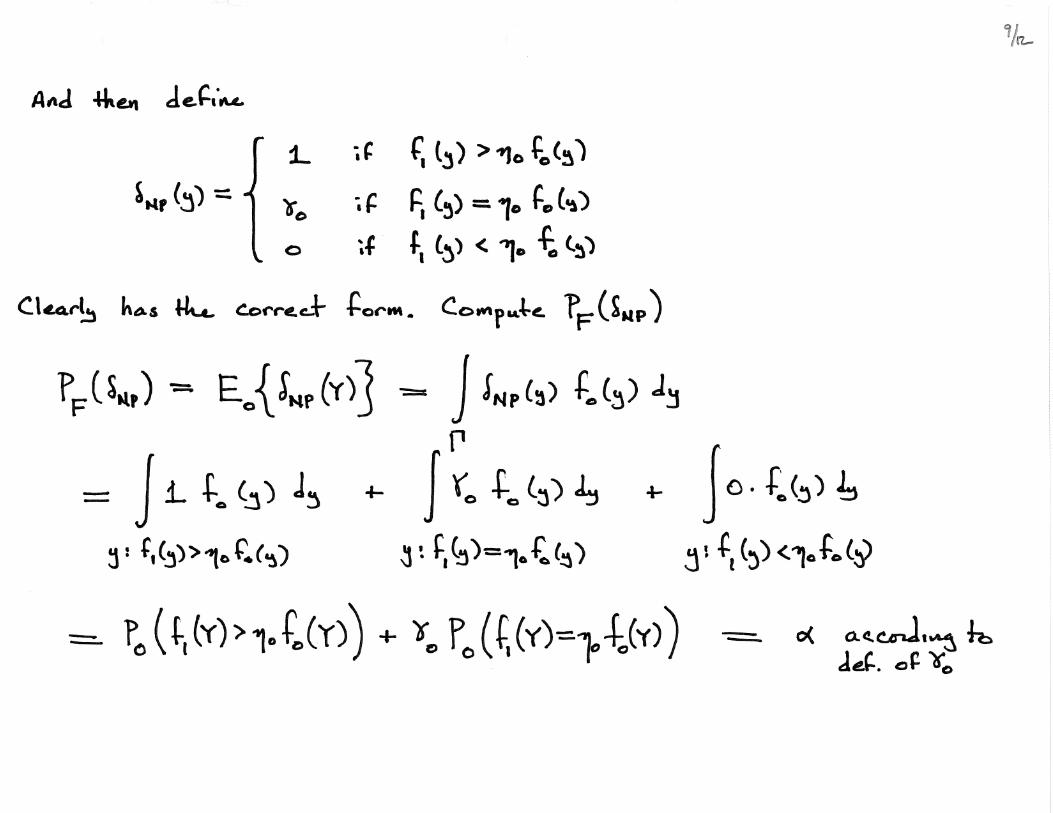
2. (Existence) For every α s.t. 0 < α < 1 there is a decision rule δNP of the form of Eq.
(1) with γ(y) = γ0 (a constant) for which PF (δNP ) = α.
3. (Uniqueness) Suppose that δ′′ is any α-level Neyman-Pearson decision rule for H0 vs.
H1. Then δ′′ must be of the form of Eq. (1) except possibly on a subset of Γ having
zero probability under H0 and H1.
3.3 Proof of the Neyman-Pearson Lemma
Hypothesis Testing 29






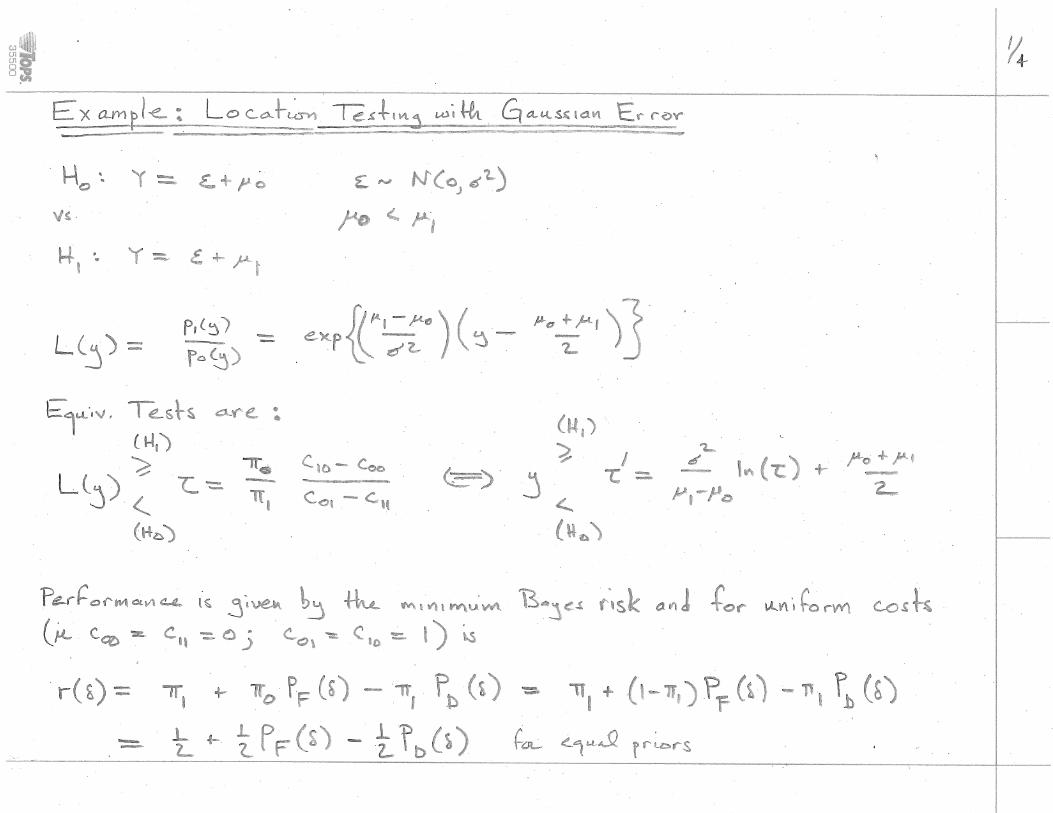
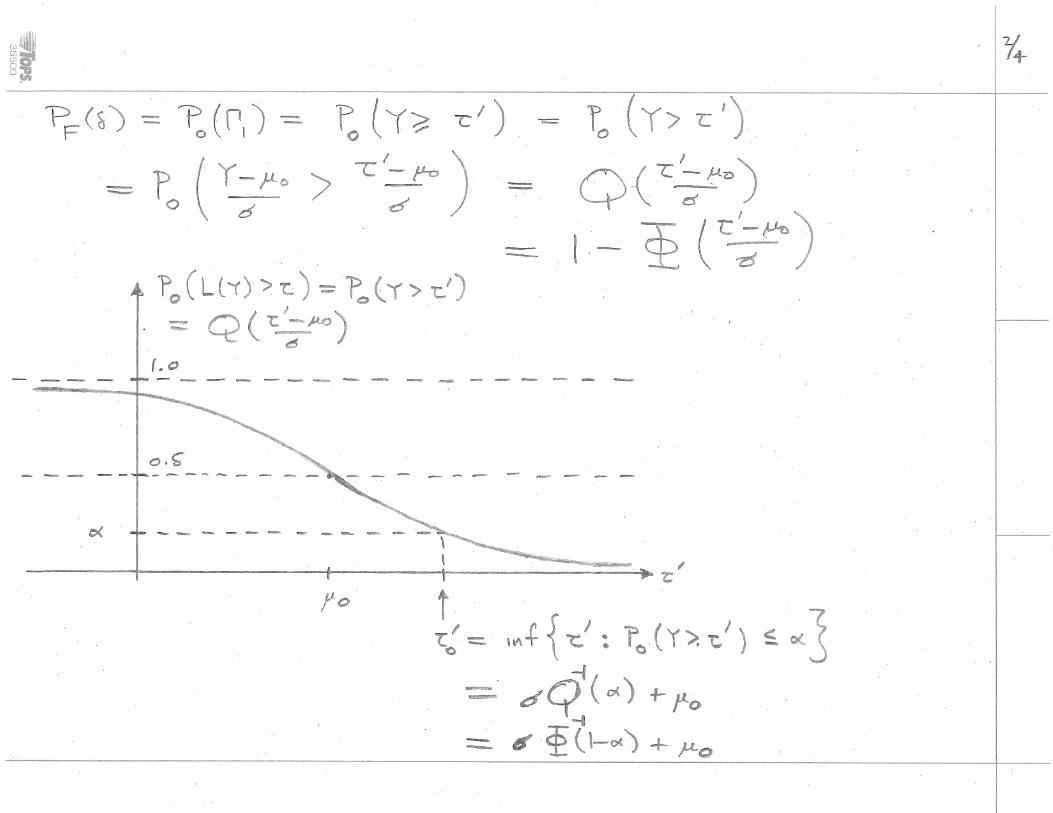
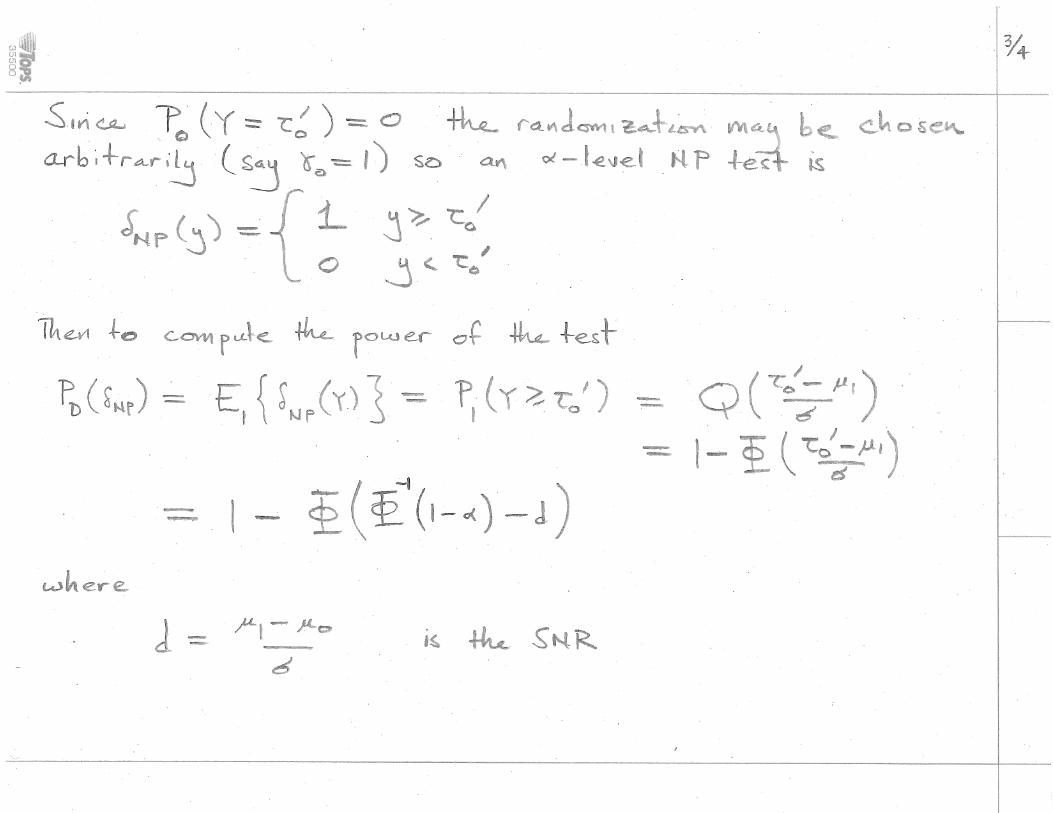
3.4 Example: Location Testing with Gaussian Error
Hypothesis Testing 42

3.5 Example: Discrete Detection
Hypothesis Testing 47