E-book - Equazioni Differenziali

of 105
Transcript of E-book - Equazioni Differenziali
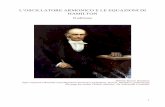
1UNIVERSIT ` A DEGLI STUDI DI FIRENZEDipartimento di Matematica per le DecisioniMetM@tEquazioni DifferenzialiPierLuigi ZezzaVersione 0.9 beta del 1 marzo 20012PierLuigi ZezzaUniversit` a degli Studi di FirenzeDipartimento di Matematica per le DecisioniVia Lombroso 6/17 - 50134 FIRENZE, ITALIATel. +39 055 4796830Fax +39 055 4796800e-mail [email protected]://www.dmd.uni.it/zezzaIndiceIndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 Equazioni differenziali 51.1 Classicazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 Equazioni del primo ordine 92.1 Equazioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Equazioni a variabili separabili . . . . . . . . . . . . . . . . . . . 173 Dinamica delle popolazioni 233.1 Il modello di Malthus . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Crescita esponenziale . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Il modello logistico . . . . . . . . . . . . . . . . . . . . . . . . . 243.4 Esistenza di una soglia critica . . . . . . . . . . . . . . . . . . . . 283.5 Crescita logistica con una soglia critico . . . . . . . . . . . . . . 304 Equazioni del secondo ordine 334.1 Equazioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2 Equazioni omogenee a coefcienti costanti . . . . . . . . . . . . . 354.2.1 Radici reali distinte. . . . . . . . . . . . . . . . . . . . . 354.2.2 Radici reali coincidenti . . . . . . . . . . . . . . . . . . . 364.2.3 Radici complesse. . . . . . . . . . . . . . . . . . . . . . 374.3 Equazioni non omogenee a coefcienti costanti . . . . . . . . . . 374.3.1 Variazione delle costanti . . . . . . . . . . . . . . . . . . 375 Sistemi di equazioni 395.1 Equazioni di ordine superiore e sistemi . . . . . . . . . . . . . . . 395.1.1 Teoremi di esistenza ed unicit` a. . . . . . . . . . . . . . . 405.2 Sistemi lineari. . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.2.1 Struttura dellinsieme delle soluzioni . . . . . . . . . . . 415.2.2 Matrici fondamentali . . . . . . . . . . . . . . . . . . . . 4234 INDICE5.3 Determinazione delle soluzioni . . . . . . . . . . . . . . . . . . . 436 Stabilit` a 556.1 Equazioni differenziali autonome . . . . . . . . . . . . . . . . . . 556.2 Stabilit` a dei sistemi lineari . . . . . . . . . . . . . . . . . . . . . 586.3 Stabilit` a dei sistemi nonlineari . . . . . . . . . . . . . . . . . . . 597 Esercizi 617.1 Equazioni del primo ordine. . . . . . . . . . . . . . . . . . . . . 617.2 Equazioni del secondo ordine . . . . . . . . . . . . . . . . . . . . 647.3 Studio qualitativo . . . . . . . . . . . . . . . . . . . . . . . . . . 668 69Soluzioni degli Esercizi 708.1 Equazioni del primo ordine. . . . . . . . . . . . . . . . . . . . . 708.2 Equazioni del secondo ordine . . . . . . . . . . . . . . . . . . . . 838.3 Studio qualitativo . . . . . . . . . . . . . . . . . . . . . . . . . . 93Elenco delle gure 101Indice analitico 103Bibliograa 105Capitolo 1Equazioni differenzialiQuesta parte rappresenta una breve introduzione alle equazioni differenziali cheha come scopo quello di introdurre il problema, dare allo studenti alcuni semplicitecniche risolutive ed introdurre alcuni metodi di analisi quantitativa che sono digrande importanza nelle applicazioni. Per una rassegna dei metodi risolutivi an-che numerici rimandiamo a [2], per una introduzione allanalisi qualitativa ed alruolo delle equazioni differenziali nella teoria del controllo a [1] mentre per undiscussione di aspetti di rilevanza teorica a [4].ESERCIZIO 1.1. gsdvd1.1 ClassicazioneUna equazione differenziale ` e una equazione la cui incognita ` e una funzione del-la variabile x e che contiene una o pi ` u derivate della funzione incognita; possiamoquindi scriverla comeF(x, (x), D(x), D2(x),. . . ,Dn(x)) = 0. (1.1)Vi sono molti tipi diversi di equazioni differenziali, di seguito, diamo uno schemaper la loro classicazione.Equazioni differenziali ordinarie (EDO).Se la funzione incognita : A R R ` e una funzione di una sola variabileallora parleremo di equazione differenziale ordinaria..Equazioni differenziali alle derivate parziali (EDP).Se la funzione incognita : A Rp R ` e una funzione di p > 1 variabiliallora parleremo di equazione differenziale alle derivate parziali.56 CAPITOLO 1. EQUAZIONI DIFFERENZIALISistemi di equazioni differenziali ordinarie (EDO).Se la funzione incognita: A R Rq` e una funzione a valori vetto-riali q> 1 allora parleremo ancora di equazione differenziale ordinaria o,se vogliamo sottolineare questa loro caratteristica, parleremo di sistema diequazioni differenziali ordinarie .Poich e siamo interessati soltanto allo studio delle equazioni differenziali ordinarie(EDO) introduciamo una terminologia che ci permetta di descrivere alcune lorocaratteristiche.E abitudine indicare con la funzione incognita e con
,
, . . . ,(n)le primen derivate della funzione incognita rispetto ad x e quindi scriveremo lequazione(1.1) comeF(x,
(x),
(x), . . . ,(n)(x)) = 0. (1.2)Chiamiamo ordine di una equazione differenziale il pi` u grande ordine di deriva-zione che appare nellequazione. Nellenunciare teoremi e propriet` a supporremosempre che lequazione (1.2) possa essere scritta in forma normale questo vuoldire che lequazione pu` o essere risolta rispetto alla derivata di ordine massimo equindi lequazione si pu` o scrivere come(n)(x) = f(x,
(x),
(x), . . . ,(n1)(x)). (1.3)Per soluzione dellequazione (1.3) nellintervallo (a, b) intendiamo una funzione : (a, b) R di cui si possano fare le prime n derivate e per cui si abbia(n)(x) = f(x,
(x),
(x), . . . ,(n1)(x)) per ogni x (a, b),in altre parole se sostituiamo la funzione nellequazione otteniamo una identit` afra funzioni denite nellintervallo (a, b).Importante.Ad una soluzione associeremo sempre un intervallo aperto (a, b) nel quale essa` edenitaedove` esoluzionedellequazionedifferenzialechepu` oancheessereillimitato: a = o b = . Chiariamo quanto abbiamo detto con un esempioEsempio. Sia f: R2R data daf: (x, y) x(2 y 1)si tratta di una funzione di due variabili che denisce lequazione differenziale
(x) = f(x, (x)) = x[2 (x) 1]. (1.4)Per x (a, b) = R, la funzione : x 12+c ex2` e una soluzione dellequazione(1.4) cio` e le due funzioni di una variabile reale1.1. CLASSIFICAZIONE 71. x
(x) = 2 xc ex2, ottenuta sostituendo al primo membro nellequa-zione (1.4).2. x x(2 (x) 1) = 2 xc ex2, ottenuta sostituendo al secondo membronellequazione (1.4).sono eguali per ogni x (a, b) = R.Notazioni.Praticamente ogni testo sulle equazioni differenziali utilizza delle notazioni speci-che, in questo testo sono state fatte alcune scelte. La variabili in Rpsono indicatecon lettere dellalfabeto occidentale (x, y, . . . ) mentre le funzioni con quelle del-laalfabeto greco (, , . . . ) o, come avete gi` a fatte con lettere come f, g, p, q, . . . .Molto spesso viene indicata cony la funzione, chiamata variabile dipendente, econ x o spesso t la variabile effettiva, chiamata variabile indipendente. Inoltre noiindichiamo con D, o con lapice, loperatore derivata che spesso ` e indicato condd t.La lettera t viene usata per indicare una variabile reale, t R. Le seguenti scritturesono quindi equivalenti per x.t RD(x) = f(x, (x))
(x) = f(x, (x))y
(x) = f(x, y(x))dd ty(t) = f(t, y(t))e scritture analoghe.Nello studio delle equazioni differenziali dobbiamo essere in grado di rispon-dere a diverse domandeEsistenza. Esiste una soluzione dellequazione differenziale?Unicit` a. Ne esiste una sola o ne esistono molte? In questo secondo casocosa dobbiamo specicare per averne una sola?Calcolabilit` a. Se la soluzione esiste come faccio a trovarla?Nel corso di questa parte impareremo a rispondere ad alcune di queste domandeper alcune classi di EDO.La classicazione fondamentale delle EDO riguarda la loro linearit` a o meno.Diremo che una EDO ` e lineare se F` e una funzione lineare di
,
, . . . ,(n1),ovvero se possiamo scrivere lequazione come(n)(x) +a1(x) (n1)(x) + +an(x) (x) = g(x), (1.5)la chiameremo nonlineare altrimenti.8 CAPITOLO 1. EQUAZIONI DIFFERENZIALICapitolo 2Equazioni del primo ordineIn questo capitolo consideriamo equazioni differenziali del primo ordine in formanormale, ovvero equazioni del tipo
(x) = f(x, (x))dovef: A R2 Rq` e una funzione data. Poich e il nostro obiettivo ` e quel-lodidareunasemplicedescrizionedellesoluzioniinalcuni casi particolaricilimiteremo al caso cosiddetto scalare q = 1.2.1 Equazioni lineariIl tipo pi` u semplice di equazione del primo ordine che possiamo studiare si ottienenel caso in cui la funzionefnon dipenda dalla variabiley e sia quindi una fun-zione della sola variabile x, e quindi f(x, y) =g(x). In questo caso lequazionedifferenziale diventa
(x) = g(x). (2.1)Questo problema` e gi` a stato studiato e corrisponde alla ricerca di una primitivadella funzione g in qualche intervallo I di R. Al problema dellesistenza da una ri-sposta il Teorema fondamentale del calcolo integrale che asserisce che la continuit` adella funzione g sullintervallo I ` e una condizione sufciente per lesistenza di unaprimitiva in quello stesso intervallo e che tutte le primitive differiscono fra di loroper una costante. Se g C(I) allora possiamo scrivere le soluzioni dellequazione(2.1) come : (x, c) _ g(x) dx +c, x I,ovvero : (x, c) _xag(s) ds +c, x I,910 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINEdove a ` e un qualsiasi punto dellintervallo I. Questa seconda espressione della pri-mitiva di una funzione g ci permette anche di determinare un modo per sceglierneuna in particolare: la costante c ` e il valore della primitiva nel punto a ((a, a) = c)e quindi, se ssiamo il valore della primitiva in un puntox0 Ichiedendo che(x0) = y0, allora abbiamo ununica soluzione : (x, x0) _xx0g(s) ds +y0.Al problema di come calcolare la primitiva lo studente ha gi` a dedicato parte delsuo tempo e delle sue energie.Lesempio che abbiamo visto introduce due speciche caratteristiche delle EDO,` e necessaria una integrazione per eliminare la derivata e questo introduce nelle-spressione della soluzione una costante.Non esiste un metodo generale per risol-vere le EDO del primo ordine, in questo capitolo illustreremo alcune tecniche chepermettono di risolverne alcune classi; le questioni riguardanti lesistenza sarannoanalizzate in seguito. EDO lineari del primo ordine.Consideriamo lequazione differenziale ordinaria lineare del primo ordine
(x) +p(x) = g(x). (2.2)Come negli esempi precedenti le soluzioni dipenderanno da un parametro reale c,costante di integrazione e quindi la soluzione sar` a una funzione (x, c) (x, c)ma, per mettere in risalto il ruolo diverso dix ec, la scriveremo comec` e cio` eunafunzionedellavariabilexchedipendedalparametroc.Dalpuntodivistamatematico` e semplicemente una funzione di due variabili ma questa notazionediversa ed i nomi diversi ci permettono di distinguerne il ruolo.Per imparare a risolvere lequazione (2.2) iniziamo da un caso molto partico-lare che ci permetter` a di individuare un metodo risolutivo generale. Consideriamolequazione differenziale
(x) +a (x) = 0; (2.3)il problema consiste quindi nel trovare una funzione la cui derivata ` e la funzionestessa moltiplicata per a. La risposta la conoscete gi` a, la soluzione ` ec : x c ea x, x R,come ` e facile vericare, infatti sostituendo c nellequazione differenziale ottenia-mo
c(x) +a c(x) = a c ea x+a c ea x= 0, x R.Per studiare il comportamento delle soluzioni e il modo con cui variano in funzio-ne del parametroc disegnamo il graco dical variare dic, questi graci sono2.1. EQUAZIONI LINEARI 11descritti dalle curve integrali dellequazione (2.2) e cio` e dalle curvex (x, c(x)), x (a, b)il cui supporto (immagine) ` e il graco di c. Nel nostro esempio, se poniamo a =0.5, otteniamo una famiglia di esponenziali con esponente negativo, gura 2.1 apagina 11. Ogni curva integrale ` e il graco di una soluzione, per individuarne una3210123y2 1 1 2xFigura 2.1: Curve integrali dellequazione (2.3) per a = 0.5in particolare possiamo richiedere che passi per uno specico punto (x0, y0) R2,ovvero richiedere che(x0) = y0,unacondizionedi questotiposi chiamacondizioneiniziale. Se, adesempio,per lequazione (2.3) cerchiamo la soluzione per cui(1)=e, allora dobbiamorichiedere che(1) = c ea= eda cui otteniamo c = e1+ae quindi la soluzione cercata ` e := x e1a(x1).Unequazione differenziale del primo ordine con una condizione iniziale assegnata_
(x) = f(x, (x))(x0) = y0si chiama problema di Cauchy o problema ai valori iniziali notate che il punto(x0, y0) deve appartenere ad A.12 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINEConsideriamo ora lequazione
(x) +a (x) = g(x),e poniamoci la seguente domanda: possiamo scrivere il primo membro di questaequazione come la derivata di qualcosa? Se questo fosse possibile allora avremmoD_
qualcosa
_ = g(x)e potremmo risolvere lequazione integrando ambo i membri dellequazione. Perottenere unespressione di questo tipo moltiplichiamo ambo i membri per ea xedabbiamoea x
(x) +a ea x(x) = ea xg(x).al primo membro ho ora la derivata del prodotto ea x(x) e possiamo quindi scri-vereD_ea x(x)_ = ea xg(x)e quindi ea x(x) ` e una primitiva dellespressione al secondo membro ovveroea x(x) =_ ea xg(x) dx +cda cui segue che : x ea x__ ea xg(x) dx +c_.Siamo ora in grado di trovare la soluzione generale dellequazione (2.2. Seguiamola stessa procedura, moltiplichiamo ambo i membri per la funzione := x e_ p(x) dxche si chiama fattore integrante, per ottenere(x)
(x) +(x)p(x) (x) = (x) g(x).Notando che
(x) = p(x) (x), al primo membro abbiamo la derivata del prodot-to (x) (x) e possiamo quindi scrivereD_(x) (x)_ = (x) g(x).ovverolafunzionetraparentesi al primomembro` eunaprimitivadi quellaalsecondo membro e cio` e(x) (x) =_ (x) g(x) dx +c2.1. EQUAZIONI LINEARI 13da cui(x) =1(x)__ (x) g(x) dx +c_.La procedura descritta pu` o essere sintetizzata nel seguenteTeorema 2.1. Se le funzioni p, g sono continue sullintervallo I allora le soluzionic dellequazione
(x) +p(x) = g(x),esistono sullintervallo I e si possono scrivere comec : x 1(x)__ (x) g(x) dx +c_, (2.4)dove ` e il fattore integrante : x e_ p(x) dxe c si chiama integrale generale dellequazione differenziale. A partire da questaespressione ` e univocamente determinata la soluzione 0 che soddisfa la condizioneiniziale(x0) = 0,dove x0 I, la funzione 0 si chiama integrale particolare dellequazione diffe-renziale.NOTA. Grazie alle propriet` a degli integrali deniti di funzioni continue ` e pos-sibile scrivere esplicitamente la soluzione che soddisfa la data condizione inizialecome : x e_xap(s) ds__xae_tap(s) dsg(t) dt +c_, (2.5)dove a ` e un punto qualsiasi che appartiene allintervallo I. Se scegliamo a =x0allora il valore della costante c ` e c = y0.Invece di utilizzare le espressioni (2.4) e (2.5) ` e comunque preferibile procede-re nel seguente modo1. Determinare gli intervalli di continuit` a delle funzioni p, g ed in particolare quel-lo che contiene il punto x0.2. Determinare il fattore integrante.3. Determinare la soluzione generale.14 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINE4. Trovare il valore della costante c.Illustriamo questa procedura con un esempioEsempio. Vogliamo trovare la soluzione dellequazione differenziale
(x) + 3 (x) = x,che corrisponde alle condizioni iniziali(0) = 1.I coefcienti sono continui in tutto R e quindi la soluzione ` e unica ed ` e denita intutto R. Il fattore integrante ` e(x) := e_ 3 dx= e3 x.Moltiplichiamo ambo i membri dellequazione per (x),e3 x
(x) + 3 e3 x(x) = xe3 xD_e3 x(x)_ = xe3 xe3 x(x) =_ xe3 xdx +c.Calcoliamo lintegrale al secondo membro per parti ottenendo_ xe3 xdx =13xe3 x 19e3 x+cla soluzione generale ` e quindic : x 13x 19 +c e3 x.Calcoliamo ora la soluzione particolare corrispondente alle condizioni inizialiy(0) = 1.Sostituendo nella soluzione generale otteniamo lequazione19 +c = 1da cui troviamo c = 109 , che individua la soluzione cercata0 := x 13_x 13 103 e3 x_.2.1. EQUAZIONI LINEARI 15EDO non lineari.Per le equazioni differenziali non lineari non esiste un metodo risolutivo generalema esistono molte classi di speciali equazioni che si possono risolvere. In questenote non riporteremo questa classicazione, ci limiteremo ad alcuni esempi e adunaclassespecica. Perleequazionidifferenzialiordinarienonlineari ` eper` opossibile enunciare un teorema di esistenza ed unicit` a locale.Teorema 2.2 (Teorema di Cauchy).Consideriamo il problema di Cauchy_
(x) = f(x, (x))(x0) = y0(2.6)dove f: A R2R, ed A ` e il rettangolo aperto (a, b) (c, d), (x0, y0) A. Sele funzioni f, D2f sono continue in A allora esiste un h > 0 ed ununica funzione : (x0 h, x0 +h) (a, b) Rche sia soluzione del problema (2.6).Per la versione dello stesso teorema nel caso dei sistemi di equazioni differenzialivedi il Teorema 5.1. Notiamo una differenza di grande rilevanza fra questo teoremaedilprecedente, lintervallodiesistenzadellasoluzione NON` elintervallodicontinuit` a dei dati, illustriamo con un esempio questa importante differenzaEsempio. Consideriamo il problema di Cauchy_
(x) = (x)2y(0) = 1.(2.7)Lafunzionef : (x, y) y2soddisfaleipotesi del teoremaprecedenteelasoluzione, che impareremo a trovare nel prossimo paragrafo, ` e := x 11 x.Questafunzione` edenitain(, 1) (1, )ma` esoluzionedellequazionedifferenziale in (, 1) che ` e lintervallo che contiene il punto iniziale x0 = 0. Secerchiamo le soluzioni che soddisfano la condizione iniziale y(0) =x0 troviamole funzionix0 : x x01 x0x16 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINEche sono soluzioni dellequazione differenziale in___(,1x0) se x0> 0,( 1x0, ) se x0< 0.mentre la soluzione per x0 = 0 ` e la funzione nulla che ` e denita su tutto R. Lin-tervallo di esistenza della soluzione dipende quindi dalla condizione iniziale e nondai dati del problema come nel caso lineare. Per i graci delle soluzioni gura 2.2a pagina 16.432101234y2 1 1 2xFigura 2.2: Diversi intervalli di esistenzaDal Teorema di esistenza ed unicit` a di Cauchy, Teorema 2.2, segue anche unal-tra conseguenza che sar` a di grande utilit` a i graci di due soluzioni diverse dellastessa equazione differenziale non si possono incontrare in un punto in cui valgo-no le ipotesi del teorema di esistenza ed unicit` a. Questo accade perch e, altrimenti,avremmo due soluzioni diverse dello stesso problema ai valori iniziali.NelprossimoesempiovediamounasituazioneincuiilTeorema2.2non` eapplicabile ed in cui non c` e unicit` a delle soluzioniEsempio. Consideriamo il problema di Cauchy_
(x) =3_(x)y(0) = 0(2.8)le soluzioni di questo problema di Cauchy, che impareremo a trovare nel prossimo2.2. EQUAZIONI A VARIABILI SEPARABILI 17paragrafo, sonoa : x _0 0 x x0_23(x a)3/2x > a.dove a ` e un numero non negativo qualsiasi. La situazione ` e quindi la seguente: lasoluzione parte dallorigine e segue lasse orizzontale che pu` o lasciare in qualsiasimomento, per x = a, seguendo una delle due funzioni descritte, gura 2.3 a pagina17. Abbiamo quindi innite soluzioni corrispondenti allo stesso problema ai valori10.500.510.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2xFigura 2.3: Non unicit` a delle soluzioniiniziali.2.2 Equazioni a variabili separabiliConsideriamooraunaclassediequazionidifferenzialiperlequaliabbiamounmetodo risolutivo, sono quelle che si possono scrivere comeM(x) +N((x))
(x) = 0. (2.9)La riduzione a questa forma non ` e possibile in generale ma solo per alcune equa-zioni differenziali del primo ordine. Illustriamo questo fatto tramite un esempioEsempio. Consideriamo lequazione differenziale
(x) =x21 +(x)2,che possiamo riscrivere comex2+_1 +(x)2
(x) = 0,18 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINEche ` e unespressione del tipo 2.9. Mentre, ad esempio, lequazione
(x) = ln(x +(x))non pu` o essere scritta in questa forma.Le equazioni differenziali ordinarie che si possono scrivere nella forma 2.9 sichiamano equazioni a variabili separabili. Vediamo come` e possibile risolverequesta classe di equazioni.Supponiamo di essere in grado di trovare, su un certo intervallo I, una primitivaH1 di M ed una primitiva H2 di N, grazie alla regola di derivazione delle funzionicomposte abbiamo cheddxH2((x)) = H
2((x))
(x) = N((x))
(x)e quindi possiamo riscrivere la nostra equazione differenziale comeddx_H1(x) +H2((x))_ = 0, x Ida cui possiamo dedurreH1(x) +H2((x)) = c.Come vedete si tratta di una equazione da cui, se lespressione di H2 ce lo consen-te, possiamo ricavare esplicitamente la funzioney, in ogni caso abbiamo trovatoquello che si chiama un integrale primo ovvero una equazione in cui non apparepi ` u la derivata. Se abbiamo le condizioni iniziali possiamo scrivere_xx0M(t) dt +_xx0N(y(t)) dt = 0_xx0M(t) dt +_yy0N(t) dt = 0.Il procedimento astratto appena descritto viene applicato nel seguente esempioEsempio. Consideriamo lequazione
(x) =x2(x).Pe prima cosa vediamo se possiamo ridurla nella forma richiesta. Moltiplichiamoper (x) e riscriviamo lequazione come(x)
(x) = x2;2.2. EQUAZIONI A VARIABILI SEPARABILI 19notatechenelfarequestopotremmoavereaggiuntodelleulteriorisoluzioniinquanto, in questa nuova forma, la funzione incognita y pu` o assumere anche il va-lore zero, cosa che non era possibile in precedenza. Di questo fato dovremo tenereconto alla ne. Per portarla nella forma richiesta scriviamox2+(x)
(x) = 0.Poich` e una primitiva di x x2` e x 13 x3ed una primitiva di x (x)
(x) ` ex (x)2allora il processo di integrazione che abbiamo appena descritto ci portaha13x3+ 12y2= cy2= 2 c + 23x3quando il secondo membro di questa espressione ` e non negativo (positivo per le-quazione di partenza) possiamo risolvere lequazione e troviamo le due soluzioniche sonoc := x _2 c + 23x3, per 2 c + 23x3 0se ad esempio cerchiamo la soluzione con condizioni iniziali y(0) = 2 da y2=2 c +23x3sostituendo otteniamo 2=2 c e quindic=1. Dobbiamo richiedereanche che il secondo membro sia non negativo e quindi che 2 +23x3 0 ovverox 33. La soluzione cercata ` e : x _2+ 23x3, per x 33,abbiamo scelto la radice positiva afnch e la condizione iniziale sia soddisfatta.Nel riportare una equazione differenziale alla forma (2.9) dobbiamo procederecon attenzione.Esempio. Consideriamo lequazione
(x) = x2_(x)21_si tratta di una equazione a variabili separabili che possiamo scrivere comex2+1((x) 1) ((x) + 1)
(x) = 0ma per fare questo abbiamo dovuto dividere per un fattore che non sappiamo se ` ezero oppure no.20 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINEPercapirecosaaccadestudiamolequazionealgebricaottenutaponendoilsecondo membro dellequazione eguale a zero(y 1) (y + 1) = 0.Questa equazione ha due soluzioni y = 1 e y = 1 e le due funzioni costanti1 := x 1, 2 := x 1sono soluzioni dellequazioni differenziale come si pu` o facilmente vericare persostituzione. Laltro elemento importante di cui dobbiamo tenere conto` e che leipotesi del Teorema di Cauchy sono soddisfatte in tutto il piano e quindi le soluzioninon possono mai intersecarsi. Le due soluzioni costanti dividono il piano in treregioni da cui le soluzioni non possono mai uscire. Risolviamo lequazione_x2dx _(x)1(y 1) (y + 1)dy +c = 0e calcolando gli integrali per 1 y 1 otteniamo1/3 x31/2 ln((x) 1) + 1/2 ln((x) + 1) +c = 0un po di calcoli ci portano alla soluzione := x 1 e23x3c1e23x3c1 1.Lo studente verichi che questa espressione delle soluzioni ` e sempre valida pery ,= 1 e y ,= 1 in tutte e tre le regioni del piano, gura 2.4 a pagina 21.Vedi lesercitazione che riguarda questo Capitolo: equazioni-diff.mws o equazioni-diff.html2.2. EQUAZIONI A VARIABILI SEPARABILI 213210123y1 0.5 0.5 1 xFigura 2.4: Soluzioni di equilibrio22 CAPITOLO 2. EQUAZIONI DEL PRIMO ORDINECapitolo 3Dinamica delle popolazioniQuesto capitolo ` e dedicato allo studio qualitativo del comportamento delle soluzio-ni di alcuni modelli matematici che descrivo la dinamica di sviluppo di popolazioni,per un ampio trattamento di questi modelli facciamo riferimento a [3].3.1 Il modello di MalthusIl primo modello di dinamica delle popolazioni che descriviamo ` e dovuto alleco-nomista inglese Thomas Malthus che sembra essere stato il primo ad osservare chealcune specie esibivano una crescita proporzionale alla popolazione3.2 Crescita esponenzialeSia N(t) la popolazione di una data specie al tempo t. Lipotesi piu semplice chepossiamo fare sul tasso di variazione della popolazione N` e che esso sia proporzio-nale al suo valore correnteN, ovvero che la dinamica della popolazione soddislequazione differenzialeN
(t) = r N(t), (3.1)dove r` e la costante di proporzionalit` a, che chiamiamo tasso di crescita o di de-clino a secondo che sia positiva o negativa, noi supporremo che siar >0. Serisolviamo lequazione differenziale (3.1) con le condizioni inizialiN(0) = N0,otteniamo la soluzioneN:= t N0er t.2324 CAPITOLO 3. DINAMICA DELLE POPOLAZIONIQuesto modello matematico prevede una crescita esponenziale della popolazione,gura 3.1 a pagina 24. Questo tipo di comportamento ` e stato osservato in natura dN/dt NFigura 3.1: Modello di Malthusper periodi brevi ed in condizioni ideali, ma` e chiaro che prima o poi limitazio-ni di spazio, di cibo o di altre risorse non permettono la continuazione di questocomportamento.3.3 Il modello logisticoPer tenere conto del fatto che il tasso di crescita in effetti non ` e costante ma dipen-de dal livello della popolazione sostituiamor con una funzionef(N) ottenendolequazioneN
(t) = f(N(t)) N(t). (3.2)Le propriet` a a cui vogliamo che la funzione f soddis sono1. Per valori di N piccoli abbiamo f(N) = r > 0.2. La funzione f decresce al crescere di N.3. La funzione f diventa negativa per N sufcientemente grande.La funzione pi ` u semplice che soddisfa queste ipotesi ` e la funzione lineare (afne)f:= N r a N.Infatti abbiamo che f(0) = r, e quindi f(N) = r > 0 per N piccolo, f
(N) = ae quindi f` e decrescente,limNf(N) = 3.3. IL MODELLO LOGISTICO 25equindi f ` enegativaper Nabbastanzagrande. Lequazionechedescriveladinamica della popolazione diventa quindiN
(t) = [r a N(t)]N(t). (3.3)Questa equazione ` e conosciuta come equazione logistica o equazione di Verhul-st, dal nome del matematico belga Pierre Verhulst che di solito viene scritta comeN
(t) = r_1 1KN(t)_N(t). (3.4)dove abbiamo posto K :=ra.La costante r si chiama tasso intrinseco di crescita, che, come abbiamo visto,` e il tasso di crescita in assenza di limitazioni esterne, vedremo in breve il signicatodella costante K.La soluzione di questa equazione si pu` o trovare in quanto si tratta di una equa-zione a variabili separabili, ma procederemo in modo diverso, cercheremo di de-scrivere il comportamento delle soluzioni in base a considerazioni di tipo geometri-co. Questo tipo di approccio riveste una grande importanza nello studio delle equa-zioni differenziali in quanto spesso non siamo in grado di trovare esplicitamente lesoluzioni mentre possiamo ricavare moltissime informazioni dallequazione stessa.Trarremo tutte le informazioni che ci sono necessarie dal graco della funzioneal secondo membro dellequazione (3.4) che descrive la derivata prima della fun-zione incognita, gura 3.2 a pagina 25. Si tratta di una parabola che incontra lasser K/4dN/dtK/2 KNFigura 3.2: Il graco di N
in funzione di Norizzontale nei due punti N= 0 ed N= K ed ha un massimo per N=K2 .26 CAPITOLO 3. DINAMICA DELLE POPOLAZIONISe f(N) ` e N(t) ` ePositiva crescente Crescente e convessaPositiva decrescente Crescente e concavaNegativa crescente Decrescente e concavaNegativa decrescente Decrescente e convessaTabella 3.1: Relazioni fra il graco di f(N) e quello di N(t)Ora vogliamo disegnare il graco delle soluzioni per t positivo e per N> 0.Faremo questo senza cercare di risolvere lequazione ma in base al graco di N
infunzione di N. Per valori compresi nellintervallo (0, K) vediamo che la derivatadella funzione, N
,` e positiva e quindi la funzione` e crescente, in modo analogopossiamo dire che perN>Kla funzione` e decrescente. Nei due estremi del-lintervallo 0, K abbiamo che la derivata prima ` e zero e N(t) non cambia. Le duesoluzione costantiN=1(t)=0 eN=2/t)=K, si chiamano soluzionidi equilibrio, esse corrispondono ai due puntiN=0 eN=KsullasseNsichiamano punti di equilibrio o punti critici. Notate che la funzione Nnon pu` oattraversare questi due punti poich e la nostra equazione soddisfa le ipotesi del Teo-rema di esistenza ed unicit` a. Per poter disegnare il graco delle soluzioni possiamoricavare ancora delle informazioni che sono contenute nella tabella 3.1 a pagina26. La spiegazione di queste relazioni ` e abbastanza semplice. Prendiamo ad esem-pio come valore iniziale della soluzione un numero compreso fra 0 edK2 , poich ela derivata ` e positiva la soluzione sar` a, inizialmente, crescente, inoltre, per questivalori diNanche la derivata prima` e crescente e quindi la sua derivata, cio e laderivata seconda di N` e positiva, il che implica che la funzione ` e convessa, questoragionamento continua a valere nch` e la funzione non raggiunge il valoreK2incui la derivata smette di crescere ed inizia a decrescere, si tratta quindi di un puntodi esso per la soluzione che per` o poi continua a crescere avvicinandosi al valorelimite K, che chiamiamo livello di saturazione o capacit` a di sostentamento del-lambiente. In tutte le altre regioni valgono considerazioni analoghe; prendiamoad esempio un valore iniziale N0>K poich e la derivata prima ` e negativa allorala funzione decresce e, dal graco diN
vediamo che al suo decrescere il valoredella derivata cresce, la soluzione risulta quindi essere convessa,gura 3.3 a pagina27. In molte situazioni le informazioni che abbiamo derivato sul comportamentodelle soluzioni sono sufcienti, ma se vogliamo avere delle informazioni pi ` u det-tagliate, come ad esempio dei valori numerici, dobbiamo risolvere lequazione. Lasoluzione dellequazione differenziale con le condizioni iniziali N(0) = N0 ` eN:= t N0KN0 + (K N0)er t(3.5)3.3. IL MODELLO LOGISTICO 27K/2K tFigura 3.3: Il modello logisticoda questa espressione troviamo conferma alla nostra analisi qualitativa ed in parti-colare otteniamo chelimtN(t) = K.EsprimeremoquestofattodicendochelasoluzionecostanteN=1=Kdiequilibrio ` e una soluzione asintoticamente stabile, o che il punto N=K` e unequilibrio o un punto critico asintoticamente stabile. Questo vuol dire che, dopoun tempo sufcientemente lungo, la popolazione ` e vicina al livello di saturazioneK indipendentemente dal suo valore iniziale.Daltra parte in comportamento della soluzione di equilibrioN=2=0` esostanzialmente diverso. Anche una soluzione che parte molto vicina a zero, crescenoadavvicinarsialvaloreK.Diremoche2` e una soluzione di equilibrioinstabile o che N= 0 ` e un equilibrio o punto critico instabile.Possiamo visualizza questi due diversi comportamenti nel modo seguente. Sta-tesvolgendounesperimentoinunambientesterile, unambientecio` eincuilapopolazione di batteri presente ` e praticamente zero, la dinamica della popolazionedi batteri ` e governata dallequazione (3.4). E corretto svolgere lesperimento nel-lipotesi che lambiente ` e sterile?La risposta ` e no, in quanto come abbiamo vistola popolazione dei batteri crescer` a no a raggiungere il valore critico, chiaramentese la durata dellesperimento ` e breve e se il livello iniziale di contaminazione N0` e basso allora lesperimento pu` o essere svolto. Da un altro punto di vista se stateeffettuando un esperimento su una popolazione di batteri che per` o viene a contattocon degli elementi contaminanti che ne uccidono una parte, correte il rischio chead un certo punto la popolazione di batteri si estingua? Ancora una volta la rispo-28 CAPITOLO 3. DINAMICA DELLE POPOLAZIONIsta ` e no in quanto la popolazione tender` a sempre a crescere e ritornare al livello disaturazione.Esempio. Il modello logistico` e stato utilizzato per studiare la crescita della po-polazione di halibut (ippoglosso o salmone atlantico) in alcune aree dellOceanoPacico, vedi [3].Sia N(t), la massa totale o biomassa misurata in chili della popolazione di hali-but al tempo t. I parametri nellequazione logistica sono stimati in r := 0.71/annoe K := 80.5106kg, se la massa iniziale ` e N0 := 0.25 K, trovare il valore dellabiomassa dopo due anni, trovare il tempo per il quale N() = 0.75 K.E conveniente riscalare lequazione rispetto alla capacit` a di sostentamento Kriscrivendo lequazione (3.5) comeN(t)K=N0KN0K+ (1 N0K )er t.Dai dati del problema ricaviamoN(2)K=0.250.25 + 0.75 e1.42 0.5797,e quindi N(2)46.7 106Kg.Per trovare dobbiamo risolvere lequazione trovata rispetto a t ottenendoer t=N0K [1 NK]NK [1 N0K ]e quindit = 1rlnN0K [1 NK]NK [1 N0K ]Utilizzando i dati forniti troviamo che = 3.095anni.3.4 Esistenza di una soglia criticaConsideriamo o ora lequazioneN
(t) = r_1 1TN(t)_N(t). (3.6)3.4. ESISTENZA DI UNA SOGLIA CRITICA 29dover eTsono costanti positive assegnate. Notate che, a parte il fatto di averesostituito il parametro K con T, questa equazioni differisce dalla precedente soloper il segno, nondimeno questo avr` a un profondo effetto sul comportamento dellesoluzioni.Se anche in questo caso disegnamo il graco della funzione al secondo membrodellequazione differenziale otteniamo un graco molto diverso in quanto si trattasempre di una parabola ma concava invece di convessa, gura 3.4 a pagina 29. IrT/4dN/dtT/2 TNFigura 3.4: Il graco di N
in funzione di Npunti di incontro con lasseNsono i due punti criticiN=0 edN=T, checorrispondo no alle due soluzioni (costanti) di equilibrio1=0 e2=T. Pervalore di N compresi fra 0 e T questa volta la soluzione ` e decrescente, e per valoripi ` u grandi di Tla soluzione ` e crescente. Quindi 1 ` e un equilibrio asintoticamentestabile mentre 2 ` e instabile. Unanalisi qualitativa analoga a quella fatta nel casoprecedente ci permette di stabilire quando la soluzione ` e concava o convessa e didescrivere quindi il comportamento delle soluzioni di questa equazione, gura 3.5a pagina 30. Come vedete abbiamo due comportamenti molto diversi, la soluzionecresce indenitamente se il valore iniziale ` e a T, mentre tende a zero se il valoreiniziale ` e inferiore. Il valore critico N= Tsi chiama soglia critica.Anche in questo caso si tratta di una equazione a variabili separabili che pu` oessere risolta, la soluzione con condizioni iniziali N(0) = N0 otteniamoN:= t N0TN0 + (T N0)er t.In questo caso ` e importante determinare lintervallo in cui la soluzione ` e denita.SeN0Tallora c` e un asintoto30 CAPITOLO 3. DINAMICA DELLE POPOLAZIONIT/2TdN/dt NFigura 3.5: Esistenza di una soglia criticaverticale per un valore positivo di t ed esattamente pert0 :=1r lnN0N0 T ,la soluzione ` e quindi denita soltanto no a questo valore, avvicinandosi al qualetende a .Lapopolazionediqualchespecieesibiscequestocomportamento, seilsuolivello sceglie sotto una certa soglia allora la popolazione se estingue, altrimentiha un comportamento di crescita, chiaramente questa non pu` o essere indenita;lequazione quindi deve essere modicata.3.5 Crescita logistica con una soglia criticoComeabbiamodettoinprecedenzanelcasodellesistenzadiunasogliacriticaabbiamo ancora soluzioni che crescono esponenzialmente. Per riassumere tutti icomportamenti analizzati ` e possibile combinare i modelli esaminati considerandolequazioneN
(t) = r_1 1TN(t)_ _1 N(t)K_N(t). (3.7)con 0 0taleche se|y0 e| < allora|(x, y0) e| < per ogni x 0.Possiamo illustrare questa denizione dicendo che tutte le soluzioni che par-tono, perx=0, sufcientemente vicino alla soluzione di equilibrio rimangonovicine quanto voglio alla soluzione stessa, gura 6.1 a pagina 58. in cui la so-luzione stabile` e quella nulla, lorigine, ed abbiamo preso=1.5 e =0.5.Denizione 6.3 (Attrattivit` a delle soluzioni di equilibrio).Sia e una soluzione di equilibrio del sistema (6.1) diremo che e ` e una soluzionedi attrattiva se esiste 0> 0 tale che se |y0 e| < alloralimx+(x, y0) = e.In altre parole tutte le soluzioni che partono da un certo intorno della soluzionedi equilibrio tendono a quel valore.Denizione 6.4 (Stabilit` a asintotica delle soluzioni di equilibrio).Sia e una soluzione di equilibrio del sistema (6.1) diremo che e ` e una soluzionedi equilibrio asintoticamente stabile se ` e stabile ed ` e attrattiva. Se la condizionedi attrattivit` a vale per tutte le condizioni iniziali (=+) allora parleremo distabilit` a asintotica globale.58 CAPITOLO 6. STABILIT `A1.510.500.511.51.5 1 0.5 0.5 1 1.5Figura 6.1: Lorigine ` e un equilibrio stabile6.2 Stabilit` a dei sistemi lineariDa quanto abbiamo detto sulle soluzioni sistemi lineari omogenei a coefcienti co-stanti non ` e difcile dedurre un criterio di stabilit` a per questi sistemi. Consideriamoil sistemay
(x) = Ay(x), (6.2)e supponiamo che det A ,= 0. Questo sistema ha un unico punto di equilibrio y = 0e vale il seguenteTeorema 6.5. Lorigine ` e una soluzione di equilibrio per il sistema (6.2) che ` e1. Asintoticamentestabileseesoloseogniautovaloredi Ahaparterealenegativa.2. Stabile se e solo se tutti gli autovalori hanno parte reale non positiva e quel-li con parte reale nulla hanno degli autospazi con dimensione eguale allamolteplicit` a dei corrispondenti autovalori.Notiamo che se esiste un autovalore con parte reale positiva allora lorigine ` euna soluzione di equilibrio per il sistema (6.2) che ` e instabile, lo stesso accade seesiste un autovalore con parte reale nulla e molteplicit` a strettamente maggiore delladimensione del corrispondente autospazio.6.3. STABILIT `A DEI SISTEMI NONLINEARI 596.3 Stabilit` a dei sistemi nonlineariTorniamo ora al sistema (6.1), poich e la funzione f` e derivabile possiamo scriveref(y) = Df(e)(y e) +g(y e)doveg(y e) := |y e| 0(|y e|)equindiinparticolareg(0) =0.Consideriamo ora il sistemaz
(x) = Az(x) +g(z(x)), (6.3)dove abbiamo indicato con A := Df(e) ed abbiamo effettuato il cambiamento divariabili z :=y e. Come al solito questo cambiamento di variabile ` e motivatodalla necessit` a di traslare gli assi nel nuovo punto di riferimento e in modo che lanuova variabile sia la variazione della precedente. I due sistemi (6.3) e (6.1) sono lostesso sistema, lo abbiamo scritto in questa seconda forma perch e speriamo che inun intorno del punto di equilibrio il comportamento delle soluzioni di (6.1) possaessere simile a quello del corrispondente sistema lineare.Il sistema linearez
(x) = Az(x), (6.4)si chiama linearizzazione del sistema (6.1) nel punto di equilibrio e. Questo siste-ma approssima il sistema non lineare vicino al punto di equilibrio e ed ha loriginecome punto di equilibrio; questo punto ` e isolato se det A ,= 0.Vale il seguente TeoremaTeorema 6.6. Supponiamo che il sistema (6.1) abbia come soluzione di equilibrioy := e, allora1. Se ogni autovalore di A ha parte reale negativa allora e ` e asintoticamentestabile.2. Se esiste un autovalore di A con parte reale positiva allora e ` e instabile.Quando la matrice A ha un autovalore con parte reale zero non possiamo direnulla sulle propriet` a del sistema (6.3) in quanto una perturbazione, sia pur piccolacome g non conserva le propriet` a associate a questi tipo di autovalore.60 CAPITOLO 6. STABILIT `ACapitolo 7EserciziQuesta parte contiene alcuni esercizi sulle equazioni differenziali7.1 Equazioni del primo ordineIniziamo con alcuni esercizi svoltiESERCIZIO 7.1. Data lequazione differenzialey
(x) + 3 x2y(x) = x2. (7.1)1. Dire se lequazione ammette soluzioni costanti.2. Calcolare illimx(x)per una generica soluzione .3. Trovare la soluzione che soddisfa le condizioni iniziali y(0) = 2.ESERCIZIO 7.2. Data lequazione differenzialey
(x) = cos(x)_y(x) 1. (7.2)1. Vericare se valgono le ipotesi del Teorema di esistenza ed unicit` a in x0=0,y0 = 1.2. Trovare le due soluzioni che soddisfano, rispettivamente, le due condizioniiniziali y(0) = 2,y(0) =1716.6162 CAPITOLO 7. ESERCIZI3. Determinare in quale intervallo, contenente in punto iniziale, le soluzionidel punto precedente rimangono nellinsieme in cui valgono le ipotesi delTeorema di esistenza ed unicit` a.ESERCIZIO 7.3. Data lequazione differenziale(x + 1) y
(x) y(x) + 3 y(x)2= 01. Determinare gli equilibri.2. Calcolare le soluzioni che soddisfano le condizioni iniziali y(0) = 1/2 e y(0) =14 e dire in quale intervallo sono soluzioni.ESERCIZIO 7.4. Determinare la soluzione dellequazione differenzialey
(x) = x_y(x) 2che soddisfa le condizioni inizialiy(1) = 3determinare lintervallo massimale di esistenza e analizzare gli equilibri.ESERCIZIO 7.5. Data lequazione differenzialey
(x) = (y(x) 2) sin(x)1. Determinare la soluzione massimale che soddisfa la condizione inizialey(1) = 12. Determinare la soluzione massimale che soddisfa la condizione inizialey(1) = 3ESERCIZIO 7.6. Data lequazione differenzialey
(x) = y(x)31. Determinare gli equilibri.2. Determinare la soluzione massimale che soddisfa la condizione iniziale y(1) =17.1. EQUAZIONI DEL PRIMO ORDINE 633. Esiste una soluzione y dellequazione differenziale tale che 0 < y(1) e y(5) < 0?ESERCIZIO 7.7. Determinare la soluzione dellequazione differenzialey
(x) =xy 1che soddisfa la condizione inizialey(2) = 2Determinare lintervallo massimale di esistenza della soluzione trovata.ESERCIZIO 7.8. Determinare la soluzione dellequazione differenzialey
(x) = 3x22 y + 2che soddisfa la condizione inizialey(2) = 2Determinare lintervallo massimale di esistenza della soluzione trovata.ESERCIZIO 7.9. Risolvere le seguenti equazioni differenziali1. y
(x) = 2 +y(x)x1xRisolvere i seguenti problemi ai valori iniziali e determinare lintervallo mas-simale di esistenza2. y
(x) = y(x) +x3, y(0) = 03. y
(x) =x+y(x)x, y(0) = 04. y
(x) = y(x) cos(x) +12 sin(2 x), y(0) = 15. y
(x) = y(x) cot(x) +xsin(x), y(1) = 16. y
(x) = x(1 +y(x)2), y(0) = 17. y
(x) y(x) = 1 +x, y(1) = 08. y
(x) = xy 2, y(0) = 29.y(x)y
(x)= tan(x), y(2) = 164 CAPITOLO 7. ESERCIZI7.2 Equazioni del secondo ordineESERCIZIO 7.10. Trovare la soluzione dellequazione differenzialey
(x) 6 y
(x) + 5 y(x) = 5 x (7.3)che soddisfa le condizioni iniziali y(0) = 1 e y
(0) = 0.ESERCIZIO 7.11. Data lequazione differenzialey
(x) y(x) = 4 xex1. Dire se esiste e dove risulta denita la soluzione di condizioni inizialiy(5) = ln(), y/(5) = 3.2. Dire se ammette soluzione unica il problema ai limitiy(0) = 4, y(1) = 4.3. Determinare, se esistono, le soluzioni dellequazione differenziale tali chelimx+y(x) = +limxy(x) < +ESERCIZIO 7.12. Data lequazione differenzialey
(x) 4 y(x) = 16 xe2 x1. Dire se esiste e dove risulta denita la soluzione di condizioni inizialiy(3) = ln(), y/(3_) = 2.2. Dire se ammette soluzione unica il problemay(0) = 4, y(12) = 43. Determinare le soluzioni dellequazione differenziale tali chelimx+y(x) = +limxy(x) < +7.3. STUDIO QUALITATIVO 65ESERCIZIO 7.13.Determinare le soluzioni dellequazione differenziale(y
(x) y
(x) = e(x)che soddisfano la condizione inizialey(0) = 1e che siano denite e limitate sulla semiretta 0 x.ESERCIZIO 7.14. Determinare le soluzioni dellequazione differenziale(y
(x) + 2 y
(x) 3 y(x) = e(x)che soddisfano la condizione inizialey(0) = 1e che siano limitate sulla semiretta 0 x.ESERCIZIO 7.15. Determinare la soluzione y dellequazione differenziale(y
(x) y
(x) 2 y(x) = e(x)che soddisfa la condizione inizialey(0) = 2e tale chelimxy(x) = 0ESERCIZIO 7.16. Determinare le soluzioni dellequazione differenzialeeqd:= (y
(x) + 2 y
(x) = 3 xche soddisfano la condizione inizialey(0) = 166 CAPITOLO 7. ESERCIZI0.60.40.200.20.40.63 2 1 1 2 3 yFigura 7.1: Il graco della funzione che descrive lequazione differenziale 7.47.3 Studio qualitativoESERCIZIO 7.17. Data lequazione differenzialey
(x) = y(x) e(12y(x)2). (7.4)1. Determinare gli eventuali punti di equilibrio .2. Sapendocheilgracodellafunzionealsecondomembro` eingura7.1a pagina 66. disegnare le soluzioni che hanno, rispettivamente, condizioniiniziali y(0) = 2,y(0) =12,y(0) = 12,y(0) = 2. (Le soluzioni non sipossono calcolare)3. Gli equilibri eventualmente trovati sembrano stabili?4. La soluzione di condizioni iniziali y(0) = 2 ` e unica?5. Per questultima soluzione calcolare y
(0),y
(0).ESERCIZIO 7.18. Si consideri lequazione differenzialey
(x) = y(x) (y(x) 2).1. Determinare gli eventuali punti di equilibrio e disegnare le soluzioni che hanno,rispettivamente, condizioni iniziali y(0) = 1,y(0) = 1,y(0) = 3.2. La soluzione con condizioni iniziali y(0) = 1 ` e unica ?3. Per questultima soluzione calcolare Dy(0),D2y(0) .4. Gli equilibri eventualmente trovati sono stabili ?ESERCIZIO 7.19. Data lequazione differenzialey
(x) = y(x)2+ 17.3. STUDIO QUALITATIVO 671. Determinare gli eventuali punti di equilibrio e disegnare le soluzioni che hanno,rispettivamente, condizioni iniziali y(0) = 2,y(0) = 0,y(0) = 2.2. La soluzione di condizioni iniziali y(0) = 3 ` e unica ?3. Per questa soluzione calcolare Dy(0),D2y(0).4. Gli equilibri eventualmente trovati sono stabili ?ESERCIZIO 7.20. Determinare gli eventuali punti di equilibrio e disegnare le solu-zioni dellequazione differenzialey
(x) = ey(x)+e(y(x)) 52che hanno, rispettivamente, condizioni iniziali y(0) = 1,y(0) = 0,y(0) = 11. Gli equilibri eventualmente trovati sono stabili ?2. La soluzione di condizioni iniziali y(0) = 3 ` e unica?Il graco della funzione ey+e(y)52` e riportato in gura gura 7.2 a pagina 67.0123452 1 1 2xFigura 7.2: Graco di ey+e(y)5268 CAPITOLO 7. ESERCIZICapitolo 86970 CAPITOLO 8.Soluzioni degli EserciziDi seguito riportiamo le soluzioni agli esercizi proposti nel testo.Esercizio 1.1. Da preparare Esercizio 1.18.1 Equazioni del primo ordineEsercizio 7.1. Si tratta di una equazione differenziale ordinaria lineare del primoordine: Isuoicoefcientisonocontinuiintutto Requindianchelesoluzionirisulteranno denite su tutto R. Per risolverla calcoliamo il fattore integrante che ` e : x e_ 3 x2dx= ex3se moltiplichiamo lequazione differenziale per otteniamoex3 _y
(x) + 3 x2y(x) = ex3x2.Una primitiva del primo membro dellequazione ` e il prodotto y in quanto(y)
(x) = ex3(y
(x) + 3 x2y(x))una primitiva del secondo membro ` e_ex3x2dx =13 ex3e quindi abbiamo cheex3y(x) =13 ex3+c.La soluzione generale dellequazione differenziale ` ec : x 13 +ex3cDa questa espressione della soluzione generale vediamo che 1. Lequazione am-mette la soluzione costante o : x 13 2. Per ogni soluzione abbiamo chelimxc(x) =13.Soluzioni degli Esercizi 71Se sostituiamo le condizioni iniziali richieste otteniamo lequazione2 =13 +cche risolta rispetto alla costante ci dac =53,la soluzione richiesta ` e quindi : x 13 + 53 e(x3)Per completezza riportiamo i graci delle soluzioni per diverse condizioni iniziali,gura 8.1 a pagina 71. Esercizio 7.121123y1 0.5 0.5 1 1.5 xFigura 8.1: Curve integrali dellequazione differenziale 7.1Esercizio 7.2. Si tratta di una equazione a variabili separabili. Gli equilibri sono lesoluzioni dellequazione_y 1 = 0e quindi abbiamo un punto di equilibrio per y=1 e la corrispondente soluzionecostante : x 1,notiamo inoltre che lequazione ` e denita nel piano xy soltanto nella striscia 1 ye che lungo la retta y = 1 non sono soddisfatte le ipotesi del Teorema di esistenzaed unicit` a . La soluzione si trova integrando_cos(x) dx _y(x)1s 1 d s +c1 = 072 CAPITOLO 8.facili calcoli ci dannosin(x) 2_y(x) 1 +c1 = 0che possiamo scrivere come_y(x) 1 =12sin(x) + 12 c1.ATTENZIONE: Per poter risolvere rispetto ad y(x) dobbiamo ipotizzare che il se-condo membro sia non negativo. Troviamo il valore di c1 che individua la soluzioneche ha condizioni iniziali y(0) = 2. Sostituendo x = 0 e y(0) = 2 otteniamo1 =12 c1che ha per soluzionec1 = 2sostituiamo nellespressione trovata per la soluzione_y(x) 1 =12sin(x) + 1.Considerandoivalorichepu` oassumerelafunzione sin(x)ilsecondomembrodi questa equazione ` e sempre positivo, possiamo quindi risolvere rispetto ad y(x)elevando al quadrato e troviamo1 : x 2 + 14sin(x)2+ sin(x)che` e soluzione per ogni valore di x. Troviamo la soluzione che ha condizioniiniziali y(0) =1716. Sostituendo x = 0 e y(0) =1716 otteniamo14=12 c1che ha per soluzionec1 =12sostituiamo nellespressione trovata per la soluzione_y(x) 1 =12sin(x) + 14.Soluzioni degli Esercizi 73Considerando i valori che pu` o assumere la funzione sin(x) e del fatto che il puntoiniziale ` e x = 0 il secondo membro di questa equazione ` e non negativo nellinter-vallo [a,b] dovea := 16 , b :=76 nellintervallo[6,7 6]possiamoquindirisolvererispettoady(x)elevandoalquadrato e trovando2 : x 1716 + 14sin(x)2+ 14sin(x)che ` e certamente soluzione dellequazione nellintervallo aperto ( 1 6,7 6), gura8.2 a pagina 73. Agli estremi dellintervallo [a,b] abbiamo che1.522.530 1 2 3 xFigura 8.2: Le due soluzioni dellequazione differenziale (7.3)2(a) = 1, 2(b) = 1e la soluzione raggiunge la retta in cui non valgono pi ` u le ipotesi del Teorema diesistenza ed unicit` a. La soluzione si potrebbe in effetti continuare assegnandogliil valore uno che possiamo proseguire o abbandonare seguendo unaltra soluzione,gura 8.3 a pagina 74. Esercizio 7.2Esercizio 7.3. 1. Le soluzioni di equilibrio sono le due soluzioni costantiy0 : x 0, y1 : x 1/3.Lequazione non ` e in forma normale, ma poich e ci occupiamo di soluzioni con datoiniziale x0 ,= 1 possiamo portarla in forma normale scrivendoy(x)
y(x)x + 1 + 3 y(x)2x + 1= 074 CAPITOLO 8.11.522.53y0 2 4 6 8 10 xFigura 8.3: Le curve integrali dellequazione differenziale (7.2)IlTeoremadiesistenzaedunicit` a` eapplicabileinognipuntodelpianotranneche lungo la retta verticale di equazione x = 1 e quindi le soluzioni da cercare alpunto 2. non possono attraversare le due soluzioni di equilibrio se non per x = 1.2. Si tratta di una equazione a variabili separabili che scriviamo comey(x)
y(x) 3 (y(x))2 (x + 1)1= 0integrando otteniamoln(|y(x)|) ln(| 1 + 3 y(x)|) ln(|x + 1|) = c.Cerchiamo la soluzione che soddisfa la condizione iniziale y(0) = 1/4, per quantodetto sullesistenza ed unicit` a lungo tutta la soluzione deve essere 0 < y(x) < 1/3ex> 1 come nel punto iniziale. Possiamo quindi eliminare i valori assolutiottenendoln_y(x)1 3 y(x)_ = ln(x + 1) +cimponendo le condizioni iniziali troviamo c = 0 e quindi risolvendo troviamo1 = x x + 13 x + 4,che ` e denita per x> 43. Notate che in effetti la soluzione dellequazione diffe-renziale in forma normale ` e denita per x> 1 ma se consideriamo lequazionedata (non in forma normale) questa soluzione attraversa la retta verticale x = 1ed ` e denita per x > 43; questo pu` o accadere perch e per x = 1 vale esattamen-te zero e quindi lequazione, in forma non normale, ` e soddisfatta anche per questovalore e soddisfatta inoltre per x > 43 come si pu` o vericare per sostituzione. PerSoluzioni degli Esercizi 75la seconda soluzione richiesta dalle condizioni iniziali possiamo dedurre che lungotutta la soluzione deve essere y(x) > 1/3 e x > 1, calcoli analoghi ci portano aln(y(x)3 y(x) 1) = ln(x + 1) +ced alla seconda soluzione2 = x 4 (x + 1)12 x + 1 ,che ` e denita per x > 112, che corrisponde allintervallo massimale di continuit` a.Esercizio 7.3Esercizio 7.4. Data la funzionef:= (x,y) x_y 2lequazione differenziale da studiare ` ey
(x) = x_y(x) 2Le ipotesi del Teorema di Cauchy sono soddisfatte per 2