Dynamical Modeling of Aircraft Landing Gear and its Multi ...€¦ · Draft Dynamical Modeling of...
30
Draft Dynamical Modeling of Aircraft Landing Gear and its Multi- objective Optimization with Simple Cell Mapping Method Journal: Transactions of the Canadian Society for Mechanical Engineering Manuscript ID TCSME-2017-0083 Manuscript Type: Article Date Submitted by the Author: 20-Oct-2017 Complete List of Authors: Wu, Wei guo; Tianjin University; Military Transportation Research Institute Xiong, Fu rui; Science and Technology on Reactor System Design Technology Laboratory, Nuclear Power Institute of China Sun, Jian qiao; School of Engineering, University of California Leng, Yong gang; Tianjin University Keywords: Aircraft Landing Gear, Dynamical Model, Simple Cell Mapping, Multi- objective Optimization Is the invited manuscript for consideration in a Special Issue? : Not applicable (regular submission) https://mc06.manuscriptcentral.com/tcsme-pubs Transactions of the Canadian Society for Mechanical Engineering
Transcript of Dynamical Modeling of Aircraft Landing Gear and its Multi ...€¦ · Draft Dynamical Modeling of...

Draft
Dynamical Modeling of Aircraft Landing Gear and its Multi-
objective Optimization with Simple Cell Mapping Method
Journal: Transactions of the Canadian Society for Mechanical Engineering
Manuscript ID TCSME-2017-0083
Manuscript Type: Article
Date Submitted by the Author: 20-Oct-2017
Complete List of Authors: Wu, Wei guo; Tianjin University; Military Transportation Research Institute Xiong, Fu rui; Science and Technology on Reactor System Design Technology Laboratory, Nuclear Power Institute of China Sun, Jian qiao; School of Engineering, University of California Leng, Yong gang; Tianjin University
Keywords: Aircraft Landing Gear, Dynamical Model, Simple Cell Mapping, Multi-
objective Optimization
Is the invited manuscript for consideration in a Special
Issue? : Not applicable (regular submission)
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Dynamical Modeling of Aircraft Landing Gear and its
Multi-objective Optimization with Simple Cell Mapping
Method
Wei-Guo Wu 1,2, Fu-Rui Xiong
3, Jian-Qiao Sun
4 *, Yong-Gang Leng
1
1Department of Mechanics, Tianjin University, Tianjin, 300072, China 2Military Transportation Research Institute, Tianjin, 300161, China
3Science and Technology on Reactor System Design Technology Laboratory, Nuclear Power Institute of China , Chendou,610041, China 4School of Engineering, University of California, Merced, CA 95343, USA
Email:[email protected];
*Corresponding author: Jian-Qiao Sun
Email:[email protected]
Abstract
In order to study the dynamical characters of aircraft landing gear and carry out successive optimizations, the
mathematical model of flexible landing gear is established by Hamiltonian principle. The dynamical model includes
the tire force estimation derived from the impact model. Dynamical analysis with the flexible model is then conducted.
Stress distribution is obtained from the dynamical analysis, which can be used for fatigue analysis, optimization de-
sign and so on. To achieve better dynamical characteristic in terms of vibration reduction, a multi-objective optimiza-
tion problem is formulated and solved via the simple cell mapping algorithm. The optimal simulations indicate the
quality of the optimal structural designs. Compared with the baseline structure, the candidate optimal designs can
improve the dynamic performances in regard of fuselage vibration suppression, better shock absorber efficiency and
less stress settling time. The proposed multi-objective optimal parameter design provides a fast tuning procedure that
saves considerable amount of time compare with the FEM based optimization. In addition, the optimal parameter set
provides useful interface information for detailed landing gear structural modeling that serves other analysis purpos-
es.
Keywords: Aircraft Landing Gear; Dynamical Model; Simple Cell Mapping; Multi-objective Optimization
1. Introduction
Structural modeling and optimization are essential tasks for aircraft landing gear design, especially when consider-
ing the highly transient impact case during the landing phase. The performance metrics for landing gear design usual-
ly involves more than one objective. Therefore, it is a common practice to carry out multi-objective optimization even
at conceptual design phase. Usually, the structure dynamical modeling and multi-objectives optimization study of
Page 1 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
2
aircraft landing gear system are complicated work. Reasonable structure modeling with adequate simplification is
helpful for multi-objectives optimization design.
In regard of the structure dynamical modeling of landing gear, Milwitzky and Cook (1953) presented a two-mass
model having two degrees of freedom (DOF) to describe the landing gear in the 1950s. They divided the dropping
process into two stages, the number of DOF is one before shock absorber begins to compress and the DOF becomes
two after compression. The total axial force consisted of hydraulic force, pneumatic force, and internal friction force.
The model presented by Milwitzky and Cook has showed great effect on solving landing-gear drop dynamics
problems and has been adopted until now. Based on this model, intensive researches have been carried out to improve
this model in the past few decades. Flugge (1954) developed a three DOF system where he considered both the trans-
lational and rotational motion. Wei and Nie (2005) proposed the concept of landing region and divided the landing
process into three phases, namely, before shock absorber begins to compress, after shock absorber begins to compress
and when the landing region is restricted. Later, Wei et al. (2014) presented an improved model of landing-gear drop
dynamics. It added viscous friction, stiction, and stribeck friction on the basis of coulomb friction model and revised
the whole drop process to six phases accordingly. Jocelyn (2001) summarized the landing character of landing mod-
eling in the overview published in 2001. Nie and Wei (2013) described the landing modeling methods and simulation.
They systematically presented the methods how to analyze dynamical problem of landing gear, including carrier
based aircraft landing gears.
In the past decades, researchers’ attentions were mostly focused on the shock absorber, which is undoubtedly an
important part of landing gear. Enormous publications of shock absorber modeling and the impact force estimation
can be found from public accessible literatures. Structural limit force was modeled to simulate the structural reaction
forces when the shock strut was fully extended or compressed (Nie 1990). Wahi (1976a) took into account the snub-
ber orifice hydraulic force and treated discharge coefficients as a function of Reynolds number, orifice shape, and
orifice orientation. Oil compressibility and polytropic exponent were discussed further (Wahi 1976b). Pneumatic force
was refined, taking atmospheric pressure into account (Sui and Lu 2001). Flugge (1952) studied the buffers strut, ig-
noring the part loss of flowing oil in the model of oil damping force. Batterbee and Sims (2005) studied the nonlinear
magneto-rheological hydraulic and pneumatic landing gear dynamics. Evans et al. (2010) studied the landing gear
under the normal or abnormal conditions. Wei et al. (2014) studied the buffer friction considering the influence of
landing gear flexibility. As for tire model, some researchers simplified the tires into the mass-spring system model for
Page 2 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
the landing dynamical analysis. Others obtained the tire force from semi-empirical model or experiment model.
However, little attention has been devoted to the flexible characters of landing gear for dynamical analysis. The
two-mass dynamical model simplifies the landing gear into lumped parameter system. Despite its simplicity on cap-
turing major dynamical effect of the landing gear system, the lumped parameter model cannot reflect the stress dis-
tribution and structural deformation. Finite element modeling in associated with multibody dynamics is usually the
technique that many researchers use to compute stress distributions of the landing gear. Nevertheless, the relation-
ships between parameters and the internal mechanism of the dynamical process are difficult to acquire through such
simulations. Meanwhile the simulation results are associated with model input and parameter settings, which is usu-
ally very costly in the dynamical analysis of landing process. To somehow alleviate the formidable computational
demands for dynamical analyses, in this paper, we propose a rigid-flexible dynamical model in order to compute the
stress distribution of landing gear. The dynamical model is also adopted for structural optimization and other analysis
tasks.
Landing gear design requires intensive structural optimizations with several objectives. With respect to the mul-
ti-objectives optimization, rich literature can be found in landing gear optimization problems. Related researches can
be traced back to the 1970s when the landing gear system was optimized respectively at landing and taxiing phase
(Venkatesan and Nagaraj 1979). Kortum et al. (1996) proposed the optimization of landing gear geometric configura-
tion by considering the retract path and the kinematics during the process. Their landing gear design also involved the
optimization of shock absorber to minimize touch-down impact load. A semi-active optimal shock absorber design
scheme was proposed by Maemori et al. (2003). Vibration acceleration was picked as optimization objectives for the
control strategy and structural parameters. The optimal design is robust against different loads of cargo, fuel and pas-
sengers. Xue et al. (2012) considered the fatigue life of the landing gear structure as optimization objective, the qual-
ity of the landing gear as constraints, and applied improved particle swarm optimization algorithm for optimal design.
Nevertheless, literatures on multi-objectives optimization of landing gear are quite limited. Researches on mul-
ti-objective design that simultaneously consider the acceleration reduction, shock absorber efficiency improvement,
stress alleviation and other objectives are even more rarely seen. In many studies, the multi-objectives optimization of
landing gear are solved by transforming the optimization problem into a single-objective one, which often requires
careful weighing of various objectives. There are a number of algorithms solving multi-objective optimization prob-
lems. One robust algorithm is called the cell-to-cell mapping. Introduced by Hsu in 1980s, the cell mapping technique
Page 3 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
4
was firstly used in the global analysis of strong nonlinear systems. The combination of cell mapping and mul-
ti-objective optimization is relatively new. It is applied here for its credibility in fast and reliable global searching of
the Pareto set in multi-objective optimization problems (MOPs). From the proposed multi-objective optimal parame-
ter design, a fast parameter tuning procedure is established for landing gear design. It can save considerable amount
of time compared with the FEM based optimization. The optimal parameter set is helpful for the detailed landing gear
structural modeling that is essential for other analysis purposes.
The rest of the article is outlined as follows: Section 2 presents the dynamical model of a landing gear that con-
siders strut flexibility; Section 3 formulates the multi-objective optimization problem for landing gear structural de-
sign. Section 4 describes searching algorithm within the cell mapping framework; Section 5 presents the optimal de-
signs of the landing gear under drop test simulations. We conclude the article in Section 6.
2. Dynamical Model of Flexible Landing Gear
2.1. The dynamical equations of flexible landing gear
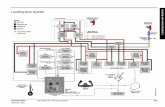
The telescopic landing gear shown in Figure 1(a) is studied in this paper. The structure of shock absorber is shown
in Figure 1(b), and the conventional two-mass model is shown in Figure 1(c). Typical lumped parameter model of
landing gear is divided into two mass blocks with the structural parts represented by each mass explained as follows
(Nie and KORTUM 2000):
(1) The upper mass supported by a spring. The upper mass models the fuselage, wings, the outer cylinder of the
shock absorber and other components;
(2) The lower mass represents piston rod, brakes and wheels.
In the model shown in Figure 1(c), the mass supported by spring is the upper mass and the mass connected to the
ground is the lower mass.
Dynamical equations of two-mass landing gear model can be readily obtained by the Newton’s law,
1 1 1
2 2 2
a l f
a l f t
M y M g F F F
M y M g F F F F
= − − −
= + + + −
&&
&& (1)
where,a
F ,l
F , f
F and t
F are the air spring force, damping force, friction, and tire reaction force, respectively. 1
M
and 2
M are the mass values of two mass blocks.
In order to obtain the structure stress and deformation of the landing gear, the inertia and stiffness information sim-
Page 4 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
plified by two mass blocks and connected springs for most conventional models is replaced by two flexible rods
herein. The structural deformation of the rods can be assumed by a linear combination of displacements at multiple
discrete points along the rod. The flexible landing gear model is depicted in Figure 2(a), and the rod discretization is
depicted in Figure 2(b). Note the upper mass block is not removed in the rigid-elastic model presented here and the
upper mass still models the inertia of related components as discussed above. The single mass block and the rods
constitute the elastic dynamical system. The strut and shock absorber are modeled as two flexible rods with length
1l and
2l . Additionally, two sets of spring-damper units are introduced at the junction of flexible rods and between rod
#2 and the ground as shown in Figure 2(a).
Let the displacement of rod #1 as 1 1( , )u z t . Under the coordinate system defined in Figure 2(a), the displacement of
two ends can be written as 1(0, )u t and 1 1
( , )u l t . Likewise, the displacement of rod #2 can be written as 2 2( , )u z t
with the displacement of ends as 2(0, )u t and 2 2
( , )u l t .The speed of rod #1 is ( )1 1,u z t t∂ ∂ ,where the speed of M is
the same as the speed of the top of rod #1. The kinetic energy of rod #1 and rod #2 are ( )( )12
1 1 1 1 10
1,
2
l
A u z t t dzρ ∂ ∂∫
and ( )( )22
2 2 2 2 20
1,
2
l
A u z t t dzρ ∂ ∂∫ .The kinetic energy of M is ( )( )2
1
10,
2M u t t∂ ∂ .Putting all kinetic energy terms
together, the kinetic energy of the system is as follows:
( ) ( ) ( )1 2
2 2 2
1 1 1 2 2
1 1 1 2 2 20 0
0, , ,1 1 1
2 2 2
l lu t u z t u z tT M A dz A dz
t t tρ ρ
∂ ∂ ∂ = + +
∂ ∂ ∂ ∫ ∫ (2)
wherei
ρ ,i
A andil ,are the material density, rod cross section area and length.
The tire is modeled by a linear spring–damper unit with 2k and 2
c as the stiffness and damping coefficient. Contact
theory is adopted here to model the tire force during impact and will be discussed in the next section. The potential
energy of tire is ( ) ( )( )2
2 2 2
1, 0,
2k u l t y t− .The strain energy due to the elastic deformation of rod #1 and rod #2 are
( )( )12
1 1 1 1 1 10
1,
2
l
E A u z t z dz∂ ∂∫ and ( )( )22
2 2 2 2 2 20
1,
2
l
E A u z t z dz∂ ∂∫ .Gravitational potential energy of rod #1 and rod
#2 are ( ) ( )( )( )1 1 1 1 1 10, , 2gA l u t u l tρ− + and ( ) ( )( )( )2 2 2 2 2 2
0, , 2gA l u t u l tρ− + . The gravitational potential energy
of M is ( )10,Mgu t− . Putting all potential energy terms together, the potential energy of the system is as follows:
Page 5 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
6
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1 2
2 2
2 1 1 2 2
2 2 2 1 1 1 2 2 20 0
1 2
1 1 1 2 2 2
1 1 1 2 2
, ,1 1 1, 0,
2 2 2
0, , 0, ,0,
2 2
l lu z t u z tV k u l t y t E A dz E A dz
z z
u t u l t u t u l tgA l Mgu t gA lρ ρ
∂ ∂ = − + + −
∂ ∂
+ + − −
∫ ∫ (3)
where i
E is the elasticity modulus of each elastic rod, ( )y t the road unevenness that is assumed to be known.
The air spring force of the shock absorber has obvious nonlinear character, so the potential energy of air spring
should be computed by the virtual work principle. The virtual work done to the system can be formulated as.
( ) ( ) ( ) ( )( )
1 1 2 1 1 2 2 2 2 2 2
1 1 2
( , ) (0, ) ( , ) (0, ) ( , ) ( ) ( , ) ( )
( , ) (0, )
a l
f
W F u l t u t F u l t u t c u l t y t u l t y t
F u l t u t
δ δ δ δ
δ
= − + − + − − +
−
& &
(4)
0
0
0
( )a
s
VF P A
V Ay
γ=−
(5)
3
2 2
02
s s
l
A y yF
A
ρ
ξ=
& &
(6)
f m s n s sF k y k y y= +& & & (7)
2 2 2 2tF k y c y= + & (8)
The parameters appear from Equation (5) to (8) are explained as follows: 0P ,
0V and A in Equation (5) are the in-
itial pressure, initial volume and cross section area of the upper gas chamber; ρ ,ζ and 0
A in Equation (6) are the
damping oil density, orifice discharge coefficient and orifice area; mk and
nk in Equation (7) are the empirical pa-
rameter to model the friction between absorber inner wall and the movable part. Denoteo
F as the strut force, we have
the relationshipo a l f
F F F F= + + . The strut force is the macroscopic indication of the gear-fuselage interaction,
which is an important cause of fuselage fatigue and damage. Let 1 2s
y z z= − be the landing gear piston stroke and
1 2sy z z= −& & & be the stroke velocity.
Denote the mass of rod #1 and #2 as 1
m and2
m . By applying the Hamilton's variational principle, the governing dy-
namical equation of the system can be written as,
+ + =Mu Cu Ku F&& & (9)
The number of rod discretization can be freely chosen. This resembles the meshing process of FEM. We are inter-
ested in studying the lower frequency vibration of landing gear. In this work, four evenly distributed points are se-
Page 6 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
lected along the rod for discretization, which consist of two middle points and two endpoints to study the dynamical
characteristics. It is obvious that in order to study higher frequency response of landing gear, the amount of discrete
points should be increased. The stress distribution at these discretization points can be easily computed once the dis-
placement is obtained. In this study, we introduce the linear interpolation scheme to compute the displacement along
the rod. The shape function has the following form when 4 points along the rod is selected,
( ) ( )( )( ) ( ) ( ) ( )( )( ) ( )( ) ( )( )( ) ( ) ( )( )( )( ) ( )
3 3
3 3
( , ) , 3 2 3 2 9 2 3, 3 2 27
3, 2 3 2 27 (0, ) 3 2 3 2 9
i i i i i i i i i i i i i i i i i i
i i i i i i i i i i i i i i i i
u z t u l t z z l z l l u l t z z l z l l
u l t z z l z l l u t z l z l z l l
= − − + − − − +
− − + − − − − (10)
where i =1, 2 represents the rod number. Local coordinate system of each rod is shown in Figure 2(a). Coefficient
matrices , , ,M C K u and F are as follows:
11 4 4 4 4 4 4 11 4 4
4 4 22 4 4 22 4 4 22
0 0 0 0, ,
0 0 0
× × × ×
× × ×
= = =
M KM C K
M C K (11)
Detail expressions of each submatrix are listed in the appendix.
2.2 Impact analysis
Aircraft landing involves in a complex impact process between landing gear tire and runway. Under many circum-
stance, the tire was modeled by either the simplified spring-damper unit or semi-empirical constitutive laws. Accord-
ing to the contact theory, when the tire contacts with the ground, the impact occurs between the tire and the ground. A
feasible assumption can be made to ignore the absorber compression since the impact is highly transient. If the impact
is perfectly elastic, the momentum and mechanical energy are conserved, hence, the tire would bounce with the same
touchdown speed. If the impact is inelastic, only the momentum is conserved, and the restitution coefficient will in-
fluence the rebound speed. As the kinematic energy is absorbed by the tire, the mechanical energy loss occurs at this
stage. During this process, if the tire has been in contact with the ground, spring-damper model dynamic equation can
be applied, the rebound speed is regarded as an initial condition of spring-damper model dynamical equation. It might
occur that when the tire has not rebounded, the shock absorber has already begun to compress. In other words, the tire
rebound and shock absorber compression occur at the same time. To take this into account, we need to introduce both
the spring-damped force and the impact force to model the landing process.
The contact collision analysis method is mainly composed of restitution coefficient method, Hertz contact theory and
finite element method (Glad G 1980, Johnson 1982, Johnson 1992). In the coefficient of restitution law, the coeffi-
cient of restitution is not easy to get. In the calculation of contact problems with finite element analysis, material and
Page 7 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
8
geometrical nonlinearities usually lead to costly simulations. In this paper, we take the improved Hertz contact theory
to calculate contact force. The normal contact force of tire i
F can be expressed as (Lankarani et al. 1994):
e
iF K Dδ δ= + &
(12)
Where K is contact stiffness, which is expressed in Equation (13),δ is deformation of impact objects, D is damping
coefficient, and e is coefficient of penetration.
216
9
REK =
(13)
where
1
1 2
1 1R
R R
−
= +
1
1 2
1 2
1 1E
E E
µ µ−
− −= + (14)
1R and 2
R are the contact radius between tire and the ground, 1µ and 2
µ are the Poisson's ratio, 1E and 2
E are the
elasticity modulus between tire and the ground.
According to Damping model (Lankarani et al. 1994), the damp coefficient is as follows ( Zhou et al. 2012):
e eD cKµδ δ= =
2
0
3(1 )
4c
v
ε−= (15)
where µ is Hysteretic Damping coefficient, ε is coefficient of restitution, and 0v is initial relative speed.
(1 )e e e
iF K c Kδ µδ δ δ δ= + = +& & (16)
Equation (16) is consistent with the aircraft tire semi-empirical model (Zhang 2009). When the tire contacts the ground,
the following contact conditions are applied,
( )impact (1 )e
F c K Lδ δ δ = + & (17)
( )0, 0
1, 0L
δδ
δ<
= ≥
where δ is deformation of impact objects ,and ( )L δ is a logic function.
The normal tire force tyre
F can be expressed as:
( )2 2
impact (1 )tyre
sd
e
F k cF
F c K L
δ δ
δ δ δ
= +=
= +
&
& (18)
Page 8 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
where sdF is the force contributed by the spring-damper model, impact
F is the force of impact model, and δ is the de-
formation of impact objects. During the first impact, impactF is applied as the force applied on the tire. If the tire is
bounced back, namely, the second impact occurs, impactF will still be used to compute the tire load. Otherwise, the
spring-damper model is utilized.
3 Performance Indices
3.1 Optimization goals
In the current paper, we propose the following four objectives expressed in Equation (19) to optimize. When the
aircraft is landing, the impact force applied on the landing gear is primary factor of the landing gear dynamics.
Thereby reducing the vibration is the main objectives at this stage. Other than vibration reduction, this paper also
focuses on considering aircraft passenger comfort, efficiency of the shock absorber, the structure of life and other
factors. Optimization objectives include: vertical vibration acceleration, the shock absorber efficiency, the average
stress of landing gear and settling time of fuselage vibration displacement to the equilibrium state.
2
1 2 3 4 1
0
( )=[ , , , ] [ , ,max , ]
fT
T T
bq F F F F a dt e tη= ∫F (19)
where a is the fuselage acceleration, η the shock absorber efficiency, 1e the average stress of #1 rod and
bt is the set-
tling time of impact induced vibration of fuselage. f
T in Equation (19) is the simulation time for drop test. In the pre-
sent paper, we set f
T =5 for integrating the dynamical equations. This time span assures the motion of fuselage is well
decayed.
(1) The vertical acceleration of the fuselage
The vertical acceleration of the fuselage is an important factor affecting passenger comfort (Liu and Ma 2010). The
acceleration produces the feeling of weightlessness and affects human sensory organs, nervous system and health.
This motivates the vibration suppression design.
(2) The shock absorber efficiency
Shock absorber efficiency is closely related to the how good vibration suppression would be during the landing
impact. The shock absorber efficiency is computed from the figure where shock load is plotted against the stroke, see
Figure 7 for example. Shock absorber efficiency is the radio of the area below the curve of the shock absorber load
to the area below a horizontal line that characterizes the maximum theoretical load.
Page 9 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
10
(3) The average stress of the landing gear
The stress is an important factor affecting the life of landing gear, thus, reducing the average stress of landing gear
is favorable for structural life extension when considering fatigues. It can be found that the stress distributions are
with the same form for both rods. We take the stress average of rod #1 as an objective.
(4) The settling time of fuselage vibration
The settling time is a key measurement on how rapid the vibration can be absorbed, which is an essential index to
characterize the system damping. Nevertheless, shorter settling time is usually achieved by allowing greater overshoot
of displacement, which is against the objective of vibration suppression. Hence, it can be seen that the proposed ob-
jectives for landing gear optimization may exist mutually conflicting natures.
It should be noticed that practical design or optimization of engineering structures often involves several conflict-
ing objectives. For instance, the vibration suppression and the settling time of landing is a pair of conflicting objec-
tive due to the constant energy that the landing gear damping unit needs to absorb. Hence, carrying out mul-
ti-objective optimization of landing gear to seek best trade-off is with great importance in real life engineering situa-
tions.
3.2 Design variables
In this study, we consider the multi-objective optimization by tuning landing gear structure and the parameters of
the tire. The design parameters are grouped into the vector:0 0 2 2
=[ , , , ]Tq p A k c .It can be found from the air polytrophic
equation that there exists a certain relationship between the initial volume of the air cavity and the initial inflation
pressure. Therefore, we choose one of the two variables to tune. The physical means of the tuning variables are ex-
plained as follows: The section area A0 refers to the landing gear shock absorber. The tire force is affected by various
factors such as inflation pressure and structure type. For simplification, we choose the stiffness coefficient and damp-
ing coefficient as representations to the tire dynamical characters.
4. Multi-objective Optimization Algorithm
The simple cell mapping (SCM) searching algorithm is employed in this paper to solve the multi-objective optimi-
zation problem Simple cell mapping is analyzed based on the unraveling algorithm developed by Hsu (1987). In the
previous study of active control optimization of landing gear vibration suppression, we adopted the simple cell map-
ping algorithm to carry out multi-objective optimization (Sun et al. 2015). In this work, we continue the application of
Page 10 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
SCM for the optimal design of the key parameters in the flexible landing gear model. The methodology introduced
here not only suits the particular landing gear optimization problem, but a computational paradigm for a wide spec-
trum of multi-objective optimization applications.
4.1. Local searching scheme
Let the vector function F defines the relationship between design parameters x and the performance indices, i.e.
F : N mR R→ , where m is the number of objectives that need to be optimized simultaneously. Without loss of gen-
erality, we assume the optimization is to seek the minimum. Recall that for single objective optimization, the gradient
of F provides the evolutionary direction in point-wise parameter space. For multi-objective optimization, Fliege and
Svaiter (2000) proposed an algorithm to calculate the search direction by solving the following single objective opti-
mization problem.
2
( , )
1min
2vv
αα + (20)
. .(J ) , 1, ,i
s t v i mα≤ = L
where J i
j
F
x
∂=
∂ is the local Jacobian matrix, v the searching direction, α the smallest reduction of objectives.
Negative α implies the searching is descending and the iteration is approaching to the optimal solution. Points that
correspond to zero α are denoted as Pareto optimal, which indicates evolution stops at that point. Equation (20) is
the primal form of the quadratic programming. Since the objective function in Equation (20) is convex, the formula-
tion has unique solution. The dual form of Equation (20) can be derived by applying the Lagrangian theory,
21min J
2
T
λλ (21)
1
. . 1, 0m
i i
i
s t λ λ=
= ≥∑
This is a quadratic programming with m variables, m linear inequalities and one equality constraint. The fmin-
con function in Matlab can help to find the solution. Relationship between the Lagrangian multiplier vector λ and
searching direction v is
JTv λ= − (22)
Step size of each iteration is computed by an Armijo-like rule. A proper step size will be accepted when the fol-
lowing condition is satisfied
Page 11 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
12
F( ) F( ) Jx tv x t vβ+ ≤ + (23)
where, β is a predefined positive number, suggested value of β is 410− . The inequality in vector form means every
component should satisfy the Armijo condition. For simple cell mapping proposed below, the initial step size for each
iteration is set as max( )h with h the vector with each component as the size of cell at each dimension. If the Armijo
condition cannot be satisfied, we choose the step size as 2t until t is small enough. Therefore, the multi-objective
steepest descent algorithm can be expressed as
( 1) ( )v
x k x k tv
+ = + (24)
Equation (24) forms a dynamical system in continuous parameter space and will be used to construct the point to
point mapping in simple cell mapping.
4.2. Simple Cell Mapping (SCM)
Let lbx and ubx be the lower and upper bound for the searching in parameter space, the point to point mapping de-
fined in Equation (25) can be written compactly in a discrete evolution process,
( )( 1) ( )x k x k+ = Φ (25)
Let the vector 1
=[ , , ]TN
n n nL denotes the division at each direction of parameter space. The length of each side of
the hypercube cell is ( )=ub lb
i i i ih x x n− . Each cell has its unique integer coordinate ( ) ( ) ( )
1=[ , , ]
j j j T
Nz z zL in the dis-
crete cellular space. The central point coordinate and an integer label represent each cell can be easily derived from
the integer coordinate by using the following relationships.
( ) ( )+(z -1) +z
j jlb lb
i i i i i i ix h x x h≤ ≤ (26)
( ) 1z
2
lbj i i
i
i
x xInt
h
−= +
(27)
( )( ) 1
1
1 1N
j i
i i
i
j i z n−
=
= = − +
∑ (28)
The SCM is constructed by applying the point-wise dynamics in cellular space. Central point of each cell is used
when constructing the one step mapping forward. The SCM can be expressed as( ) ( )( )z C zj i= , which is essentially
two integer arrays storing cell indices in computer memory.
Page 12 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
For each cell under study, we form the evolution sequence from the one step mapping C .
( ) ( ) ( )2C C C
mz z z z→ → → →L (29)
The sequence will keep generating until ( )Cm
z occurs to be out of searching boundary, coincide with another cell in
the current sequence or mingle into another processed sequence. For the first case, very cell of current sequence is
regarded as sink cell; the second case implies the discovery of a loop structure and therefore the cells consist the loop
will be labeled as Pareto optimal under current cellular space resolution; the final case indicates the current sequence
is transient and will not be considered for further refinement and finer search. During the generating of each se-
quence, three numbers are used to delineate the dynamical properties of one cell, namely, the group number ( )Gr z ,
step number ( )St z and the periodicity number ( )P z .
The subdivision technique is applied in this study for SCM searching. The core idea is to perform the SCM
searching at coarse grid initially. The cyclic structure discovered in initial search serves as the covering set for suc-
cessive search with finer cells but is only carried out within the covering set. The refinement only takes on cyclic
structures found at each searching stage. In this regard, highly accurate solution can be found without sacrificing too
much computational efficiency. Stringent proof on convergence of the subdivision technique and its various applica-
tions on multi-objective optimization can be found (Dellnitz 1997, Naranjani 2013, Xiong 2014).
4.3. Post Processing
The Pareto solutions found by the SCM algorithm usually forms a distributed set in both parameter and objective
space. These solutions are with equivalent Pareto optimality. To further choose fewer solutions for actual design or
implementation, we introduce a post processing approach here. The approach is conducted in objective space.
Let [ ]1 2P p ,p , , p R
s m
m
×= ∈L be the matrix storing s Pareto solutions in objective space, where 1p R s
i
×∈ is the
function value vector of the thi dimension. We first define the minimum and maximum point as
( ) ( ) ( ) 1
min 1 2r min p ,min p , ,min p RT m
m
×= ∈ L (30)
( ) ( ) ( ) 1
max 1 2r max p ,max p , ,max RpT m
m
×= ∈ L (31)
namely, the minimum and maximum values of the function values of Pareto points at each dimension in objective
space are taken as the components of min
r and max
r . The distance between min
r and max
r is then computed and divid-
ed by c times. The post processing starts with the ball ( )minB r ,∆ where
min maxr r c∆ = − . Any Pareto points falls
Page 13 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
14
into B will be taken into account as the P∆ solutions. Likewise, Pj∆ solutions are the Pareto points found in-
side ( )minr ,B j∆ . Since the process starts from the ideal point
minr , the smaller the radius is, the closer are the obtained
points to the so called knee points (Branke et al.2004). The post processed solutions are closer to the ideal objectives.
They provide a variety of choices with all performance indices being optimized.
5. Numerical Results
5.1 Dynamics of the rigid-flexible system
Structural parameters of the landing gear used in the analysis are listed in Table 1. Recall that four parameters are
selected in Section 3.2 as design variables for optimization. However, here we set the values of
0 0 2 2=[ , , , ]Tq p A k c fixed as shown in Table 1. The parameter values shown Table 1 will also serve as the baseline design
that will be compared with the optimized solutions. It should be noted that main purpose of this section is to verify
the feasibility of tire impact force model, which is vital to landing gear dynamics. Parameter tuning will be discussed
in the next section. Drop test simulation is carried out by numerically integrating Equation (9). The time history of
ground vertical force is shown in Figure 3. Comparisons of numerical calculation and test results are listed in Table 2.
According to Figure 3 and Table2, fairly good correlation of the impact force can be found between drop test data
and the simulation results. In this article, the two-mass model of landing gear is called conventional model. The rig-
id-flexible landing gear model with impact force is called the improved model. It can be seen from Figure 3 that the
maximum tire impact force calculated with the improved model is closer to the test result reported from the literature
(Wei et al. 2014). The relative error of improved model is 3.45% and the relative error is 26.8% for the conventional
model. This validates the impact force model proposed in Equation (18).
5.2 Optimal designs
Based on the formulation of multi-objective optimization problem defined in Section 3, the simple cell mapping
algorithm is applied to solve the multi-objective optimal design of landing gear structural parameters. The lower and
upper bounds of parameters 0 0 2 2
=[ , , , ]Tq p A k c are set as P0lb
, A0lb
, k2lb
, C2lb
and P0ub
, A0ub
, k2ub
, C2ub
and are listed
in Table 3.
The cell mapping searching for optimal solutions involves a hybrid manner as introduced in Section 4.2. For the
first searching stage, coarse partition of cellular space is set as 10 10 10 10× × × for covering set searching and the
refinement of 3 at each dimension of the candidate cells is then carried out for successive searching of finer solutions.
Page 14 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
The multi-objective optimal solutions under finer cellular space resolution consist 100 Pareto points. The Pareto front
is depicted in Figure 4 with F₁-F₄ defined in Equation (19). The color code indicates the level of F₄.
5.3 Post processing
As per the discussion at Section 4.3, we choose the division of min max
r r− as 100c = for post processing. This
leads to a reduced Pareto set that consist only 15 optimal solutions. The distribution of associated Pareto front pro-
jected to 2D objective space is shown Figure 5. For the demonstration of time domain performances after optimiza-
tion, we choose the parameter set ( )46 6 41.13 10 ,5.17 10 ,1.13 10 ,2.7 10
T− × × × × for the discussion in the next sec-
tion. It should be note that all 15 solutions are the reduced Pareto set are non-dominant to each other.
5.4 Optimization results
Figure 6 to 8 depict the comparison of dynamical performances of the baseline and optimized landing gear system.
The parameters of baseline design are shown in Table 1. From the time history of acceleration during the drop, it can
be found that the absolute value of the acceleration peak under the optimized landing gear configuration is reduced by
18% and its integration over a time span 5f
T = is reduced by 6% compared with the baseline design. Figure 7 plots
the shock absorber stroke against the strut force. The result shows that the shock absorber efficiency with the opti-
mized configuration increases by 10% with the cost of stroke increase of 19%. Lastly, we examine the time history of
maximum stress of optimized and baseline designs as shown in Figure 8. The maximum stress is reduced by 18%
with the cost of 0.53 s settling time increasing. We emphasize here that the essence of multi-objective optimization is
a complex trade-off process that involves the notion of “dominance” to verify the optimality of each optimal solution.
Usually, the reduction of one or several objectives is associated with the compromise of at least one other objective.
This is observed from Figure 7 and 8. Multi-objective optimization provides a variety of potential solutions for fur-
ther decision making. However, final choice of which optimal solution to deploy is beyond the scope of this paper.
6. Concluding Remarks
A dynamical model of aircraft landing gear is developed in this paper using Hamiltonian principle. The model in-
cludes both the lumped and distributed parameter units. Contact theory is utilized to model the impact force of tire
during landing. The force model is verified by experimental results and shows superiority than the conventional
two-mass lumped parameter models. We can carry out the multi-objective optimal design in terms of key structural
parameters via the simple cell mapping algorithm.
Page 15 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
16
With proper post processing for Pareto set selection, a candidate optimal solution is picked to examine its temporal
performances against the baseline design. According to the time domain simulation results, optimized landing gear
has the absolute value of the acceleration peak value reduced by 18%, shock absorber efficiency increased by 10%,
and the peak value of structural stress reduced by 18%.
This article provides a method that can be quickly analyzed with the discrete structure simplified response for op-
timization design and fatigue analysis. The proposed multi-objective optimal parameter design provides a fast tuning
procedure that saves considerable amount of time compared with the FEM based optimization. In addition, the opti-
mal parameter set provides useful interface information for detailed landing gear structural modeling that serves other
analysis purposes. The dynamical model from the article is accurate and functional compared with the two-mass
model which the models comparison and confirmation will be given in other article.
Acknowledgements
This study was co-supported by the Natural Science Foundation of China (Nos. 11572215 and 51275336) and Tianjin
Research Program of Application Foundation and Advanced Technology(Grant No.15JCZDJC32200)
References
Batterbee D C, Sims N D. 2005.Design and performance optimization of magneto-rhelolgical oleo-pneumatic landing gear. Pro-
ceeding of the SPIE, 77-88.
Branke J. u. r., Deb K. , Dierolf H. , Osswald M. 2004. Finding knees in multi-objective optimization, in: Proceedings of Parallel
Problem Solving from Nature-PPSN VIII, pp. 722-731.
Dellnitz M. , Hohmann A. 1997. A subdivision algorithm for the computation of unstable manifolds and global attractors, Numer-
ische Mathematik 75 (3): 293-317.
Evans P,Perhinschi M G, Mullins S. 2010.Modeling and Simulation of Tricycle Landing Gear at Normal and Abnormal Condi-
tions. AAA-2010-7618, Reston: AIAA.
Fliege, J. Svaiter, B. F. 2000.Steepest descent methods for multicriteria optimization, Math-ematical Methods of Operations Re-
search ,;51 (3): 479-494.
Flugge W. 1952.Landing-Gear Impact. NACA TN 2743.
Flugge W. 1954.The influence of wheel spin-up on landing-gear impact. NACA-TN-3217.
Glad G M L. 1980. Contact problems in the classical theory of elasticity. Sijthoff and Noorhoff .
Hsu C. S. 1987. Cell-to-Cell Mapping, Springer-Verlag, New York.
Page 16 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Jocelyn P. 2001.Overview of Landing Gear Dynamics. JOURNAL OF AIRCRAFT. 38(1):130-137.
Johnson K L. 1982. One hundred years of hertz contact. Proc. Instn. Mech. Engng., 196: pp. 363-378.
Johnson K L. 1992. Contact Mechanics. Beijing: Higher Education Press, pp. 22-24.
Kortum, W., Schwartz, W, Wentscher, H, 1996.Optimization of active vehicle suspensions with mechatronic software tools, Au-
tomatisierungstechnik, 44 (11): 513-521.
Lankarani, Hamid M., Nikravesh, Parviz E. 1994. Continuous Contact Force Models for impact Analysis in multi-body systems.
Nonlinear Dynamics. 5: 193-207.
Liu. B.K. Ma H.L. 2010. Progress of Research on Human Tolerance to Impact Acceleration Journal of Biomedical Engineering
27(2): 444-447.
Maenori, Kenichi,TanigaWa, 2003. Optimization of a semi-active shock absorber for aircraft landing gear, Transactions of the
Japan Society of Mechanical Engineerspp. 2492-2500.
Milwitzky B, Cook F E.1953.Analysis of Landing-Gear Behavior. NACA Report 1154.
Naranjani Y. , Hernández C. ,Xiong F.-R. et.al, 2013. A hybrid algorithm for the simple cell mapping method in multi-objective
optimization, in: M. E. et al. (Ed.), EVOLVE - A Bridge between Probability, Set Oriented Numerics, and Evolutionary Computa-
tion IV, Vol. 227 of Advances in Intelligent Systems and Computing, Springer International Publishing, pp. 207-223.
Nie, H. 1990. Dynamic Behavior Analysis and Design as Well as Life Prediction Method of Landing Gear, Ph.D. Dissertation,
College of Aerospace Engineering, Nanjing Univ. of Aeronautics and Astronautics, Nanjing, Jiangsu, PRC.
Nie H, KORTUM W. 2000. Analysis for aircraft taxiing at variable velocity on unevenness runway by the power spectral density
method. Transactions of Nanjing University of Aeronautics & Astronautics, 17(1): 64-70.
Nie H, Wei X H. 2013. Dynamic Design and Analysis of Aircraft Landing gear. Xi’an: Northwestern Poly technical University
Press.
Sui, F. C., Lu, H.2001. Mathematical Model Research on Aircraft Landing Gear Damper, Aircraft design, Vol. 2, 44–51.
Sun J.Q, Jia T, Xiong F.R, et al., 2015. Aircraft Landing Gear Control with Multi-Objective Optimization Using Generalized Cell
Mapping Trans Tianjin University. 21: 140-146.
Venkatesan, C., Nagaraj V.T., 1979. Optimization of aircraft undercarriages, No.79-DET-89.
Wahi, M. K. 1976a.Oleo-Pneumatic Shock Strut Dynamic Analysis and Its Real-Time Simulation, Journal of Aircraft, Vol. 13, No.
4, 303–308.
Wahi, M. K. 1976b. Oil Compressibility and Polytropic Air Compression Analysis for Oleo-Pneumatic Shock Struts, Journal of
Aircraft,Vol. 13,No. 7, 527–530.
Wei X H, Liu C L, Liu X Y. et al. 2014.Improved Model of Landing-Gear Drop Dynamics. JOURNAL OFAIRCRAFT Vol. 51,
No. 2, March–April, 695-700.
Page 17 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
18
Wei X H, Nie H. 2005.Analysis of Landing Impact Force of Aircraft Landing Gears Based on the Conception of Landing Aera.
Acta Aeronautica et Astronautica Sinica, 26(1): 8-12.
Wei X H,Song X C, Nie H, et al. 2014. Effect of shock strut flexibility on landing gear shock absorber fricition force. Acta Aer-
onautica et Astronautica Sinica, 35(6): 1604-1611.
Xiong F.-R. ,Qin Z.-C. , Xue Y. et.al, 2014. Multi-objective optimal design of feedback controls for dynamical systems with hy-
brid simple cell mapping algorithm, Communications in Nonlinear Science and Numerical Simulation , 19 (5) : 1465-1473.
Xue, C.J., Dai, J.H., Wei T, et al. 2012. Structural Optimization of a Nose Landing Gear Considering Its Fatigue Life. Journal of
Aircraft, 49(1): 225-236.
Zhang M, 2009.Research on Some Key Technologies of Aircraft Ground Dynamics. Ph.D. Dissertation. Nanjing University of
Aeronautics and Astronautics: 22-23.
Zhou Z.C., Wu X.Y., Zhang W.Q. et al. 2012. Study on contact dynamics based spring-damper mode. JOURNAL of Hubei Uni-
versity of Technology , 27(1): 125-128.
Page 18 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Table 1 Parameters of landing gear
Parameter Value Parameter Value
P0/Pa 1.5×105 A0/m
2 6.412×10
-4
V0/m3 6.88×10
-3 g/m/s
2 9.8
c2/N.s/m 2.6×104 γ 1.4
kn/N.s2/m
2 1×10
4 ζ 0.3
A/m2 1.376×10
-2 k2/N/m 1.5×10
6
km/N.s/m 7×103 Erod/GPa 210
1µ 1.6×10
6
2µ 0.16
Etire/Gpa 7.84×10-3
Eroad/GPa 20
E 1.5 ε 0.5
Table 2 Comparisons of numerical calculation and test results
Results Type FV max(N)
Test results 22800
Conventional model Results 16699
Conventional model Relative error 26.8%
Improved model Results 22014
Improved model Relative error 3.45%
Table 3 Optimization Parameters setting of landing gear
Parameter Value Parameter Value
P0lb
/Pa 1×106 P0
ub/Pa 5×10
6
A0lb
/m2 5×10
-4 A0
ub/m
2 1×10
-3
k2lb
/N/m 1×106 k2
ub/N/m 5×10
6
C2lb
/N.s/m 2×104 C2
ub/N.s/m 5×10
4
V0/m3 6.5×10
-3
Page 19 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
20
The list of figure captions
Figure 1 The conventional two-degree of freedom model of the landing gear.
Figure 2 The dynamical model of flexible landing gear. (a) flexible rod model. (b) discrete model of rods.
Figure 3 Time history of ground vertical force, where the solid line express the conventional model, the dashed line
express the improved model and the asterisk express the test result
Figure 4 Pareto front of the multi-objective optimal design of flexible landing gear model. F₁-F₄ are defined in
Equation (19). The color code indicates the level of F₄. 100 Pareto points are found under the cell space resolution of
30×30×30×30.
Figure 5 The Pareto front after post process of the multi-objective optimal design of flexible landing gear model.
F₁-F₄ are defined in Equation (19). The color code of all the figures indicates the level of F₃, F₄, F₁ and F₂. 15 Pareto
points are found after post process.
Figure 6 Comparison of fuselage acceleration before (solid line) and after the optimization (dashed line). Optimal
design is selected for the comfort character of passengers. The absolute value of the acceleration peak value is re-
duced by 18% and the integration of acceleration over a time span 5f
T = is reduced by 6%.
Figure 7 Comparison of the efficiency diagrams before (solid line) and after the optimization (dashed line). Optimal
design is selected for increasing shock absorber efficiency. The shock absorber efficiency is increased by 10%.
Figure 8 Comparison of the average stress before (solid line) and after the optimization (dashed line). Optimal design
is selected for enhancing the life of landing gear. Peak value of the average stress is reduced by 18%.
Page 20 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
The conventional two-degree of freedom model of the landing gear.
94x229mm (96 x 96 DPI)
Page 21 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
The dynamical model of flexible landing gear. (a) flexible rod model. (b) discrete model of rods.
160x152mm (96 x 96 DPI)
Page 22 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Time history of ground vertical force, where the solid line express the conventional model, the dashed line express the improved model and the asterisk express the test result
135x100mm (300 x 300 DPI)
Page 23 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Pareto front of the multi-objective optimal design of flexible landing gear model. F₁-F₄ are defined in
Equation (19). The color code indicates the level of F₄. 100 Pareto points are found under the cell space
resolution of 30×30×30×30.
111x83mm (300 x 300 DPI)
Page 24 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
The Pareto front after post process of the multi-objective optimal design of flexible landing gear model. F₁-F₄
are defined in Equation (19). The color code of all the figures indicates the level of F₃, F₄, F₁ and F₂. 15
Pareto points are found after post process.
135x100mm (300 x 300 DPI)
Page 25 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Comparison of fuselage acceleration before (solid line) and after the optimization (dashed line). Optimal design is selected for the comfort character of passengers. The absolute value of the acceleration peak value
is reduced by 18% and the integration of acceleration over a time span is reduced by 6%.
135x100mm (300 x 300 DPI)
Page 26 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Comparison of the efficiency diagrams before (solid line) and after the optimization (dashed line). Optimal design is selected for increasing shock absorber efficiency. The shock absorber efficiency is increased by
10%.
135x100mm (300 x 300 DPI)
Page 27 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Comparison of the average stress before (solid line) and after the optimization (dashed line). Optimal design is selected for enhancing the life of landing gear. Peak value of the average stress is reduced by 18%.
135x100mm (300 x 300 DPI)
Page 28 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering

Draft
Appendix
The sub-matrices appeared in Equation (9) are as follows:
1 1 1 1
1 1 1 1
11
1 1 1 1
1 1 1 1
19 3 33 8
1680 140 560 105
3 27 27 33
140 560 70 560
33 27 27 3
560 70 560 140
8 33 33 19
105 560 560 1680
M m m m m
m m m m
m m m m
m m m m
− − − −
= − −
M
2 2 2 2
2 2 2 2
22
2 2 2 2
2 2 2 2
19 3 33 8
1680 140 560 105
3 27 27 33
140 560 70 560
33 27 27 3
560 70 560 140
8 33 33 19
105 560 560 1680
m m m m
m m m m
m m m m
m m m m
− − − −
= − −
M
1 1 1 1 1 1 1 1
1 1 1 1
1 1 1 1 1 1 1 1
1 1 1 1
11
1 1 1 1 1 1 1 1
1 1 1 1
1 1 1 1 1 1 1 1
1 1 1 1
E E E E-13 54 189 148
E E E E54 -297 432 -189
1
E E E E40-189 432 -297 54
E E E E148 -189 54 13
A A A A
l l l l
A A A A
l l l l
A A A A
l l l l
A A A A
l l l l
−
=
−
K
2 2 2 2 2 2 2 2
2 2 2 2
2 2 2 2 2 2 2 2
2 2 2 2
22
2 2 2 2 2 2 2 2
2 2 2 2
2 2 2 2 2 2 2 22
2 2 2 2
E E E E-13 54 189 148
E E E E54 -297 432 -189
1
E E E E40-189 432 -297 54
E E E E148 -189 54 13 40
A A A A
l l l l
A A A A
l l l l
A A A A
l l l l
A A A Ak
l l l l
−
=
− +
K
22
2
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 c
=
C
( )
( )
1
1 1
1 1
1 1
2
2 2
2 2
2 2
0,
1( , )3
2( , )3
( , )
0,
1( , )3
2( , )3
( , )
u t
u l t
u l t
u l t
u t
u l t
u l t
u l t
=
u
( )
( ) ( )
1
1
2
2 2 2
1m g+Mg
2
0
0
1m g-
2=
1m g
2
0
0
1m g 0, 0,
2
a l f
a l f
F F F
F F F
k y t c y t
+ + + + + + +
F
&
Page 29 of 29
https://mc06.manuscriptcentral.com/tcsme-pubs
Transactions of the Canadian Society for Mechanical Engineering