Dynamic performance of di erent knee mechanisms with ...
9
Transcript of Dynamic performance of di erent knee mechanisms with ...

Scientia Iranica B (2016) 23(3), 1055{1063
Sharif University of TechnologyScientia Iranica
Transactions B: Mechanical Engineeringwww.scientiairanica.com
Dynamic performance of di�erent knee mechanismswith compliant joints
N. Ghaemia;�, H. Zohoorb and H. Ghaemic
a. Department of Mechanical Engineering, Babol Noshirvani University of Technology, Babol, Iran.b. Center of Excellence in Design, Robotics and Automation, Sharif University of Technology; Academician, The Academy of
Sciences of IR Iran.c. Department of Electrical and Electronics Engineering, Mazandaran Institute of Technology, Babol, Iran.
Received 6 June 2015; accepted 10 August 2015
KEYWORDSSix-bar linkage;Four-bar linkage;Dynamics;Prosthetic knee joint;Compliantmechanism.
Abstract. Loss of lower extremities has been one of the main problems in human life.Although most of the available knee devices are aesthetically acceptable, there is a necessityfor lighter and more compact mechanisms, especially for younger amputees. This problemcan be solved by the combining compliant mechanism design with traditional mechanismdesign methods. In this study, one group of the prosthetics that is known as the \compliantknee mechanisms" is evaluated. At �rst, the di�erent knee mechanisms, such as four-and six-bar knee linkages are investigated to calculate the values of the control moments(actuator torque). Then, the suitable location (where the actuator torque is to be exerted) isdetermined to reduce the knee control moment. Finally, the compliant joints are employedto provide the improved designs. Furthermore, an optimization method is employed todetermine the optimum values of sti�ness instead of using an experimental technique. Theobtained results show that use of the compliant joints in the knee mechanisms reduces thevalues of the control moments, signi�cantly. In fact, the compliant members decrease thepeak torques during the stance phase. Therefore, by applying a compliant joint, a higherenergy e�ciency and lighter knee mechanism can be achieved for ambulation.© 2016 Sharif University of Technology. All rights reserved.
1. Introduction
For people with an incomplete spinal cord injury, theloss of the knee is surely a substantial problem ofsecurity and energy expenditure. The optimal designof the knee mechanisms is essential to restore the lostability of the amputee's locomotion. Furthermore, inthe normal gait, energy consumption must be opti-mized [1]. The prosthesis must be a substitute for thelost limb, reproducing near to normal gait kinetics withlow energy consumption [2]. Among all the knee mech-anisms, the rigid four-bar linkage for the trans-femoralamputee has been widely applied in the prosthetic
*. Corresponding author.E-mail address: Ghaemi [email protected] (N. Ghaemi)
knees [3-15]. Several models of the lower extremityhave been investigated and simulated to improve thekinematics, dynamics, and energy expenditure patternof the prosthetic gait [16-21]. Other types of theknee mechanisms for amputees can also be consid-ered. Bene�ts associated with the Six-Bar Mechanisms(SBM) have been investigated in some knee prosthesis.Chakraborty and Patil [22] designed a particular six-bar knee joint to improve the walking and squattingpattern at the University of California, Berkeley. Theadvantages and disadvantages of the six-bar kneemechanisms have been reported [6]. In addition, thekinematic and dynamic performance of the optimizedsix-bar knee mechanism has been investigated by Jin etal. [23]. In general, the similar net joint torque patternsare more important than the kinematic patterns in

1056 N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063
the arti�cial knee design [24]. The polycentric kneesare still one of the most popular designs because ofthe stance phase stability at a lower limb. Despitetheir functional advantages for certain amputees, theyare only appropriate in a limited number of cases.This type of knee is often too heavy for infants andtoddlers; moreover, the energy cannot be stored andreleased in a controllable way [25]. These and othershortcomings of the traditional mechanism design haveencouraged researchers to seek other mechanisms forthe knee devices. The compliant mechanisms canpotentially present many advantages over rigid typemechanisms, including the part-count reduction, easierassembly, lighter weight, lower friction, and simpli�edmanufacturing processes. In general, the energy outputof the mechanisms is decreased due to friction losses,but the compliant designs waste lower amounts ofthe energy. The compliant mechanisms use exingof segments to transfer the motion or energy. Theystore and release strain energy as they move [25-31].Advances in biomechanics allow mechanical designerto produce compliant knee devices that more closelymodel the human gait. For example, Mahler [25]designed a particular compliant knee mechanism thatmay propose solutions to problems that exist for youngchildren who are just learning to walk. The compliantprosthetic knees have also been studied at BrighamYoung University's CMR under Dr. Larry Howell [29],and at the University of South Florida by AdamDaniel Roetter [30]. A compliant prosthetic ankle hasbeen investigated at BYU by Wiersdorf [32] under Dr.Howell and Dr. Magleby. Moreover, a compliant crossfour-bar knee joint was studied and analyzed for aplanar bipedal robot by Hamon and Aoustin [33].
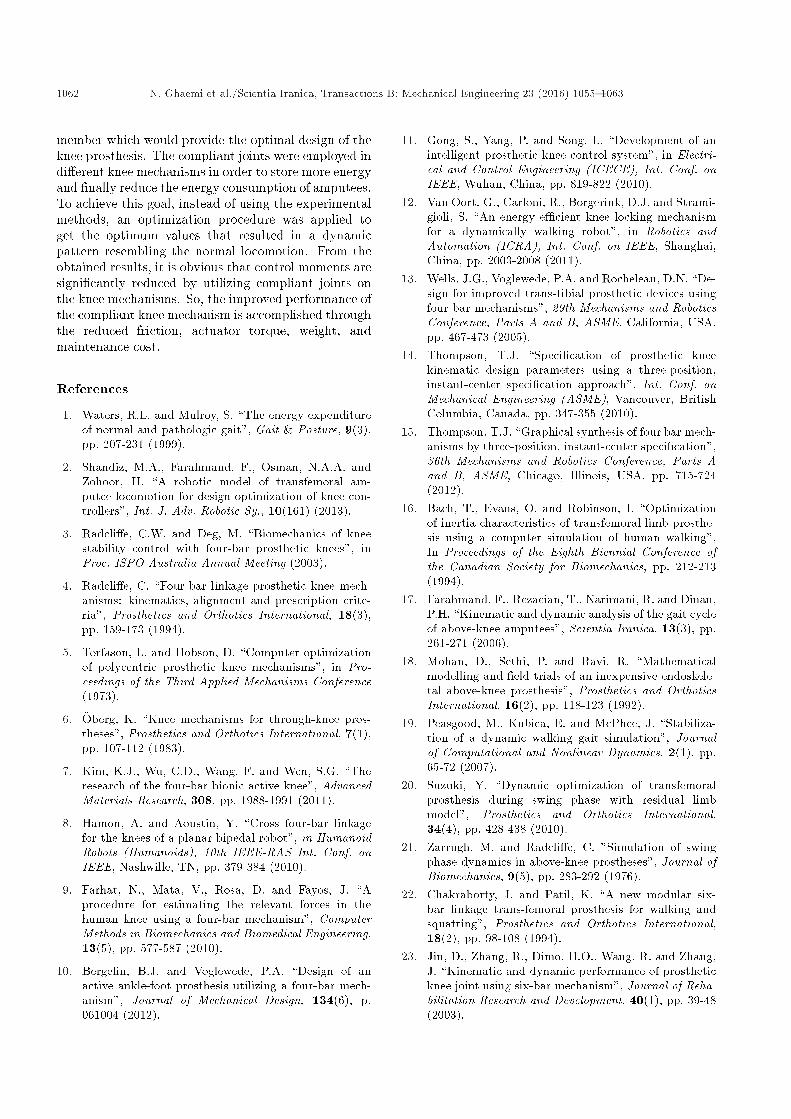
The primary objective of this paper is to comparethe e�ect of the compliant joints on dynamic perfor-mance of the di�erent knee mechanisms, especiallythe e�ect on the work done on the knee joint, inorder to rehabilitate and restore the amputee's abilityof walking. At �rst, �ve di�erent knee structures,including four six-bar linkages and one conventionalfour-bar mechanism, are studied to achieve actuatortorques during the complete gait cycle. Additionally,dynamic analysis is applied to determine the mostsuitable axis for knee actuator torques. In the nextstep, compliant joints are employed to enhance thedynamic performance of the di�erent knee mechanismsand make a comparison during the gait cycling. Mean-time, the proper location of the compliant joints duringdesign is determined to reduce the required actuatortorques. This study shows that the joint compliancecontributes to reduction in the energy consumption ofthe prosthetic gait, especially in the standing phase.Finally, among all compliant knee mechanisms, thebest compliant knee linkage is chosen to achieve mini-mal energy consumption during the locomotion cycle.
2. Methods
2.1. Dynamic analysis of the rigid kneemechanisms
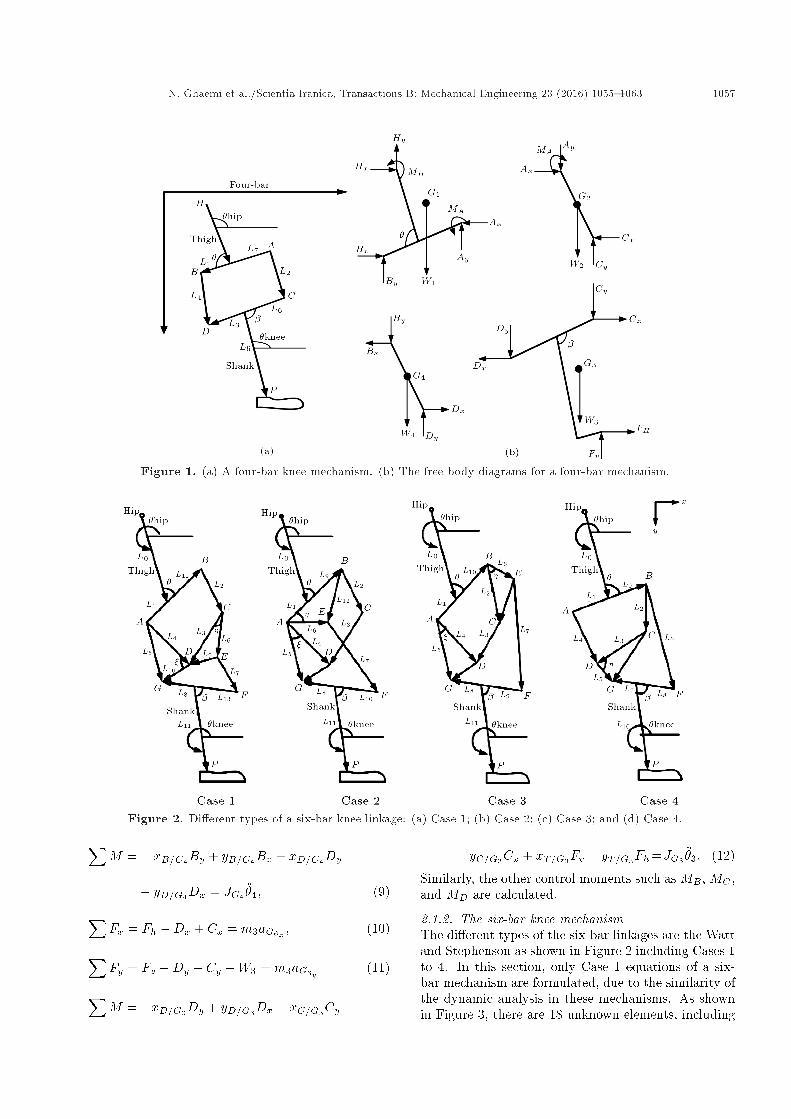
2.1.1. Four-bar knee mechanismThis section focuses on the dynamic analysis of thepresent study to achieve the desired values of controlmoments. Moreover, the proper axis is determined tominimize the control moment during the gait cycle.For dynamic study, all the kinematic parameters,such as the length and weight of all links, angularpositions, velocities, and accelerations are assumedto be known [34,35]. This data has been obtainedfrom the locomotion of a normal man walking at theconstant speed (1 m/s). The equations of motion forthe mechanisms are derived by using the Newton'slaws.
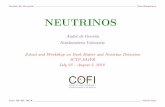
A schematic of the four-bar knee linkage to sim-ulate the human locomotion is shown in Figure 1(a).There are 12 unknown parameters, including the re-action forces at the pin joints, the hip moment, andthe control moment. The vertical and horizontalcontact forces (Ground Reaction Forces (GRF)) werecalculated by using the experimental results (for thebody weight of about 700N) and the coulomb frictionmodels, respectively [36].
To describe the dynamic process, �rst, the actu-ator torque is assumed to be applied on the joint A.By using the Newton's laws for free-body-diagram ofthe four-bar knee in Figure 1(b) and solving Eqs. (1)-(12), simultaneously, unknown values, particularly thecontrol moment at pin A, MA, are determined:X
Fx = Hx +Bx �Ax = (mL0 +mL1)aG1x; (1)X
Fy=Hy+By+Ay�W1 =(mL0 +mL1)aG1y; (2)X
M =MA +Mh + xh=G1Hy � yh=G1Hx
+ xA=G1Ay + yA=G1Ax + xB=G1By
� yB=G1Bx = JG1��h; (3)X
Fx = Ax � Cx = m2aG2x; (4)X
Fy = Cy �Ay �W2 = m2aG2y; (5)X
M =� xB=G2Ay � yB=G2Ax + xC=G2Cy
+ yC=G2Cx = JG2��2; (6)X
Fx = �Bx +Dx = m4aG4x; (7)X
Fy = �By +Dy �W4 = m4aG4y; (8)
N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063 1057
Figure 1. (a) A four-bar knee mechanism. (b) The free body diagrams for a four-bar mechanism.
Figure 2. Di�erent types of a six-bar knee linkage: (a) Case 1; (b) Case 2; (c) Case 3; and (d) Case 4.XM =� xB=G4By + yB=G4Bx + xD=G4Dy
� yD=G4Dx = JG4��4; (9)X
Fx = Fh �Dx + Cx = m3aG6x; (10)X
Fy = Fv �Dy � Cy �W3 = m3aG6y(11)X
M = �xD=G3Dy + yD=G3Dx � xC=G3Cy
�yC=G3Cx + xT=G3Fv � yT=G3Fh=JG3��3: (12)
Similarly, the other control moments such as MB , MC ,and MD are calculated.
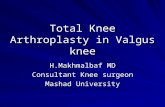
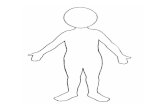
2.1.2. The six-bar knee mechanismThe di�erent types of the six-bar linkages are the Wattand Stephenson as shown in Figure 2 including Cases 1to 4. In this section, only Case 1 equations of a six-bar mechanism are formulated, due to the similarity ofthe dynamic analysis in these mechanisms. As shownin Figure 3, there are 18 unknown elements, including

1058 N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063
Figure 3. The free body diagrams for Case 1 of a six-barmechanism.
the reaction forces at the pin joints, the hip moment,and the control moment. By considering the free bodydiagrams for Case 1 of a six-bar mechanism in Figure 3and applying the Newton's laws, the control momentMA can be determined as follows:X
Fx = Hx �Bx +Ax = (mL0 +mL1)aG1x; (13)X
Fy=Hy+By+Ay �W1 =(mL0 +mL1)aG1y; (14)X
M =MA +Mh + xh=G1Hy � yh=G1Hx
+ xA=G1Ay � yA=G1Ax + xB=G1By
+ yB=G1Bx = JG1��h; (15)X
Fx = Bx � Cx = m2aG2x; (16)X
Fy = Cy �By �W2 = m2aG2y; (17)X
M =� xB=G2By � yB=G2Bx + xC=G2Cy
+ yC=G2Cx = JG2��2; (18)X
Fx = Cx + Ex �Dx = m3aG3x; (19)X
Fy = �Cy + Ey +Dy �W3 = m3aG3y(20)X
M =xE=G3Ey�yE=G3Ex�xC=G3Cy�yC=G3Cx
+xD=G3Dy+yD=G3Dx=JG3��3; (21)X
Fx = �Ax +Dx +Gx = m4aG4x; (22)
XFy = �Ay �Dy +Gy �W4 = m4aG4y
; (23)XM =�MA � xA=G4Ay + yA=G4Ax � xD=G4Dy
� yD=G4Dx + xG=G4Gy � yG=G4Gx
= JG4��4; (24)X
Fx = �Ex � Fx = m5aG5x; (25)X
Fy = �Ey + Fy �W5 = m5aG5y; (26)X
M =� xE=G5Ey + yE=G5Ex + xF=G5Fy
+ yF=G5Fx = JG5��5; (27)X
Fx = Fx + Fh �Gx = m6aG6x; (28)X
Fy = �Fy + Fv �Gy �W6 = m6aG6y; (29)X
M =� xG=G6Gy + yG=G6Gx � xF=G6Fy
� yF=G6Fx + xT=G6Fv � yT=G6Fh
= JG6��6: (30)
By utilizing the same procedure, the required actuatortorque, MB , MG, and MF , can be calculated, too.
2.2. Dynamic analysis of the knee mechanismsby using the compliant joint
In this section, the compliant joint should be substi-tuted in the knee mechanism, in order to get the loweractuator torque. The compliant knee mechanisms arethe structures that obtain some of their motions fromthe stored strain energy of the exible members; as aresult, the input torque values are reduced. The properlocation and the optimum sti�ness of the compliantjoint during design should be determined to achievethe minimum control moment. In order to achieve thisgoal, the optimization techniques can be used.
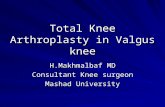
2.2.1. The compliant four-bar knee mechanismAs shown in Figure 4(a), the joint B is assumed as thecompliant joint. Thus, by considering the e�ect of thetorsional torque in Eqs. (3) and (9), the new equationsare given as follows:X
M =MA +Mh + xh=G1Hy � yh=G1Hx
+ xA=G1Ay + yA=G1Ax + xB=G1By
� yB=G1Bx �KC14�(�1 � �4) = JG1��h;(31)

N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063 1059
Figure 4. (a) The compliant four-bar knee mechanism.(b) The compliant six-bar knee mechanism 1.X
M =� xB=G4By + yB=G4Bx + xD=G4Dy
� yD=G4Dx + KC14� (�1 � �4)
= JG4��4; (32)
where, KC14 is obtained through the optimization pro-cedures and known as the spring constant. The otherequations are similar to the rigid knee mechanism.
The objective function in the optimization prob-lem is de�ned to minimize the work done by the controlmoments during the locomotion cycle and expressed asfollows:
minF (x) =nXi=1
jMBi(�1i � �4i)j ; (33)
where, n = 21 is the selected point number in alocomotion cycle. MBi, �1i, and �4i are the inputcontrol moment on the joint B, the angular positions ofthe link 1 and link 2 during the gait cycle, respectively.
2.2.2. The compliant six-bar knee mechanismAs shown in Figure 4(b), for Case 1 of the six-barknee mechanism, the joint G is considered to be thecompliant joint. So, by substituting the e�ect of thetorsional torque and putting it in Eqs. (24) and (30) asfollows:X
M =�MA�xA=G4Ay+yA=G4Ax�xD=G4Dy
� yD=G4Dx + xG=G4Gy � yG=G4Gx
+KC46�(�6 � �4) = JG4��4; (34)X
M = �xG=G6Gy + yG=G6Gx � xF=G6Fy
� yF=G6Fx + xT=G6Fv � yT=G6Fh
�KC46�(�6 � �4) = JG6��6; (35)
and by applying the same optimization procedure andde�ning the objective function as follows:
minF (x) =nXi=1
jMAi(�1i � �4i)j; (36)
the proper location and the optimum sti�ness areobtained. Thus, the spring constants and their appro-priate location are determined by solving the similarequations in other six-bar knee mechanisms.
3. Results and discussion
In this section, the dynamic design curves of the kneemechanisms are shown and their dynamic performanceis evaluated.
3.1. The dynamic performance of the rigidknee mechanism
As shown in Figure 5, in a four-bar knee mechanism,the values of MD are signi�cantly smaller than those ofMB ; as a result, the axis D is selected as the best placefor applying the control moment. Figure 6(a) shows thecalculated values of MA, MB , MG and MF , in Case 1of a six-bar. In this �gure, MA is the smallest controlmoment. So, the axis A is the best location to applythe control moment. In Figure 6(b), MA is smallerthan other control moments; therefore, the joint Ais the proper location to exert the control moment.Figure 7(a) shows the minimum control moment at thejoint B. From Figure 7(b), it is identi�ed that MGis the smallest control moment during the gait cycle.Thus, the joint G is the proper location to exert thecontrol moment.
Figure 5. The values of the control moments in afour-bar knee mechanism.

1060 N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063
Figure 6. (a) The values of the control moments inCase 1 of a six-bar knee mechanism. (b) Case 2 of asix-bar knee mechanism.
3.2. The dynamic performance of thecompliant knee mechanism
As shown in Figure 8, totally, by using the compliantjoint B, the control moment, MD, has been decreasedin a four-bar knee mechanism. In Figures 9 and 10,the control moments, MA, are reduced by addingthe compliant joint G, Cases 1 and 2 of a six-bar,respectively. Figure 11 shows that the control moment,MB , is considerably decreased when the compliantjoint A is added to Case 3 of a knee six-bar mechanism.From Figure 12 it is observed that the control moment,MG, is decreased by applying the compliant joint G inCase 4 of a six-bar.
As shown in Table 1, the optimum values for thetorsional sti�ness of the joints have been determined.Moreover, the values of the stored energy have beencalculated in the di�erent knee mechanisms. FromTable 1, it is con�rmed that the dynamic performance
Figure 7. (a) The values of the control moments inCase 3 of a six-bar knee mechanism. (b) Case 4 of asix-bar knee mechanism.
Figure 8. The values of the control moments in thecompliant four-bar knee mechanism.

N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063 1061
Table 1. Results of the compliant mechanisms.
Types ofthe knee
mechanisms
Rigid: theabsolute magnitude
of the maximumtorque (N.M)
Thecompliant
joint
Compliant: theabsolute magnitude
of the maximumtorque (N.M)
Springconstant
(N.M/Rad)
Percent ofthe storedenergy (%)
Four-bar 112 B 72 124.57 17.5Six-bar Case 1 443 G 280 91.76 21.34Six-bar case 2 153 G 112 324.7 17Six-bar Case 3 167 A 102 205.96 25Six-bar case 4 175 G 168 28.5 11.61
Figure 9. The values of the control moments for Case 1of the compliant six-bar knee mechanism.
Figure 10. The values of the control moments for Case 2of the compliant six-bar knee mechanism.
of the six-bar knee mechanisms in Case 3 is better thanthat of the other six-bar knee mechanisms, due to themore stored energy during the locomotion cycle (thepercent of the stored energy = 25). In the same designconditions, a four-bar knee mechanism is better thana six-bar knee mechanism, due to the smaller controlmoments.
Figure 11. The values of the control moments for Case 3of the compliant six-bar knee mechanism.
Figure 12. The values of the control moments for Case 4of the compliant six-bar knee mechanism.
4. Conclusion
Since the energy requirements of the prosthetic gait intrans-femoral amputees are greater than normal, thereis a need for knee design with low energy expenditure.Therefore, the main objective of this study was todevelop a rigid knee mechanism by adding a compliant
1062 N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063
member which would provide the optimal design of theknee prosthesis. The compliant joints were employed indi�erent knee mechanisms in order to store more energyand �nally reduce the energy consumption of amputees.To achieve this goal, instead of using the experimentalmethods, an optimization procedure was applied toget the optimum values that resulted in a dynamicpattern resembling the normal locomotion. From theobtained results, it is obvious that control moments aresigni�cantly reduced by utilizing compliant joints onthe knee mechanisms. So, the improved performance ofthe compliant knee mechanism is accomplished throughthe reduced friction, actuator torque, weight, andmaintenance cost.
References
1. Waters, R.L. and Mulroy, S. \The energy expenditureof normal and pathologic gait", Gait & Posture, 9(3),pp. 207-231 (1999).
2. Shandiz, M.A., Farahmand, F., Osman, N.A.A. andZohoor, H. \A robotic model of transfemoral am-putee locomotion for design optimization of knee con-trollers", Int. J. Adv. Robotic Sy., 10(161) (2013).
3. Radcli�e, C.W. and Deg, M. \Biomechanics of kneestability control with four-bar prosthetic knees", inProc. ISPO Australia Annual Meeting (2003).
4. Radcli�e, C. \Four-bar linkage prosthetic knee mech-anisms: kinematics, alignment and prescription crite-ria", Prosthetics and Orthotics International, 18(3),pp. 159-173 (1994).
5. Torfason, L. and Hobson, D. \Computer optimizationof polycentric prosthetic knee mechanisms", in Pro-ceedings of the Third Applied Mechanisms Conference(1973).
6. �Oberg, K. \Knee mechanisms for through-knee pros-theses", Prosthetics and Orthotics International, 7(1),pp. 107-112 (1983).
7. Kim, K.J., Wu, C.D., Wang, F. and Wen, S.G. \Theresearch of the four-bar bionic active knee", AdvancedMaterials Research, 308, pp. 1988-1991 (2011).
8. Hamon, A. and Aoustin, Y. \Cross four-bar linkagefor the knees of a planar bipedal robot", in HumanoidRobots (Humanoids), 10th IEEE-RAS Int. Conf. onIEEE, Nashwille, TN, pp. 379-384 (2010).
9. Farhat, N., Mata, V., Rosa, D. and Fayos, J. \Aprocedure for estimating the relevant forces in thehuman knee using a four-bar mechanism", ComputerMethods in Biomechanics and Biomedical Engineering,13(5), pp. 577-587 (2010).
10. Bergelin, B.J. and Voglewede, P.A. \Design of anactive ankle-foot prosthesis utilizing a four-bar mech-anism", Journal of Mechanical Design, 134(6), p.061004 (2012).
11. Gong, S., Yang, P. and Song, L. \Development of anintelligent prosthetic knee control system", in Electri-cal and Control Engineering (ICECE), Int. Conf. onIEEE, Wuhan, China, pp. 819-822 (2010).
12. Van Oort, G., Carloni, R., Borgerink, D.J. and Strami-gioli, S. \An energy e�cient knee locking mechanismfor a dynamically walking robot", in Robotics andAutomation (ICRA), Int. Conf. on IEEE, Shanghai,China, pp. 2003-2008 (2011).
13. Wells, J.G., Voglewede, P.A. and Rocheleau, D.N. \De-sign for improved trans-tibial prosthetic devices usingfour bar mechanisms", 29th Mechanisms and RoboticsConference, Parts A and B, ASME, California, USA,pp. 467-473 (2005).
14. Thompson, T.J. \Speci�cation of prosthetic kneekinematic design parameters using a three-position,instant-center speci�cation approach", Int. Conf. onMechanical Engineering (ASME), Vancouver, BritishColumbia, Canada, pp. 347-355 (2010).
15. Thompson, T.J. \Graphical synthesis of four bar mech-anisms by three-position, instant-center speci�cation",36th Mechanisms and Robotics Conference, Parts Aand B, ASME, Chicago, Illinois, USA, pp. 715-724(2012).
16. Bach, T., Evans, O. and Robinson, I. \Optimizationof inertia characteristics of transfemoral limb prosthe-sis using a computer simulation of human walking",In Proceedings of the Eighth Biennial Conference ofthe Canadian Society for Biomechanics, pp. 212-213(1994).
17. Farahmand, F., Rezaeian, T., Narimani, R. and Dinan,P.H. \Kinematic and dynamic analysis of the gait cycleof above-knee amputees", Scientia Iranica, 13(3), pp.261-271 (2006).
18. Mohan, D., Sethi, P. and Ravi, R. \Mathematicalmodelling and �eld trials of an inexpensive endoskele-tal above-knee prosthesis", Prosthetics and OrthoticsInternational, 16(2), pp. 118-123 (1992).
19. Peasgood, M., Kubica, E. and McPhee, J. \Stabiliza-tion of a dynamic walking gait simulation", Journalof Computational and Nonlinear Dynamics, 2(1), pp.65-72 (2007).
20. Suzuki, Y. \Dynamic optimization of transfemoralprosthesis during swing phase with residual limbmodel", Prosthetics and Orthotics International,34(4), pp. 428-438 (2010).
21. Zarrugh, M. and Radcli�e, C. "Simulation of swingphase dynamics in above-knee prostheses", Journal ofBiomechanics, 9(5), pp. 283-292 (1976).
22. Chakraborty, J. and Patil, K. \A new modular six-bar linkage trans-femoral prosthesis for walking andsquatting", Prosthetics and Orthotics International,18(2), pp. 98-108 (1994).
23. Jin, D., Zhang, R., Dimo, H.O., Wang, R. and Zhang,J. \Kinematic and dynamic performance of prostheticknee joint using six-bar mechanism", Journal of Reha-bilitation Research and Development, 40(1), pp. 39-48(2003).

N. Ghaemi et al./Scientia Iranica, Transactions B: Mechanical Engineering 23 (2016) 1055{1063 1063
24. Font-Llagunes, J.M., P�amies-Vil�a, R., Alonso, J. andLugr��s, U. \Simulation and design of an active orthosisfor an incomplete spinal cord injured subject", Proce-dia IUTAM, 2, pp. 68-81 (2011).
25. Mahler, S., Compliant Pediatric Prosthetic Knee, Uni-versity of South Florida (2007).
26. Roetter, A.D., Lusk, C.P. and Dubey, R. \Bistablecompliant extension aid for a polycentric prostheticknee", 33rd Mechanisms and Robotics Conference,Parts A and B, ASME, California, USA, pp. 241-248(2009).
27. Harrison, D.G., Andrysek, J. and Cleghorn, W.L.\Feasibility and design of a low-cost prosthetic kneejoint using a compliant member for stance-phase con-trol", Journal of Medical Devices, 4(2), p. 027541(2010).
28. Krishnan, G., Rank, R., Rokosz, J., Carvey, P. andKota, S. \A strength based approach for the synthesisof a compliant nonlinear spring for an orthotic kneebrace", 37th Mechanisms and Robotics Conference,ASME, Portland, Oregon, USA, p. V06AT07A033(2013).
29. Gu�erinot, A.E., Magleby, S.P. and Howell, L.L. \Pre-liminary design concepts for compliant mechanismprosthetic knee joints", 28th Biennial Mechanisms andRobotics Conference, Parts A and B, ASME, Salt LakeCity, Utah, USA, pp. 1103-1111 (2004).
30. Roetter, A.D., Compliant Prosthetic Knee ExtensionAid: A Finite Elements Analysis Investigation ofProprioceptive Feedback During the Swing Phase ofAmbulation, University of South Florida (2008).
31. Sigmund, O. \On the design of compliant mechanismsusing topology optimization", Journal of StructuralMechanics, 25(4), pp. 493-524 (1997).
32. Wiersdorf, J., Preliminary Design Approach for Pros-thetic Ankle Joints Using Compliant Mechanisms,Brigham Young University (2005).
33. Hamon, A. and Aoustin, Y. \Compliance for a crossfour-bar knee joint", 14th Int. Conf. on Climbingand Walking Robots and the Support Technologies forMobile Machines, Paris, France, pp. 743-750 (2011).
34. Low, K. \Subject-oriented overground walking patterngeneration on a rehabilitation robot based on foot andpelvic trajectories", Procedia IUTAM, 2, pp. 109-127(2011).
35. Ghaemi, N., Dardel, M., Ghasemi, M.H., Mohammadi,H. and Zohoor, H. \Optimization of six bar knee link-age for stability of knee prosthesis", Majlesi Journal ofMechatronic Systems, 1(4), pp. 38-45 (2013).
36. Vaughan, C.L., Davis, B.L. and O'connor, J.C., Dy-namics of Human Gait, In Human Kinetics Publishers,2nd Ed., South Africa, Mills Litho, Cape Town (1999).
Biographies
Narjes Ghaemi was graduated at BS level in Me-chanical Engineering, Heat and Fluid, from BabolNoshirvani University of Technology in 2008. In 2013,she received her MS degree in Mechanical Engineering,Applied Design, from the same university. Her favoriteresearch topics include biomechanics, robotics, dynam-ics, and kinematics.
Hassan Zohoor was born in Esfahan, in 1945. Hereceived his PhD from Purdue University, USA, andspent his postdoctoral time at the same university.Currently, he is Distinguished Professor of MechanicalEngineering at Sharif University of Technology, Aca-demician and Rector of Center for Science and Tech-nology Studies of The Academy of Sciences in IR Iran,and also Member of Executive Board of the Associationof Academies and Societies of Sciences in Asia. Hehas been the author or co-author of over 460 scienti�cpapers. He has also supervised over 200 graduatetheses. He was President of Shiraz University, and alsothe founder, president, and developer of principal codesand regulations of Payame Noor University. He hasalso been the recipient of several honors and awardssuch as Allameh Tabatabaei, special award of NationalElite Foundation, the Award of Distinguished Professorof Iran, and Ross Ade Award at Purdue University,USA.
Hajar Ghaemi was graduated at BS level in Elec-trical and Electronics Engineering from MazandaranInstitute of Technology in 2011. She is currently anMS student of Electronics, and her favorite researchtopics include bioelectrical.