Dynamic Collaborative Cloud Service Platform
4
Click here to load reader
-
Upload
aditzaster -
Category
Documents
-
view
217 -
download
0
Transcript of Dynamic Collaborative Cloud Service Platform

8/9/2019 Dynamic Collaborative Cloud Service Platform
http://slidepdf.com/reader/full/dynamic-collaborative-cloud-service-platform 1/4

8/9/2019 Dynamic Collaborative Cloud Service Platform
http://slidepdf.com/reader/full/dynamic-collaborative-cloud-service-platform 2/4
ETRI Journal, Volume 32, Number 4, August 2010 Changwoo Yoon et al. 635
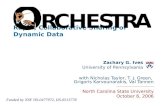
Fig. 1. Proposed CACM model to enable a DC platform among CPs.
Personal user
Enterprise user
Broker 1
CP 1
CP 2
CP 3
CP 4CP 5
Submittingsingle bid
Submittinggroup bid as
single bid
Submitting group bid as
single bid
CACMand auctioneer
eContract(Soft contract)
Broker N
eContract(Soft contract)
Negotiationmodule
Negotiationmodule
organization (VO)-based DC platform with other collaboratorCPs for providing a set of services to various consumers. Usersinteract transparently with the DC platform by requestingservices through a service catalog of the pCP. The requestedservice requirements (single, multiple, or collaborative cloudservices) are served either directly by the pCP or by anycollaborating CPs within a DC.
The proposed combinatorial auction-based cloud market(CACM) model to enable this DC platform among CPs is
shown in Fig. 1. The existing auction policy of the CA ismodified in the CACM model to address the issue of conflictminimization among providers in a DC platform. The CACMmodel allows any CP to dynamically collaborate withappropriate partner CPs to form groups. It also allows for
publication of their group bids as a single bid to completelyfulfill the consumer service requirements while supporting theother CPs to submit bids separately for a partial set of services.This new approach can create more opportunities to winauctions for the group since collaboration costs, negotiationtime, and conflicts among CPs can be minimized. As shown in
Fig. 1, the main participants in the CACM model are brokers,users/consumers, cloud service providers, and auctioneers. Weuse the auction scheme based on [3] to address the CACMmodel.
III. Model of CP Partner Selection for pCP
Finding a good combination of CP partners required formaking groups and reducing conflicts is a complex problemthat has been considered to be NP-hard. Also, the partnerselection problem (PSP) for CPs in the CACM model isdifferent from other PSP problems in areas like manufacturing,
supply chains, or virtual enterprise due to the inherentmultiparty nature of the negotiation in DC. Since every CP hasto review the contract and agree with the resources/servicescontributed by every other CP, there can be a large number of
conflicts (or disagreements) among participating CPs. Existingmethods of using individual information (INI) to select partnerscannot be applied directly to solve the PSP problem of CPs. We
propose that past collaborative relationship information (PRI) between partners needs to be considered. In fact, the success of past relations between participating CPs may reduceuncertainty and conflicts, shorten the adaptationduration/negotiation time, and help with performance
promotion. We propose a multi-objective (MO) optimizationmodel of quantitatively evaluating partners using their INI andPRI. All of this information can be obtained from each CP’swebsite, from the market, and also from consumer feedbackabout their services. The parameters for MO partner selectionare defined as follows: •
rjφ is the price of CP r for providing service j independently.•
rjQ is the quality value for service j of CP r . Qualitativeinformation can be expressed by the assessment values from1 to 10 (1= very bad, 10 = very good).
•,rj xiW is the value of past collaboration experience, that is, the
number of times collaboratively winning an auction, between provider r for service j and provider x for service i, where
, 1, , and , 1, , , .r x m i j n i j= = ≠ • { 1, , , 1, , } rjU U r m j n= = = is
a decision vector of the
partner selection.To solve the partner selection problem of a pCP using the INI
and PRI, an MO optimization model can be expressedmathematically as
1 1
minimize Obj_1 (Price) ,n m
rj rj j r
U φ = =
= ∑∑ (1)
1 1
maximize Obj_2 (Quality) ,n m
rj rj j r
Q U = =
= ∑∑ and (2)
,, 1 , 1
maximize Obj_3 (PR Performance) ,n m
rj xi rj xii j r xi j
W U U = =
≠
= ∑ ∑
(3)
subject to
if choose
otherwise,
1 ,
0rj
rj
P U = &
if choose and
otherwise.
1 ,
0rj xi
rj xi
P P U U =
To solve the above model, an MO genetic algorithm(MOGA) that uses INI and PRI, called MOGA-IC, isdeveloped. In order to find an appropriate diversity-
preservation mechanism in selection operators to enhance theyield of Pareto optimal solutions during optimization, we

8/9/2019 Dynamic Collaborative Cloud Service Platform
http://slidepdf.com/reader/full/dynamic-collaborative-cloud-service-platform 3/4
636 Changwoo Yoon et al. ETRI Journal, Volume 32, Number 4, August 2010
utilize two popular MOGAs to develop MOGA-IC, the non-dominated sorting genetic algorithm (NSGA-II) and thestrength Pareto evolutionary genetic algorithm (SPEA2) [4],[5]. Natural number encoding is adopted to represent the
chromosome of an individual. A chromosome of an individualis an ordered list of CPs. Let 1 2[ , , , , , ], j n y y y y y=
1, 2, , , and j j n y= be a gene of the chromosome, with itsvalue between 1 and m (for service j, there are m CPs for aresponse). If m= 50 and n= 5, there may be 10 CPs that can
provide each service j. Thus, a total of 10 5 possible solutionsare available. In this way, the initial populations are generated.A two-point crossover is employed, and in the case of amutation, one provider is randomly changed for any service.
IV. Simulation Results
Table 1 shows simulation runtimes of both MOGA-IC with NSGA-II and MOGA-IC with SPEA2 for three simulationexamples where R is collaborative service requirements, m is
providers, G is genetic generations, N is population size, Pc iscrossover probability, and Pm is mutation probability. We cansee from Table 1 that MOGA-IC with NSGA-II runs much fasterthan does MOGA-IC with SPEA2. The reason for this behavior isthe time consumption in the truncation approach. The timeconsumption of NSGA-II truncation approach (crowdingdistance) is much lower than that of SPEA2 (nearest neighbor).
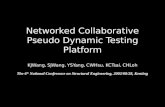
It can be seen from Fig. 2 that SPEA2 initially finds better
solutions more quickly than NSGA-II, but in the end cannot provide the best solutions. SPEA2 yields Pareto fronts withwider spans, while NSGA-II distributes solutions in a morefocused manner. Thus, we find that NSGA-II is the appropriatealgorithm to develop MOGA-IC. Figure 3 shows a
performance comparison of MOGA-IC with the existingMOGA-I algorithm, which only considers INI for partnerselection. MOGA-I was also implemented with NSGA-II. The
pCP uses both MOGA-IC and MOGA-I algorithms to makegroups and joins various auctions in the CACM model. In oursimulation, 1000 auctions were generated for different R. We
can see from Fig. 3 that using the MOGA-IC approach, pCP
Table 1. Simulation runtimes of three examples with MOGA-IC parameters.
Runtime (ms)Simulationexamples m R N G Pc
Pm
NSGA-II SPEA2
1 35 5 50 20 0.9 0.1 16.823 25.036
2 100 5 100 50 0.9 0.1 123.60 261.80
3 100 5 100 100 0.9 0.1 298.83 450.01
Fig. 2. Average optimized values of different objective functionsin the first front of MOGA-IC with NSGA-II and SPEA2for 100 generations.
0 20 40 60 80 1000.0
0.3
0.6
0.9
1.2
1.5
1.8
2.1
P r i c e
v a l u e
Number of generations
MOGA-IC with NSGA-II
MOGA-IC with SPEA2
0 20 40 60 80 100
3.0
3.3
3.6
3.9
4.2
Q u a l i t y v a l u e
Number of generations
MOGA-IC with NSGA-II
MOGA-IC with SPEA2
0 20 40 60 80 100
5.4
5.7
6.0
6.3
6.6
P R p e r f o r m a n c e v a l u e
Number of generations
MOGA-IC with NSGA-II
MOGA-IC with SPEA2
(a)
(b)
(c)
Fig. 3. Comparison of MOGA-IC with MOGA-I in terms ofwinning auctions.
100 200 300 400 500 600 700 800 900 1,0000
5
10
15
20
25
N u m
b e r o f w
i n n i n g a u c t i o n s
Number of auctions
MOGA-IC
MOGA-I

8/9/2019 Dynamic Collaborative Cloud Service Platform
http://slidepdf.com/reader/full/dynamic-collaborative-cloud-service-platform 4/4
ETRI Journal, Volume 32, Number 4, August 2010 Changwoo Yoon et al. 637
wins more auctions in comparison to the MOGA-I approach.
V. Conclusion
This letter presents a novel CA-based cloud market modelthat enables a DC platform among CPs. A new MOoptimization model of partner selection using the individualand past collaborative information is also presented. Aneffective MOGA called MOGA-IC with NSGA-II is thendeveloped to solve the model. In comparison with the existingMOGA-I approach, MOGA-IC with NSGA-II shows better
performance results in partner selection among CPs in theCACM model.
References
[1] Y. Yamazaki, “Dynamic Collaboration: The Model of NewBusiness that Quickly Responds to Changes in the Marketthrough the Integrated IT/Network Solutions,” NEC J. of Adv.Technol. , vol. 1, no. 1, 2004, pp. 9-16.
[2] S. Nepal and J. Zic, “A Conflict Neighboring NegotiationAlgorithm for Resource Services in Dynamic Collaboration,”
Proc. IEEE ICSC , vol. 2, 2008, pp. 7-11.[3] K. Bubendorfer, “Fine Grained Resource Reservation in Open
Grid Economies,” Proc. IEEE ICEG , vol. 1, 2006, p. 81.[4] K. Deb et al., “A Fast and Elitist Multi-Objective Genetic
Algorithm: NSGA-II,” IEEE Trans. on Evolutionary Comp. , vol.6, 2002, pp. 182-197.[5] E. Zitzler, M. Laumanns, and L. Thiele, “SPEA2: Improving the
Strength Pareto Evolutionary Algorithm,” TIK Report , no. 103,Swiss Fed. Inst. of Tech ., 2001.