DYNAMIC COEFFICIEtNTS OF THE MK-13 ·TORPEDO · 2015. 5. 6. · torpedo (Fig. 1) using the Angular...
14
Department of the Navy Bureau of Ordnance Contract NOrd -9612 DYNAMIC COEFFICIEtNTS OF THE MK-13 ·TORPEDO Taras Kiceniuk Hydrodynamics laboratory CALIFORNIA INSTITUTE OF TECHNOLOGY Pasadena, Co lifornia _ Report No. E-12. 20 , April 1957 Approved by Haskell Shapiro
Transcript of DYNAMIC COEFFICIEtNTS OF THE MK-13 ·TORPEDO · 2015. 5. 6. · torpedo (Fig. 1) using the Angular...

Department of the Navy
Bureau of Ordnance Contract NOrd -9612
DYNAMIC COEFFICIEtNTS OF THE MK-13 ·TORPEDO
Taras Kiceniuk
Hydrodynamics laboratory CALIFORNIA INSTITUTE OF TECHNOLOGY
Pasadena, Co lifornia
_Report No. E-12. 20 ,
April 1957
Approved by Haskell Shapiro

Department of the Navy Bureau of Ordnance Contract NOrd-9612.
DYNAMIC COEFFICIENTS OF THE MK-13 TORPEDO
Taras Kiceniuk
Reproduction in whole or in part is permitted for any purpose of the United States Government
Hydrodynamics Laboratory California Institute of Technology
Pasadena, California
Report No. E-12..2.0 April 1957

Introduction
The forces and moments which act on a submerged body undergoing
unsteady motion can be described in terms of selected dimensionless con-
stant hydrodynamic coefficients if the instantaneous angles of attack are
kept small. To determine the values of these coefficients a model of the
body can be supported from the spindle of a dynamic balance ( 1) in the
flowing stream of a water tunnel working section. This procedure was
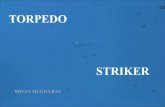
carried out for certain coefficients on a 2 -inch diameter model of the Mk-13
torpedo (Fig. 1) using the Angular Dynamic Balance in conjunction with the
High Speed Water Tunnel at the California Institute of Technology, Hydro-
dynamics Laboratory.
Experimental Method and Analysis of Dat<l;_
The method which was used to obtain the dynamic measurements was
the following: Angular motion of small known amplitude and controllable
frequency was imparted to a driving platform by means of a motor-d:.-iven
car.:1. This platform is coupled to a model support spindle throug:• a cali-
brated torsion spring. By allowing the spindle (and model) to rotate very
freely in a bearing-seal assembly, it is possible to determine the dynar.:1ic
moment reactions acting on the model. This requires knowledge of the
amplitude ratio and phase angle of the ensuing motions, quantities which
were determined through the aid o.f optical levers and a pulsing light
source. The reader is directed to Reference 1 for a complete description
of the equipment and experimental method employed in this study.
The dimensionless dynamic coefficients investigated in this pro-
g ram were N ·' N ' - N ·' N 1 which are described in Reference 2, and r • r v • v '

/ r---- ~
14.3
7
------
z 0
--
-o
--
-
j ----
-----c-
5.7
41
6.3
88
7.0
45
Fig
. l
-T
wo
-in
ch
dia
mete
r m
od
el
of
the M
k-1
3 t
orp
ed
o s
ho
win
g
the t
hre
e a
ltern
ati
ve s
up
po
rt p
oin
ts u
sed
in
th
is i
nv
esti
g
ati
on
. A
ll d
imen
sio
ns
are
in
in
ch
es.
-p
r--
-~
LJ
N

3
which are defined on page 9 of this report. It is to be noted that N 1 - N. 1
r v
is presented in a combined form rather than completely separated, as is
desired. A complete analysis requires that N • 1 be measured in a separate v
program using a balance which imparts a translatory motion to the model
and which measures the moment reaction by means of a supplementary
internal strain gage balance.
Data reduction curves for obtaining the coefficients are presented in
Figures 2. and 3. Figure 2. shows the in-phase component of moment re-
action and Figure 3 shows the quadrature component. The in-phase compo-
nent comprises the spring-like and inertia -like components, whereas the
damping (or velocity dependent) reactions comprise the quadrature compo-
nent. If these reactions are plotted as functions of frequency, certain
hydrodynamic coefficients can be identified with the slopes and intercepts
of the resulting curves. For example, N is found from the y-intercept v
of the in-phase component, while N • is directly related to the slope. From r
the slope of the damping component plot (Fig 3), the linear combination of
coefficients N 1 - N · 1 can be determined. The method of changing sup-r v
port points permits determination in principle at least, of the lateral
forces arising from the angular displacements, velocities and acceler-
ations, but the attainable accuracy is very limited. Instead, use of an
internal strain gage type balance measuring lateral reactions is to be
recommended. Appropriate instrumentation had not been developed at the
time these data were taken, so that the method of changing support point
was used to obtain the original data. This feature has not been exploited
for the reason given above, but the original data have been presented to
permit a more thorough investigation by interested persons.
It should be mentioned that one by-product of this type of

40 1-----+ SOLID SYMBOLS INDICATE --f------1---+----=-"'+--=,.......:qi---____,,..-~::.__--!------l
IMAGE STRUT SHIELD 30
.------,, 0 .06~---r--~---+---+-~~~~~~----=~~----11------=--~-=~~20 ""'-"' I 0
I
~/_,; ~D4r---~,.......:~~~~-~-c~-j---~,.......:~=-~~~~~----1---+----+--~
30 40 50 60 70 100 110
.12
VELOCITY I~ FPS
SOLID SYMBOLS INDICATE ---__. _lso .10
IMAGE STRUT SHIELD ----- ~ =----+ ----- ~ -- ----:-. l----140---- - ---.08
.------, -- - ~ ~I~ I --- ~ v-:- ~30 . - ----~
~
~ !--'"" -v v-: ~ f-" ~
~20--- ~ --~10 ~~_,; .06
L.....:.._j
~ --- ~ ~ I-- ---~ ~ ~ ,_...-
----_-o--!--'"" __.-o---~ ~ ~
.04
o---<J" ..-o--~ ~ ~ ....
~ ~ ::---...-CrTER SUTORT
~~ ~0 FPS ~
.02
0 0 10 20 30 40 50 60 70 80 90 100
JELOCITY I~ FPS .08
~ ;
30 v
110
.06 SOLID SYMBOLS INDICATE -----= ~ _.., 20 _
IMAGE STRUT SHIELD ---== ~ i,....--
~ ~ 10
_.-~ ~ ~ ~---!---" ....-~ ~ ~ ~ ~ ~
~ ~ ~ ~ ,......
~
~ ~ -::::-~ \_ .1 FPS AFT SUTORT -""":;....o'
~
.02
0 0 10 20 30 40 50 60 70 80 90 100
(CYCLES )
2
SQUARE OF FREQUENCY IN SECOND
Fig. 2 -Spring-inertia (in phase) component of moment reaction on a 2 -in. diameter model of the Mk-13 torpedo.
110
4

.12
. 10
.OB
,-----,
CD' "' 06 a-"' · L______j
,----,
CD/ "' 3 ..x;
L____l
r---1
CD/ "' 3 ..x;
L____l
.0 4
.02
0 0
.10
.OB
.06
.04
.02
0 0
.06
.04
.02
0 0
~
~
/ / v
Y~s FOR WARD SU PPORT .,o
I I :p ~ SOLID SYMBOLS INDICATE -.~,«:
IMAGE STRU T SHIELD / 7 / / v ~
/ / v .............. __y:-
/ (""'/ ~ ----I-'"
~ ____.
// y""' ---- ---./ ..............
~~ ~ 'r' ~
y--- 10 -
~ ~ ~ y-o--
~ 0 1- 1-- f-·
2 3 4 5 6 7 8 9 10
~ I~ .,o
~ € ~ .-.!.
CENTER SUPPORT _....../ ~ I I / v--
-------SOLID SY MBOLS INDICATE .......... .,_,o
IMAGE STRUT SHI ELD / ~ v ---~ /. ~ __. ~ 2S-----' --~ ~_..-( ~ ~ ~ ~ 10
~ ~ ~ y--
~ r- 0 ·- -- -- --2 3 4 5 6 7 B 9 10
I AFT SU PPORT
I I SOLID SYMBOLS INDICATE
IMAGE STRUT SHIELD
--~ ~ ;.---·
2 3
lori'S-~ 'J~ --- .--<
v--- ~ --- -~ r---~ ~~------
·- - 0 1-4 5 6 7 B 9 10
(CYCLES)
FREQUENCY, SECOND
II
--
I I
I I
Fig. 3 - Damping {quadrature) component of moment reaction in a 2-in. diameter model of the Mk-13 torpedo.
5

6
investigation is the familiar · static -moment coefficient which is directly
related to N 1 and which can be found from the data reduction curves. v
This serves as a check on the measurements and computations leading to
the final results, since it can be obtained from experiments conducted else-
where with different types of equipment.
Results and Conclusions
The desired coefficients are presented in dimensionless form in
Figures 4, 5, and 6 where they have been plotted against velocity. The
sensitivity of N ' to model support configuration should be noted, as should v
the dependence on velocity. Values obtained by conventional static force
measurements which can be related to N 1 show similar behavior. The v
three curves represent £aired values derived from the processed data
points and corrected for the estimated effect of the spindle shield. This
correction was made by assuming that the image spindle shield contrib-
uted as much influence as did the support spindle shield.
Figure 5 shows the computed value of N ' and, excepting for the bad r
points exhibited by the center -support runs, also shows the independence of
fluid velocity predicted by perfect fluid theory on selected body shapes. Th-e
combined coefficient N '- N.' is the linear combination of two separate r v coefficients which can be analyzed completely by employing the method
outlined above but which has considerable utility in the present combined
form.

> :z -.4
w > ~ > cr w 0
1--.3
:z w :::i' 0 :::i'
2 1- -.2.
~ (j)
u.. 0
1-:z w G :I
i:L u.. w 0 (.)
0
--- --- ----..... .......................
~---- ------ ---.
LEGEND
t::. -- FORWARD SUPPORT 0 -·- CENTER SUPPORT
'----- 0,-- AFT (UPPORT I
0 10 2.0
VELOCITY
4 ---- -
·- - -
NOTE
SOLID SYMBOLS INDICATE IMAGE RUNS .
I I I CURVES REPRESENT FAIRED VALUES
CORRErED FOR !STRUT SHIELD.
I 30 40 50
IN FT./SEC.
Fig. 4 - Coefficient of static moment derivative, N 1, as a function of
tunnel water velocity defined with respect to point of support .
. 07
2 .06
tz w G tE .05 w 0 (.)
<( i=•04 a:: w z
~ .03 1-z w
~· -
LEGEND
t::. -- FORWARD SUPPORT :::i' 0.02. 2
- o --- CENTER SUPPORT
_j <( :::> tr .01
5
0 0
0 ---AFT SUPPORT
10
l
--' --- --- - ·- --c..::::..; ---·
NOTE
SOLID SYMBOLS INDICATE IMAGE RUNS.
2.0 30 40 50
VELOCITY IN FT./SEC.
Fig. 5 - Virtual moment of inertia coefficient, N . 1 , as a function of tunnel water velocity defined with respelt to point of support.
7

•> z
.... z f-z w 0 l:L lL w 0 0
0 w z co ~ 0 0
.4
.3
.2
.I
0 0
- --L..._ __
---- ---
LEGEND
6-- FORWARD SUPPORT 0 -·-CENTER SUPPORT 0--- AFT SUPPORT
10 20
VELOCITY
8
_!.
-f---- )--
NOTE
IMAGE SHIELD HAS NO PERCEPTIBLE EFFECT ON DATA .
30 40 50
IN FT./SEC.
Fig. 6 - Combined coefficient, N 1 - N · 1 , as a function of tunnel water
velocity defined with res:Pect to point of support.

9
List of Symbols and Abbreviations
The motion of the test body is restricted to the plane of yaw. The
symbols used to describe this motion and the associated hydrodynamic re-
actions on the body are in the greater part identical to those recommended
in the Technical and Research Bulletin N .1-5 of the Society of Naval Arc hi-
tects and Marine Engineers titled "Nomenclature for Treating the Motion
of a Submerged Body through a Fluid". These symbols are marked with
an asterisk(*) in the following list:
*
*
*
*
*
* *
*
*
*
A cross -sectional area of model in square feet.
B coefficient of velocity term in equation N = - IB - B~ - K~ which regards model-spindle assembly as single degree of freedom system undergoing forced oscillations.
I
K
K s
1.
N
N r
N. r
= =
coefficient of acceleration term in above equation due to inertia-like hydrodynamic quantities.
coefficient of displacement term in above equation due to spring-like hydrodynamic quantities.
spring constant of support spindle to which model is fastened.
length of body.
hydrodynamic moment acting on body.
Nr1 (l/2pAiu) coefficient of rotary moment derivative.
N. 1 (l/2pA.t3 ) virtual moment of inertia coefficient r (angular acceleration) .
Nv = Nv1 (l/2pA.lU) coefficient of static moment derivative.
N. = v N. I (l/2p AJ. 2 )
v virtual moment of inertia coefficient (tl•ansverse acceleration).
~ = angular displacement about yaw axis.
r =
' r = v
~ .. ~
=
angular velocity component about yaw axis.
angular acceleration component about yaw axis.
linear velocity component at right angles to longitudinal axis and in the horizontal plane.

List of Symbols and Abbreviations {cont'd)
*
*
v
u
linear acceleration component at right angles to longitudinal axis and in the horizontal plane.
velocity of origin of body relative to the fluid.
p mass density of fluid.
ill = 2.v f circular frequency.
References
1. Stallkamp, John A., "Measurement of Dynamic Coefficients of Ellipsoids", California Institute of Technology, Hydrodynamics Laboratory Report No. E-35.4, Sept. 1956.
2.. The Society of Naval Architects and Marine Engineers, "Nomenclature for Treating the Motion of a Submerged Body through a Fluid", Research Bulletin N. 1-5.
10

Copy No.
1-4
5-8
9-10
11-13
14-18
19-21
22
23-24
25-26
27-28
29-30
31
32
33
34
35-36
DISTRIBUTION LIST
Chief, Bureau of Ordnance, Navy Dept., Washington 25, D. C. Attn: Code Re0-3
Chief, Bureau of Ordnance, Navy Dept., Washington 25, D. C. Attn: Code ReU
Chief, Bureau o£ Ordnance, Navy Dept., Washington 25, D. C. Attn: Code Ad3
Chief, Bureau of Aeronautics, Navy Dept., Washington 25, D. C.
Chief, Bureau of Ships, Navy Dept., Washington 25, D. C.
Chief, Office of Naval Research, Navy Dept., Washington 25, D. C Attn: Code 438
Commanding Officer, Cffice of Naval Research Branch Office, 1030 East Green Street, Pasadena 1, California
Commanding Officer and Director, David Taylor Model Basin, Washington 7, D. C.
Commanding Officer, U. S. Naval Underwater Ordnance Station, Newport, Rhode Island
Commander, U. S. Naval Crdnance Laboratory, White Oak, Silver Spring, Maryland
Commander, U. S. Naval Ordnance Test Station, Pasadena, California
Commander, U. S. Naval Ordnance Test Station, China Lake, California
Director, Experimental Towing Tank, Stevens Institute of Technology, via: Bureau of Aeronautics Representative c/o Bendix Aviation Corp., Eclipse-Pioneer Division, Teterboro, New Jersey
Director, Ordnance Research Laboratory, Pennsylvania State University, University Park, Pennsylvania
Alden Hydraulic Laboratory, Worcester Polytechnic Institute, Worcester, lv'iass., via: Inspector of Naval Material, 495 Summer Street, Boston 10, Mass.
Librarian, U. S. Naval Postgraduate School, Monterey, Calif.

Copy No.
37-46
47-49
50-51
52
53
54
55-56
57
58-63
DISTRIBUTION LIST (cont'd)
British Joint Services Mission, Navy Staff, via: Chief, Bureau of Ordnance, Navy Dept., Washington 25, D. C., Attn: Code AdS
Commander, U. S. Naval Proving Ground, Dahlgren, Virginia
National Advisory Committee for Aeronautics, Langley Memorial Aeronautical Laboratory, Langley Field, Virginia
National Advisory Committee for Aeronautics, Lewis Flight Propulsion Lab., Cleveland Airport, Cleveland, Ohio
Director, National Advisory Committee for Aeronautics, 1512 H Street, N. W., Washington 25, D. C.
Director, National Advisory Committee for Aeronautics, Ames Laboratory, Moffett Field, California
Commander, Air Research and Development Command, Post Office Box 1395, Baltimore 3, Maryland
.A:.STIA Reference Center, Technical Information Division, Library of Congress, Washington 25, D. C.
Director, Armed Services Technical Information Agency, Documents Service Center, Knott Building, Dayton 2, Ohio. Attn: DSC -SA