Dynamic behavior of a Beddington–DeAngelis type stage structured predator–prey model
17
Dynamic behavior of a Beddington–DeAngelis type stage structured predator–prey model Subhas Khajanchi Department of Mathematics, Indian Institute of Technology Roorkee, Roorkee 247667, Uttrakhand, India article info Keywords: Stage structure Beddington–DeAngelis Hopf-bifurcation Periodic solutions Global stability abstract This paper deals with a robust stage structured predator–prey model with Beddington– DeAngelis-type functional response. The proposed mathematical model consists of a sys- tem of three nonlinear ordinary differential equations to stimulate the interactions between prey population, juvenile predators and adult predator population. The positivity, boundedness and the conditions for uniform persistence have been derived. The dynamical behavior of the system both analytically and numerically investigated from the point of view of local stability, persistence and global stability. The global stability of the system has been derived by using the theory of competitive systems, stability of periodic orbits and compound matrices for the interior equilibrium point. Depending on the conversion rate of the prey population to juvenile predator, the model exhibits Hopf-bifurcation. The model admit periodic solutions which is produced from the stage structure of the pred- ator populations. Numerical simulations have been accomplished to validate our analytical findings. Ó 2014 Elsevier Inc. All rights reserved. 1. Introduction The dynamical interaction between a predator–prey model with stage structure, is an ascendant themes in applied math- ematics and theoretical ecology [1,2]. The aim of this paper is to investigate the merged effects on the stage-structure on predator and the mutual interference by the predator on the dynamics of the predator–prey system. In the real world, stage structure of juvenile and adult exists in most of the population. The most accepted and classical Lotka–Volterra population model overlook size structures, age structures and space structures. But in most of the cases, populations almost depends on size, age or development stages and these may influence the outcomes of population evolutions. To include a stage structure, size structure in a population model is a typical way to introduce life history. The theories and algorithms has been devel- oped by de Roos et al. [3], Dikemann et al. [4] and Persson et al. [5]. One of the dominant themes in mathematical ecology is the dynamic relationship between predators and their prey. To derive more realistic models, authors have considered noise induced models [6,7], spatial models and even application of evolutionary games in population dynamics [8–11]. But, stage structure population models profound much simpler ways to simulate the diversity than other models and exhibits real world phenomenon. Numerous papers have been published from last few decades on the mathematical modeling of structured populations [4,12–19]. Also, the structured delays are typical ways to constitute the transition from juvenile individuals to adult individuals. The maturation from lower to a higher stage is expressed by time lag [15,18,20–22]. Gourley et al. [15] analyzed a stage structure model with dynamic http://dx.doi.org/10.1016/j.amc.2014.06.109 0096-3003/Ó 2014 Elsevier Inc. All rights reserved. E-mail address: [email protected] Applied Mathematics and Computation 244 (2014) 344–360 Contents lists available at ScienceDirect Applied Mathematics and Computation journal homepage: www.elsevier.com/locate/amc
Transcript of Dynamic behavior of a Beddington–DeAngelis type stage structured predator–prey model

Applied Mathematics and Computation 244 (2014) 344–360
Contents lists available at ScienceDirect
Applied Mathematics and Computation
journal homepage: www.elsevier .com/ locate /amc
Dynamic behavior of a Beddington–DeAngelis type stagestructured predator–prey model
http://dx.doi.org/10.1016/j.amc.2014.06.1090096-3003/� 2014 Elsevier Inc. All rights reserved.
E-mail address: [email protected]
Subhas KhajanchiDepartment of Mathematics, Indian Institute of Technology Roorkee, Roorkee 247667, Uttrakhand, India
a r t i c l e i n f o
Keywords:Stage structureBeddington–DeAngelisHopf-bifurcationPeriodic solutionsGlobal stability
a b s t r a c t
This paper deals with a robust stage structured predator–prey model with Beddington–DeAngelis-type functional response. The proposed mathematical model consists of a sys-tem of three nonlinear ordinary differential equations to stimulate the interactionsbetween prey population, juvenile predators and adult predator population. The positivity,boundedness and the conditions for uniform persistence have been derived. The dynamicalbehavior of the system both analytically and numerically investigated from the point ofview of local stability, persistence and global stability. The global stability of the systemhas been derived by using the theory of competitive systems, stability of periodic orbitsand compound matrices for the interior equilibrium point. Depending on the conversionrate of the prey population to juvenile predator, the model exhibits Hopf-bifurcation.The model admit periodic solutions which is produced from the stage structure of the pred-ator populations. Numerical simulations have been accomplished to validate our analyticalfindings.
� 2014 Elsevier Inc. All rights reserved.
1. Introduction
The dynamical interaction between a predator–prey model with stage structure, is an ascendant themes in applied math-ematics and theoretical ecology [1,2]. The aim of this paper is to investigate the merged effects on the stage-structure onpredator and the mutual interference by the predator on the dynamics of the predator–prey system. In the real world, stagestructure of juvenile and adult exists in most of the population. The most accepted and classical Lotka–Volterra populationmodel overlook size structures, age structures and space structures. But in most of the cases, populations almost depends onsize, age or development stages and these may influence the outcomes of population evolutions. To include a stage structure,size structure in a population model is a typical way to introduce life history. The theories and algorithms has been devel-oped by de Roos et al. [3], Dikemann et al. [4] and Persson et al. [5].
One of the dominant themes in mathematical ecology is the dynamic relationship between predators and their prey. Toderive more realistic models, authors have considered noise induced models [6,7], spatial models and even application ofevolutionary games in population dynamics [8–11]. But, stage structure population models profound much simpler waysto simulate the diversity than other models and exhibits real world phenomenon. Numerous papers have been publishedfrom last few decades on the mathematical modeling of structured populations [4,12–19]. Also, the structured delays aretypical ways to constitute the transition from juvenile individuals to adult individuals. The maturation from lower to ahigher stage is expressed by time lag [15,18,20–22]. Gourley et al. [15] analyzed a stage structure model with dynamic

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 345
resource, where they used a constant maturation time delay which able to generate sustainable oscillatory behavior. Aielloand Freedman [12] established the effect of discrete time delay for a single species model, where the population split intojuvenile and adult individuals. Their model exhibits positive equilibria as the global attractor and they suggested that thestage structure does not originate oscillatory behavior in a single species. Wang et al. [18] proposed and analyzed a preda-tor–prey model with stage structure for predators through ordinary differential equations and their model confesses a peri-odic solution. They incorporated gestation time delay for predator individuals and also find the conditions for permanenceand global stability. Kon et al. [16] generalized the permanence of the stage structure population which have already beenstudied by Cushing [23]. They studied Neubert–Caswell model which is a special type of stage structure population modeland they find the condition for population survival. Bandyopadhyay and Banerjee [21] studied a delayed version of the stage-structure predator–prey model and they showed that their model shows Hopf-bifurcation when the time lag s crosses thecritical value s0. In their model they also calculated the length of gestation delay. Dubey et al. [13] proposed and analyzed astage structure mathematical model for the structured on predators. They derived the global stability for the non-negativeequilibrium point. They also derived the threshold value for the mortality rate of predators, below the threshold value theirmodel is uniformly persistent.
In theoretical ecology, there are several famous functional responses in the predator–prey system which refer to as Hol-ling type-I, type-II, type-III, type-IV, Monod–Haldane type and Hassel–Verley type functional response etc. Some authorsstudied and raised some open questions for structured predator–prey models with different types of functional responses.Beddington [24] and DeAngelis et al. [25] established predator dependent functional response (known as a B–D functionalresponse). Literally, the general Beddington–DeAngelis functional response is the limiting case of prey-dependence andratio-dependence functions. These are some literatures which used the Beddington–DeAngelis functional response[24,26,25,27–29] as the stage structure for predator–prey interaction. Also, the Beddington–DeAngelis-type functionalresponse admits rich but biologically meaningful dynamics [30] which attracts researchers to further study the Bedding-ton–DeAngelis-type models. Influenced by them, here we have taken the Beddington–DeAngelis-type functional responseto study the dynamics of the proposed predator–prey model with stage structure on the predator.
The structure of the paper is as follows: In Section 2, we have described the formulation of the model with the Bedding-ton–DeAngelis type functional response. The conditions for positivity and boundedness have been established in Section 3.Section 4 is devoted to model analysis of the system of equations. It includes uniform persistence, existence of positive equi-libria and their local stability analysis. Also, this section shows the existence of Hopf-bifurcation when the conversionparameter k1 passes the critical value. In Section 5, we derive the conditions for the occurrence of global stability for theunique interior equilibrium point. We perform extensive numerical simulations with suitable choices of parameter valuesin Section 6. The paper ends with a conclusion.
2. The model
Let xðtÞ be the density of the prey population at any time t. We assume that the predator population splits into two stages:juvenile or immature stage, adult or mature stage and also assume that only adult predators attack prey individuals and havereproductive capability but the juvenile predator does not attack the prey individuals as well as have no reproductive capa-bility [14,18]. Let us consider that yðtÞ and zðtÞ denotes juvenile and adult predators at any time t. Assume that the prey pop-ulation can grow logistically in the absence of a predator population with intrinsic growth rate r and environmental carryingcapacity k. The Beddington [24] and DeAngelis et al. [25] type functional response of per capita feeding rate is of the form:
pðx; yÞ ¼ ax1þ bxþ cz
;
where a (units: time�1) and b (units: prey�1) are strictly nonnegative constants, which describes the effects of capture rateand handling time respectively. b determines how fast the per capita feeding rate approaches its saturation value a. cz (c P 0units: 1/predator) measures the magnitude of the mutual interference between individuals of the specialist predators. TheBeddington–DeAngelis functional form, similar to Holling type II functional form, has an additional term cz in the denomi-nator, which is the mutual interference between predators, for which it can be stated as a predator-dependence model byArditi and Ginzburg [31]. The proposed model is as follows:
dxðtÞdt¼ rxðtÞ 1� xðtÞ
k
� �� axðtÞzðtÞ
1þ bxðtÞ þ czðtÞdyðtÞ
dt¼ k1axðtÞzðtÞ
1þ bxðtÞ þ czðtÞ � ayðtÞ � d1yðtÞ
dzðtÞdt¼ ayðtÞ � d2zðtÞ
ð2:1Þ
with initial conditions:
xð0Þ ¼ x0 > 0; yð0Þ ¼ y0 > 0; zð0Þ ¼ z0 > 0 ð2:2Þ

346 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
The constant k1 represents the coefficients in converting the prey individuals into juvenile predator populations and con-stant a stands for the rate of juvenile predator converting to adult predators. The death rate of juvenile and mature individ-uals is proportional to the existing juvenile and mature individuals with coefficients d1 and d2 respectively.
3. The Mathematical Preliminaries of the model
3.1. Positivity
This section is dedicated to the positivity of solutions to the system ð2:1Þ. We start with a theorem which guarantees thatthe system is positive on the interval ½0;þ1½.
Theorem 1. Every solution of (2.1) with respect to the initial conditions (2.2) which exists in ½0;þ1Þ, remain positive 8 t > 0.
Proof. The system of equations (2.1) can be expressed in the vector notation
_XðtÞ ¼ AðXðtÞÞ ð3:1Þwhere,
XðtÞ ¼ colðx; y; zÞ; Xð0Þ ¼ colðxð0Þ; yð0Þ; zð0ÞÞ 2 R3þ
and
AðXðtÞÞ ¼A1ðXðtÞÞA2ðXðtÞÞA3ðXðtÞÞ
0B@
1CA ¼
rxðtÞ 1� xðtÞk
� �� axðtÞzðtÞ
1þbxðtÞþczðtÞ
k1axðtÞzðtÞ1þbxðtÞþczðtÞ � ðaþ d1ÞyðtÞ
ayðtÞ � d2zðtÞ
0BB@
1CCA
where A : R3 ! R3þ and A 2 C1ðR3Þ.
It is obvious that in the Eqs. (2.1), AiðXiÞjXi¼0 P 0, for i ¼ 1 to 3. Due to the classical theorem proposed by Nagumo [32],the solution of (3.1) with initial conditions A0 2 R3
þ, say AðtÞ = Aðt;A0Þ, such that AðtÞ 2 R3þ;8 t >0 i.e. for all finite time. h
3.2. Boundedness
Using the positivity of the state variables we obtain from the first equation of (2.1)
dxdt6 rx 1� x
k
� �:
Then using the standard results for ordinary differential inequalities,
lim supt!1
xðtÞ 6 k
Now to prove the boundedness of juvenile yðtÞ and adult predator zðtÞ, define the function SðtÞ ¼ k1xðtÞ þ yðtÞ þ zðtÞ and thencalculating the time derivatives of the system of ODEs (2.1) along the solution trajectories, we have,
dSdt¼ k1rx 1� x
k
� �� d1y� d2z
Now choose a constant g > 0, such that
dSdtþ gS 6 x k1r 1� x
k
� �þ gk1
h i� ðd1 � gÞy� ðd2 � gÞz
Let us choose, g ¼ minfd1; d2g, then
dSdtþ gS 6 x rk1 1� x
k
� �þ gk1
h i
The supremum of rxk1 1� xk
� �þ k1gx is kk1
ðrþgÞ24r .
Therefore,
dSdtþ gS 6 kk1
ðr þ gÞ2
4r¼ L > 0 ðsayÞ
Now applying the well-known theorem of differential inequality by Birkoff and Rota [33], we have
0 6 SðtÞ 6 Lg
1� e�gt� �
þ Sðxð0Þ; yð0Þ; zð0ÞÞ
by taking t !1, which gives, 0 6 SðtÞ 6 Lg.

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 347
This shows that the system of equations (2.1) is dissipative. The results can be summarized in the following lemma:
Lemma 2. All the solutions of the system of equations (2.1) with initial conditions (2.2) which initiate in R3þ are uniformly
bounded within the region R ¼ fðx; y; zÞ 2 R3þ : 0 6 xðtÞ 6 k;0 6 k1xðtÞ þ yðtÞ þ zðtÞ 6 L
g.
4. Equilibria
The system has three possible feasible equilibria, namely,
(i) the trivial equilibrium point E0ð0; 0;0Þ;(ii) the predator free equilibrium point E1ðk;0;0Þ;(iii) the interior steady state E�ðx�; y�; z�Þ where
x� ¼ kfrcð1þ AbÞ � ag þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffikfrcð1þ AbÞ � ag þ 4Aarkcð1þ AbÞ
p2rcð1þ AbÞ with A ¼ d2ðaþ d1Þ
ak1a� bd2ðaþ d1Þ
y� ¼ rd2ðk� x�Þð1þ bx�Þak� rcðk� x�Þ and z� ¼ rðk� x�Þð1þ bx�Þ
ak� rcðk� x�Þ
which exists if, � �
(I) a < rc þ bd2k11þ d1
a and(II) rk < ak
c þ rx�.
4.1. Local stability analysis
The local stability analysis for the system (2.1) around each of the equilibria is obtained by calculating the variationalmatrix J corresponding to each of the equilibrium point.
The variational matrix of the system (2.1) at any point ðx; y; zÞ is given by,
J ¼
rð1� 2xk Þ �
azð1þczÞð1þbxþczÞ2
0 � axð1þbxÞð1þbxþczÞ2
k1azð1þczÞð1þbxþczÞ2
�ðaþ d1Þ k1axð1þbxÞð1þbxþczÞ2
0 a �d2
0BB@
1CCA
At E0ð0;0;0Þ, the eigenvalues of JE0are given by, k0
1 ¼ rð>Þ0; k02 ¼ �ðaþ d1Þð<Þ0 and k0
3 ¼ �d2ð<Þ0. Therefore, the triv-ial equilibrium point E0 is unstable and it has a saddle point with x-direction as its unstable manifold and y–zplane as its stable manifold. Therefore it can be concluded that, no path initiating in the positive octant canapproach to E0.
The stability conditions for E1ðk;0;0Þ and E�ðx�; y�; z�Þ can be stated in the following lemmas.
Theorem 3. The system (2.1) around the predator free equilibrium E1ðk;0;0Þ is locally asymptotically stable (LAS) ifd2ðaþ d1Þ > aakk1
1þbk. Then the positive solution satisfies
limt!þ1
xðtÞ ¼ k; limt!þ1
yðtÞ ¼ 0; limt!þ1
zðtÞ ¼ 0
Proof. The variational matrix about the rest point E1ðk;0;0Þ can be stated as
JE1¼
�r 0 � ak1þbk
0 �ðaþ d1Þ kak11þbk
0 a �d2
0B@
1CA �
The eigenvalues of the Jacobian matrix JE1around the equilibrium point E1ðk;0;0Þ are given by
k1 ¼ �r; k2;3 ¼�ðaþd1þd2Þ�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðaþd1þd2Þ2�4ðaþd1Þd2�
akk1a1þbk
q2 . The rest point E1 will be LAS if k2;3 < 0 as the other eigenvalue is real and
negative i.e. if d2ðaþ d1Þð1þ bkÞ > akk1a.
Now, we shall analyze the stability around the interior equilibrium point E�ðx�; y�; z�Þ. To find the stability of E�ðx�; y�; z�Þ,compute the Jacobian matrix JE� is,

348 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
JE� ¼
� rx�k þ abx�z�
ð1þbx�þcz�Þ20 � ax�ð1þb�Þ
ð1þbx�þcz�Þ2
k1az�ð1þcz�Þð1þbx�þcz�Þ2
�ðaþ d1Þ k1ax�ð1þbx�Þð1þbx�þcz�Þ2
0 a �d2
0BBB@
1CCCA
The characteristic polynomial is given by, jJE� � kIj ¼ 0
) k3 þ A1k2 þ A2kþ A3 ¼ 0 ð4:1Þ
where,
A1 ¼ aþ d1 þ d2 þrx�
k� abx�z�
ð1þ bx� þ cz�Þ2
A2 ¼ d2ðaþ d1Þ þ ðaþ d1 þ d2Þrx�
k� k1aax�ð1þ bx�Þð1þ bx� þ cz�Þ2
� ðaþ d1 þ d2Þabx�z�
ð1þ bx� þ cz�Þ2
A3 ¼ d2ðaþ d1Þrx�
kþ k1aa2x�z�ð1þ bx�Þð1þ bx� þ cz�Þ3
� d2ðaþ d1Þabx�z�
ð1þ bx� þ cz�Þ2� k1arax�
2 ð1þ bx�Þkð1þ bx� þ cz�Þ2
A1A2 � A3 ¼ d2ðaþ d1Þðaþ d1 þ d2Þ þ ðaþ d1 þ d2Þ aþ d1 þ d2 þrx�
k
� �� aþ d1 þ d2 þ
rx�
k
� �
� k1aax�ð1þ bx�Þð1þ bx� þ cz�Þ2
� abx�z�ðaþ d1 þ d2Þð1þ bx� þ cz�Þ2
" #� rx�
kðaþ d1 þ d2Þ
abx�z�
ð1þ bx� þ cz�Þ2� k1aa2x�z�ð1þ bx�Þð1þ bx� þ cz�Þ3
þ k1a2bax�2z�ð1þ bx�Þ
ð1þ bx� þ cz�Þ4þ ðaþ d1 þ d2Þa2b2x�
2z�
2
ð1þ bx� þ cz�Þ4þ k1aarx�
2 ð1þ bx�Þkð1þ bx� þ cz�Þ2
Using well known Routh–Hurwitz criteria, the roots of the characteristic polynomial (4.1) are negative or have negativereal parts, if A1 > 0;A2 > 0;A3 > 0 and A1A2 � A3 > 0.
After some algebraic manipulation, we obtain,
A1A2 � A3 ¼ ðaþ d1 þ d2Þ d2ðaþ d1Þ �k1aax�ð1þ bx�Þð1þ bx� þ cz�Þ2
þ rx�2
krk� 2abz�
ð1þ bx� þ cz�Þ2
( )" #
þ ðaþ d1 þ d2Þ2x�rk� 2abz�
ð1þ bx� þ cz�Þ2
" #þ a2x�z�
ð1þ bx� þ cz�Þ4b2x�z�ðaþ d1 þ d2Þ � k1að1þ bx�Þð1þ cz�Þh i
Thus the results can be summarized in the following lemma.
Lemma 4. The necessary conditions for the system of ODEs (2.1) to be locally asymptotically stable (LAS) around the interiorequilibrium point E�ðx�; y�; z�Þ is
(S1) a > rk2
1þbx�
z� þ c� �
(S2) r > 2abkz�
ð1þbx�þcz�Þ2and
(S3) k1að1þ bx�Þ < min d2ðaþd1Þð1þbx�þcz�Þ2ax� ; b2x�z�ðaþd1þd2Þ
1þcz�
n o
4.2. Uniform persistence
Our interest of this section, is to establish the conditions for uniform persistence of the system (2.1) with initial conditions(2.2). A system is said to be uniformly persistent if 9 positive constant c; d where 0 6 d 6 c such that,
max x ¼ lim supt!1
ðxðtÞÞ; y ¼ lim supt!1
ðyðtÞÞ; z ¼ lim supt!1
ðzðtÞÞ
6 c
min x ¼ lim inft!1
ðxðtÞÞ; y ¼ lim inft!1
ðyðtÞÞ; z ¼ lim inft!1
ðzðtÞÞn o
P d
for all solutions of the system of ODEs (2.1).
Definition. The system (2.1) is uniformly persistent if there exists a compact region X � IntRþ3 such that every solution XðtÞof (2.1) with Xð0Þ ¼ x0 enters into the bounded region X.
In order to prove the uniform persistence for the system (2.1), it is necessary to prove the boundedness of (2.1) whichhave already proved in the previous section. Now, we are in position to prove the permanent of the system.

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 349
Theorem 5. The system of equations (2.1) is permanent if d2ðaþ d1Þ < aakk11þbk.
Proof. At first, we want to show that the system is weakly persistent. If not then, it follows from the previous Theorem 3 forlocally asymptotically stable (LAS) that there is a positive orbit ðxðtÞ; yðtÞ; zðtÞÞ of the system of ODEs (2.1) such that,
limt!þ1
xðtÞ ¼ k; limt!þ1
yðtÞ ¼ 0; limt!þ1
zðtÞ ¼ 0
Choose, a sufficiently small quantity d > 0 in such a way that
d2ðaþ d1Þ <k1aaðk� dÞ1þ bðk� dÞ
Let us consider,
_uðtÞ ¼ k1aðk� dÞ1þ bðk� dÞ þ cv v � ðaþ d1Þv
_vðtÞ ¼ au� d2v ð4:2Þ
For sufficiently large T > 0 such that if t > T , then we can write the equation as follows:
_yðtÞ ¼ k1aðk� dÞ1þ bðk� dÞ þ cz
z� ðaþ d1Þy
_zðtÞ ¼ ay� d2z
Equilibrium points of (4.2) are given by, Eð0;0Þ and E�ðu�;v�Þ where
u� ¼ d2
av� and
k1aðk� dÞ1þ bðk� dÞ þ cv� v
� ¼ ðaþ d1Þd2
a
� �v�
which implies that v� ¼ 0 or, k1aðk�dÞacd2ðaþd1Þ
� 1þbðk�dÞc
h i¼ v�
The variational matrix of (4.2) is given by,
Vd ¼�ðaþ d1Þ 1þbðk�dÞk1aðk�dÞ
ð1þbðk�dÞþcv�Þ2
a �d2
" #
From the variational matrix Vd it is clear that, the off-diagonal elements are positive (since k > d). By Perron–Frobenius the-orem, there is a nonnegative eigenvector v (say v1;v2) for the maximum root c of the variational matrix Vd. The characteristicpolynomial of Vd is
k2 þ k aþ d1 þ d2ð Þ þ d2ðaþ d1Þ �aak1ðk� dÞð1þ bðk� dÞÞð1þ bðk� dÞ þ cv�Þ2
" #¼ 0
The above polynomial is of degree 2 so it has two roots, say ðc; bÞ, then the product of two roots are
bc ¼ d2ðaþ d1Þ �aak1ðk� dÞð1þ bðk� dÞÞð1þ bðk� dÞ þ cv�Þ2
< 0
Since c was the maximum roots of Vd; c > 0.Let us assume, vðtÞ ¼ v1ðtÞ;v2ðtÞð Þ be the solution of (4.2) through ðmv1;mv2Þ at a time t ¼ T , where length m> 0 satisfies
the conditions, mv1 < yðtÞ;mv2 < zðtÞ.
Also, it is obvious that, uv
� �¼ mectv1
mectv2
� �
uðtÞ and vðtÞ both are strictly increasing function of t, also ðuðtÞ;vðtÞÞ ! þ1, as t ! þ1. Hence, ðyðtÞ; zðtÞÞ ! þ1 fort ! þ1, which oppose the fact that limt!þ1yðtÞ ¼ 0 and limt!þ1zðtÞ ¼ 0. Therefore, no positive orbit for the system (2.1)tends to ðx;0;0Þ i.e. ðk;0;0Þ as t ! þ1. Consequently, this shows that the system (2.1) is weakly persistent. An application oftechnique of paper [34,35] which has been applied here that concludes the permanence of the system (4.2). Hence, theproof. h
4.3. Analysis of Hopf-bifurcation
Our interest of this section is to establish the criteria for Hopf-bifurcation of the system (2.1). Now, we shall find out theconditions for the Hopf-bifurcation around the interior steady state E�ðx�; y�; z�Þ with reference to the parameter k1 (conver-sion of prey population to juvenile predator population) varies over R. The necessary and sufficient conditions for Hopf-bifurcation to happen is there exists k1 ¼ k1cr , such that,

350 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
ðiÞ Aiðk1cr Þ > 0 for i ¼ 1;2;3ðiiÞ uðk1Þ ¼ A1ðk1cr ÞA2ðk1cr Þ � A3ðk1cr Þ ¼ 0
ðiiiÞ Redki
dk1
� �k1¼k1cr
– 0 for i ¼ 1;2;3
By the property of continuity of the root of uðk1Þ, there exists an open interval ðk1cr � d; k1cr þ dÞ (say), for some positive d.Thus for k1 2 ðk1cr � d; k1cr þ dÞ, the characteristic polynomial (4.1) has no roots whose real parts are negative. Therefore,for k1 ¼ k1cr , we have,
k3 þ A1k2 þ A2kþ A1A2 ¼ 0) ðk2 þ A2Þðkþ A1Þ ¼ 0 ð4:3Þ
From above it is clear that, the equation has three roots, say k1 ¼ þiffiffiffiffiffiffiA2p
; k2 ¼ �iffiffiffiffiffiffiA2p
and k3 ¼ �A1, with the pair of complexconjugate roots at k1 ¼ k1cr .
For, k1 2 ðk1cr � d; k1cr þ dÞ, the roots are in general form:
k1ðk1Þ ¼ g1ðk1Þ þ ig2ðk1Þk2ðk1Þ ¼ g1ðk1Þ � ig2ðk1Þk3ðk1Þ ¼ �A1ðk1Þ
Now, we have to verify the transversality condition,
Redkj
dk1
� �k1¼k1cr
– 0 for j ¼ 1;2 ð4:4Þ
On substituting k1ðk1Þ ¼ g1ðk1Þ þ ig2ðk1Þ into the Eq. (4.3) and calculating the derivative, then extracting the real and imag-inary parts we have,
M1ðk1Þg01ðk1Þ �M2ðk1Þg02ðk1Þ þ S1ðk1Þ ¼ 0M2ðk1Þg01ðk1Þ þM1ðk1Þg02ðk1Þ þ S2ðk1Þ ¼ 0
with
M1ðk1Þ ¼ A2ðk1Þ þ 2A1ðk1Þg1ðk1Þ þ 3g21ðk1Þ � 3g2
2ðk1ÞM2ðk1Þ ¼ 6g1ðk1Þg2ðk1Þ þ 2A1ðk1Þg2ðk1ÞS1ðk1Þ ¼ A03ðk1Þ þ A02ðk1Þg1ðk1Þ þ A01ðk1Þg2
1ðk1Þ � A01ðk1Þg22ðk1Þ
S2ðk1Þ ¼ A02ðk1Þg2ðk1Þ þ 2A01ðk1Þg1ðk1Þg2ðk1Þ
Since, M1ðk1ÞS1ðk1Þ þM2ðk1ÞS2ðk1Þ – 0 at k1 ¼ k1cr , we have,
Redkj
dk1
� � k1¼k1cr
¼ M1ðk1ÞS1ðk1Þ þM2ðk1ÞS2ðk1ÞM2
1 þM22
k1¼k1cr
– 0
and k3ðk1cr Þ ¼ A1ðk1cr Þ – 0.Thus the properties of Hopf-bifurcation is verified. On can sketch the outcome in the following proposition.
Proposition 4.1. If the positive interior steady state E� of the system (2.1) exists, then the system experiences Hopf-bifurcationwhere k1 passes the critical value k1cr around the interior equilibrium E�.
5. Global stability analysis
In order to analyze the global stability analysis of the interior steady state E� of the system (2.1), we use the method whichbased on monotone dynamical systems, established by Li and Muldowney [36].
Let x # f ðxÞ 2 R3 be a C1 function (class of functions whose derivatives are continuous) for x in a bounded convex open setin X 2 R3 defined by,
dxdt¼ f ðxÞ ð5:1Þ0 1 x axz0 1
where, x ¼xyz
@ Aandf ðxÞ ¼rxð1� kÞ � 1þbxþcz
k1axz1þbxþcz� ðaþ d1Þy
ay� d2z
@ ASubject to initial conditions, ðx0; y0; z0ÞT ¼ xð0Þ(say).A subset L is called absorbing set in X if xðt; L1Þ � L for any compact subset L1 � X with large t. To analyze the global sta-
bility for the solution x of endemic equilibrium E�, we assume

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 351
(A1) 9 a compact absorbing set L 2 X(A2) x is the only equilibria of the system (5.1) in X.
We have already proved that, the system (2.1) is bounded and uniformly persistent which imply that the system has acompact absorbing set in X [37].
Now we shall establish that the system (2.1) is competitive, which plays an important role to study the global dynamicswhen all the population persists. A diagonal matrix D whose real entries are �1 is known as competitive system andDJEðx; y; zÞD has non-positive off-diagonal entries for ðx; y; zÞ 2 X, where JEðx; y; zÞ is the Jacobian matrix of the system
(2.1). Now, consider the matrix D as follows: D ¼1 0 00 �1 00 0 1
24
35
Then it follows that,
DJEðx; y; zÞD ¼rð1� 2x
k Þ �azð1þczÞð1þbxþczÞ2
0 � axð1þbxÞð1þbxþczÞ2
� ak1zð1þczÞð1þbxþczÞ2
�ðaþ d1Þ � ak1xð1þbxÞð1þbxþczÞ2
0 �a �d2
0B@
1CA
Therefore, it is verified that the system (2.1) is competitive. It is also known that the three dimensional competitive sys-tem satisfies the Poincaré–Bendixson property:
Theorem 6. A three dimensional competitive system defined in a convex open domain, if a non-empty compact x-limit setcontains no equilibrium point, then the system must be a closed orbit.
Here, we will remember elementary definitions which connected to orbital stability for a periodic orbit [35,38]. Suppose,qðtÞ is the periodic solution of the system (5.1) which has a minimal period x > 0 with reference to the orbitC ¼ fqðtÞ : 0 6 t 6 xg. The orbit C is said to be orbitally stable if and only if for each positive � > 0, and there exists a positived in such a way that any solution xðtÞ (say), for which the distance of xð0Þ from the orbit C is not greater than d, whichremains at a distance not greater than � from the orbit C;8t P 0. It is said to be asymptotically orbitally stable, if the distanceof xðtÞ from the orbit C also tending to zero as t tending to infinity. The orbit C is said to be asymptotically orbitally stablewith reference to asymptotic phase if it is asymptotically orbitally stable and there is a positive constant g > 0 in such a waythat, any solution xðtÞ of the system (5.1) for which the distance of xð0Þ from the orbit C is not greater than g, which satisfiesjxðtÞ � qðt � sÞj ! 0 as t tending to infinity for each s depends on xð0Þ. Now, we will derive the criteria appears in [39] for theasymptotically orbitally stable of a periodic orbit of the system (5.1).
Theorem 7. In accordance by Muldowney [39], a sufficient condition of a periodic orbit C ¼ fqðtÞ : 0 6 t 6 xg of (5.1) to beasymptotically orbitally stable with the asymptotic phase for the linear non-autonomous system
dudt¼ @f ½2�
@tðqðtÞÞ
� �uðtÞ
is asymptotically stable, with @f ½2�
@t is the second additive compound matrix of the Jacobian @f@x (see Appendix A).
Recall, for a n� n matrix B and integer 1 6 p 6 n, then the pth order additive matrix of B, denoted as B½p�, defined as,
B½p� ¼ Dþð1þ kBÞðpÞ k¼0
where ð1þ kBÞðpÞ is the pth exterior power of ðI þ kBÞ with Dþ is known as a RHS derivative [39].Now we study the theorem implicitly stated in [36].
Theorem 8. Assume that,
(i) the conditions (A1) and (A2) holds;(ii) equilibrium solution x is LAS;
(iii) the model system (5.1) satisfies Poincaré–Bendixson criterion and(iv) periodic solution of (5.1) in X is asymptotically orbitally stable.
Then x is only the equilibria in X is globally asymptotically stable.Now, we will verify that the system is globally asymptotically stable by obtaining simple sufficient conditions.The Jacobian matrix J of the system (2.1) is given by,
J ¼
r 1� 2xk
� �� azð1þczÞð1þbxþczÞ2
0 � axð1þbxÞð1þbxþczÞ2
� ak1zð1þczÞð1þbxþczÞ2
�ðaþ d1Þ ak1xð1þbxÞð1þbxþczÞ2
0 a �d2
0BB@
1CCA

352 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
and the corresponding associated second additive compound matrix J½2� is
J½2� ¼
r 1� 2xk
� �� azð1þczÞð1þbxþczÞ2
� ðaþ d1Þ ak1xð1þbxÞð1þbxþczÞ2
axð1þbxÞð1þbxþczÞ2
a r 1� 2xk
� �� azð1þczÞð1þbxþczÞ2
� d2 0
0 ak1zð1þczÞð1þbxþczÞ2
�ðaþ d1 þ d2Þ
0BBB@
1CCCA
The second additive compound matrix J½2� along the periodic solution ðu1ðtÞ;u2ðtÞ;u3ðtÞÞ of (2.1) is,
_u1ðtÞ ¼ r 1� 2xk
� �� azð1þ czÞð1þ bxþ czÞ2
� ðaþ d1Þ" #
u1ðtÞ þak1xð1þ bxÞð1þ bxþ czÞ2
u2ðtÞ þaxð1þ bxÞð1þ bxþ czÞ2
u3ðtÞ ð5:2Þ
_u2ðtÞ ¼ au1ðtÞ þ r 1� 2xk
� �� azð1þ czÞð1þ bxþ czÞ2
� d2
" #u2ðtÞ ð5:3Þ
_u3ðtÞ ¼ak1zð1þ czÞð1þ bxþ czÞ2
u2ðtÞ � ðaþ d1 þ d2Þu3ðtÞ ð5:4Þ
In order to prove the asymptotic stability of the system (5.2)–(5.4), we define the following Lyapunov function:
Vðu1ðtÞ;u2ðtÞ;u3ðtÞ; xðtÞ; yðtÞ; zðtÞÞ ¼ u1ðtÞ;yðtÞzðtÞ u2ðtÞ;
yðtÞk1zðtÞu3ðtÞ
� ���������
where k � k is the norm on L2 in R3 is stated as,
ku1;u2;u3k ¼ supfju1j; ju2 þ u3jg
Since the system (2.1) is uniform persistent, then the periodic solution fxðtÞ; yðtÞ; zðtÞg is at a positive distance from theboundary X. Therefore, there is a positive constant c > 0 such that
yðtÞP c; zðtÞP c; c ¼ minfy; zg
for all sufficiently large t. Hence, the Lyapunov function along the orbit qðtÞ,
Vðu1;u2;u3; x; y; zÞ ¼ sup ju1j;yzju2j þ
yk1zju3j
P c sup ju1j; ju2j þ
1k1ju3j
P c u1;u2;
u3
k1
� ���������
Therefore, the Lyapunov function along the orbit qðtÞ is given by,
VðtÞ ¼ sup ju1ðtÞj;yðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �
Let us estimate the RHS derivative of the Lyapunov function V along the solution ðu1;u2;u3 2 R3Þ of the system (5.2)–(5.4),
Dþju1ðtÞj 6 � �r 1� 2xk
� �þ azð1þ czÞð1þ bxþ czÞ2
þ ðaþ d1Þ" #
ju1ðtÞj þak1xð1þ bxÞð1þ bxþ czÞ2
ju2ðtÞj þaxð1þ bxÞð1þ bxþ czÞ2
ju3ðtÞj
¼ � �r þ 2rxkþ azð1þ czÞð1þ bxþ czÞ2
þ ðaþ d1Þ" #
ju1ðtÞj þak1xð1þ bxÞz
yð1þ bxþ czÞ2yðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �� �ð5:5Þ
Dþju2ðtÞj 6 � �r þ 2rxkþ azð1þ czÞð1þ bxþ czÞ2
þ d2
" #ju2ðtÞj þ aju1ðtÞj ð5:6Þ
and
Dþju3ðtÞj 6 �ðaþ d1 þ d2Þju3ðtÞj þk1að1þ czÞð1þ bxþ czÞ2
ju2ðtÞj ð5:7Þ
Now, from (5.6) and (5.7), we can write,
Dþ ju2ðtÞj þju3ðtÞj
k1
� �6 aju1ðtÞj � �r þ 2rx
kþ d2
� �ju2ðtÞj þ ðaþ d1 þ d2Þ
ju3ðtÞjk1
� �
6 aju1ðtÞj �! ju2ðtÞj þju3ðtÞj
k1
� �ð5:8Þ
with ! ¼ min �r þ 2rxk þ d2;aþ d1 þ d2
� �.

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 353
Now, using the inequality (5.8)
DþyðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �� �¼
_yy�
_zz
� �yðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �þ yðtÞ
zðtÞDþ ju2ðtÞj þju3ðtÞj
k1
� �
6
_yy�
_zz
� �yðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �þ yðtÞ
zðtÞ aju1ðtÞj �! ju2ðtÞj þju3ðtÞj
k1
� �� �
¼ ayðtÞzðtÞ ju1ðtÞj þ
yðtÞzðtÞ
_yy�
_zz�!
� �ju2ðtÞj þ
ju3ðtÞjk1
� �ð5:9Þ
If ju1ðtÞjP yðtÞzðtÞ ju2ðtÞj þ ju3ðtÞj
k1
� �, then using the inequalities (5.5) and (5.9), we get,
DþVðtÞ ¼ Dþju1ðtÞj 6 � �r þ 2rxkþ azð1þ czÞð1þ bxþ czÞ2
þ ðaþ d1Þ" #
ju1ðtÞj þak1xð1þ bxÞz
yð1þ bxþ czÞ2ju1ðtÞj
¼ � �r þ 2rxkþ azð1þ czÞð1þ bxþ czÞ2
þ ðaþ d1Þ þak1xð1þ bxÞz
yð1þ bxþ czÞ2
" #ju1ðtÞj ¼ g1ðtÞVðtÞ ð5:10Þ
where,
g1ðtÞ ¼ � �r þ 2rxkþ azð1þ czÞð1þ bxþ czÞ2
þ ðaþ d1Þ" #
þ ak1xð1þ bxÞzyð1þ bxþ czÞ2
ð5:11Þ
If ju1ðtÞj 6 yðtÞzðtÞ ju2ðtÞj þ ju3ðtÞj
k1
� �, then using (5.5) and (5.9), we get,
DþVðtÞ ¼ DþyðtÞzðtÞ ju2ðtÞj þ
ju3ðtÞjk1
� �� �6
yðtÞzðtÞ a
yðtÞzðtÞ þ
_yy�
_zz�!
� �� �ju2ðtÞj þ
ju3ðtÞjk1
� �¼ g2ðtÞVðtÞ ð5:12Þ
where,
g2ðtÞ ¼ ayðtÞzðtÞ þ
_yy�
_zz�!
� �ð5:13Þ
From the expression (5.10) and (5.12) we have,
DþVðtÞ 6 supfg1ðtÞ; g2ðtÞgVðtÞ ð5:14Þ
From the last two equations of the system of ODEs (2.1),
_yy¼ k1xz
yð1þ bxþ czÞ � ðaþ d1Þ and_zz¼ a
yz� d2
Now, using the above relation, (5.11) can be written as,
g1ðtÞ ¼ r � 2rxk� azð1þ czÞð1þ bxþ czÞ2
� ðaþ d1Þ þak1xð1þ bxÞz
yð1þ bxþ czÞ2
¼_yyþ r � 2rx
k� azð1þ czÞð1þ bxþ czÞ2
� ak1xð1þ bxÞzyð1þ bxþ czÞ þ
ak1xð1þ bxÞzyð1þ bxþ czÞ2
¼_yyþ r � 2rx
k� azð1þ czÞð1þ bxþ czÞ2
� ak1xðczÞzyð1þ bxþ czÞ2
¼_yyþ r � 2rx
k� ayzð1þ czÞ þ ak1czx2
yð1þ bxþ czÞ2ð5:15Þ
Now, we can consider the following cases:
CASE-I: In the first case, ! ¼ min �r þ 2rxk þ d2;aþ d1 þ d2
� �¼ �r þ 2rx
k þ d2 then it can be used without any loss of gener-ality that, ðaþ d1 þ d2Þ > �r þ 2rx
k þ d2 which imply that, x > k2 with aþ d1 > r
g2ðtÞ ¼ ayðtÞzðtÞ þ
_yy�
_zz�! ¼ a
yðtÞzðtÞ þ
_yy� a
yðtÞzðtÞ þ d2 � �r þ 2rx
kþ d2
� �6
_yyþ r � 2rx
kð5:16Þ
Using (5.15), (5.16) in (5.14), it follows,
supfg1ðtÞ; g2ðtÞg ¼ sup_yyþ r � 2rx
k� ayzð1þ czÞ þ ak1czx2
yð1þ bxþ czÞ2;
_yyþ r � 2rx
k
( )¼
_yyþ r � 2rx
k6
_yy� S: ð5:17Þ
where S > 0, in such a way that r � 2rxk < �S.
CASE-II: For the second case, ! ¼ minf�r þ 2rxk þ d2;aþ d1 þ d2g ¼ aþ d1 þ d2, then without any loss of generality, we can
claim that ðaþ d1 þ d2Þ < �r þ 2rxk þ d2 which imply that, x > kðrþaþd1Þ
2r with aþ d1 < r

0 50 100 150 2000
0.5
1
1.5
2 (d)
0 50 100 150 2000
0.5
1
1.5
2
Time
Popu
latio
n(x,
y,z)
(c)00.5
11.5
2
00.5
11.50
0.5
1
1.5
2
xy
z
0 50 100 150 2000
0.5
1
1.5
2(b)
(a)
xyz
(1.6,1.3,1.3)(1.6,1.5,1.5)
(1.6,1.0,1.0)(1.6,0.8,0.8)
(1.6,0.,0.5)
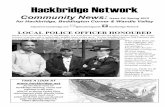
Fig. 1. (a) All the trajectories of the system (2.1) approach asymptotically to E1ð1:6;0;0Þwith k1 ¼ 0:35. (b) Time series for the trajectory given in (a) initiateat (1.6,0.5,0.5). (c) Time series for the trajectory given in (a) initiate at (1.6,1.0,1.0). (d) Time series for the trajectory given in (a) initiate at (1.6,1.5,1.5).
0 200 400 600 800 10000.2
0.3
0.4
0.5
0.6
0.7
Prey
Pop
ulat
ion
0 200 400 600 800 10000.4
0.5
0.6
0.7
0.8
0.9
1
Juve
nile
Pre
dato
r
0 200 400 600 800 10001
1.1
1.2
1.3
1.4
Time
Adu
lt Pr
edat
or
0.20.4
0.60.8
0.40.6
0.811
1.1
1.2
1.3
1.4
Prey(x)Juvenile Predator
Adu
lt Pr
edat
or
Fig. 2. The solution of the system (2.1) around the interior equilibrium point E� is locally asymptotically stable with k1 = 0.912.
354 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
g2ðtÞ ¼ ayðtÞzðtÞ þ
_yy�
_zz�! ¼ a
yðtÞzðtÞ þ
_yy� a
yðtÞzðtÞ þ d2 � ðaþ d1 þ d2Þ 6
_yy� ðaþ d1Þ ð5:18Þ
Comparing the relationship between g1ðtÞ and g2ðtÞ and then substitute into (5.14), it follows,
supfg1ðtÞ; g2ðtÞg ¼ sup_yyþ r � 2rx
k� ayzð1þ czÞ þ ak1czx2
yð1þ bxþ czÞ2;
_yy� ðaþ d1Þ
( )¼
_yy� ðaþ d1Þ ð5:19Þ

0 200 400 600 800 1000
0.35
0.4
0.45
Prey
Pop
ulat
ion
(a)
0 200 400 600 800 1000
0.7
0.8
0.9
1
Juve
nile
Pre
dato
r
(b)
0 200 400 600 800 10001.2
1.22
1.24
1.26
1.28
Time
Adu
lt Pr
edat
or
(c)
0.32 0.340.36 0.38
0.40.7
0.80.9
1.2
1.25
1.3
Prey(x)Juvenile Predator
(d)
Adu
lt Pr
edat
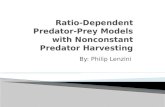
orFig. 3. The solution of the system (2.1) shows onset of transient oscillations around the interior equilibrium point E� with k1 = 0.958, and the phase planeshows the closed periodic orbit with same value of k1.
0 200 400 600 800 10000.1
0.2
0.3
0.4
0.5
0.6
Prey
Pop
ulat
ion
(a)
0 200 400 600 800 10000.2
0.4
0.6
0.8
1
1.2
Juve
nile
Pre
dato
r
(b)
0 200 400 600 800 10001
1.1
1.2
1.3
1.4
Time
Adu
lt Pr
edat
or
(c)
0 0.2 0.4 0.6 0.8
00.5
11.51
1.2
1.4
Prey(x)Juvenile Predator
(d)
Adu
lt Pr
edat
or
Fig. 4. The solution of the system (2.1) shows stable and periodic oscillations around the interior equilibrium point E� with k1 = 1.089, and the phase planeshows the stable limit cycle with the same value of k1.
S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 355
Let us consider, s ¼ minfS; ðaþ d1Þg. Also from (5.17) and (5.19), we have,
supfg1ðtÞ; g2ðtÞg 6_yy� s ð5:20Þ
Now, from (5.14) and (5.19), it is clear that
DþVðtÞ 6 supfg1ðtÞ; g2ðtÞg 6_yy� s
� �
Let us assume that the period of the periodic solution ðxðtÞ; yðtÞ; zðtÞÞ is denoted as s. Then, it can be expressed by,
Z s0supfg1ðtÞ; g2ðtÞgdt 6
Z s
0
_yy� s
� �dt ¼ ln yðtÞjs0 � ss ¼ �ss < 0

00.2
0.40.6
0.81
0
0.5
1
1.50.8
1
1.2
1.4
1.6
1.8
2
Prey Population(x)Juvenile Predator(y)
Adu
lt Pr
edat
or(z
)
(0.5,0.6,1.0)
(0.5,1.0,1.0)
(1.0,1.2,1.2)
(0.5,0.6,1.9)
Fig. 5. E�ð0:400922;0:77916;1:40249Þ is globally asymptotically stable with k1 ¼ 0:9 and r = 1.7.
0.32 0.34 0.36 0.38 0.4
0.650.70.750.80.850.90.95
x
y
0.32 0.34 0.36 0.38 0.41.2
1.22
1.24
1.26
1.28
x
z
0.7 0.8 0.9 11.2
1.22
1.24
1.26
1.28
y
z
0 0.2 0.4 0.6 0.80.2
0.4
0.6
0.8
1
1.2
x
y
0 0.2 0.4 0.6 0.81
1.1
1.2
1.3
1.4
x
z
0.2 0.4 0.6 0.8 11
1.1
1.2
1.3
1.4
y
z
Fig. 6. The top panel shows the phase plane diagram for k1 = 0.958 and bottom panel diagram shows the phase portrait diagram for k1 = 1.089.
356 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
Therefore the system (5.2)–(5.4) is asymptotically stable. Then, the periodic solution of the system ðxðtÞ; yðtÞ; zðtÞÞ is asymp-totically orbitally stable with asymptotic phase. Summarize the above discussions in the following theorem,
Theorem 9. The interior steady state E� is globally asymptotically stable if
ðiÞ aþ d1 > r; and x >k2
ðiiÞ aþ d1 < r; and x >kðaþ d1 þ rÞ
2r
6. Numerical simulation
In the foregoing sections, we have established analytical results and used them for qualitative analysis of the system ofequations (2.1). In this section, we shall corroborate all the analytical findings with the help of numerical simulations accom-plished with MATLAB and XPPAut.

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 357
To check the feasibility of equilibrium point and stability conditions, we have chosen the following set of parameter val-ues in the model system (2.1). The rate of conversion of prey individuals to juvenile predator ðk1Þ plays an indispensable rolein the dynamics. Keeping this in mind, we have analyzed the dynamics of the system for a wide variation ink1; 0:01 < k1 < 1:5, the rest of the parameters are as follows:
Fig. 7.k1ð¼ k1
r ¼ 1:5; k ¼ 1:6; a ¼ 1:4; b ¼ 1:0; c ¼ 0:1; a ¼ 0:09; d1 ¼ 0:5; d2 ¼ 0:05
The numerical result shows that the predator free equilibrium E1ð1:6;0;0Þ is locally asymptotically stable for k1 ¼ 0:35and rest of the parameters are same. (see Fig. 1).
For the above system of parameter values, it can be checked that the interior steady state E�ðx�; y�; z�Þ has a positive equi-librium point, (for k1 ¼ 0:9), x� ¼ 0:394665; y� ¼ 0:680296 and z� ¼ 1:22453. The characteristic polynomial of (2.1) is
k3 þ 0:716037k2 þ 0:0510445kþ 0:0228536 ¼ 0
The eigenvalues are k1 ¼ �0:690059; k2 ¼ �0:0129889þ 0:18152i; k3 ¼ �0:0129889� 0:18152i. as the eigenvalues are neg-ative or have negative real parts. Hence, the interior equilibrium E� is locally asymptotically stable. Now for k1 ¼ 1:2, theinterior steady state E�ðx�; y�; z�Þ has positive equilibrium points are x� ¼ 0:272495; y� ¼ 0:689755 and z� ¼ 1:24156. Thecharacteristic equation for the model system (2.1) is
k3 þ 0:652649k2 þ 0:0107175kþ 0:026957 ¼ 0
The eigenvalues of the Jacobian matrix corresponding to the interior steady state E� are k1 ¼ �0:693276; k2 ¼0:0203137þ 0:19614i; k3 ¼ 0:0203137� 0:19614i. From the eigenvalues of the model system (2.1) is obvious that the inte-rior steady point E� is unstable and Hopf-bifurcation take place.
The figure shows the bifurcation diagram of prey population ðxÞ, juvenile predator ðyÞ and adult predator ðzÞ with respect to the parameter
cr ¼ 1:052928Þ in each case.

358 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
The conversion parameter k1 shows the Hopf-bifurcation in the Fig. 7. From the bifurcation diagram it is clear that for thelower value of k1, the system is stable, (shown by thick line) but when the conversion parameter k1 is increased the systemlosses its stability and become unstable and the periodic solution arises through Hopf-bifurcation. The left side of the thresh-old value of k1ð¼ k1cr ¼ 1:052928Þ, the positive interior equilibrium point is globally asymptotically stable.
Analytically, we have already seen that the interior equilibrium point E� exists if a < rc þ bd2k1ð1þ d1
a Þ and rk < akc þ rx�. For
the earlier set of parameter values, we obtained the critical value of conversion rate ðk1Þ is 0.921; the interior equilibriumexists and the system becomes stable asymptotically (Fig. 2).
Now, we want to study the dynamics of prey, juvenile predator and adult predator populations in the vicinity of the bifur-cation parameter k1. Let us choose the distinct values for the parameter k1 e.g. k1=0.958 ð< k1cr Þ and k1 = 1.089ð> k1cr Þ. Withthe assist of these two values of ðk1Þ and the set of parameters chosen as before we sketch the solution curves for prey pop-ulation, juvenile predator and adult predator individuals in (Figs. 3, 4 and 6) respectively. It can be shown that when thevalue of k1 very close to k1cr , the prey population became stable and when k1 passes the value of k1cr , the prey populationðxÞ oscillate periodically (Figs. 3(a) and 4(a)). The same kind of phenomena happen for juvenile predator ðyÞ (Figs. 3(b)and 4(b)), for the adult predator population ðzÞ (Figs. 3(c) and 4(c) and a stable limit cycle (Fig. 3(d)) for a stable phase por-trait (Fig. 4(d)).
For the global stability (Fig. 5) of the system (2.1), we took k1 = 0.9, r = 1.7 and the rest of parameter sets taken as earlier,with different type of initial values. The set of parameters satisfies the conditions for global stability which we have obtainedanalytically. The phase plane diagram generated in two dimensional system have been shown in Fig. 6. The first panel ofFig. 6, shows the stable limit cycle of prey ðxÞ and juvenile predator ðyÞ, prey ðxÞ and adult predator ðzÞ, juvenile predatorðyÞ and adult predator ðzÞ respectively at k1 ¼ 0:958. The second panel of Fig. 6, shows the stable oscillation persists andbecame a stable limit cycle at k1=1.089. Fig. 7 shows the bifurcation diagram of the system (2.1), with respect to the param-eter k1. From the bifurcation diagram, it is obvious that for the lower values of k1 i.e. (k1 <1.052928) the system is stable, butabove the threshold value of k1 i.e. ðk1 >1.052928) the system induces instability and the periodic solution arises throughHopf-bifurcation. However, if k1 is below the threshold value, the positive interior steady state remains globally asymptot-ically stable.
7. Conclusions
In this paper, we have proposed and analyzed, both analytically and numerically a predator–prey model with a stagestructure for the predator, by introducing Beddington–DeAngelis-type functional response. The dynamics of the model isbounded by a compact set in the positive orthant, so no individuals can grow unboundedly, which is biologically meaningfulin the view of limitations of nutrients, space, competitions between predators etc. The model system (2.1) confesses threeequilibrium points, their existence is obtained analytically and local stability is analyzed. Additionally, via numerical simu-lations, it manifests also sustained oscillations.
The structured predator–prey model with Beddington–DeAngelis-type functional response is not only an stimulatingcontemporary research experience for nowadays, it also provides rich but biologically meaningful dynamics to understandthe real ecological episode. By studying the nature of the roots of concerned characteristic polynomials, local stability andglobal stability of the system (2.1) is discussed. The dynamics of the system (2.1) in the vicinity of co-existence steady stateE� is too important as the entire populations survive for this equilibria. The dynamics of the surviving individuals shows sta-bility for the small range of conversion rate ðk1Þ of prey populations to juvenile predators. Increasing the value of conversionrate ðk1Þ destabilizes the model system (2.1) through Hopf-bifurcation, and the population exhibits oscillatory behavior. Inthe real phenomena, it can be viewed that the conversion rate ðk1Þ increases for some of its critical value then the number ofprey population decreases gradually and predator populations at first increases due to sufficient prey populations (for food)but then decreases due to inaccessibility of prey individuals. Such kind of oscillatory behavior has been observed in a pred-ator–prey system which is known as ’bloom’.
The analysis of global stability is very much useful than the use of only local stability analysis in the biological point ofview. In the case of global stability all the individuals co-exist and trajectories are initiated to the equilibrium point. To studythe global stability of interior steady state E�, we have used the method of Li and Muldowney, which assured that the globalstability of the interior equilibrium point by simple sufficient conditions. The global stability of E� also have been provednumerically by suitable choice of parameter values.
The present study is based on hypothetical data, no experimental data is accessible in our hand, but the analysis may behelpful to the researchers/readers who are doing the work in the related field on the basis of experimental data. The stabilityswitches may occur, and the model system (2.1) exhibits more complex dynamics. We leave them for the future work. Alsoin our work, we assumed the environmental effect, the effect of temperature and all other situations are as homogeneous butin reality it is inhomogeneous. We may consider a heterogeneous system for our future work.
Acknowledgements
I convey my deepest gratitude to the anonymous reviewers for their observations and valuable comments. I am alsothankful to Dr. Sandip Banerjee, Department of Mathematics, IIT Roorkee for valuable suggestions, which helped in the better

S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360 359
exposition of the manuscript. This study was supported by the initiation grant (Grant No.- MHR02–23-200-304) from theMinistry of Human and Research Development (MHRD), India.
Appendix A
The second additive compound matrix:Let A be a n� n matrix with real entries and identified with the linear operator on the standard basis of Rn. Let ‘^’ denotes
the exterior product in Rn with respect to the canonical basis in the exterior product space ^2Rn. The linear operator A½2� on^2Rn ; for v1;v2 2 Rn, defined as
A½2�ðv1 ^ v2Þ ¼ Aðv1Þ ^ v2 þ v1 ^ Aðv2Þ
and the definition overall of ^2Rn through the extension of linearity. The matrix representation of A½2� with respect to the
canonical basis in ^2Rn is called the second additive compound matrix of A. This is a n2
� �� n
2
� �matrix which satisfies
the property ðAþ BÞ½2� ¼ A½2� þ B½2�.Let us consider A ¼ ðaijÞ. For any integer i ¼ a;2; . . .
n2
� �and ðiÞ ¼ ði1; i2; . . . ikÞ be the ith member in lexicographic ordering
of integer pairs such that 1 6 i1 < i2 < � � � < ik 6 n. Then the entry in the ith row and jth column of C ¼ A½k� is
Cij ¼ai1 i1 þ . . .þ aikiiþk
; for ðiÞ ¼ ðjÞ;ð�1Þrþsaisjr ; if exactly one entry is in ðiÞ does not occur in ðjÞ and jr does not occur in ðiÞ;0; if ðiÞ differs from ðjÞ in two or more entries:
8><>:
At the extreme cases when k = 1 and k = n, we have A½1� ¼ A and A½n� ¼ trðAÞ. For n = 2, a11 þ a22 ¼ trðAÞ
For n = 3, A½2� ¼a11 þ a22 a23 �a13
a32 a11 þ a33 a12
�a31 a21 a33 þ a22
0@
1A
For detailed discussion about second additive compound matrices, its applications and their properties, the reader can see[39,40].
Appendix B. Supplementary data
Supplementary data associated with this article can be found, in the online version, at http://dx.doi.org/10.1016/j.amc.2014.06.109.
References
[1] A.A. Berryman, The origins and evolution of predator–prey theory, Ecology 73 (5) (1992) 1530–1535.[2] C.S. Holling, Some characteristics of simple 240 types of predation and parasitism, Can. Entomologist 91 (1959) 385–398.[3] A.M. de Roosa, L. Persson, Competition in size-structured populations: mechanisms inducing cohort formation and population cycles, Theor. Popul.
Biol. 63 (1) (2003) 1–16.[4] O. Diekmanna, M. Gyllenberg, J.A.J. Metz, Steady-state analysis of structured population models, Theor. Popul. Biol. 63 (4) (2003) 309–338.[5] L. Persson, A.M.D. Roos, Adaptive habitat use in size-structured populations: linking individual behavior to population process, Rocky Mt. J. Math. 84
(5) (2003) 1129–1139. <http://www.esajournals.org/doi/abs/10.1890/0012-9658> .[6] M. Perc, A. Szolnoki, Noise-guided evolution within cyclical interactions, New J. Phys. 9 (2007) 267.[7] G.-Q. Sun, Z. Jin, L. Li, Q.-X. Liu, The role of noise in a predator–prey model with Allee effect, J. Biol. Phys. 35 (2) (2009) 185–196.[8] J. Hofbauer, K. Sigmund, Evolutionary Games and Population Dynamics, Cambridge University Press, Cambridge, 1998.[9] M. Perc, Coherence resonance in a spatial prisoner’s dilemma game, New J. Phys. 8 (2006) 22.
[10] J. Pomerantz, W.L. Miranker, The prisoner’s dilemma and predator–prey coevolution, Neural Parallel Sci. Comput. 10 (1) (2002) 113–140.[11] M. Perc, M. Marhl, Evolutionary and dynamical coherence resonances in the pair approximated prisoner’s dilemma game, New J. Phys. 8 (2006) 142.[12] W.G. Aiello, H.I. Freedman, J. Wu, Analysis of a model representing stage-structured population growth with state-dependent time delay, SIAM J. Appl.
Math. 52 (3) (1992) 855–869.[13] B. Dubey, R. Upadhyay, Persistence and extinction of one-prey and two-predators system, Nonlinear Anal. Model. Control 9 (4) (2004) 307–329.[14] P. Georgescu, Y.-H. Hsieh, Global dynamics of a predator–prey model with stage structure for the predator, SIAM J. Appl. Math. 67 (5) (2007) 1379–
1395.[15] S.A. Gourley, Y. Kuang, A stage structured predator–prey model and its dependence on maturation delay and death rate, J. Math. Biol. 49 (2) (2004)
188–200.[16] R. Kon, Y. Saito, Y. Takeuchi, Permanence of single-species stage-structured models, J. Math. Biol. 48 (5) (2004) 515–528.[17] S. Liu, L. Chen, R. Agarwal, Recent progress on stage-structured population dynamics, Math. Comput. Model. 36 (2002) 1319–1360.[18] W. Wang, L. Chen, A predator–prey system with stage-structure for predator, Comput. Math. Appl. 33 (8) (1997) 83–91.[19] Y.N. Xiao, L.S. Chen, Global stability of a predator–prey system with stage structure for the predator, Acta Math. Sin. 20 (1) (2004) 63–70.[20] W. Aiello, H.I. Freedman, A time delay model of single-species growth with stage structure, Math. Biosci. 101 (2) (1990) 139–153.[21] M. Bandyopadhyay, S. Banerjee, A stage-structured prey–predator model with discrete time delay, Appl. Math. Comput. 182 (2) (2006) 1385–1398.[22] J. Chattopadhyay, R.R. Sarkar, A.E. Abdllaoui, A delay differential equation model on harmful algal blooms in the presence of toxic substances, IMA J.
Math. Appl. Med. Biol. 19 (2002) 137–161.[23] J.M. Cushing, An introduction to structured population dynamics, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, Philadelphia,
1998. doi:.org/10.1137/1.9781611970005.[24] J.R. Beddington, Mutual interference between parasites or predators and its effect on searching efficiency, J. Anim. Ecol. 44 (1) (1975) 331–340.

360 S. Khajanchi / Applied Mathematics and Computation 244 (2014) 344–360
[25] D.L. DeAngelis, R.A. Goldstein, R.V. O’Neill, A model for tropic interaction, Ecology 56 (4) (1975) 881–892. <www.esajournals.org/doi/abs/10.2307/1936298> .
[26] L. Cai, J. Yu, G. Zhu, A stage-structured predator–prey model with Beddington–Deangelis functional response, J. Appl. Math. Comput. 26 (2008) 85–103.[27] K.A. Hasan, M.F. Hama, Complex dynamics behaviors of a discrete prey–predator model with Beddington–Deangelis functional response, Int. J.
Contemp. Math. Sci. 7 (45) (2012) 2179–2195.[28] C.-Y. Huang, M. Zhao, L.-C. Zhao, Permanence of periodic predator–prey system with two predators and stage structure for prey, Nonlinear Anal. Real
World Appl. 11 (1) (2010) 503–514.[29] S. Liu, E. Beretta, A stage-structured predator–prey model of Beddington–Deangelis type, SIAM J. Appl. Math. 66 (4) (2006) 1101–1129.[30] R.S. Cantrell, C. Cosner, On the dynamics of predator–prey models with the Beddington–Deangelis functional response, J. Math. Anal. Appl. 257 (1)
(2001) 206–222.[31] R. Arditi, L.R. Ginzburg, Coupling in predator–prey dynamics: ratio-dependence, J. Theor. Biol. 139 (3) (1989) 311–326.[32] N. Nagumo, Über die lage der integralkurven gewöhnlicher differentialgleichungen, Proc. Phys.-Math. Soc. Japan 24 (1942) 551.[33] G. Birkhoff, G.-C. Rota, Ordinary Differential Equations, Ginn, Boston, 1982.[34] H. Freedman, S. Ruan, Uniform persistence in functional differential equations, J. Differ. Equ. 115 (1) (1995) 173–193.[35] J.K. Hale, Ordinary Differential Equations, John Wiley, D.C. Halth and Company, New York, 1969.[36] M.Y. Li, J.S. Muldowney, Global stability for the SEIR model in epidemiology, Math. Biosci. 125 (2) (1995) 155–164.[37] G. Butler, P. Waltmn, Persistence in dynamical systems, J. Differ. Equ. 63 (2) (1986) 255–263.[38] W.A. Coppel, Stability and asymptotical behavior of differential equations, Health Mathematical Monographs, D.C. Halth and Company, Boston, 1965.[39] J.S. Muldowney, Compound matrices and ordinary differential equations, Rocky Mt. J. Math. 20 (4) (1990) 857–872.[40] M. Fiedler, Additive compound matrices and an inequality for eigenvalues of symmetric stochastic matrices, Czech. Math. J. 24 (3) (1974) 392–402.