Drone-Rover Integrated Fire Tracker...Design • Single scissor jack • Two forward points topped...
85
Test Readiness Review Team: Amber Bishop, Daniel Collins, Brandon Cott, Syamimah Anwar Deen, Samantha Growley, Pierce Lieberman, Kelsey Owens, Nur Abd Rashid, Anthony Stanco, Matthew Stoffle, Nicholas Wiemelt Customer: Barbara Streiffert, Jet Propulsion Laboratory Advisor: Dr. Jelliffe Jackson Drone-Rover Integrated Fire Tracker 1
Transcript of Drone-Rover Integrated Fire Tracker...Design • Single scissor jack • Two forward points topped...

TestReadinessReview
Team:AmberBishop,DanielCollins,BrandonCott,Syamimah AnwarDeen,SamanthaGrowley,PierceLieberman,KelseyOwens,Nur Abd Rashid,AnthonyStanco,MatthewStoffle,NicholasWiemelt
Customer:BarbaraStreiffert,JetPropulsionLaboratory
Advisor:Dr.Jelliffe Jackson
Drone-RoverIntegratedFireTracker
1

AgendaØProjectOverview
ØMotherRoverDesign
ØTestReadinessReviewØ SoftwareandElectronicsTesting
ØModelVerification
Ø IntegratedTesting
ØSchedule
ØBudget
ØConclusion
2
ProjectOverview
TestReadiness Schedule Budget Conclusion

MissionStatement
Drone-RoverIntegratedFire-Tracker(DRIFT)willdevelopamotherrovertosecure,carry,andlevelan
UnmannedAerialVehicle(UAV)forthepurposesofgatheringpertinentenvironmentaldataregardinglocationsatriskofor
exposedtoawildfire.
3
ProjectOverview
TestReadiness Schedule Budget Conclusion

ProjectOverview
4
ProjectOverview
TestReadiness Schedule Budget Conclusion

ProjectOverview:FireTrackerSystemo Asaresultofclimatechange,wildfireseasonsarebecominghotterandlonger
• Thisallowsforawildfiretoeasilyigniteandrapidlyspread• UnitedStatesForestServiceisconsistentlyincreasingitsbudgetforwildfiremitigation,risingfrom16to50%oftheForestServiceBudgetsince19951
o Adeployablemotherroverandautonomousdroneprovidealowcostmeansoflong-rangereconnaissanceforearlydetectionofwildfires
o Thesesystemscanassistfirefightersininvestigatingareassometimesimpassiblebyground-basedmethodsalone
1TheRisingCostofWildfireOperations:EffectsontheForestService’sNon-FireWork.”UnitedStatesDepartmentofAgriculture: ForestService,4Aug.2015.
5

ProjectHeritageDRIFT willutilizeboththeINFERNO andCHIMERA hardwareandsoftwareshownbelow:
6
Project Name INFERNOINtegrated FlightEnabledRoverforNaturaldisasterObservation
Timeline 2015-2016
Overview Semi-autonomousChildDronecapableoftransportinganddeployingatemperaturesensorpackagetoalocationofinterest
Capabilities o MissionDuration: 13.5mino FullyAutonomousTakeoffatinclinations
<3.5degreeso 10m/sTranslationalFlighto Video/Imaging:720pat30fpso SensorPackage:>90%transmissionof
SPSdata
Project Name CHIMERACHIld dronedeploymentMEchanism andRetrievalApparatus
Timeline 2016-2017
Overview The landing,securing,anddeploymentsystemfortheautonomousdroneinheritedfromINFERNO(LandingPlatform)
Capabilities o CapableofsecuringCDupto200mfromGS
o DronerechargingsystemcanchargetheCDSLiPo batteryuponcommand
o Autonomouslandingfunctionalityutilizingimagerecognitionuponcommandfromgroundstation

Upto250m(500mroundtrip) Upto200m
MRpath
MRCommunicationswithGS
CDCommunicationswithGS
1
2
Wirelesscommunication
3
4
5
6
7
GroundStation
CHIMERA
INFERNO
DRIFT
MR- MotherRover
GS- GroundStation
CD- ChildDrone
8&
DRIFTMission
20° slope
MotherRoverandChilddrone
5”tallobstacle Movearound
obstacleslargerthan5”tall
LevelPlatform
DRIFTMission
Video,control,telemetry
Travelupto0.5m/s
DRIFTCONOPS
7

FunctionalBlockDiagram
8

DesignSolution
9
ProjectOverview
TestReadiness Schedule Budget Conclusion

DesignSolution:AnOverviewINFERNOChildDrone
ChargingBracket
LevelingSystem
Fixed-ChassisBody
LandingplatformSecurementMechanism

11
DesignSolution:AnOverviewTopView
Side View
FrontView
58.9in
46.3in
41.9in
TotalWeight:383.77lbs

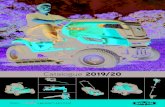
DesignModificationsfromMSRLevelingo Previousmulti-directionalsystemshownbymodelstobedynamicallyunstable
o One-directionallevelingsystemprototypebuiltandsuccessfullydemonstrated
o Pairedwithourskidsteeringcapability,thischangedoesnotimpactourabilitytomeetourrequirementsorachieveourthirdlevelofsuccess
o Budget– Saves$165.25o Schedule– Savesapproximately12.5hoursofmachining
12
Design• Singlescissorjack• Twoforwardpointstoppedwithone-
directionalpivotjoint• Bottomofjackconnectedtorover
withpivotjoint• Jackremainstoppedwithsingleball
joint.

CriticalProjectElements
13
o TranslationalSystemo FixedChassisdesignenablesthemotherrovertotraverseroughterrainincluding
finedirt,smallgravel,andlawngrass.o LevelingSystem
o Utilizesinternallevelingjackdesigntolevelthelandingplatformtotherequired3.50 necessaryforthechilddronetodeployandautonomouslylandsafely.
o ElectronicsandCommunicationo NecessaryforcommunicationbetweenGroundStationandMotherRover
o Commandslevelingsystemo Provideslivevideofeedforoperatoro CommandsMotherRoverforTranslationalmotion
o $5000Budgeto Currentlyonly$322.36 margin,improvedfromMSR$163.31margino Appliedforanadditional$675.00throughEngineeringExcellenceFund(EEF)

LevelsofSuccess
Level1• MRcantraverseoveraflatdirtpathwhilesupportingthesizeandtheweightoftheattachedLPandCD
• MRcanbedrivenbyoperatortothedesiredlocation(andback)whileoperatorwalksalongside• MRcanrelaylocationatleastat5Hzatadistanceof100mbacktoGS• MRcanbepoweredtoachievearoundtripof100m
Level2•MRcanovercomeslopes≤ 10degreesatspeedupto0.5m/s•MRcantraverseapaththathasobstacleslessthanorequalto5inchtallwhiletheCDandLPremainsecurelyfixedtoMR•MRcanleveltheplatformto𝟎° ± 𝟑. 𝟓° fortheCDtotakeoffandlandona10slope•MRcanbedrivenbyanoperatoratGSvialivevideofeedtodesiredlocation•MRcanrelaylivevideofeedandlocationatleastat5Hzforadistanceof150mtotheGS•MRcanbepoweredtoachievearoundtripof300m
Level3•MRcanovercomeslopes≤ 20degreesatspeedsupto0.5m/s•MRcanmaneuveraroundobstacleover5inchestallwhiletheCDandLPremainssecurelyfixedtotheMR•MRcanleveltheplatformto𝟎° ± 𝟑. 𝟓° totakeoffandlandona20degreesslope•MRcanrelaylivevideofeedandlocationatleastat5Hzforadistanceof250mtotheGS•MRcanbepoweredtoachievearoundtripmissionof500m
14

15
SoftwareandElectronicsTesting ModelVerification
IntegratedTesting
TestReadinessReview
ProjectOverview
TestReadiness Schedule Budget Conclusion

TestBreakdown
16
SoftwareandElectronicsTesting
ModelVerification IntegratedTesting
TippingModel/COMVerification
TractionModelVerification
DropTest
TorqueModelVerification
MotorDriver-MotorIntegrationTest
ElectronicsSystemUnitTesting
BatteryDepletionTest
LevelingSystemTest
CameraTesting
CommunicationsTest
DistanceTest
SlopeCapabilityandLevelingTest
ObstacleClearanceTest
ManeuverabilityTest
FullMissionSimulationDiscussedinthispresentation
Otherteststobecompleted
GPSTest

FacilitiesandTransportationLocationso SwitzerlandTrail(PendingTrailerAccess)oChautauqua (Testsonlyusingcomponentsnotfullroverbody)
oBackupindoormethodsprovidedweatherrestrictions
17Switzerland Trail Chautauqua Trailer
Transportationo LocallyaroundEngineeringCenter
o PalletJackso RollingCarts
o SwitzerlandTrailAccesso Trailer

Software&ElectronicTesting
18
ProjectOverview
TestReadiness Schedule Budget Conclusion

19
FunctionalRequirement
Description
FR5.0 TheMRshallpositionitselffortheCDtotake-offandlandsafelysuchthatitisabletobesecuredbytheMR’ssecurementmechanism
DR5.1 TheMRmustlevelitselfto0° +/- 3.5° ofthegravitationalnormalonaslopeupto20° aftercomingtoacompletestop.
DR5.1.1 TheMRwilluseanaccelerometertomeasuretheangleoftheLP withrespecttolevelground.
LevelingSystemSoftwareandElectronicsTestingRequirementsVerified

LevelingSystemSoftwareandElectronicsTesting
20
o Overviewo Verifythefunctionalityofthecomplete
levelingsystemwithleveling,resetting,andcalibrationcommandswiththeArduino.
o TestEquipmento LevelingJacko LevelingRelayCircuito ArduinoMegao 12VPowerSupplyo IMU
o Resultso Success forbothjacksoperating– ableto
levelusingtwojackso Inprogressforoperatingonejacksystem–
softwarehasbeentestedusingIMU,theleveling,resetting,andcalibrationcommandsarefunctional,waitingonjacktorunfulldemonstration
o RiskReductiono Fixingtheissueswithwiring,andeditingrelaycircuit

LandingPlatform
LevelingSystem-IntegrationTestSoftwareandElectronicsTestingProcedure
21
ArduinoMega
RelayCircuit
IMU
LevelingJack
PowerSupply
Power
Data
Power
Power

22
GroundStation&FullSoftwareSoftwareandElectronicsTestingRequirementsVerified
FunctionalRequirement
Description
FR1.0 TheMRshallintegratewiththeattachedlandingplatformsuchthatitispermanentlyfixedandsecurelycarriestheCDwithouttippingwhiletraversingthedefinedroughterrain.
FR2.0 TheMRshallreceivecommandsfromtheGSatarateofatleast5Hz.
FR3.0 TheMRshalltransmitdatatotheGSatarateof30HZ.
FR4.0 TheMRshall traverse 250metersawayfromtheGStoaspecifiedGPSlocation overroughterraindefinedbyvaryingslopesandobstacleswhichrequiretheMRto navigate overandaroundthem.TheMRshallreturntotheGS afterthemissioniscomplete.
FR5.0 TheMRshallpositionitself fortheCDtotake-offandlandsafelysuchthatitisabletobesecuredbytheMR'ssecurementmechanism.

GroundStation&FullSoftwareSoftwareandElectronicsTesting
23
o Overviewo Verifythefunctionalityofthegroundstation’sabilitytosendcommandsanddisplaydata,andthe
rover’sabilitytorespondtocommandso TestEquipment
o IMUo XBees
o ArduinoMegao GPSreceiver
o GScomputer
o Resultso Success fortwojacklevelingsystem– abletolevelusingtwojackso Success formotorcontrol– abletocontrolmotordriverviaArduinoMegawithDIOpinso Inprogressforoperatingonejacksystem– softwarehasbeentestedusingIMU,theleveling,resetting,
andcalibrationcommandsarefunctional,waitingonjacktorunfulldemonstrationo Inprogresswithcommunicationsystem– groundstationcontrolunderconstruction
o RiskReductiono Fixingtheissueswithwiring,andeditingrelaycircuito Placeafusebetweenthebatteryandthemotordrivertolimitpeakcurrentthroughthemotordriver

ArduinoMega
GroundStation-IntegrationTestSoftwareandElectronicsTestingProcedure
24
GroundStation
ComputertoMonitorArduino
responses
XBee
GPSReceiver
XBee
IMU
Data
Data
Data Data

MotorDriver-MotorIntegrationTestSoftwareandElectronicsTestingRequirementsVerified
25
FunctionalRequirement
Description
FR4.0 The MRshalltraverseoverroughterrainupto250metersawayfromtheGStoaspecifiedlocationofinterest.
DR4.1 TheMRshall travelataspeedwithintherangeof0to0.5m/sinforwardandreverse.
DR4.2.1 Thebatteriesshallhaveenoughpoweravailabletoprovidetothemotorsandmotordriverssuchthatthe MRisabletotraversethedefinedroughterrain
DR4.5 The MRshalltraverseupanddowna200 slope.
DR4.5.1 TheMRmotors shallprovideenoughtorque totraverseupanddownthedefinedslope.
RoughTerraino Materials:lawngrass,smallgravel,andfinedirto Varyingslopesfrom0to200o Traversableobstaclesupto5intallo Non-traversableobstaclesatleast10feetapart.

MotorDriver-MotorIntegrationTestSoftwareandElectronicsTestingCompleted:1/23/2018
26
o Overviewo Verifythefunctionalitybetweenthemotordriversandmotorswith
speed,stop,anddirectioncontrolwiththeArduinoMega.o TestEquipment
o DC60-12/24-4QMotorDrivero DigitalPotentiometerCircuito MarathonElectricDCBrushedMotoro ArduinoMegao 24VPowerSupply
o Resultso Success forbothmotors– abletocontrolmotordriverviaArduino
MegawithDIOpinso RiskReduction
o Placeafusebetweenthebatteryandthemotordrivertolimitpeakcurrentthroughthemotordriver

MotorDriver-MotorIntegrationTestSoftwareandElectronicsTestingProcedure
27
ArduinoMega
MotorDriver#1
DigitalPotentiometer
#1
Motor#1
MotorDriver#2
DigitalPotentiometer
#2
Motor#2
Data
Data
Data
Data

ModelVerification
28
ProjectOverview
TestReadiness Schedule Budget Conclusion

ModelValidation
29
TorqueModelVerificationo Overview
o Verifythatthedriveshaftandrespectivecomponentswillbestructurallycapableofdrivingtheroverwhensubjecttoforcesandtorquesduringfullmission.
o TestEquipmento CADModelofCompletedMotherRover
o ResultsExpectedo Von-Misesstresscontourso Displacementso Strains
o RiskReductiono SolidWorksmodelstoensuresuccessbeforephysicaltesting
DropTesto Overview
o Verifythatallrovercomponents(I.e.CHIMERALandingPlatform,levelingsystem,roverhousing,andtranslationalsystem)remainstructurallysound afterdroppingfromaheightof5inches
o TestEquipmento Solidworks modelsimulation
o ResultsExpected• VonMisesstresscontours• Displacements• Strains
o RiskReductiono SolidWorksmodelscompletetoensuresuccessbefore
physicaltesting

TorqueModelTestModelValidationProcedure
30
DefineComponentMaterials
SetAllComponentConnections
(Rigid&Flexible)
InputParameters
MeshGeneration
MeshControls
ErrorReduction
RunTorqueSimulation
DefineExternalForcesandMoments
GeometricBasis
TestDefinition
Stress
Displacement
Strain
Results
DefineFixtures

DropTestModelSimulationProcedure
31
DefineComponentMaterials
SetAllComponentConnections
(Rigid&Flexible)
InputParameters
MeshGeneration
MeshControls
ErrorReduction
RunDropTestSimulation
DefineDropTest
Characteristics
GeometricBasis
TestDefinition
Stress
Displacement
Strain
Results

IntegratedTesting
32
ProjectOverview
TestReadiness Schedule Budget Conclusion

CommunicationsTestRequirements
33
FunctionalRequirement
Description
FR2.0 TheMRshallreceivecommandsfromtheGSat5Hz.
DesignRequirement Definition
DR2.1 TheMRshallrecordalog ofreceivedcommandsfromtheGSdetailedinDR2.4.
DR2.2 TheMRshallreceivesignalswithasignaltonoiseratioofatleast6dB-Hz(industrystandard).
DR2.3 TheMRshallreceivecommandsatadistanceof250meters.
DR2.4 ThecommandstobereceivedbytheMRfromtheGSinclude:forward/backwardtranslationalmotion,turningmotion,toturnon/offtheMRvideofeed,opening/closingtheCDsecurementmechanism,andtoleveltheLP.
FunctionalRequirement
Description
FR3.0 TheMRshalltransmitspecifieddatatotheGSat30Hz.
DesignRequirement Definition
DR3.1 TheMRshalltransmititscurrentGPSlocation totheGSwithanaccuracyof5m.
DR3.2 TheMRshalltransmitlivevideofeedat1080pat30fpstotheGS

CommunicationsTestIntegratedTesting
34
o Overviewo MeasurewhethertheMRcantransmitdesireddatainspecifiedenvironmentsatspecifiedrates
o TestEquipmento FullCommunicationsSystem
o Including XBees andcamerasandcorrespondingantennaso GroundStationo ChatauquaMountainPark
o ResultsExpectedo SignaltoNoiseRatioo Frequencyofdatareceivedo Frequencyofdatasento Latencyo Maxdistanceintreescapableofcommunicating.
o RiskReductiono Onlyusingsuitetopreventmovingwholeroverandmakingdatacollectioneasier
Ground Station
61.9m.
CommunicationsSystem
188.1m.
Forestwithtrees~10ft.apart

35
GSMove5mFartherfromMR

Maneuverability TestRequirements
36
FunctionalRequirement
Description
FR4.0 TheMRshall traverse250metersawayfromtheGStoaspecifiedGPSlocationoverroughterraindefinedbyvaryingslopesandobstacleswhichrequiretheMRtonavigateoverandaroundthem.TheMRshallreturntotheGSafterthemissioniscomplete.
DesignRequirement
Definition
DR4.3 TheMRshallturn90degreesina10ft.radius

ManeuverabilityTestIntegratedTesting
37
o Overviewo Verifiesthatrovercanexecutea90 degreeturnendingatmost10ft frombeginningpositionoftherover
o TestEquipmento FullRovero GroundStationo Markero TapeMeasure
o ResultsExpectedo Distanceinbetweencenterofroverbeforeandafter90degreeturn
o RiskReductiono Testincleararea.Observingturncarefullyandmakesurenodangertorover.
Forward
Forward
TurningRadius

ManeuverabilityTestIntegratedTesting
38
Createcircle10ft.inradiusfromcenterofrover and
markstartlocation
ExecuteTurningcommand Executeturning
command
RECORDDATAANDENDTEST
Recorddistancefromstartpointtocenter
ofrover
Checklocationofcenterofroverrecord
whetherincircle
Hasnotturned90°
Hasturned90°

TranslationalSystemRequirements
39
FunctionalRequirement
Description
FR4.0 TheMRshall traverse250metersawayfromtheGStoaspecifiedGPSlocationoverroughterraindefinedbyvaryingslopesandobstacleswhichrequiretheMRtonavigateoverandaroundthem.TheMRshallreturntotheGSafterthemissioniscomplete.
DesignRequirement
Definition
DR4.5 TheMRshalltraverseupanddownaslopeof20degrees.
FunctionalRequirement
Description
FR5.0 TheMRshallpositionitselffortheCDtotake-offandlandsafelysuchthatitisabletobesecuredbytheMR'ssecurementmechanism
DesignRequirement Definition
DR5.1 TheMRshalllevelitselfwithin3.5degreesaftercomingtoacompletestop.
DR5.2 TheMRshallholdacompletelystoppedpositiononaslopeof20degrees

SlopeCapabilityandLevelingTestIntegratedTesting
40
o Overviewo VerifiestheMRiscapableoftraversinga20° slopeupthedefinedrough
terrain.o VerifiesMRiscapableoflevelingLPwithin3.5 ° whenstoppedon20 °
slopeo TestEquipment
o Slopeof20degrees(SwitzerlandTrail)o Fullrovero GroundStationo TapeMeasureo Stopwatch
o ResultsExpectedo Maximumslopecapableo Timetolevelo Distancerovertravelsduringlevelingo Verificationorfailureof20degreeslope
o RiskReductiono Utilizecenterofgravitymodeltoconstrainmaximumslopewithout
tippingo Havemanyteammembersathandincaseofemergency.o Moniterbatteryforinfieldteststofacilitateloadingandunloading.
20oSwitzerlandTrail
GroundStation
LeveltheLPwhileonslope

SlopeCapabilityandLevelingTestIntegratedTesting
41
Placeroveratthebase
Driveroverupslope markwheellocation
Sendlevelingcommand andbegintimer
Endtimerandmeasuremovement
ofwheel
Drivedownslopeandcheckspeed
RECORDDATAANDENDTEST
ContinueLeveling
Ifoutsideofrequiredthreshold
Ifinsideofrequiredthreshold

ScheduleBreakdown
42
ProjectOverview
TestReadiness Schedule Budget Conclusion

ManufacturingSchedule
43
DarkBlue:%CompleteLightBlue:InProgress
DarkOrange:%CompleteLightOrange:InProgress
SpringBreak
Hardware&ElectricalFinalIntegration

TestingSchedule
44
DarkGreen:%CompleteLightGreen:InProgress
Hardware&ElectricalFinal
Integration
Symposium
SpringBreak

Electrical/SoftwareSchedule
45
DarkBlue:%CompleteLightBlue:InProgressLightTurquoise:Non-Test
SpringBreak

FinancialStatusUpdate
46
ProjectOverview
TestReadiness Schedule Budget Conclusion

FinancialStatus:SubsystemsBudgetMSRBudget
47
TRRBudgetWhatChanged?oCommunications
o Foundpartsfrompreviousyears
o LevelingSystemo Changeindesign– reducedcost
o Translationalo Additionofpins,connectors,shaftkey,chaintensioners
o Receivedmetalplatesforfree
o Shippingo Developedmoreaccurateestimates
AmountSpent:$3,375.88

FinancialStatus:MajorComponentProcurementArrived(3/2/2018)
o 2BisonGearMotorso 2AmericanControlMotorDrivers
o RoverRawMaterials
o 2LevelingJacks
o ArduinoMegaMicrocontroller
o Wheels,Tires,Bearings
o 2Cameras
o AluminumPlates
48
En Routeo 2Xbee Pros
EEF(3/15/2018)o 212V100AhBatterieso Backupcomponents
o Indoortestingcomponents
o Additionalallocationtoprintingposters/reports
MajorcomponentstobepurchasedbyMarch9EEFcomponentstobepurchasedbyMarch22
Plannedo LevelingRawMaterialso Chains,connectors,tensioners
o Electronicsconnections

Conclusion
49
oChangesfromMSR• LevelingSystemModifications
oSchedule• UnitTestingforElectrical/Software85%Complete• ManufacturingandIntegrationofsubsystempartswillbecompletedbyMarch23rd
• IntegratedTestingwillbeginonApril
ProjectOverview
TestReadiness Schedule Budget Conclusion

Questions?
50

BackupSlides
51

ScheduleBackup
52

53

Electrical&SoftwareBackup
54

Electrical&SoftwareUnitTesting
GPS
IMU
MotorDriver
BatteryMonitor
Arduino
GroundStation
XBee
JackControl
Motors
XBee
MotherRover
Computer
LEGENDCompleted
CommunicationLink/Interface
FutureWork
InProgress
VideoTransmitterCameras
VideoReceiver Monitor
5/5
60/60
6/8
6/6
20/20
0/8
23/25
6/40 3/3
129/175
Hours/Total
55

SpeedTorqueCurveWithReducer
56

SpeedTorqueCurveWithoutReducer
57

GPSTestSoftwareandElectronicsTesting
58
o Overviewo VerifythepositionalaccuracyoftheGPSincludingwhenitissurroundedbymetals
o TestEquipmento GP20U7o OpenLogger– DEV-13712o ArduinoMegao 2GBmicroSDCardo microSDCardAdapter
o RiskReduction

59
GPSTestSoftwareandElectronicsTesting
GPS ArduinoMega
OpenLogger
Computer
Data Data
Data

GPSFunctionality&MetalsTest2/26/2018
60
Purpose ThistestservestoprovideevidenceforwhetherornotmetalsaffecttheGPSreadingsfromtheGP20U7
Results SUCCESS – metaldoesnotproducesignificantchangesinGPSreadings
Test:NoMetal
Test:Metal

GPSTestingIntegratedTesting• ConductedonFebruary28th2018• Collected4setsof5-10minutedatasets
• KnownGPSlocation(40°00'00.3"N105°15'41.0"W)
• OpenSpace• ApproximatelyMissionDefined(Trees10ftapart)
• GreaterInterferencethanMissionDefined.Denserforestandunderalog.
• FindAccuracywithknownGPSthenfindhowforestenvironmenteffectedGPSreadings.• AttempttoVerifyDR3.1(GPSaccuracyof5m.inmissionenvironment)
61
KnownLocation OpenSpace
MissionAnalog GreaterInterference

62
GPSTestingIntegratedTesting• InitialDataAnalysis– UseaGPSplotterandconstructa5mcircletofindpointsvariationwithrespecttotherequirement
• HighpercentageofconfidenceinmissionGPSbeingwithin5mofactual.• Willperformmoreanalysistoquantifythisconfidence
Legend
5mradiuscicle
GPSpointsreceivedKnownLocation
OpenSpace
MissionSimulated
HighDensityEnvironment

CameraTestingSoftwareandElectronicsTestingRequirementsVerified
63
FunctionalRequirement
Description
FR3.0 TheMRshalltransmitdatatotheGSatarateof30HZ.
DR3.2 TheMRShallTransmitLiveVideoFeedat1080pat30 fps.ValidationandVerification:

CameraTestingSoftware&ElectronicsTestingo Overview
o TwocamerasusedforMRnavigationo LivevideotransmittedfromMRtoGS
o TestEquipmento 900TVLWDRFatShark Camerao Foxeer HS1177V22.8mmMiniFPVCamerao Two5.8GHzTransmitterso 3 5.8GHzAntennaso NexWave RFReceivero Monitor withAVConnection
o RiskReduction
64
FatShark Camera
Foxeer Camera

CameraTestingSoftware&ElectronicsTestingProcedure
65FatShark Camera
Foxeer Camera
12VPowerSupply
5.8GHZTransmitter
5.8GHZTransmitter
RFReceiver
12VPowerSupply
5.8GHzAntenna
5.8GHzAntenna
PowerData
Status:80%Completed

66
Date Test
01/22/2018 MotorDriverElectricalFunctionalityTest
01/22/2018 MotorDriverCommandTest
01/23/2018 MotorDriver– MotorIntegrationTest
02/05/2018 DigitalPotFunctionalityTest
02/06/2018 MotorDriver,Motor,andDigitalPotentiometerTest
02/09/2018 MotorDriver,MotorCommandsTest
02/19/2018 TwoPermanentlyCircuitedDigitalPotentiometerswithMotorsandMotorDriversTest
MotorDriverTestingBreakdown

Purpose Testtheelectricalfunctionalityofthemotordriversat12Vwithasmallmotor.
Results SUCCESS – canbeginprogrammingtheArduinoMegatocontrolthemotordriver.
67
MotorDriverFunctionalityTest1/22/2018

BatteryDepletionSoftwareandElectronicsTestingRequirementsVerified
68
FunctionalRequirement
Description
FR4.0 The MRshalltraverseoverroughterrainupto250metersawayfromtheGStoaspecifiedlocationofinterest.
DR4.1 TheMRshall travelataspeedwithintherangeof0to0.5m/sinforwardandreverse.
DR4.2.1 Thebatteriesshallprovideenoughpowertothe motors suchthatthe MRisabletotraversethedefinedroughterrain
DR4.5 The MRshalltraverseupanddowna200 slope.
DR4.5.1 TheMRmotors shallprovideenoughtorque totraverseupanddownthedefinedslope.
RoughTerraino Materials:lawngrass,smallgravel,andfinedirto Varyingslopesfrom0to200o Traversableobstaclesupto5intallo Non-traversble obstaclesatleast10feetapart.

BatteryDepletionSoftware&ElectronicsTesting
o Overviewo Toprovideevidencethatthetranslationalmotorsandscissorjack
motor(s)willbedeliveredenoughpowerthroughoutthedurationofthemission
o Verifycurrentdrawfrommotorsbyapplyingloadstomotorsandmeasuringcurrentdrawandremainingbatteryvoltage
o TestEquipmento MarathonElectricDCBrushedMotoro ScissorJackMotor(s)o 12V55/100AhBatterieso BatteryMonitoro Voltmetero Ammeter
o ResultsExpectedo The12V55Ahbatteriesborrowedwillnotprovidesufficientpowerfor
theexpecteddurationofthemissiono IfEEFfundingisreceived,the12V100Ahbatterieswillbepurchasedand
willundergothesametest
o RiskReductiono Implementingabatterymonitortocalculatebatteryvoltage 69
12V55Ah
12V
TranslationalMotors
ScissorJackMotors
24V
12V55Ah
LEGEND60ASlowBlowFuse
VoltageRegulatorAmmeterVoltmeter

70
ModelVerificationBackup

COG
71
o Overviewo Locate thecenterofgravityoftheroverinall3- axisbytakingweightexperiencedon4scalesonceallthatthesamelevelandagainwithtwoscaleselevated.
o Re-executethetippinganalysistofindthemaximumslopetherovercanovercomewithouttipping
o TestEquipmento 4Scaleso FullyConstructedRoverwithChildDrone
o ResultsExpectedo CenterofGravityofRovero Maximumslopebeforetipping
o RiskReductiono Verifysecurityofroveratallstages

Friction
72
o Overviewo Findcoefficientoffrictionandcomparetomodel.o Pushroveruntilitmoveswhilerecordingforceanduseforceandweighttofindcoefficientoffriction
o TestEquipmento Twoscaleso Rovero Teammates
o ResultsExpectedo CoefficientofFriction toverifytorquemodel
oRiskReductiono Onlyusingstrengthenedareasofroverforpushing

LevelingSimulationModelValidation
73
o Overviewo Verifies thedynamicsofthelevelingsystemwithtwosmall
scalemodels
o TestEquipmento T-slottedframingtofunctionasscissorjackso Plywoodo MiniatureU-jointso BallJointso Springso Hinges
o ResultsExpectedo Thesimulationisexpectedtodemonstratethedynamicsof
thelevelingsystempriortocompleteconstruction,allowingforthedeterminationofwhichfinalizedsystemtouse.
o RiskReductiono Noriskstoproject
1-DSystemModel Spring-supportedsystemmodel

74

Software
75
o Overviewo Sendtheentirecontrolschemetotheroverandverifyeachcommandisexecutedproperly
o Forwardo Reverseo Turningo Levelingo Cameracontrol
o TestEquipmento Rovero GroundStation
o ResultsExpectedo Executionofallcommands
oRiskReductiono ConductinsidewithGSnearrovertonothavetomoveroverandmaximizetestingwindow.

IntegratedTestingBackup
76

77
Distance/BatteryCapabilityTesto Overview
o Measure distancetherovercantraverseonthespecifiedterrainwithafullbattery.
o Requirement500mtotalcapability
o TestEquipmento Distancemeasurementtoolo FullRovero FullCommunicationSuite
o ResultsExpectedoDistancecapableonfullbatteryo Speed
o RiskReductiono Makesurebatterycanbechargedorreplacedtoreturn

DistanceBatteryCapabilityTest
78
Arrive atTestSightwithFullBattery
Mark StartingPointofRover
Begin TimerandBeginForwardTranslation
ContinueTranslationand CollectData:Speed
CameraSignalqualitySignaltoNoiseRatio
FrequencyofsentsignalFrequencyofreceivedsignalAnyFailuresoranomalies
Stop Timer
Battery diesorotherfailureUse DistanceWheeltomeasuredistancetraveledfromstartingpointtofinal
location
Record DataandENDTEST

ObstacleClearance
79
o Overviewo Verifythattherovercanovercome5in. Obstacleso Findthemaximumheightobstacletherovercanachieve.
o TestEquipmento Variousheightobjectso FullRovero FullCommunicationSuite
o ResultsExpectedoMaximumobstacleheightachievable
o RiskReductiono Constructionofadroptestwithsolidworkso Checkfordeformationsonroveraftereachobstacle

ObstacleClearance
80
FindObstacles ofvarioussizeshavea heightbeawholenumberofinches +- 1/8in.
Put anobstaclenear1in.InfrontoftheRover
AttemptTranslationoverobstacle CheckforDeformations
Recordheightof lasttranslationENDTEST
TranslationSuccessful nounsafe/criticaldeformation
UnsuccessfulTranslationorDeformationdeemedunsafe/critical

FullMissionSimulation(TimePermitting)
81
• RequirementsSatisfying: DR4.2• GeneralGoal: Executeanentiremissionasdefinedbytherequirementsforcompletion.• DataRequired:Passfailureofmission• TasksRequiredbeforeTestExecution:Fullconstructionandintegrationofroverandsoftware• LocationUsed:SwitzerlandTrail

PoorWeatherBackupTests
• ObstacleTest– Conducttestsamebutindoors• Nonidealduetolackofdefinedterrain.Indoorgroundmorelikelytoleadtodropdanger
• Maneuverability– Conducttestbutindoorswithdirtunderroverbudgetpermitting• Difficultywithprovidingdefinedterraininlargeenoughareafortest
• Communications– Outdoorsbututilizewarmthprotectionorrainprotectionasneeded.(Tarp,insulation,umbrellaetc.)• Distance/Battery- UsehallwayinEngineeringCenterorusinggrassyareanearEngineeringCenterifBouldernotweatherconstrained• Nonidealduetolackofdefinedterrain
• SlopeCapabilityandLeveling– Construct20degreeslopeandcoverindirt.• Requiresextrabudgetandrequiresalargeconstructiontoaccommodatethesizeoftherover
82

ModelBackupImages- Mesh
83

GearMesh
84

RimMesh
85