
Dr. Nabil I. El Sawalhi -...
29
Planning & Scheduling Dr. Nabil I. El Sawalhi Assistant Professor of Construction Management Chapter 3 PLanning & Scheduling L3 1
Transcript of Dr. Nabil I. El Sawalhi -...

Planning & Scheduling
Dr. Nabil I. El Sawalhi
Assistant Professor of
Construction Management
Chapter 3
PLanning & Scheduling L31

Planning• Successful Project Management depends on
continues planning.
• The activities of Designers, Manufacturer, Suppliers & Contractors and all their resources have to be organized & integrated to meet the project objectives.
Purpose of Planning:
• To persuade people to perform before delaying other people involved in the project activities.
• To provide a framework for decision making in the event of change.
PLanning & Scheduling L32

Activity/Tasks• Activities consume resources (materials, labor,
Time, Equipment) which are the productive aspects of the project.
• Sequence of activities will be linked on a time scale to ensure that priorities are identified.
• It should be expected that a plan will change.
• Plans must be updated quickly and regularly.
• The plan should be simple and flexible to be understood & updated quickly
PLanning & Scheduling L33
Six Methods of Scheduling
• Activity On Arrow (AOA)
• Activity On Node (AON)
• GANTT Chart (Bar Chart)
• Line of Balance
• Program Evaluation & Review Technique (PERT)
• Simulation (Mont-Carlo)
PLanning & Scheduling L34

Networks
• AON Network
Activity On Node
• AOA Network
Activity On Arrow
PLanning & Scheduling L35

Critical path method (CPM)• CPM “critical path method” identifies those chains of
activities in the project that control how long the project will take.
• the critical path can be defined as the longest possible path through the "network" of project activities
There are two variations of CPM
• The traditional technique is called activity-on-arrow (A-on-A), or an arrow diagram, because the activities are represented in the network as arrows or lines.
• The alternative approach is activity-on-node (A-on-N); it’s also called the precedence diagram.
PLanning & Scheduling L36

Activity-on-arrow (A-on-A)/activity-on- Node (A-on-N) Diagrams
• Activity-on- Node (A-on-N) Diagram have the following advantages on Arrow diagram:
• Flexibility since logic is defined in two stages.
• Dummy activities are eliminated.
• Revision and introduction of new activities is simple.
• Overlapping and delaying of activities is easily defined.
• Use of pre-printed sheets is possible.
PLanning & Scheduling L37

Example 1. Set of Project Activities and
Precedence use AON
Task Predecessor
a --
b --
c a
d b
e b
f c, d
g e
PLanning & Scheduling L38

Stage 1 of AON Network
PLanning & Scheduling L39

Stage 2 of AON Network
PLanning & Scheduling L310

A Completed AON Network
PLanning & Scheduling L311

Stage 1 of AOA Network
PLanning & Scheduling L312
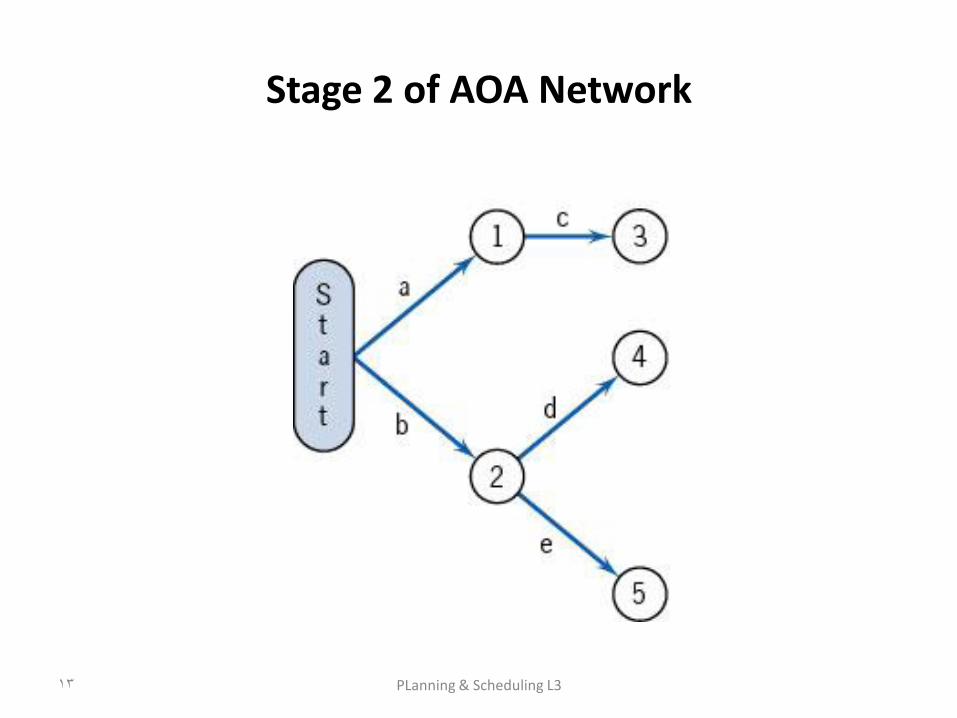
Stage 2 of AOA Network
PLanning & Scheduling L313

A Completed AOA Network
PLanning & Scheduling L314

A Completed AOA Network Using a Dummy Task
PLanning & Scheduling L315

Example 2. Find the Critical Path and Critical Time
Activity Predecessor Duration
a -- 5 days
b -- 4
c a 3
d a 4
e a 6
f b, c 4
g d 5
h d, e 6
i f 6
j g, h 4
PLanning & Scheduling L316

Stage 1 of AON Network
PLanning & Scheduling L317

Complete Network
PLanning & Scheduling L318

Float
• Float is a period of time that will be used to adjust the timing of activity to obtain best possible use of resources.
• Total Float: is the difference between activities earliest and latest starts or finishes.
• Free Float: is the min difference between the earliest finish time of that activity and the earliest start time of the succeeding activity.
•
PLanning & Scheduling L319

Start and finish• Early Start (ES): the earliest time that an activity can
start as determined by the latest of the early finish of all immediately preceding activities.
• Early finish (EF): The earliest time that an activity can finish. It is determined by adding the duration of the activity to the early start of the activity.
• Late Finish(LF): the latest time that an activity can be finished without dealying the project.
• Late Start (LS): the latest time that an activity can start without delaying the project completion. It is determined by subtracting the duration from the late finish of the activity.
PLanning & Scheduling L320

Precedent notation
Early Finish (EF)
Total Float (TF)
Early Start(ES)
ActivityName
Late Finish(LF)
Duration(D)Late Start
(LS)
PLanning & Scheduling L321
Logical relationships between activities
Four logical relationship do exist:
• Finish to start (FS):the successor task can’t start until the predecessor task finishes.
• Start-to-Finish (SF): the successor task cannot finish until the predecessor task starts.
• Start-to-Start (SS): the successor can’t start until the predecessor starts.
• Finish-to-Finish (FF) : the successor task can’t finish until the predecessor task finishes.
PLanning & Scheduling L322

• Activities that have different early and late start times (i.e., ES(i,j) < LS(i,j)) can be scheduled to start anytime between ES(i,j) and LS(i,j)
• The concept of float is to use part or all of this allowable range to schedule an activity without delaying the completion of the project
• if E(i) + Dij < L(j), then some float is available in which to schedule this activity.
PLanning & Scheduling L323

• if one activity is allowed to float or change in the schedule, then the amount of float available for other activities may decrease
PLanning & Scheduling L324

Example
PLanning & Scheduling L325

Example
• Construct a precedence diagram assuming no research restrictions and calculate the minimum duration of project.
• Schedule the earliest and latest start and finish for each activity and show the critical path method.
• If activity F is extended to a duration of 15 days, what is the effect on critical path
PLanning & Scheduling L326

PLanning & Scheduling L327

Precedence diagram
PLanning & Scheduling L328
Traditional Statistics Versus Simulation
• Similarities
– must enumerate alternate paths
• Differences
– simulation does not require assumption of path independence
PLanning & Scheduling L329


















