DIY Quadcopter with 51 MCU C8051F 2212 KV930 Motor German EPP1045Diy the quadcopter
19
DIY the Quadcopter Are you dreaming about DIY a cool quadcopter by yourself one day? Today ICStation Team will share you the making steps with a lot of ultra-clear pictures. The quadcopter we introduce to you uses framework of 51MCU and all modules of system based on C8051F.The rack is made of electric straight liner and tube socket with hard disk slice.The motor uses 2212 KV930. The front and back side of propellers use German EPP1045. 1.Prepare two Hard Disk. These are two second-hand hard disk. 2.Install the base of electric straight liner
-
Upload
wanita-long -
Category
Technology
-
view
94 -
download
1
description
The quadcopter we introduce to you uses framework of 51MCU and all modules of system based on C8051F.The rack is made of electric straight liner and tube socket with hard disk slice.The motor uses 2212 KV930. The front and back side of propellers use German EPP1045.
Transcript of DIY Quadcopter with 51 MCU C8051F 2212 KV930 Motor German EPP1045Diy the quadcopter

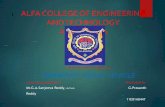
DIY the Quadcopter
Are you dreaming about DIY a cool quadcopter by yourself one day?Today ICStation Team will share you the making steps with a lot of ultra-clear pictures. The quadcopter we introduce to you uses framework of 51MCU and all modules of system based on C8051F.The rack is made of electric straight liner and tube socket with hard disk slice.The motor uses 2212 KV930. The front and back side of propellers use German EPP1045.
1.Prepare two Hard Disk.
These are two second-hand hard disk.
2.Install the base of electric straight liner

3.Prepare and install the main parts of engine body.

4.Use Desktop miniature bench drill to process rack.

5.Use the original propeller protector to fix these two EPP1045 propellers .

6.Weld Banana pin
7.Install and fix the motor

8.The whole structure of rack.
9.To modify the remote control FT06-C

Based on the cheap and big size FT06-C, add two ratio channel and LCD to display the relevant parameter.Leave the high frequency control head and replace whole PPM encoding board.

10.Cutting the board with the specialized knife.

11.Take down the original PPW board of FT06-C

12.Put one board in this place.
13.Add a 5110 LCD in this place of FT06-C

14.Weld the PPM control board

15.Successfully light the LCD
16.Look the whole effect after adding the LCD.

17.Install the potentiometer of the left and right side.

18.Wire the LCD and potentiometer
19.Look the tew added potentiometer.

20.Increase the height of potentiometer knob
21.Calibration the central point of the rocker in engineering mode.
22.Display valid values of PPM in front 6 channels when working.

23.The PPM waveforms of 8 channel displaying through the receiver
24.Flight testing in G3.5