DISTRIBUTEDENERGYRESOURCENETWORKS › file › druid:kp454xc7379 › tobe...Ramesh Johari. I enjoyed...
124
DISTRIBUTED ENERGY RESOURCE NETWORKS: PLANNING, CONTROL AND MARKET DESIGN A DISSERTATION SUBMITTED TO THE INSTITUTE FOR COMPUTATIONAL AND MATHEMATICAL ENGINEERING AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Junjie Qin December 2017
Transcript of DISTRIBUTEDENERGYRESOURCENETWORKS › file › druid:kp454xc7379 › tobe...Ramesh Johari. I enjoyed...

DISTRIBUTED ENERGY RESOURCE NETWORKS:
PLANNING, CONTROL AND MARKET DESIGN
A DISSERTATION
SUBMITTED TO THE INSTITUTE FOR
COMPUTATIONAL AND MATHEMATICAL ENGINEERING
AND THE COMMITTEE ON GRADUATE STUDIES
OF STANFORD UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
Junjie Qin
December 2017

This dissertation is online at: http://purl.stanford.edu/kp454xc7379
© 2017 by Junjie Qin. All Rights Reserved.
Re-distributed by Stanford University under license with the author.
ii

I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Ram Rajagopal, Primary Adviser
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Abbas El Gamal
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Ramesh Johari
Approved for the Stanford University Committee on Graduate Studies.
Patricia J. Gumport, Vice Provost for Graduate Education
This signature page was generated electronically upon submission of this dissertation in electronic format. An original signed hard copy of the signature page is on file inUniversity Archives.
iii

Abstract
Distributed energy resources (DERs), such as energy storage and distributed generation,
are rapidly replacing centralized power generation due to their environmental, economic
and resiliency benefits. Integrating DERs into power network presents new challenges to
power system planning, control and market design.
In the first part of the thesis, we analyze a simple greedy strategy for the planning
problem of placing energy storage in a power network. Using structural characterizations
of the underlying power network control problem, we identify conditions under which the
placement value function is submodular so that the greedy strategy has a performance
guarantee. We then develop a computational procedure to certify these conditions for any
given problem instance based on multi-parametric programming.
In the second part of the thesis, we consider the stochastic control problem for operating
energy storage devices connected in a power network. As the exact solution of the problem
based on dynamic programming suffers from the curse of dimensionality, we propose a
simple online algorithm for the problem utilizing a stabilized greedy (myopic) controller.
For a rather general setting, we establish performance guarantees for the proposed method.
Finally, we study fundamental requirements for power network reliability in designing
novel power markets to integrate DERs. We demonstrate a transaction or trading based
market, on top of a system operator implementing these reliability requirements, could
achieve the same efficiency as centralized stochastic dispatch. We also obtain structural
results for radial networks which indicate efficient market outcomes can be reached with
bilateral trading for distribution networks.
iv

Acknowledgments
First and foremost, I am greatly indebted to my thesis advisor Professor Ram Rajagopal who
led me into this exciting area of power systems. He taught me how to conduct practically
relevant research, from reading the right paper/report and talking to the right person,
to formulating the right problem and presenting to the right audience. I am particularly
grateful to the freedom Ram has given me in taking courses and collaborating with faculty
and students in and out of Stanford campus. Together with Ram’s guidance, this unique
experience has defined the interdisciplinary pathway of my research, fusing control theory
and economics with practical power system problems. I could hardly imagine that I can go
this far on this path without the encouragement, support and intellectual stimulation from
Ram.
I am grateful to my thesis committee members, Professor Abbas El Gamal and Professor
Ramesh Johari. I enjoyed every smart grid algorithm meeting with Abbas and admire his
ability of resolving a difficult problem by asking simple questions. Ramesh’s suggestions on
modeling have been invaluable to me and will serve as the guide for my future research. I
would also like to thank my defense committee members, Professor Yinyu Ye and Professor
Walter Murray. Yinyu’s advice on looking at the simplest setting first is the major reason
that I could obtain the results in Chapter 2 of this thesis. Walter’s course has shaped my
understanding of numerical issues in solving large scale optimization problems, which has
been extremely helpful when implementing algorithms proposed in this thesis.
I have also benefited significantly from my collaborators during the past six years. In
particular, I would like to express my sincere appreciation to Professor Pravin Varaiya, Pro-
fessor Kameshwar Poolla, Professor Adam Wierman, Professor H. Vincent Poor, Professor
Andrea Goldsmith, Professor Amin Saberi, Professor Rahul Jain, Professor Baosen Zhang,
Professor Yue Zhao, Professor Rishee Jain, Proessor Insoon Yang, Professor Wenyuan Tang,
Han-I Su, Yinlam Chow, Jiyan Yang, Shai Vardi, Vahid Liaghat, Raffi Sevlian, Anthony
Kim, Jiafan Yu and Jonathan Mather. Working with and learning from them have enriched
not only my research but also my professional and personal life.
My sincere thanks also go out to my friends and colleagues in the Stanford Sustainable
Systems Lab. In no particular order, they are Chin-Woo Tan, Yang Yu, Xiao Chen, Yizheng
Liao, Gustavo Cezar, Matt Kiener, Sid Patel, Aaron Goldin, Camille Pache and Jianxiao
v

Wang.
Finally, I would like to thank my parents and my wife, for their support and unconditional
love, and for making my life as exciting as my work.
vi

Contents
Abstract iv
Acknowledgments v
1 Introduction 1
1.1 The Rise of Distributed Energy Resources . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Drivers and Trends for DERs . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.2 Challenges in DER Integration . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Outline and Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Chapter 2: Planning of Energy Storage . . . . . . . . . . . . . . . . . 5
1.2.2 Chapter 3: Stochastic Control of Distributed Energy Storage . . . . . 6
1.2.3 Chapter 4: Flexible Market for Smart Grid . . . . . . . . . . . . . . . 6
2 Planning of Energy Storage 8
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.2 Proposed Work and Its Contributions . . . . . . . . . . . . . . . . . . 10
2.1.3 Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.2 Power Flow Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.3 Energy Storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.4 Economic Dispatch with Optimal Storage Control . . . . . . . . . . . 13
2.2.5 Storage Placement as Combinatorial Optimization . . . . . . . . . . . 14
2.2.6 Outline of Proposed Analyses . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Structures of Optimal Cost and Prices . . . . . . . . . . . . . . . . . . . . . . 17
2.3.1 Dual Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.2 Optimal Prices and Second Order Sensitivity . . . . . . . . . . . . . . 20
2.4 Submodularity of Placement Value Function . . . . . . . . . . . . . . . . . . . 22
2.4.1 Two-Bus Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
vii

2.4.2 Verification of Submodularity Using a Polyhedral Characterization of
Critical Regions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4.3 Modified Greedy Algorithms . . . . . . . . . . . . . . . . . . . . . . . 29
2.4.4 Risk-Aware Placement . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5 Numerical Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.1 IEEE 14 Bus Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.2 Other Test Cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3 Stochastic Control of Distributed Energy Storage 35
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.2 Centralized Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.3 Cluster based Distributed Control . . . . . . . . . . . . . . . . . . . . 40
3.3 Online Modified Greedy Algorithm for Networked Storage Control . . . . . . 41
3.3.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.2 Performance Guarantees . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4 Distributed Online Control Via Alternating Direction Method of Multipliers . 46
3.4.1 Node-Edge Reformulation . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.2 Cluster-based Implementation . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 Numerical Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.5.1 Star Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.5.2 IEEE 14 Bus Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.5.3 Scalability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.6 Conclusion and Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . 52
4 Flexible Markets for Smart Grid 54
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1.1 Contributions and Organization . . . . . . . . . . . . . . . . . . . . . . 56
4.1.2 Related Literature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2.2 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.3 Uncertainty Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.4 Participant Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.5 Efficiency Benchmark . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3 Trading Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Economic Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.5 Price Discovery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
viii

4.6 Arrow-Debreu Equilibrium . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.7 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.8 Concluding remarks and open questions . . . . . . . . . . . . . . . . . . . . . 73
5 Conclusions 75
A Appendices of Chapter 2 76
A.1 Expression of the Shift Factor Matrix . . . . . . . . . . . . . . . . . . . . . . 77
A.2 Proof of Proposition 2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
A.3 Proof of Lemma 2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A.4 Proof of Lemma 2.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A.5 Proof of Theorem 2.1 and Corollary 2.1 . . . . . . . . . . . . . . . . . . . . . 79
A.6 Proof of Theorem 2.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.7 Proof of Theorem 2.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.8 Proof of Lemma 2.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
A.9 Proof of Theorem 2.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
B Appendices of Chapter 3 84
B.1 Definitions and Expressions for Section 3.3 . . . . . . . . . . . . . . . . . . . . 85
B.2 Proof of Theorem 3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
B.3 Derivation of the ADMM Algorithm . . . . . . . . . . . . . . . . . . . . . . . 91
C Appendices of Chapter 4 93
C.1 Proof of Theorem 4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
C.2 Proof of Lemma 4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
C.3 Proof of Lemma 4.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
C.4 Bilateral Trading in Tree Network . . . . . . . . . . . . . . . . . . . . . . . . 98
C.5 Trade Verification and Curtailment with Local Scenarios . . . . . . . . . . . . 101
Bibliography 103
ix

List of Tables
4.1 Power injection (unit: MW) of the initial trade proposed by the particpants. 72
4.2 Power injection (unit: MW) of the curtailed trade. . . . . . . . . . . . . . . . 73
4.3 Power injection (unit: MW) of the accumulated trade γp+∆p. . . . . . . . . 73
x

List of Figures
1.1 Generation types in U.S. annual capacity additions . . . . . . . . . . . . . . . 3
1.2 Installed price trends of distributed solar generation in the U.S. . . . . . . . . 4
1.3 Price trends of Lithium-Ion battery (cell and pack only) . . . . . . . . . . . . 4
2.1 Venn diagram for the set of all possible storage placement problem instances. 12
2.2 Critical regions for the two-bus examples. In the figure with a slight abuse of
notation, we use RAi and RB
i to denote the ith critical region for each case. . 25
2.3 Optimal flow for the case with negative Hessian entries. . . . . . . . . . . . . 26
2.4 Box plots of price and load data: (a) locational marginal price, and (b) load. 33
2.5 Average run-time comparison between the greedy algorithm and the MIQP-
based method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1 Percentage cost savings of a storage network operated for balancing. . . . . . 50
3.2 Bar plots for scaled hourly total load (upper panel) and wind data (lower
panel) used for the simulation. . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3 Convergence of ADMM and centralized subgradient method. Here ζk is the
step size of the subgradient algorithm at the kth iteration. . . . . . . . . . . . 52
3.4 Running time of distributed and centralized ADMM . . . . . . . . . . . . . . 53
4.1 Conceptual diagram for the trading process. . . . . . . . . . . . . . . . . . . . 61
4.2 Network diagram for the two-bus example. . . . . . . . . . . . . . . . . . . . . 72
xi

Chapter 1
Introduction
1

CHAPTER 1. INTRODUCTION 2
1.1 The Rise of Distributed Energy Resources
The architecture of today’s electric power grid is largely based on a top-down design: elec-
tricity flows from centralized generation through high voltage transmission system and then
medium and low voltage distribution networks to end users. This architecture is about
100 years old and goes back to the times of Tesla and Edison [133]. In the 21st century,
this paradigm is challenged due to a number of environmental, economic and policy trends,
which lead to the rise of distributed energy resources (DERs). Distributed energy resources,
in contrast to centralized energy resources, are energy resources that are scattered around
the grid. Common examples of DERs include distributed generation such as roof-top solar
generation, distributed energy storage, and demand management programs or technologies
such as those implemented by demand response aggregators [87]. In the rest of this section,
we examine the drivers for DERs and then briefly discuss challenges brought about by deep
penetration of DERs .
1.1.1 Drivers and Trends for DERs
The widening environmental concerns on greenhouse gas emissions, decreasing costs of
DERs, and favorable policies implemented in many countries and regions across the world
are major drivers for DERs.
Environmental Drivers
Centralized generation in the United States and many other countries is mainly based on
fossil fuels such as coal and nature gas. Such generation sources are often economical and
reliable, but produce greenhouse gases as byproducts of electricity. As combating global
warming becomes a wide-spread interest, alternative generation sources that have smaller
carbon footprints are receiving increasing amount of attention. In particular, renewable
generation sources such as wind and solar are considered as the primary candidates for
decarbonizing the electric grid [51]. In fact, solar power and wind power presented the
largest source and the third-largest source of U.S. electric-generating capacity additions in
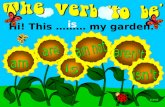
2016, constituting 38% and 27% of all U.S. capacity additions, respectively [130]. Figure 1.1
depicts the relative contribution of generation types in annual capacity additions from year
1998 to year 2016 [130]. A large portion of the installed renewable generation capacities is
in the form of distributed generation.
These renewable generation sources are intermittent and uncontrollable, and have limited
availability during certain times of the day. Integrating these variable generation sources
presents a major challenge to the electric power grids, which typically are not designed to
handle variable generation sources. Issues arise from the need to align supply and demand
in order to avoid curtailing energy generated from renewable sources in a way that maintains
the reliability of the power grid in every time instance [127]. DERs like energy storage and

CHAPTER 1. INTRODUCTION 3
1998 2000 2002 2004 2006 2008 2010 2012 2014 2016Year
0
10
20
30
40
50
60
70
80
Ann
ual c
apac
ity a
dditi
ons
(GW
)Other non-renewableCoalGasOther renewableSolarWind
Figure 1.1: Generation types in U.S. annual capacity additions
demand management tools are well-suited to smoothing the variable generation from wind
and solar, so that energy supply can be shifted to be better aligned with demand.
Economic Drivers
Mass adoption of distributed generation and storage is not possible without the declining
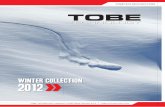
costs for these technologies. Figure 1.2 depicts the cost trends of distributed solar generation
for various types of solar installation projects in the U.S. [8]. It is demonstrated that the
median installed prices fell by about $0.5/W per year on average for the last 16 years. This
represents an average annual percentage reduction of 7% per year for residential and small
non-residential systems (i.e., systems with DC capacity smaller than 500 kW), and 11% for
large non-residential systems (i.e., systems with DC capacity larger than 500 kW). Even
faster cost reduction is observed for utility scale solar systems (i.e., systems with capacity
larger than 5 MW) [16].
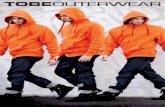
Energy storage costs are also declining in the recent years. The cost of Lithium-Ion
battery has declined by more than 60% since 2012. Figure 1.3 shows the price trends
of Lithium-Ion battery where only the prices for battery cells and packs are considered
[31]. The installed prices for Lithium-Ion battery systems tend to be higher due to other
hardware costs (e.g., inverter costs) and soft costs (e.g., installation costs). Comparing the
battery only prices reported in Figure 1.3 and California’s 2017 Self-Generation Incentive
Program (SGIP) statewide data suggests that the installed prices for Lithium-Ion battery
based storage system can be $650/kWh higher [1]. Nevertheless, given the steadily reducing
inverter costs and other soft costs, the overall costs for Lithium-Ion battery based energy

CHAPTER 1. INTRODUCTION 4
2000 2002 2004 2006 2008 2010 2012 2014 2016Year
0
2
4
6
8
10
12
14
Med
ian
inst
alle
d pr
ice
($/W
) ResidentialSmall non-residentialLarge non-residential
Figure 1.2: Installed price trends of distributed solar generation in the U.S.
storage system has been on a rapid reduction trend. Similar cost reductions trends have
also been observed or anticipated for other storage technologies [37, 107].
2010 2011 2012 2013 2014 2015 2016Year
0
200
400
600
800
1000
Lith
ium
-Ion
bat
tery
pric
e ($
/kW
h)
Figure 1.3: Price trends of Lithium-Ion battery (cell and pack only)
Policy Drivers
Given the environmental concerns, governments around the world have put forward plans
and/or legislation to reduce carbon emissions. The international Energy Agency estimates
that $13.5 trillion in additional investment will be needed to achieve the carbon reduction
goal set by the 2015 Paris agreement. It is expected that a part of such investment will
happen through the renewable energy industry, possibly stimulated by government mandates
or incentive programs.
For distributed solar, financial incentives provided through utility, state, and federal pro-
grams have been a driving force for photovoltaic (PV) markets in the United States. These
incentives typically include some combinations of cash incentives (rebate or performance-
based incentives) provided by state/utility’s PV program, federal/state investment tax cred-
its, and retail net metering programs. At their peak, these incentive programs have resulted
in savings for PV owners of $4-8/W [8]. These incentives are in the process of being phased

CHAPTER 1. INTRODUCTION 5
out in markets such as Arizona and California. Such reduction in cash incentives has to
some extent offset the reduction in the installed prices for distributed solar generation.
For energy storage, several states in the U.S. have established mandates or incentive
programs [1]. For instance, through legislation AB 2514, California requires the state’s three
investor owned utilities to procure 1.3 GW of energy storage by 2020. In 2016, Massachusetts
passed a law (H.4568) to direct the Massachusetts Department of Energy Resources (DOER)
to assess whether to set appropriate targets for energy storage procurements. As a result,
DOER has set an aspirational target of deploying 200 MWh of storage by 2020. Examples of
storage incentive programs include California’s SGIP program through 2020 and Maryland’s
30% tax credit for energy storage systems.
1.1.2 Challenges in DER Integration
The aforementioned drivers for DERs have resulted in a significant increase in DER pene-
trations in the electric power grid. This has led to many challenges in the planning, control
and market operation of the power grid as DERs differ from traditional centralized fossil
fuel based generation in two fundamental aspects. The first is that as DERs are scattered
around the power network, the interaction between the DERs and the power network be-
comes an important element to consider. The second is that as many distributed generation
sources are uncontrollable and intermittent renewable generation sources, it is important
to model them as stochastic resources. Incorporating these two aspects calls for a major
rethinking in the way that many power system studies are conducted, as a majority of the
prior studies ignore one or all of these aspects. In this thesis, we study three problems and
their solutions when the power network and uncertainty from DERs are both considered.
1.2 Outline and Contributions
1.2.1 Chapter 2: Planning of Energy Storage
Power system planning studies are the process of determining the capacities and locations to
build different types of energy resources, in order to fulfill the future load for the planning
horizon (ranging from a few years to 10 years). In Chapter 2, we consider the planning
problem of placing energy storage in power networks when all storage devices are optimally
controlled to minimize system-wide operation costs. We propose a discrete optimization
framework to accurately model heterogeneous storage capital and installation costs as these
fixed costs account for the largest cost component in most grid-scale storage projects. Iden-
tifying an optimal placement strategy is challenging due to (i) the combinatorial nature of
such placement problems, and (ii) the spatial and temporal transfer of energy via transmis-
sion lines and distributed storage devices. To develop a scalable near-optimal placement
strategy with a performance guarantee, we characterize a tight condition under which the

CHAPTER 1. INTRODUCTION 6
placement value function is submodular by exploiting our duality-based analytical charac-
terization of the optimal cost and prices. The proposed polyhedral analysis of a parametric
economic dispatch problem with optimal storage control also suggests a simple but rigorous
verification method for submodularity, and a novel insight that the spatio-temporal conges-
tion pattern of a power network is critical to submodularity. A modified greedy algorithm
provides a (1 − 1/e)-optimal placement solution and can be extended to obtain risk-aware
placement strategies when submodularity is verified. The results of this chapter have been
reported in [103]. An empirical study based on an extension of the algorithm analyzed in
this chapter to settings with both storage and distributed solar generation is reported in
[52].
1.2.2 Chapter 3: Stochastic Control of Distributed Energy Storage
After the DERs are built, a natural question is to determine how to operate them optimally.
Chapter 3 studies the problem of optimal control of energy storage in power networks
in stochastic environments, which is an important open problem. The key challenge is
that, even in small networks, the corresponding constrained stochastic control problems
on continuous spaces suffer from curses of dimensionality, and are intractable in general
settings. For large networks, no efficient algorithm is known to give optimal or provably near-
optimal performance for this problem. This chapter provides an efficient algorithm to solve
this problem with performance guarantees. We study the operation of storage networks,
i.e., a storage system interconnected via a power network. An online algorithm, termed
Online Modified Greedy algorithm, is developed for the corresponding constrained stochastic
control problem. A sub-optimality bound for the algorithm is derived, and a semidefinite
program is constructed to minimize the bound. In many cases, the bound approaches zero
so that the algorithm is near-optimal. A task-based distributed implementation of the
online algorithm relying only on local information and neighborhood communication is then
developed based on the alternating direction method of multipliers. Numerical examples
verify the established theoretical performance bounds, and demonstrate the scalability of
the algorithm. The results of this chapter have been reported in [96].
1.2.3 Chapter 4: Flexible Market for Smart Grid
As many DERs are owned and operated by individual users, we may need a market to
coordinate the benefits and needs of these users while ensuring the reliability of the power
network. In Chapter 4, a coordinated trading process is proposed as a design for an electric-
ity market with significant uncertainty, perhaps from renewables. In this process, groups of
agents propose to the system operator (SO) a contingent buy and sell trade that is balanced,
i.e.the sum of demand bids and the sum of supply bids are equal. The SO accepts the pro-
posed trade if no network constraint is violated or curtails it until no violation occurs. Each

CHAPTER 1. INTRODUCTION 7
proposed trade is accepted or curtailed as it is presented. The SO also provides guidance
to help future proposed trades meet network constraints. The SO does not set prices, and
there is no requirement that different trades occur simultaneously or clear at uniform prices.
Indeed, there is no price-setting mechanism. However, if participants exploit opportunities
for gain, the trading process will lead to an efficient allocation of energy and to the discovery
of locational marginal prices (LMPs). The great flexibility in the proposed trading process
and the low communication and control burden on the SO may make the process suitable
for coordinating producers and consumers in the distribution system. The results of this
section have been reported in [99].

Chapter 2
Planning of Energy Storage
8

CHAPTER 2. PLANNING OF ENERGY STORAGE 9
2.1 Introduction
Energy storage devices, ranging from batteries to hydropower plants, are considered to play
a key role in improving the reliability, efficiency and resilience of power systems. A strong
growth of energy storage installation has occurred around the world in recent years. For
example, the total storage deployment in the United States increased by 243% in power
capacity and 188% in energy capacity during 2014-2015 [42]. This was driven, in part,
by an increasing need for energy storage in modern power systems to compensate for the
variability of wind and solar energy sources. The value of storage in the power grid under
a large penetration of renewable energy sources has been quantified in several studies (e.g.,
[26, 92, 102]). It has also been claimed that energy storage can be used to shift load and
support frequency regulation to enhance system efficiency and reliability [54, 80]. Another
primary driving force has been the rapidly decreasing cost of storage devices, especially
batteries, as a consequence of growing public and commercial interest in electric vehicles [88].
The bulk of newly deployed storage devices has been front-of-meter deployment. In
2015, 85% of storage deployment in the United States was front-of-meter utility- or grid-
scale storage [79]. The value of such grid-scale storage depends critically on the location at
which it is installed due to the geographical heterogeneity of generation and load profiles and
the possibility of network congestion [19, 23]. Therefore, there is a strong need for efficient
strategies to place storage devices in power networks.
2.1.1 Related Work
A majority of prior studies have considered the energy storage placement problem as the
problem of sizing storage. This line of research has led to continuous optimization formula-
tions. For example, Thrampoulidis et al. [119] studied the allocation of a fixed total storage
capacity over a network to minimize the generation cost. By optimizing the capacity of each
storage device together with the decision variables in economic dispatch, they obtained a
structural characterization of the optimal allocation. This characterization eliminated the
need to place storage at certain generation-only buses. Pandzic et al. [91] and Wogrin and
Gayme [131] emphasized the multi-level nature of the placement problem. Their analyses
also provided useful insights on the effect of congestion, wind penetration and storage ser-
vice types. Sjodin et al. [110] employed chance constraints to limit the system operation
risk generated by variable renewable energy sources and jointly optimized generator dis-
patch and storage control and sizing. Kraining et al. [61] extended their convex model
predictive control based storage operation optimization to address the problem of allocat-
ing storage capacities over the network. Qin and Rajagopal [102] derived a constrained
linear-quadratic-Gaussian controller for distributed storage devices under uncertainty and
formulated a storage-sizing problem as a convex program. These studies all used linearal-
ized DC approximation of AC power flow in recognition of the complexity of the AC power

CHAPTER 2. PLANNING OF ENERGY STORAGE 10
flow model. Castillo and Gayme [24] studied the storage allocation problem with line losses
considered. This led to a non-convex quadratic constrained quadratic program for which
exact convex relaxations based on semidefinite programs and second order cone programs
were developed. Bose et al. [20] developed a semidefinite relaxation approach to the
storage placement problem using the AC power flow model and demonstrated its effective-
ness through numerical simulations. With an AC power flow model, Castillo and Gayme
[25] considered the setup where storage is operated to maximize profit based on locational
marginal prices (LMPs) in the power network. Structural results between the storage deci-
sions and the LMPs were derived. Tang and Low [117] focused on distribution networks
by employing a branch flow model and derived the monotonicity properties of the optimal
placement solution under the assumption that all load profiles have the same shape.
Another line of research treats the energy storage placement problem as a form of fa-
cility location problem (cf. [109] and references therein). An example is Qi et al. [94],
which considers a planning problem for energy storage and transmission in the presence of
wind energy generation. Utilizing a simplified model for power flow, the authors formu-
late a mixed-integer second order conic program for uncapacitated storage and propose an
approximation scheme for capacitated storage.
Outside of energy storage placement, the concept of submodularity and optimization
techniques exploiting submodularity have been used in a number of power system applica-
tions. See [65], [67] and references therein.
2.1.2 Proposed Work and Its Contributions
Departing from the aforementioned continuous optimization approaches, we propose a dis-
crete optimization formulation for energy storage placement when all of the storage devices
are optimally controlled to minimize the total system-wide cost. This formulation is moti-
vated by the cost structure of storage deployment. The operating and maintenance costs
of storage are usually negligible compared to the fixed costs, which include installation and
capital costs. Depending on the storage technology used, the installation costs can be as
high as the capital costs. Therefore, the cost of deploying ten units of 1 MWh battery could
be dramatically different from the cost of deploying one unit of 10 MWh battery due to
differences in installation costs. Furthermore, additional fixed cost components, such as site
acquisition costs, could be sensitive to the installation location. Due to the discrete nature
of these heterogeneous cost factors, it is difficult to take into account all of them using a con-
tinuous optimization framework. However, discrete optimization with a budget constraint
limiting the total fixed cost offers a natural and accurate model of considering these cost
factors. Additionally, a discrete optimization framework is useful when handling practical
scenarios in which fixed-capacity storage devices are to be placed. These advantages are
elaborated in Section 2.2.5.

CHAPTER 2. PLANNING OF ENERGY STORAGE 11
We formulate the placement problem as a maximization of the placement value func-
tion, a set function that represents the value of a storage placement decision, subject to a
knapsack constraint that models the budget constraint on the aforementioned fixed costs.
Unfortunately, this class of problems is NP-hard in general. To overcome this challenge,
we identify rich structures of the placement value function. In particular, we characterize
conditions under which the placement value function is submodular, suggesting that the
marginal benefit of adding a storage device decreases as more devices are installed. This
submodular structure allows us to employ a greedy algorithm that provides a near-optimal
solution with a provable suboptimality bound [55,85]. The submodularity of energy storage
placement is not unexpectable but characterizing conditions the under which it holds has
been recognized, e.g., in [35], as an unanswered question.
We summarize the contributions and main results of the proposed work as follows. First,
we provide a novel discrete optimization approach to energy storage placement that allows an
accurate modeling of fixed costs for storage deployment. Second, by analyzing an associated
multi-period economic dispatch problem with optimal storage control and its dual problem,
we analytically characterize several structural properties of the optimal system-wide cost,
energy prices and storage controls. In particular, we derive locational marginal prices and
network congestion prices as piecewise affine functions of the installed storage capacity
vector and a closed-form expression of the Hessian of the optimal objective function. Third,
exploiting these structural properties, we show that the submodularity of the placement
value function is not guaranteed (P 6= Psm in Fig. 2.1), although such situations are unlikely
to occur in practice. This examination provides a unique insight into the effect of spatio-
temporal (or network-storage) congestion patterns on submodularity, whereas such an effect
is not observed in other applications such as sensor placement [63,64] and actuator placement
[30, 90, 114, 122]. Fourth, by connecting the sign of Hessian entries to the submodularity of
the storage placement value function, we identify a tight condition under which the value
function is submodular through a polyhedral characterization of critical regions. Based on
this polyhedral analysis, we develop an efficient and rigorous computational procedure to
verify submodularity (i.e., testing whether a particular problem instance belongs to set Psm
in Fig. 2.1). Fifth, motivating by the fact that the total storage deployment over the network
is still small compared to the total hourly average load or generation, we define a small
storage condition (set Pss in Fig. 2.1) under which the verification procedure terminates in
one step. The small storage condition can be tested with the problem data via solving a
simple linear program. An extension to risk-aware placement strategies is also discussed for
cases with deep penetration of wind and solar energy sources.
2.1.3 Organization
The remainder of this chapter is organized as follows. In Section 2.2, we introduce a prob-
lem of jointly optimizing storage placement and control in a power network, and propose a

CHAPTER 2. PLANNING OF ENERGY STORAGE 12
All problem instances (P)
Submodular
(Psm)
Small storage
(Pss)
Figure 2.1: Venn diagram for the set of all possible storage placement problem instances.
discrete optimization formulation. Section 2.3 contains several structural properties of the
optimal cost function and prices. In Section 2.4, we provide a computational tool to verify
the submodularity of the placement value function based on the identified structural prop-
erties and a polyhedral analysis. We demonstrate the effectiveness of the proposed approach
in Section 2.5.
2.2 Problem Formulation
2.2.1 Notation
For a transmission network with N buses and L lines, we use n ∈ N , 1, . . . , N to index
the buses, and ℓ ∈ L , 1, . . . , L to index the lines. We also use t ∈ T , 1, . . . , T to
index the time periods. For a matrix x ∈ RN×T with any given positive integers N and T ,
we use xn,t to denote its (n, t)-th entry, xt , (x1,t, · · · , xN,t)⊤ ∈ RN×1 to denote its tth
column, and x⊤n , (xn,1, · · · , xn,T ) ∈ R1×T to denote its nth row. For any real number z,
we use (z)+ , max(z, 0) to denote the positive part of z and (z)− , −min(z, 0) to denote
the negative part of z so that z = (z)+ − (z)−. For any Euclidean vector space RN , we use
1 ∈ RN to denote the all-one vector and 1k ∈ RN to denote the kth elementary vector, i.e.,
the vector with all zeros except for its kth element which is 1.
2.2.2 Power Flow Model
We begin by considering a connected power transmission network with N buses and L lines
operated over a finite horizon of T time periods. As common practice in the planning
studies, we use the classical linearized DC approximation to the steady-state AC power flow
[112], so that the power flow constraints can be compactly expressed as
1⊤pt = 0, (2.1a)
Hpt ≤ f , (2.1b)

CHAPTER 2. PLANNING OF ENERGY STORAGE 13
for power injection pt ∈ RN , t ∈ T . Equation (2.1a) enforces net power balance in the
network, while (2.1b) limits the line flows induced by the power injection vector pt within
the line capacities f . The matrix H , which models the linear mapping from the nodal
injections to the line flows, is commonly referred to as the shift-factor matrix. Appendix A.1
provides a derivation of the structure of matrix H , relating it to matrices representing the
graph structure of the power network.
2.2.3 Energy Storage
We consider a stylized model of energy storage:1 for each bus n, the storage’s state of charge
(SOC) sn,t evolves as
sn,t+1 = sn,t − un,t, t = 1, . . . , T − 1, (2.2)
where un,t is the amount of energy discharged (if un,t > 0) or charged (if un,t < 0) in time
period t. The initial state of charge is assumed to be sn,1 = 0. Given the storage capacity
xn ≥ 0, the following constraints model the energy limit of the storage device:
0 ≤ sn,t ≤ xn, t ∈ T . (2.3)
Note that xn = 0 if there is no storage connected to bus n. Applying (2.2) recursively, we
can express constraint (2.3) as
0 ≤t∑
τ=1
−un,τ ≤ xn, t ∈ T ,
which can be compactly expressed in the following vector form:
0 ≤ Eun ≤ xn1,
where un ∈ RT is the vector of storage control over T periods, and E ∈ RT×T is a lower
triangular matrix with entries Eij = −1 for i ≥ j. In other words, the information about
the storage dynamics is embedded in the matrix E.
2.2.4 Economic Dispatch with Optimal Storage Control
The economic dispatch problem aims to identify an efficient generator dispatch to serve the
net demand, which is defined as load minus uncontrollable (renewable) generation. Let
the net demand for time t ∈ T be denoted by dt ∈ RN . When there are storage devices
connected to the network, a careful operation of storage could reduce the total generation
cost by moving energy across time periods. This can be achieved by linking T -single period
1Our analysis and results can be extended using a more detailed storage model with charging efficiencyand SOC decay. For the sake of simplicity, we use the idealized model.

CHAPTER 2. PLANNING OF ENERGY STORAGE 14
economic dispatch problems, which results in the following multi-period economic dispatch
problem with storage dynamics :
J(x) , ming,u
T∑
t=1
Ct(gt) (2.4a)
s.t. βt : H(gt + ut − dt) ≤ f , t ∈ T , (2.4b)
γt : 1⊤(gt + ut − dt) = 0, t ∈ T , (2.4c)
µn : Eun ≤ xn1, n ∈ N , (2.4d)
νn : Eun ≥ 0, n ∈ N . (2.4e)
Here, gt ∈ RN is the vector of controllable power generation for each time period t ∈ T ,Ct(gt) ,
∑n∈N Cn,t(gn,t) is the system-wide cost for time period t and is taken to be
quadratic as is common in the literature [132], i.e.,
Ct(gt) ,1
2g⊤t Qtgt + r⊤t gt, t ∈ T ,
where Qt is a diagonal matrix whose diagonal entries are positive, which models the in-
creasing incremental (marginal) heat rate2, and rt ∈ RN is the linear cost coefficient for
generators over the network. The cost function mainly models the fuel cost of generating
gn,t MW of real power. The constraints (2.4b) and (2.4c) enforce power flow constraints (2.1)
with the nodal power injection pt = gt + ut − dt for each period t. The storage dynamics
and energy limit constraints are captured by (2.4d) and (2.4e). At buses with no storage
connection, we set xn = 0, and (2.4d) and (2.4e) reduce to un,t = 0 for all t ∈ T . Note
that we can obtain an optimal storage control schedule as well as an optimal generator dis-
patch schedule by solving the multi-period economic dispatch problem. The optimal value
of the multi-period economic dispatch problem, denoted by J , is a function of storage capac-
ities over the network x, as storage capacities affect the feasible region of the optimization
problem (2.4) via constraint (2.4d).
2.2.5 Storage Placement as Combinatorial Optimization
The optimal cost of this multi-period economic dispatch problem depends critically on the
storage capacity vector x ∈ RN over the network. If there is no storage connected to the
network (i.e., x = 0), the optimal cost of this multi-period problem reduces to the sum
of the optimal costs of T single-period economic dispatch problems. Conversely, if the
storage and line capacities are large enough for every node, the system cost for T periods
approaches a limit where, roughly speaking, the cheapest generators across the network and
2Heat rate is the unit amount of heat contained in fuel needed to produce one unit MW of power output.For each generator with a fixed type of fuel supply, an increasing marginal heat rate implies an increasingmarginal cost with a given fuel price.

CHAPTER 2. PLANNING OF ENERGY STORAGE 15
over T periods are used. In this ideal case, marginal generation costs for all time periods are
equalized. When only a finite budget is available for installing storage devices, the location
at which a storage device is installed could have a large impact on its contribution to the
cost reduction due to line congestions that could isolate the benefits of storage.
In particular, given K different types of storage devices, each with some storage capacity
xk and capital and installation costs ck, k = 1, . . . ,K, we want to place the storage devices to
minimize the system operation cost with a total budget of b for total capital and installation
costs.
We proceed to formulate the placement problem as a combinatorial optimization prob-
lem. Consider the collection of all N ×K (bus, storage “type”) pairs3
Ω , (n, k) : n = 1, . . . , N, k = 1, . . . ,K.
Each subset X of Ω represents a valid placement decision, and all placement decisions can
be represented by a subset of Ω if we assume that only one storage device with each type
can be placed at each bus. For notational convenience, let I : 2Ω → 0, 1N×K be a set
indicator function such that In,k(X) , 0 if (n, k) /∈ X and In,k(X) , 1 if (n, k) ∈ X . Note
that the nth entry of the matrix-vector product I(X)x can be expressed as
(I(X)x)n =∑
k:(n,k)∈X
xk, (2.5)
which is equal to the total storage capacity at bus n. We now introduce a function, V :
2Ω → R, which we call the storage placement value function, defined as
V (X) , J(I(∅)x)− J(I(X)x).
For each placement decision X , the value V (X) represents the reduction in the minimum
T -period total generation cost caused by the optimal control of the storage devices given
the storage capacities induced by the (bus, storage type) pairs contained in X . The value
function V is normalized such that V (∅) = 0. An optimal placement solution can be obtained
by solving the following discrete optimization problem of maximizing the placement value
function:
maxX⊆Ω
V (X) (2.6a)
s.t.∑
k:(n,k)∈X
ck ≤ b. (2.6b)
3It can be the case that some buses should be ruled out a priori for certain systems. In this case, wecan define the set of possible storage placement decisions as Ω = (n, k) : n ∈ N , k = 1, . . . , K, whereN ⊆ 1, . . . , N is the set of buses where placing a storage is possible.

CHAPTER 2. PLANNING OF ENERGY STORAGE 16
We claim that our problem formulation as a discrete optimization, has practical advan-
tages over continuous optimization formulations. First, our framework can handle practical
scenarios in which fixed-capacity storage devices are to be placed. Existing continuous
optimization formulations are valid under a strong assumption that the System Operator
can optimize the storage capacity at each bus. One can perform a post-processing, such
as thresholding, to convert the solutions of continuous optimization problems into discrete
solutions. However, such post-processing does not provide a performance guarantee in gen-
eral, whereas our method directly computes a discrete solution with a provable suboptimality
bound. Second, our problem formulation naturally incorporates storage devices’ capital and
installation costs through the knapsack constraint (2.6b), which accurately captures the to-
tal sum of the capital and installation costs as∑
k:(n,k)∈X ck and limits it by the budget
b. In contrast, it is difficult to expect such a precise regulation in continuous optimiza-
tion formulations as discussed in Section 2.1.2. Lastly, the proposed discrete optimization
formulation yields a very simple placement algorithm that only requires an input-output
(blackbox) model of a power system. Specifically, our greedy algorithm can use simulations
that capture electricity market input-output without using detailed information about the
network. This is a notable advantage over continuous optimization formulations, which often
require a full network model with complete information (e.g., parameters) about markets
to calculate the (sub)gradients of objective functions.
2.2.6 Outline of Proposed Analyses
We summarize the analyses conducted in this chapter as follows:
1. We characterize optimal locational marginal prices as affine functions of the storage
capacity x by examining the spatio-temporal (or network-storage) congestion patterns
of a power network via a dual quadratic program (Theorem 2.1).
2. Using the results of our dual analysis, we identify a closed-form expression of the
Hessian ∇2xxJ of the optimal cost function in each critical region (Theorem 2.2).
3. We connect the Hessian ∇2xxJ and the submodularity of the storage placement value
function V (Theorem 2.3). We also provide an insightful case in which V is not
submodular, although such a case is unlikely to occur in practice.
4. We investigate a polyhedral characterization of each critical region where the Hessian
∇2xxJ is invariant. We show that the spatio-temporal congestion pattern of a power
network defines the critical regions (Theorem 2.4).
5. The polyhedral characterization is then used to develop a computational tool for ver-
ifying the submodularity of V .
In Steps 1 and 2, we parametrize the multi-period economic dispatch problem with the
vector x of storage capacity by relaxing its domain as RN . Step 3 plays an important role in

CHAPTER 2. PLANNING OF ENERGY STORAGE 17
connecting our analysis in the continuous domain to the discrete notion of submodularity. In
Step 4, the spatio-temporal congestion pattern of a power network is identified as an essential
factor that affects the submodularity of V . Verifying its submodularity via the method
proposed in Step 5, we are able to find a near-optimal solution with a provable suboptimality
bound via the polynomial-time modified greedy algorithm illustrated in Section 2.4.3.
2.3 Structures of Optimal Cost and Prices
2.3.1 Dual Analysis
In order to obtain efficient methods to solve the storage placement problem (2.6), which
is NP-hard, we establish the structural properties of the placement value function through
an analytical characterization of the optimal prices, i.e., the solution to the dual program
of (2.4).
Consider the standard dual quadratic program (QP) of (2.4):
maxλ,γ,β,µ,ν
φ(λ, γ, β, µ, ν) (2.7a)
s.t. λt = γt1−H⊤βt, t ∈ T , (2.7b)
λn = E⊤(µn − νn), n ∈ N , (2.7c)
β, µ, ν ≥ 0, (2.7d)
where the Lagrange dual function is given by
φ(λ, γ, β, µ, ν) ,
T∑
t=1
−1
2(λt − rt)⊤Q−1
t (λt − rt) + d⊤t λt − f⊤βt − x⊤µt.
Note that the variable λn,t represents the locational marginal price (LMP) at bus n in period
t since from the first order optimality condition of (2.4) we have
∇gtCt(gt) = λt, t ∈ T .
A more detailed derivation can be found in [73, 78].
Remark 2.1 (Economic interpretation). According to the spot pricing theory, the generator
(load) at each bus n of the network is paid (charged) at the locational marginal price at the
bus, i.e., λn,t. Therefore for each period t, regrouping terms in the dual objective function

CHAPTER 2. PLANNING OF ENERGY STORAGE 18
reveals the economic meaning of each term:
φ(λ, γ, β, µ, ν) =
T∑
t=1
Ct(g⋆t (λt))︸ ︷︷ ︸
generator cost
+ λ⊤t dt︸ ︷︷ ︸load payment
− λ⊤t g⋆t (λt)︸ ︷︷ ︸
generator payment
− β⊤t f︸︷︷︸
line congestion charge
− µ⊤t x︸︷︷︸
storage congestion charge
.
Strong duality implies that we have
T∑
t=1
λ⋆⊤t dt − λ⋆⊤t g⋆t (λ⋆t ) =
T∑
t=1
β⋆⊤t f + µ⋆⊤
t x (2.8)
at the optimal solution (g⋆, u⋆, λ⋆, γ⋆, β⋆, µ⋆, ν⋆).4 The term on the left is the total amount
collected from the load less the total amount paid to the generator, which is often referred
to as the merchandising surplus of the system operator [135]. The terms on the right can
be interpreted as a form of economic rent paid to the owners of the transmission lines
(according to physical or financial transmission rights [48]) and storage devices.5 Thus,
(2.8) implies that the merchandising surplus of the system operator matches the total rent
paid to the transmission line and storage owners. This is a generalization of the result that
merchandising surplus is equal to the congestion rent when there is no storage in the network
[135].
We also note that β⋆t and µ⋆
t can be interpreted as the congestion prices for the trans-
mission lines and storage devices, respectively. If we treat the primal optimal value J as a
function parameterized by line capacity ℓ and storage capacity x, these dual variables are the
standard marginal values of increased line capacity and storage capacity ( cf. [135] for the
first identity and Theorem 2.2 for the second identity):
∇fJ = −T∑
t=1
β⋆t and ∇xJ = −
T∑
t=1
µ⋆t . (2.9)
The standard dual QP (2.7) can be further simplified. Observe that (2.4d) and (2.4e),
representing the lower and upper limits of state of charge, respectively, cannot bind simulta-
neously for any storage n and time period t. In other words, if the storage device connected
to bus n is empty in period t, i.e., sn,t = (Eun)t = 0, then it must be the case that
sn,t = (Eun)t < xn. Similarly, (Eun)t = xn signifies that (Eun)t > 0. By complementary
slackness, this implies that µn,tνn,t = 0 for all i and t, that is, at most one of µn,t and νn,t
can be positive at the optimal solution. Combining this with constraint (2.7c), which is
4By Slater’s condition, which is satisfied here because all constraints are linear and the domain of theobjective function is open, strong duality holds.
5Storage congestion charges are not common in current power system markets given the limited amountof storage connected to the system, but it has been proposed in recent studies [78, 118].

CHAPTER 2. PLANNING OF ENERGY STORAGE 19
equivalent to (µn − νn) = E−⊤λn, we have
µn = (E−⊤λn)+ and νn = (E−⊤λn)
− ∀n ∈ N .
We can verify that, given the structure of matrix E, a more explicit display of the previous
relation is
µt = (λt+1 − λt)+ and νt = (λt+1 − λt)− ∀t ∈ T , (2.10)
where we define λT+1 , 0 ∈ RN for convenience. That is, the storage congestion price µn,t
is nonzero only when the LMP λn ramps up in the next time period, where its value equals
the LMP increment.
Substituting the expression of µt into the dual QP, we obtain the following reduced dual
program:
maxλ,γ,β
φ(λ, β) (2.11a)
s.t. λt = γt1−H⊤βt, t ∈ T , (2.11b)
β ≥ 0, (2.11c)
where φ is a piecewise quadratic function defined as
φ(λ, β) ,
T∑
t=1
−1
2(λt − rt)⊤Q−1
t (λt − rt) + d⊤t λt − f⊤βt − x⊤(λt+1 − λt)+.
By strong duality, we can characterize the function J(x) via a sensitivity analysis of the
primal-dual pair (2.4) and (2.11). Let (g⋆(x), u⋆(x), λ⋆(x), γ⋆(x), β⋆(x)) be a pair of primal
and dual solutions to (2.4) and (2.11) for a given capacity vector x. We focus on x values
which will induce nondegenerate solutions of (2.4). In particular, we assume the following
linear independence constraint qualification (LICQ) for the rest of this chapter.
Assumption 2.1 (Flow LICQ). For each t ∈ T , let Hnett be the collection of H’s rows
corresponding to the congested (oriented) lines for the flow induced by (g⋆t (x), u⋆t (x)), when
at least one congested line exists in period t.6 Then, Hnett is of full row rank for each t ∈ T .
We first show that the prices are uniquely defined in almost all practical scenarios:
Proposition 2.1 (Uniqueness of prices). For each fixed x ∈ Rn+, the optimal dual variables
λ⋆(x) and γ⋆(x) are unique. Furthermore, if Assumption 2.1 holds, then (λ⋆(x), γ⋆(x), β⋆(x))
is the unique solution to the dual problem (2.11).
Proof. See Appendix A.2.
In view of Proposition 2.1, for the rest of the chapter, we assume the constraint qual-
ification and take (λ⋆(x), γ⋆(x), β⋆(x)) as the unique dual solution. The following result
6The matrix Hnett is formally defined later in (2.14).

CHAPTER 2. PLANNING OF ENERGY STORAGE 20
characterizes the locational marginal value of storage via the optimal LMP:
Lemma 2.1 (First order sensitivity). The optimal cost function J(x) is continuously dif-
ferentiable and its gradient is given by
∇xJ(x) = −T∑
t=1
(λ⋆t+1(x)− λ⋆t (x)
)+, (2.12)
where λ⋆T+1(x) , 0. Consequently, the optimal cost function J(x) is nonincreasing in xn
for each n ∈ N .
Proof. See Appendix A.3.
Coined in Bose and Bitar [19], the term locational marginal value of storage is used to
refer to the quantity −∇xJ(x), which characterizes the benefit of placing storage at different
locations of the network when the size of storage is infinitesimal. They also obtain the
expression (2.12) for the case where the marginal cost of generation and marginal benefit of
consumption are both constants (i.e., the cost function is a piecewise linear function with two
pieces). In fact, the expression (2.12) holds for any smooth convex cost function under mild
regularity assumptions as in the standard sensitivity theorem of nonlinear programming.
When the cost function is nonlinear and the size of the storage to be placed is far
from infinitesimal, the first-order approximation of the value function using the gradient
formula (2.12) may not be accurate.7 We now proceed to obtain a finer characterization of
the optimal cost J(x) by investigating its higher order derivatives. An immediate observation
is that J(x) is convex in x:
Lemma 2.2. The optimal cost function J(x) is convex in x.
Proof. See Appendix A.4.
2.3.2 Optimal Prices and Second Order Sensitivity
Given that the objective function is quadratic, we expect the curvature (or second-order)
information summarized by the Hessian matrix ∇2xxJ(x) together with the gradient infor-
mation discussed in Lemma 2.1 would provide a sufficient characterization of the optimal
system-wide cost function J(x). This is confirmed by the following result:
Lemma 2.3. The optimal cost function J(x) is a piecewise quadratic function with a finite
number of pieces, each of which is defined on a polytope in Rn+. In each polytope where J(x)
is a quadratic function, the optimal LMP vector λ⋆(x) is affine in x.
Proof. This is a standard multi-parametric quadratic programming result. See e.g.[9].
7The first-order approximation can be used for storage placement. Utilizing it with the approximationalgorithm proposed in [138], we find a solution with 0.6–0.7-a posteriori suboptimality bound.

CHAPTER 2. PLANNING OF ENERGY STORAGE 21
Remark 2.2. The polytopes in Lemma 2.3 are referred to as critical regions in the litera-
ture of multi-parametric quadratic programming (e.g., [9,53]). In our context, each critical
region is defined as a set of x values such that the inequality constraints binding at the op-
timum remain unchanged. In a single-period economic dispatch problem, the set of binding
constraints conveys the network congestion pattern. When there are storage devices con-
nected to the system, the definition of critical regions also depends on whether the storage
constraints (2.4d) and (2.4e) bind at the optimum. See Theorem 2.4 for a detailed charac-
terization of the critical regions.
By considering each critical region, we can characterize the optimal LMPs based on the
network and storage congestion patterns at the optimum. For each (n, t) ∈ N × T , letzstn,t(x) = 1 if the constraint (Eun)t ≤ xn is binding at the optimum, zstn,t(x) = −1 if the
constraint (Eun)t ≥ 0 is binding at the optimum, and zstn,t(x) = 0 otherwise. In other
words, zst represents the storage congestion pattern. Under strict complementary slackness,
we use (2.10) to obtain
zstn,t , zstn,t(x) =
1, if λ⋆n,t+1(x)− λ⋆n,t(x) > 0,
−1, if λ⋆n,t+1(x)− λ⋆n,t(x) < 0,
0, otherwise.
(2.13)
We now let LCt ⊂ 1, . . . , 2L denote the set of transmission lines that are congested at the
solution in period t and Lt , |LCt | denote the number of congested lines. We define the
selection matrix znett ∈ RLt×2L as
(znett )i,j, (znett (x))i,j=
1, if the ith element in LCt is j,
0, otherwise,
for i = 1, . . . , Lt and j = 1, . . . , 2L, and the shift factor matrix for congested lines as
Hnett , znett H. (2.14)
Note that znett = 0 if all lines are uncongested in period t.
Theorem 2.1. In the critical region containing a given storage capacity vector x, where
the storage and network congestions are represented by zstt and znett , t ∈ T , the optimal
locational marginal prices are affine in x and can be expressed as
λ⋆t (x) =Wt(znet, zst)x+ λt(z
net, zst), t ∈ T , (2.15)
where Wt(znet, zst) and λt(z
net, zst) are defined in Appendix A.5.
Proof. See Appendix A.5.

CHAPTER 2. PLANNING OF ENERGY STORAGE 22
As a useful byproduct of Theorem 2.1, we can obtain closed-form expressions of the
(reference) energy price γ⋆t = 1⊤1 λ
⋆t and the congestion price β⋆
t with respect to the capacity
vector x.
Corollary 2.1. Under the setting of Theorem 2.1, γ⋆t (x) and β⋆t (x) are affine functions of
x in the given critical region and can be expressed as
γ⋆t (x) = 1⊤1
(Wt(z
net, zst)x+ λt(znet, zst)
), (2.16)
β⋆t (x) = znett
⊤Bt(z
net, zst)x+ βt(znet, zst), (2.17)
where Bt(znet, zst) and βt(z
net, zst) are defined in Appendix A.5.
Proof. See Appendix A.5.
The Hessian of the optimal cost function plays a critical role in studying the submodu-
larity of the storage placement value function as we see in Section 2.4. Using Theorem 2.1
and Lemma 2.1, we can obtain a structural characterization (and a closed form expression)
for the Hessian of J(x) as follows:
Theorem 2.2. The optimal cost function J(x) is twice differentiable almost everywhere
with respect to the Lebesgue measure on Rn+. Furthermore, storage capacities x and x′ that
share the same congestion pattern, i.e., znet(x) = znet(x′) = znet and zst(x) = zst(x′) = zst,
have the same Hessian, i.e., (if both ∇2xxJ(x) and ∇2
xxJ(x′) exist),
∇2xxJ(x) = ∇2
xxJ(x′)
with expression given in Appendix A.6.
Proof. See Appendix A.6.
2.4 Submodularity of Placement Value Function
Equipped with the structural properties of the optimal cost function J(x), we now char-
acterize the storage placement function V (X) defined in Section 2.2.5. Recall that the set
function V (X) models the reduction of the optimal operational cost by employing the place-
ment decision X , which is defined as a subset of Ω that contains all admissible (bus, storage
type) pairs. In particular, we characterize the conditions under which the value function
belongs to the class of submodular functions, one of the most tractable classes in discrete
optimization.
Definition 2.1 (Submodularity and monotonicity). For a finite set Ω, a set function F :
2Ω → R is said to be submodular if, for any X ⊆ Y ⊆ Ω and e ∈ Ω \ Y ,
F (X ∪ e)− F (X) ≥ F (Y ∪ e)− F (Y ). (2.18)

CHAPTER 2. PLANNING OF ENERGY STORAGE 23
The function is said to be monotonically nondecreasing if for any X ⊆ Ω and e ∈ Ω \X,
F (X ∪ e) ≥ F (X). (2.19)
In our case, (2.19) implies that the marginal benefit of installing a new storage device
is nonnegative and (2.18) states that this marginal benefit should diminish as more stor-
age devices are connected to the system. It is straightforward to check that any modular
function is submodular. Evidently, the nondecreasing property of V (X) follows from the
fact that J(x) is nonincreasing (Lemma 2.1). To check whether V (X) is submodular, it is
instrumental to consider an alternative characterization of submodularity based on discrete
derivatives defined for set functions.
Definition 2.2. For any set function F : 2Ω 7→ R, the discrete derivative of F in e ∈ Ω is
defined as
DeF (X) , F (X ∪ e)− F (X\e).
It is straightforward to check that the following lemma provides a necessary and sufficient
condition for submodularity [17].
Lemma 2.4. A set function F : 2Ω 7→ R is submodular if and only if
De (De′F (X)) ≤ 0, (2.20)
for all e, e′ ∈ Ω, e 6= e′ and X ⊆ Ω.
We relate the submodularity of V (X) to the sign of the Hessian entries of J(x) as follows:
Theorem 2.3 (Sufficient condition for submodularity). The storage placement value func-
tion V : 2Ω → R is submodular if
(∇2
xxJ(x))ij≥ 0, ∀i, j ∈ N ,
for all x ∈ X , [0, xmax]n, where xmax ,∑K
k=1 xk is the maximum storage capacity to be
achieved at each bus.
Proof. See Appendix A.7.
Theorem 2.3 provides a sufficient condition for the submodularity of V by just checking
the sign of the Hessian entries of the optimal cost function J(s), which can be computed
using Theorem 2.2. The characterization is tight in the following sense.
Corollary 2.2. If(∇2
xxJ(x))ij< 0 for some x ∈ Rn
+ and i, j ∈ N , then there exist a
storage capacity vector x ∈ Rn+ and a corresponding set, Ω, of (bus, storage type) pairs such
that V (X) is not submodular on 2Ω.

CHAPTER 2. PLANNING OF ENERGY STORAGE 24
This corollary is a partial converse of Theorem 2.3. Even when the point x that results
in negative Hessian entries is contained in X , the function V (X) could still be submodular
if the critical region with negative Hessian entries is relatively small (or the magnitude of
the negative Hessian entries is small) enough that its contribution to the discrete derivative
is outweighed by the contribution from other critical regions with positive Hessian entries.
Theorem 2.3 and Corollary 2.2 establish a strong connection between submodularity
of the storage value function V (X) and the sign of the Hessian entries of the optimal
cost function J(x). This allows us to understand the submodularity condition through an
economic interpretation of the Hessian entries:
Remark 2.3 (Submodularity and substitutability). Define a continuous version of the
storage value function as v(x) = J(0) − J(x). For any buses i, j ∈ N , the Hessian entry
(cross derivative) ∂2v(x)∂xj∂xi
= ∂∂xj
(∂v(x)∂xi
)is the rate of change of the locational marginal value
of storage at bus n when the storage capacity at bus j is changed. Thus, the condition in
Theorem 2.3 has the following economic interpretation:
• For i = j, storage at bus i has diminishing return;
• For i 6= j, storage at bus j substitutes storage at bus i.
The convexity of the optimal cost function J(x) (Lemma 2.2) establishes that the di-
agonal entries of the Hessian matrix ∇2xxJ(x) are always nonnegative. The conditions for
submodularity in Theorem 2.3 also require all off-diagonal entries of the Hessian matrix to
be nonnegative, which does not follow from properties that have already been established
for the optimal value function J(x).
2.4.1 Two-Bus Network
To gain insights into the sign of the off-diagonal entries of the Hessian matrix, we consider a
two-bus example with T = 3 together with synthetic load profiles. We demonstrate that for
the same network submodularity may hold for certain load profiles but fail to hold for certain
other load profiles. For simplicity, we use cost functions Ct(gt) =12g
⊤t gt, for t = 1, . . . , 3, i.e.,
Qt ≡ I ∈ R2×2 and rt ≡ 0. Given a time-varying demand profile over the network, if neither
storage nor line capacity is constraining, then the economic dispatch solution exhibits a form
of “water-filling” behavior where the optimal flows result in equalized generation from each
bus for all time periods. We also notice that g⋆t = λ⋆t for this cost function, by the first
order optimality condition of (2.4).
We now investigate the property of J(x) and the optimal primal and dual solutions
for the multi-period economic dispatch problem for all storage capacities x in the region
X = [0, 1]× [0, 1]. The line capacity is set to be 0.5. We consider the following two cases:
One is commonly observed in simulations where all of the critical regions inside of X have
J(x) with only nonnegative Hessian entries, and the other is specially designed so that one
of the critical regions has negative off-diagonal Hessian entries.

CHAPTER 2. PLANNING OF ENERGY STORAGE 25
• Case A: dA =
[1 2 0
1 2 2
];
• Case B: dB =
[1 2 1
3 2 3
].
The critical regions for these cases are depicted in Fig. 2.2. For each critical region, we
x1
x2
10
1
RA1
RA2
(a) Case A
x1
x2
10
1
( 12,1
2)
1
3
1
3
RB1
RB2
RB3
RB4
(b) Case B
Figure 2.2: Critical regions for the two-bus examples. In the figure with a slight abuse ofnotation, we use RA
i and RBi to denote the ith critical region for each case.
obtain the expression of the optimal cost function J(x). In addition, for a set of points on
the mesh grid inside of each critical region, we solve the multi-period economic dispatch
problem and obtain the optimal primal dual solution. In all 6 critical regions across these
two cases, only the red region in case B, i.e., RB1 , has negative Hessian entries. This suggests
that submodularity holds for load profile dA but fails to hold for load profile dB. Therefore,
submodularity does not hold in general. We focus on this region for the remainder of this
subsection. The optimal cost function in the critical region is
J(x) =1
2x⊤
[1.5 −0.5−0.5 1.5
]x+
[−0.5 −0.5
]x+ 12.5.
Consider a particular storage capacity vector x = [0.2, 0.2]⊤ ∈ RB1 . The solution of
(2.4) for this given storage capacity is depicted in Fig. 2.3 by exploiting the observation
that storage can be thought of as an inter-temporal link that sends energy into the future

CHAPTER 2. PLANNING OF ENERGY STORAGE 26
1, 1
2, 1
1, 2
2, 2
1, 3
2, 3
1.70
1.00
2.50
3.00
2.00
2.00
2.00
2.00
1.50
1.00
2.30
3.000.200.50 0.50
0.00
0.000.20
0.20
Figure 2.3: Optimal flow for the case with negative Hessian entries.
and that the multiperiod economic dispatch problem is a form of generalized network flow
problem on a time extended graph where storage edges connect the graph representations
of the power network for consecutive time periods [52, 137]. In Fig. 2.3, each node in the
graph represents a (bus, time period) pair. The vertical edges of the graph represent the
transmission line connecting the two buses, while the horizontal edges represent the power
stored for future use by each storage device. Around each node (n, t), the value associated
with an “inflow arrow” is the generation g⋆n,t, and the value associated with an “outflow
arrow” is the demand dn,t. The value on each vertical edge is the optimal flow sent through
the line; for each horizontal storage edge, the value on it represents the amount of energy
stored at the end of last time period. Red edges are congested at the optimal solution.
A key observation for this special case can be made: Given the load and network conges-
tion pattern, the usage of storage links are through the following spatial-temporal flow path
(1, 1)→ (1, 2)→ (2, 2)→ (2, 3). In this flow path, the storage capacity at bus 1 and storage
capacity at bus 2 complements, instead of substitutes (cf. Theorem 2.3 and Remark 2.3)
each other. We also notice that optimal prices λ⋆, as read from the generation values, follow
a low-high-low pattern on one bus and a high-low-high pattern on the other. This would be
unusual in practical settings, especially in planning scenarios, as the LMPs are often driven
by load profiles. If such a phenomenon were to occur in practice, it would indicate that (i)
the load profiles on these two buses complement each other in the sense that the load on bus
1 peaks when the load on bus 2 drops to its valley, and (ii) the transmission link between
the two buses is weak and congested so that the optimal/equilibrium prices still follow such
patterns. Given that each load bus in a transmission network often represents a collection
of smaller loads, the condition in (i) means that the aggregates of these small loads follow
very different temporal patterns at different locations in the network. Furthermore, if we
were concerned about determining which transmission lines to strengthen, conditions (i) and
(ii) are strong indicators for increasing the capacity of the line connecting these two buses.
In fact, for case B, doubling the line capacity eliminates the critical region with negative
Hessian entries.

CHAPTER 2. PLANNING OF ENERGY STORAGE 27
2.4.2 Verification of Submodularity Using a Polyhedral Character-
ization of Critical Regions
Albeit the negative Hessian case above appears unlikely to occur in practice and we have yet
to observe negative Hessian entries in all our simulations as discussed in Section 2.5, there is
no a priori theoretical guarantee that V is submodular. In other words, its submodularity
depends on problem settings, particularly the load and network data. Thus, it is of interest
to develop an efficient computation procedure which verifies the submodularity of V .
This is generally a challenging task, as verifying the submodularity of V by definition
involves checking an exponential number of inequalities. Theorem 2.3 reduces this problem
to checking the sign of Hessian entries of a continuous function, J(x) on X . Theorem 2.2
provides a way to compute the Hessian for almost every x ∈ X . It also shows that the
Hessian is invariant in each critical region, and is therefore sufficient to evaluate the Hessian
once per critical region in X . We now address how we could iterate over the critical regions.
We begin by providing an explicit polyhedral characterization of the critical region that
contains almost every capacity vector x. When x is on the boundary of two critical regions,
strict complementary slackness fails to hold and, in general, one may obtain a degenerate
solution. However, the set of boundary points has a Lebesgue measure of 0 and therefore does
not contribute to our submodularity characterization as shown in the proof of Theorem 2.3.
Thus, we can ignore these points for the rest of the discussion. Upon solving the multi-
period economic dispatch problem at x, we can identify the set of binding constraints and
the associated zstt and znett for t ∈ T . The critical region containing x can then be expressed
as the set of storage capacity vectors where the storage and network congestion states are
not changed.
Theorem 2.4. Given zstt (x) and znett (x), t ∈ T evaluated at an arbitrary x ∈ X (except for
a set of measure zero), the critical region containing x, denoted as Rx, is an open convex
polytope defined by the set of x ∈ Rn+ satisfying the linear inequalities
λ⋆n,t+1(x)− λ⋆n,t(x) > 0 ∀(n, t) ∈ N × T s.t. zstn,t(x) = 1,
λ⋆n,t+1(x)− λ⋆n,t(x) < 0 ∀(n, t) ∈ N × T s.t. zstn,t(x) = −1,β⋆ℓ,t(x) > 0 ∀(ℓ, t) ∈ LCt × T .
In other words, for each x ∈ Rx, the associated storage congestion pattern zstt and network
congestion pattern znett satisfy zstt (x) = zstt (x) and znett (x) = znett (x), t ∈ T .
Proof. See Appendix A.8.
Given this polyhedral characterization of the critical regions, the iterative construction of
all critical regions and the complexity of this process both follow from the standard practice
of multi-parametric quadratic programming [9]. Here, we provide a brief description of this
procedure. To start, we select an initial point x ∈ X0 , X and compute the critical region

CHAPTER 2. PLANNING OF ENERGY STORAGE 28
Rx that contains it by using Theorem 2.4. Focusing on the part of the critical region inside
of X0, i.e., Rx ∩ X0 while writing the inequality constraints that define this polytope as
Px ≤ q, we can partition the remaining region in X0 as
Xi , x ∈ X0 : P⊤i x ≥ qi, P⊤
j x ≤ qj , ∀j < i,
where P⊤i is the ith row of P . Recursively applying this process to Xi, we can obtain the
collection of all critical regions in X . This procedure is guaranteed to terminate in a finite
number of steps.
The rest of this subsection is devoted to a special case that garners a substantial amount
of practical interest as the amount of storage to be placed is usually small compared to the
total load and generation in the network. For example, the total power capacity of storage
installation in the United States was 221 MW in 2015 [42] while the average generation in
the same year was 467 GW.
Definition 2.3. A storage placement problem is said to satisfy the small storage condition,
if the capacity region X of interest is a subset of the closure of the critical region containing
x = 0, i.e., X ⊆ R0, with R0 defined in Theorem 2.4.
The immediate consequence of this condition for the purpose of verifying submodularity
is as follows [9].
Lemma 2.5. The multi-parametric programming procedure terminates in one step if small
storage condition holds.
Furthermore, if the small storage condition holds, the submodularity of V can be checked
using merely the LMP vector λ⋆t (0) and the network congestion pattern znett in the base case
where no storage has been installed. In other words, we can certify submodularity by simply
using the solutions of the single-period economic dispatch problems for time periods t ∈ T .
Corollary 2.3. Under the small storage condition, all x ∈ X share the same storage and
line congestion patterns as zstt (0) and znett (0), t ∈ T which can be obtained by solving T
single-period economic dispatch problems. Furthermore, if the network topology is a tree,
zstt (0) and znett (0), t ∈ T are uniquely determined using only the LMP data λ⋆(0).
To verify the small storage condition, we need to check whether the polytope R0 contains
the box X = [0, xmax]N . Instead of checking whether all 2N vertices of the box belong to
the polytope, we can simply compare the optimal value of the set containment problem
min ρ ∈ R+ : X ⊆ ρR0 with 1, where the scaled set ρR0 is x : (1/ρ)x ∈ R0. Write R0
as x : Px ≤ q. This set containment problem can be formulated as the following linear
program [36]:

CHAPTER 2. PLANNING OF ENERGY STORAGE 29
minρ,Λ
ρ
s.t. Λ[I, −I]⊤ = P
Λ[xmax1⊤, 0⊤]⊤ ≤ ρqρ,Λ ≥ 0.
(2.22)
Finally, we note that the small storage condition is equivalent to requiring that in-
stalling the storage does not affect congestion patterns for the planning scenario considered.
This may not hold for some storage placement settings in which case the full-blown multi-
parametric programming procedure described above should be used for verifying submodu-
larity.
2.4.3 Modified Greedy Algorithms
If the submodularity of the value function is verified, we can employ a (modified) greedy
algorithm to obtain a near-optimal solution. In particular, Nemhauser et al. [85] show that
a standard greedy algorithm gives a (1 − 1e )-approximation of an optimal solution when
maximizing monotone submodular functions subject to a cardinality or matroid constraint.
This algorithm is applicable to our problem when there is only one type of storage devices,
i.e., K = 1.
When multi-type devices are used (K > 1), this standard greedy algorithm may not
fully use the diminishing return property as the knapsack (budget) constraint (2.6b) can
cause it become stuck at an unreasonable solution. However, a modification of the greedy
algorithm is shown to achieve the same performance guarantee [62, 115]. This algorithm
uses the partial enumeration heuristic proposed by Khuller et al. [55] which enumerates
all subsets of up to three elements. Its details are presented in Algorithm 1. The first
candidate X1 of the solution maximizes the benefit V among all feasible sets of cardinality
one or two as shown in Line 1. The second candidate X2 is constructed in a greedy way by
locally optimizing the incremental benefit-cost ratio [V (X ∪ (n, k)) − V (X)]/ck starting
from each set X of cardinality three as illustrated in Lines 2–15. Finally, the algorithm
generates an output by comparing the two candidates X1 and X2. This polynomial-time
algorithm can also be implemented in a distributed fashion using the paralellizable method
proposed in [76].
An interesting feature of the proposed algorithm is that its dependence on the operation
model (2.4) is only though the value function V . Therefore, we may substitute our simple
operation model with one that captures more detailed characteristics of the storage tech-
nologies and power flows or even with a black-box simulator. The same greedy algorithm
can be directly applied to the setting with the substituted model. However, our theoretical
performance guarantees need to be extended to be useful in that setting.

CHAPTER 2. PLANNING OF ENERGY STORAGE 30
Algorithm 1: Modified greedy algorithm for energy storage placement
1 X1 ← argmaxV (X) : |X | ≤ 2,∑
(n,k)∈X ck ≤ b;2 X2 ← ∅;3 foreach X ⊆ Ω s.t. |X | = 3,
∑(n,k)∈X ck ≤ b do
4 Candidates← Ω \X ;5 while Candidates 6= ∅ do6 e← argmax(n,k)∈Candidates
V (X∪(n,k))−V (X)ck
;
7 if∑
k:(n,k)∈X∪e ck ≤ b then8 X ← X ∪ e;9 Candidates← Candidates \ e;
10 end
11 end12 if V (X) > V (X2) then13 X2 ← X ;14 end
15 end16 X⋆ ← argmaxX∈X1,X2 V (X);
2.4.4 Risk-Aware Placement
The uncertainty generated by the widespread penetration of variable renewable energy
sources (including wind and solar energy) is substantial in placement decision-making. In
this subsection, we explicitly consider the stochasticity of renewable generation or equiva-
lently net demand d. To this end, we now view the net demand vector d as a random variable
with a given density function, denoted as fd. The optimal cost function J(x) of economic
dispatch depends on the realization of d. To explicitly show this dependency, we rewrite
the cost function and its corresponding placement value function as J(x; d) and V (X ; d),
respectively. A standard way to account for the randomness of V (X ; d) is to extend the
storage placement (2.6) as a two-stage stochastic program that maximizes E[V (X ; d)] within
the same budget constraint. In the two-stage stochastic programming formulation8, the first
stage is for planning decisions determining the storage placement over the network; the sec-
ond stage is for operation decisions determining the generator and storage dispatch given
the realization of the net demand d. We consider a more general risk-aware formulation
than this mean-performance formulation as risks generated from renewable energy sources
are important factors in decision-making for power systems (e.g., [13,140]). Specifically, the
risk-aware placement problem can be formulated as the following combinatorial stochastic
8In principle, it is possible to utilize a multi-stage stochastic programming formulation featuring a moredetailed information update model for generator and storage operation. This is however less commonly thepractice in planning studies due to data availability and computational complexity concerns.

CHAPTER 2. PLANNING OF ENERGY STORAGE 31
program featuring a mean-risk objective:
maxX⊆Ω
E[V (X ; d)]− κρ(V (X ; d))
s.t.∑
k:(n,k)∈X
ck ≤ b,(2.23)
where ρ is a convex risk measure and the weight κ ≥ 0 represents the importance of risk
relative to mean value. The following theorem suggests that the submodularity of the
placement value function is preserved through the risk-aware formulation with a convex risk
measure, which is monotonically nonincreasing.
Theorem 2.5. Suppose that X 7→ V (X ; d) is nondecreasing submodular for each d ∈ D,
where D is the support of the density function fd. If ρ is a convex risk measure, then the
objective function of the stochastic program (2.23)
E[V (X ; d)]− κρ(V (X ; d))
is nondecreasing submodular.
Proof. See Appendix A.9.
Theorem 2.5, which implies that submodularity is preserved through our risk-aware
formulation, is a strong result as it holds independent of the shape of the density function
fd. When we use an empirical distribution of d with a finite number of samples, we are
supposed to check the submodularity of X 7→ V (X ; d) for each sample of d.
We now discuss a solution method for the risk-aware placement problem through an
example. Conditional value-at-risk (CVaR) is one of the most popular convex risk measures,
which is also coherent in the sense of Artzner et al. [3]. It measures the expected value
conditional upon being within some percentage of the worst-case scenarios. Formally, the
CVaR of a random variable Z, representing a loss, is defined as9
CVaRα(Z) , E[Z | Z ≤ VaRα(Z)], α ∈ (0, 1),
where the value-at-risk (VaR) of Z (with the cumulative distribution function FZ) is given
by
VaRα(Z) , infz ∈ R | FZ(z) ≥ α.
In words, VaR measures (1 − α) worst-case quantile of a loss distribution, while CVaR is
equal to the conditional expectation of the loss within that quantile. The computation of
CVaR can be efficiently performed by using the following extremal representation [105]:
CVaRα(Z) = infy∈R
[y +
1
1− αE[(Z − y)+]
].
9This definition is valid when the distribution of Z has no probability atom.

CHAPTER 2. PLANNING OF ENERGY STORAGE 32
Recalling that Z represents a loss or cost, we can compute the risk term in our optimization
problem as a convex program:
ρ(V (X ; d)) = CVaRα(−V (X ; d))
= infy∈R
[y +
1
1− αE[(−V (X ; d)− y)+]].
Since CVaR is a convex risk measure, if X 7→ V (X ; d) is nondecreasing submodular, The-
orem 2.5 allows us to use Algorithm 1 to solve the risk-aware placement problem (2.23).
This additional complexity comes from a one-dimensional convex optimization problem to
compute CVaRα(−V (X ; d)) at each greedy step. Other risk measures that result in such a
bilevel combinatorial-convex optimization problem can be found in [75].
2.5 Numerical Experiments
2.5.1 IEEE 14 Bus Case
Our placement algorithms are tested using the IEEE 14 bus test case. Hourly zonal aggre-
gated locational marginal price and load data are obtained from the PJM interconnection.
The data correspond to 14 zones inside PJM’s RTO for the year 2014. We consider the
hourly operation of storage over a representative day. The input data for each hour of the
representative day are obtained by averaging over all the 365 days of the year. The box
plots of the hourly price and load data over the 14 zones are plotted in Figure 2.4. The
hourly average load in the system is 80.5 GW.
The load and price time series for these 14 zones are assigned to the 14 buses of the
network, where the price data are used to specify the linear coefficient of generation cost.
We set the quadratic cost coefficients for all generators to be 0.01, which is the median value
of quadratic cost coefficients specified in the IEEE 14 bus test case in MATPOWER [141].
The capacity of each line is set to be the average load per bus over the 24 hours. We consider
a simple setting in which an exhaustive search is still feasible so that the performance of
the greedy placement can be compared to the exact optimal solution. To this end, we let
the type of storage be K = 1.
We now consider placing 5 storage devices in the 14 bus-network, with a total energy
capacity of 150 MWh. Using the optimal set containment optimization (2.22), we verify that
this setting satisfies the small storage assumption and that in the critical region the Hessian
condition in Theorem 2.3 holds. The greedy strategy in Algorithm 1 is implemented. We
also perform an exhaustive search over all feasible storage placements to verify the actual
performance of the algorithm. Instead of being (1 − 1/e) suboptimal as suggested by the
worst case performance bound, the greedy algorithm identifies the exact optimal placement
in this case, with buses 5, 11, 12, 1, 9 selected to place storage.

CHAPTER 2. PLANNING OF ENERGY STORAGE 33
30
40
50
60
70
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Hour
Pric
e ($
/MW
)(a)
5000
10000
15000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Hour
Load
(M
W)
(b)
Figure 2.4: Box plots of price and load data: (a) locational marginal price, and (b) load.
2.5.2 Other Test Cases
To further examine the performance of greedy placement, we test the algorithm with a
variety of other IEEE test cases together with a randomized assignment of the PJM load and
price data to the network buses.10 For larger networks, it is no longer feasible to benchmark
the greedy performance against the exact optimal placement which should be identified
through an exhaustive search. Therefore, we compare the greedy performance and run-time
against that of a mixed-integer quadratic programming (MIQP) solver from Gubori. As
the solver implements a branch-and-bound algorithm, the Gurobi solution comes with a
posterior performance bound on the optimal cost. For each of the test network topology, we
follow the setup in the previous subsection but vary the total storage capacity from 0.5% of
the average system-wide load to 5% of the system-wide load.
For each of the 40 problem instances (4 IEEE test cases and 10 total storage configura-
tions), the following observations hold:
• The small storage condition is valid and thus the placement value function is submod-
ular;
• The greedy algorithm achieves the same storage placement value (and the system-wide
cost) as the MIQP-based method.
• Per the error bound provided by the branch-and-bound procedure, the MIQP-based
10We use a random assignment due to a lack of real demand time series for the IEEE test cases. With therandom assignment, the demand (and price) time series for each node is a linear combination of the demand(and price) time series of the PJM zonal demand data with coefficients generated uniformly at random.

CHAPTER 2. PLANNING OF ENERGY STORAGE 34
method finds the global optimal solution up to a numerical tolerance of 10−4 and
therefore so does the greedy algorithm.
14 30 57 118Bus numbers
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
MIQ
Pruntime
Greed
yruntime×
100%(%
)
7.65% 23.97%
248.77%
4948.53%
Figure 2.5: Average run-time comparison between the greedy algorithm and the MIQP-based method.
Figure 2.5 compares the run-time of these two methods, in which we have averaged the run-
times across the storage capacities as we have not observed significant or systematic variation
in run-time when the storage capacities are changed (the number of storage to be placed are
fixed to be 5 as in the previous subsection). The run-time comparison demonstrates that
the greedy method has superior scalability compared to the MIQP-based method, which is
consistent with the fact that the greedy approach is a polynomial time algorithm, whereas
branch-and-bound procedure takes exponential time in the worst case.
2.6 Conclusions
In this chapter, we have proposed a discrete optimization-based framework for placing en-
ergy storage devices in a power network when all storage resources are optimally controlled
to minimize system-wide cost. This approach is useful at explicitly accounting for hetero-
geneous storage installation and capital costs. To use a scalable modified greedy algorithm
to solve this NP-hard combinatorial optimization problem, we have investigated a tight
condition under which the placement value function is submodular. Based on our com-
prehensive analytical characterization of the optimal cost, prices, and critical regions in a
parametric economic dispatch problem with storage dynamics, we have also developed an
efficient computational method to verify submodularity, and gained the unique insight that
the spatio-temporal congestion pattern of a power network is a critical factor for submodu-
larity.

Chapter 3
Stochastic Control of
Distributed Energy Storage
35

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 36
3.1 Introduction
Deep penetration of renewable energy generation is essential to ensure a sustainable future.
Renewable energy resources, such as wind and solar, are intrinsically variable. Uncertainties
associated with these intermittent and volatile resources pose a significant challenge to their
integration into the existing grid infrastructure [81]. More flexibility, especially in shifting
energy supply and/or demand across time and network, is desired to cope with the increased
uncertainties.
Energy storage provides the functionality of shifting energy across time. A vast array
of technologies, such as batteries, flywheels, pumped-hydro, and compressed air energy
storages, are available for such a purpose [66, 80]. Furthermore, flexible or controllable
demand provides another ubiquitous source of storage. Deferrable loads – including many
thermal loads, loads of internet data-centers and loads corresponding to charging electric
vehicles (EVs) over certain time interval [33] – can be interpreted and controlled as storage
of demand [89]. Other controllable loads which can possibly be shifted to an earlier or later
time, such as thermostatically controlled loads (TCLs), may be modeled and controlled as a
storage with negative lower bound and positive upper bound on the storage level [46]. These
forms of storage enable inter-temporal shifting of excess energy supply and/or demand, and
significantly reduce the reserve requirement and thus system costs.
On the other hand, shifting energy across a network, i.e., moving excess energy supply
to meet unfulfilled demand among different geographical locations with transmission or
distribution lines, can achieve similar effects in reducing the reserve requirement for the
system. Thus in practice, it is natural to consider these two effects together. Yet, it remains
mathematically challenging to formulate a sound and tractable problem that accounts for
these effects in electric grid operations. Specifically, due to the power flow and network
constraints, control variables in connected buses are coupled. Due to the storage constraints,
control variables in different time periods are coupled as well. On top of that, uncertainties
associated with stochastic generation and demand dramatically complicate the problem, due
to the large number of recourse stages and the need to account for all probable realizations.
Two categories of approaches have been proposed in the literature. The first category
is based on exploiting structures of specific problem instances, usually using dynamic pro-
gramming. These structural results are valuable in providing insights about the system, and
often lead to analytical solution of these problem instances. However, such approaches rely
heavily on specific assumptions of the type of storage, the form of the cost function, and the
distribution of uncertain parameters. Generalizing these results to other specifications and
more complex settings is usually difficult, and consequently this approach is mostly used to
analyze single storage systems. For instance, analytical solutions to optimal storage arbi-
trage with stochastic price have been derived in [100] without storage ramping constraints,
and in [38] with ramping constraints. Problems of using energy storage to minimize energy
imbalance are studied in various contexts; see [98, 101, 102, 113] for reducing reserve energy

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 37
requirements in power system dispatch, [15,57] for operating storage co-located with a wind
farm, [124, 126] for operating storage co-located with end-user demands, and [50] for stor-
age with demand response. The other category relies on the use of heuristic algorithms,
such as Model Predictive Control (MPC) [136] and look-ahead policies [82], to identify sub-
optimal storage control rules. Usually based on deterministic (convex) optimization, these
approaches can be easily applied to general networks. The major drawback is that these
approaches usually do not have any performance guarantee. Consequently, it lacks theoret-
ical justification for their implementation in real systems. Examples of this category can be
found in [136] and references therein.
This chapter aims at designing distributed online deterministic optimizations that solve
the stochastic control problem with provable guarantees. It contributes to the existing lit-
erature in the following ways. First, we formulate the problem of storage network operation
as a stochastic control problem with general cost functions, which encapsulates a variety
of problems with different types of storage as well as different uses of storage. Second, we
devise an online algorithm for the problem based on the theory of Lyapunov optimization,
and provide guarantees for its performance by proving a bound of its sub-optimality. This
converts the “intractable” stochastic control program to a sequence of tractable determin-
istic optimization programs. The bound is useful not only in assessing the performance of
our algorithm, but also in evaluating the performance of other sub-optimal algorithms when
the optimal costs are difficult to obtain. It can also be used to estimate the maximum cost
reduction that can be achieved by any storage operation, thus provides understanding for
the limit of a certain storage system. To the best of our knowledge, this is the first algorithm
with provable guarantees for the general networked storage operation problem. Finally, we
derive task-based distributed implementation of the online algorithm using the alternating
direction method of multipliers (ADMM).
The rest of the chapter is organized as follows. Section 3.2 formulates the problem of
operating a storage network under uncertainty. Section 3.3 gives the online algorithm and
states the performance guarantee. Section 3.4 discusses the distributed implementation of
the online program. Numerical examples are then given in Section 3.5. Section 3.6 concludes
the chapter.
3.2 Problem Formulation
3.2.1 Notation
Although we seek notational consistency across the thesis, definitions of variables should
be assumed to be independent across different chapters unless stated otherwise. For a
directed graph G(N ,L), with node set N , 1, . . . , N and edge set L , 1, . . . , L, defineN (ℓ) , n ∈ N : n ∼ ℓ, and L(n) , ℓ ∈ L : ℓ ∼ n, where n ∼ ℓ (or ℓ ∼ n) means
that edge ℓ and node N are incident. We assume that all these sets are equipped with

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 38
the natural order. For any vector v ∈ Rk and D ⊆ [k] , 1, . . . , k, vD ∈ R|D| is the
sub-vector containing entries of v indexed by set D. Similarly, for any matrix M ∈ Rd1×d2 ,
and D1 ⊆ [d1] and D2 ⊆ [d2], MD1,D2∈ R|D1|×|D2| is the sub-matrix containing rows and
columns of M indexed by sets D1 and D2, respectively. For any variable x ∈ RL that is
defined for each edge, if edge ℓ ∈ L is incident to nodes N and n′, we use the notations xℓ
and xnn′ interchangeably to refer to the ℓth element of x. For any x ∈ R, (x)+, max(x, 0)
and (x)−, (−x)+. An extended real valued function f(x) with domain dom f = C ⊆ Rk is
such that f(x) =∞ if x 6∈ C.
3.2.2 Centralized Problem
We model the power grid as a directed graph G(N ,L), with N = [N ] , 1, . . . , N, L =
[L] , 1, . . . , L, where N is the number of nodes and L is the number of edges. Here each
node models a bus and each edge models a line. To simplify the exposition, we assume each
bus n is connected to all of the following types of devices:1
• Uncontrollable net supply. A renewable generator and a load are connected to the bus,
with the net power supply, i.e., the generation minus the demand, at time period t
denoted by δn,t. As both demand and generation can be stochastic, δn,t is in general
stochastic.
• Energy storage2. A storage with storage capacity Smaxn , minimum storage level Smin
n ,
storage charging limit Umaxn , and storage discharging limit −Umin
n is connected to the
bus. The storage level (or state of charge) is denoted by sn,t and the storage control
is denoted by un,t with un,t > 0 representing charging and un,t < 0 representing
discharging. For each time period t, we have constraints
Sminn ≤ sn,t ≤ Smax
n
and
Uminn ≤ un,t ≤ Umax
n .
The storage dynamics is
sn,t+1 = λnsn,t + un,t,
where λn ∈ (0, 1] is the storage efficiency which models the energy loss over time
without storage operation. We denote the set of parameters for the storage at bus
1By setting the problem data properly, we can model buses which are only connected to a subset of thesedevices. For example, a generator bus with no renewables and no storage can be modeled by setting δn,t = 0and Smin
n = Smaxn = 0.
2The energy storage model differs from the energy storage model introduced in Section 2.2.3 in twoways. First, for the operation problem considered in this chapter, we utilize a more detailed energy storagemodel that captures storage characteristics via additional constraints and loss parameters. Second, the signconventions for charging and discharging in this chapter and in Section 2.2.3 are different. The choice ofsign convention is Section 2.2.3 is made for notational convenience in expressing certain price variables andfor consistency with prior literature on storage planning.

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 39
n by Sn , λn, Sminn , Smax
n , Uminn , Umax
n . Here the set of parameters for each stor-
age satisfies the feasibility and controllability assumptions (see Assumption B.1 in
Appendix B.2 and [97] for more discussions).
• Conventional generator. Its generation at time period t is denoted by g+n,t (≥ 0) and
its convex cost function is denoted by c+n (·). It is possible in certain scenarios to have
more supply than demand (e.g., when there is too much wind generation). In such
cases, let g−n,t (≥ 0) be the generation curtailment at time period t and c−n (·) be the
cost associated with the curtailment. Without loss of optimality, we can summarize
g+n,t and g−n,t by a single variable gn,t such that g+n,t = (gn,t)
+and g−n,t = (gn,t)
−. Then
the total cost at bus n and in time period t is
cn(gn,t) = c+n (g+n,t) + c−n (g
−n,t).
Optionally, the cost can depend on a stochastic price parameter pn,t ∈ [Pminn , Pmax
n ],
so that we write the cost as cn(gn,t; pn,t).
We use the classic DC approximation for AC power flow as in Section 2.2.2. For convenience,
in this chapter, we work with voltage phase angles denoted by θn,t for time period t on bus
n. The real power flow from bus n to bus n′ can be written as
fnn′,t = Ynn′(θn,t − θn′,t),
where Y ∈ RN×N is the imaginary part of the admittance matrix (Y-bus matrix) under
DC assumptions, and fnn′,t satisfies line flow constraints −Fmaxnn′ ≤ fnn′,t ≤ Fmax
nn′ , where
Fmaxnn′ = Fmax
n′n > 0 is the real power flow capacity of the line connecting bus n and bus n′.
We can now formulate the problem as a stochastic control problem as follows:
min (1/T )E
T∑
t=1
N∑
n=1
cn(gn,t; pn,t) (3.1a)
s.t. δn,t + gn,t = un,t +N∑
n′=1
fnn′,t, (3.1b)
sn,t+1 = λnsn,t + un,t, (3.1c)
Uminn ≤ un,t ≤ Umax
n , (3.1d)
Sminn ≤ sn,t ≤ Smax
n , (3.1e)
Ynn′(θn,t − θn′,t) = fnn′,t, (3.1f)
− Fmaxnn′ ≤ fnn′,t ≤ Fmax
nn′ , (3.1g)
where T is the total number of time periods under consideration, the expectation is taken
over pn,t and δn,t, constraints (3.1b), (3.1c), (3.1d) and (3.1e) hold for all n and t, constraints

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 40
(3.1f) and (3.1g) hold for all n, n′ and t, and sn,1 ∈ [Sminn , Smax
n ] is given for each n. Here the
goal is to find an optimal control policy for each time period t which maps the information
available up to the time period to the optimal decisions (u⋆t , g⋆t , θ
⋆t , f
⋆t ).
Albeit the bulk of this chapter focuses on the formulation (3.1), we note that it can be
extended in various directions.
Remark 3.1 (Generalized storage Model). The storage model described above consider
primarily energy storage. But following the development in [97], it is easy to incorporate
other type of generalized storage such as deferrable loads modeled as storage of demand, and
collections of thermostatically controlled load. In addition, the energy loss during charg-
ing/discharging can be modeled with conversion functions. For example, a storage with
charging coefficient µC ∈ (0, 1] and discharging coefficient µD ∈ (0, 1] can be modeled us-
ing charging conversion function hC(u) = (1/µC)u and discharging conversion function
hD(u) = µDu, respectively. See [97] for more details.
Remark 3.2 (Nonconvex cost). The assumption that cn is convex for each n ∈ [N ] is not
strictly necessary. See [95] for generalization to general subdifferentiable functions.
Remark 3.3 (Other costs and constraints). Many other costs including operational cost
of storage due to charging and discharging, and other constraints including bounds on the
generation and phase angles can be added without altering our results and the proofs. In
fact, the cost can be a function of the form cn , cn(un,t, rn,t, θn,t, δn,t, pn,t).
Our prior work [97] can be viewed as the single bus special case of the problem formu-
lated here. Thus the examples for different use cases of the storage (e.g., balancing and
arbitrage) discussed in [97] can also be encapsulated into our current framework together
with a network. The incorporation of the network element allows our methodology to be
applied to a broader range of problems such as microgrid management and storage-based
real-time regulation for the bulk power grid.
3.2.3 Cluster based Distributed Control
Solving problem (3.1) in a centralized fashion may not be feasible due to concerns re-
garding privacy, communication, and computation. First of all, specifying the centralized
problem (3.1) requires information about the cost functions and parameters of the devices
connected to each of the buses, and the probability distributions of all local stochastic pa-
rameters. This process involves agents who own the generators, storages, as well as power
consumers who may not be willing to report such data. Even if the data reporting is granted,
gathering all these data from nodes of a large power network, and subsequently disseminat-
ing the optimal control signal obtained from the centralized solution in real time presents
a challenge on the communication system required. The large amount of data that have
to be sent to and from the centralized control center may lead to traffic congestions and

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 41
delays in the data delivery. Finally, granting an adequate communication infrastructure in
place, solving the stochastic control problem formulated in (3.1) over a large network is
not tractable due to a lack of practical algorithms, i.e., existing algorithms either do not
have any performance guarantee or do not scale gracefully with the number of buses of the
system.
A cluster-based control architecture for the future grid is envisioned in [4]. Here we
present a first step in achieving such an architecture. In particular, we consider solving the
centralized problem (3.1) with resource clusters. Suppose that the network is partitioned
into D clusters. Each cluster Cd consists of a subset of nodes Nd ⊂ N and a subset of lines
Ld ⊂ L, i.e., Cd , (Nd,Ld), and is controlled by a cluster controller (CC). The CC for each
cluster Cd
• possesses local static information including cn and Sn for all n ∈ Nd, and Yℓ and Fmaxℓ
for all ℓ ∈ Ld,
• senses local disturbances δn,t and pn,t for all n ∈ Nd and all t,
• controls local variables un,t, gn,t and θn,t for all n ∈ Nd, and fℓ,t for all ℓ ∈ Ld and all
t,
• and communicates with its neighbors GNdwhere GNd
is the collection of Gw’s for
which there exists ℓ ∈ Ld, n ∈ Nw such that ℓ ∼ n, or there exists ℓ ∈ Lw, n ∈Nd such that ℓ ∼ n.
Here we provide a bird-eye view of our approach for tackling the challenging distributed
stochastic control problem which we just formulated. Section 3.3 provides an online al-
gorithm that converts the centralized stochastic control program to a sequence of online
deterministic optimization. Section 3.4 then presents the decentralization of these online
deterministic optimization using the alternating direction method of multipliers (ADMM).
3.3 Online Modified Greedy Algorithm for Networked
Storage Control
3.3.1 Algorithm
We propose a very simple algorithm to solve the centralized problem (3.1) with performance
guarantees. The algorithm, termed the network online modified greedy (OMG) algorithm,
is composed of an offline and online phase. Next we describe the input data of the algorithm
and each phase.
Input Data. Similar to the single storage online modified greedy (OMG) algorithm [97],
for each bus n ∈ [N ], in addition to the storage parameters Sn and the cost functional form

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 42
cn, the algorithm requires two input parameters that are a lower bound, denoted by Dcn,
and an upper bound, denoted by Dcn, for the subdifferential of the objective function cn
with respect to un,t.3
Remark 3.4 (Distribution-free method). As in the single storage case [97], The OMG
algorithm is a distribution-free method in the sense that almost no information regarding
the joint probability distribution of the stochastic parameters δn,t and pn,t are required. The
only exception is when calculating Dcn and Dcn, the support of pn,t and δn,t may be needed.
Comparing to the entire distribution functions, it is much easier to estimate the supports of
the stochastic parameters from historical data.
Offline Phase. Before running the algorithm, each bus n ∈ [N ] needs to calculate two
algorithmic parameters, namely a shift parameter Γn and a weight parameterWn. Any pair
(Γn,Wn) satisfies the following conditions can be used:
Γminn ≤Γn ≤ Γmax
n , (3.2)
0 <Wn ≤Wmaxn , (3.3)
where Γminn , Γmax
n and Wmaxn are functions of the storage parameters Sn and subdifferential
bounds Dcn and Dcn whose definitions can be found in Appendix B.1.
It will be clear later that the sub-optimality bound depends on the choice of (Γn,Wn).
As in [97], we provide two approaches for selecting these parameters
• The maximum weight approach (maxW): Setting Wn = Wmaxn reduces the interval in
(3.2) to a singleton (Γminn = Γmax
n ) and hence determines a unique Γn.
• The minimum sub-optimality bound approach (minS): It turns out that the sub-
optimality bound of OMG, as a function of (Γn,Wn)’s for all n ∈ [N ], can be minimized
using a semidefinite program reformulation. This approach uses the set of (Γn,Wn)’s
minimizing the sub-optimality bound.
Online Phase. At the beginning of each time period t, the OMG algorithm solves a
deterministic optimization as follows
min
N∑
n=1
(λn/Wn)(sn + Γn)un + cn(gn; pn) (3.4a)
s.t. Uminn ≤ un ≤ Umax
n , (3.4b)
δn + gn = un +
N∑
n′=1
fnn′ , (3.4c)
Yn′n(θn′ − θn) = fn′n, (3.4d)
3Mathematical expressions for these parameters are relegated to Appendix B.1.

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 43
− Fmaxn′n ≤ fn′n ≤ Fmax
n′n . (3.4e)
where the decision variables are u, g, θ and f , and we have dropped the dependence on t to
simplify the notation. This treatment is justified by the fact that (3.4) does not involve the
charging and discharging constraints induced by the storage capacity and storage dynamics,
i.e., we have removed constraints (3.1c) and (3.1e), which can be alternatively summarized
as
Sminn ≤ λnsn + un ≤ Smax
n . (3.5)
It will be shown later in Appendix B.2 that (3.5) holds automatically given that the algo-
rithmic parameters of OMG satisfy conditions in (3.2) and (3.3).
The optimization is similar to the greedy heuristics which minimize the cost for each
period, i.e.,∑N
n=1 cn(gn; pn), subject to constraints of (3.4) together with constraint (3.5)
in each step. Instead of directly optimizing the cost at the current time period, for each
storage, the OMG algorithm optimizes a weighted combination of the stage-wise cost and a
linear term of un depending on the shifted storage level sn+Γn. Here the weight parameter
Wn decides the importance of the original cost in this weighted combination, while the shift
parameter Γn defines the shifted state given the original state sn. Roughly speaking, the
shifted state sn + Γn belongs to an interval [Sminn + Γn, S
maxn + Γn] which usually contains
0. For fixed Wn > 0, if the storage level is relatively high, the shifted state is greater than
0, such that the state-dependent term (i.e., (λn/Wn)(sn +Γn)un) encourages a negative un
(discharge) to minimize the weighted sum. As a result, the storage level in the next time
period will be brought down. On the other hand, if the storage level is relatively low, the
shifted state is smaller than 0, such that the state-dependent term encourages a positive
un (charge) and consequently the next stage storage level is increased. These two effects
together help to hedge against uncertainty by maintaining a storage level somewhere in
the middle of the feasible interval. More detailed discussion regarding the design of the
modification term in the objective can be found in [97].
3.3.2 Performance Guarantees
We provide a stylized analysis for the performance of OMG.
Assumption 3.1. The following assumptions are in force for the analysis in this section.
A1 Infinite horizon: The horizon length T approaches to infinity.
A2 IID disturbance: The disturbance process (δt, pt) ∈ R2N : t ≥ 1 is independent and
identically distributed (i.i.d.) across t and is supported on a compact set such that
δn,t ∈ [δminn , δmax
n ] and pn,t ∈ [Pminn , Pmax
n ] for all n ∈ [N ] and all t. Note that any
correlation structure is allowed for variables in the same time period.

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 44
A3 Frequent acting: The storage parameters satisfy Umaxn − Umin
n < Smaxn − Smin
n for all
n ∈ [N ].
Here A1 and A2 are technical assumptions introduced to simplify the exposition. Relax-
ingA1 leads to no change in our results except an extra term ofO(1/T ) in the sub-optimality
bound. For large T , this term is negligible. [97] discusses how to reduce A2. Under these
two assumptions, the storage operation problem can be cast as an infinite horizon average
cost stochastic optimal control problem in the following form
min limT→∞
(1/T )E[ T∑
t=1
N∑
n=1
cn(gn,t; pn,t)]
(3.6a)
s.t. (3.1b), (3.1c), (3.1d), (3.1e), (3.1f), (3.1g). (3.6b)
Assumption A3 states that the range of feasible storage control Umaxn − Umin
n is smaller
than the range of storage levels Smaxn − Smin
n , i.e., the ramping limits of the storage is
relatively small compared to the storage capacity. For any storage system, this assumption
is true as long as the length of each time period ∆t is made small enough; see [97] for more
details.
Define J(u, g, θ, f) as the total cost of problem (3.6) induced by the sequence of control
actions (ut, gt, θt, ft), t ≥ 1 and J⋆ = J(u⋆, g⋆, θ⋆, f⋆) as the minimum cost of the average
cost stochastic control problem with (u⋆t , g⋆t , θ⋆t , f⋆t ), t ≥ 1 being the corresponding optimal
control sequence. The main results regarding the performance of the OMG algorithm is
summarized as follows, whose proof is relegated to Appendix B.2.
Theorem 3.1 (Performance). The control sequence (uol, gol, θol, fol) , (uolt , golt , θolt , folt ), t ≥
1 generated by the OMG algorithm is feasible with respect to all constraints of problem (3.1)
and its sub-optimality is bounded by∑N
n=1Mn(Γn)/Wn, that is
J⋆ ≤ J(uol, gol, θol, fol) ≤ J⋆ +
N∑
n=1
Mn(Γn)/Wn, (3.7)
where
Mn(Γn) =Mun (Γn) + λn(1 − λn)M s
n(Γn),
Mun (Γn) =
1
2max
((Uminn +(1−λn)Γn
)2, (Umax
n +(1−λn)Γn)2),
M sn(Γn) = max
((Sminn + Γn
)2, (Smax
n + Γn)2).
The theorem above guarantees that the cost of the OMG algorithm is no greater than
J⋆ +∑N
n=1Mn(Γn)/Wn.
In many cases, we are interested to minimize the sub-optimality bound. This can be

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 45
cast as the following optimization
PO: min
N∑
n=1
Mn(Γn)/Wn
s.t. Γminn ≤ Γn ≤ Γmax
n , 0 < Wn ≤Wmaxn ,
where the optimization variables are (Γn,Wn), n ∈ [N ], and the constraints hold for all
n ∈ [N ]. Observing that the objective and constraints are separable across buses, we can
solve this program separately on each bus via a semidefinite program (SDP) as in the single
storage case [97]. Here the SDP is reproduced for completeness.
Lemma 3.1 (Semidefinite Reformulation of PO). For each n ∈ [N ], let symmetric positive
definite matrices Xmin,un , Xmax,u
n , Xmin,sn and Xmax,s
n be defined as follows
X(·),un =
[ηun U
(·)n + (1− λn)Γn
∗ 2Wn
], X(·),s
n =
[ηsn S
(·)n + Γn
∗ Wn
],
where (·) can be either max or min, and ηu and ηs are auxilliary variables. Then PO can
be solved via the following semidefinite program
min ηun + λn(1− λn)ηsn (3.8a)
s.t. Γminn ≤ Γn ≤ Γmax
n , 0 < Wn ≤Wmaxn , (3.8b)
Xmin,un , Xmax,u
n , Xmin,sn , Xmax,s
n 0, (3.8c)
where Γminn and Γmax
n are linear functions of Wn as defined in (B.2) and (B.3).
We close this section by summarizing some of the properties for the sub-optimality bound
at each bus n in the next remark; more detailed discussion and examples of the uses of the
sub-optimality bound can be found at [97].
Remark 3.5 (Properties ofMn(Γn)/Wn). For the per bus sub-optimality boundMn(Γn)/Wn,
let (Γ⋆n,W
⋆n) be the bound minimizing parameter choice. The following properties are true.
• For ideal storage (λn = 1), Mn(Γn)/Wn is minimized with maxW parameter specifica-
tion.
• The OMG algorithm is near-optimal for ideal storage with large storage capacity, i.e.,
with Umaxn − Umin
n being fixed, Mn(Γ⋆n)/W
⋆n → 0 when Smax
n − Sminn →∞.
• We also have Mn(Γ⋆n)/W
⋆n → 0 if Umax
n − Uminn → 0 and λn → 1, while Smax
n − Sminn
is fixed (which may be the case when the storage is controlled frequently such that the
length of each time period ∆t→ 0).

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 46
3.4 Distributed Online Control Via Alternating Direc-
tion Method of Multipliers
Results in previous section convert the stochastic control program (3.1) to a sequence of
online deterministic optimization programs. In this section, we take a bottom-up approach
in deriving a decentralized solution to (3.1). In particular, we first reformulate the online
program and then apply ADMM to obtain a fully distributed algorithm that specifies com-
putation and communication tasks for each bus and each line of the network. We then
associate the corresponding tasks to the CC’s to which these buses or lines belong. For a
survey of ADMM, see [21].
3.4.1 Node-Edge Reformulation
In order to obtain a fully distributed algorithm that uses only local computation and neigh-
borhood communication, it is necessary to ensure that all constraints of the optimization
program only couple variables controlled by pairs of neighboring node and edge so that all
communication can be implemented using simple pairwise messages. To this end, we refor-
mulate the online program (3.4) by creating local copies of certain variables. In particular, let
xn , (un, gn, θn, fn,L(n))⊤ be the local (primal) variables at node n, and zℓ , (fℓ, θℓ,N (ℓ))
⊤
be the local (primal) variables at edge ℓ, where fn,L(n) ∈ R|L(n)| is node n’s local auxiliary
copy of edge variable fL(n), and θℓ,N (ℓ) ∈ R2 is edge ℓ’s local auxiliary copy of node variable
θN (ℓ). Here we use the notation fn,ℓ for ℓ ∈ L(n) to refer to n’s local copy of variable fℓ;
the similar notation θℓ,n is also used. Then program (3.4) can be written as
min
N∑
n=1
qn(xn) +
L∑
ℓ=1
hℓ(zℓ) (3.9a)
s.t. fn,L(n) = fL(n), ∀n ∈ [N ], (3.9b)
θℓ,N (ℓ) = θN (ℓ), ∀ℓ ∈ [L], (3.9c)
where extended real valued functions qn and hℓ summarize the separable objective and
constraints at node n and edge ℓ, respectively, and are defined as follows
qn(xn) , qn(un, rn, θn, fn,L(n)) , (λn/Wn)(sn + Γn)un + cn(gn; pn),
with domain dom qn = xn : Uminn ≤ un ≤ Umax
n , δn + gn + An,L(n)fn,L(n) = un, θn ∈ R,and hℓ(zℓ) = 0 with domhℓ , zℓ : fℓ = BℓA
TN (ℓ),ℓθℓ,N (ℓ), −Fmax
ℓ ≤ fℓ ≤ Fmaxℓ . Here
constraints (3.9b) and (3.9c) ensure that at the solution, these local auxiliary variables must
be equal to the corresponding true variables. The (scaled) dual variables4 corresponding
to constraints (3.9b) and (3.9c) are denoted by ηn and ξℓ, respectively. We proceed to
4See Appendix B.3 for more details.

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 47
state the task-based distributed ADMM. The derivation of the algorithm is relegated to
Appendix B.3.
At each iterate, indexed by k, the following tasks (jobs) are issued and completed in
order:
• J NP,kn : Each node n ∈ [N ] performs node primal update:
xk+1n = argmin
xn
qn(xn) +ρ
2‖fn,L(n) − fk
L(n) + ηkn‖22 +∑
ℓ∈L(n)
ρ
2(θkℓ,n − θn + ξkℓ,n)
2,
and then passes a message containing θk+1n and fk+1
n,ℓ to each neighboring edge ℓ ∈ L(n).
• J EP,kℓ : Each edge ℓ ∈ [L] performs edge primal update:
zk+1ℓ = argmin
zℓ
hℓ(zℓ) +ρ
2‖θℓ,N (ℓ) − θk+1
N (ℓ) + ξkℓ ‖22 +∑
n∈N (ℓ)
ρ
2(fk+1
n,ℓ − fℓ + ηkn,ℓ)2,
and then passes a message containing fk+1ℓ and θℓ,n to each neighboring node n ∈ N (ℓ).
• J ND,kn : Each node n ∈ [N ] performs node dual update:
ηk+1n = ηkn + fk+1
n,L(n) − fk+1L(n),
and passes a message containing ηk+1n,ℓ to each neighboring edge ℓ ∈ L(n).
• J ED,kℓ : Each edge ℓ ∈ [L] performs edge dual update:
ξk+1ℓ = ξkℓ + θk+1
ℓ,N (ℓ) − θk+1N (ℓ),
and passes a message containing ξk+1ℓ,n to each neighboring node n ∈ N (ℓ).
We summarize the convergence property of the iterates specified above, whose proof is
relegated to Appendix B.3.
Lemma 3.2. The iterates (xk, zk) produced by jobs J k =J NP,k[N ] ,J EP,k
[L] ,J ND,k[N ] ,J ED,k
[L]
are convergent. Let x⋆ , limk→∞ xk and z⋆ , limk→∞ zk. Then (x⋆, z⋆) is primal feasible
and achieves the minimum cost of problem (3.9). Furthermore, the rate of convergence is
O(1/k).
Remark 3.6. Minimum amount of assumptions are required to obtain the convergence
results given in Lemma 3.2. In particular, we do not assume the objective function is
strongly convex which is a necessary assumption for standard distributed algorithms based
on primal or dual decomposition. Furthermore, the rate of convergence for our algorithm
is superior to primal or dual decomposition based algorithms, which usually have a rate of
convergence O(1/√k).

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 48
Remark 3.7 (Asynchronous variant). Based on the analysis in [129], one can easily ex-
tend the algorithm described above to its asynchronous counterpart with similar convergence
guarantees.
3.4.2 Cluster-based Implementation
In a cluster-based distributed control environment, each CC is responsible for a subset of
resources in the grid. It is not necessary the case that there is a CC for each node and each
edge. However, issuing tasks defined for each node and edge to the associated CC would
implement our distributed algorithm in a cluster-based control environment. The iterates
now have the following form: in order, each CC d ∈ [D] (i) performs J NP,kn for all n ∈ Nd,
(ii) performs J EP,kℓ for all ℓ ∈ Ld, (iii) performs J ND,k
n for all n ∈ Nd, and (iv) performs
J ED,kℓ for all ℓ ∈ Ld. Note that if the source and destination of a message belong to different
CCs, instead of direct communications between the node-edge pair, the message is sent from
the CC containing the source to the CC containing the destination5; if a single CC controls
both the source and destination of a message, the corresponding messaging step may be
skipped.
3.5 Numerical Tests
In this section, we show three sets of numerical tests with different focuses. The first example
(Subsection 3.5.1) uses synthetic data that honor the i.i.d. assumption in Section 3.3.2 to
demonstrate the use of the online algorithm and to show how the sub-optimality bound scales
with storage parameters. The second example (Subsection 3.5.2) applies the algorithm on
IEEE 14 bus network together with real demand and wind data. The i.i.d. assumption no
longer holds in this setup. We also demonstrate the convergence of ADMM in this setting.
The last example (Subsection 3.5.3) is constructed in particular to show how the distributed
algorithm scales with the number of buses of the system. All examples are implemented
and tested using Matlab 2014a on a workstation with AMD Magny Cours 24-Core 2.1 GHz
CPU and 96GB RAM.
3.5.1 Star Network
Consider a star network, i.e., a tree with a root node and (N − 1) leaf nodes. Assuming a
homogeneous setting, all nodes are connected to identical power system components, and
thus we only provide specification for a single bus n. The storage network is operated for
the purpose of balancing the demand and supply residual due to forecast errors in the wind
5Recall the setup in Section 3.2.3: each CC d can communicate with its neighbors CNdwhere CNd
isthe collection of Cw’s for which there exists ℓ ∈ Ld, n ∈ Nw such that ℓ ∼ n, or there exists ℓ ∈ Lw,n ∈ Nd such that ℓ ∼ n. As all messaging tasks only involve incident node-edge pairs, the communicationbetween these CCs are possible.

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 49
power generation. The motivation of this setting in a single storage scenario is discussed in
detail in [113]. Let δn,t models the wind forecast error process for each bus n. We simulate
the δn,t processes by generating Laplace distributed random variables with zero mean and
standard deviation σδ = 0.149 p.u. as in [113], which are estimated empirically using the
NREL dataset. Two cases with different cost functions are considered. In the first case,
time homogeneous costs of the form
cn = (gn,t)−, (3.10)
are considered; in the second case, the cost function is modified to have a higher penalty
rate during the day
cn =
3 (gn,t)
−t ∈ T Day,
(gn,t)−, otherwise,
with T Day is the set of time points during the day (7am to 7pm in our tests). We consider
non-idealized storages which are operated frequently such that λn = 0.999 with conversion
coefficients being µCn = µD
n = 0.995 (cf., Remark 3.1) and −Uminn = Umax
n = (1/10)Smaxn .
We have N = 5 and Fmaxℓ = σδ for each line ℓ ∈ [L]. The time horizon for the simulation is
chosen to be T = 1000. Figure 3.1 shows the percentage cost savings compared to the no
storage scenario. Albeit the greedy heuristics have been proved to be the optimal solution
for single storage systems in the time homogeneous cost setting in [113], OMG outperforms
the greedy heuristics in the case with a network. The improvement over the greedy cost is
more significant for the time inhomogeneous case. For both cases, the costs of OMG are
close to the upper bounds estimated using the sub-optimality bounds of the algorithm.
3.5.2 IEEE 14 Bus Case
The network data from IEEE 14 bus test system [123] are used for this example, with
modifications described as follows. Three conventional power plants are connected to the
network, i.e., a coal power plant with capacity 500MW and (constant) marginal genera-
tion cost 50$/MWh connected to bus 1, a nuclear power plant with capacity 450MW and
marginal generation cost 25$/MWh connected to bus 2, and a natural gas power plant with
capacity 400MW and marginal generation cost 100$/MWh is connected to bus 8.6 A wind
power plant is connected to bus 3. Hourly data of wind power generation for January 2004
(Figure 3.2) are obtained from the NREL dataset [80], and are scaled to model a 30% pene-
tration scenario. The hourly load data are obtained from PJM interconnection for the same
period (Figure 3.2), and are scaled down and then factored out according to the portion of
different load buses. Three storages are connected to buses 6, 7 and 10. Their capacities are
Smax6 = 300MWh, Smax
7 = 240MWh, Smax10 = 300MWh, and charging/discharging power
6The labeling of the buses are consistent with [123]

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 50
0 0.2 0.4 0.6 0.8 10
5
10
15
20
25
30
35
Total Smax in network
Percentagecost
savings(%
)
OMGGreedy
Upper bound
(a) Time homogeneous costs
0 0.2 0.4 0.6 0.8 10
5
10
15
20
25
30
35
Total Smax in network
Percentagecost
savings(%
)
OMGGreedy
Upper bound
(b) Time inhomogeneous costs
Figure 3.1: Percentage cost savings of a storage network operated for balancing.
ratings are Umax6 = Umax
7 = Umax10 = 10MW with Umin
n = −Umaxn for all n. For simplicity
(and in view of the fact that conversion to cluster based implementation is easy), we em-
ulate a complete distributed setting, where each node or each edge solves its own tasks in
the distributed ADMM algorithm.
The performance of OMG together with the greedy heuristic are simulated over T = 744
time periods (i.e., hourly for January 2004). We also compute the cost when there is no
storage in the system, and the offline clairvoyant optimal cost which corresponds to solving
the storage operation problem assuming the full knowledge of the future load and wind
ahead of time. For this example, the hourly average no storage cost is $51710. The costs
of the greedy heuristics, OMG, and offline optimal are 96.1%, 95.7% and 90.3% of the no
storage cost, respectively. Here the cost achieved by the offline optimal solution is a loose
lower bound as it requires information that is not available to the decision maker. The
stochastic lower bound, estimated by our algorithm under i.i.d. assumption is 94.6% of the
no storage cost. As the disturbances are not i.i.d., we expected the actual optimal cost to
lie between these two lower bounds.
The convergence of the fully distributed ADMM is shown in Figure 3.3. As a comparison,
we also plot the convergence of the projected subgradient method (SubGD). Figure 3.3a
shows the convergence of the objective values of the online program at a time period for
both algorithms with different algorithmic parameter choices, while Figure 3.3b depicts

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 51
the convergence of the norms of the primal residuals for the ADMM algorithm. For the
objective values, we observe that the convergence of ADMM is usually much faster compared
to SubGD. In fact, in all of our examples, SubGD does not converge after thousands of
iterations with the tolerance being 1 × 10−4. Comparing the performance of ADMM with
different parameter ρ’s, we note that smaller ρ leads to faster convergence of the objective
values but slower convergence of the primal residuals. Thus in practice, selecting a ρ that
properly trades off these two effects is necessary.
70
80
90
100
110
120
130
140
150
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Hour
Load(M
W)
0
10
20
30
40
50
60
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Hour
Wind(M
W)
Figure 3.2: Bar plots for scaled hourly total load (upper panel) and wind data (lower panel)used for the simulation.
3.5.3 Scalability
In this subsection, we give a preliminary account for the scalability of the distributed imple-
mentation using Matlab Distributed Computing Toolbox. Test results for larger networks
will be reported in the future. We consider star networks discussed in Subsection 3.5.1 with
the number of buses increasing from 2 to 16. We associate a processor to each of the buses,
and run the distributed ADMM using 2-16 processors. The running times of the distributed
ADMM implementation, together with the running times of solving the online programs
using the centralized ADMM algorithm, are shown in Figure 3.4. We note that while in
both scenarios, the running time increases approximately linearly with the number of buses,
the rate of the linear increase for distributed ADMM is significantly smaller. Loading the

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 52
0 100 200 300
0
0.5
1
1.5
2
2.5
3x 10
6
ADMM: ρ = 10
ADMM: ρ = 100
ADMM: ρ = 500
SubGD: ζk = 10−3/k
SubGD: ζk = 10−3/k0.5
SubGD: ζk = 10−3/k0.3
Objectivefunction
Iteration
(a) Objective value convergence
0 100 200 3000
20
40
60
80
100
120
ADMM: ρ = 10
ADMM: ρ = 100
ADMM: ρ = 500
Primalresidual
Iteration
(b) ADMM residual convergence
Figure 3.3: Convergence of ADMM and centralized subgradient method. Here ζk is the stepsize of the subgradient algorithm at the kth iteration.
data for problem specification and communication overheads may have contributed to the
linear running time increase for the distributed ADMM.
3.6 Conclusion and Future Directions
This chapter formulates the storage network operation problem as a stochastic control prob-
lem. An online algorithm is proposed to solve the problem efficiently. The performance of
the algorithm is analyzed and a sub-optimality bound is derived. The online programs
are then solved in a decentralized fashion with only local computation and neighborhood
communication with task-based ADMM iterations. Combining these elements, we obtain
an efficient task-based distributed online control strategy for operating distributed storage
systems under uncertainty with a guaranteed performance.
Many future directions are of interest for generalizing our results. (i) This chapter focuses
on the real power; incorporating the reactive power and a full AC power flow model may be
an important step towards a successful implementation in large-scale practical systems. As
the online optimization for each step becomes an AC optimal power flow (OPF) problem,
recent work on the convexification of such problems [68] [69] and on the distributed solution
of the convexified program [32] may be combined with the approach proposed in this chap-
ter. (ii) Our decentralized solution iroas based on the classical two block ADMM which has

CHAPTER 3. STOCHASTIC CONTROL OF DISTRIBUTED ENERGY STORAGE 53
ADMM with single processor
Fully distributed ADMM
Runningtime(second)
Number of nodes
15000
10000
5000
0
5 10 15
Figure 3.4: Running time of distributed and centralized ADMM
superior convergence properties compared to other popular methods for distributed opti-
mization such as primal or dual decomposition. Similar methods have been tested in much
larger networks for deterministic energy control problems [60]. However, the fact that such
an ADMM algorithm requires a two-block partition (corresponding to the node variables x
and edge variables z in Section 3.4.1) leads to the inconvenience that local copies of variables
controlled by the neighbors must be created. Multi-block variants of ADMM may eliminate
such need. However, the convergence is not guaranteed without additional assumptions
[28], [49], [45]. Validating these assumptions for specific storage control problem instances
may lead to simpler algorithm which has similar convergence properties. (iii) Utilizing the
sub-optimality bounds to assess the limit of the storage system for the purpose of storage
valuation and system design may also be of interest.

Chapter 4
Flexible Markets for Smart Grid
54

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 55
4.1 Introduction
The electric power grid increasingly relies on distributed and variable energy sources. In-
tegration of these new sources is helped by a market that facilitates matching intermittent
supply and flexible demand [104, 125]. Today the system operator (SO) achieves resource
adequacy, congestion management and efficiency through reserve requirements, day-ahead
(DA) and real-time (RT) markets, and centralized dispatch of standard energy commodities,
namely specified amount of energy delivered at specified nodes at fixed prices [59,111]. The
needs of important participants cannot be adequately expressed in terms of these standard
commodities, and so the SO allows bilateral contracts (e.g. Google [41], GM [2] and Ama-
zon [121]), with contractual arrangements that are not known to the SO. Over time, the
rigidity of the standard commodity was more broadly felt and fitful accommodations were
made by introducing new commodities, such as demand response, ramping, and capacity.
But given the legacy of the standard market this slow expansion of the SO’s responsibility
cannot unlock the full contractual flexibility that participants may wish. In particular, it
is challenging to repurpose today’s market design to serve the needs of distribution system
operators (DSOs) who must coordinate participants with small distributed generation and
controllable demand side devices, and who would benefit from differentiated micro-contracts
(i.e. contracts whose volumes are of the order of kWhs). Possible examples of such differen-
tiated contracts are (i) contracts for flexible amount of energy contingent on the realization
of uncertain supply or demand, (ii) contracts to serve deferrable loads that consume a fixed
amount of energy for (say) one hour but which could be scheduled for any hour of the day
[14,83], (iii) contracts that favorably price generation sources that are green or more flexible,
and (iv) contracts that encourage local sharing among prosumers with solar PV and storage
devices. Incorporating these differentiated contracts requires a significant deviation from an
electricity market with a small number of standard commodities.
In this chapter we propose a more flexible alternative to the current market design,
called coordinated multilateral trading. In this design, participants trade among themselves
according to terms and conditions fashioned to suit their own purposes like in today’s over
the counter markets (OTC), in contrast with exchanges for trading standardized commodi-
ties at transparent prices. These are contingent trades as the amount of energy delivered is
contingent on events or conditions specified in the contracts. Since the trades induce power
flow, they must be coordinated to ensure that network constraints are not violated. The SO
accomplishes this coordination task by curtailing trades if network constraints are violated,
and publishing information about the network state to guide participants regarding how
subsequent trades can avoid overloading congested lines. Thus the proposed market design
permits flexible contracts by allowing contingent trades while the SO maintains power sys-
tem security. In today’s design the SO computes an efficient dispatch that respects network
line constraints, but in the proposed design the SO is only concerned with reliability, and
the determination of an efficient dispatch is left to self-interested participants.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 56
4.1.1 Contributions and Organization
Coordinated trading of contingent contracts (described in Section 4.3) is proposed as a flex-
ible market mechanism in the context of electric power transmission system operation. We
establish that the trading process is well-defined and during each step of the process, power
system reliability is guaranteed though the role of the SO is greatly simplified. Furthermore,
we show that the trading process converges to an efficient dispatch, which meets a bench-
mark defined using social welfare maximization as in the centralized stochastic economic
dispatch (Section 4.4). We also show that this trading process discovers the optimal loca-
tional marginal prices through the marginal costs of local participants (Section 4.5). Finally,
we prove that the dispatch and prices identified from the trading process support an Arrow-
Debreu equilibrium, a notion of competitive equilibrium under uncertainty (Section 4.6).
The trading process is illustrated with a simple two-bus example in Section 4.7.
4.1.2 Related Literature
In studies of the standard electricity market the basic framework is a one- or two-settlement
market (Day Ahead Market or DAM and Real Time Market or RTM) in a deterministic
setting [5,34,48,74]. In this framework, generators and load serving entities present supply
and demand function bids to the system operator (SO); the SO then calculates the equi-
librium as the generation and load schedule that maximizes social welfare (producer plus
consumer surplus), subject to the constraint that flows on transmission lines are limited by
their rated capacities. This centralized calculation has the form of a mathematical program-
ming problem called the optimum power flow problem. The dual variables at the optimum
solution are called locational or nodal marginal prices or LMPs. The LMP at a node is the
marginal cost of delivering additional power at that node. In a two-settlement market there
are day ahead and real time LMPs.
In a stochastic context, uncertainty is modeled by a probability distribution over a set of
scenarios. Each scenario has its specific supply and demand functions, and the SO finds the
schedule that maximizes expected social welfare. This schedule is contingent, since there is
a different schedule for each scenario [18,29,43,77,93,116]. The complexity of the stochastic
problem grows in three ways with the number of scenarios. First, each demand and supply
bid now is a function of prices and scenarios, so the number of decision variables and LMPs
will be multiplied by the number of scenarios, thereby increasing the SO’s communication
and computational burden. Second, there must be agreement among all participants about
the probability distribution over the scenarios, which precludes heterogeneous beliefs or
private information that can affect beliefs. Third, participants must work out in advance
the bids they will offer for each scenario and price vector. This complexity has precluded
real world implementation of the optimal stochastic power flow problem. In the absence
of contingent (stochastic) bids that permit risk mitigation and reduce volatility, stochastic

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 57
perturbations in demand and supply may lead to the large variations in LMPs that are
observed.
Two studies propose decentralized trading processes to replace the SO’s centralized cal-
culation. In [27], transmission rights are privately owned; the SO specifies “marginal loading
factors” that is, the amount of capacity on every transmission line that must be purchased
by every proposed bilateral transaction. Transmission prices are adjusted iteratively in
steps as follows. At any step nodal price differences adjust to eliminate arbitrage profits
from purchasing energy at one node and selling at another. Given nodal prices, transmission
prices then are adjusted to increase rents, subject to the competitiveness condition that the
transmission price for a line with excess capacity must be zero. The iteration converges in
the limit to the welfare maximizing solution, and the nodal prices converge to the LMPs.
Our proposed design is closer to the decentralized multilateral trading process in [134]
and generalizes their trading process developed for single period deterministic electricity
market into a setting with two periods and with uncertainty explicitly considered. In
the multilateral trading process, groups of buyers and sellers propose to the SO a balanced
trade, i.e. sum of buy bids equals sum of sell bids. The SO accepts the trade if (together
with previously accepted trades) no transmission line constraint is violated. Otherwise, the
SO curtails the proposed trade until the violation is eliminated. No price is announced.
The understanding is that the private terms and conditions of a trade (including monetary
payments) are acceptable to all parties. As in [27] the SO announces loading vectors to
guide participants towards trades that do not violate line constraints. It is shown that in
case generators are motivated by profit maximization and buyers by utility maximization,
the process will converge to a social welfare maximum.
Two important distinctions between these decentralized processes are worth noting.
First, in the language of mathematical programming, [27] describes a dual method, whereas
[134] gives a primal method. It is possible that at each step the iteration in [27] is infeasible
except in the limit, whereas each step in [134] is feasible and the process may be stopped
at any point. Second, even though it is decentralized, the process in [27] is synchronized:
trades in each step must occur at the same time; but in [134] trades are asynchronous.
4.2 Formulation
4.2.1 Notation
For a natural number N , [N ] denotes the set 1, . . . , N. Let x ∈ RI×J be a matrix, with
entries denoted by xi,j , i ∈ [I], j ∈ [J ]. We use xi ∈ RJ to denote the vector (xi,j)j∈[J] and
xj ∈ RI to denote the vector (xi,j)i∈[I].

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 58
4.2.2 Network Model
Consider a power network with N buses and L power lines with capacity constraints. We
utilize the same linearized DC approximation to AC power flow introduced in Section 2.2.2
so the region of feasible nodal injections can be written as
P :=p ∈ RN : Hp ≤ f , 1⊤p = 0
. (4.1)
The first inequality in (4.1) models the line capacity constraints, while the second equality
enforces power balance over the entire network. We will denote the rows of H , referred to
as loading vectors or shift factors, by h⊤ℓ ∈ R1×N . Throughout the chapter, we assume that
P has a non-empty interior.
4.2.3 Uncertainty Model
We consider the operation of the electricity market over two time periods, the DA market
and the RT market.
We explicitly model the RT uncertainty as a finite collection of S system scenarios, so
each scenario is indexed by s ∈ [S] with probability P(s) > 0. We assume that the set of
scenarios and the probabilities are known to all market participants and the SO and the
realization of a scenario is publicly verifiable by all of them. We could have the set of feasible
injections P depending on the scenario as well to model transmission line failures, in which
case H and f in (4.1) will be indexed by scenario s. We do not do this to simplify the
notation.
4.2.4 Participant Model
On each bus of the network n ∈ [N ], there resides a collection of electricity market partic-
ipants denoted by In, each of which is either an electricity producer or an electricity load.
We model each market participant by her (or his) RT power injection plan, denoted by
pi = (pi,s)s∈[S], her local feasible power injection sets, denoted by Pi,s such that pi,s ∈ Pi,s
for all i ∈ In and s ∈ [S], and her von NeumannMorgenstern utility function over such a
plan, denoted by Ui(pi) and taking the form of
Ui(pi) = E[ui,s(pi,s)] =∑
s∈[S]
P(s)ui,s(pi,s), (4.2)
where ui,s(pi,s) is the actual utility given scenario s. Throughout the chapter, we assume
a quasi-linear environment, so that the utility function is linear in the amount of monetary
payment of each market participant, i.e.,
ui,s(pi,s) = mi,s(pi,s) + ui,s(pi,s), (4.3)

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 59
where mi,s(pi,s) is the payment received by the participant in scenario s and ui,s(pi,s) is
the utility associated with power injection pi,s as discussed in detail below. We will assume
that the utility function ui,s(·) is concave for each i ∈ I and s ∈ [S].
For an electricity producer, the power injection is induced by the producer’s possibly
scenario-dependent electricity production so that pi ∈ RS+. The feasible power injection sets
model the generation limits, which could be scenario dependent in the case of renewable
generation. Thus, we have Pi,s = [0, pi,s], where pi,s is the maximum possible power output
in scenario s. The utility function is as defined in (4.2) and (4.3), with
ui,s(pi,s) = −ci,s(pi,s), (4.4)
where ci,s(·) is the cost function of the generation plant.
For an electricity load, the power injection is induced by the possibly scenario-dependent
electricity consumption so that pi ∈ RS−. Symmetrically with the producer, we have Pi,s =
[−pi,s, 0], where pi,s is the maximum possible power demand in scenario s. The utility
function is taken to be
ui,s(pi,s) = bi,s(pi,s), (4.5)
where bi,s(·) characterizes the benefit of using power by the particular load. For large
loads (e.g. resellers), the benefit corresponds to the profit made from the given power
consumption; for small loads such as individual consumers, the benefit function reflects the
monetary value of consuming electricity and is a widely used device for modeling how power
consumption varies with prices [58, 106, 108]. Allowing the benefit function to be scenario
dependent is useful for modeling e.g. demand response resources whose availability is not
known a priori.
We partition the set In as In = IDAn ∪ IRTn such that IDA
n ∩ IRTn = ∅ and denote
IDA = ∪n∈[N ]IDAn and IRT = ∪n∈[N ]IRTn , where IDA
n contains producers/loads connected
to bus n whose power injection has to be fixed in DA and cannot adapt to RT scenarios
and IRTn are those that can adapt to RT scenarios. We refer to participants in IDA as DA
participants and those in IRT as RT participants. Technically, the power injection plan of
DA participants must satisfy the non-anticipation constraint
pi,s = pi,s, for all s, s ∈ [S]. (4.6)
To simplify the notation, let
Pi = pi ∈ RS : pi,s ∈ Pi,s, s ∈ [S], (4.7)
and
Pi =
Pi ∩ pi ∈ RS : pi,s = pi,s, s, s ∈ [S], i ∈ IDA,
Pi, i ∈ IRT.(4.8)

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 60
Examples of DA participants include power plants that cannot ramp up or down following
the RT uncertainty, such as coal-based generation plants, and loads that contract a fixed
amount of consumption in each hour in DA. RT participants can either be variable generation
sources or demand modeling e.g. renewable generation or random power consumption, or
controllable generation or demand that can adapt to RT scenarios, such as fast-ramping gas
generation or demand response resources.
4.2.5 Efficiency Benchmark
A commonly used criteria for economic efficiency is Pareto optimality. In a quasi-linear
environment, it is equivalent to the following stochastic social welfare maximization problem
max U(p) :=∑
i∈I
Ui(pi) (4.9a)
s.t. pi ∈ Pi, i ∈ I, (4.9b)
xn,s =∑
i∈In
pi,s, n ∈ [N ], s ∈ [S], (4.9c)
xs ∈ P , s ∈ [S]. (4.9d)
Notice that when the system does not take money from outside sources, we must have ex
post budget adequacy: ∑
i∈I
mi,s(pi,s) ≤ 0. (4.10)
If ex post budget balance holds, i.e.,∑
i∈I mi,s(pi,s) = 0, then the social welfare maximization
program (4.9) is equivalent to the stochastic economic dispatch problem with the objective
of (4.9) replaced by ∑
i∈I
Ui(pi) =∑
i∈I
E [ui,s(pi,s)], (4.11)
where the summation is the net sum of ex ante generation costs and load benefits as discussed
in the previous subsection.
4.3 Trading Process
The simplest market mechanism is one based on meeting and trading among self-interested
agents. The electricity market is different in that centralized coordination has been com-
monly considered essential to ensure power system reliability constraints (4.1). Indeed,
completely decentralized trading without coordination could lead to line flows that violate
their capacity limits and compromise the reliability of the system. As such, the standard

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 61
power system market designs rely on a centralized clearing house (or market maker), re-
ferred to as system operator (SO), to solve an economic dispatch optimization in order to
determine the generator schedules and electricity prices. When uncertainty from renewable
generation is considered, the resulting stochastic economic dispatch problem is computa-
tionally more complex and leads to increased communication requirement between the SO
and market participants.
Wu and Varaiya [134] propose a remarkably simple fix to make the free-market style
meet-and-trade procedure respect the power system reliability constraints (4.1). The idea
is to inject minimal amount of coordination, implemented by the SO, into the free trades
so that the reliability (or feasibility) is guaranteed in every step of the trading process as
shown in Figure 4.1. They also establish that the trading process achieves economic effi-
ciency in the limit. We will generalize their coordinated trading framework developed for
single period deterministic electricity market into a setting with two periods and with un-
certainty explicitly considered. Although we consider only a two-period market (consisting
of a forward market, i.e. DA, and a delivery period, i.e. RT) below, the analysis readily
extends to settings with multiple delivery periods.
Participants propose
an admissible trade
SO checks
feasibility
SO accepts the trade
SO accepts the
curtailed trade
SO updates the system state and announces
trading requirements
Repeat until convergence
Yes
No
Figure 4.1: Conceptual diagram for the trading process.
In this chapter, we consider a setting where all market participants trade exclusively
in DA. This means that during the DA market, each DA participant i ∈ IDA trades and
determines her power injection while each RT participant i ∈ IRT trades and determines
her contingent power injection plan. Since under the current setting with a complete DA
forward market, there is no need for RT re-trading, i.e., additional RT trading can not

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 62
improve social welfare, we assume that there is no trading in real time.
We start with definitions for the trading process. Given the abstract nature of some of
the definitions, examples demonstrating them are provided in Section 4.7 and linked here
in footnotes.
The premise of our trading system is that self-interested market participants will meet
and propose trades for their own benefits, very much like how today’s bilateral power pur-
chase contracts are formed. Thus the fundamental building block of such a system is the
notion of trade:
Definition 4.1 (Contingent trade). A contingent multilateral trade (referred to as trade in
the sequel)1 among a group Ik ⊂ I of participants, is a collection of power injection plans
pk = (pki,s)i∈Ik, s∈[S], (4.12)
that are feasible with respect to participants’ local constraints, i.e. pi ∈ Pi, and ex post
balanced so that ∑
i∈Ik
pki,s = 0, s ∈ [S]. (4.13)
For convenience, we also define pki,s = 0 for i 6∈ Ik, so that given pk we can infer Ik via
Ik = i ∈ I : there exists a s ∈ [S] s.t. pki,s 6= 0. (4.14)
This definition is convenient from the point of view of the SO. In practice, a trade is
a transaction that exchanges power with money. We will touch upon the money side of
the trading process in Section 4.5 and 4.6. The power balance condition is natural: the
amounts of power supplied and consumed must be equal in each scenario. This definition
also stresses that the commodity for sale is scenario-contingent power. That is, 1 MWh in
different scenarios of RT are treated as different commodities.
Some further remarks are in order for Definition 4.1.
Remark 4.1 (Need for multilateral trades). As indicated in Definition 4.1, a trade may
involve more than two market participants. Although multilateral trades are less common in
practice compared with bilateral trades, for our purpose, it is necessary to consider multilat-
eral trades so that the trading process is guaranteed to converge to an efficient dispatch. See
[134] for an example in which bilateral trading fails to converge to the optimal dispatch due
to loop externality [48]. When the network does not have cycles, it is possible to show that
bilateral trades suffice under certain conditions. See Appendix C.4.
Remark 4.2 (SO’s sufficient statistics). While market participants must keep track of their
own power injection plans, from the power system’s perspective, contingent (network) nodal
1See Table 4.1 in Section 4.7 for an example.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 63
injection vectors, calculated from
qkn,s =∑
i∈In
pki,s, n ∈ [N ], s ∈ [S], (4.15)
carry all the necessary information for checking the reliability constraints in (4.1). In par-
ticular, a trade among participants at the same node of network makes zero contribution to
the actual nodal injection and thus is not of concern to the SO.
Trades motivated by participants interests do not take into account power system re-
liability constraints. So it is necessary to have the SO verify that trades meet the power
system constraints, and in case of violation to curtail trades so that compliance is achieved.
Throughout the chapter, we consider a simple curtailment scheme:
Definition 4.2 (Uniform curtailment). A trade pk is said to be curtailed if only a portion of
the proposed power injection, γkpk, is accepted by the SO, where γk ∈ [0, 1) is the curtailment
factor and
(γkpk)i,s = γkpki,s, i ∈ Ik, s ∈ [S]. (4.16)
For notational convenience, we also define γk = 1 when a trade is accepted without curtail-
ment.2
Remark 4.3 (Scenario-dependent curtailment). The uniform curtailment scheme is the
simplest curtailment scheme that ensures local feasibility of curtailed trades given that the
initial trades satisfy local constraints. That is, given a trade pk such that pki ∈ Pi, i ∈ I,the curtailed trade always satisfies γkpki ∈ Pi, i ∈ I. It is possible to make the curtailment
scenario-dependent, i.e., for each scenario s ∈ [S], we can pick a different curtailment
factor γks ∈ [0, 1]. This curtailment scheme no longer has the local feasibility property if
DA participants are involved in the initial trade. In particular, the curtailed trade will not
satisfy non-anticipative constraints of DA participants if the curtailment factors for different
scenarios are taken to be different values. A hybrid of the uniform curtailment and scenario-
dependent curtailment is to use the former when a trade involves DA participants and to
use the latter when it does not. One can verify that all our results hold for this curtailment
scheme as well.
During the DA market time window, a sequence of trades will come up for SO’s approval.
Thus the notion of power system reliability and the calculation of curtailment depend on
trades that are already accepted into the system. We define a notion of system trading state
as follows:
Definition 4.3 (Trading state). Given a sequence of trades pκ and their curtailment factor
γκ, κ = 0, . . . , k − 1, the global trading state is the accumulated participants’ contingent
2Table 4.2 in Section 4.7 provides an example of a curtailed trade.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 64
power injection
yki,s =
k−1∑
κ=0
γκpκi,s, i ∈ I, s ∈ [S], (4.17)
and the network state for the SO is the accumulated network power injection
xkn,s =
k−1∑
κ=0
γκqκn,s =
k−1∑
κ=0
∑
i∈In
γκpκi,s, n ∈ [N ], s ∈ [S]. (4.18)
The network and trading states relate as
xkn,s =∑
i∈In
yki,s. (4.19)
Given the current system state xk, a characterization for a trade pk to be feasible for
network constraints (4.1) is that its corresponding network injection vector qk as defined in
(4.15) satisfies
xks + qks ∈ P , s ∈ [S]. (4.20)
Define the scenario-contingent feasible set of network injection as
Qs(xs) = P − xs = qs ∈ RN : xs + qs ∈ P, s ∈ [S], (4.21)
and Q(x) = Qs(x1)× . . .×QS(xS). Then (4.20) is equivalent to qk ∈ Q(xk).A potential issue of the trading process, in view of Definition 4.2, is that γk may have to
be 0 to bring many trades back to feasible. Indeed, if the market participants are proposing
trades without any information regarding the current network state xk, then it is likely that
many trades overburdening lines which are already congested at xk will be proposed. To
forestall such a possibility, the SO requires participants to only submit trades that are in
the feasible direction of the network given the current state.
Definition 4.4 (Feasible direction trade). Given a network state xk, let Ls(xks ) be the set
of active (binding) line constraints in scenario s, that is,
Ls(xks ) = ℓ ∈ [L] : h⊤ℓ xks = fℓ, s ∈ [S]. (4.22)
Then a trade pk is a feasible-direction (FD) trade at xk if its corresponding network injection
qk as defined in (4.15) satisfies
h⊤ℓ qks ≤ 0, ℓ ∈ Ls(xks ), s ∈ [S]. (4.23)
If market participants are constrained to propose only FD trades, then it is guaranteed
that γk > 0 so that every trade updates the network state. At this moment, it is unclear
whether such update is favorable in any sense. Formalizing the notion of “self-interested”

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 65
participants, we have the following definition.
Definition 4.5 (Worthwhile trade). We call a trade pk an ǫ-worthy trade at trading state
yk if it leads to welfare improvement no smaller than ǫ, i.e.,
∑
i∈Ik
Ui(yki + pki )− Ui(y
ki ) ≥ ǫ, (4.24)
and an ǫ-unworthy trade if (4.24) does not hold. A profitable trade is an ǫ-worthy trade with
ǫ = 0.
Notice that if an ǫ-worthy trade is proposed by some participants and accepted by the SO,
then it improves the social welfare by at least ǫ as the power injection plans of participants
not involved in the trade are not changed.
We can now formalize the coordinated trading process.
Step 1. Initialization. The SO initializes the system state xk corresponding to some initial
feasible trade pk, k = 0.
Step 2. Announcement. The SO checks the congestion state of the system at xk, identifies
Ls(xks ) for s ∈ [S] and announces the network loading vectors hℓ, ℓ ∈ Ls(xks ) for
each s ∈ [S].
Step 3. Trading. If a profitable trade3 in the feasible direction pk is identified, participants
arrange it. If no profitable trade is found, go to Step 6.
Step 4. Curtailment. If pk is not feasible, i.e., the corresponding network injection qk is
such that qk 6∈ Q(xk), the SO curtails the trade with
γk = maxγ : γqk ∈ Q(xk)
∈ (0, 1). (4.25)
If pk is feasible, set γk = 1.
Step 5. Update. The SO updates the network state as xk+1 ← xk + γkqk, k ← k+1. Go to
Step 2.
Step 6. Termination.
It is evident from the description of the trading process that the SO only has the following
responsibilities. (i) SO checks whether the trade newly submitted by participants is feasible
with respect to network constraints. If not, it curtails the trade so that the resulting trade is
feasible. (ii) In case there are congested lines, the SO computes and broadcasts the loading
vectors to the participants. Note that in our framework, the SO does not carry out any
3We refer to the resulting trading process as an ǫ-trading process when the requirement of profitabletrade is replaced by ǫ-worthy trade.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 66
optimization. Instead, market participants seek to optimize their own profit during the
trading process.
Remark 4.4 (Feasibility). An important feature of the trading process is that the proposed
system state xk for any k is feasible with respect to the power network constraints. Thus
even if the trading process is stopped at any stage before termination, the trades still result
in a safe power flow solution.
Remark 4.5 (Pay-as-bid settlement). The trading process allows a pay-as-bid payment
settlement approach. Immediately after submitting the trade, the market participants are
informed whether their trades will be scheduled (or partially scheduled if curtailed); this
information can then be used to calculate and settle the payment among these participants.
Comparing to the locational pricing used in the standard market, such a payment settlement
process could limit the price risk faced by market participants which are expected to increase
when the system integrates more renewables. This is also part of the reason why bilateral
long-term contracts are widely used by large utility companies and power producers.
4.4 Economic Efficiency
Similar to arguments in [134], one can verify that trading process described in the previous
subsection is well-defined, and whenever a ǫ-worthy trade is identified (ǫ > 0), the social
welfare is strictly increased (even if the trade is to be curtailed). Thus when the trading
process terminates, that is, when there exists no additional profitable trade that is not yet
arranged, one may expect that the resulting power injection plan matches the economic
efficiency benchmark defined by stochastic optimization problem (4.9).
Theorem 4.1 (Efficiency). Suppose the following assumptions are in force:
(i) for any fixed ǫ > 0, any ǫ-unworthy trade in the feasible direction will not be arranged
and any ǫ-worthy trade will eventually be identified and arranged, and
(ii) once a worthy profitable trade is identified, the market participants involved are willing
to carry it out.
Then the ǫ-trading process is well-defined and the accumulated global trading state yk con-
verges in the sense that
U⋆ − limk→∞
U(yk) ≤ ǫ, (4.26)
where U⋆ is the optimal value of (4.9).
Proof. See Appendix C.1.
When ǫ is sufficiently small, Theorem 4.1 states that the trading process will converge
to a dispatch that is practically optimal for any desired accuracy. The key message of
Theorem 4.1 is that the extremely simple feedback procedure of the SO based on curtailment

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 67
and loading vector announcement suffices in providing coordination for the trades so that
efficiency is achieved while network reliability is guaranteed in every iteration of the trading
process.
Remark 4.6 (Trade formation). Like in [134], we purposely leave the details of trading
group formation open. Theorem 4.1 is powerful in that it is agnostic to the actual underlying
mechanism dictating which subset of participants meet and propose trade k. For instance,
a conceptually simple mechanism is that in every iteration k, a subset of I is picked at
random such that there is a positive probability for picking every subset4. If it is possible
for this group of participants to identify a profitable trade in the feasible direction, they will
propose it, as in Step 3 of the trading process. If not, we can simply continue this process by
generating another random group of participants. Since there is a finite number of subsets of
I, Theorem 4.1 guarantees that this process converges to an efficient dispatch with probability
one. In practice, trading group formation processes depend on a lot of factors that we do
not model in this chapter. As a result, it could be the case that each participant i ∈ Imay only have access to a small subset of other participants in the market. An important
future research direction is to design information platforms that facilitate trade discovery
and reduce search cost.
Remark 4.7 (Profit allocation). Similarly, we do not specify how profit is allocated among
the participants if a profitable trade is proposed and accepted by the SO. One can verify (or
cf. [134]) that for every profitable trade, there is a profit allocation that makes all involving
participants better off.
Remark 4.8 (Merchandising surplus). In the standard market, the total payment collected
from loads is larger than that paid to generators when there are line congestions. This
merchandising surplus [135] is paid to transmission owners. In our setting, as the SO does
not collect money from participants and all trades are budget balanced, separate payment
streams might be needed to cover the costs of the transmission owners. Possible ways include
charging a fee for using the transmission or requiring participants to acquire transmission
rights for making trades across the network.
Remark 4.9 (Algorithmic interpretation). The trading process may be thought of as a
projected line search algorithm for solving (4.9), whose iteration k performs update
yk+1 = yk + γkpk, (4.27)
where pk is the search direction and γk is the step length introduced to project the step into
the feasible region. The algorithm is distributed, in that the search direction is identified
based on information (and objective functions) of a subset of participants. The algorithm is
4We can e.g. first sample a random group size Ik from [|I|] and then randomly sample a group from Iof size Ik.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 68
special as its search direction pk is identified from a profitable trade, which is an economic
construct, rather than based on gradient or Hessian of the objective function.
Remark 4.10 (Subjective probability). In general, different market participants may have
their own subjective assessment of the probabilities of the scenarios. Denote the subjective
probabilities of participant i ∈ I by Pi(s), s ∈ [S]. Then yk converges to an optimal solution
of (4.9) with the ex ante utility function replaced by
Ui(pi) = Ei[ui,s(pi,s)] =∑
s∈[S]
Pi(s)ui,s(pi,s). (4.28)
In this case, the resulting dispatch is Pareto optimal but may not maximize the ex ante social
welfare as the latter notion is defined upon the unknown true probability distribution of the
uncertainty.
Remark 4.11 (Distribution system operator). The trading process also offers a way to
design a lightweight or minimal distribution system operator (minDSO) for coordinating
distributed generation (DG), flexible loads and other distribution level resources. With
minDSO, the DG owners and demand side flexibility providers do not need to report cost
and benefit data to the minDSO; so long as they can determine profitable trades among
themselves, social welfare will improve. To adapt our formulation to the distribution system
setting, the linearized DistFlow model[6,7] provides an accurate model of the real power flow
on the distribution network. Line capacity and transformer limits can be modeled similarly
as transmission line limits. The tree network topology offers potential simplification to the
trading process (see Appendix C.4). Voltage constraints can be modeled as additional lin-
ear constraints [39]. Distribution topology switching can be accommodated by updating the
network constraint set P according to the current switch states.
4.5 Price Discovery
In standard markets, the SO solves an economic dispatch problem that determines both
the dispatch and the locational marginal prices of power at all buses. When uncertainty is
considered, the computationally demanding stochastic economic dispatch must be solved by
the SO.
The trading process, on the contrary, does not require the SO to solve any optimization
problem. Theorem 4.1 suggests that an efficient dispatch is achieved in the limit; here
we show that the optimal locational marginal prices also emerge when the trading process
converges5. The idea is simple. Suppose that in the last few minutes of the DA trading
window, when the trading process has already converged, a new load comes into the system
5An alternative treatment, involving setting up trade-based prices and characterizing the convergence ofthe price process, is also possible (cf. [27, 71]). However, this requires a detailed specification of paymentsassociated with each trade which we avoid in this chapter.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 69
and demands a ǫ → 0 unit of power at bus n for scenario s. Producers who can still
generate additional power could each quote a price based on their marginal cost evaluated
at the current trading state. We thus discover the locational marginal price at bus n for
scenario s by finding the minimum price announced by those generators that can indeed
send power to bus n given the congestion state in the scenario.
To formalize this idea, denote the optimal dual variable associated with constraint (4.9c)
by λ⋆n,s, n ∈ [N ], s ∈ [S]. Furthermore, as constraint (4.9b) for RT participants is a box
constraint, denote the optimal dual variables associated with the lower and upper bounds
by η⋆i,s
and η⋆i,s, respectively. Notice that the trading process has a balanced budget by
construction, as the system operator is not involved in any financial aspect of the system.
Therefore, problem (4.9) is equivalent to the stochastic economic dispatch problem.
Lemma 4.1 (Price discovery). For each bus n ∈ [N ] and s ∈ [S], if there exists a participant
i ∈ IRTn whose utility function is differentiable and whose optimal contingent power injection
p⋆i,s is in the interior of her local feasible set, i.e., p⋆i,s ∈ Pi,s, then we have6
λ⋆n,s = −P(s)∂ui,s(p
⋆i,s)
∂pi,s. (4.29)
In general, suppose the utility function of some participant i ∈ IRTn is differentiable, then
λ⋆n,s = −P(s)∂ui,s(p
⋆i,s)
∂pi,s+ (η⋆i,s − η⋆i,s). (4.30)
Proof. See Appendix C.2.
While the price calculation based on (4.29) is intuitive and only requires local informa-
tion, that based on (4.30) may require solving the dual program of (4.9) to identify the
values of the optimal dual variables η⋆i,s and η⋆i,s. Fortunately, solving for the dual program
is greatly simplified when the optimal primal solution p⋆ is known (cf. [22]).
4.6 Arrow-Debreu Equilibrium
Section 4.4 established that the trading process converges to a stationary contingent power
injection plan p⋆. Section 4.5 then showed that there is a well-defined notion of price λ⋆
that emerges alongside with the stationary injection plan. Here we connect the pair (p⋆, λ⋆)
to the suitable economic concept of general equilibrium under uncertainty. Taken together,
this will formally establish that the contingent trading process converges to a (contingent
plan, price) equilibrium, which respects the power system reliability constraints and achieves
economic efficiency.
6The sign convention is that pi,s > 0 represents power injection (supply) into the network. Thus if ui,s
is a utility function that in the usual sense is increasing with demand, λ⋆n,s as computed below will be
nonnegative.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 70
To start, we need to define an electricity market economy, similar to that done in [18]
(also see [128]). The commodities of the economy is contingent power at each node n ∈ [N ]
and in each scenario s ∈ [S]. Buying (selling) a unit contingent power (n, s) in DA leads
to the right to consume (responsibility to generate) a unit of power at node n if scenario s
occurs in RT.
The market participants are those in I as defined in Section 4.2.4 and a traditional
system operator7 who may convert power at one node into that at another node using the
network.
For each participant i ∈ I, given prices for contingent power λ, the following optimization
is solved to determine the participant’s contingent power injection plan
max∑
s∈[S]
λn,spi,s + P(s)ui,s(pi,s) (4.31a)
s.t. pi ∈ Pi, (4.31b)
where λn,s is the price at node n faced by i ∈ In. Here the objective function is the same
as Ui(pi) as defined in (4.2) with linear payment scheme
mi,s(pi,s) = λn,spi,s, (4.32)
where λn,s = λn,s/P(s). Notice that the first term in the summation in (4.31a) is the
monetary payment that clears in DA; the second term is the expected utility derived from
the power injection in RT.
The SO is modeled as a firm that uses technology (i.e. power network) to convert one
type of commodity (i.e. contingent power on one node) to other types of commodities (i.e.
contingent power on other nodes), in order to maximize its profit. Formally, the SO solves
the following optimization to determine the contingent network power injection x given
prices for contingent power λ:
max∑
s∈[S]
∑
n∈[N ]
−λn,sxn,s (4.33a)
s.t. xs ∈ P , s ∈ [S], (4.33b)
where the entire profit of SO in (4.33a) is cleared in DA.
The suitable notion of competitive equilibrium of such a market for contingent claims
is that of Arrow-Debreu, which generalizes the Walrasian concept of general equilibrium to
settings with uncertainty [72]. Here we state the definition of Arrow-Debreu equilibrium for
the electricity market economy:
7This notion of SO is consistent with that in the literature and different from the SO described inSection 4.3.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 71
Definition 4.6 (Arrow-Debreu equilibrium). A collection of contingent power injection
plans (p⋆, x⋆), with p⋆ ∈ R|I|×S and x⋆ ∈ RN×S and a system of prices for contingent power
λ⋆ ∈ RN×S constitute an Arrow-Debreu equilibrium if:
(i) For every i ∈ I, p⋆i solves (4.31) given prices λ⋆.
(ii) For the SO, x⋆ solves (4.33) given prices λ⋆.
(iii) The market for each contingent power commodity clears:
x⋆n,s =∑
i∈In
p⋆i,s, n ∈ [N ], s ∈ [S]. (4.34)
By the first fundamental theorem of welfare economics and in a quasi-linear environment,
we expect that a dispatch-price tuple (p⋆, x⋆, λ⋆) at an Arrow-Debreu equilibrium achieves
economic efficiency defined by (4.9) (cf. [10, 72]). Our previous result suggests that the
dispatch at the limit of the trading process together with the emerged prices matches the
solution of (4.9). Our next result establishes that the dispatch-price tuple obtained from
the trading process indeed constitutes an Arrow-Debreu equilibrium.
Lemma 4.2. Suppose that an Arrow-Debreu equilibrium exists and that the utility functions
are differentiable. Then the contingent power injection plan p⋆ obtained from the trading
process, the corresponding network injection plan x⋆ calculated from (4.9c), and the prices
computed from (4.29) or (4.30) constitute an Arrow-Debreu equilibrium.
Proof. See Appendix C.3.
Remark 4.12 (Tatonnement process). In light of Lemma 4.2, the trading process can
be thought of as a way to drive an out-of-equilibrium market into its equilibrium. Such
processes, characterizing the dynamic laws of out-of-equilibrium movement of the market
state, is in general referred to as a tatonnement process; see [44].
4.7 Examples
We provide an illustrative example for the trading process in this section.
Consider a two bus network depicted in Figure 4.2. There are 3 generators and 1 load
connected to the system. We list the relevant data for the participants as follows
• G1 is a coal power plant that can generate up to 200 MW at a constant marginal cost
50 $/MW. It can only be scheduled in the DA stage due to its lead time.
• G2 is a wind farm that generates 100 MW in the first scenario (windy scenario) and
50 MW in the second scenario (breezy scenario) at no operational cost. Suppose there
are only these two scenarios for the system and one of them is realized at the delivery
time. The underlying probabilities for these two scenarios are 0.6 and 0.4, respectively.

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 72
• G3 is a gas power plant that can ramp up rapidly at real time with 100 MW capacity
and constant marginal cost of 80 $/MW.
• Load represents an inelastic power consumption of 150 MW.
G1
Load
Limit = 120
G2
G3
p1
p2
p3
p4
Figure 4.2: Network diagram for the two-bus example.
For the purpose of illustrating the interaction between market participants and the PSO,
in this example we assume that in each iteration all four participants meet and propose a
trade with no knowledge of the network constraint. In DA, as an example, the participants
could solve the following optimization problem to identify the cost minimization trade
minimize 50p1 + E [80p3,s] = 50p1 + 48p3,1 + 32p3,2
subject to p1 + p2,s + p3,s + p4 = 0, s = 1, 2,
p4 = −150,0 ≤ p1 ≤ 200,
0 ≤ p3,s ≤ 100, s = 1, 2,
0 ≤ p2,1 ≤ 100, 0 ≤ p2,2 ≤ 50,
where the optimization variables are the day-ahead scheduled coal power generation p1, the
real-time gas power generation p3,s corresponding to the two scenarios, and wind power
generation corresponding to the two scenarios p2,s (which is controllable up to curtailment).
Upon solving this linear program, the participants propose its solution as their initial trade
to the SO, which is shown in Table 4.1.
Table 4.1: Power injection (unit: MW) of the initial trade proposed by the particpants.
Scenario G1 G2 G3 Load
Windy 50 100 0 -150Breezy 50 50 50 -150
This trade is not feasible with respect to the line limit in the windy scenario. As such,
the SO curtails the trade to the one shown in Table 4.2 with γ = 0.8. The SO also announces
the loading vector such that the constraints (4.23) can be expressed as ∆p1+∆p2,s−∆p3,s−∆p4 ≤ 0, where ∆p’s are the corresponding changes in the power injections, and s = 1, 2

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 73
as the line limit constraint is binding for both scenarios. The participants then solve the
following program to identify a profitable trade in the feasible direction:
Table 4.2: Power injection (unit: MW) of the curtailed trade.
Scenario G1 G2 G3 Load
Windy 40 80 0 -120Breezy 40 40 40 -120
minimize 50(p1+∆p1)+48(p3,1+∆p3,1)+32(p3,2+∆p3,2)
subject to ∆p1 +∆p2,s +∆p3,s +∆p4 = 0, s = 1, 2,
∆p1 +∆p2,s −∆p3,s −∆p4 ≤ 0, s = 1, 2,
p4 +∆p4 = −150,0 ≤ p1 +∆p1 ≤ 200,
0 ≤ p3,s +∆p3,s ≤ 100, s = 1, 2,
0 ≤ p2,1+∆p2,1 ≤ 100, 0 ≤ p2,2+∆p2,2 ≤ 50,
where the p’s are the curtailed trade given in Table 4.2. The resulting accumulated trade
γp + ∆p is shown in Table 4.3. The trading process would terminate now as there is no
profitable feasible direction trade can be further identified. One can easily verify that the
accumulated trade coincides with the solution to (4.9) for this example, and therefore the
trading process indeed achieves efficiency.
Table 4.3: Power injection (unit: MW) of the accumulated trade γp+∆p.
Scenario G1 G2 G3 Load
Windy 20 100 30 -150Breezy 20 50 80 -150
4.8 Concluding remarks and open questions
Contingent coordinated trading is proposed as a market framework for power system re-
source allocation under uncertainty. Within the framework, the economic efficiency is
achieved via coordinated trades proposed by any groups of market participants for their
own benefit. The trading process also discovers the optimal contingent locational marginal
prices, and supports an Arrow-Debreu equilibrium of the market. Allowing the trades to be
contingent on properly defined system scenarios greatly enhances the flexibility of the trades
and could result in an improvement of social welfare compared to standard deterministic
dispatch based market clearing. The role of the SO is minimal in our framework as the SO

CHAPTER 4. FLEXIBLE MARKETS FOR SMART GRID 74
only monitors the trades, curtails them if necessary, and does not collect any cost data or
directly intervene in economic decisions. As such, all suppliers and consumers have open
access to the power network, which promotes competition and expedites the processes of
new generation and consumer-side technology adoption.
We envision that the proposed framework could help address many challenges in design-
ing new DSOs for distribution systems with deep distributed energy resource penetration.
Given the novelty of the proposed framework, it is natural that this chapter leaves a variety
of fundamental questions open.
• Uncertainty model. In practice, it is unlikely that we can obtain an exact charac-
terization of all possible scenarios for the entire system in DA. Thus extending our
ideal uncertainty model by incorporating information updates could make the trading
framework more realistic. Under such settings, it may become advantageous to allow
RT re-trading as the realized RT scenario may not be exactly one of the pre-scribed
scenarios in DA. Additionally, even if it is possible to characterize the set of all pos-
sible scenarios, the total number of scenarios may be very large due to the fact that
many scenarios are local (see Appendix C.5 for a model where all scenarios are local).
Thus in practice, suitable factorization (decomposing the scenario tree into system
wide scenarios and local scenarios) or scenario reduction is necessary for successful
market design based on the proposed trading framework.
• Trade implementation. As all trades happen before real time, in real time, the partic-
ipants need to supply and consume according to the scheduled trades. To ensure this
indeed happens, advance metering infrastructure (AMI) systems and suitable financial
incentive (or penalty) scheme have to be in place. Thus an open question is how to
design such financial schemes that encourage consistent participant behaviors while
limits potential gaming activities.
• Trade formation. For distribution system applications, requiring participants to meet
and trade seems overwhelming. A more likely setting is to rely on one or many third-
party marketplaces to identify profitable trades on behalf of (subsets of) the partic-
ipants. Our analysis also applies to such settings thanks to our general assumption
on the trade formation process. In this context, our results are better understood as
a form of separation principle, which ensures lossless separation of network reliability
from market efficiency considerations with our trading framework. Under such sepa-
ration, third party marketplaces can fill the role of trade identification and formation
without any explicit knowledge of the power network, as long as it follows the rules
set by the SO. Designing and implementing such third-party marketplaces to unlock
potentials from distributed energy resources and flexible loads thus is an important
future direction to explore.

Chapter 5
Conclusions
In this thesis, we first analyze a simple greedy strategy for the planning problem of placing
energy storage in power network. Using structural characterizations of the underlying power
network control problem, we identify conditions under which the placement value function
is submodular so that the greedy strategy has a performance guarantee. We then develop
a computational procedure to certify these conditions for any given problem instance based
on multi-parametric programming.
In the second part of the thesis, we consider the stochastic control problem for operating
energy storage devices connected in a power network. As the exact solution of the problem
based on dynamic programming suffers from the curse of dimensionality, we propose a
simple online algorithm for the problem utilizing a stabilized greedy (myopic) controller.
For a rather general setting, we establish performance guarantees for the proposed method.
Finally, we study fundamental requirements for power network reliability in designing
novel power markets to integrate DERs. We demonstrate a transaction or trading based
market, on top of a system operator implementing these reliability requirements, could
achieve the same efficiency as centralized dispatch. We also obtain structural results for
radial networks which indicate efficient market outcome can be reached with bilateral trading
for distribution networks.
75

Appendix A
Appendices of Chapter 2
76

APPENDIX A. APPENDICES OF CHAPTER 2 77
A.1 Expression of the Shift Factor Matrix
For the directed graph G(N ,L) representing the power network, the node-edge incidence
matrix A ∈ RN×L is defined as
An,ℓ =
1 if ℓ→ n,
−1 if ℓ← n,
0 otherwise,
where ℓ → n denotes that n is the head of ℓ, and ℓ ← n denotes that n is the tail of ℓ.
Under the classical DC approximation to the steady-state AC power flow [112], the lines are
characterized by their reactance and real power flow capacity f ∈ RL. Let Y ∈ RN×N be
the network admittance matrix, which can be represented as
Y = A∆yA⊤,
where ∆y ∈ RL×L is the diagonal matrix with the ℓth diagonal element being yℓ > 0 which
is the reciprocal of the reactances of the line. Note that rank(Y ) = N − 1. Taking bus 1 to
be the reference bus, we let Y ∈ R(N−1)×(N−1) be the sub-matrix of Y which contains all
the entries of Y except its first row and first column. Let
Y † ,
[0 0
0 Y −1
]
be the constrained generalized inverse of Y . For each time period t = 1, . . . , T , we can then
relate the line flows ft ∈ RL with the nodal power injection pt ∈ RN using a linear map
H ∈ RL×N :
ft = Hpt, with H , ∆yA⊤Y †.
Then we have
H ,
[I
−I
]H ∈ R2L×N , f ,
[f
f
]∈ R2L,
and constraint Hpt ≤ f captures the flow constraints for the power network.
A.2 Proof of Proposition 2.1
Proof. As the objective function of (2.11) is strongly convex in λ, we know that λ⋆(x)
must be unique. Suppose that the first bus is the reference bus of the network, then by
the definition of the shift-factor matrix, H11 = 0. Thus constraint (2.11b) implies that
γ⋆t (x) = λ⋆1,t(x), and therefore γ⋆(x) is also unique. Under Assumption 2.1, the set of
primal flow constraints (2.4b) that are binding at the optimal solution is given by those

APPENDIX A. APPENDICES OF CHAPTER 2 78
corresponding to Ht. That is, βt can be partitioned into βt for the binding constraints and
β′t for the slack constraints for which we know that β′
t = 0 by complementary slackness. In
fact, using this decomposition, the dual constraint (2.11b) can be written as
λt = γt1−Hnett
⊤βt, t ∈ T .
Now as Hnett is a full row rank matrix, βt is uniquely determined by the equation above
given fixed λt and γt. This implies that βt is also unique.
A.3 Proof of Lemma 2.1
Proof. Consider the primal program (2.4), which has an infinitely differentiable objective
function and linear constraints. Under the non-degeneracy condition, we can apply standard
sensitivity theorem of nonlinear programming [70], which suggests the differentiability of
J(x) and that
∂J(x)
∂xn= −
T∑
t=1
µ⋆n,t = −
T∑
t=1
(λ⋆n,t+1(x) − λ⋆n,t(x)
)+,
for any i ∈ N . To show that ∂J(x)/∂xn itself is again a continuous function, we observe that
λ⋆(x) is the unique solution of the dual QP (2.7). By the smoothness of the objective and
constraints of (2.7), we know that the parameter to solution mapping λ⋆(x) is continuous
in x. Furthermore, the positive part function (·)+ is a continuous function from R to R+.
Therefore, we conclude that ∂J(x)/∂xn is continuous and J(x) is continuously differentiable.
As ∂J(x)/∂xn ≤ 0, the function J(x) is nonincreasing in xn for each i ∈ N .
A.4 Proof of Lemma 2.2
Proof. We write the primal problem (2.4) as
J(x) = ming
T∑
t=1
Ct(gt) + ω(g, x),
where extended real-valued function ω(g, x) is defined to be 0 if, given (g, x), there exists a
control u satisfying all the constraints of (2.4), and +∞ otherwise. Let x1, x2 ∈ Rn+ be two
arbitrary vectors of storage capacities, and let (g1, u1) and (g2, u2) be the optimal primal
solutions associated with x1 and x2 respectively. We claim that the function ω(g, x) is convex
in (g, x). Indeed, it is easy to verify that, for ρ ∈ [0, 1], ω(ρg1+(1−ρ)g2, ρx1+(1−ρ)x2) = 0
if ω(gi, xi) = 0 for i = 1, 2, as ρu1 +(1− ρ)u2 is a feasible solution for the set of constraints
given (ρg1 + (1 − ρ)g2, ρx1 + (1 − ρ)x2). Therefore, J(x) is convex as it is the minimum
value of another convex function optimized in g over a convex set.

APPENDIX A. APPENDICES OF CHAPTER 2 79
A.5 Proof of Theorem 2.1 and Corollary 2.1
Proof. By strict complementary slackness,
βℓ,t = 0 if ℓ 6∈ LCt and βℓ,t > 0 if ℓ ∈ LCt .
Thus, we can focus on the reduced dual variable
βt , znett βt ∈ RLt , t = 1, . . . , T.
For convenience, we denote
ξn,t =(zstn,t
)+, ηn,t = 1zstn,t = 0, n ∈ N , t ∈ T .
Then we can consider the following reduced form of dual program (2.7) in a neighborhood
of the given storage capacity vector x
maxλ,γ,β
ψ(λ, γ, β) (A.1)
s.t. λt = γt1−Hnett
⊤βt, t ∈ T , (A.2)
F (ηt)(λt+1 − λt) = 0, t ∈ T , (A.3)
where the objective function is
ψ(λ, γ, β) ,T∑
t=1
− 1
2(λt − rt)⊤Q−1
t (λt − rt) + d⊤t λt − f⊤t βt − x⊤∆ξt(λt+1 − λt),
ft , znett f , and matrix F (ηt) ∈ Rmt×N , (mt =∑
n∈N ηn,t), is formed by removing zero
rows from diagonal matrix ∆ηt. We can vectorize the variables and coefficients by denoting
λ =
λ1...
λT
, β =
β1...
βT
, γ =
γ1...
γT
, r =
r1...
rT
, d =
d1...
dT
, f =
f1...
fT
,
and define matrices
Q = diag(Q1, . . . , QT ) ∈ RNT×NT ,
G = diag(1, . . . ,1) ∈ RNT×T ,
H = diag(Hnet1 , . . . , Hnet
T ) ∈ R(∑
t∈TLt)×NT ,

APPENDIX A. APPENDICES OF CHAPTER 2 80
F =
−F (η1) F (η1)
−F (η2) F (η2)
. . .. . .
−F (ηT−1) F (ηT−1)
−F (ηT )
∈ R(∑
t∈Tmt)×NT .
Then the optimization can be written as
maxλ,γ,β
− 1
2(λ− r)⊤Q−1(λ − r) + κ⊤λ − f⊤β
s.t. λ = Gγ −H⊤β,
Fλ = 0,
where
κ = d− Y x,
and
Y =
−∆ξ1
∆ξ1 −∆ξ2
...
∆ξT−1 −∆ξT
.
We can reduce the variable λ using constraint λ = Gγ −H⊤β, as a result, we get
maxγ,β
− 1
2(Gγ −H⊤β − r)⊤Q−1(Gγ −H⊤β − r) + κ⊤(Gγ −H⊤β)− f⊤β
s.t. F (Gγ −H⊤β) = 0.
Converting this to the standard form of QP, we have
minγ,β
1
2
[γ
β
]⊤ [G⊤Q−1G G⊤Q−1H⊤
HQ−1G HQ−1H⊤
]
︸ ︷︷ ︸,A
[γ
β
]−[
G⊤κ+G⊤Q−1r
−Hκ−HQ−1r − f
]
︸ ︷︷ ︸,B
⊤ [γ
β
]+
1
2r⊤Q−1r
s.t.[FG −FH⊤
]
︸ ︷︷ ︸,C
[γ
β
]= 0.
This is a standard equality constrained QP. Given the uniqueness of the prices (Proposi-
tion 2.1), we can use the formula for the solution of standard equality constrained QP and
conclude that [γ
β
]=
(A−1C⊤(CA−1C⊤)−1)CA−1 −A−1
)B.

APPENDIX A. APPENDICES OF CHAPTER 2 81
Substituting this expression into λ = Gγ −H⊤β, we get
λ =[G −H⊤
] (A−1C⊤(CA−1C⊤)−1)CA−1 −A−1
)B.
Notice that as B is affine in κ, which is an affine function of the storage capacities x, the
resulting prices γ, β and λ are affine functions of the storage capacities. Substituting the
definition of B and κ, we obtain expression for Wt(znet, zst), λt(z
net, zst), Bt(znet, zst) and
βt(znet, zst), for t ∈ T .
A.6 Proof of Theorem 2.2
Proof. We can compute the optimal value J by substituting the expression of the optimal
γ and β, as a result
J(x) =1
2B⊤
(A−1 −A−1C⊤(CA−1C⊤)−1)CA−1
)B − 1
2r⊤Q−1r.
Recognizing that
B =
[G⊤
−H
]κ+
[G⊤Q−1r
−HQ−1r − f
]=
[G⊤
−H
](d − Y x) +
[G⊤Q−1r
−HQ−1r − f
],
we obtain the Hessian for critical region containing x being
∇xxJ(x) = Y ⊤[G −H⊤
] (A−1 −A−1C⊤(CA−1C⊤)−1)CA−1
)[G⊤
−H
]Y .
A.7 Proof of Theorem 2.3
Proof. For any X ⊆ Ω, and without loss of generality ei , (i, ki) 6∈ X , ej , (j, kj) 6∈ X , we
have DeiV (X) = V (X ∪ (i, ki))− V (X) and
Dej(Dei
V (X)) = [V (X ∪ (i, ki), (j, kj))− V (X ∪ (j, kj))]− [V (X ∪ (i, ki))− V (X)].
Let x0 , I(X)x. Using the definition of V , we have
Dej(Dei
V (X)) =[J(x0 + xj1j)− J(x0 + xi1i + xj1j)
]− [J(x0)− J(x0 + xi1i)].
Since J(x) is continuously differentiable, the following integral expression is well-defined:
Dej(Dei
V (X)) =
∫ xi
0
[∂J
∂xi(x0 + ξ1i)−
∂J
∂xi(x0 + xj1j + ξ1i)
]dξ.

APPENDIX A. APPENDICES OF CHAPTER 2 82
Meanwhile, given that ∂J/∂xi is differentiable almost everywhere with respect to Lebesgue
measure, we have
Dej(Dei
V (X)) = −∫ xi
0
∫ xj
0
∂2J
∂xj∂xi(x0 + ξ1i + ζ1j) dζ dξ.
As(∇2
xxJ(x))ij≥ 0, we have Dej
(DeiV (X)) ≤ 0 for any i, j ∈ N and any ki and kj . Thus,
using (2.20), we conclude that the set function V is submodular.
A.8 Proof of Lemma 2.4
Proof. By the proof of Theorem 2.1 and Corollary 2.1, we know that (λ⋆(x), γ⋆(x), β⋆(x)) is
a stationary point of the objective of the dual QP (A.1). In other words, (λ⋆(x), γ⋆(x), β⋆(x))
is the unconstrained local maximizer of (A.1) in an affine subspace defined by the set of
equality and inequality constraints in (A.1) which are binding at x. Recall that, given the
storage congestion state zst ∈ RN×T , the objective function of (A.1) can be written as
φ(λ, β) =
T∑
t=1
−1
2(λt − rt)⊤Q−1
t (λt − rt) + d⊤t λt − f⊤βt − x⊤∆ξt(λt+1 − λt).
Now consider a vector x that satisfies the inequality conditions in Theorem 2.4. The first two
inequality conditions ensure that, at x, the storage congestion state zst(x) given by (2.13) is
unchanged from zst(x). Therefore, (λ⋆(x), γ⋆(x), β⋆(x)) is still the unconstrained local max-
imizer of (A.1) in the same affine subspace when x is replaced with x in the above expression
of the objective function φ. The last inequality condition in Theorem 2.4 guarantees that
(λ⋆(x), γ⋆(x), β⋆(x)) is feasible for (A.1). Indeed, we observe from the expression of β⋆t (x)
in (2.17) that modifying x does not affect β⋆ℓ,t(x) for a line ℓ that is uncongested and hence
β⋆ℓ,t(x) is 0 if line ℓ is uncongested, while the second inequality condition in Theorem 2.4
ensures that β⋆ℓ,t(x) remains positive if line ℓ is congested. Therefore, (λ⋆(x), γ⋆(x), β⋆(x))
must be a global maximizer of the dual QP (A.1) because the problem is concave. By strict
complementary slackness, the conditions defining Rx ensure that the set of binding inequal-
ity constraints is unaltered with x. This implies that Rx is the critical region containing x.
A.9 Proof of Theorem 2.5
Proof. Since submodularity is preserved through addition, E[V (X ; d)] is submodular. On
the other hand, ρ is nonincreasing and convex since it is a convex risk measure. We now
use the fact that the composition of a nonincreasing convex function and a nondecreas-
ing submodular function is nonincreasing supermodular [120]. Therefore, we observe that
ρ(V (X ; d)) is nonincreasing supermodular. Finally, we again use the fact that submodular-
ity is preserved through addition to conclude that E[V (X ; d)]−κρ(V (X ; d)) is nondecreasing

APPENDIX A. APPENDICES OF CHAPTER 2 83
submodular for any κ ≥ 0.

Appendix B
Appendices of Chapter 3
84

APPENDIX B. APPENDICES OF CHAPTER 3 85
B.1 Definitions and Expressions for Section 3.3
Here we provide the define mathematically the parameters used by the algorithm, including
Dcn, Dcn, Γminn , Γmax
n and Wmaxn . We start by defining Dcn and Dcn for each n ∈ [N ].
Definition B.1. Let yn , (f, δn, pn). For function φn(un, yn) , cn(un−δn+∑N
n′=1 fnn′ , pn)
that is convex (but not necessarily differentiable) in un, a real number αn is called a
(partial) subgradient of φn with respect to argument un at given (un, yn) if φn(u′n, yn) ≥
φn(un, yn) + αn(u′n − un) for all u′n ∈ [Umin
n , Umaxn ]. The set of all subgradients at (un, yn),
denoted by ∂unφn(un, yn), is called the (partial) subdifferential of φn(un, yn) with respect
to un at (un, yn). Denote Un , [Uminn , Umax
n ], Yn , F × [δminn , δmax
n ] × [Pminn , Pmax
n ] where
F =f : −Fmax
nn′ ≤ fnn′ ≤ Fmaxnn′ , ∀n, n′ ∈ [N ]
. Define the set
Dcn ,⋃
(un,yn)∈×Un×Yn
∂unφn(un, yn),
and let real numbers Dgn and Dgn be defined such that
Dcn ≤ inf Dcn ≤ supDcn ≤ Dcn. (B.1)
That is, Dcn and Dcn are a lower bound and an upper bound of the sub-gradient of φn over
its (compact) domain, respectively.
More details and examples regarding how to calculate Dcn and Dcn can be found in our
previous work [97]. The bounds for the algorithmic parameters are
Γminn ,
1
λn(−WnDcn + Umax
n − Smaxn ) , (B.2)
Γmaxn ,
1
λn
(−WnDcn − Smin
n + Uminn
), (B.3)
and
Wmaxn ,
(Smaxn − Smin
n )− (Umaxn − Umin
n )
Dcn −Dcn. (B.4)
B.2 Proof of Theorem 3.1
Similar to the analysis in [97] for the single bus storage case, we will prove Theorem 3.1 via
the following steps:
1. Reformulate problem (3.6) and link it to the sequence of OMG online optimizations
(3.4).
2. Prove that the control policy obtained from OMG is feasible to problem (3.6).
3. Derive the performance bound in Theorem 3.1.

APPENDIX B. APPENDICES OF CHAPTER 3 86
First, we proceed by reformulating problem (3.6). For n = 1, . . . , N , define
un , limT→∞
1
TE
[T∑
t=1
un,t
], sn , lim
T→∞
1
TE
[T∑
t=1
sn,t
].
Note that for sn,1 ∈ [Sminn , Smax
n ],
un = limT→∞
1
TE
[T∑
t=1
sn,t+1 − λnsn,t]= (1 − λn)sn.
As sn,t ∈ [Sminn , Smax
n ] for all t ≥ 0, the above expression implies
(1− λn)Sminn ≤ un ≤ (1 − λn)Smax
n .
Problem (3.6) can be equivalently written as follows
P1: min limT→∞
1
TE
T∑
t=1
N∑
n=1
cn(gn,t; pn,t) (B.5a)
s.t. δn,t + gn,t = un,t +
N∑
n′=1
fnn′,t, (B.5b)
sn,t+1 = λnsn,t + un,t, (B.5c)
Sminn − λnsn,t ≤ un,t ≤ Smax
n − λnsn,t, (B.5d)
Uminn ≤ un,t ≤ Umax
n , (B.5e)
(1− λn)Smin ≤ un ≤ (1− λn)Smaxn (B.5f)
Ynn′(θn,t − θn′,t) = fnn′,t, (B.5g)
− Fmaxnn′ ≤ fnn′,t ≤ Fmax
nn′ , (B.5h)
where bounds on sn,t are replaced by (B.5d), and (B.5f) is added without loss of optimality.
Here we use JP1(u, g, θ, f) to denote the objective value of P1 with operation sequence
(u, g, θ, f) (as an abbreviation of ut, gt, θt, ft : t ≥ 1), Λ⋆(P1) = (u⋆(P1), g⋆(P1), θ⋆(P1),
f⋆(P1)) to denote the optimal control sequence for P1, J⋆P1 , JP1(Λ
⋆(P1)), and we define
similar quantities for P2. Here P2 is an auxilliary problem we construct to bridge the
infinite horizon storage control problem P1 to online optimization problems (3.4). It has
the following form
P2: min limT→∞
1
TE
T∑
t=1
N∑
n=1
cn(gn,t; pn,t) (B.6a)
s.t. δn,t + gn,t = un,t +N∑
n′=1
fnn′,t, (B.6b)

APPENDIX B. APPENDICES OF CHAPTER 3 87
Uminn ≤ un,t ≤ Umax
n , (B.6c)
(1− λn)Sminn ≤ un ≤ (1− λn)Smax
n (B.6d)
Ynn′(θn,t − θn′,t) = fnn′,t, (B.6e)
− Fmaxnn′ ≤ fnn′,t ≤ Fmax
nn′ . (B.6f)
Notice that it has the same objective as P1, and evidently it is a relaxation of P1. This
implies that u⋆(P2) may not be feasible for P1, and
J⋆P2 = JP1(Λ
⋆(P2)) ≤ J⋆P1. (B.7)
The reason for the removal of state-dependent constraints (B.5d) (and hence (B.5c) as the
sequence st : t ≥ 1 becomes irrelevant to the optimization of ut : t ≥ 1) in P2 is that the
state-independent problem P2 has easy-to-characterize optimal stationary control policies.
In particular, from the theory of stochastic network optimization [84], the following result
holds.
Lemma B.1 (Stationary disturbance-only policies). Under Assumption 3.1 there exists a
stationary disturbance-only policy Λstat,t = (ustatt , gstatt , θstatt , f statt ) satisfying the constraints
in P2 and providing the following guarantees ∀t:
(1− λn)Sminn ≤ E[ustatn,t ] ≤ (1 − λn)Smax
n , ∀n ∈ [N ]
E
[N∑
n=1
cn(gn,t; pn,t)
∣∣∣∣∣Λstat,t
]= J⋆
P2,
where the expectation is taken over the randomization of δn,t, pn,t, and possibly Λstat,t in
case the policy is randomized.
Recall the online optimization solved by OMG:
P3: min
N∑
n=1
(λn/Wn)(sn + Γn)un + cn(gn; pn) (B.8a)
s.t. Uminn ≤ un ≤ Umax
n , (B.8b)
δn + gn = un +
N∑
n′=1
fnn′ , (B.8c)
Yn′n(θn′ − θn) = fn′n, (B.8d)
− Fmaxn′n ≤ fn′n ≤ Fmax
n′n . (B.8e)
We use Λol,t = (uolt , golt , θ
olt , f
olt ) to denote the solution of P3 at time step t, Λ⋆(P3) =
(u⋆(P3), g⋆(P3), θ⋆(P3), f⋆(P3)) to denote the sequence Λol,t : t ≥ 1, JP3,t(Λt) to
denote the objective function of P3 at time period t using policy Λt, and J⋆P3,t to denote

APPENDIX B. APPENDICES OF CHAPTER 3 88
the corresponding optimal cost.
Now, we turn to the feasibility analysis of Λ⋆(P3) with respect to P1. Following as-
sumption holds for any storage system that is controllable.
Assumption B.1 (Feasibility and Controllability). Each storage n ∈ [N ] is feasible and
controllable:
• (feasibility) starting from any feasible storage level, there exists a feasible storage opera-
tion such that the storage level in the next time period is feasible, i.e., λnSminn +Umax
n ≥Sminn and λnS
maxn + Umin
n ≤ Smaxn .
• (controllability) starting from any feasible storage level, there exists a sequence of fea-
sible storage operations to reach any feasible storage level in a finite number of steps,
i.e., λnSmaxn + Umax
n ≥ Smaxn and λnS
minn + Umin
n ≤ Sminn .
In order to prove that the solution of P3 is feasible to P1, we have the following technical
lemma.
Lemma B.2. At each time period t, the optimal storage operation of P3 at node n, uoln,t,
for n = 1, . . . , N , satisfies
1. uoln,t = Uminn whenever λnsn,t ≥ −WnDcn,
2. uoln,t = Umaxn whenever λnsn,t ≤ −WnDcn,
where
sn,t = sn,t + Γn.
Proof. The proof follows from similar arguments used to prove Lemma 3 of [97]. Details are
omitted for brevity.
We are ready to prove the feasibility of the control sequence generated by the algorithm.
Proof of Theorem 3.1, feasibility. For any n = 1, . . . , N , we first validate that the intervals
of Γn and Wn are non-empty. By A3 of Assumption 3.1, one concludes Wmaxn > 0, thus it
remains to show Γmaxn ≥ Γmin
n . Based on (B.4), Wn ≥ 0, and Dcn ≥ Dcn, one obtains
Wn(Dcn −Dcn) ≤ [(Smaxn − Smin
n )− (Umaxn − Umin
n )].
Re-arranging terms results in
−WnDcn + Umaxn − Smax
n ≤ −WnDgn − Sminn + Umin
n ,
which further implies Γmaxn ≥ Γmin
n .
We proceed to show that
Sminn ≤ sn,t ≤ Smax
n , (B.9)

APPENDIX B. APPENDICES OF CHAPTER 3 89
for t = 1, 2, . . . and any n ∈ [N ], when Λ⋆(P3) is implemented. The base case holds by
assumption. Let the inductive hypothesis be that (B.9) holds at time t. The storage level
at t + 1 is then sn,t+1 = λnsn,t + uoln,t. We show (B.9) holds at t + 1 by considering the
following three cases.
Case 1. −WnDcn ≤ λnsn,t ≤ λn(Smaxn + Γn).
First, it is easy to verify that the above interval for λnsn,t is non-empty using (B.2) and
Γn ≥ Γminn . Next, based on Lemma B.2, one obtains uoln,t = Umin
n ≤ 0 in this case. Therefore
sn,t+1 = λnsn,t + Uminn ≤ λnSmax
n + Uminn ≤ Smax
n ,
where the last inequality follows from Assumption B.1. On the other hand,
sn,t+1 = λnsn,t + Uminn ≥ −WnDcn − λnΓn + Umin
n
≥−WnDcn − λnΓmaxn + Umin
n ≥ Sminn ,
where the third inequality used Dcn ≥ Dcn.Case 2. λn(S
minn + Γn) ≤ λnsn,t ≤ −WnDcn.
The above interval for λnsn,t is non-empty by (B.3) and Γn ≤ Γmaxn . Lemma B.2 implies
uoln,t = Umaxn ≥ 0 in this case. Therefore, again using Assumption B.1,
sn,t+1 = λnsn,t + Umaxn ≥ λnSmin
n + Umaxn ≥ Smin
n .
On the other hand,
sn,t+1 = λnsn,t + Umaxn ≤ −WnDcn − λnΓn + Umax
n
≤−WnDcn − λnΓminn + Umax
n ≤ Smaxn ,
where the third inequality used Dcn ≥ Dcn.Case 3. −WnDcn < λnsn,t < −WnDcn.
By Uminn ≤ uoln,t ≤ Umax
n , one obtains
sn,t+1 = λnsn,t + uoln,t ≤ λnsn,t + Umaxn
<−WnDcn − λnΓn + Umaxn
≤−WnDcn − λnΓminn + Umax
n ≤ Smaxn .
On the other hand,
sn,t+1 = λnsn,t + uoln,t ≥ λnsn,t + Uminn
>−WnDcn − λnΓn + Uminn
≥−WnDcn − λnΓmaxn + Umax
n ≥ Sminn .

APPENDIX B. APPENDICES OF CHAPTER 3 90
Combining these three cases, and by mathematical induction, we conclude (B.9) holds
for all t = 1, 2, . . . .
It remains to show that the sub-optimality bounds claimed in Theorem 3.1 indeed hold.
Proof of Theorem 3.1, performance. Consider a quadratic Lyapunov function Ln(sn) = s2n/2.
Let the corresponding Lyapunov drift be
∆n(sn,t) = E [Ln(sn,t+1)− Ln(sn,t)|sn,t] .
Recall that sn,t+1 = sn,t+1 + Γn = λsn,t + un,t + (1− λn)Γn, and so
∆n(sn,t)
= E
[(1/2)(un,t + (1− λn)Γn)
2 − (1/2)(1− λ2n)s2n,t + λnsn,tun,t + λn(1− λn)sn,tΓn|sn,t]
≤Mun (Γn)− (1/2)(1− λ2n)s2n,t +E
[λnsn,tun,t + λn(1− λn)sn,tΓn|sn,t
]
≤Mun (Γn) +E [λnsn,t(un,t + (1− λn)Γn)|sn,t] .
It follows that, with arbitrary Λt = (ut, gt, θt, ft),
∆n(sn,t)
Wn+E[cn(gn,t; pn,t)|sn,t]
≤ Mun (Γn)
Wn+λn(1 − λn)sn,tΓn
Wn+E
[λnsn,tun,t
Wn+cn(gn,t; pn,t)|sn,t
].
By summing the above expression over n = 1, . . . , N ,
N∑
n=1
∆n(sn,t)
Wn+E[cn(gn,t; pn,t)|sn,t] ≤
N∑
n=1
Mun (Γn)
Wn+λn(1− λn)sn,tΓn
Wn+E
[JP3,t(Λt)|st].
where it is clear that minimizing the right hand side of the above inequality over Λt is
equivalent to minimizing the objective of P3. Since Λstat,t, the disturbance-only stationary
policy of P2 described in Lemma B.1, is feasible for P3, then the above inequality implies
N∑
n=1
∆n(sn,t)
Wn+E[cn(gn,t; pn,t)|sn,t,Λol,t]
≤N∑
n=1
Mun (Γn)
Wn+λn(1− λn)sn,tΓn
Wn+E
[J⋆P3,t|st]
≤N∑
n=1
Mun (Γn)
Wn+λn(1−λn)sn,tΓn
Wn+E
[JP3,t(Λ
stat,t)|st]
(a)=
N∑
n=1
Mun (Γn)
Wn+λnsn,tE
[ustatn,t + (1− λn)Γn
]
Wn+
N∑
n=1
E[cn(gn,t; pn,t)|Λstat,t)]

APPENDIX B. APPENDICES OF CHAPTER 3 91
(b)
≤N∑
n=1
Mn(Γn)
Wn+E[cn(gn,t; pn,t)|Λstat,t]
(c)
≤N∑
n=1
Mn(Γn)
Wn+ J⋆
P1.
Here (a) uses the fact that ustatt is induced by a disturbance-only stationary policy; (b)
follows from inequalities
|sn,t| ≤(max
((Smax
n + Γn)2, (Smin
n + Γn)2))1/2
and ∣∣E
[ustatn,t
]+ (1− λn)Γn
∣∣ ≤ (1 − λn)(max((Smaxn + Γn)
2, (Sminn + Γn)
2))1/2;
and (c) used E[∑N
n=1 cn(gn,t; pn,t)|Λstat,t] = J⋆P2 from Lemma B.1 and J⋆
P2 ≤ J⋆P1. Taking
expectation over st on both sides gives
E
[N∑
n=1
cn(gn,t; pn,t)|Λol,t
]+
N∑
n=1
E [Ln(sn,t+1)− Ln(sn,t)]
Wn≤
N∑
n=1
Mn(Γn)
Wn+ J⋆
P1. (B.10)
Summing expression (B.10) over t from 1 to T , dividing both sides by T , and taking the
limit T →∞, we obtain the performance bound in expression (3.7).
B.3 Derivation of the ADMM Algorithm
The first step in deriving the ADMM iterations for the reformulated problem (3.9) is to
form the augmented Lagrangian function as follows:
Lρ(x, z, µ, ν)
=
n∑
n=1
qn(xn) + µ⊤n (fn,L(n) − fL(n)) +
ρ
2‖fn,L(n) − fL(n)‖22
+m∑
ℓ=1
hℓ(zℓ) + ν⊤ℓ (θℓ,N (ℓ) − θN (ℓ)) +ρ
2‖θℓ,N (ℓ) − θN (ℓ)‖22,
where µn ∈ R|L(n)| and νℓ ∈ R|N (ℓ)| are dual variables for constraints (3.9b) and (3.9c),
respectively, and ρ > 0 is a parameter. The centralized ADMM iterates are then
xk+1 = argminx
Lρ(x, zk, µk, νk), (B.11a)
zk+1 = argminz
Lρ(xk+1, z, µk, νk), (B.11b)
µk+1n = µk
n + ρ(fk+1n,L(n) − fk+1
L(n)), ∀n ∈ [N ], (B.11c)
νk+1ℓ = νkℓ + ρ(θk+1
ℓ,N (ℓ) − θk+1N (ℓ)), ∀ℓ ∈ [L], (B.11d)

APPENDIX B. APPENDICES OF CHAPTER 3 92
where k is the iteration count. Let ηn = µn/ρ for all n and ξℓ = νℓ/ρ for all ℓ be the scaled
dual variables. Then upon recognizing that updates (B.11a) and (B.11c) are separable across
all nodes, and that updates (B.11b) and (B.11d) are separable across all edges, we obtain
the following distributed ADMM iterates:
xk+1n = argmin
xn
qn(xn) +ρ
2‖fn,L(n) − fk
L(n) + ηkn‖22 +∑
ℓ∈L(n)
ρ
2(θkℓ,n − θn + ξkℓ,n)
2, ∀n ∈ [N ],
zk+1ℓ = argmin
zℓ
hℓ(zℓ) +ρ
2‖θℓ,N (ℓ) − θk+1
N (ℓ) + ξkℓ ‖22 +∑
n∈N (ℓ)
ρ
2(fk+1
n,ℓ − fℓ + ηkn,ℓ)2, ∀ℓ ∈ [L],
ηk+1n = ηkn + fk+1
n,L(n) − fk+1L(n), ∀n ∈ [N ],
ξk+1ℓ = ξkℓ + θk+1
ℓ,N (ℓ) − θk+1N (ℓ), ∀ℓ ∈ [L].
The observation that the message passing scheme proposed indeed facilitates the local com-
putation completes this derivation.
Proof of Lemma 3.2. Based on the derivation above, it is easy to check that the iterations
given above implement the standard two block ADMM with x and z being the (two-block)
primal variables, and (µ, ν) be the dual variable for the linear equality constraints. The
convergence analysis of [21] applies directly. The linear convergence rate follows from e.g.
[47] and [49].

Appendix C
Appendices of Chapter 4
93

APPENDIX C. APPENDICES OF CHAPTER 4 94
C.1 Proof of Theorem 4.1
We prove Theorem 4.1 by first establishing a more general version of the result for opti-
mization of the form
maximize U(p) (C.1a)
subject to Ep = 0, (C.1b)
Dp ≤ d, (C.1c)
pi ∈ Pi, i ∈ [m], (C.1d)
and then show that Theorem 4.1 is a special case. Here the decision variables are pi ∈ Rn,
i ∈ [m] so that p ∈ Rmn, constraint matrices E ∈ Rr1×mn and D ∈ Rr2×mn are such that
p : Ep = 0, Dp ≤ d is a closed compact subset of Rmn, local feasible sets Pi, i ∈ [m] are
closed, compact and convex subsets of Rn, where n,m, r1 and r2 are positive integers.
For each ǫ > 0, we consider an iterative algorithm for solving (C.1) of the following form:
given y0 ∈ Rmn feasible for (C.1), the iterations are generated by a point-to-set mapping
Aǫ : Rmn 7→ 2R
mn
. That is,
yk+1 ∈ Aǫ(yk), k ∈ Z+. (C.2)
We consider a specific algorithmic mapping that is a composition of two mappings: Aǫ =
CFǫ. Here the point-to-set mapping Fǫ : Rmn 7→ Rmn × 2R
mn
is defined such that (y′, p) ∈Fǫ(y) if y
′ = y and
p ∈ Gǫ(y) =
p ∈ Rmn :
Ik ⊂ [m], pi = 0, i 6∈ Ik,yi + pi ∈ Pi, i ∈ Ik,Ep = 0, D(y)p ≤ 0,
U(y + p)− U(y) ≥ ǫ
, (C.3)
where D(y) is the matrix containing rows of D corresponding to binding constraints at y.
The point-to-point mapping C : Rmn × Rmn → Rmn is defined such that C(y, p) = y + γp
where
γ = maxγ ∈ (0, 1] : D(y + γp) ≤ d. (C.4)
The convergence theorem that we wish to establish is formally stated as follows.
Lemma C.1. Suppose U is concave and problem (C.1) has a solution and its feasible set
has a nonempty interior. Denote the optimal value of (C.1) by U⋆. Then for any given
feasible y0, any process ykk∈Z+generated by algorithmic mapping Aǫ in the sense of (C.2)
has objective values U(yk)k∈Z+such that
U⋆ − limk→∞
U(yk) ≤ ǫ. (C.5)

APPENDIX C. APPENDICES OF CHAPTER 4 95
Notice that in (C.2), any point in the set Aǫ(yk) can be picked as yk+1, and thus
Lemma C.1 is asserting a form of convergence for a family of an infinite numbers of processes
ykk∈Z+. A classical result concerning with this type of convergence is Zangwill’s global
convergence theorem [139] (also see [70]):
Theorem C.1. Let A be an algorithm on set X , and suppose that starting from x0 the
sequence xkk∈Z+is generated satisfying xk+1 ∈ A(xk). Let a solution set X ⋆ ⊂ X be
given, and suppose
1. all points xk are contained in a compact set S ⊂ X ,
2. there is a continuous function U on X such that (i) if x 6∈ X ⋆, then U(y) > U(x) for
all y ∈ A(x), and (ii) if x ∈ X ⋆, then U(y) ≥ U(x) for all y ∈ A(x),
3. the mapping A is closed at points outside of X ⋆.
Then the limit of any convergent subsequence of xkk∈Z+is in X ⋆.
The proof of Lemma C.1 amounts to checking conditions in the theorem above for
solution set P⋆ǫ which are feasible points p for (C.1) such that U⋆ − U(p) ≤ ǫ.
Proof of Lemma C.1. The objective function U is concave, hence continuous. The feasible
set of (C.1) is an intersection of closed, compact, and convex sets and is also closed, compact
and convex. It remains to show that the sequence ykk∈Z+is feasible and ascent, and the
mapping Aǫ is closed.
(a) The sequence ykk∈Z+is feasible for constraints of (C.1).
The initial point y0 is feasible by assumption. Suppose that yk is feasible. As pk ∈Gǫ(y
k), we have Epk = 0 and so E(yk + γpk) = 0 for any γ. Therefore Eyk+1 = 0. We
also have Dyk+1 ≤ d by the definition of γ in (C.4). (Notice that a nonzero γ exists as the
feasible set of (C.1) has nonempty interior.) Finally, yk+1i = yki + γpki ∈ Pi since y
ki ∈ Pi,
yki + pki ∈ Pi and Pi is convex. Thus yk is feasible for all k by induciton.
(b) The sequence U(yk)k∈Z+is nondecreasing for yk 6∈ P⋆
ǫ .
By the last condition in the definition of set Gǫ, we have U(yk + pk) − U(yk) ≥ ǫ > 0.
As γ ∈ (0, 1] and U is concave, we have U(yk + γpk)− U(yk) > 0.
(c) The mapping Aǫ is closed.
As the feasible set is closed, it suffices to prove that the graph of Aǫ is closed. That is,
for any sequence (zk, yk)k∈Z+with limit (z, y) such that zk ∈ Aǫ(y
k), we need to show
that z ∈ Aǫ(y). It is easy to check that zi ∈ Pi as the set Pi is closed for each i. We
thus proceed to show that the search direction defined by p = z − y always satisfies linear
constraints Ep = 0 and D(y)p ≤ 0. Indeed, the equality constraint holds by continuity of
the linear mapping. Suppose that the inequality constraint D(y)p ≤ 0 does not hold. Then
there exists a constraint, say the ℓth constraint, binding at y, i.e., D⊤ℓ y = dℓ such that

APPENDIX C. APPENDICES OF CHAPTER 4 96
D⊤ℓ p = δ > 0, where Dℓ is the ℓth row of matrix D. By yk → y and D⊤
ℓ y = dℓ, there exists
a natural number K1 such that for all k ≥ K1,
D⊤ℓ y
k ≥ dℓ − δ/4. (C.6)
Meanwhile, by yk → y and zk → z, there exists a natural number K2 such that for all
k ≥ K2,
D⊤ℓ (z
k − yk) ≥ δ/2 > 0. (C.7)
It follows that for all k ≥ max(K1,K2), we have
D⊤ℓ z
k ≥ D⊤ℓ y
k + δ/2 ≥ dℓ + δ/4 > dℓ, (C.8)
contradicting to the fact zk is feasible as proved in item (a), as zk ∈ Aǫ(yk).
It remains to show that there exists a η ∈ [1,∞) such that the search step before
applying the mapping C (curtailment), p = η(z − y) is ǫ-worthy. Suppose otherwise, then
for all η ∈ [1,∞),
U(y + η(z − y))− U(y) ≤ ǫ1 < ǫ. (C.9)
As U is continuous, yk → y and zk → z, there exists a K3 such that for all k ≥ K3,
U(yk + η(zk − yk))− U(yk) ≤ ǫ2, ǫ2 ∈ (ǫ1, ǫ), (C.10)
contradicting to zk ∈ Aǫ(yk). Therefore z ∈ Aǫ(y) and so Aǫ is closed.
Proof of Theorem 4.1. We first recognize that (4.9) is a special case of (C.1), with n = S,
m = |I|, Ep = 0 modeling the power balance constraints, Dp ≤ d modeling the line capacity
constraints. We further notice that the ǫ-trading process (see footnote 3) is algorithm (C.2)
with matrices E and D suitably defined. Invoking Lemma C.1 suggests that for any ǫ > 0,
the trading state process ykk∈Z+is such that U⋆ − limk→∞ U(yk) ≤ ǫ and therefore the
claim in Theorem 4.1 follows.
Remark C.1 (Trading process for distributed optimization). Given the general form of
optimization (C.1) and per Lemma C.1, the trading process and its algorithmic correspon-
dence (C.2) define a framework for solving distributed optimization problems. Different from
popular algorithms such as coordinate descent [86] and ADMM [21], which iterate among
coordinates with well-defined update order, the trading process would converge by updating
some subsets of the coordinates (pairs of coordinates in the case of tree network or for net-
work flow problems as discussle ed in Appendix C.4) according to any order, as long as
conditions in the algorithmic mapping (C.2) are met. Another distinct feature of the trad-
ing process is that it does not specify a search direction for each update; it permits any
search direction corresponding to a trade with suitable economic incentives (ǫ-worthy trade)

APPENDIX C. APPENDICES OF CHAPTER 4 97
thus allows a great flexibility for designing platforms or systems in which agents could trade
freely for their own benefits with an essential amount of coordination in place to ensure
global constraints are satisfied.
C.2 Proof of Lemma 4.1
Writing the Lagrangian of (4.9) and taking derivative with respect to pi,s for some RT
participant i gives
Pi(s)∂ui,s(p
⋆)
∂pi,s+ λn,s − (ηi,s − ηi,s) = 0. (C.11)
Thus (4.30) follows from this first order condition. When it is known that p⋆i,s ∈ Pi,s, we
have η⋆i,s = η⋆i,s
= 0 by complementary slackness, and so equation (4.29) holds in this case.
C.3 Proof of Lemma 4.2
Consider the optimization of participant i at bus n. The local constraint pi ∈ Pi can be
expressed as
pi≤ pi ≤ pi,
pi =1
S11⊤pi, if i ∈ IDA, (C.12)
where the second constraint is the vector form of pi,s = 1S
∑Ss=1 pi,s, a convenient way
to express the non-anticipation constraint. Let the dual variables for these constraints be
denoted ηi∈ RS , ηi,s ∈ RS and ζi ∈ RS , respectively. Then the optimality condition for
(4.31) is
λn,spi,s + Pi(s)∂ui,s(pi,s)
∂pi,s− (ηi,s − ηi,s)
− (1s −1
S1)⊤ζi1i∈IDA = 0, (C.13a)
pi≤ pi ≤ pi, (C.13b)
pi =1
S11⊤pi, if i ∈ IDA, (C.13c)
ηi, ηi ≥ 0, (C.13d)
where 1i∈IDA = 1 if i ∈ IDA and 0 otherwise.
Now consider the optimization for SO. Denote the dual variable for power balance con-
straint by γs ∈ R and the dual variable for flow constraint by βs ∈ RL, s ∈ [S]. Then the

APPENDIX C. APPENDICES OF CHAPTER 4 98
optimality condition is
λn,s + γs + (H⊤βs)n = 0, n ∈ [N ], s ∈ [S], (C.14a)
1⊤xs = 0, s ∈ [S], (C.14b)
Hxs ≤ f, s ∈ [S], (C.14c)
βs ≥ 0, s ∈ [S]. (C.14d)
Collecting optimality conditions (C.13) for all i ∈ I and that for SO (C.14), together with
(4.34), we recover the optimality condition for (4.9), where λn,s is the dual for constraint.
The claim in Lemma 4.2 thus follows.
C.4 Bilateral Trading in Tree Network
In an example, [134] demonstrates that multilateral trades involving more than two par-
ticipants could be necessary when the network has cycles. The goal of this section is to
complement that result by showing that when the network has no cycle, bilateral trades are
sufficient for the trading process to converge to the solution of centralized dispatch.
For simplicity, we consider the deterministic case so that S = 1 and I = IRT. Without
loss of generality, we further compress the notation by assuming there is only one participant
connected to each node, so that In is a singleton for each n and we use network index n
and participant index i whichever is more convenient. These assumptions reduce our model
to that of [134]. The network is radial so there is no cycle. With the DC approximation,
the power flow model is equivalent to the standard network flow model [12] as shown in e.g.
[56].
We establish two decomposition results. We will state these results assuming that the
accumulated trade of the network is zero (x = 0) and we will work with the general line
capacity constraints instead of constraints specified by the loading vector requirements. In
a tree network, incorporating a nonzero accumulated trade x amounts to modifying the line
capacities and the utility functions; the loading vector requirements are special cases of the
general line capacity constraints as they simply require the induced line flows on congested
lines have nonpositive contribution to the congested direction. Thus our treatment leads to
no loss of generality.
We first consider decomposing feasible multilateral trades into feasible bilateral trades.
Proposition C.1. Suppose that the line capacities are rational numbers, i.e., f ∈ QL. For
any given feasible multilateral trade p ∈ QN involving more than two participants, i.e., p ∈ Pand ‖p‖0 := |n ∈ [N ] : pn 6= 0| ≥ 3, there exists a finite number K ∈ Z+ of bilateral trades
pk ∈ QN with ‖pk‖0 = 2, k = 1, . . . ,K, that are sequentially feasible such that∑K′
k=1 pk ∈ P
for any K ′ ≤ K and satisfies∑K
k=1 pk = p.

APPENDIX C. APPENDICES OF CHAPTER 4 99
Furthermore, under the same assumptions, there exists a finite number K ∈ Z+ of
bilateral trades pk ∈ QN with ‖pk‖0 = 2, k = 1, . . . , K, that are sequentially feasible for
any ordering satisfying∑K
k=1 pk = p. That is, let σ : [K] 7→ [K] be any permutation of the
indices 1, . . . , K, then∑K′
k=1 pσ(k) ∈ P, K ′ < K, and in particular pk ∈ P for any k ∈ [K].
Proof. Let (V , E) be the graph underlying the radial power network, with the node set
V = [N ] and the edge set containing the N − 1 lines of the network. Define the edge
capacity to the capacity of the corresponding line. A flow on the graph is a (N − 1)-
vector f that assigns a flow on each edge of the network satisfying flow conservation (for
each node, in-flow equals the out-flow) and edge capacity constraints. Given a multilateral
trade p, we denote the set of supply nodes by V+ = n ∈ V : pn > 0 and the set of
demand nodes by V− = n ∈ V : pn < 0. We then extend the graph by adding a
source node vs connecting to all the supply nodes and adding a sink node vt connecting
to all the demand node, so that the extended graph is (V , E) with V = V ∪ vs, vt and
E = E ∪ (vs, v) : v ∈ V+ ∪ (v, vt) : v ∈ V−. For edges (vs, v), v ∈ V+, we assign edge
capacity to be pv > 0. Similarly for edges (v, vt), v ∈ V−, the edge capacity is −pv > 0.
Now we make the observation that the multilateral trade p and its induced power flow
on the radial network is equivalent to the max flow from vs to vt on the flow network (V , E).In particular, the max flow solution would assign flows on the additional edges in E\E equal
to the capacities. Together with the power flow induced by p, we obtain a feasible flow
that maximizes the flow value from vs to vt. Therefore, the problem of identifying feasible
bilateral trades representing the multilateral trades is equivalent to finding feasible simple
flows representing the max flow on the flow network, where a simple flow from vs to vt is a
flow on a simple path from vs to vt, which must contain exactly one supply node and one
demand node.
The Ford-Fulkerson algorithm solves the max flow problem by iteratively identifying a
feasible simple flow on the residual graph. By the definition of the residual graph, this se-
quence of simple flows is sequentially feasible. Furthermore, it is known that Ford-Fulkerson
terminates in a finite number of steps for rational inputs. We thus conclude that the finite
collection of simple flows found by Ford-Fulkerson represents the finite collection of bilateral
trades satisfying the requirements of the first part of the proposition.
For the second part of the proposition, by Conformal Realization Theorem[11, Proposi-
tion 1.1] we know that there is a decomposition of the flow induced by p on network (V , E)into simple flows that are conformal in the sense that the flow direction of the simple flows
on each edge in E is the same as that of the flow induced by p. It follows that this finite col-
lection of simple flows is sequentially feasible for any ordering as for each edge if we choose
the positive direction to be that of the flow direction induced by p, then for any e ∈ E ,fke ≥ 0 and
∑Kk=1 fe = fe, where f is the flow induced by p and fk is the flow induced by
pk. The fact that each of the simple flows (and the corresponding bilateral trade) is feasible
with respect to the original network constraint follows from choosing the kth simple flow as

APPENDIX C. APPENDICES OF CHAPTER 4 100
the first simple flow in the sequence.
We proceed to show that any non-redundant profitable multilateral trades can be de-
composed into a collection of profitable bilateral trades on a tree network.
Definition C.1. We say a profitable (and feasible) multilateral trade p ∈ RN contains
redundancy if there exists a curtailment γ ∈ [0, 1]N such that p ∈ RN defined by pn = γnpn,
n ∈ [N ], is a feasible trade that achieves at least the same amount of profit as p. A profitable
multilateral trade is deemed non-redundant if it does not contain redundancy.
Without loss of practicality, we focus on and first state the result for the linear utility
case so that Ui(pi) = αipi for some αi ∈ R, i ∈ [N ]. The extension to nonlinear case is
discussed after that.
Proposition C.2. Under the same assumptions of Proposition C.1 and supposing that the
utility function U is linear, any non-redundant profitable multilateral trades can be decom-
posed into a finite collection of profitable bilateral trades. Formally, given a non-redundant
profitable trade p ∈ Qn, there exists a finite number K of bilateral trades pk that are sequen-
tially feasible for any ordering and profitable, and satisfies∑K
k=1 pk = p.
Proof. Consider the decomposition for the second part of Proposition C.1. If all the bilateral
trades in the decomposition are profitable, there is nothing to prove. Suppose there exists a
bilateral trade in the decomposition that is not profitable, denoted by p′. We claim that the
remaining trade p′′ = p−p′ is a feasible profitable trade that yields at least the same amount
of profit as p and therefore p has redundancy. Indeed, by the proof of Proposition C.1, p′′
is feasible. Furthermore,
U(p′′)− U(0) =
N∑
i=1
αip′′i − 0 =
N∑
i=1
αi(pi − p′i) > U(p)− U(0), (C.15)
as U(p′) =∑N
i=1 αi < U(0) = 0 as p′ is not profitable.
In general, when Ui(pi) is nonlinear but differentiable, we can decompose any given
profitable trade p intoM ∈ Z+ copies of trades p/M , each of which is profitable by concavity
of U . For pi ∈ [m∆pi, (m + 1)∆pi], m = 0, . . . ,M − 1, Taylor series offers a good linear
approximation
Ui(pi) = Ui(m∆pi) + U ′(m∆pi)pi + o(pi/M), (C.16)
where the last term denotes the approximation error which is of order higher than pi/M and
is negligible for practical purposes when M is sufficiently large. Applying Proposition C.2
gives a finite collection of profitable bilateral trades for each multilateral trade p/M with
mp/M already scheduled into the system. Pooling these collections of bilateral trades gives
a collection of bilateral trades that approximately represents the original multilateral trade.

APPENDIX C. APPENDICES OF CHAPTER 4 101
C.5 Trade Verification and Curtailment with Local Sce-
narios
The bulk of the chapter assumes that there is a commonly known set of global scenarios
[S], which may not be practically available when participants are distributed over a large
geographical area. In this section, we briefly discuss the other extreme setting where no
global scenario is known a priori and participants are still allowed to submit contingent
trades pks , where s ∈ Sk with Skdenoting the set of local scenarios that is known to the
participants involved in the kth trade. Motivated by common sources of uncertainty in power
systems (e.g. renewable generation level), we consider the setting that pks ∈ R|I| : s ∈ Skis an interval1 in R|I|. That is, the participants submit a lower bound pk and an upper bound
pk to the SO, so that given any realization of the local uncertainty s ∈ Sk, the resulting
contingent trade satisfies pks ∈ [pk, pk]. Since the SO may not be capable to identify the
exact correlation among these local scenarios, the verification of power network constraints
and curtailment has to be robust with respect to any combinations of the local scenarios.
That is, the accumulated network power injection defined by
xkn,s =
k−1∑
κ=0
∑
i∈In
γκpκi,s, n ∈ [N ], (C.17)
must be feasible, i.e.,
xks ∈ P , (C.18)
for every global scenario s = (s0, . . . , sk−1) generated by local scenarios sκ ∈ Sκ, κ =
0, . . . , k − 1.
We show that checking and curtailing a new trade pks ∈ [pk, pk] with its corresponding
network injection qks ∈ [qk, qk] can be done in an efficient way so that this process can
be carried out inductively. Under our assumption that the set of contingent trades is an
interval, the verification of xks + qks ∈ P , for all s = (s0, . . . , sk), sκ ∈ Sκ, is equivalent to
checking
H(xks + qks ) ≤ f , (C.19)
where xks is defined as in (C.17) with pκs ∈ [pκ, pκ], κ = 0, . . . , k− 1, and qks ∈ [qk, qk]. Given
the intervals for previous trades pκs ∈ [pκ, pκ], κ = 0, . . . , k−1, and their curtailment factors,
we can form the corresponding interval xks ∈ [xk, xk]. Then verifying the condition above
can be done by solving the following robust linear program:
maxγ∈[0,1]
γ (C.20a)
1When this does not hold, we can form the interval by finding the point-wise extremum of vector pks .

APPENDIX C. APPENDICES OF CHAPTER 4 102
s.t. xkn,s =k−1∑
κ=0
∑
i∈In
γκpκi,s, n ∈ [N ], (C.20b)
H(xks + γqks ) ≤ f , (C.20c)
where the last constraint must hold for all xks ∈ [xk, xk] and qks ∈ [qk, qk]. In particular, if
the optimal value of this program is γ⋆ = 1, then the new trade is feasible; if the optimal
value is less than 1, the new trade needs to be curtailed with curtailment factor γk = γ⋆ < 1.
Finally, we note that this optimization can be solved efficiently by a bisection process (as
the optimization variable is a scaler) equipped with a constraint checking sub-routine, which
verifies the strong solvability of a set of interval linear inequalities in polynomial time (cf.
[40, Section 2.13]).

Bibliography
[1] 2017 utility energy storage market snapshot. Technical report, Smart Electric Power
Alliance, 2017.
[2] S. Abbott. Why and how GM bought Mexican wind power, 2015. https://www.rmi.
org/news/blog_2015_10_22_why_and_how_gm_bought_mexican_wind_power/.
[3] P. Artzner, F. Delbaen, J. M. Eber, and D. Heath. Coherent measures of risk. Math-
ematical Finance, 9(3):203–228, 1999.
[4] D. Bakken, A. Bose, K.M. Chandy, P.P. Khargonekar, A. Kuh, S. Low, A. Von Meier,
K. Poolla, P. Varaiya, and F. Wu. GRIP - Grids with intelligent periphery: Control
architectures for Grid2050. In Smart Grid Communications (SmartGridComm), 2011
IEEE International Conference on, pages 7–12, Oct 2011.
[5] R. Baldick, R. Grant, and E. Kahn. Theory and application of linear supply function
equilibrium in electricity markets. Journal of Regulatory Economics, 25(2):143–167,
2004.
[6] M. Baran and F. F. Wu. Optimal sizing of capacitors placed on a radial distribution
system. IEEE Transactions on Power Delivery, 4(1):735–743, Jan 1989.
[7] M. E. Baran and F. F. Wu. Network reconfiguration in distribution systems for loss
reduction and load balancing. IEEE Transactions on Power Delivery, 4(2):1401–1407,
Apr 1989.
[8] G. L. Barbose, N. R. Darghouth, D. Millstein, K. LaCommare, N. DiSanti, and
R. Widiss. Tracking the sun 10: The installed price of residential and non-residential
photovoltaic systems in the united states. Technical report, Lawrence Berkeley Na-
tional Laboratory, 2017.
[9] A. Bemporad, M. Morari, V. Dua, and E. N. Pistikopoulos. The explicit linear
quadratic regulator for constrained systems. Automatica, 38(1):3–20, 2002.
[10] R. A. Berry and R. Johari. Economic modeling in networking: A primer. Foundations
and Trends in Networking, 6(3):165–286, 2013.
103

BIBLIOGRAPHY 104
[11] D. P. Bertsekas. Linear network optimization: algorithms and codes. MIT Press, 1991.
[12] D. P. Bertsekas. Network optimization: continuous and discrete models. Citeseer,
1998.
[13] D. Bienstock, M. Chertkov, and S. Harnett. Chance-constrained optimal power flow:
Risk-aware network control under uncertainty. SIAM Review, 56(3):461–495, 2014.
[14] E. Bitar and S. Low. Deadline differentiated pricing of deferrable electric power service.
In Proc. of IEEE 51st Annual Conference on Decision and Control (CDC), pages
4991–4997, Dec 2012.
[15] E. Bitar, R. Rajagopal, P. Khargonekar, and K. Poolla. The role of co-located storage
for wind power producers in conventional electricity markets. In Proc. of American
Control Conference (ACC), pages 3886–3891, 2011.
[16] M. Bolinger, J. Seel, and K. H. LaCommare. Utility-scale solar 2016: An empirical
analysis of project cost, performance, and pricing trends in the united states. Technical
report, Lawrence Berkeley National Laboratory, 2017.
[17] E. Boros and P. L. Hammer. Pseudo-Boolean optimization. Discrete Applied Mathe-
matics, 123(1):155–225, 2002.
[18] S. Bose. On the design of wholesale electricity markets under uncertainty. In 2015 53rd
Annual Allerton Conference on Communication, Control, and Computing (Allerton),
pages 203–210, Sept 2015.
[19] S. Bose and E. Bitar. Variability and the locational marginal value of energy storage.
In Proceedings of the 53rd IEEE Conference on Decision and Control, 2014.
[20] S. Bose, D. F. Gayme, U. Topcu, and K. M. Chandy. Optimal placement of energy
storage in the grid. In Proceedings of the 51st IEEE Conference on Decision and
Control, 2012.
[21] S. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein. Distributed optimization and
statistical learning via the alternating direction method of multipliers. Foundations
and Trends R© in Machine Learning, 3(1):1–122, 2011.
[22] S. Boyd and L. Vandenberghe. Convex Optimization. Cambridge University Press,
New York, NY, USA, 2004.
[23] D. S. Callaway, M. Fowlie, and G. McCormick. Location, location, location?: What
drives variation in the marginal benefits of renewable energy and demand-side effi-
ciency. Manuscript: UC Berkeley, 2015.

BIBLIOGRAPHY 105
[24] A. Castillo and D. Gayme. Evaluating the effects of real power losses in optimal power
flow based storage integration. IEEE Transactions on Control of Network Systems,
PP(99):1–1, 2017.
[25] A. Castillo and D. F. Gayme. Profit maximizing storage allocation in power grids. In
52nd IEEE Conference on Decision and Control, pages 429–435, Dec 2013.
[26] Anya Castillo and Dennice F. Gayme. Grid-scale energy storage applications in re-
newable energy integration: A survey. Energy Conversion and Management, 87(Sup-
plement C):885 – 894, 2014.
[27] H.-P. Chao and S. Peck. A market mechanism for electric power transmission. Journal
of Regulatory Economics, 10(1):25–59, 1996.
[28] C.H. Chen, B. S. He, Y.Y. Ye, and X.M. Yuan. The direct extension of ADMM for
multi-block convex minimzation problems is not necessarily convergent. Mathematical
Programming, to appear.
[29] I.-K. Cho and S. P. Meyn. Efficiency and marginal cost pricing in dynamic competitive
markets with friction. Theoretical Economics, 5(2):215–239, 2010.
[30] A. Clark, L. Bushnell, and R. Poovendran. A supermodular optimization framework
for leader selection under link noise in linear multi-agent systems. IEEE Transactions
on Automatic Control, 59(2):283–296, 2014.
[31] C. Curry. Lithium-ion battery costs and market. Technical report, Bloomberg New
Energy Finance, 2017.
[32] E. Dall’Anese, Hao Zhu, and G.B. Giannakis. Distributed optimal power flow for
smart microgrids. IEEE Transactions on Smart Grid, 4(3):1464–1475, Sept 2013.
[33] B. Daryanian and R. E. Bohn. Sizing of electric thermal storage under real time
pricing. IEEE Transactions on Power Systems, 8(1):35–43, 1993.
[34] C. J. Day, B. F. Hobbs, and Jong-Shi Pang. Oligopolistic competition in power
networks: a conjectured supply function approach. IEEE Transactions on Power
Systems, 17(3):597–607, Aug 2002.
[35] K. Dvijotham, M. Chertkov, and S. Backhaus. Storage sizing and placement through
operational and uncertainty-aware simulations. In Proceedings of the 47th Hawaii
International Conference on System Sciences, 2014.
[36] B. C. Eaves and R. M. Freund. Optimal scaling of balls and polyhedra. Mathematical
Programming, 23(1):138–147, 1982.

BIBLIOGRAPHY 106
[37] A. Eller and D. Gauntlett. Energy storage trends and opportunities in emerging
markets. Technical report, International Finance Corporation, 2017.
[38] A. Faghih, M. Roozbehani, and M. A. Dahleh. On the Economic Value and Price-
Responsiveness of Ramp-Constrained Storage. ArXiv e-prints, 2012.
[39] M. Farivar, L. Chen, and S. Low. Equilibrium and dynamics of local voltage control
in distribution systems. In 52nd IEEE Conference on Decision and Control, pages
4329–4334. IEEE, 2013.
[40] M. Fiedler, J. Nedoma, J. Ramik, J. Rohn, and K.green Zimmermann. Linear opti-
mization problems with inexact data. Springer Science & Business Media, 2006.
[41] Google. Googles green PPAs: What, how, and why, 2013. http:
//static.googleusercontent.com/external_content/untrusted_dlcp/cfz.
cc/en/us/green/pdfs/renewable-energy.pdf.
[42] GTM Research. U.S. energy storage monitor, 2015. https://www.greentechmedia.
com/research/subscription/u.s.-energy-storage-monitor.
[43] A. Gupta, R. Jain, K. Poolla, and P. Varaiya. Equilibria in two-stage electricity
markets. In 2015 54th IEEE Conference on Decision and Control (CDC), pages 5833–
5838, Dec 2015.
[44] F. Hahn. Stability. Handbook of mathematical economics, 2:745–793, 1982.
[45] D. Han and X. Yuan. A note on the alternating direction method of multipliers.
Journal of Optimization Theory and Applications, 155(1):227–238, 2012.
[46] H. Hao, B. M. Sanandaji, K. Poolla, and T. L. Vincent. Aggregate flexibility of
thermostatically controlled loads. IEEE Transactions on Power Systems, submitted.
[47] B. He and X. Yuan. On the O(1/n) convergence rate of the Douglas–Rachford al-
ternating direction method. SIAM Journal on Numerical Analysis, 50(2):700–709,
2012.
[48] W. W. Hogan. Contract networks for electric power transmission. Journal of Regula-
tory Economics, 4(3):211–242, 1992.
[49] M. Hong and Z.-Q. Luo. On the linear convergence of the alternating direction method
of multipliers. ArXiv e-prints, August 2012.
[50] L. Huang, J. Walrand, and K. Ramchandran. Optimal demand response with energy
storage managements. In Proc. of IEEE Third International Conference on Smart
Grid Communications (SmartGridComm), pages 61–66, 2012.

BIBLIOGRAPHY 107
[51] M. Z. Jacobson, M. A. Delucchi, Z. A.F. Bauer, S. C. Goodman, W. E. Chapman,
M. A. Cameron, C. Bozonnat, L. Chobadi, H. A. Clonts, P. Enevoldsen, J. R. Erwin,
S. N. Fobi, O. K. Goldstrom, E. M. Hennessy, J. Liu, J. Lo, C. B. Meyer, S. B. Morris,
K. R. Moy, P. L. O’Neill, I. Petkov, S. Redfern, R. Schucker, M. A. Sontag, J. Wang,
E. Weiner, and A. S. Yachanin. 100% clean and renewable wind, water, and sunlight
all-sector energy roadmaps for 139 countries of the world. Joule, 1(1):108 – 121, 2017.
[52] Rishee K Jain, Junjie Qin, and Ram Rajagopal. Data-driven planning of distributed
energy resources amidst socio-technical complexities. Nature Energy, 2(8):nen-
ergy2017112, 2017.
[53] Y. Ji, L. Tong, and R. J. Thomas. Probabilistic forecast of real-time LMP and network
congestion. IEEE Transactions on Power Systems, 32(2):831–841, 2017.
[54] W. Kempton, V. Udo, Komara K. Huber, K., S. Letendre, S. Baker, D. Brunner,
and N. Pearre. A test of Vehicle-to-Grid (V2G) for energy storage and frequency
regulation in the PJM system, 2008. https://www1.udel.edu/V2G/resources/
test-v2g-in-pjm-jan09.pdf.
[55] S. Khuller, A. Moss, and J. S. Naor. The budgeted maximum coverage problem.
Information Processing Letters, 70(1):39–45, 1999.
[56] A. Kim, V. Liaghat, J. Qin, and A. Saberi. Online energy storage management: an
algorithmic approach. In LIPIcs-Leibniz International Proceedings in Informatics,
volume 60. Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik, 2016.
[57] J. H. Kim and W. B. Powell. Optimal energy commitments with storage and inter-
mittent supply. Operations Research, 59(6):1347–1360, 2011.
[58] P. B. S. Kiran and N. M. Pindoriya. Study of consumer benefit functions for demand
response algorithm. In 2016 National Power Systems Conference (NPSC), pages 1–6,
Dec 2016.
[59] D. S. Kirschen and G. Strbac. Fundamentals of Power System Economics. Wiley,
2004.
[60] M. Kraning, E. Chu, J. Lavaei, and S. Boyd. Dynamic Network Energy Management
Via Proximal Message Passing. Foundations and Trends in Optimization, 1(2):1–54,
2013.
[61] Matt Kraning, Yang Wang, Ekine Akuiyibo, and Stephen Boyd. Operation and con-
figuration of a storage portfolio via convex optimization. IFAC Proceedings Volumes,
44(1):10487–10492, 2011.

BIBLIOGRAPHY 108
[62] A. Krause and C. Guestrin. A note on the budgeted maximization on submodular
functions. Technical report, CMU-CALD-05-103, Carnegie Mellon University, 2005.
[63] A. Krause, R. Rajagopal, A. Gupta, and C. Guestrin. Simultaneous optimization of
sensor placements and balanced schedules. IEEE Transactions on Automatic Control,
56(10):2390–2405, 2011.
[64] A. Krause, A. Singh, and C. Guestrin. Near-optimal sensor placements in Gaussian
processes: Theory, efficient algorithms and empirical studies. Journal of Machine
Learning Research, 9:235–284, 2008.
[65] Q. Li, R. Negi, and M. D. Ili. Phasor measurement units placement for power system
state estimation: A greedy approach. In 2011 IEEE Power and Energy Society General
Meeting, pages 1–8, July 2011.
[66] D. Lindley. Smart grids: The energy storage problem. Nature, 463(7277):18, 2010.
[67] Z. Liu, A. Clark, P. Lee, L. Bushnell, D. Kirschen, and R. Poovendran. Submodular
optimization for voltage control. IEEE Transactions on Power Systems, PP(99):1–1,
2017.
[68] S. H. Low. Convex relaxation of optimal power flow, Part I: Formulations and equiv-
alence. ArXiv e-prints, May 2014.
[69] S. H. Low. Convex relaxation of optimal power flow, Part II: Exactness. ArXiv
e-prints, May 2014.
[70] D. G Luenberger and Y. Ye. Linear and Nonlinear Programming, volume 2. Springer,
1984.
[71] A. Mandel and H. Gintis. Decentralized Pricing and the equivalence between Nash
and Walrasian equilibrium. Journal of Mathematical Economics, 63(C):84–92, 2016.
[72] A. Mas-Colell, M. D. Whinston, and J. R. Green. Microeconomic theory. Oxford
University Press, New York, 1995.
[73] J. Mather, E. Baeyens, D. Kalathil, and K. Poolla. The geometry of locational
marginal prices. submitted to IEEE TRANSACTIONS ON POWER SYSTEMS.
[74] S. Meyn, M. Negrete-Pincetic, G. Wang, A. Kowli, and E. Shafieepoorfard. The value
of volatile resources in electricity markets. In 49th IEEE Conference on Decision and
Control (CDC), pages 1029–1036, Dec 2010.
[75] C. W. Miller and I. Yang. Optimal control of conditional value-at-risk in continuous
time. SIAM Journal on Control and Optimization, 55(2):856–884, 2017.

BIBLIOGRAPHY 109
[76] B. Mirzasoleiman, A. Karbasi, R. Sarkar, and A. Krause. Distributed submodular
maximization. Journal of Machine Learning Research, 17(1–44), 2016.
[77] J. M. Morales, A. J. Conejo, K. Liu, and J. Zhong. Pricing electricity in pools with
wind producers. IEEE Transactions on Power Systems, 27(3):1366–1376, Aug 2012.
[78] D. Munoz-Alvarez and E. Bitar. Financial storage rights in electric power networks.
arXiv:1410.7822 [math.OC], 2014.
[79] M. Munsell. US energy storage market grew 243% in 2015, largest
year on record, 2016. https://www.greentechmedia.com/articles/read/
us-energy-storage-market-grew-243-in-2015-largest-year-on-record.
[80] National Renewable Energy Laboratory. The role of energy storage with renewable
electricity generation, 2010.
[81] National Renewable Energy Laboratory. Western wind and solar integration study,
2010.
[82] National Renewable Energy Laboratory. The value of energy storage for grid applica-
tions, 2013.
[83] A. Nayyar, M. Negrete-Pincetic, K. Poolla, and P. Varaiya. Duration-differentiated
energy services with a continuum of loads. IEEE Transactions on Control of Network
Systems, 3(2):182–191, June 2016.
[84] M. J. Neely. Stochastic network optimization with application to communication and
queueing systems. Synthesis Lectures on Communication Networks, 3(1):1–211, 2010.
[85] G. L. Nemhauser, L. A. Wolsey, and M. L. Fisher. An analysis of approximations
for maximizing submodular set functions–i. Mathematical Programming, 14:265–294,
1978.
[86] Yu Nesterov. Efficiency of coordinate descent methods on huge-scale optimization
problems. SIAM Journal on Optimization, 22(2):341–362, 2012.
[87] North American Electric Reliability Corporation. Distributed energy resources: Con-
nection modeling and reliability considerations. Technical report, 2017.
[88] B. Nykvist and M. Nilsson. Rapidly falling costs of battery packs for electric vehicles.
Nature Climate Change, 5:329–332, 2015.
[89] G. O’Brien and R. Rajagopal. A Method for Automatically Scheduling Notified De-
ferrable Loads. In Proc. of American Control Conference (ACC), pages 5080–5085,
2013.

BIBLIOGRAPHY 110
[90] A. Olshevsky. Minimal controllability problems. IEEE Transactions on Control of
Network Systems, 1(3):249–258, 2014.
[91] H. Pandzic, Y. Wang, T. Qiu, Y. Dvorkin, and D. S. Kirschen. Near-optimal method
for siting and sizing of distributed storage in a transmission network. IEEE Transac-
tions on Power Systems, 30(5):2288–2300, 2015.
[92] A. ParandehGheibi, M. Roozbehani, M. A. Dahleh, and A. Ozdaglar. The value of
storage in securing reliability and mitigating risk in energy systems. Energy Systems,
6(1):129–152, 2015.
[93] G. Pritchard, G. Zakeri, and A. Philpott. A single-settlement, energy-only electric
power market for unpredictable and intermittent participants. Operations Research,
58(4-part-2):1210–1219, 2010.
[94] W. Qi, Y. Liang, and Z.-J. M. Shen. Joint planning of energy storage and transmission
for wind energy generation. Operations Research, 63(6):1280–1293, 2015.
[95] J. Qin, Y. Chow, J. Yang, and R. Rajagopal. Control of generalized energy storage
networks. ArXiv e-prints, April 2015.
[96] J. Qin, Y. Chow, J. Yang, and R. Rajagopal. Distributed online modified greedy
algorithm for networked storage operation under uncertainty. IEEE Transactions on
Smart Grid, 7(2):1106–1118, March 2016.
[97] J. Qin, Y. Chow, J. Yang, and R. Rajagopal. Online modified greedy algorithm for
storage control under uncertainty. IEEE Transactions on Power Systems, 31(3):1729–
1743, May 2016.
[98] J. Qin and R. Rajagopal. Dynamic programming solution to distributed storage oper-
ation and design. In Proceedings of the 2013 IEEE Power & Energy Society General
Meeting, 2013.
[99] J. Qin, R. Rajagopal, and P. P. Varaiya. Flexible market for smart grid: Coordinated
trading of contingent contracts. IEEE Transactions on Control of Network Systems,
PP(99):1–1, 2017.
[100] J. Qin, R. Sevlian, D. Varodayan, and R. Rajagopal. Optimal electric energy storage
operation. In Proc. of IEEE Power and Energy Society General Meeting, pages 1–6,
2012.
[101] J. Qin, H.-I Su, and R. Rajagopal. Risk limiting dispatch with fast ramping storage.
ArXiv e-prints, December 2012.
[102] J. Qin, H.-I. Su, and R. Rajagopal. Storage in risk limiting dispatch: Control and
approximation. In Proceedings of the 2013 American Control Conference, 2013.

BIBLIOGRAPHY 111
[103] J. Qin, I. Yang, and R. Rajagopal. Submodularity of storage placement optimization
in power networks. submitted to IEEE Transactions on Automatic Control, 2017.
[104] Renewable Energy Policy Network. Renewables global status report, 2014.
[105] R. T. Rockafellar and S. Uryasev. Optimization of conditional value-at-risk. Journal
of Risk, 2:21–42, 2000.
[106] P. Samadi, H. Mohsenian-Rad, R. Schober, and V. W. S. Wong. Advanced demand side
management for the future smart grid using mechanism design. IEEE Transactions
on Smart Grid, 3(3):1170–1180, Sept 2012.
[107] O. Schmidt, A. Hawkes, A. Gambhir, and I. Staffell. The future cost of electrical
energy storage based on experience rates. Nature Energy, 2(8):nenergy2017110, 2017.
[108] F. C. Schweppe, M. C. Caramanis, R. D. Tabors, and R. E. Bohn. Spot pricing of
electricity. Springer Science & Business Media, 1988.
[109] Z.-J. M. Shen, C. Coullard, and M. S. Daskin. A joint location-inventory model.
Transportation Science, 37(1):40–55, 2003.
[110] E. Sjodin, D. F. Gayme, and U. Topcu. Risk-mitigated optimal power flow for wind
powered grids. In Proceedings of the 2012 American Control Conference, 2012.
[111] S. Stoft. Power System Economics: Designing Markets for Electricity. Wiley-IEEE
Press, 2002.
[112] B. Stott, J. Jardim, and O. Alsac. DC power flow revisited. IEEE Transactions on
Power Systems, 24(3):1290–1300, 2009.
[113] H. I. Su and A. El Gamal. Modeling and Analysis of the Role of Energy Storage
for Renewable Integration: Power Balancing. IEEE Transactions on Power Systems,
28(4):4109–4117, 2013.
[114] T. H. Summers, F. L. Cortesi, and J. Lygeros. On submodularity and controllability
in complex dynamical networks. IEEE Transactions on Control of Network Systems,
3(1):91–101, 2016.
[115] M. Sviridenko. A note on maximizing a submodular set function subject to a knapsack
constraint. Operations Research Letters, 32:41–43, 2004.
[116] W. Tang, J. Qin, R. Jain, and R. Rajagopal. Pricing sequential forward power
contracts. In 2015 IEEE International Conference on Smart Grid Communications
(SmartGridComm), pages 563–568, Nov 2015.
[117] Y Tang and S. H. Low. Optimal placement of energy storage in distribution networks.
In Proceedings of the 55th IEEE Conference on Decision and Control, 2016.

BIBLIOGRAPHY 112
[118] J. A. Taylor. Financial storage rights. IEEE Transactions on Power Systems,
30(2):997–1005, 2015.
[119] C. Thrampoulidis, S. Bose, and B. Hassibi. Optimal placement of distributed energy
storage in power networks. IEEE Transactions on Automatic Control, 61(2):416–429,
2016.
[120] D. M. Topkis. Minimizing a submodular function on a lattice. Operations Research,
26(2):305–321, 1978.
[121] K. Tweed. Amazon and Dominion Power forge a new renewable energy
path in Virginia, 2016. https://www.greentechmedia.com/articles/read/
Amazon-and-Dominion-Power-Forge-a-New-Renewable-Energy-Path-in-Virginia.
[122] V. Tzoumas, M. A. Rahimian, G. J. Pappas, and A. Jadbabaie. Minimal actuator
placement with bounds on control effort. IEEE Transactions on Control of Network
Systems, 3(1):67–78, 2016.
[123] University of Washington. Power systems test case archive. http://www.ee.
washington.edu/research/pstca.
[124] R. Urgaonkar, B. Urgaonkar, M. J. Neely, and A. Sivasubramaniam. Optimal power
cost management using stored energy in data centers. In Proc. of the ACM SIGMET-
RICS Joint International Conference on Measurement and Modeling of Computer
Systems, SIGMETRICS ’11, pages 221–232, 2011.
[125] U.S. Department of Energy. 20% Wind Energy by 2030, 2008.
[126] P. M. van de Ven, N. Hegde, L. Massoulie, and T. Salonidis. Optimal control of
end-user energy storage. ArXiv e-prints, 2012.
[127] P. Varaiya, F. Wu, and J.W. Bialek. Smart Operation of Smart Grid: Risk-Limiting
Dispatch. Proceedings of the IEEE, 99(1):40–57, Jan 2011.
[128] G. Wang, A. Kowli, M. Negrete-Pincetic, E. Shafieepoorfard, and S. Meyn. A control
theorist’s perspective on dynamic competitive equilibria in electricity markets. IFAC
Proceedings Volumes, 44(1):4933 – 4938, 2011. 18th IFAC World Congress.
[129] E. Wei and A. Ozdaglar. On the O(1/k) Convergence of Asynchronous Distributed
Alternating Direction Method of Multipliers. ArXiv e-prints, 2013.
[130] R. Wiser and M. Bolinger. Wind technologies market report. Technical report, US
DOE, 2016.
[131] S. Wogrin and D. F. Gayme. Optimizing storage siting, sizing, and technology port-
folios in transmission-constrained networks. IEEE Transactions on Power Systems,
30(6):3304–3313, 2015.

BIBLIOGRAPHY 113
[132] A. J. Wood and B. F. Wollenberg. Power Generation, Operation, and Control. John
Wiley & Sons, 2012.
[133] A.J. Wood and B.F. Wollenberg. Power system generation, operation and control.
John Wiley, New York, 1996.
[134] F. Wu and P. Varaiya. Coordinated multilateral trades for electric power networks:
theory and implementation. International Journal of Electrical Power & Energy Sys-
tems, 21(2):75 – 102, 1999.
[135] F. Wu, P. Varaiya, P. Spiller, and S. Oren. Folk theorems on transmission access:
Proofs and counterexamples. Journal of Regulatory Economics, 10(1):5–23, 1996.
[136] L. Xie, Y. Gu, A. Eskandari, and M. Ehsani. Fast MPC-based coordination of wind
power and battery energy storage systems. Journal of Energy Engineering, 138(2):43–
53, 2012.
[137] Y. Xu and L. Tong. Optimal operation and economic value of energy storage at
consumer locations. IEEE Transactions on Automatic Control, 62(2):792–807, Feb
2017.
[138] I. Yang, S. Burden, R. Rajagopal, S. S. Sastry, and C. J. Tomlin. Approximation
algorithms for optimization of combinatorial dynamical systems. IEEE Transactions
on Automatic Control, 61(9):2644–2649, 2016.
[139] W. I. Zangwill. Nonlinear programming: A unified approach. Prentice-Hall, 1969.
[140] B. Zhang, R. Rajagopal, and D. Tse. Network risk limiting dispatch: Optimal control
and price of uncertainty. IEEE Transactions on Automatic Control, 59(9):2442–2456,
2014.
[141] R. D. Zimmerman, C. E. Murillo-Sanchez, and R. J. Thomas. MATPOWER: Steady-
state operations, planning, and analysis tools for power systems research and educa-
tion. IEEE Transactions on Power Systems, 26(1):12–19, 2011.