
Distributed Spectrum Sensing for Cognitive Radio Networks With Heterogeneous Traffic
5
Distributed Spectrum Sensing for Cognitive Radio Networks with Heterogeneous Traffic (Invited Paper) Sabita Maharjan 1,2 , Chau Yuen 3 , Yong Huat Chew 4 , Yan Zhang 1,2 and Stein Gjessing 1,2 1 Simula Research Laboratory, Norway. 2 University of Oslo, Norway. 3 Singapore University of Technology and Design, Singapore. 4 Institute for Infocomm Research, Singapore. Email: [email protected], [email protected], [email protected], {yanzhang, steing}@simula.no Abstract—Cooperative spectrum sensing improves reliability and the detection performance of sensing. However, the fully cooperative scenario may not be realistic to assume in many cases. We consider a cognitive radio network with heavy traffic users and light traffic users and analyze their behavior towards sensing using the concept of mixed strategy Nash equilibrium. Further, we design a distributed game using evolutionary game theory such that as long as light traffic users are present, they share the sensing responsibility while heavy traffic users get a free ride. Finally, the evolution dynamics is shown to converge to the evolutionarily stable strategy for the case of multiple users. I. I NTRODUCTION Spectrum sensing is a crucial function for cognitive radio networks [1][2] to detect available channels from primary user spectra and also to prevent primary users from receiving excessive interference from the secondary users. Cooperative spectrum sensing [3] has been recognized as a powerful approach to improve reliability and the detection performance. Sensing takes some time (and also energy) which, they can otherwise utilize for their data transmission. In most of the existing literature on cooperative spectrum sensing, there is an inherent assumption that all secondary users cooperate with each other to achieve greater good of the system [4][5][6]. However, if the secondary users are selfish and rational, they do not collaborate with each other for cooperative sensing without any incentive [7]. This kind of selfish behavior comes into the picture for different situations e.g. if the secondary users belong to different systems, if their spectrum require- ments are heterogeneous, if there is no central authority to assign the sensing responsibility etc. Under such situations, the decision of a secondary user to participate in cooperative sensing depends not only on the user’s strategy but also on the strategies taken by other users. This framework can be modeled using non-cooperative game theory. The selfish behavior of secondary users in the sensing game was first modeled in [8]. The authors have proposed an evolutionary game [9] to achieve cooperation between the secondary users to perform cooperative spectrum sensing. The authors have formulated the payoff for each user as its throughput. However, they have not considered the cost associated with energy for sensing and for transmitting data in the utility functions. The motivation for this work stems from the need to analyze the behavior of selfish users with heterogeneous requirements towards cooperative sensing and to tailor an approach to allocate the spectrum that suits the heterogeneity. We consider a secondary network with light traffic users and heavy traffic users such that the light traffic users have idle time slots in a frame duration. In addition to the sensing duration, we consider the costs in terms of energy spent on sensing and on data transmission as well. Apart from that, we design the evolution dynamics of the secondary users such that the heavy traffic users always get a free ride thus prioritizing their data transmission. The rest of this paper is organized as following. Sec- tion II shows the system model. We describe about the game theoretical framework for the sensing game and the corre- sponding equilibrium in section III. Equilibrium analysis for a distributed learning algorithm based on evolutionary game theory and the simulation results are presented in section IV. Section V concludes the paper. II. SYSTEM MODEL We consider the sensing of a single channel with M sub- channels from the primary system. There are K secondary users, located far away from primary base station as shown in Figure 1. In this scenario, the received signal to noise ratio for secondary users from primary base station is very small. We model the spectrum sensing as a non-cooperative game. The players of the game are the secondary users S = {s 1 ,s 2 , ....,s M }. The strategy of each player is to choose from the binary strategy set of sensing or not-sensing at the beginning of each sensing interval . Using game theoretic notation, the binary strategy set for user i can be represented as (1). The payoff of each user is the difference between the benefit of using the spectrum and the associated cost.
-
Upload
sauth-martua -
Category
Documents
-
view
214 -
download
1
Transcript of Distributed Spectrum Sensing for Cognitive Radio Networks With Heterogeneous Traffic

Distributed Spectrum Sensing for Cognitive RadioNetworks with Heterogeneous Traffic
(Invited Paper)Sabita Maharjan1,2, Chau Yuen3, Yong Huat Chew4, Yan Zhang1,2 and Stein Gjessing1,2
1 Simula Research Laboratory, Norway.2 University of Oslo, Norway.
3 Singapore University of Technology and Design, Singapore.4 Institute for Infocomm Research, Singapore.
Email: [email protected], [email protected], [email protected], {yanzhang, steing}@simula.no
Abstract—Cooperative spectrum sensing improves reliabilityand the detection performance of sensing. However, the fullycooperative scenario may not be realistic to assume in manycases. We consider a cognitive radio network with heavy trafficusers and light traffic users and analyze their behavior towardssensing using the concept of mixed strategy Nash equilibrium.Further, we design a distributed game using evolutionary gametheory such that as long as light traffic users are present, theyshare the sensing responsibility while heavy traffic users get afree ride. Finally, the evolution dynamics is shown to converge tothe evolutionarily stable strategy for the case of multiple users.
I. INTRODUCTION
Spectrum sensing is a crucial function for cognitive radionetworks [1][2] to detect available channels from primaryuser spectra and also to prevent primary users from receivingexcessive interference from the secondary users. Cooperativespectrum sensing [3] has been recognized as a powerfulapproach to improve reliability and the detection performance.Sensing takes some time (and also energy) which, they canotherwise utilize for their data transmission. In most of theexisting literature on cooperative spectrum sensing, there isan inherent assumption that all secondary users cooperate witheach other to achieve greater good of the system [4][5][6].However, if the secondary users are selfish and rational, theydo not collaborate with each other for cooperative sensingwithout any incentive [7]. This kind of selfish behavior comesinto the picture for different situations e.g. if the secondaryusers belong to different systems, if their spectrum require-ments are heterogeneous, if there is no central authority toassign the sensing responsibility etc. Under such situations,the decision of a secondary user to participate in cooperativesensing depends not only on the user’s strategy but also onthe strategies taken by other users. This framework can bemodeled using non-cooperative game theory.
The selfish behavior of secondary users in the sensinggame was first modeled in [8]. The authors have proposedan evolutionary game [9] to achieve cooperation betweenthe secondary users to perform cooperative spectrum sensing.The authors have formulated the payoff for each user as
its throughput. However, they have not considered the costassociated with energy for sensing and for transmitting datain the utility functions.
The motivation for this work stems from the need to analyzethe behavior of selfish users with heterogeneous requirementstowards cooperative sensing and to tailor an approach toallocate the spectrum that suits the heterogeneity. We considera secondary network with light traffic users and heavy trafficusers such that the light traffic users have idle time slotsin a frame duration. In addition to the sensing duration, weconsider the costs in terms of energy spent on sensing andon data transmission as well. Apart from that, we design theevolution dynamics of the secondary users such that the heavytraffic users always get a free ride thus prioritizing their datatransmission.
The rest of this paper is organized as following. Sec-tion II shows the system model. We describe about the gametheoretical framework for the sensing game and the corre-sponding equilibrium in section III. Equilibrium analysis fora distributed learning algorithm based on evolutionary gametheory and the simulation results are presented in section IV.Section V concludes the paper.
II. SYSTEM MODEL
We consider the sensing of a single channel with M sub-channels from the primary system. There are K secondaryusers, located far away from primary base station as shownin Figure 1. In this scenario, the received signal to noise ratiofor secondary users from primary base station is very small.
We model the spectrum sensing as a non-cooperative game.The players of the game are the secondary users S ={s1, s2, ...., sM}. The strategy of each player is to choosefrom the binary strategy set of sensing or not-sensing at thebeginning of each sensing interval . Using game theoreticnotation, the binary strategy set for user i can be representedas (1). The payoff of each user is the difference between thebenefit of using the spectrum and the associated cost.
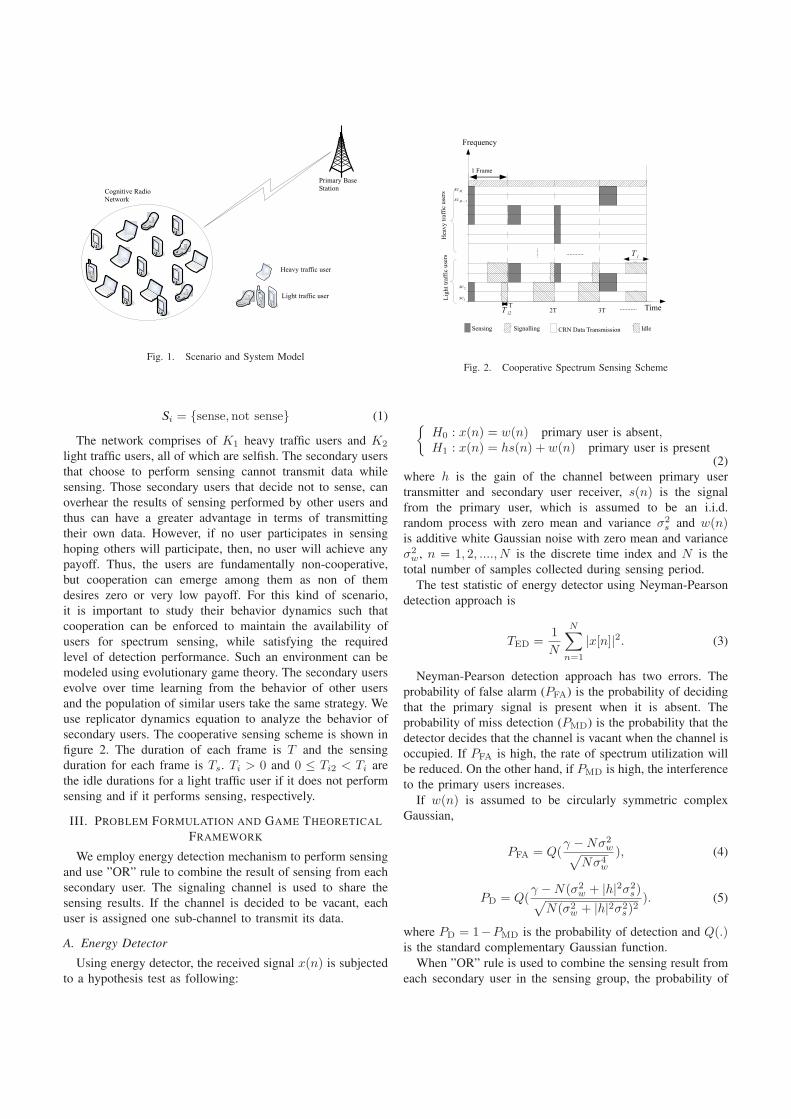
Fig. 1. Scenario and System Model
Si = {sense, not sense} (1)
The network comprises of K1 heavy traffic users and K2
light traffic users, all of which are selfish. The secondary usersthat choose to perform sensing cannot transmit data whilesensing. Those secondary users that decide not to sense, canoverhear the results of sensing performed by other users andthus can have a greater advantage in terms of transmittingtheir own data. However, if no user participates in sensinghoping others will participate, then, no user will achieve anypayoff. Thus, the users are fundamentally non-cooperative,but cooperation can emerge among them as non of themdesires zero or very low payoff. For this kind of scenario,it is important to study their behavior dynamics such thatcooperation can be enforced to maintain the availability ofusers for spectrum sensing, while satisfying the requiredlevel of detection performance. Such an environment can bemodeled using evolutionary game theory. The secondary usersevolve over time learning from the behavior of other usersand the population of similar users take the same strategy. Weuse replicator dynamics equation to analyze the behavior ofsecondary users. The cooperative sensing scheme is shown infigure 2. The duration of each frame is T and the sensingduration for each frame is Ts. Ti > 0 and 0 ≤ Ti2 < Ti arethe idle durations for a light traffic user if it does not performsensing and if it performs sensing, respectively.
III. PROBLEM FORMULATION AND GAME THEORETICALFRAMEWORK
We employ energy detection mechanism to perform sensingand use ”OR” rule to combine the result of sensing from eachsecondary user. The signaling channel is used to share thesensing results. If the channel is decided to be vacant, eachuser is assigned one sub-channel to transmit its data.
A. Energy Detector
Using energy detector, the received signal x(n) is subjectedto a hypothesis test as following:
Fig. 2. Cooperative Spectrum Sensing Scheme
{H0 : x(n) = w(n) primary user is absent,H1 : x(n) = hs(n) + w(n) primary user is present
(2)where h is the gain of the channel between primary usertransmitter and secondary user receiver, s(n) is the signalfrom the primary user, which is assumed to be an i.i.d.random process with zero mean and variance σ2
s and w(n)is additive white Gaussian noise with zero mean and varianceσ2w, n = 1, 2, ...., N is the discrete time index and N is the
total number of samples collected during sensing period.The test statistic of energy detector using Neyman-Pearson
detection approach is
TED =1
N
N∑n=1
|x[n]|2. (3)
Neyman-Pearson detection approach has two errors. Theprobability of false alarm (PFA) is the probability of decidingthat the primary signal is present when it is absent. Theprobability of miss detection (PMD) is the probability that thedetector decides that the channel is vacant when the channel isoccupied. If PFA is high, the rate of spectrum utilization willbe reduced. On the other hand, if PMD is high, the interferenceto the primary users increases.
If w(n) is assumed to be circularly symmetric complexGaussian,
PFA = Q(γ −Nσ2
w√Nσ4
w
), (4)
PD = Q(γ −N(σ2
w + |h|2σ2s)√
N(σ2w + |h|2σ2
s)2). (5)
where PD = 1−PMD is the probability of detection and Q(.)is the standard complementary Gaussian function.
When ”OR” rule is used to combine the sensing result fromeach secondary user in the sensing group, the probability of

miss detection of cooperative sensing improves proportional tothe number of secondary users. However, the tradeoff is theprobability of false alarm. So, a common practice is to reducethe probability of false alarm with cooperative sensing for thegiven target probability of detection.
Now taking the required probability of detection to be PD
and substituting γ from (5) to (4), we have,
PFA = Q(Q−1(PD)(1 + λ) +√Nλ), (6)
where λ =|h|2σ2
s
σ2w
is the received signal to noise ratio of theprimary user under H1.
B. Non-cooperative Game for Cooperative Sensing
The throughput of each sensing user when the primary useris not present and when no false alarm is generated (RH0(Ts))is
RH0(Ts) =T − Ts
T(1− PFA)CH0 (7)
where CH0 is the data rate that the secondary user is offeredunder H0. When the primary user is present but the detectionis missed, the throughput of each sensing user (RH1(Ts)) is
RH1(Ts) =T − Ts
TPMDCH1 (8)
where CH1 is the data rate that the secondary user is offeredunder H1.
Let us assume that pH0 is the probability that the primaryuser is absent. Then, the total throughput of the secondary user(R(Ts)) is
R(Ts) = pH0RH0(Ts) + (1− pH0)RH1(Ts) (9)
We assume that pH0 ≈ 1 and CH1 << CH0 . So, theachievable throughput can be approximated as
R(Ts) ≈ pH0RH0(Ts) (10)
Let Scs = {s1, s2, ...., sJ} be the set of secondary usersthat participate in cooperative sensing, where J is the numberof users that perform sensing, that includes both heavy trafficsensing users and light traffic sensing users.
1) Heavy Traffic Users: For a heavy traffic user, if itdecides to be a sensing user against K1−1 other heavy trafficusers, the average payoff for it is
Uht,s(J) = U0(1− τ
J)−στ
J−etxt(1− τ
J) J ∈ [1,K1+K2],
(11)where τ = Ts
T , U0 = pH0(1 − PFA)CH0 , PFA = (1 −∏Ji=1 PFA,i), i is the user index among sensing users, σ is the
energy consumed per unit of time for sensing, etxt representsthe energy consumption per unit time to transmit data, and wehave assumed that the sensing duration for both heavy trafficsensing users and light traffic sensing users that contribute tocooperative sensing, is the same. If it decides to be the non-sensing user, its average payoff will be
Uht,ns(J) =
{U0 − etxt if J ∈ [1,K1 +K2 − 1],0 if J = 0.
(12)
If the achievable payoff for being a free rider is greater thanthe achievable payoff for contributing in cooperative sensing,each secondary user will tend to be a free rider [8]. Conversely,if the payoff of being a sensing user is greater, all users willtake the sensing strategy and thus, there will be no users thatcan take free ride. So, instead of these pure strategies, let usconsider, p1 is the probability with which a heavy traffic userchooses to participate in sensing. Let p2 be the probabilitywith which a light traffic user chooses to be a sensing user.Then, the average utility for pure strategy ”sense” for a heavytraffic user is,
Uht,s =
∑K2
j2=0
∑K1−1j1=0
(K2
j2
)p2
j2(1− p2)(K2−j2)(
K1 − 1j1
)p1
j1(1− p1)(K1−1−j1)
Uht,s(j1 + j2 + 1).(13)
where, 0 < p1, p2 < 1 for 0 < τ < 1. The utility for purestrategy ”not sense” is
Uht,ns =
∑K2
j2=0
∑K1−1j1=0
(K2
j2
)p2
j2(1− p2)(K2−j2)(
K1 − 1j1
)p1
j1(1− p1)(K1−1−j1)
Uht,ns(j1 + j2).(14)
2) Light Traffic Users: If a light traffic user decides tobe a sensing user against K2 − 1 other light traffic users, theaverage payoff for it is,
Ult,s(J) =
⎧⎪⎪⎨⎪⎪⎩
U0(1− τi)− στJ − etxt(1− τi)
if J ∈ [1,K1 +K2] and τJ <= τi,
U0(1− τJ )− στ
J − etxt(1− τJ )
if J ∈ [1,K1 +K2] and τi <τJ < 1
(15)where τi =
Ti
T . If the light traffic user decides not to sense,its payoff is
Ult,ns(J) =
⎧⎨⎩
U0(1− τi)− etxt(1− τi)if J ∈ [1,K1 +K2 − 1],
0 if J = 0.(16)
Hence, the average utility for pure strategy ”sense”, for a lighttraffic user is,
U lt,s =
∑K2−1j2=0
∑K1
j1=0
(K2 − 1j2
)p2
j2(1− p2)(K2−1−j2)(
K1
j1
)p1
j1(1− p1)(K1−j1)Ult,s(j1 + j2 + 1),
(17)and the utility for pure strategy ”don’t sense”, for a light trafficuser is

� ��� ��� ��� ����
���
���
���
��
� ���
�
���
�
�������������������������������������������������������������������������
Fig. 3. Mixed strategy Nash equilibrium (p1, p2) wrt etxt and K1,K2
(σ = 0.4)
� ��� ��� ��� ��� ����
���
���
���
��
�
����
σ
�
�������������������������������������������������������������������������
Fig. 4. Mixed strategy Nash equilibrium wrt σ and K1,K2 (p1, p2) (etxt =0.2)
U lt,ns =
∑K2−1j2=0
∑K1
j1=0
(K2 − 1j2
)p2
j2(1− p2)(K2−1−j2)(
K1
j1
)p1
j1(1− p1)(K1−j1)Ult,ns(j1 + j2).
(18)Using equality of payoff theorem, the mixed strategy Nashequilibrium p1, p2 can be calculated by solving (19){
Uht,s = Uht,ns,U lt,s = U lt,ns.
(19)
C. Results and Analysis
Table I shows the parameters used for calculating the mixedstrategy Nash equilibrium p1, p2. Figure 3 shows the mixedstrategy Nash equilibrium wrt etxt. If the energy cost of datatransmission increases, the motivation to participate in sensingdecreases. It can also be seen from the figure that, for the samevalue of etxt, p1, p2 both decrease when K1,K2 increase. Thisis because, as there are more users, each user tries to take a freeride and becomes more reluctant to contributing in sensing.Another observation here is that, the heavy traffic users takemore responsibility of sensing (p2 < p1) since they will bethe ones to lose more if no user performs sensing.
Figure 4 shows p1, p2 wrt σ. Both p1, p2 decrease as thesensing energy cost increases. In this case also, for the samevalue of σ, p1, p2 both decrease when K1,K2 increase. Similarto Figure 3, p2 is less than p1.
IV. SPECTRUM SENSING AS AN EVOLUTIONARY GAME
In the spectrum sensing game discussed above, solving(19), becomes difficult as K1,K2 increase. Apart from that,
it requires the knowledge of the average utility functions andit also includes the exchange of private information of eachuser. This may not be realistic in a decentralized environment.Therefore, a distributed learning algorithm is necessary wherethe users try different strategies in each run and evolve overtime. Such an evolution of a population can be modeled usingreplicator dynamics from evolutionary game theory.
A. Learning in the Game
Let pb,sj (t) denote the probability that user sj adoptsstrategy b ∈ A at time t. Then, the evolution dynamics ofthe population share that currently take pure strategy b ∈ A is
pb,sj =1
Usj (p)[Usj (b, p−sj )− Usj (p)]p(b,sj), (20)
where Usj (b, p−sj ) is the average payoff for player sj usingpure strategy b and Usj (p) is the average payoff of user sjusing mixed strategy psj [8]. The probability of taking strategyb for user sj can be adjusted using
pb,sj ((m+ 1)T ) = pb,sj (mT ) + ηsj pb,sj (mT ) (21)
where ηsj is the step-size of adjustment chosen by user sj andm is an integer representing time index.
B. Equilibrium Analysis for Two User Case
If we consider light traffic and heavy traffic users, the gameis between heterogeneous players. When the number of usersis high, it is difficult to find the closed-form expressions for theevolutionarily stable strategy (ESS) of an evolutionary game.So, we start with the two-user game with one heavy trafficuser and one light traffic user.
As we observed in section III-C, the mixed strategy Nashequilibrium gives p2 < p1. However, our objective is todesign the game such that light traffic users contribute more insensing. For this purpose, we introduce the control parametersβ1, β2 in the utility functions where β1 > 0 is the punishmentfactor for light traffic users if they do not contribute insensing and β2 > 0 is the reward factor for them when theyperform sensing. Without loss of generality we assume thatβ1 = β2 = β.
The payoff table for a 2 user sensing game is shown inTable II, where Uht,11 = U0(1 − τ
2 ) − σ τ2 − etxt(1 − τ
2 ),Uht,12 = U0(1 − τ) − στ − etxt(1 − τ), Uht,21 = U0 − etxt,Uht,22 = 0, Ult,11 = U0tthpt1−σ τ
2 −etxttthpt1+βτi, Ult,12 =U0(1 − τi) − etxt(1 − τi) − βτi, Ult,21 = U0tthpt2 − στ −etxttthpt2 + βτi, Ult,22 = 0, tthpt1 = (1 − τi) if τ
2 <= τi,tthpt1 = (1− τ
2 ) if τ2 > τi, tthpt2 = (1− τi) if τ <= τi and
tthpt2 = (1− τ) if τ > τi.Using replicator dynamics, we obtain 4 pure strategy equi-
libria: (0, 0), (0, 1), (1, 0)and(1, 1) and one mixed strategyequilibrium: (− Ult,21
(Ult,11−Ult,21−Ult,12),− Uht,12
(Uht,11−Uht,12−Uht,21))
for the above two player game. The mixed strategy Nashequilibrium is not an ESS. Among pure equilibria, the desiredESS is (0, 1) such that the strategy of the heavy traffic user

TABLE IPARAMETERS USED FOR ANALYSIS
Parameters ValuesPD 0.95SNR −14dBτ 0.5fs 1 MHzCH0 1 Mbps
TABLE IIPAYOFF TABLE FOR A HETEROGENEOUS 2 USER SENSING GAME
sense not-sensesense (Uht,11, Ult,11) (Uht,12, Ult,12)not-sense (Uht,21, Ult,21) (Uht,22, Ult,22)
converges to ”not-sense” and the strategy of the light trafficuser converges to ”sense”. The game can be made converge tothis equilibrium if Uht,11 < Uht,21, Uht,12 > Uht,22, Ult,11 >Ult,12 and Ult,21 > Ult,22. This condition can be achieved byassigning appropriate value to β.
C. Results and Analysis
The parameters used for analysis are shown in Table I.When there is only one light traffic user, its probability ofsensing approaches 1 while the heavy traffic user enjoys thefree ride as shown in Figure 5. When there are multiplelight traffic users, they volunteer for cooperative sensing withalmost equal probability (mixed strategy equilibrium), whileheavy traffic users do not have the sensing responsibility asdepicted in Figure 6. The equilibrium in this case is (0, p2).In case of a two heterogeneous user game, the mixed strategyequilibrium, is not an ESS. In case of a two homogeneoususer game, both (0, 1) and (1, 0) are ESSs, and the game issymmetric. Consequently, the mixed strategy Nash equilibriumis an ESS as well for this game. Therefore, when there aremultiple players of different types, the players of one typeof population are homogeneous and the mixed strategy Nashequilibrium is an ESS among them.
In the proposed game, When τi < τ and there is onlyone light traffic user, the sensing cost is high for it. However,the reduction in its throughput is less than the correspondingreduction in throughput for the heavy traffic user. When
� ��� ��� ��� ��� ��� ����
���
���
���
��
���
���� ������� ��� �!�
� ��� ��� ��� ��� ��� ����
���
�
"���
� ���
���� ������� ��� �!�
Fig. 5. Behavior dynamics of 2 users (K1 = 1, K2 = 1, σ = 0.4, β = 0.15,etxt = 0.2, τ = 0.5, τi = 0.2)
� ��� ��� ����
���
���
���
��
���
� ��� ��� ����
���
���
���
��
���
� ��� ��� ����
���
���
���
��
���
� ��� ��� ����
���
���
���
��
���
� ��� ��� ����
���
���
"���
� ���
� ��� ��� ����
���
���
"���
� ���
� ��� ��� ����
���
���
"���
� ���
���� ������� ��� �!�� ��� ��� ���
�
���
���
"���
� ���
���� ������� ��� �!�
Fig. 6. Behavior dynamics of 8 users (K1 = 4, K2 = 4, σ = 0.4, β = 0.15,etxt = 0.2, τ = 0.5, τi = 0.2)
K2 > 1, the sensing cost is shared, thus making it moreaffordable for light traffic users to sense.
V. CONCLUSION
We modeled a spectrum sensing game comprising of heavytraffic users and light traffic users using non-cooperative gametheory. Using the concept of mixed strategy Nash equilibrium,we showed that the light traffic users tend to contribute lessin sensing because of the heterogeneity. For a distritributedscenario, we designed the game using evolutionary gametheory such that as long as light traffic users are present, heavytraffic users do not perform sensing, while light traffic usersshare the sensing responsibility and the evolution dynamicswas shown to converge to ESS for the case of multiple heavytraffic and light traffic users.
ACKNOWLEDGMENT
This research is partly supported by the SUTD grant no.SRG-EPD-2010-005.
REFERENCES
[1] J. Mitola, Cognitive Radio for Flexible Mobile Multimedia Communica-tions, Proc. of IEEE Workshop on Mobile Multimedia Communication,pp. 3-10, 1999.
[2] I. F. Akyildiz, W. Y. Lee, M. C. Vuran, S. Mohanty, NeXt Genera-tion/Dynamic Spectrum Access/Cognitive Radio Wireless Networks: Asurvey, Computer Networks, Sept. 2006.
[3] K. B. Letaief and W. Zhang, Cooperative Spectrum Sensing, BookChapter, Cognitive Wireless Communication Networks, Springer US,pages 115-138.
[4] X. Chen, Z. Bie and W. Wu, Detection efficiency of cooperative spectrumsensing in cognitive radio network , The Journal of China Universitiesof Posts and Telecommunications Sept. 2006.
[5] J.Unnikrishnan and V. V. Veeravalli, Cooperative Spectrum Sensing andDetection for Cognitive Radio, IEEE Globecom 2007, Washington DC,November 2007.
[6] H. N. Pham, Y. Zhang, P. E. Engelstad, T. Skeie and F. Eliassen, OptimalCooperative Spectrum Sensing in Cognitive Sensor Networks,IWCMC09, Leipzig, Germany, June 2009.
[7] S. Maharjan, Y. Zhang and S. Gjessing, Economic Approaches forCognitive Radio Networks: A Survey, SI, CogCOM, Springer WirelessPersonal Communications, accepted.
[8] B. Wang, K. J. R. Liu and T. C. Clancy, Evolutionary CooperativeSpectrum Sensing Game: How to Collaborate, IEEE Transactions onCommunications, Volume: 58 , Issue 3, pp. 890-900, March 2010.
[9] D. Challet and Y. Zhang Emergence of Cooperation and Organizationin an Evolutionary Game, Physica A, 246:407 418, 1997.


















