Distributed Computing Group Locality and the Hardness of Distributed Approximation Thomas Moscibroda...
39
Distributed Computing Group Locality and the Hardness of Distributed Approximation Thomas Moscibroda Joint work with: Fabian Kuhn, Roger Wattenhofer
-
date post
21-Dec-2015 -
Category
Documents
-
view
218 -
download
2
Transcript of Distributed Computing Group Locality and the Hardness of Distributed Approximation Thomas Moscibroda...
DistributedComputing
Group
Locality and the Hardness of Distributed Approximation
Thomas Moscibroda
Joint work with: Fabian Kuhn, Roger Wattenhofer
Thomas Moscibroda @ DANSS 2004 2
Locality...
• Communication in multi-hop networks is inherently local !• Issue of locality is crucial in distributed systems!
• Direct communication only between neighbors• Obtaining information about distant nodes requires
multi-hop communication
Obtaining information from entire network
requires plenty of communication!
Thomas Moscibroda @ DANSS 2004 3
Locality...
• Many modern networks are large-scale and highly complex– Internet– Peer-to-Peer Networks– Wireless Sensor Networks
• Or even dynamic...– Wireless Ad Hoc Networks
No node has global information
Each node has information from its vicinity only
(local information)
Yet, nodes have to come up with a global goal!
Thomas Moscibroda @ DANSS 2004 4
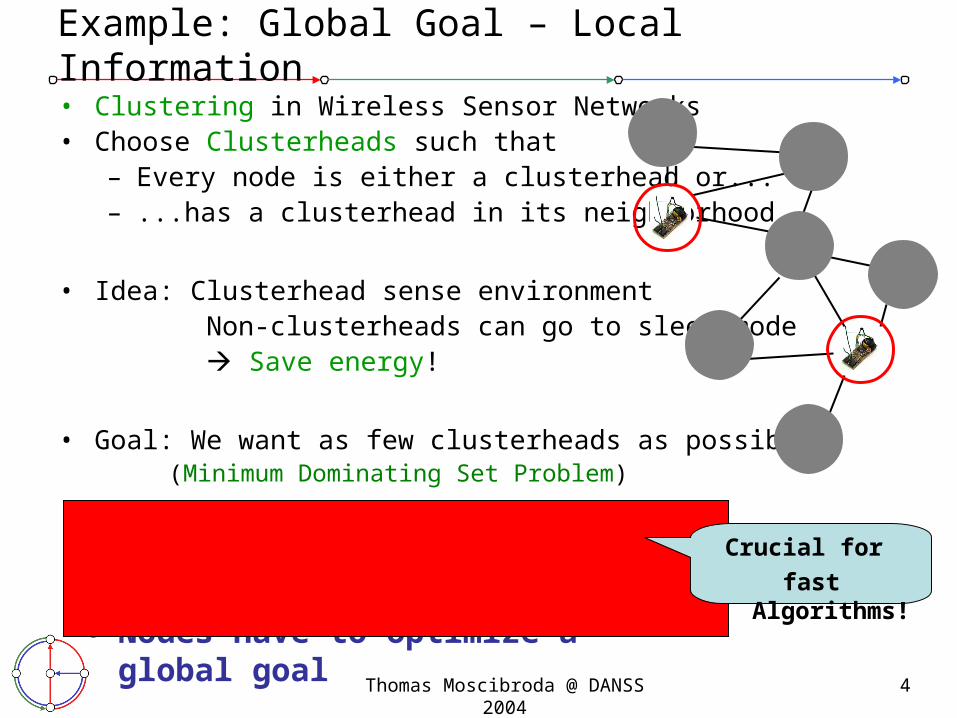
Example: Global Goal – Local Information
• Clustering in Wireless Sensor Networks• Choose Clusterheads such that
– Every node is either a clusterhead or...– ...has a clusterhead in its neighborhood.
• Idea: Clusterhead sense environment Non-clusterheads can go to sleep mode Save energy!
• Goal: We want as few clusterheads as possible! (Minimum Dominating Set Problem)
Nodes have only local information
Nodes have to optimize a global goal
Crucial for
fast Algorithms!
Thomas Moscibroda @ DANSS 2004 5
k-Neighborhood
• What does „local“ mean ? • How far does „locality“ go?• Neighborhood, 2-Hop Neighborhood,... or something else...???
In communication round:123
Thomas Moscibroda @ DANSS 2004 6
k-Neighborhood
In k rounds of communication...
... each node can gather information
only from k-neighborhood!
• If message size is unbounded:
Entire information from k-neighborhood
(IDs, topology, edge-weights,...)
can be collected!
• If message size is bounded:
Only subset of this information can be gathered.
Strongest model
for lower bounds
on locality!
Thomas Moscibroda @ DANSS 2004 7
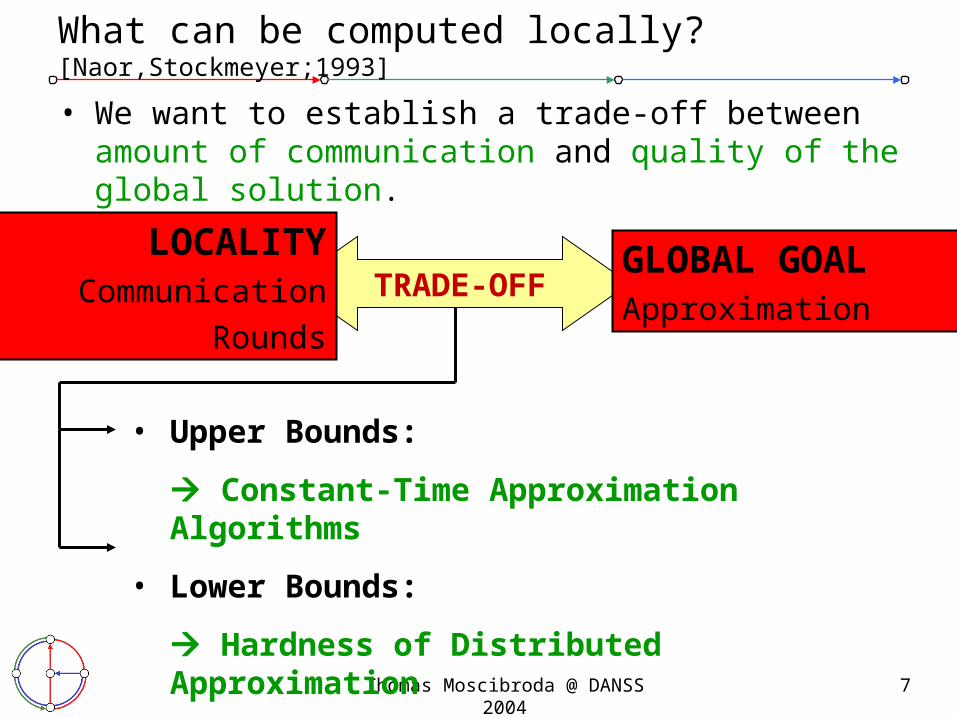
What can be computed locally? [Naor,Stockmeyer;1993]
• We want to establish a trade-off between amount of communication and quality of the global solution.
TRADE-OFFLOCALITY
Communication
Rounds
GLOBAL GOALApproximation
• Upper Bounds:
Constant-Time Approximation Algorithms
• Lower Bounds:
Hardness of Distributed Approximation
Thomas Moscibroda @ DANSS 2004 8
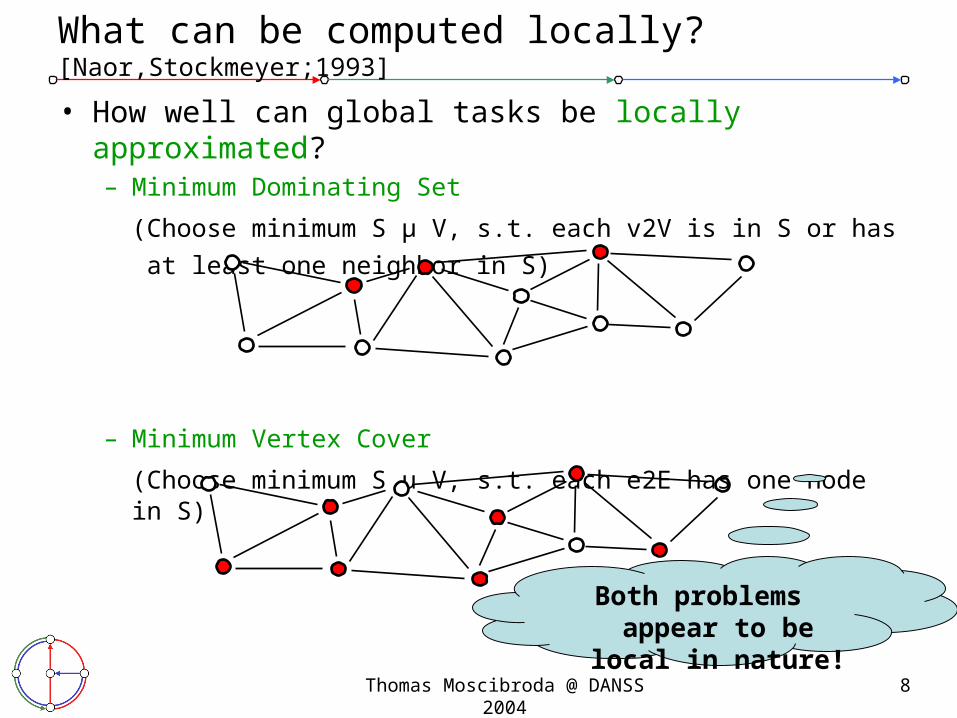
What can be computed locally? [Naor,Stockmeyer;1993]
• How well can global tasks be locally approximated?– Minimum Dominating Set
(Choose minimum S µ V, s.t. each v2V is in S or has
at least one neighbor in S)
– Minimum Vertex Cover
(Choose minimum S µ V, s.t. each e2E has one node in S)
Both problems appear to be local in
nature!
Thomas Moscibroda @ DANSS 2004 9
What can be computed locally? [Naor,Stockmeyer;1993]
An answer to the previous question...
...helps in answering the following question about
exact variants of the problems.
How large must the locality be in order to compute a maximal independent set or maximal matching?
An answer to this question implies important
time-lower bounds for distributed algorithms!
Thomas Moscibroda @ DANSS 2004 10
Overview
• Introduction to Locality
• Related Work
• Vertex Cover Upper Bound
• Vertex Cover Lower Bound
• Conclusions & Open Problems
Thomas Moscibroda @ DANSS 2004 11
Related Work
On Locality
• Naor, Stockmeyer 1993: Which locally checkable labelings can be computed in constant time? [Naor,Stockmeyer;1993]
• O(log n) algorithm for maximal independent set [Luby;1986]
O(log n) algorithm for maximal matching [Israeli, Itai;1986]
• 3-coloring in a ring in O(log*n) time [Cole, Vishkin;1986]
• O(log*n) was shown to be optimal by Linial [Linial;1992]
Only previous lower bound on locality!
Thomas Moscibroda @ DANSS 2004 12
Related Work
On Distributed Approximation Upper Bounds (examples...)
– Minimum Dominating Set Problem[Jia, Rajaraman, Suel; 2001] [Kuhn, Wattenhofer; 2003],...
– Minimum Edge-Coloring[Panconesi, Srinivasan; 1997],...
– General covering and packing problems[Bartal, Byers, Raz; 1997][Kuhn, Moscibroda, Wattenhofer;
submitted]
– Facility Location
Lower Bounds– Results based on Linials (log*n) lower bound– Recently, strong lower bound on the distributed approximability
for the MST. [Elkin; 2004]
For general graphs, we
drastically improve this result.
Thomas Moscibroda @ DANSS 2004 13
Overview
• Introduction to Locality
• Related Work
• Vertex Cover Upper Bound
• Vertex Cover Lower Bound
• Conclusions & Open Problems
Thomas Moscibroda @ DANSS 2004 14
Minimum Vertex Cover
• We consider the most basic coordination Problem
Minimum Vertex Cover (MVC)
Choose as few nodes as possible to cover all edges
• We give an approximation algorithm with...
O(k) communication rounds
O(1/k) approximation
O(log n) bits message size
• General idea: Consider the integer linear program of MVC. • Distributed Primal-Dual Approach
Thomas Moscibroda @ DANSS 2004 15
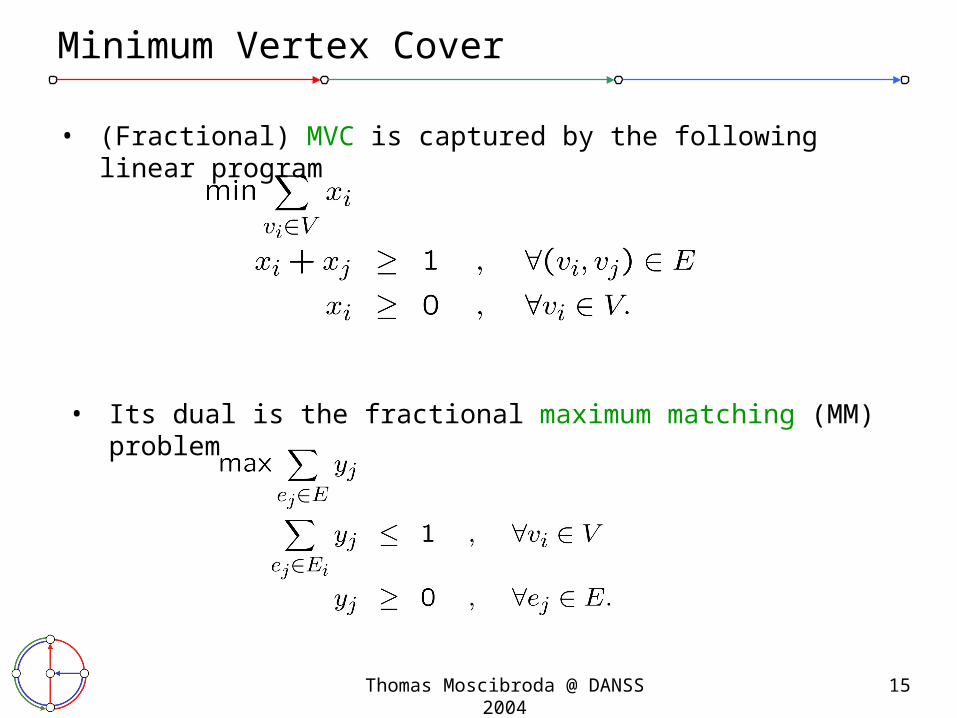
Minimum Vertex Cover
• (Fractional) MVC is captured by the following linear program
• Its dual is the fractional maximum matching (MM) problem
Thomas Moscibroda @ DANSS 2004 16
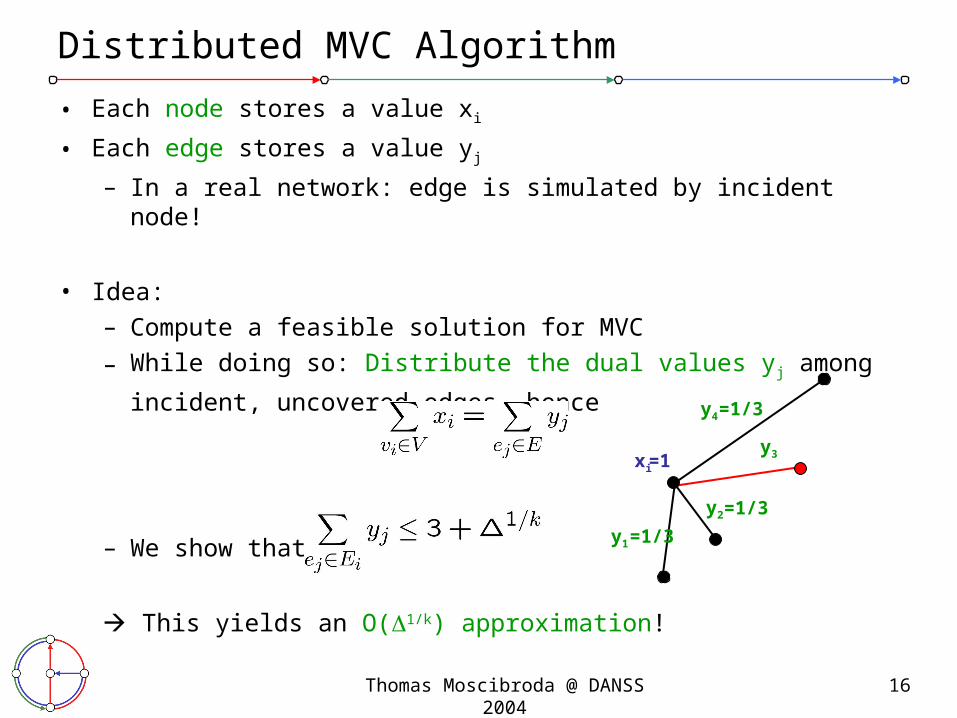
• Each node stores a value xi
• Each edge stores a value yj
– In a real network: edge is simulated by incident node!
• Idea: – Compute a feasible solution for MVC
– While doing so: Distribute the dual values yj among
incident, uncovered edges, hence
– We show that
This yields an O(1/k) approximation!
Distributed MVC Algorithm
y1
y2
y3xi=1
=1/3
=1/3
y4=1/3
Thomas Moscibroda @ DANSS 2004 17
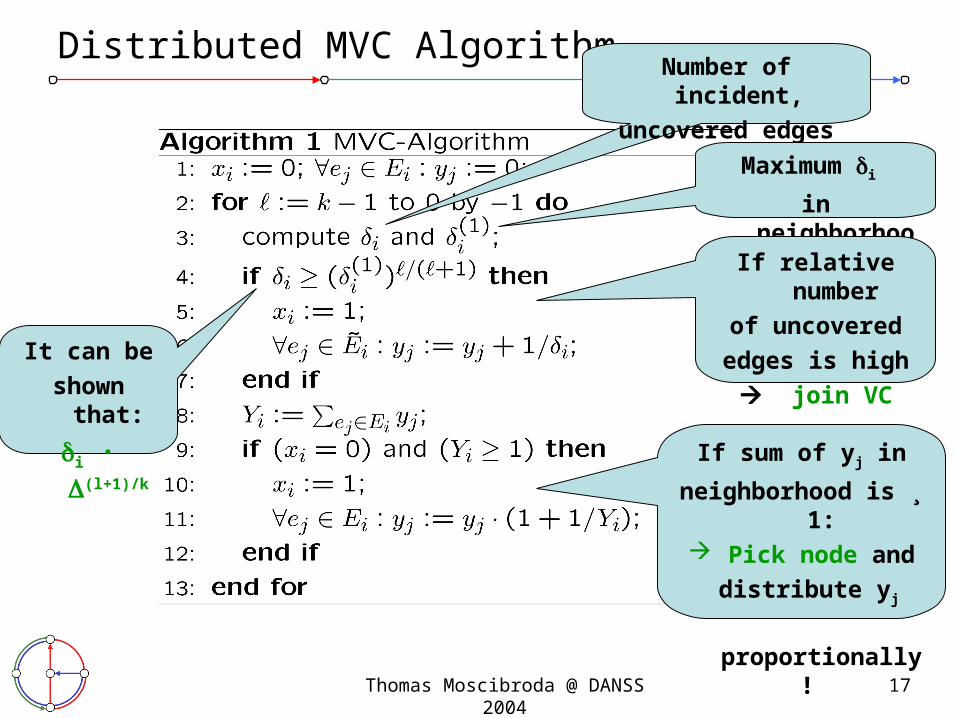
Distributed MVC AlgorithmNumber of incident,
uncovered edges
Maximum i
in neighborhood
If relative number
of uncovered
edges is high
join VC
If sum of yj in
neighborhood is ¸ 1: Pick node and
distribute yj
proportionally!
It can be
shown that:
i · (l+1)/k
Thomas Moscibroda @ DANSS 2004 18
Analysis
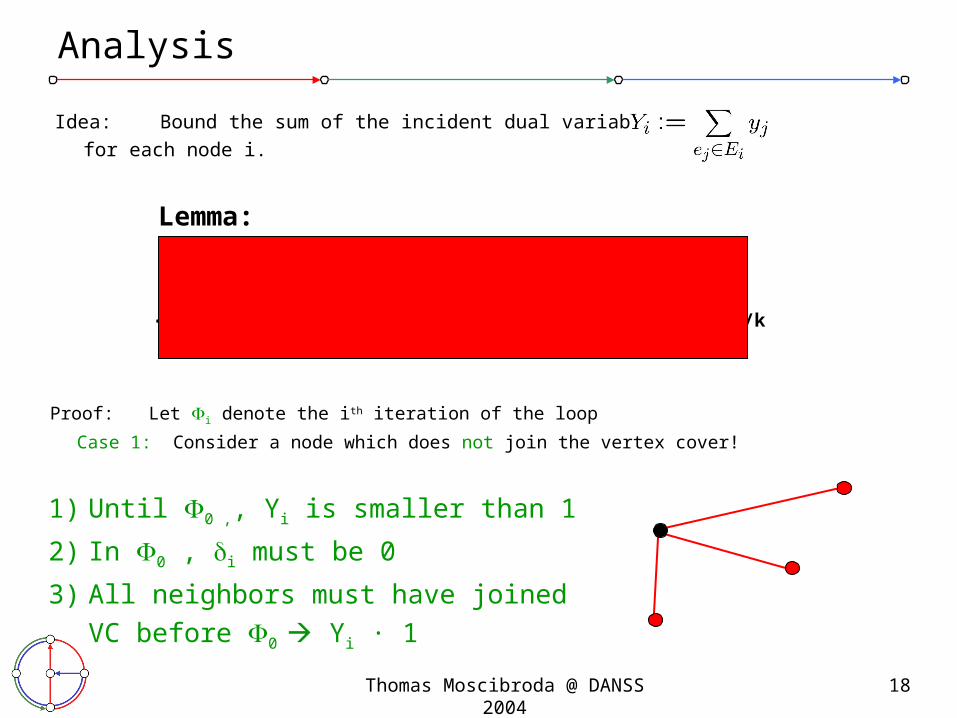
Lemma:
At the end of the algorithm,
for all nodes vi 2 V: Yi · 3+1/k
Idea: Bound the sum of the incident dual variables
for each node i.
Proof: Let i denote the ith iteration of the loop
Case 1: Consider a node which does not join the vertex cover!
1) Until 0 ,, Yi is smaller than 1
2) In 0 , i must be 0
3) All neighbors must have joined
VC before 0 Yi · 1

Thomas Moscibroda @ DANSS 2004 19
• Before l: Yi · 1
• During l:
• xi := 1 Yi · 2
• neighbors vk may join
VC, too increase Yi
• All these nodes have k ¸ i(1) l/(l+1) ¸ i
l/(l+1)
• We get at most 1/k from each of the v
uncovered neighbors! v / k · 1/k
Analysis
Case 2: Consider a node that joins
VC in line 5 of iteration l.
before l :
vi
0.3 0
0
0
during l :
0.33
0.33
0.33vk
0.62
Yi · 3+1/k
Additional
nodes joining VC
can increase Yi
by at most 1
Case 3 is similar
Thomas Moscibroda @ DANSS 2004 20
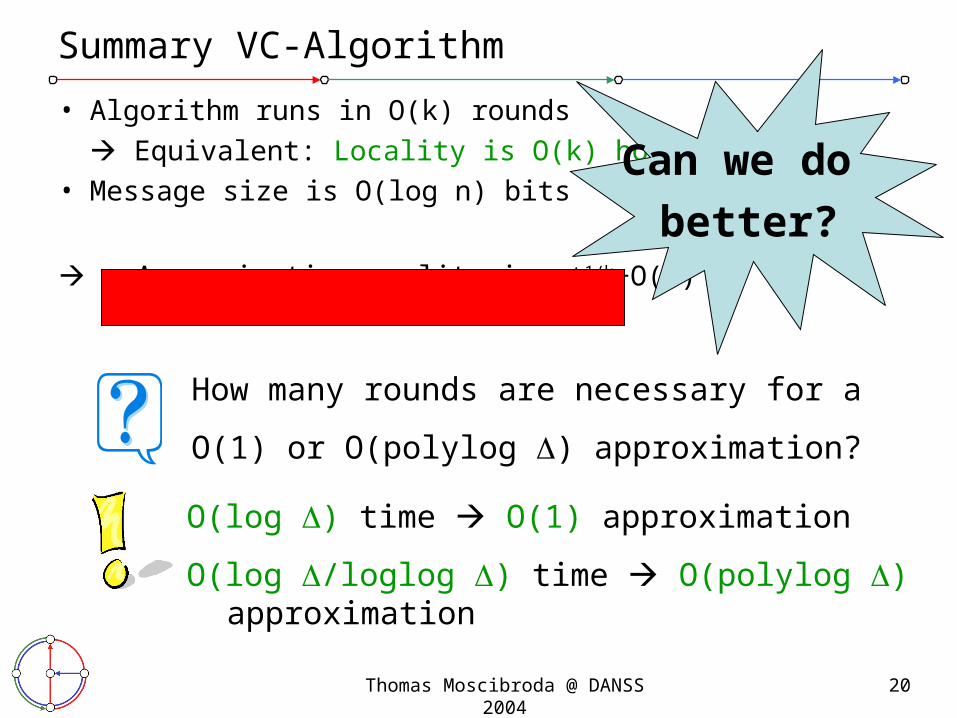
Summary VC-Algorithm
• Algorithm runs in O(k) rounds
Equivalent: Locality is O(k) hops! • Message size is O(log n) bits
Approximation quality is 1/k+O(1)
How many rounds are necessary for a
O(1) or O(polylog ) approximation?
O(log ) time O(1) approximation
O(log /loglog ) time O(polylog ) approximation
Can we do
better?
Thomas Moscibroda @ DANSS 2004 21
Overview
• Introduction to Locality
• Related Work
• Vertex Cover Upper Bound
• Vertex Cover Lower Bound
• Conclusions & Open Problems
Thomas Moscibroda @ DANSS 2004 22
Model
• Network graph = graph on which we compute VC
• Nodes have unique identifiers
• Message size and local computation are unbounded
• Strongest possible model for lower bounds Lower bounds are consequence of locality alone
Thomas Moscibroda @ DANSS 2004 23
Basic Idea
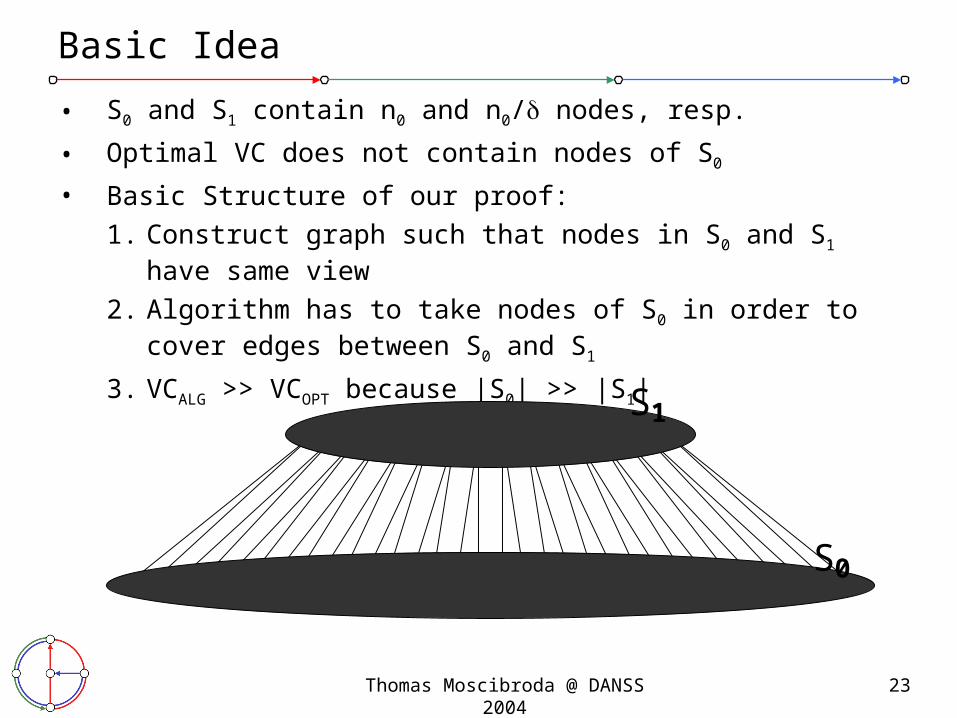
• S0 and S1 contain n0 and n0/ nodes, resp.
• Optimal VC does not contain nodes of S0
• Basic Structure of our proof:
1. Construct graph such that nodes in S0 and S1 have same view
2. Algorithm has to take nodes of S0 in order to cover edges between S0 and S1
3. VCALG >> VCOPT because |S0| >> |S1|
S0
S1
Thomas Moscibroda @ DANSS 2004 24
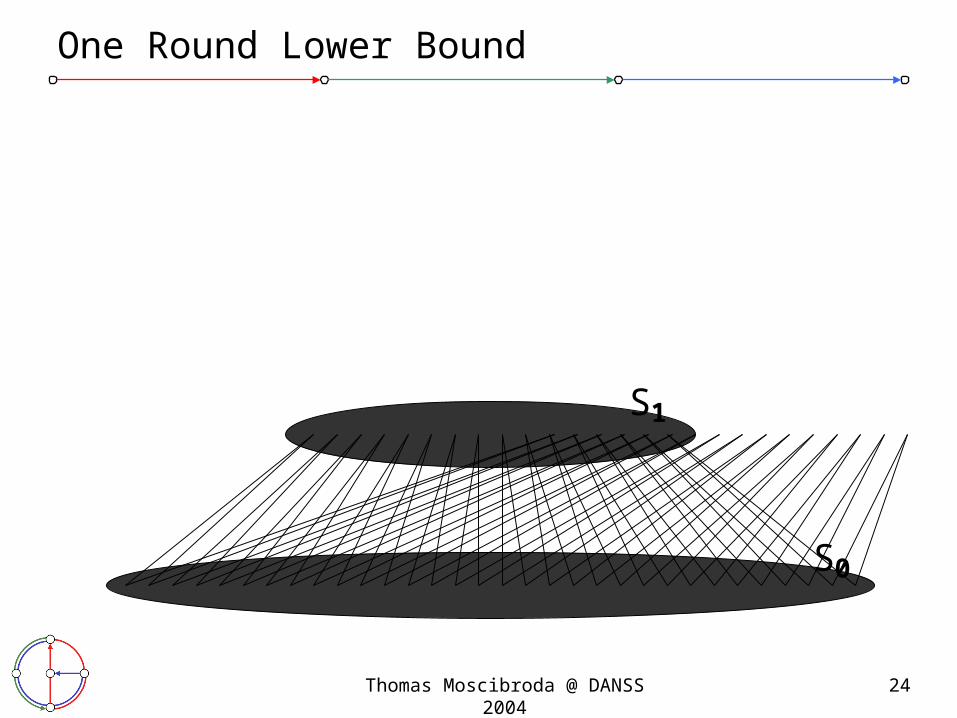
One Round Lower Bound
S1
S0
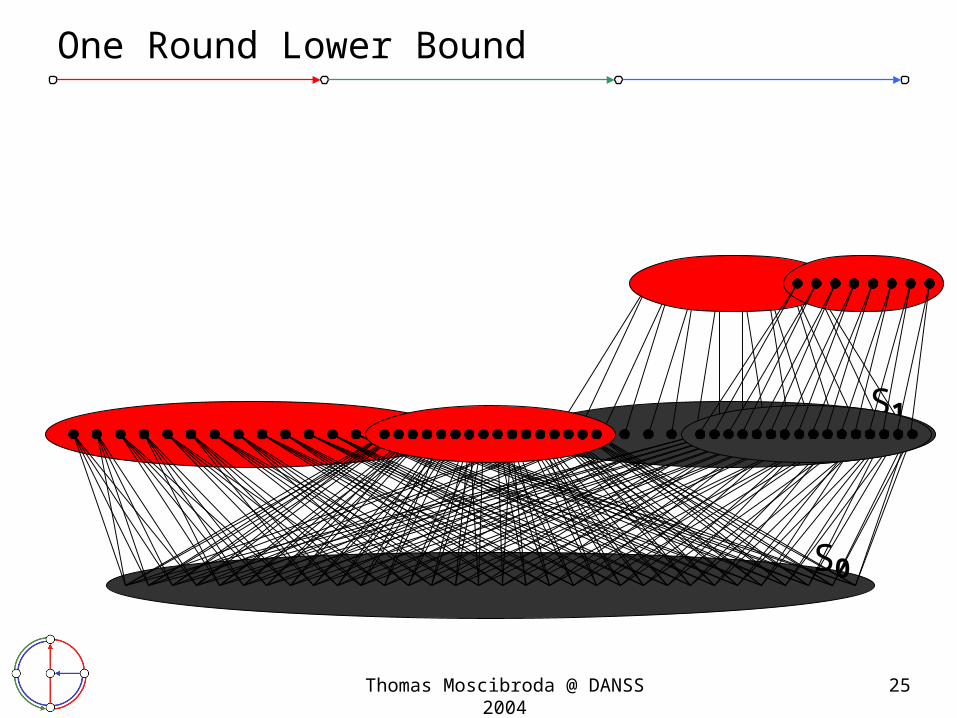
Thomas Moscibroda @ DANSS 2004 25
One Round Lower Bound
S0
S1
Thomas Moscibroda @ DANSS 2004 26
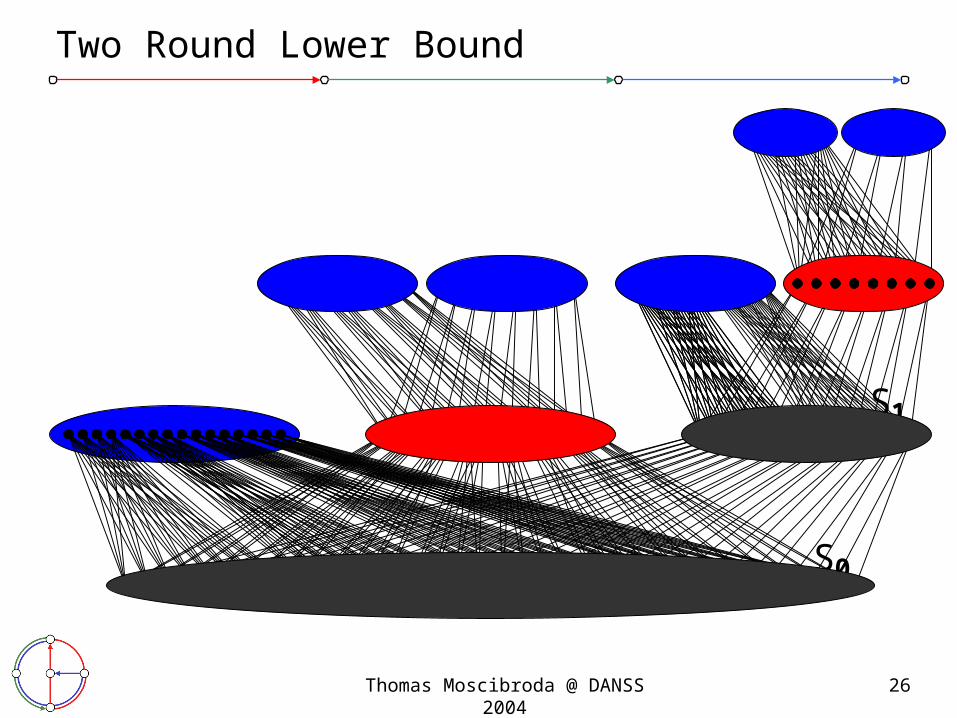
S0
S1
Two Round Lower Bound
Thomas Moscibroda @ DANSS 2004 27
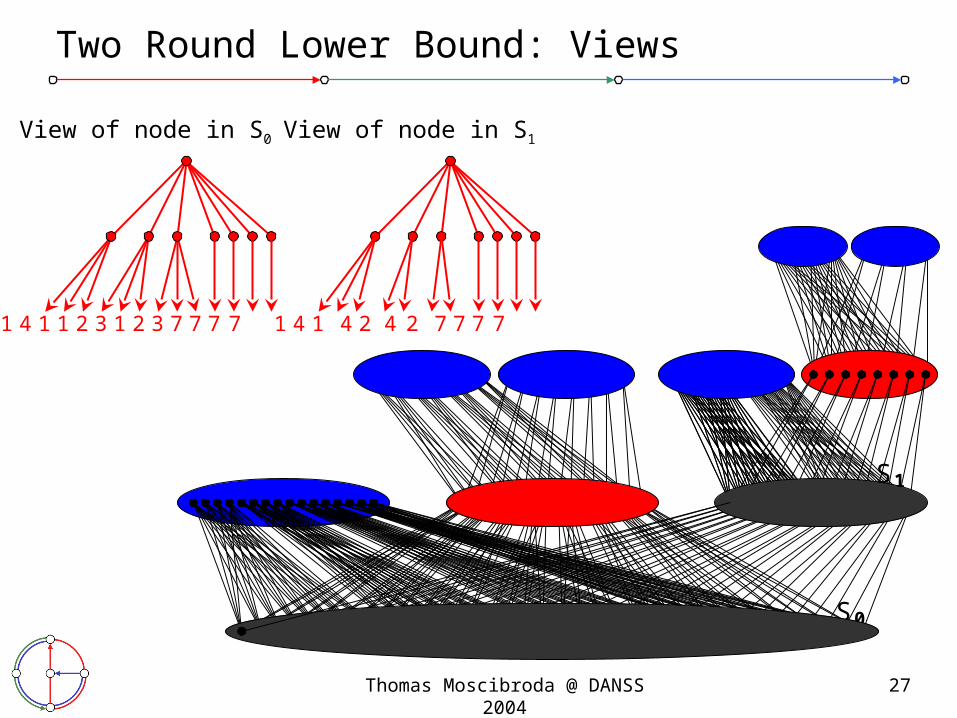
S0
S1
7 77 77 77 73 21 34 11 21 44 224 11
View of node in S0 View of node in S1
Two Round Lower Bound: Views
Thomas Moscibroda @ DANSS 2004 28
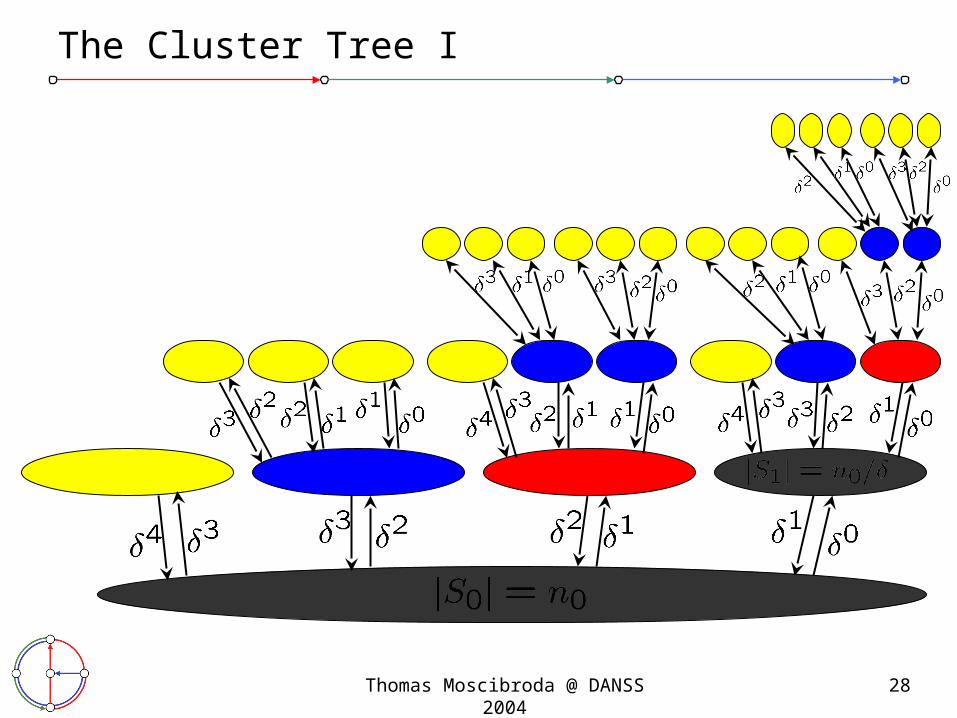
The Cluster Tree I
Thomas Moscibroda @ DANSS 2004 29
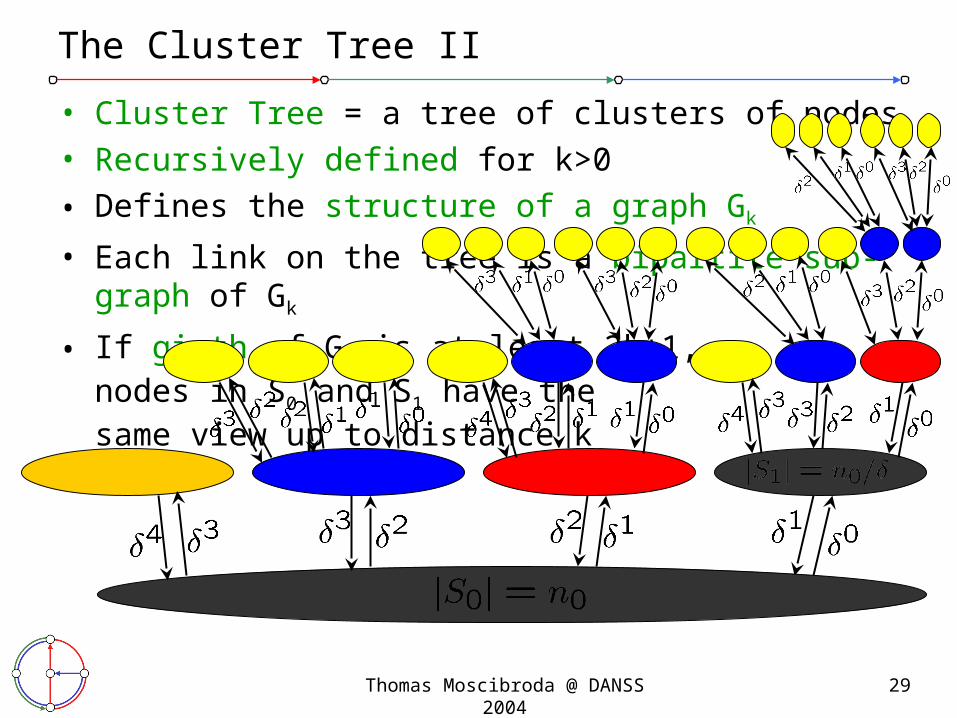
The Cluster Tree II
• Cluster Tree = a tree of clusters of nodes• Recursively defined for k>0
• Defines the structure of a graph Gk
• Each link on the tree is a bipartite sub-graph of Gk
• If girth of Gk is at least 2k+1, nodes in S0 and S1 have the same view up to distance k
Thomas Moscibroda @ DANSS 2004 30
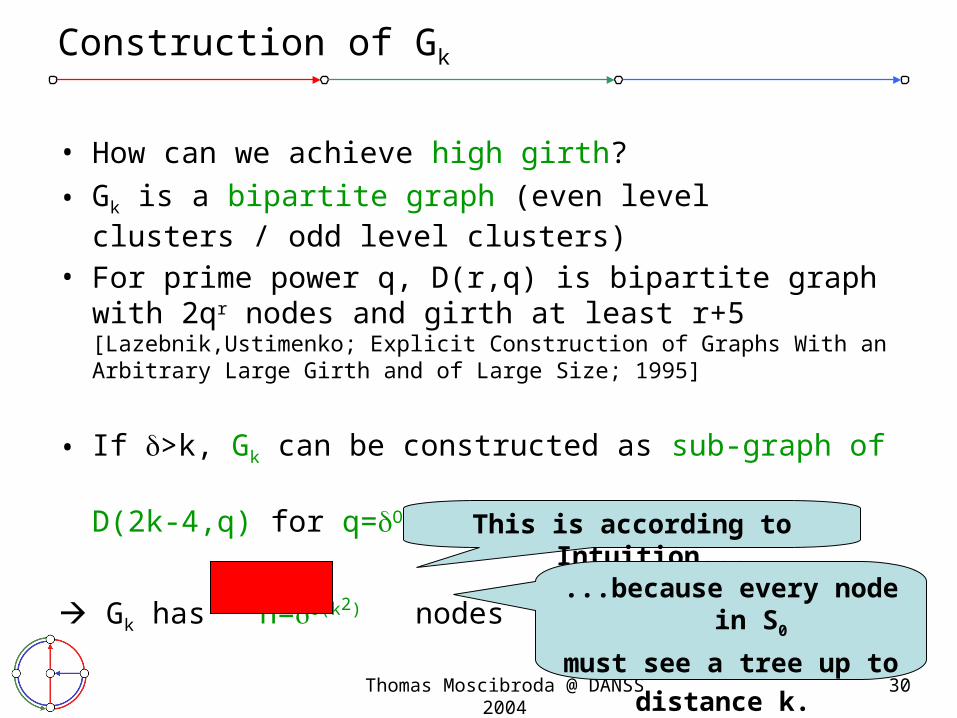
Construction of Gk
• How can we achieve high girth?
• Gk is a bipartite graph (even level clusters / odd level clusters)
• For prime power q, D(r,q) is bipartite graph with 2qr nodes and girth at least r+5[Lazebnik,Ustimenko; Explicit Construction of Graphs With an Arbitrary Large Girth and of Large Size; 1995]
• If >k, Gk can be constructed as sub-graph of D(2k-4,q) for q=O(k)
Gk has n=O(k2) nodes
This is according to Intuition...
...because every node in S0
must see a tree up to
distance k.
Thomas Moscibroda @ DANSS 2004 31
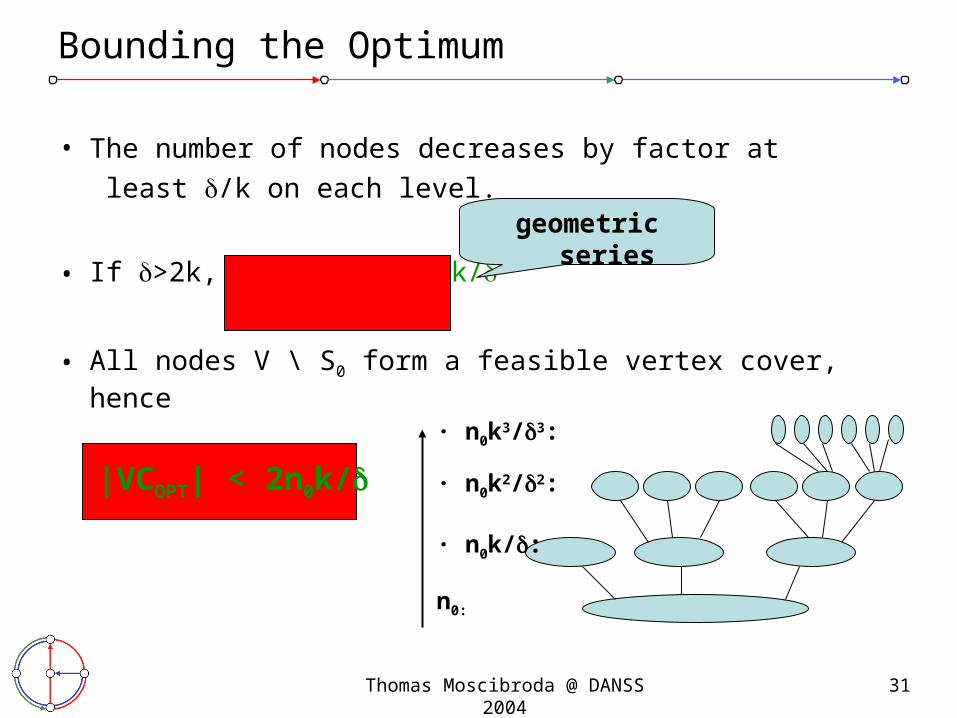
Bounding the Optimum
• The number of nodes decreases by factor at
least /k on each level.
• If >2k, n < n0+2n0k/
• All nodes V \ S0 form a feasible vertex cover, hence
|VCOPT| < 2n0k/
n0:
· n0k/:
· n0k2/2:
· n0k3/3:
geometric series
Thomas Moscibroda @ DANSS 2004 32
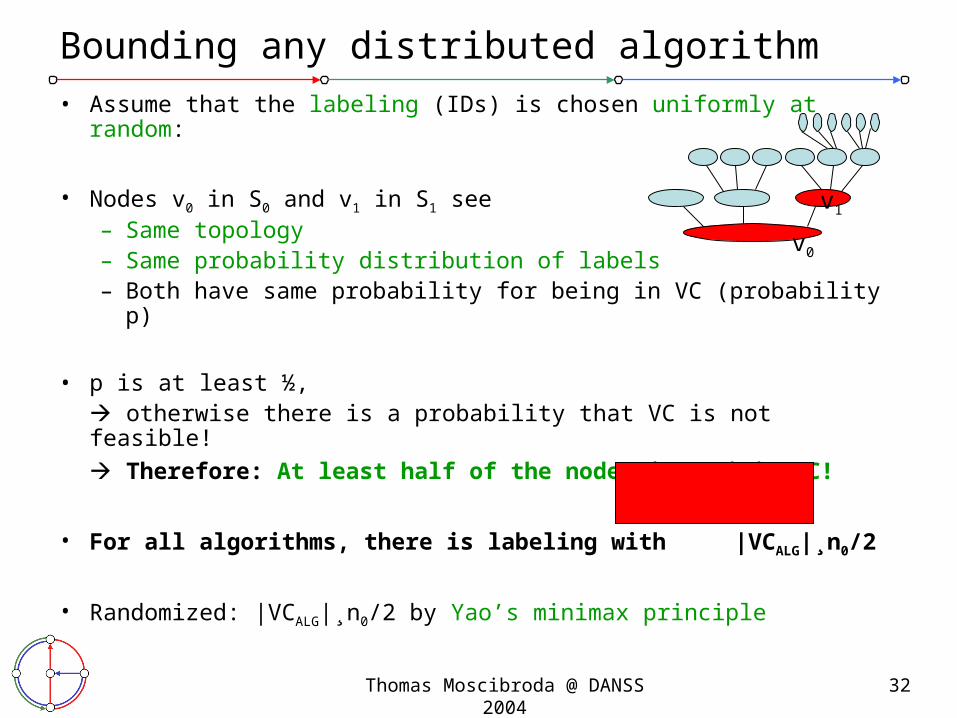
Bounding any distributed algorithm
• Assume that the labeling (IDs) is chosen uniformly at random:
• Nodes v0 in S0 and v1 in S1 see– Same topology– Same probability distribution of labels– Both have same probability for being in VC (probability p)
• p is at least ½, otherwise there is a probability that VC is not feasible!
Therefore: At least half of the nodes in S0 join VC!
• For all algorithms, there is labeling with |VCALG|¸n0/2
• Randomized: |VCALG|¸n0/2 by Yao’s minimax principle
v0
v1
Thomas Moscibroda @ DANSS 2004 33
Approximation Lower Bound
• We have |VCALG| ¸ n0/2 and |VCOPT| < 2n0k/
Approximation ¸ |VCALG|/|VCOPT| > /(4k)
• n = O(k2), = k+1
In k communication rounds, no
algorithm can approximate MVC
better than nc/k2/k) or (1/k/k)
Thomas Moscibroda @ DANSS 2004 34
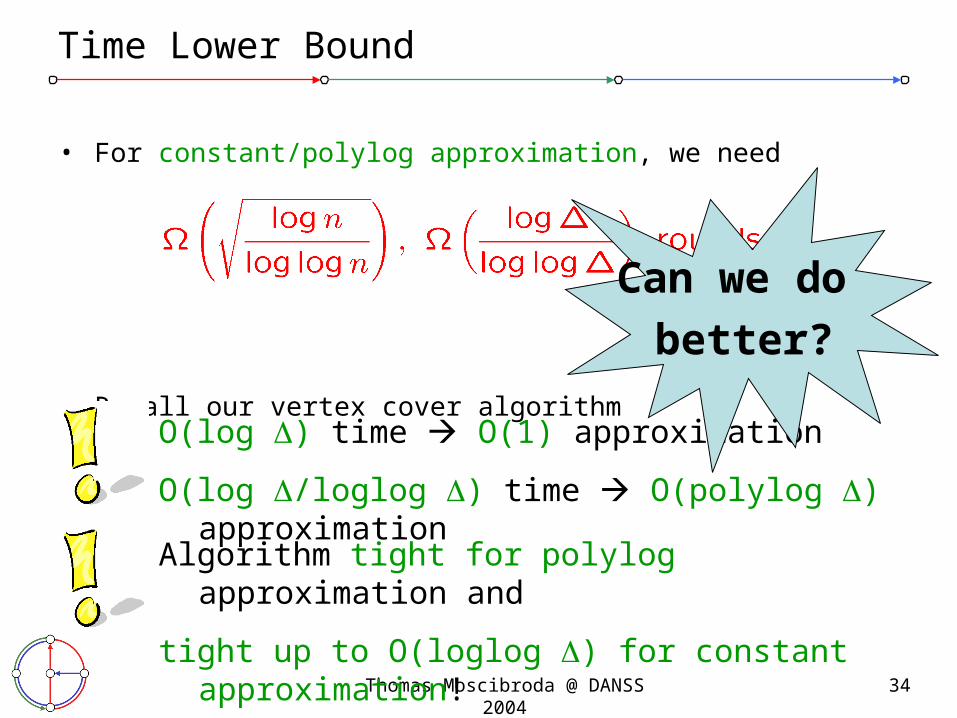
Time Lower Bound
• For constant/polylog approximation, we need
• Recall our vertex cover algorithm
O(log ) time O(1) approximation
O(log /loglog ) time O(polylog ) approximation
Can we do
better?
Algorithm tight for polylog approximation and
tight up to O(loglog ) for constant approximation!
Thomas Moscibroda @ DANSS 2004 35
Hardness of Approximation Exact Problems
• Approximation Theory is very active area of research
(see STOC, FOCS, SODA,...)
• Study of lower bounds on approximation
Hardness of Approximation!
• This has lead to new insight in complexity theory (PCP,...)
Study of
Approximability
Better understanding
of exact problems!
Thomas Moscibroda @ DANSS 2004 36
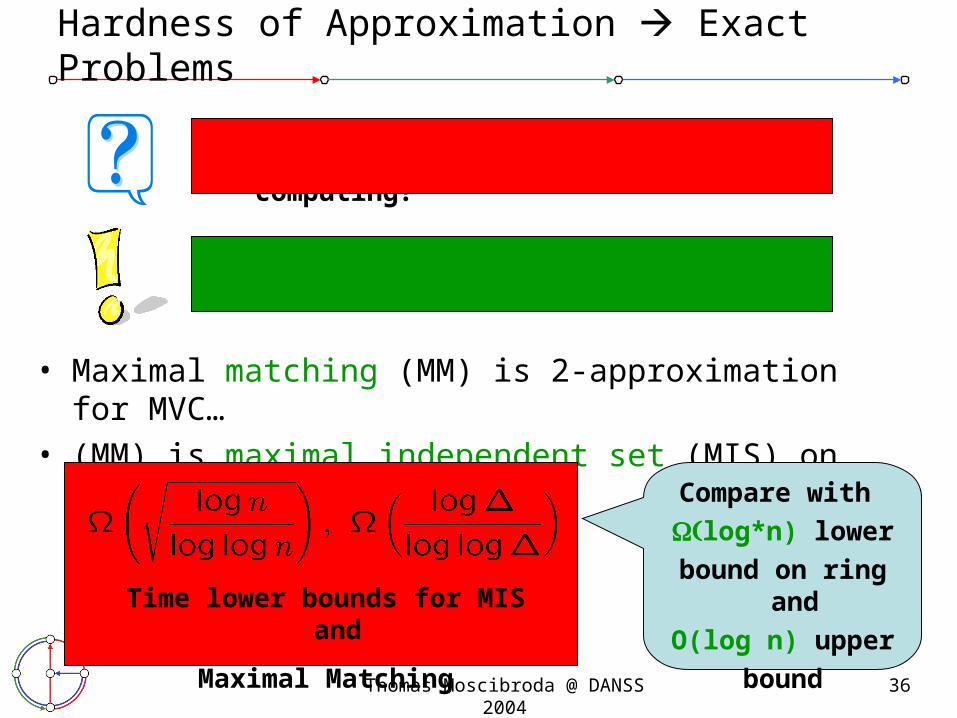
Hardness of Approximation Exact Problems
• Maximal matching (MM) is 2-approximation for MVC…• (MM) is maximal independent set (MIS) on line graph, …
Does the same hold in distributed computing?
To some degree, it does....!
Time lower bounds for MIS and
Maximal Matching
Compare with
log*n) lower
bound on ring and
O(log n) upper
bound
Thomas Moscibroda @ DANSS 2004 37
What about Dominating Sets ?
• For each VC instance, there is graph on which dominating set is the same
MVC bounds also hold for MDS
• Approximation lower bound can also be extended to maximum matching (more than just a reduction)
Thomas Moscibroda @ DANSS 2004 38
Conclusions
• Locality is vital in distributed systems. • Not much is known so far...
• In this talk, lower bounds on local computation
tight up to a factor of
and
Vertex Cover, Dominating Set, Maximum Matching,
MIS, Maximal Matching,...
• The hardness of distributed approximation is an
interesting research topic
Thomas Moscibroda @ DANSS 2004 39
DistributedComputing
Group
Questions?Comments?