

Distributed Computing 8. Impossibility of consensus Shmuel Zaks [email protected] ©
72
-
Upload
reginald-black -
Category
Documents
-
view
213 -
download
1
Transcript of Distributed Computing 8. Impossibility of consensus Shmuel Zaks [email protected] ©

2
ConsensusConsensus
Input:Input: 1 or 0 to each processor1 or 0 to each processor
Output:Output: Agreement:Agreement: all procssors decide 0 or 1 all procssors decide 0 or 1 Termination:Termination: all processors eventually all processors eventually
decidedecide Validity:Validity: if all inputs x , then decide x if all inputs x , then decide x
3
The result: No completely asynchronous No completely asynchronous
consensus protocol can tolerate consensus protocol can tolerate even a single unannounced even a single unannounced process death.process death.

4
This problem serves a role that is similar This problem serves a role that is similar to the one served by “the halting to the one served by “the halting problem” in computability theory.problem” in computability theory.
Many problems equivalent to consensus Many problems equivalent to consensus (or reduce to it)(or reduce to it)

5
How commit protocols in practice dealHow commit protocols in practice dealwith this outcome ?with this outcome ?Weaken an assumption. For example: Weaken an assumption. For example: Computation model: e.g., assume Computation model: e.g., assume
bounded –delay networkbounded –delay network Fault model: e.g., assume faults only at Fault model: e.g., assume faults only at
start.start.

6
The ModelThe Model
Message SystemMessage System Reliable Reliable
Delivers all messages correctlyDelivers all messages correctly Exactly onceExactly once
Processing Model Completely Asynchronous
No Assumptions about relative No Assumptions about relative speedsspeeds
Unbounded time in delivering Unbounded time in delivering messagemessage

Weak ConsensusWeak Consensus
Every process starts with initial value in {0,1} A nonfaulty process decides on a value in {0,1}
by entering an appropriate decision state All nonfaulty process are required to choose
the same value
Both 0 and 1 are possible decision values, although perhaps for different initial configurations.
(Trivial solutions – e.g., “0” - are ruled out) 7

8
System ModelSystem Model
Communicate by means of one global message buffer
Atomic step Attempt to receive a message Perform local computation Send arbitrary but finite set of
messages

Consensus Protocol
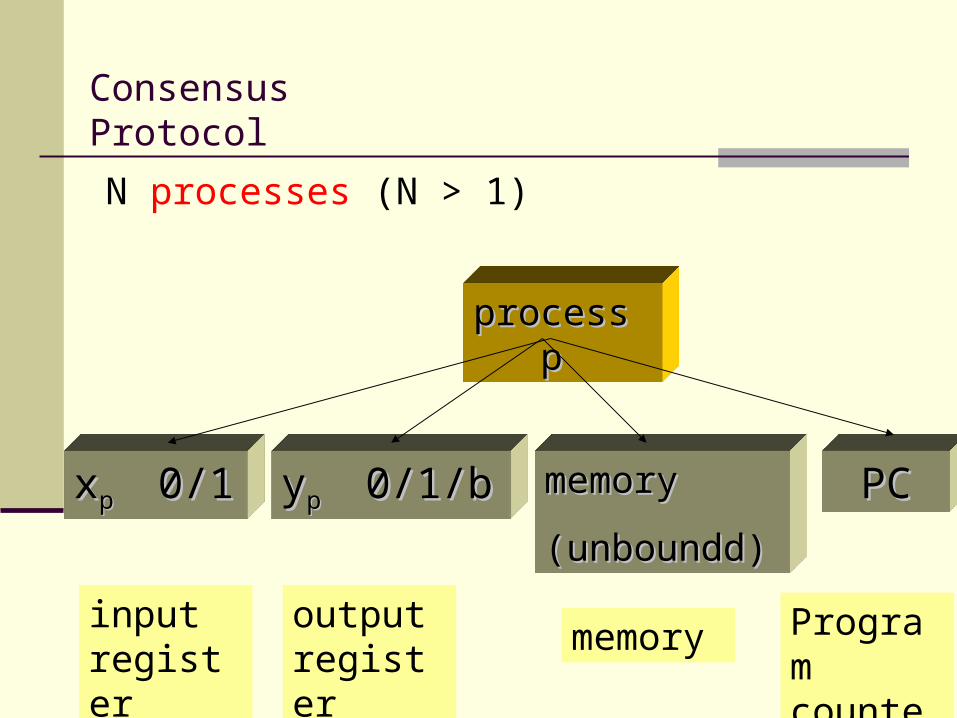
N processes (N > 1) Each process has
xp – one-bit input register yp – output register with values in
{b,0,1} Unbounded amount of internal
storage PC – Program counter
9
10
Consensus Protocol
N processes (N > 1)
process process p p
xxp p 0/10/1 yyp p 0/1/b0/1/b memorymemory
(unboundd)(unboundd)
PCPC
input register
output register
memory
Program counter

11
Fixed starting valued at the memory (except the input register)
Output register starts with b The output register is “write once” when a value is written to the output
register, the process is “in a decision state”.
Process acts deterministically according to a Transition function

12
Communication System
A message is a pair (p,m) p is the name of the destination m is a “message value”
message buffer Maintains messages that have been sent but
not yet delivered
We assume a clique topology

13
two operations by a process : send (p,m) – place (p,m) in the message buffer
( “message (p,m) is sent to process p”)
receive (p)delete a message (p,m) from the message buffer and returns m ( “message (p,m) is received”)OR
returns (message buffer unchanged)

14
Message system nondeterministic.However, each message (p,m) in the
message buffer: if receive(p) is performed times, then (p,m) is eventually delivered.
In other words: in response to receive(p) : if a message
(p,m) is in the message buffer, then the message system can return , but only a finite number of times .

15
(P(P11,M) ,M)
Message BufferMessage Buffer
(P(P00,M’,M’) )
(P(P22,M’’,M’’) )
(P(P11,M’’’,M’’’) )
Process 0Process 0 Process 2Process 2Process 1Process 1
receive(0)receive(0) (P(P00,M’,M’) )

16
(P(P11,M) ,M)
Message BufferMessage Buffer
Process 0Process 0 Process 2Process 2Process 1Process 1
receive(1)receive(1)
(P(P22,M’’,M’’) )
(P(P11,M’’’,M’’’))
(P(P11,M’’’) ,M’’’) send(2,msend(2,m
))
(P(P22,m) ,m)

17
Configurations
A configurations consists of Internal state of each process Contents of the message buffer
initial configuration each process p starts with xp=0 or xp=1 the message buffer is empty

step – consists of a primitive step by a single process p. phase 1 – receive(p) is performed phase 2 – p enters a new internal
state and sends a finite set of messages
A step is completely determined by the pair e = (p,m), called an event.
18

19
event e = (p,m) (“receipt of m by p”). step of a single process p:
receive(p) is performed ( p receives m) p enters a new internal state p sends a finite set of messages
event and step:
event: syntax
step: semantic

20
Events and Schedules
e(C) – denotes the resulting configuration
(“e can be applied to C”) The event (p,) can always be applied A schedule from C is a finite/infinite
sequence of events that can be applied from C.
The associated sequence of steps is called a run.one: event - step
many: schedule - run

21
If a schedule is finite, (C) denotes the resulting configuration C’, which is “reachable from C “.
C’ is accessible if it is reachable from an initial configuration.

22
Lemma 1 (‘commutativity’)
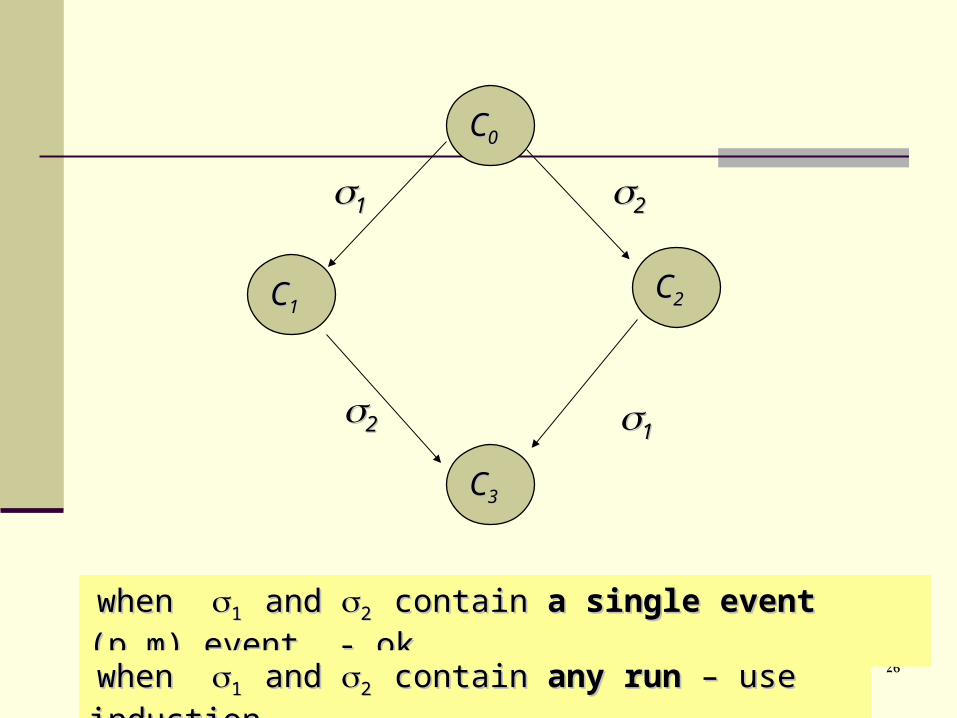
Lemma 1 : Suppose that from some configuration C, the schedules 1,2 lead to configurations C1,C2 , respectively.
If the sets of processes taking steps in 1 and 2 , respectively, are disjoint, then 2
can be applied to C1 , and 1 can be applied to C2 , and both lead to the same
configuration C3 .

23
CC22
CC00
CC11
CC33
11
11
22
22
when when 1 1 and and 2 2 contain contain a single eventa single event (p,m) (p,m) eventevent

24
(P(P11,M,M11) ) (P(P22,M,M22) )
(P(P22,M,M22) ) (P(P11,M,M11) )
1122
1122
The The message message buffer of buffer of
CC33
The The message message buffer of buffer of
CC11
The The message message buffer of buffer of
CC22
The The message message buffer of buffer of
CC00
Message buffer

25
PP11Internal Internal state - state - AA
PP22Internal Internal state - state - XX
PP11Internal Internal state - state - BB
PP22Internal Internal state - state - YY
PP11Internal Internal state - state - BB
PP22Internal Internal state - state - XX
PP11Internal Internal state - state - AA
PP22Internal Internal state - state - YY
11 22
1122
All other processors – change unchanged
states
26
CC22
CC00
CC11
CC33
11
11
22
22
when when 1 1 and and 2 2 contain contain a single eventa single event (p,m) (p,m) event - okevent - ok when when 1 1 and and 2 2 contain contain any runany run – use – use inductioninduction

27
A configuration A configuration CC has a has a decision valuedecision value vv
if some process if some process pp is in a decision state is in a decision state with with yyp p = v= v ( (v =0 v =0 oror v=1 v=1). ).
A consensus protocol is A consensus protocol is partially correctpartially correct if it if it satisfies two conditions:satisfies two conditions:
1. No accessible configuration has more 1. No accessible configuration has more than one decision value.than one decision value.
2. For each 2. For each v v {0,1}, {0,1}, some accessible some accessible configuration has decision value configuration has decision value v v ..
good news
- it is non trivial
- sometimes it decides
- it never decides incorrectly
bad news
- termination not guaranteed
- what about delivering all messages?
-what about failures?

28
A process A process p p is is nonfaultynonfaulty in a run if it in a run if it takes takes steps. It is steps. It is faulty faulty otherwise.otherwise.
bad news: a process can be declared faulty only at
!! A run is A run is admissibleadmissible if if
- at most one process is faulty, and - at most one process is faulty, and
- all messages sent to non-faulty- all messages sent to non-faulty
processes are eventually received.processes are eventually received.

29
A run is A run is decidingdeciding if some process reaches if some process reaches a decision state.a decision state.
A consensus protocol is A consensus protocol is totally correcttotally correct in in spite of one faultspite of one fault if it is:if it is: partially correct, andpartially correct, and every admissible run is a deciding run.every admissible run is a deciding run.

30
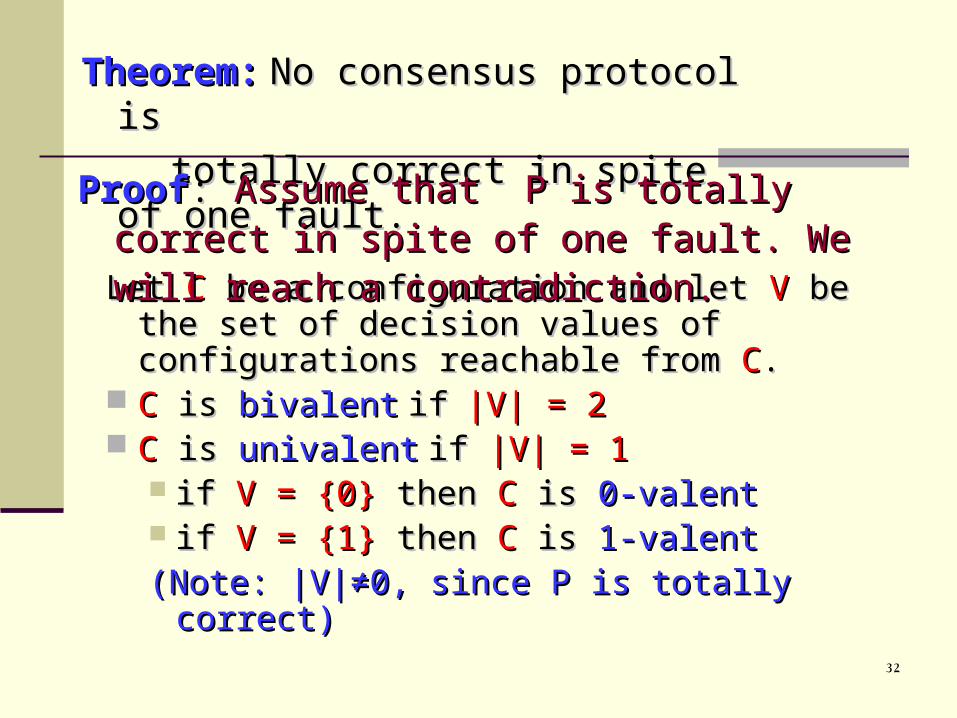
Theorem:Theorem:
No consensus protocol is totally No consensus protocol is totally correct in spite of one fault.correct in spite of one fault.

31
Sketch of ProofSketch of Proof:: Assume that P is totally Assume that P is totally correct in spite of one fault. correct in spite of one fault.
show an initial configuration from which show an initial configuration from which each decision is still possibleeach decision is still possible ( ( Lemma 2 Lemma 2 ))
show that from such a configuration one can show that from such a configuration one can always reach another similar configuration always reach another similar configuration
( ( Lemma 3 Lemma 3 ) ) conclude – by induction – with an admissible conclude – by induction – with an admissible
run that never decides – a contradiction.run that never decides – a contradiction.
32
Let Let CC be a configuration and let be a configuration and let VV be the be the set of decision values of configurations set of decision values of configurations reachable from reachable from CC..
CC is is bivalentbivalent ifif |V| = 2|V| = 2 CC is is univalentunivalent if if |V| = 1|V| = 1
if if V = {0}V = {0} then then CC is is 0-valent0-valent if if V = {1}V = {1} then then CC is is 1-valent1-valent(Note: |V|≠0, since P is totally correct)(Note: |V|≠0, since P is totally correct)
Theorem:Theorem: No consensus protocol is No consensus protocol is
totally correct in spite of one totally correct in spite of one fault.fault.ProofProof: : Assume that P is totally correct in Assume that P is totally correct in spite of one fault. We will reach a spite of one fault. We will reach a contradiction.contradiction.

33
0-valent configuration0-valent configuration
From now on:
1-valent configuration1-valent configuration
2-valent configuration2-valent configuration
UnknownUnknown

34
Proof:Proof:
Assume there is no bivalent initial configuration.Assume there is no bivalent initial configuration.
But P is partially correct.But P is partially correct.
So, there are both 0-valent and 1-valent So, there are both 0-valent and 1-valent
initial configurations.initial configurations.
Lemma 2Lemma 2: : PP has a bivalent initial has a bivalent initial configuration.configuration.

35
. .
. .
. .
. .
. .
. .
bivalentbivalent
configurationconfigurationinitial configurationsinitial configurationsCC

36
CC00
. .
. .
. .
. .
. .
. .
0-valent0-valentconfigurationconfiguration CC11
initial configurationsinitial configurations
1-valent1-valentconfigurationconfiguration

37
Two initial configurations are called Two initial configurations are called adjacentadjacent if they differ only in the initial if they differ only in the initial value of a single processvalue of a single process..
00 11 00 11 11
00 11 00 11 00
x0 x1 x2 x3 x4

38
Claim:Claim: There exist a 0-valent initial
configuration C0 adjacents to a 1-valent
initial configuration C1.
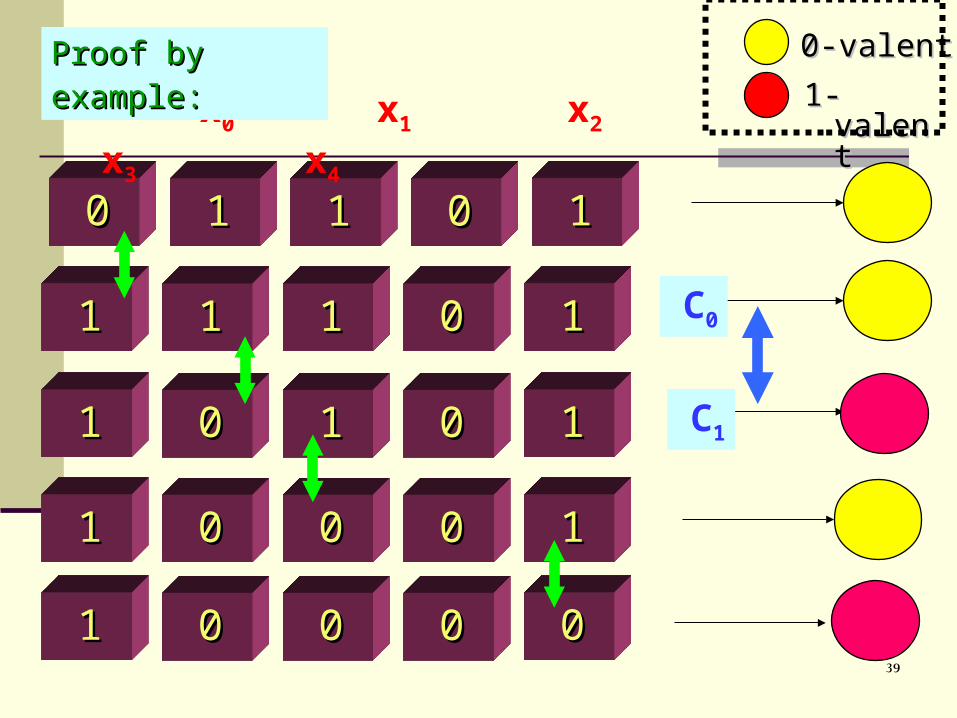
39
00 11 00 11 11
11 11 00 11 11
11 11 00 11 00
11 11 00 00 00
11 00 00 00 00
x0 x1 x2 x3 x4
C0
C1
Proof by Proof by example:example:
0-valent0-valent
1-valent1-valent

40
So: So: There exist a 0-valent initial
configuration C0 adjacents to a 1-valent
initial configuration C1.
Let pp be the process in whose initial value they differ

41
PP is a consensus protocol that is totally is a consensus protocol that is totally correct in spite of one fault.correct in spite of one fault.
Consider an admissible deciding run (with Consider an admissible deciding run (with schedule schedule ) from ) from CC00 in which process in which process pp takes no steps.takes no steps.
can be applied to can be applied to CC11
The two corresponding configurations are The two corresponding configurations are identical, except for the internal state in identical, except for the internal state in pp
Both runs reach the sameBoth runs reach the same decision decision xx

42
x = 1 C0 is bivalent
x = 0 C1 is bivalent
Contradiction.
CC11CC00
C’C’
C’’C’’
Decision: x x
0-valent0-valent
1-valent1-valent
Lemma 2Lemma 2: : PP has a bivalent initial has a bivalent initial configuration.configuration.
So , we proved:

43
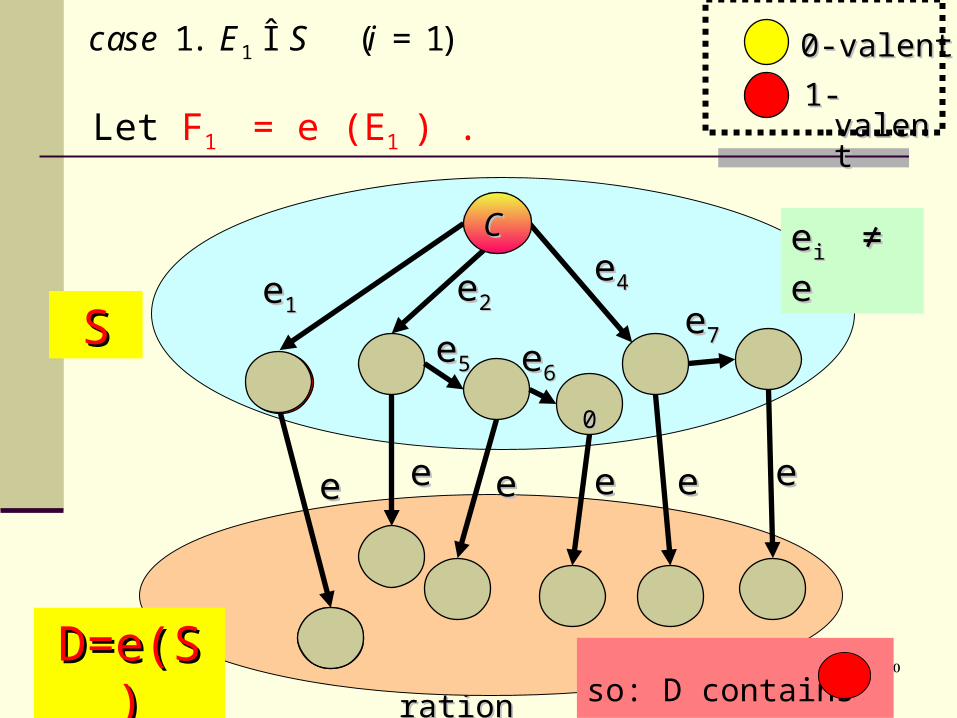
Lemma Lemma 3:3:Let:Let:
CC be a be a bivalentbivalent configuration of P, configuration of P,
e = (p,m)e = (p,m) be an event that is applicable to be an event that is applicable to CC. .
SS be the set of configurations reachable from be the set of configurations reachable from
CC without applying without applying ee, and , and
D D = = e(S)e(S) = { = {e(E)e(E)| | EESS and and ee is applicable to is applicable to EE}.}.
Then, Then, DD contains a contains a bivalentbivalent configuration. configuration.

44
Note:e =(p,m) is applicable to Cso: message (p,m) is in the message
buffer,so: e is applicable to every ES.

45
EE
ee22ee11ee44
eei i ≠ ≠ ee
bivalent bivalent configurationconfiguration
eeeeee ee
SS
ee
D=e(D=e(S)S)
ee
ee55 ee66ee77
CC
Need to prove: Need to prove: DD contains a contains a bivalentbivalent configuration configuration

46
Prove by contradictionAssume that D contains no
D=e(S)D=e(S)
eei i ≠ ≠ ee
ee eeee ee
SS
eeee
CC 0-valent0-valent
1-valent1-valent

47
Step 1:
Claim: D contains both and
0-valent0-valent
1-valent1-valent
So: every configuration d D is or
The proof has three steps.

48
SSee
D=e(SD=e(S))
DD00 DD11
ee
e=(p,m)
Step 1

49
1.
2. i
i
case E S
case E S
Î
Ï
C is bivalent There exist Ei, , i=0,1, i-valent
configurations reachable from C.
eei i ≠ ≠ ee
ee eeee ee
SS
ee
D=e(S)D=e(S)ee
CC
50
Let F1 = e (E1 ) .
1 1. ( 1)case E S iÎ =
EE1100
ee22ee11ee44
eei i ≠ e ≠ e
bivalent bivalent configuraticonfigurati
ononFF11
ee eeee ee
SS
ee
D=e(SD=e(S))
ee
ee55 ee66
ee77
CC
0-valent0-valent
1-valent1-valent
so: D contains

51
e was applied in reaching E0
so, either E0 is in D, or there exists
F0 D from which E0 is reachable.
0 2. ( 0)case E S iÏ =
ee22ee11ee44
eei i ≠ e ≠ e
bivalent bivalent configuraticonfigurati
onon
ee eeee ee
SS
ee
D=e(SD=e(S))
ee
ee55 ee66
ee77
FF00
EE00
CC
0-valent0-valent
1-valent1-valent
so: D contains

52
So: Fi is i-valent (not bivalent) One of Ei and Fi is reachable from the
other.
both and
So, we know that D contains
0-valent0-valent
1-valent1-valent
End of step 1Start of step 2

53
Step 2Claim: There exist C0 , C1 S such that:
C0 and C1 are neighbors
( C1 = e’(C0 ), e’=(p’,m’) )
D0 = e(C0) is
D1 = e(C1) is
(two configurations neighbors if one results from the other in a single step.)
0-valent0-valent
1-valent1-valent

54
SSee
D=e(SD=e(S))
DD00 DD11
e’CC11CC00
ee
e=(p,m)
e’=(p’,m’)
Step 2

55
e(C) is or . Suppose it is .
There are and in D.
They have predecessors in S.
e(C)e(C)
SS
D=e(SD=e(S))
e(C)e(C)
CC
ee
ee ee
0-valent0-valent
1-valent1-valent

56
Consider the path in S from C to
the predecessor of
e(C)e(C)
SS
ee
D=e(SD=e(S))
ee
e(C)e(C)
CC
ee
0-valent0-valent
1-valent1-valent

57
Applying e to each configuration on this path, we get a configuration in D, which is or .
bivalent bivalent configuraticonfigurati
onon
SS
ee
D=e(SD=e(S))
ee
e(C)e(C)
eeeeee
CC
ee

58
So we get two configurations C0 and C1 , that
are neighbors in S; i.e., there is e’ s.t.
SSee
D=e(SD=e(S))
e(C)e(C)DD00 DD11
e’CC11
CC00CC
ee
0 1
e'C C

59
So, we proved the claim:
There exist C0 , C1 S such that:
C0 and C1 are neighbors
( C1 = e’(C0 ), e’=(p’,m’) )
D0 = e(C0) is
D1 = e(C1) is
hw: complete the proof when e( C) is
End of step 2 Start of step 3

60
D1 = e’(D0) by Lemma 1Case 1 : Case 1 : p’ ≠
pcontradiction
SSee
D=e(SD=e(S))
e(C)e(C)DD00 DD11
e’CC11
CC00CC
ee
e’
Step 3: get to a contradiction
Recall: e=(p,m)

61
SSee
D=e(SD=e(S))
DD00 DD11
e’CC11CC00
ee
e=(p,m)
e’=(p’,m’)
p’ p
Case 2 : Case 2 : p’ = p
recall:

62
CC11
CC00
DD00DD11
AA
Case 2 : Case 2 : p’ = p
e
- - deciding deciding run from Crun from C00 in which p in which p takes no takes no stepssteps A = A = ((CC00))
deciding rundeciding run
1-valent1-valent
0-valent0-valent
e
e’
e’
e e
EE00
EE11A is a deciding run. But it cannot be
and it cannot be . a contradiction !!!

63
Lemma Lemma 3:3:Let:Let:
CC be a be a bivalentbivalent configuration of P, configuration of P,
e = (p,m)e = (p,m) be an event that is applicable to be an event that is applicable to CC. .
SS be the set of configurations reachable from be the set of configurations reachable from
CC without applying without applying ee, and , and
D D = = e(S)e(S) = { = {e(E)e(E)| | EESS and and ee is applicable to is applicable to EE}.}.
Then, Then, DD contains a contains a bivalentbivalent configuration. configuration.
Lemma 2Lemma 2: : PP has a bivalent initial has a bivalent initial configuration.configuration.
So, we proved:

64
Any deciding run from a bivalent initial configuration goes to univalent configuration, so there must be some single step that goes from a bivalent to univalent configuration.We construct a run that avoids such a step:
bivalent configuration
bivalent configuration
deciding run
bivalent configuration
…
univalent configuration
end of proof:

65
we construct an infinite non-deciding run
bivalent configuration
bivalent configuration
non-deciding run
bivalent configuration
……

66
Start with a bivalent initial configuration( Lemma 2)
The run constructed in stages. Every stage starts with a bivalent configuration and ends with a bivalent configuration
A queue of processes, initially in arbitrary order
Message buffer is ordered according to the time messages were sent

67
In each stage:
C is a bivalent configuration that the stage starts with.
Suppose that process p heads the queue
Suppose that m is the earliest message to p in the message buffer if any (or otherwise)
e = (p,m)

68
By Lemma 3 there is a bivalent configuration C’ reachable from C by a schedule in which e is the last event.
After applying this schedule: move p to the back of the queue

69
in any infinite sequence of stages every process takes infinitely many steps
every process receives every message sent to it
Therefore, the constructed run is admissible
never reaches a univalent configuration The protocol never reaches a decision The protocol is not totally correct in
spite of one fault.contradiction

70
Conclusion
Theorem:
No consensus protocol is totally correct in spite of one fault.
hw: which process fails in the infinite run that was constructed for the proof?

71
One importance lesson:In an asynchronous system, there is no
way to distinguish between a faulty process and a slow process.
Other tasks not solvable with one faulty processor:
Input graph – connectedOutput graph - disconnected
Many extensions and uses

72
References
• J. Pachl, E. Korach and D. Rotem, Lower bounds for distributed maximum-finding algorithm. JACM, 1984.
• E. Chang and R. Roberts, An improved algorithm for decentralized extrema-finding in circular configurations of processes, CACM, 1979.
• M. Fischer, N. Lynch, M. Paterson, Impossibility of distributed consensus with one faulty processor, JACM, 1985.


















