
Distance d'aspiration max. des pièces :10content2.smcetech.com/pdf/XT661_FR.pdf · Dans le...
20
0 Amplitude [mm] Temps [s] 0.5 1 1.5 2 2.5 Vibration (Pression d’alimentation : 0.1 MPa) ±0.01 mm max. 0.5 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 Modèle cyclone à profil étroit Modèle cyclone 0 Taille [mm] Force de préhension [N] 50 40 30 20 10 0 20 40 60 80 100 Force de préhension (Pression d’alimentation : 0.4 MPa) ¡ Amplitude de la pièces lors de la préhension : ±0.01 mm ∗ max. ∗ Cellule en silicone à batterie solaire (125 mm, Epaisseur= 250 μm) ∗ Dans les conditions SMC (Comment calculer : Page 3) ¡Force de préhension importante : Max. 44 N ∗ ∗ Diamètre du corps extérieur : ø100 Modèle cyclonique à profil étroit ¡6 tailles disponibles : ø40/ø60/ø80/ø100/ 120/150 ¡5 tailles disponibles : ø20/ø40/ø60/ø80/ø100 2 tailles disponibles : ø20, ø25 Modèle Bernoulli Modèle cyclonique 10 mm Étant donné qu'il existe une couche d'air entre la pièce et le dispositif de préhension, l'aspiration sans contact est possible. Couche d'air Pièce ¡Deux modèles sont disponibles. ¡Aide au transfert des pièces sans contact. ¡Distance d'aspiration max. des pièces :10 mm ∗ ∗ Reportez-vous à la partie « Force-Distance de préhension des pièces » aux pages 11 à 13. Dispositif de préhension sans contact Pièce (Cellule en silicone à batterie solaire) Amplitude Préhension importante Réduction des vibrations 1.8 mm INFORMATIONS 12-EU605-FR Série XT661 Dispositif de préhension sans contact
Transcript of Distance d'aspiration max. des pièces :10content2.smcetech.com/pdf/XT661_FR.pdf · Dans le...

0
Am
plitu
de [m
m]
Temps [s]
0.5 1 1.5 2 2.5
Vibration (Pression d’alimentation : 0.1 MPa)
±0.01 mm max.
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
Modèle cyclone à profil étroit
Modèle cyclone
0
Taille [mm]
For
ce d
e pr
éhen
sion
[N]
50
40
30
20
10
020 40 60 80 100
Force de préhension (Pression d’alimentation : 0.4 MPa)
¡Amplitude de la pièces lors de la préhension : ±0.01 mm∗max.∗ Cellule en silicone à batterie solaire(�125 mm, Epaisseur= 250 μm)
∗ Dans les conditions SMC(Comment calculer : Page 3)
¡Force de préhension importante : Max. 44 N∗∗ Diamètre du corps extérieur : ø100
Modèle cyclonique à profi l étroit
¡6 tailles disponibles : ø40/ø60/ø80/ø100/�120/�150
¡5 tailles disponibles : ø20/ø40/ø60/ø80/ø100
2 tailles disponibles : ø20, ø25
� Modèle Bernoulli� Modèle cyclonique
10 mm
Étant donné qu'il existe une couche d'air entre la pièce et le dispositif de préhension, l'aspiration sans contact est possible.
Couche d'air
Pièce
¡Deux modèles sont disponibles.
¡Aide au transfert des pièces sans contact.
¡Distance d'aspiration max. des pièces :10 mm∗∗ Reportez-vous à la partie « Force-Distance de préhension des pièces » aux pages 11 à 13.
Dispositif de préhension sans contact
Pièce(Cellule en silicone à batterie solaire)Amplitude
Préhension importante Réduction des vibrations
1.8 mm
INFORMATIONS
12-EU605-FR
Série XT661
Dispositif de préhension sans contact

0
0
Dis
pers
ion
de la
pre
ssio
n da
ns le
sen
s de
la h
aute
ur
Dispersion de la pression dans le sens du diamètre
Méthode cyclone établie par SMC
Dispositif de préhensionsans contact
Grande surface de vide avec une pression uniforme
Petite zone de vide, vide plus important dans la partie centrale
Orifice d’alimentation
Pièce
Diamètre du corps extérieur [mm] ø20 ø40 ø60 ø80 ø100Consommation d'air [L/min (ANR)] 77 148 148 148 258
Force de préhension [N] 4.3 14 21 26 44
Pression d'alimentation : 0.4 MPa
� Modèle cyclonique
Grâce à sa conception rainurée un effet cyclonique est généré.Une large zone d'aspiration est disponible
¡Diverses méthodes d'aspiration de pièce disponibles.
¡Sans graisse ¡L'intérieur peut être démonté et nettoyé
¡Exécutions spéciales
Avec ventouse en uréthane∗ (-X207)¡Atténuation des impacts et prévention
des ommages pendant la préhension¡Pas besoin d'installer un guide∗ Sauf ø20
Avec plusieurs orifi ces (-X211)La présence d'une pièce peut être vérifi ée en installant un capteur.
Ventouse en uréthane
Capteur de pressionSérie PSE540
Capteur de débit Série PFMV
Pour la méthode de sélection et d'utilisation d'un capteur, reportez-vous au mode d'emploi
Buse
Pièces perméables, etc. Planche à trous traversants, etc. Pièce dans un paquet
Capteur recommandé
Épai
sseu
r de
la p
ièce
[μm
]
300
L'air est évacué dans le sens du tourbillon.Principe de fonctionne-
ment
Voir page 8.
L'air de l'orifi ce d'alimentation est souffl é hors de la buse du côté concave de la surface d'aspiration, ce qui crée un fl ux d'air tourbillonnant. Le fl ux d'air tourbillonnant est évacué dans l'atmosphère par l'espace entre le dispositif de préhension sans contact et la pièce.Par conséquent, une zone de vide est créée à l'intérieur du fl ux en spirale en raison de l'effet de cyclone, ce qui permet de lever la pièce sans contact physique. L'action de la force centrifuge du flux en spirale permet de générer une plus grande force de préhension.
¡Modèle cyclone
Orifi ce d’alimentation en air
Plusieurs orifi ces
Matière du corps : AlConsommation d’air réduitePréhension importante
1
Série XT661

Diamètre du corps extérieur [mm] ø20 ø25Consommation d'air [L/min (ANR)] 31 31
Force de préhension [N] 1.4 2
Pression d'alimentation : 0.4 MPa
� Modèle cyclonique à profi l étroit (-X260)
¡Montage
¡Peut être monté sur l'extrémité d'un bras de robot.¡Deux tailles (ø20 et ø25) sont disponibles.
Appliquez un adhésif sur la surface du côté de l'orifice d'alimentation en air du dispositif de préhension sans contact, et montez-le sur l'équipement.(Veillez à ce que l'adhésif ne gêne pas l'orifi ce d'alimentation en air.)
Épaisseur : 1.8 mm
Masse : environ 1.3 g∗∗ Diamètre du corps extérieur : ø20
eux tailles (ø20 et ø25) sont disponibles.) sont disponibles.
Exécutions spécialesProfi l étroit
Dispositif de préhension sans contact
Bras de robot
Pièce (plaquette, etc.)
2
Dispositif de préhension sans contact Série XT661

0
Temps [s]
Am
plitu
de [m
m]
0.5 1 1.5 2 2.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.50
Temps [s]
Am
plitu
de [m
m]
0.5 1 1.5 2 2.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
Orifice d’alimentation
Pièce
L'air est évacué radialement.
Diamètre du corps extérieur [mm] ø40 ø60 ø80 ø100 �120 �150Consommation d'air
[L/min (ANR)]98 98 98 156 291 291
Force de préhension [N] 2.2 4.1 5.1 7.8 17 14
Pression d'alimentation : 0.4 MPa
� Modèle BernoulliLa conception rainurée permet un effet Bernoulli avec
suppression de l'amplitude de la pièce à usiner lors de la préhension !
¡Réduction de la charge de rotation ∗ Pas de directivité de l'air tourbillonnant
¡Normalisation des orifi ces multiples∗ ∗ Sauf ø40
¡Sans graisse
¡L'intérieur peut être démonté et nettoyé
¡Amplitude réduite de la pièce
Taille : ø100 Comment calculerTaille : �120
¡Diverses méthodes d'aspiration de pièce disponibles.
L'air de l'orifi ce d'alimentation est souffl é radialement à partir de la buse sur le côté convexe de la surface d'aspiration.Le flux radial est évacué dans l'atmosphère par l'espace entre le dispositif de préhension sans contact et la pièce, et l'air entre le dispositif de préhension sans contact et la pièce est tiré dans le sens périphérique. Par conséquent, une zone de vide est générée au centre, ce qui permet de lever la pièce sans contact physique.De plus, la conception à liteau de rainure originale permet à l'air d'être évacué radialement, ce qui supprime les ondulations provoquées par les impulsions et le fl ux d'air tourbillonnant, et permet de réduire l'amplitude de la pièce au minimum.
¡Modèle Bernoulli
Feuille isolante, etc.Matières de l'électrode, etc.
Cellule à batterie solaire, etc.
Épais
seur
de la
pièc
e[μ
m]
300
0
Aiguille de déplacement laser
Dispositif de préhension sans contact
GuideDéplacement
Pièce(Cellule en silicone à batterie solaire)
<Conditions> Cellule en silicone à batterie solaire
�Épaisseur 125 mm : 250 μmPression d'alimentation : 0.1 MPa
Amplitude
Matière du corps : RésineModèle avec réduction des vibrations
Principe de fonctionne-
ment
3
Série XT661

Régulateur de précision pour salle blanche
Production pour salle blancheLavage des piècesDouble emballage/expédition
Filtre micronique Régulateur
Régulateur
Electrodistributeur 2/2
Electrodistributeur 2/2
Filtre pour salle blanche
Electrodistributeur 2/2
Module d'air propre
Sécheur d’air à membrane
Super fi ltre micronique Filtre anti-odeur
AM(Degré de fi ltration : 0.3 μm)
ARARM10
AR-X2400 (Sans lubrifi ant)ARM10 (Sans lubrifi ant)
SRH LVASFDSF
LLB Modularise l'interrupteur de débit, le régulateur, le pressostat, le distributeur 2 voies et le fi ltre.
(Degré de fi ltration : 0.01 μm)
AME(Degré de fi ltration : 0.01 μm)
AMF(Degré de fi ltration : 0.01 μm)
IDG
Utilisation générale
Air
Sans lubrifi ant
Air
Salle blanche
Air
VXZ (Autre option/Sans lubrifi ant)VQ2-X2 (Sans lubrifi ant)
VXZVQ20
Pour plus de détails,consultez le site SMC.
http://www.smcworld.com
Autres produits
4
Dispositif de préhension sans contact Série XT661

[Modèle cyclone ø60)
0 1 2 3 4 5 6 7 8 9 10
Distance à partir de la pièce [mm]F
orce
de
préh
ensi
on [N
]
30
25
20
15
10
5
0
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
Procédure de sélection
1) Vérifi ez le type de pièce ainsi que sa taille et son poids.2) Vérifi ez le guide correspondant à la méthode de transfert de la pièce et la « Sélection » (page 7). En même temps, vérifi ez la distance entre la pièce à défi nir et le dispositif de préhension sans contact.3) Vérifi ez la pression d'alimentation appliquée au dispositif de préhension sans contact.
1) Clarifiez la force de préhension correspondant à la distance entre la pièce et le dispositif de préhension sans contact pour chaque pression d'alimentation.
<Comprendre le graphique>Exemple : Dans le cas du « Modèle cyclone ø60 », une pression d'alimentation de
0.2 Mpa, une masse de pièce de 50 g (0.49 N), et une distance de 1 mm entre la pièce et le dispositif de préhension sans contact.
<Procédure de vérifi cation>Dans le graphique du « Modèle cyclone ø60 », vérifi ez la force de préhension de l'intersection d'une distance de 1 mm entre la pièce et le dispositif de préhension sans contact et une pression d'alimentation de 0.2 Mpa. Ensuite, tirez une ligne horizontale de ce point à l'axe vertical pour obtenir la force de préhension.
2) Multipliez la force de préhension fi nale par un facteur de sécurité et déterminez la force de préhension temporaire. Obtenez la force de préhension temporaire à l'aide de l'équation suivante. (Note: La force de préhension temporaire correspond à la force de préhension qui a été défi nie en tenant compte du facteur de sécurité utilisé pour sélectionner un dispositif de préhension sans contact.)
F = f x (1/t) F: Force de préhension temporaire [N] f : Force de préhension [N] t : Facteur de sécurité … 2 min.
3) Comparez la force de préhension fi nale et la masse de la pièce, et déterminez la taille et le nombre de dispositifs de préhension sans contact pour que force de préhension temporaire ≥ masse de la pièce .
<Procédure de vérifi cation>Si la force de préhension temporaire ≥ la masse de la pièce, le dispositif de préhension peut être utilisé dans ces conditions.si la force de préhension temporaire < la masse de la pièce, augmentez la taille du dispositif de préhension sans contact, ou le nombre de dispositifs de préhension à utiliser.Obtenez le nombre requis de dispositifs de préhension à l'aide de l'équation suivante.
N = (9.8 x W/1000)/(F) … Arrondi au nombre entier supérieur le plus proche N: Qté [pcs.] W : Masse de la pièce [g] F : Force de préhension temporaire [N] 9.8 : Attraction gravitationnelle [m/s2]
<Procédure de vérifi cation> Déterminez les positions des dispositifs de préhension sans contact en fonction du nombre de dispositifs à utiliser, en tenant compte de l'équilibre de la pièce.
Si l'équilibre de la pièce est mauvais lors de la préhension, augmentez la taille du dispositif de préhension sans contact ou le nombre de dispositifs de préhension à utiliser.
∗ Vous trouverez ci-dessus les procédures de sélection des dispositifs de préhension sans contact générales ; elles ne conviendront pas à tous les dispositifs.Les clients sont tenus d'effectuer un test sur leur dispositif et de sélectionner la taille des dispositifs de préhension sans contact et les dispositifs à utiliser selon les résultats des tests.
Vérifi ez la pièce et les conditions d'utilisation.1
Vérifi ez la force de préhension.2
Déterminez la disposition des dispositifs de préhension sans contact.3
5
Série XT661Sélection du modèle

Exemples de sélection de dispositif de préhension sans contact
Exemple de sélection 1 Pour petite pièce Exemple de sélection 2 Pour grosse pièce
¡Taille de la pièce : �100 x épaisseur de la plaque 3 mm¡Masse de la pièce : 300 g¡Distance de la pièce : 1 mm¡Pression d'alimentation : 0.2 MPa
¡Taille de la pièce : 2200 x 2500 x 0.7 mm¡Masse de la pièce : 9.7 kg¡Distance de la pièce : 0.8 mm¡Pression d'alimentation : 0.3 MPa
(1) Vérifi ez la pièce et les conditions d'utilisation.1)Taille de la pièce : �100 x épaisseur de la plaque 3 mm
Masse de la pièce : 300 g
2)Guide : Sur le dessus de la pièce au moyen d'une butée externeDistance de la pièce : 1 mm
3)Pression d’alimentation : 0.2 MPa
(2) Vérifi ez la force de préhension.1) Dans le graphique (force-distance de préhension de la pièce),
vérifi ez la force de préhension à une pression d'alimentation de 0.2 Mpa et une distance de 1 mm entre la pièce et le dispositif de préhension sans contact pour chaque taille.
XT661-2A : 0.8 N XT661-4A : 3.8 N XT661-6A : 5.9 NXT661-8A : 7.5 N XT661-10A : 14.4 N
2) Calculez la force de préhension temporaire en utilisant un facteur de sécurité de 2.
XT661-2A : F = f x (1/t) = 0.8 x (1/2) = 0.4 NXT661-4A : F = f x (1/t) = 3.8 x (1/2) = 1.9 NXT661-6A : F = f x (1/t) = 5.9 x (1/2) = 2.95 NXT661-8A : F = f x (1/t) = 7.5 x (1/2) = 3.75 NXT661-10A : F = f x (1/t) = 14.4 x (1/2) = 7.2 N
3) Confi rmez la relation « force de préhension temporaire ≥ masse de la pièce ».Convertissez la masse de la pièce [g] en force [N].
300 g → 300 x 9.8/1000 = 2.94 NPour une masse de pièce de 300 g (2.94 N)
XT661-6A : Force de préhension temporaire 2.95 N ≥ Masse de la pièce 300 g (2.94 N)
XT661-8A : Force de préhension temporaire 3.75 N ≥ Masse de la pièce 300 g (2.94 N)
XT661-10A : Force de préhension temporaire 7.2 N ≥ Masse de la pièce 300 g (2.94 N)
Dans ce cas, la relation « force de préhension temporaire ≥ masse de la pièce » est obtenue.Pour cette pièce, sélectionnez le modèle XT661-6A. Le nombre de dispositifs de préhension à utiliser est un.
(3) Déterminez la disposition des dispositifs de préhension sans contact.
1) Installez les dispositifs de préhension au centre de gravité (centre) de la pièce et vérifi ez qu'il n'y a pas de problème avec l'équilibre de la pièce pendant la préhension.
(1) Vérifi ez la pièce et les conditions d'utilisation.1) Taille de la pièce : 2200 x 2500 x 0.7 mm
Masse de la pièce : 9700 g
2) Guide : À la fi n de la pièceDistance de la pièce : 0.8 mm
3) Pression d’alimentation : 0.3 MPa
(2) Vérifi ez la force de préhension.1) Dans le graphique (force-distance de préhension de la pièce),
vérifi ez la force de préhension à une pression d'alimentation de 0.3 Mpa et une distance de 0.8 mm entre la pièce et le dispositif de préhension sans contact pour chaque taille.
XT661-10A : 22.4 N
2) Calculez la force de préhension temporaire en utilisant un facteur de sécurité de 2.
XT661-10A : F = f x (1/t) = 22.4 x (1/2) = 11.2 N
3) Confi rmez la relation « force de préhension temporaire ≥ masse de la pièce ».Convertissez la masse de la pièce [g] en force [N].
9700 g → 9700 x 9.8/1000 = 95.06 NXT661-10A : Force de préhension temporaire 11.2 N < Masse de la pièce 9700
g (95.06 N)
Dans ce cas, la relation « Force de préhension temporaire ≥ masse de la pièce » est obtenue, ainsi il est possible d'utiliser plusieurs dispositifs de préhension. Obtenez le nombre de dispositifs de préhension à utiliser à l'aide de l'équation suivante.
N = (9.8 x W/1000)/(F) = (9.8 x 9700/1000)/(11.2) = 9… Arrondi au nombre entier supérieur le plus proche
Pour cette pièce, sélectionnez le modèle XT661-10A.La nombre de dispositifs de préhension à utiliser est neuf.
(3) Déterminez la disposition des dispositifs de préhension sans contact.
1) Tenez suffisamment compte du centre de gravité et de la déviation de la pièce, puis installez neuf dispositifs de préhension sans contact pour une préhension bien équilibrée.(∗ En cas de déviation, la force de préhension diminuera.)
0.2 MPa0.3 MPa
Pièce
6
Dispositif de préhension sans contact Série XT661

Vis demontage
Adaptateur compatible· Diam. ext. du filetage : ø8 max.
Cotes sur plats : 8 max.
ImpactImpact
Pression de l'air
Accélération
Pression de l'air
Accélération
Couvercle de protectioncontre la pression de l'air
Il n'y a aucun force de retenuedans le sens horizontal.
Mouvementhorizontal
Mouvementhorizontal
Force de retenue dans le senshorizontal au moyen d'un guide
Zone dela pièce
Taille du dispositif depréhension sans contact
Zone dela pièce
Taille du dispositif depréhension sans contact
> <
Moment
Positions du dispositif de préhension sans contact et de la pièce
Positions du dispositif de préhensionsans contact et de la pièce
Positions des dispositifs de préhension sans contact et de la pièce
Positions des dispositifs de préhension sans contact et de la pièce
Sélection
Précautions à prendre pour chaque type de pièce
Autres précautions
Accélération/Pression de l'air/ImpactLors du transfert de la pièce, tenez compte non seulement la masse de la pièce, mais aussi de l'accélération, de la pression du vent et de l'impact. (voir fi g. 1) Faites particulièrement attention dans le cas où une plaque plane possède une grande surface. Il est nécessaire d'adopter des mesures telles que l'installation d'un couvercle de protection contre la pression du vent. Également, même si la relationforce de préhension temporaire ≥ masse de la pièce est adéquate, sélectionnez une taille plus grande qui offre un degré de marge. La stabilité du levage par rapport à l'accélération, la pression du vent et l'impact augmente généralement proportionnellement au diamètre.
Pièce avec des orifi cesSelon la taille et la répartition de l'orifi ce, il peut être impossible de lever la pièce. Afi n de garantir le levage de la pièce, la surface totale des trous par rapport à la zone d'aspiration (rapport d'ouverture) doit être de 1% max.. Cependant, la force de préhension est réduite, il est donc nécessaire d'utiliser une pression d'alimentation appropriée et un facteur de sécurité adéquat.
Pièce avec des surfaces concaves/convexesEn fonction de la taille des surfaces concaves/convexes, il peut être impossible de lever la pièce. Il est nécessaire d'utiliser une pression d'alimentation appropriée et un facteur de sécurité adéquat en fonction de la masse de la pièce.
En ce qui concerne le modèle XT661-2A, il existe une limite à la taille du raccord d'alimentation qui peut être utilisé. Utilisez un raccord dont le diam. ext. du fi letage est ø8 max. et dont les cotes sur plats sont de 8 max. En cas d'utilisation de tailles plus grandes que celles-ci, le montage peut gêner la tête de la vis de fi xation.
Pièce fi neSi la pression d'alimentation est supérieure à la valeur nécessaire, la pièce peut être déformée ou endommagée en raison de la force de préhension. La pièce peut également vibrer. Pour éviter cela, ne réglez pas la pression d'alimentation à une valeur plus élevée que nécessaire.
Pièce soupleComme les pièces souples sont faciles à déformer, la pièce a tendance à toucher le fond du dispositif de préhension sans contact. Sachez que la pièce peut toucher le dispositif de préhension avant toute utilisation.
Force horizontaleUn dispositif de préhension sans contact ne produit aucune force de retenue empêchant le déplacement horizontal de la pièce. Il est nécessaire d'installer un guide à l'extrémité de la pièce. (voir fi g. 2)
Taille du dispositif de préhension sans contact et de la pièceUtilisez un dispositif de préhension sans contact avec une surface inférieure à celle de la pièce. Si la surface du dispositif de préhension est supérieure à celle de la pièce, aucune zone de vide ne se crée, ainsi aucune force de préhension ne sera pas générée. (voir fi g. 3)
Équilibre de la pièceInstallez le dispositif de préhension sans contact à un endroit de façon à ce qu'un moment ne soit pas créé à partir de la pièce. (voir fi g. 4) En outre, lors du levage d'une plaque plane qui possède une grande surface avec plusieurs dispositifs de préhension sans contact, installez les dispositifs de préhension de façon à ce qu'ils soient bien équilibrés par rapport à la masse de la pièce. (voir fi g. 5)
Sens de montageLe sens de montage de base du dispositif de préhension est horizontal. Si le dispositif de préhension est monté obliquement ou verticalement, vous devez aussi installer un guide et utiliser un facteur de sécurité adéquat (2 min.).
Fig. 1
Fig. 2
Fig. 3
Fig. 4
Fig. 5
7
Série XT661
7

Lorsque vous utilisez un dispositif de préhension sans contact, installez également un guide.Fournissez un guide selon les applications et/ou la confi guration d'une pièce avec des références aux exemples d'installation suivants.
�Maintien d'une pièceUn dispositif de préhension sans contact ne produit aucune force de retenue empêchant le déplacement horizontal de la pièce.Installez un guide à l'extrémité de la pièce afi n de la maintenir.
�Éviter tout contact physiqueEn fonction des conditions d'utilisation, la pièce peut toucher le dispositif de préhension. Pour éviter un tel contact, installez un guide qui maintient une certaine distance entre le dispositif et la pièce.
�Sur le dessus de la pièce (à utiliser avec des ventouses.)
�Avec ventouse en uréthane�Sur le dessus de la pièce (butée externe)
�À l'extrémité de la pièce
En installant un guide à l'extrémité de la pièce, il est possible de maintenir la zone de contact aussi petite que possible.
Les vis de réglage permettent de régler la distance entre le dispositif de préhension sans contact et la pièce.Le guide est livré avec une butée pour assurer un impact réduit et également empêcher tout endommagement lors du levage de la pièce.
Déterminez la position de la pièce à l'aide des ventouses. Lors du transfert de la pièce, utilisez égale-ment un dispositif de préhension.Ceci garantit un contact réduit avec la pièce pendant le transfert.
Utilisez un ventouse en uréthane pour tout contact avec le dispositif de préhension. Cela permettra d'éviter d'utiliser un guide.
Lorsque vous utilisez plusieurs dispositifs de préhension sans contact
Pièce Ventouse
Pièce
Raisons de l'installation d'un guide
Exemples d'installation
Vis de réglage
Pour les vis de réglage, des options vendues séparément sont disponibles. Voir page 10.
Note) Lors de l'utilisation d'un guide avec une ventouse en uréthane, reportez-vous à la force-distance de préhension de la pièce à la page 11. Ensuite,pour le guide, réglez la force de préhension équivalente à une distance de 1.0 mm entre le dispositif de préhension sans contact et la pièce.
8
Dispositif de préhension sans contact Série XT661
8

Dispositif de préhension sans contact
Série XT661Pour passer commande
Modèle cyclonique
Modèle cyclonique à profil étroit
Diamètre du corps extérieur : ø
2A 20 mm4A 40 mm6A 60 mm8A 80 mm
10A 100 mm
Sens du tourbillon d'airR Sens horaireL Sens antihoraire
XT661 2A R
Diamètre du corps extérieur : ø
2A 20 mm3A 25 mm
Sens du tourbillon d'airR Sens horaireL Sens antihoraire
XT661 X2602A R
Modèle Bernoulli
Diamètre du corps extérieur : ø4C 39 mm6C 59 mm8C 79 mm
10C 99 mm
XT661 X3214C
Caractéristiques
4C 6C 8C 10C 120E 150EDiamètre du corps extérieur [mm] ø39 ø59 ø79 ø99 �120 �150
Raccord M5 x 0.8 Rc 1/8
Fluide Air∗
Pression d'utilisation 0.01 à 0.4 Mpa
Pression d'épreuve 0.6 MPa
Température ambiante et d'utilisation –5 à 40°C (hors gel)
Lubrifi ant Sans graisse
Matière du corps PBT
Masse [g] 26 55 108 170 260 410
∗ Taux de purifi cation de l'air : JIS B 8392-1 (ISO8573-1) Degré de qualité 4, 4, 2 min.
2A 4A 6A 8A 10ADiamètre du corps extérieur [mm] ø20 ø40 ø60 ø80 ø100
Raccord M5 x 0.8 Rc 1/8
Fluide Air∗
Pression d'utilisation 0.01 à 0.5 Mpa
Pression d'épreuve 0.75 MPa
Température ambiante et d'utilisation –5 à 60°C (hors gel)
Lubrifi ant Sans graisse
Matière du corps A2017
Masse [g] 12.5 49 114 206 310
∗ Taux de purifi cation de l'air : JIS B 8392-1 (ISO8573-1) Degré de qualité 4, 4, 2 min.
2A 3ADiamètre du corps extérieur [mm] ø20 ø25
Raccord ø1.6
Fluide Air∗
Pression d'utilisation 0.01 à 0.5 Mpa
Pression d'épreuve 0.75 MPa
Température ambiante et d'utilisation –5 à 40°C (hors gel)
Lubrifi ant Sans graisse
Matière du corps A2017
Masse [g] 1.33 2.13
∗ Utilisez de la colle pour fi xer le dispositif de préhension.∗ Taux de purifi cation de l'air : JIS B 8392-1 (ISO8573-1) Degré de qualité 4, 4, 2 min.
Modèle Bernoulli
Taille du corps : �120E 120 mm150E 150 mm
Accessoire— A B
Aucun
Guide Assemblage de vis de réglage
XT661 X322120E
99

Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
For
ce d
e pr
éhen
sion
[N]
Pression d'alimentation [MPa]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
For
ce d
e pr
éhen
sion
[N]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0
1
2
3
4
5
0
5
10
15
20
25
30
0
10
20
30
40
50
ø40
ø60
ø80
2.5
2
1.5
1
0.5
0
2.5
2
1.5
1
0.5
0
Taille : ø20 Taille: ø25
Taille : ø20 Taille: ø40/ø60/ø80 Taille : ø100
BDC
A
M Butée(Caoutchouc en uréthane)
Force de préhension [Modèle cyclonique ]
Force de préhension [Modèle cyclonique à profi l étroit]
Options vendues séparément : Butée externe (à commander séparément)
Modèle Plage de réglage [mm] A B C D MMXQ-A627 5 16.5
2.5 7 3 M5 x 0.8MXQ-A627-X11 15 26.5MXQ-A827 5 16.5
3 8 3.5 M6 x 1MXQ-A827-X11 15 26.5MXQ-A827-X12 25 36.5MXQ-A1227 5 20
4 12 4 M8 x 1MXQ-A1227-X11 15 30MXQ-A1227-X12 25 40MXQ-A1627 5 24.5
5 14 4 M10 x 1MXQ-A1627-X11 15 34.5MXQ-A1627-X12 25 44.5MXQ-A2027 5 27.5
6 17 5M12 x 1.25MXQ-A2027-X11 15 37.5
MXQ-A2027-X12 25 47.5MXQ-A2527 5 32.5
6 19 6M14 x
1.5MXQ-A2527-X11 15 42.5MXQ-A2527-X12 25 52.5
10
Dispositif de préhension sans contact Série XT661
10
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0
20
40
60
80
100
120
0
40
80
120
160
200
0
50
100
150
200
250
300
ø40/ø60/ø80
ø20/ø25
35
30
25
20
15
10
5
0
0
4
8
12
16
20
0
5
10
15
20
25
30
0
5
10
15
20
25
30
0
10
20
30
40
50
0
1
2
3
4
5
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
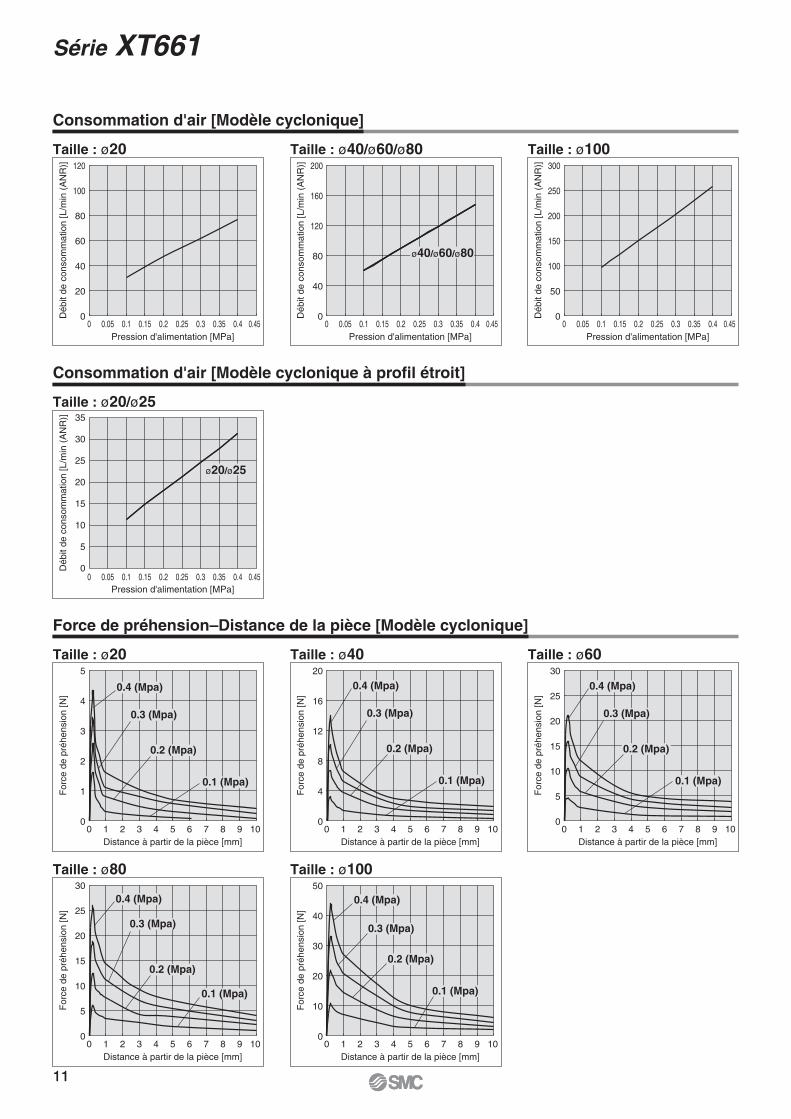
Taille : ø20 Taille : ø40/ø60/ø80 Taille : ø100
Taille : ø20/ø25
Taille : ø20 Taille : ø40 Taille : ø60
Taille : ø80 Taille : ø100
Consommation d'air [Modèle cyclonique]
Consommation d'air [Modèle cyclonique à profi l étroit]
Force de préhension–Distance de la pièce [Modèle cyclonique]
11
Série XT661
11

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
Déb
it de
con
som
mat
ion
[L/m
in (
AN
R)]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45Pression d'alimentation [MPa]
For
ce d
e pr
éhen
sion
[N]
Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
0
1
2
3
4
5
6
0
2
4
6
8
10
0
4
8
12
16
20
0
20
40
60
80
100
120
0
40
80
120
160
200
0
50
100
150
200
250
300
�120
�120/�150
�150
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
2.5
2
1.5
1
0.5
0
2.5
2
1.5
1
0.5
0
ø40/ø60/ø80
ø40
ø60
ø80
Taille : ø40/ø60/ø80 Taille : ø100 Taille : �120/�150
Taille : ø40/ø60/ø80 Taille : ø100 Taille : �120/�150
Taille : ø20 Taille : ø25
Force de préhension [Modèle Bernoulli]
Consommation d'air [Modèle Bernoulli]
Force de préhension–Distance de la pièce [Modèle cyclonique à profi l étroit]
12
Dispositif de préhension sans contact Série XT661
12

0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 1 2 3 4 5 6 7 8 9 10Distance à partir de la pièce [mm]
For
ce d
e pr
éhen
sion
[N]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0 0.5 1 1.5 2 2.5Temps [s]
Am
plitu
de [m
m]
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0
0.5
1
1.5
2
2.5
3
0
1
2
3
4
5
0
1
2
3
4
5
6
0
2
4
6
8
10
0
4
8
12
16
20
0
4
8
12
16
20
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
0.4 (Mpa)
0.3 (Mpa)
0.2 (Mpa)
0.1 (Mpa)
Taille : ø40 Taille : ø60 Taille : ø80
Taille : ø100 Taille : �120 Taille : �150
Taille : ø40 Taille : ø60 Taille : ø80
Taille : ø100 Taille : �120 Taille : �150
Vibration [Modèle Bernoulli] Pression d'alimentation : 0.1 MPa
Force de préhension–Distance de la pièce [Modèle Bernoulli]
∗ La cellule solaire �155 est utilisée seulement pour ces données.
13
Série XT661
13

A-AA-A
A
A
A
A
A-A
AA
A-A
e r q w
e
r q
w
q
w
q
w
Taille : ø20 Taille : ø40, ø60, ø80, ø100
Taille : ø20, ø25
Vue étendue
Construction [Modèle cyclonique]
Construction [Modèle cyclonique à profi l étroit]
NomenclatureN° Description Matière Note
1 Corps (R, L)Alliage d'aluminium
(Anodisé dur)
XT661-2A à 10A2 Corps M
Alliage d'aluminium(Anodisé dur)
3 Joint torique NBR
4 Vis CHC Acier inoxydable
NomenclatureN° Description Matière Note
1 Corps (R, L)Alliage d'aluminium
(Anodisé noir)XT661-2A, 3A
2 Corps MAlliage d'aluminium
(Anodisé noir)
14
Dispositif de préhension sans contact Série XT661

A-A
B-B
A
A
B
B
A-A
A
A
A-A o
C-C
!0
A-A
A
A
C-C
B-B A-A
C
C
BB
A
A
t y u q
e wr
u y t
q
w
e
i
r
w
i
u
y
tr
e
q
e
t
y
u
i
q
w
r
r
r
Taille : ø40 Taille : ø60
Assemblage de vis de réglage
Guide
Taille : ø80, ø100
Taille : �120, �150
Construction [Modèle Bernoulli]
NomenclatureN° Description Matière Note
1 Corps A Résine PBT
XT661-4C à 10CXT661-120E, 150E
2 Corps B Résine PBT
3 Joint torique NBR
4 Insert hélicoïdal Acier inoxydable
5 Rondelle plateAcier au chrome molybdène
(Chromé zingué)
6Rondelle élastique
Acier au chrome molybdène(Chromé zingué)
7 Vis CHCAcier au chrome molybdène
(Chromé zingué)
8 Bouchon Laiton/NBR/acier inoxydable Sauf XT661-4C
9 GuidePOM//Acier au chrome
molybdène(Chromé zingué) Accessoires pour
XT661-120E, 150E
10Assemblage de vis de réglage
Polyuréthane/Acier au chrome molybdène, acier doux
(Chromé zingué)
15
Série XT661

XT661-10A-(R, L)XT661-8A-(R, L)
XT661-6A-(R, L)XT661-4A-(R, L)XT661-2A-(R, L)
XT661-3A-(R, L)-X260XT661-2A-(R, L)-X260
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
øD
16.5
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
øD
16.5
2 x M profondeur ML11.6
16.5
øD
P profondeur PLOrifice d’alimentation en air
øD
16.5
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en airP profondeur PL
Orifice d’alimentation en air
4 x M profondeur ML
øD
16.5
45° 45°
P.C.D. C45° 45°
P.C.D. C
45° 45°
P.C.D. C45° 45°
P.C.D. C
1.8 ø20
ø1.6Orifice d’alimentation en air
ø1.6Orifice d’alimentation en air
ø25
1.8
[mm]
Réf. P PL M ML C DXT661-2A-(R, L) M5 x 0.8 5 M2 x 0.4 3.2 — 20XT661-4A-(R, L) M5 x 0.8 5 M4 x 0.7 5 32.8 40XT661-6A-(R, L) M5 x 0.8 5 M4 x 0.7 5 47 60XT661-8A-(R, L) Rc 1/8 — M4 x 0.7 5 47 80XT661-10A-(R, L) Rc 1/8 — M4 x 0.7 5 47 100
Dimensions [Modèle cyclonique]
Dimensions [Modèle cyclonique à profi l étroit]
16
Dispositif de préhension sans contact Série XT661

XT661-150E-X322
XT661-10C-X321
XT661-6C-X321
XT661-120E-X322
XT661-8C-X321
XT661-4C-X321
16.5
øD
4 x M profondeur ML
H
P profondeur PLOrifice d’alimentation en air
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
16.5
øD
H
H
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
H
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
øD
16.5
øD
16.5
45° 45°
45° 45°
45°45°45° 45°
P.C.D. C
P.C.D. C
P.C.D. C
P.C.D. C
16.5
L
LH
4 x M profondeur ML
P profondeur PLOrifice d’alimentation en air
16.5
LH
P profondeur PLOrifice d’alimentation en air
4 x Mprofondeur ML
L
45° 45°
P.C.D. C
45° 45°
P.C.D. C
[mm]
Réf. P PL M ML C H D LXT661-4C-X321 M5 x 0.8 5 M4 x 0.7 8 32 6 39 —XT661-6C-X321 M5 x 0.8 6 M4 x 0.7 6 47 11 59 —XT661-8C-X321 M5 x 0.8 6 M4 x 0.7 6 47 17 79 —XT661-10C-X321 Rc 1/8 — M4 x 0.7 6 47 23 99 —XT661-120E-X322 Rc 1/8 — M5 x 0.8 7 72 30.5 — 120XT661-150E-X322 Rc 1/8 — M5 x 0.8 7 72 37.5 — 150
Dimensions/équerre [Modèle Bernoulli]
17
Série XT661

150 à 162(Réglable)
70
54
3
(7.3
)3.
5
120 à 132(Réglable)
70
54
3
3.5
(7.3
)
90
ø3
(1)
(Rég
labl
e)
114
ø3
(1)
(Rég
labl
e)
Taille : �120 Taille : �150
Taille : �150Taille : �120
Avec guide
Avec assemblage de vis de réglage
Dimensions/équerre [Modèle Bernoulli]
18
Dispositif de préhension sans contact Série XT661

Lithuania +370 5 2308118 www.smclt.lt [email protected] +31 (0)205318888 www.smcpneumatics.nl [email protected] +47 67129020 www.smc-norge.no [email protected] +48 (0)222119616 www.smc.pl [email protected] +351 226166570 www.smc.eu [email protected] +40 213205111 www.smcromania.ro [email protected] +7 8127185445 www.smc-pneumatik.ru [email protected] +421 (0)413213212 www.smc.sk [email protected] +386 (0)73885412 www.smc.si [email protected] +34 902184100 www.smc.eu [email protected] +46 (0)86031200 www.smc.nu [email protected] +41 (0)523963131 www.smc.ch [email protected] +90 212 489 0 440 www.smcpnomatik.com.tr [email protected] UK +44 (0)845 121 5122 www.smcpneumatics.co.uk [email protected]
Les caractéristiques peuvent être modifiées sans avis préalable ni obligation de la part du fabricant.SMC CORPORATION Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: 03-5207-8249 FAX: 03-5298-5362
1st printing ST printing ST 00 Printed in Spain
Austria +43 (0)2262622800 www.smc.at [email protected] +32 (0)33551464 www.smcpneumatics.be [email protected] +359 (0)2807670 www.smc.bg [email protected] Croatia +385 (0)13707288 www.smc.hr [email protected] Republic +420 541424611 www.smc.cz [email protected] Denmark +45 70252900 www.smcdk.com [email protected] Estonia +372 6510370 www.smcpneumatics.ee [email protected] +358 207513513 www.smc.fi [email protected] +33 (0)164761000 www.smc-france.fr [email protected] +49 (0)61034020 www.smc.de [email protected] +30 210 2717265 www.smchellas.gr [email protected] +36 23511390 www.smc.hu [email protected] +353 (0)14039000 www.smcpneumatics.ie [email protected] +39 0292711 www.smcitalia.it [email protected] +371 67817700 www.smclv.lv [email protected]
SMC Corporation (Europe)


















