Discriminative Learning of Relaxed Hierarchy for Large...
8
Discriminative Learning of Relaxed Hierarchy for Large-scale Visual Recognition — Supplementary Material Tianshi Gao Dept. of Electrical Engineering Stanford University [email protected] Daphne Koller Dept. of Computer Science Stanford University [email protected] 1. Introduction In this supplementary material, we first discuss how to efficiently solve the optimization problem (2) in Section 3.2 of the main paper. Then, we present two theorems for the generalization error of our model and discuss how our method is related to minimizing the error bound in Sec- tion 3. In Section 4, we prove the main theorems. Finally, we show the learned hierarchies for both the Caltech-256 and the SUN datasets in Section 5. 2. Optimization In this section, we present an efficient algorithm to solve the optimization problem (2) in Section 3.2 of the main paper. We first ignore the constraint ∑ K k=1 1{μ k > 0}≥ 1 and ∑ K k=1 1{μ k < 0}≥ 1, and discuss how to solve (1) efficiently. min {μ k } C K k=1 n k ( 1{μ k = +1} ( 1 n k i:yi=k ξ + i - A C ) + 1{μ k = -1} ( 1 n k i:yi=k ξ - i - A C ) ) s.t. μ k ∈ {-1, 0, +1}, ∀k ∈Y - B ≤ K k=1 μ k ≤ B (1) Let f k (μ k )= Cn k ( 1 n k ∑ i:yi=k ξ - i - ρ) if μ k = -1 0 if μ k =0 Cn k ( 1 n k ∑ i:yi=k ξ + i - ρ) if μ k =1 (2) where ρ = A C . Then the objective function in (1) can be written as ∑ k f k (μ k ). Let μ k = argmin μ k f k (μ k ). Then ∑ k f k (μ k ) is the lowest possible value the objective func- tion can take regardless of the constraint. To facilitate later discussion, we define S + = {k|μ k =1}, S 0 = {k|μ k =0} and S - = {k|μ k = -1}. Furthermore, to simplify the dis- cussion we assume B is a positive integer, i.e., B ≥ 1. For B =0, the principles of the following discussions remain the same with some special considerations of corner cases. Let B = ∑ k μ k . According to different relations between B and B, there are three cases. First, if -B ≤ B ≤ B, then the optimal solution of (1) is μ k = μ k , ∀k. Second, if B >B, we first characterize the relations between the optimal solution {μ k } K k=1 and {μ k } K k=1 , and then provide an efficient algorithm to find such an optimal solution. Note that for the third case, i.e., B < -B, we can use an analogous procedure to find the optimal solution similar to the case of B >B by symmetry. We first prove the following theorem characterizing the optimal solution of (1). Theorem 2.1. If B = ∑ k μ k >B, then there exists an optimal solution {μ k } K k=1 such that B = B or B - 1, where B = ∑ k μ k (note that B - 1 > -B, since we assume B ≥ 1). Proof. Given an optimal solution {μ k } K k=1 , suppose B ≤ B - 2. We have ∑ k μ k - ∑ k μ k = ∑ k (μ k - μ k )= ∑ k∈S - (μ k -μ k )+ ∑ k∈S 0 (μ k -μ k )+ ∑ k∈S + (μ k -μ k )= B - B ≥ B - B +2. Since ∑ k∈S - (μ k - μ k )= ∑ k∈S - (-1 - μ k ) ≤ 0 (∵ μ k ∈ {-1, 0, 1}≥-1), we have ∑ k∈S 0 (μ k - μ k )+ ∑ k∈S + (μ k - μ k ) ≥ B - B +2 > 2. This implies that, there exists at least one ˜ k ∈ S o ∪ S + such that μ ˜ k - μ * ˜ k =1 or 2. Now we construct a solution by changing μ * ˜ k to μ ˜ k , and keep other μ * k ’s unchanged. Then for the new solution, ˜ B = μ ˜ k + ∑ k= ˜ k μ k = B +μ ˜ k -μ * ˜ k ≤ B +2 ≤ B. This means that the new solution is a feasible solution. In terms of the objective value, since f ˜ k (μ ˜ k ) ≤ f ˜ k (μ * ˜ k ) (by definition), the objective value of the new solution is no worse than that of {μ k } K k=1 . If f ˜ k (μ ˜ k ) is
Transcript of Discriminative Learning of Relaxed Hierarchy for Large...

Discriminative Learning of Relaxed Hierarchy for Large-scale VisualRecognition — Supplementary Material
Tianshi GaoDept. of Electrical Engineering
Stanford [email protected]
Daphne KollerDept. of Computer Science
Stanford [email protected]
1. Introduction
In this supplementary material, we first discuss how toefficiently solve the optimization problem (2) in Section3.2 of the main paper. Then, we present two theorems forthe generalization error of our model and discuss how ourmethod is related to minimizing the error bound in Sec-tion 3. In Section 4, we prove the main theorems. Finally,we show the learned hierarchies for both the Caltech-256and the SUN datasets in Section 5.
2. Optimization
In this section, we present an efficient algorithm to solvethe optimization problem (2) in Section 3.2 of the mainpaper. We first ignore the constraint
∑Kk=1 1{µk > 0} ≥
1 and∑K
k=1 1{µk < 0} ≥ 1, and discuss how to solve (1)efficiently.
min{µk}
C
K∑k=1
nk
(1{µk = +1} (
1nk
∑i:yi=k
ξ+i −
A
C)
+ 1{µk = −1} (1nk
∑i:yi=k
ξ−i −A
C))
s.t. µk ∈ {−1, 0,+1}, ∀k ∈ Y
−B ≤K∑
k=1
µk ≤ B
(1)
Let
fk(µk) =
Cnk( 1
nk
∑i:yi=k ξ−i − ρ) if µk = −1
0 if µk = 0Cnk( 1
nk
∑i:yi=k ξ+
i − ρ) if µk = 1(2)
where ρ = AC . Then the objective function in (1) can be
written as∑
k fk(µk). Let µ′k = argminµkfk(µk). Then∑
k fk(µ′k) is the lowest possible value the objective func-tion can take regardless of the constraint. To facilitate later
discussion, we define S′+ = {k|µ′k = 1}, S′0 = {k|µ′k = 0}and S′− = {k|µ′k = −1}. Furthermore, to simplify the dis-cussion we assume B is a positive integer, i.e., B ≥ 1. ForB = 0, the principles of the following discussions remainthe same with some special considerations of corner cases.Let B′ =
∑k µ′k. According to different relations between
B′ and B, there are three cases.First, if −B ≤ B′ ≤ B, then the optimal solution of (1)
is µ?k = µ′k, ∀k.
Second, if B′ > B, we first characterize the relationsbetween the optimal solution {µ?
k}Kk=1 and {µ′k}Kk=1, andthen provide an efficient algorithm to find such an optimalsolution. Note that for the third case, i.e., B′ < −B, wecan use an analogous procedure to find the optimal solutionsimilar to the case of B′ > B by symmetry.
We first prove the following theorem characterizing theoptimal solution of (1).
Theorem 2.1. If B′ =∑
k µ′k > B, then there exists anoptimal solution {µ?
k}Kk=1 such that B? = B or B − 1,where B? =
∑k µ?
k (note that B − 1 > −B, since weassume B ≥ 1).
Proof. Given an optimal solution {µ?k}Kk=1, suppose B? ≤
B − 2. We have∑
k µ′k −∑
k µ?k =
∑k(µ′k − µ?
k) =∑k∈S′−
(µ′k−µ?k)+
∑k∈S′0
(µ′k−µ?k)+
∑k∈S′+
(µ′k−µ?k) =
B′ − B? ≥ B′ − B + 2. Since∑
k∈S′−(µ′k − µ?
k) =∑k∈S′−
(−1−µ?k) ≤ 0 (∵ µ?
k ∈ {−1, 0, 1} ≥ −1), we have∑k∈S′0
(µ′k − µ?k) +
∑k∈S′+
(µ′k − µ?k) ≥ B′ −B + 2 > 2.
This implies that, there exists at least one k̃ ∈ S′o∪S′+ suchthat µ′
k̃− µ∗
k̃= 1 or 2. Now we construct a solution by
changing µ∗k̃
to µ′k̃, and keep other µ∗k’s unchanged. Then
for the new solution, B̃ = µ′k̃+
∑k 6=k̃ µ?
k = B?+µ′k̃−µ∗
k̃≤
B? + 2 ≤ B. This means that the new solution is afeasible solution. In terms of the objective value, sincefk̃(µ′
k̃) ≤ fk̃(µ∗
k̃) (by definition), the objective value of the
new solution is no worse than that of {µ?k}Kk=1. If fk̃(µ′
k̃) is

strictly less than fk̃(µ∗k̃), then we find another feasible so-
lution with better objective value, which is contradictory tothe optimality of {µ?
k}Kk=1. Thus, B? > B−2, i.e., B? = B
or B−1. Otherwise if fk̃(µ′k̃) = fk̃(µ∗
k̃), if B̃ > B−2, then
we find an optimal solution satisfying the statement in thetheorem, otherwise if B̃ ≤ B− 2, we can recursively applythe same argument above based on the newly constructedoptimal solution, which will lead to contradiction or even-tually find an optimal solution satisfying the condition inthe theorem.
We present another theorem which shows another prop-erty of the optimal solution:
Theorem 2.2. If B′ =∑
k µ′k > B, among the optimal so-lutions satisfying the condition in Theorem 2.1, there existsan optimal solution {µ?
k}Kk=1 such that ∀k ∈ S′−, µ?k = µ′k.
Proof. Suppose there exists an optimal solution (satisfyingthe condition in Theorem 2.1) with some k̃ ∈ S′− such thatµ?
k̃6= µ′
k̃= −1. Similar to the analysis in the proof of The-
orem 2.1, we have∑
k µ′k −∑
k µ?k =
∑k(µ′k − µ?
k) =∑k∈S′−
(µ′k − µ?k) +
∑k∈S′0
(µ′k − µ?k) +
∑k∈S′+
(µ′k −µ?
k) = B′ − B? ≥ B′ − B ≥ 1. Thus,∑
k∈S′0(µ′k −
µ?k) +
∑k∈S′+
(µ′k − µ?k) ≥ 1 −
∑k∈S′−
(µ′k − µ?k) ≥ 2
(∵ µ′k̃− µ?
k̃≤ −1). This implies that, there exists at least
two j ∈ S′o ∪ S′+ such that µ′j − µ?j = 1 and/or at least
one i ∈ S′+ such that µ′i − µ?i = 2. Now we construct a
new solution by first changing µ?k̃
to µ′k̃
= −1. If µ?k̃
was1, then we also change two µ?
j to µ′j = µ?j + 1, or change
one µ?i to µ′i = µ?
i + 2. If µ?k̃
was 0, we change one µ?j to
µ?j + 1 or change one µ?
i to µ′i = µ?i + 2 (only when there
is no single j such that µ′j − µ?j = 1). The new solution
still has Bnew = B? or B? +1 (only when there is no singlej such that µ′j − µ?
j = 1, which implies B? = B − 1 asshown in the algorithm). Therefore, the new solution is stillfeasible. However, since we changed µ?
k̃to µ′
k̃and some µ?
j
to µ′j or µ?i to µ′i, the objective value becomes no worse. If
the new solution has lower objective value, then by contra-diction, we conclude that ∀k ∈ S′−, µ?
k = µ′k. If the newsolution has the same objective value, we can use the sameargument above based on this new solution, which will leadto contradiction (thus proving the theorem) or construct anoptimal solution such that ∀k ∈ S′−, µ?
k = µ′k, which isconsistent with the statement in the theorem.
Similar to Theorem 2.2, the following statement is alsotrue.
Theorem 2.3. If B′ =∑
k µ′k > B, among the opti-mal solutions satisfying both the conditions in Theorem 2.1and Theorem 2.2, there exists an optimal solution {µ?
k}Kk=1
such that ∀k ∈ S′0, µ?k = µ′k = 0 or µ?
k = −1. In otherwords, there is no k ∈ S′0 such that µ?
k = 1.
Proof. Follow the same principle of the proof for Theo-rem 2.2. Basically, if there is some k̃ ∈ S′0 such thatµ?
k̃= 1 > µ′
k̃= 0, then we can always construct another
solution by changing µ?k̃
to µ′k̃
= 0 and increase some otherµ?
j to µ′j where j ∈ S′o ∪S′+. This new solution will be fea-sible and has an objective value that is no worse than that ofthe previous optimal solution. If the new solution has lowerobjective value, then we have a contradiction, thus provingthe theorem. Otherwise, we can repeat such construction,which will lead to contradiction or eventually construct an-other optimal solution satisfying the condition in the theo-rem.
Based on the above theorems, we can transform the orig-inal problem (1) to:
min{µk}
K∑k=1
fk(µk)− fk(µ′k)
s.t. ∀k ∈ S′−, µk = µ′k = −1∀k ∈ S′0, , µk ∈ {−1, 0}∀k ∈ S′+, , µk ∈ {−1, 0, 1}∑k∈S′0
(µ′k − µk) +∑
k∈S′+
(µ′k − µk)
= B′ −B or B′ −B + 1
(3)
Since fk(µk) ≥ fk(µ′k), for any k such that µk 6= µ′k,it will incur a non-negative increase in the objective. Thus,the optimal solution {µ?
k} should have as few differencesfrom {µ′k} as possible. However, the last constraint in (3)requires that the sum of the difference between {µ′k} and{µk} is B′−B or B′−B+1. Then the problem (3) is equiv-alent to finding a subset of k’s from S′0∪S′+ and change thevalues of those µk from µ′k to some other values such thatthe sum of the difference is B′−B or B′−B +1 while thecost of these changes is the minimum (corresponding to theminimum objective value). To achieve this requirement, fork ∈ S′0, if we change µk from µ′k = 0 to −1, it will con-tribute µ′k − µk = 1. However, it incurs a delta increase inthe objective ∆k = fk(−1)− fk(0). For k ∈ S′+, there aretwo cases. The first is to change µk from µ′k = 1 to 0, whichwill contribute µ′k−µk = 1 to the difference while incurringa delta increase in the objective ∆k,0 = fk(0)− fk(1). Thesecond case is to change µk from µ′k = 1 to −1, which willcontribute µ′k − µk = 2 to the difference while incurring adelta increase in the objective ∆k,− = fk(−1) − fk(1).We also denote ∆k = fk(−1) − fk(0) for k ∈ S′+.Note that ∆k,− = ∆k,0 + ∆k. The interpretation of ∆k,∆k,0 and ∆k,−
2 is that they are the cost per unit increase

in∑
k∈S′0(µ′k − µk) +
∑k∈S′+
(µ′k − µk) for different k’s.Therefore, we can sort these costs and select those changeswith the smallest costs until the constraint is satisfied. Weformulate this idea in Algorithm 1. Note that the compu-tations in Algorithm 1 consists of some linear scan compo-nents, i.e., computing and selecting ∆’s, and a sorting com-ponent. Therefore, the overall complexity is O(K log K).
Now we discuss the case where we add another constraint∑Kk=1 1{µk > 0} ≥ 1 and
∑Kk=1 1{µk < 0} ≥ 1 to (1).
If the optimal solution {µ?k}Kk=1 of (1) already satisfies the
new constraint, then there is no modification needed. Oth-erwise, we discuss three cases corresponding to differentrelations between B′ and B.
First, for −B ≤ B′ ≤ B (µ?k = µ′k), if there is no µ?
k
equals to −1, then we select j such that the delta increaseby changing µ?
j to −1 is the smallest, and set µ?j to −1. It’s
easy to show that this new solution always satisfies the con-straint −B ≤
∑Kk=1 µ?
k ≤ B. We do the analogous step ifthere is no µ?
k equals to 1. Since the delta changes (with re-spect to the best possible value
∑k fk(µ′k)) in the objective
function is the minimum, the new solution is optimal.Second, for B′ > B, we focus on the case of B > 1,
since there will be at least one µ?k = 1 (since B? =∑
k µ?k = B or B−1 > 0). In addition, as long as S′− is not
empty, then there is at least one µ?k = −1, where k ∈ S′−.
If S′− is empty and no µ?k from the solution of (1) equals to
−1, we can find the smallest ∆j from S∆ when Algorithm 1terminates, and the largest ∆i,0 from S̄∆, and set µ?
j = −1and µ?
i = 1.Third, for B′ < −B, we can use an analogous procedure
to find the optimal solution similar to the case of B′ > Bby symmetry.
3. Analysis of Generalization Error
In this section we analyze the generalization error of ourmodel based on the techniques developed for perceptron de-cision tree [2]. Given a model represented by G, for eachnode j ∈ G, define the margin at node j as
γj = min{xi:µj,yi
=±1,(xi,yi)∈D}|wT
j xi + bj | (4)
where D is a given training set, {µj,k} is the coloring atnode j and (wj , bj) specifies the decision hyperplane.
Theorem 3.1. Suppose m random samples are correctlyclassified using G on K classes containing NG decisionnodes with margins {γj ,∀j ∈ G}, then the generalizationerror with probability greater than 1− δ is less than
130R2
m
(D′ log(4em) log(4m) + NG log(2m)− log(
δ
2))
(5)
where D′ =∑NG
j1γ2
j, and R is the radius of a ball con-
taining the distribution’s support.
We first discuss the implications of this theorem and thenpresent the proof in Section 4. Theorem 3.1 reveals two im-portant factors to reduce generalization error bound: thefirst is to enlarge the margin γj and the second is to con-trol the complexity of the model by reducing the number ofdecision nodes NG. There is a trade-off between these twoquantities. Consider two extreme cases: on one hand, toreduce NG, we want to have a balanced binary tree whereeach node encourages all classes to participate. However,in this case, the margins are likely to be small since a largesubset of classes has to be separated from another subset.On the other hand, to increase the margins, each node canconsider only two classes, which is the case of DAGSVM.However, in this case, the number of nodes is quadratic inthe number of classes K, while the first case is only lin-ear in K. Therefore, a good balance has to be establishedto enjoy a good generalization error. Our method charac-terized by the optimization problem (1) in the main paperis seeking such a good trade-off. The objective functionencourages classes to participate to control the model com-plexity and ignores a subset of classes with small margins tomaximize the resulting margins. A particular trade-off be-tween these two parts is controlled by the parameter ρ in ourmodel. Compared to previous methods, for DAGSVM, ourmethod takes advantage of the hierarchical structure in thelabel space to reduce the model complexity, and for other hi-erarchical methods, our method achieves larger margins byignoring a subset of classes at each node and the joint max-margin optimization of the partition and the binary classi-fier.
Instead of considering the overall error for all classes, wecan also bound the generalization error for a specific classk in terms of the nodes in which class k is active. We definethe probability of error for class k as
εk(G) = P (x,y)∼D{(y = k but fG(x) 6= k)or (y 6= k but fG(x) = k)}
(6)
where fG : X → Y is the decision function induced by Gand D is some distribution from which (x, y)’s are drawn.
Theorem 3.2. Suppose in a random m-sample, we are ableto correctly distinguish class k from the other classes usingG containing NG decision nodes with margins {γj ,∀j ∈G}. In addition, suppose the number of nodes in whichclass k is active is NG(k). Then with probability greaterthan 1− δ,
εk(G) ≤ 130R2
m
(D′
k log(4em) log(4m)
+ NG(k) log(2m)− log(δ
2)) (7)

where D′k =
∑j∈k-nodes
1γ2
j(k-nodes are the set of nodes
in which class k is active), and R is the radius of a ballcontaining the distribution’s support.
Please refer to the next section for the proof. This theo-rem implies that the error for a class k will be small if it hasa short decision path with large margins along the path, andvice versa.
4. Proof of Theorems
The proof of Theorem 3.1 and Theorem 3.2 closely re-sembles the proof of the Theorem 1 in [3] which is basedon the technique developed for studying perceptron deci-sion trees [2]. We present the key steps for proving the the-orem and more details on this style of proof can be foundin [2].
Definition 1. Let F be a set of real valued functions. Wesay that a set of points X is γ-shattered by F relative tor = (rx)x∈X if there are real numbers rx indexed by x ∈ Xsuch that for all binary vectors b indexed by X , there is afunction fb ∈ F satisfying fb(x) ≥ rx + γ, if bx = 1, andfb(x) ≤ rx − γ otherwise. The fat shattering dimensionfatF of the setF is a function from the positive real numbersto the integers which maps a value γ to the size of the largestγ-shattered set, if this is finite, or infinity otherwise.
We consider the class of linear function: Flin = {x →〈w, x〉+ θ : ‖w‖ = 1}.
Theorem 4.1 (Bartlett and Shawe-Taylor [1]). Let Flin berestricted to points in a ball of n dimensions of radius Rabout the origin. Then
fatFlin(γ) ≤ min{R
2
γ2, n + 1} (8)
We now give a lemma which bounds the probability oferror over a sequence of 2m samples where the first m sam-ples x̄1 have zero error, and the second m samples x̄2 haveerror greater than an appropriate ε. We denote the model asG and the number of decision nodes as NG.
Lemma 1. Let G be a model on K classes with NG de-cision nodes with margins {γ1, γ2, . . . , γNG
}. Let ki =fatFlin
(γi
8 ), where fat is continuous from the right. Thenthe following bound holds, P 2m{x̄1x̄2 : ∃ a graph G:∀x ∈ x̄1 and ∀i, G correctly separates classes S−i and S+
i
at node i, then a fraction of points misclassified in x̄2 >ε(m,K, δ)} < δ, where ε(m,K, δ) = 1
m (D log(8m) +log( 2NG
δ )), D =∑NG
i=1 ki log( 4emki
) and S−i and S+i are
the negative and positive classes at node i.
Proof. The proof follows the same arguments used by theproof of Lemma 3.7 in [2] or the proof of Lemma 4 in [3].
Lemma 1 applies to a particular G with specified mar-gins {γi}. In practice, we observe the margins after learningthe model. To obtain a bound that can be better applied inpractice, we want to bound the probabilities uniformly overall possible margins that can arise. This gives rise to Theo-rem 3.1. The proof follows the same arguments by the proofof Theorem 1 in [3] based on Lemma 1.
Now we proceed to discuss the generalization errorbound for the probability of error for a single class k. Letthe Sk-nodes be the set of nodes in G where class k is active.We denote the probability of error for Sk-nodes as ε′k(G), i.e.,ε′k(G) is the probability that any of i ∈ Sk-nodes makes mis-take. We first present a lemma for the generalization errorbound for ε′k(G).
Lemma 2. Suppose in a random m-sample, there is no mis-take made by any node i ∈ Sk-nodes. In addition, G hasmargins {γj ,∀j ∈ G}. Denote NG(k) = |Sk-nodes|, i.e., thenumber of nodes in G where class k is active. Then withprobability greater than 1− δ,
ε′k(G) ≤ 130R2
m
(D′
k log(4em) log(4m)
+ NG(k) log(2m)− log(δ
2)) (9)
where D′k =
∑j∈Sk-nodes
1γ2
j, and R is the radius of a ball
containing the distribution’s support.
Proof. The proof follows exactly Lemma 1 and Theo-rem 3.1.
Now we prove the last theorem by exploiting the relationbetween ε′k(G) and εk(G):
Proof of Theorem 3.2. We first prove that ε′k(G) ≥ εk(G).Consider a node i ∈ Sk-nodes, whose positive and negativeclasses are S+
i and S−i respectively. We study how a bi-nary error in i relates to the error for class k. Without lossof generality, we assume k ∈ S+
i . Suppose there is a mis-take made on instance x from S+
i /{k}, i.e., x is classifiedas negative by the binary classifier. This implies that x willnot be classified as class k which is a correct classificationgiven the definition of the error for class k. Furthermore,if there is a mistake made on instance x from S−i , i.e., x isclassified as positive in node i, then it is still possible thatlower levels will prune away class k for x, leading to correctclassification if we are only considering the error for classk. Finally, if there is a binary mistake on instance x fromclass k, then it also counts as an error in terms of the errorfor class k. In summary, if there are some binary classifi-cation errors in some nodes in Sk-nodes, these “errors” maynot hold true if we consider the error only for class k. Onthe other hand, if there is an error for class k either because

we classified instances from class k not as k or because weclassified instances from non-k classes as k, there must beat least one binary error in some i ∈ Sk-nodes (since no er-ror in all binary classifications implies no error for class k).Therefore, ε′k(G) ≥ εk(G). With this relation and basedon Lemma 2, the statement of Theorem 3.2 is true.
5. Learned Hierarchy
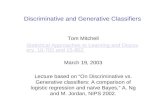
We present three learned hierarchies using different rep-resentations on two datasets. Figure 1 shows the first fivelevels of the learned hierarchy using dense SIFT based fea-ture with extended Gaussian kernel based on χ2 distance onthe Caltech-256 dataset. Figure 2 shows the first five lev-els of the learned hierarchy using GIST with RBF kernel onthe SUN dataset. Figure 3 shows the first five levels of thelearned hierarchy using spatial HOG with histogram inter-section kernel on the SUN dataset. Note that the hierarchieslearned on the same dataset with different representationsare different (see Figure 2 and Figure 3).
References
[1] P. Bartlett and J. Shawe-Taylor. Generalization performanceof support vector machines and other pattern classifiers. Ad-vances in Kernel Methods - Support Vector Learning, 1998.4
[2] P. Bennett, N. Cristianini, J. Shawe-taylor, and W. D. En-larging the margins in perceptron decision trees. In MachineLearning, 2000. 3, 4
[3] J. C. Platt, N. Cristianini, and J. Shawe-taylor. Large margindags for multiclass classification. In NIPS, 2000. 4
Algorithm 1 An efficient algorithm for solving (3)1: Initialize ∀k, µk = µ′k. Let d = 0, and let S∆ and S̄∆
be two empty sets.2: For each k ∈ S′0, compute ∆k = fk(−1)− fk(0), and
let S∆ ← S∆ ∪ {∆k}.3: For each k ∈ S′+, compute ∆k = fk(−1) − fk(0),
∆k,0 = fk(0) − fk(1) and ∆k,− = ∆k,0 + ∆k . If∆k,0 ≤ ∆k, then let S∆ ← S∆ ∪ {∆k,0,∆k}. Other-wise, let S∆ ← S∆ ∪ {∆k,−
2 ,∆k,0}.4: repeat5: Pop out the first (minimum) element ∆min from S∆.
S∆ ← S∆\{∆min}6: if ∆min = ∆k then7: Let µk = −1 and d← d + 1.8: end if9: if ∆min = ∆k,0 then
10: Let µk = 0 and d← d + 1.11: end if12: if ∆min = ∆k,−
2 then13: if d ≤ B′ −B − 2 then14: Let µk = −1 and d← d + 2.15: S∆ ← S∆\{∆k,0}16: else // d = B′ −B − 117: Find the next smallest ∆j or ∆j,0 from S∆ and
let it be ∆j,min.18: Find the largest ∆i or ∆i,0 from S̄∆, and let it
be ∆i,max (if there does not exist such i, thenlet ∆i,max = 0).
19: For ∆l,− ∈ S̄∆, find the l with the largest∆l,− − ∆l,0, denote the largest difference as∆l,max (if S̄∆ does not contain ∆l,−, then let∆l,max = 0).
20: Let ∆one-step-min be the minimum of{∆j,min,∆k,− −∆i,max,∆k,− −∆l,max}.
21: if ∆one-step-min = ∆j,min then22: if ∆j,min = ∆j then23: Let µj = −124: else25: Let µj = 026: end if27: d← d + 128: else if ∆one-step-min = ∆k,− −∆i,max then29: Let µk = −1.30: if i exists then31: µi = µ′i32: d← d + 133: else34: d← d + 235: end if36: else // ∆one-step-min = ∆k,− −∆l,max
37: Let µl = 0 and µk = −138: d← d + 139: end if40: end if41: end if42: S̄∆ ← S̄∆ ∪ {∆min}43: until d = B′ −B or d = B′ −B + 1Return: {µk}Kk=1

Node 2, 0 , 0
Node 1
ak47
Negative: Positive:
tweezer
zebra
camelIgnore :
vcr fern
Negative: Positive: Ignore :
microscope
Playing-card
ostrich
elephant-101
Node 3
Boom-boxNegative: Positive:
vcrtoaster waterfall
bearIgnore :
breadmaker
toadVideo-projector
Computer-monitor gorilla
Negative: Positive:canoe
kayak
Ignore
American-flagNegative: Positive:
Paper-shredder
camel
ostrich
Ignore
chopsticksNegative: Positive:
Tuning-fork
fern
mushroom
Ignore
frisbeeNegative: Positive:
waterfallHead-phones
fern
toad
cactusIgnore
, 0 , 0Node 4 Node 5 , 0 , 0
Node 6 Node 7
ak47Negative: Positive:
Car-tire
Roulette-wheel
Ignore
Node 8
vcr
grapes
snake
backpackNegative: Positive:
bulldozer
ostrich
Ignore
Node 11
American-flagNegative: Positive:
camel
ostrich
Ignore
Node 12
French-hornNegative: Positive:
Yo-yo
bear
gorilla
Ignore
Node 15
tweezer vcr
American-flag
Negative: Positive:Baseball-bat
rainbow
Ignore
Node 17Negative: Positive: Ignore
Node 22
backpackNegative: Positive:
bulldozer
kayak
Ignore
Node 25
Welding-mask
Touring-bikeNegative: Positive:
comet
galaxy
Ignore
Node 30
Mountain-bike
, 0
, 0
, 0 , 0
, 0
, 0
Node9
Node10
, 0
Node13
, 0
Node14
, 0 , 0
, 0 , 0
Node16
Node23
Node24
Node31
, 0, 0, 0 , 0
Hierarchy Learned using dense SIFT with extended Gaussian Kernel based Chi2 distance
Welding-mask
backpack birdbath
tombstone
Welding-mask
fernbear
toadraccoon
skunk elk
mushroomiris
porcupine
gorilla
chimp grape
water fallkangaroosword
ak47 computer-mouse diamond-ring eyeglasses flashlight
lightbulb spoon syringe
Frying-pan
screwdrivertweezer
microwave
calculatorWashing-machine
photocopier
harmonica
refrigeratorak47
tweezer
flashlight
saturn
Figure 1. The first five levels of the learned hierarchy using dense SIFT based feature with extended Gaussian kernel based on χ2 kernelon the Caltech-256 dataset.

Node 2, 0 , 0
Node 1
bamboo forestNegative: Positive:
vineyardforest road
lake/natural
booth/indoortree farm
bakery/shopIgnore :
bar arrival_gate
Negative: Positive:
tree houserainforest
cottage garden forest/broadleaf
closing storerope bridge
forest/needleleafbow window/outdoor
swamp
botanical gardenbamboo forest forest path
baseball fieldmusic store
athletic field/outdoor
vegetable garden
Ignore :
living room
church/outdoorbathroom hotel_room hangar/outdoor nuclear power plant/outdoor
beach butte coast
supermarket
lighthouse
filed/wild
desert/vegetation
dinner/indoor
fairway
candy store casino/indoor
Node 3
barnNegative: Positive:
wind farmhayfield
airplane cabin
classroomcoffee shop
auditoriumIgnore :
butte
galleybeach
field/wild bakery/shop
forest pathNegative: Positive:
orchard
art studio
dorm room
Ignore
barn forest broadleafNegative: Positive:
forest/needleleaf
control room
cubicle/office
Ignore
tree farmNegative: Positive:
hill
berth
game room
Ignore
campusNegative: Positive:
cabin/outdoorvillage
skatepark
ball pit
corn fieldIgnore
, 0 , 0Node 4 Node 5 , 0 , 0
Node 6 Node 7
tree farmNegative: Positive:
corridor
game room
Ignore
Node 8
village
forest path
herb garden
wet bar
corridor
airplane_cabinNegative: Positive:
stable
barndoor
Ignore
Node 11
harborNegative: Positive:
medina
waterfall/fan
Ignore
Node 12
valleyNegative: Positive:
waterfall/fan
driveway
basement
Ignore
Node 15
orchard beach
villageNegative: Positive:
elevator/door
elevator/interior
Ignore
Node 17
landfill
Negative: Positive: Ignore
Node 22
campusNegative: Positive:
waiting room
locker room
Ignore
Node 25
house
airplane cabinNegative: Positive:
library/indoor
jail/indoor
Ignore
Node 30
veterinarians office
, 0
, 0
, 0 , 0
, 0
, 0
Node9
Node10
, 0
Node13
, 0
Node14
, 0 , 0
, 0 , 0
Node16
Node23
Node24
Node31
, 0, 0, 0 , 0
Hierarchy Learned using GIST with RBF Kernel
hospital
courthouse hospital room
staircase
veterinarians_office
Figure 2. The first five levels of the learned hierarchy using GIST with RBF kernel on the SUN dataset.

Node 2, 0 , 0
Node 1
botanical_gardenNegative: Positive:
vineyard
beach
mosque/indoorcoast
synagogue/indoorIgnore :
barn living room
Negative: Positive:
forest_pathcottage_garden
swamp
garbage_dump
landfill
art_studio
art_schoolIgnore :
alley
church/outdoorauditorium biological_lab dorm_room game_room
suchi_bar bathroom bedroom
market/indoor
lobby
nursery
cottage_garden factory/indoor
tennis_court/indoor
bazaar/indoor
Node 3
aqueductNegative: Positive:
mountain_snowychurch/outdoor
airplane_cabin
diner/indoorcoffee_shop
officeIgnore :
ski_resort
lighthouse
tree_house
forest_pathNegative: Positive:
baseball_fieldIgnore
tree_house
Forest_broadleaf
Negative: Positive:
Basketball_court/outdoor
barndoor
elevator/door
Ignore
dockNegative: Positive:
runway
classroom
cubicle/office
Ignore
airplane_cabinNegative: Positive:
car_interirorvan_interior
doorway/outdoor
phone_booth
limousine_interiorIgnore
, 0 , 0Node 4 Node 5 , 0 , 0
Node 6 Node 7
Negative: Positive:construction_site
Industrial_area
Ignore
Node 8
stadium/baseball
florist_shop/indoor
home_office
living_room
cliffNegative: Positive:
rainforest
factory/indoor
shopping_mall
Ignore
Node 11
track/outdoorNegative: Positive:
batters_box
golf_course
Ignore
Node 12
pharmacyNegative: Positive:
drugstore
cathedral/outdoor
kennel/outdoor
Ignore
Node 15
raceway
cemeteryNegative: Positive:
crosswalk
train railway
Ignore
Node 17
picnic area
hayfied
Negative: Positive: Ignore
Node 22
abbeyNegative: Positive:
elevator/interior
pulpit
Ignore
Node 25
church_outdoor
icebergNegative: Positive:
dining_room
dorm_room
Ignore
Node 30
general_store
, 0
, 0
, 0 , 0
, 0
, 0
Node9
Node10
, 0
Node13
, 0
Node14
, 0 , 0
, 0 , 0
Node16
Node23
Node24
Node31
, 0, 0, 0 , 0
sandbarvalley
beachyard
vegetable_garden
field/wild
art_studio
art school
cottage_garden
baseball_field
stadium/football
botanical_garden
Forest/needleleaft volcano
pulpit
synagogue/indoor
Ice_floe
Hierarchy Learned using HOG with Hist. Intersection Kernel
swamp
bamboo forest iceberg
ice floe
Figure 3. The first five levels of the learned hierarchy using spatial HOG with histogram intersection kernel on the SUN dataset.