Discrete model reference adaptive control with an augmented error signal
11
Automatica. Vol. 13. pp. 507 517. Pergamon Press, 1977. Printed in Great Britain Discrete Model Reference Adaptive Control with an Augmented Error Signal* TUDOR IONESCUt:~ and RICHARD MONOPOLI§ Using a Lyapunov based design for discrete single-input single-output plants, stable model reference adaptive control systems avoid the need for anticipative values of the plant output by using the augmented error concept and only plant input and output signals. Key Word Index--Adaptive control; (augmented error signal); discrete systems; Lyapunov methods; (model reference systems); nonlinear control systems; stability; system theory; time-varying systems. Summary--A method is developed for designing discrete model reference adaptive control systems when one has access to only the plant's input and output signals. Controllers for single-input, single-output, nonlinear, nonautonomous plants are developed via Lyapunov's second method. The augmented error signal method is employed to ensure that the normally used true error signal approaches zero asymptotically without requiring anti- cipative values of the plant output signal. Such anticipative signals are replaced by others easily obtained from low pass digital filters operating on the plant's input and output signals. INTRODUCTION THE AUGMENTED error signal method for con- tinuous model reference adaptive control systems introduced in [1] is used to solve the discrete model reference adaptive control problem. Extension of results presented in [2], and [-3] are given. Further detail on the results of this paper and related problems can be found in [4]. This paper is divided into three parts. In section I, the problem statement and the notation are given. Section II gives the main result. Simulation results are presented in section III. Proofs of lemmas and peripheral results are confined to the appendices. I. NOTATION AND PROBLEM STATEMENT A discrete time dynamic system (plant) can be described by the non-linear, nonautonomous differ- ence equation *Received 18 August 1975; revised 8 September 1976; revised 13 December 1976; revised 3 March 1977. The original version of this paper was presented at the 6th IFAC Congress on Control Technology in the Service of Man which was held in Boston, Cambridge, MA 02138, U.S.A. during August 1975. The published Proceedings of this IFAC Meeting may be ordered from: IAS, 400 Stanwix Street, Pittsburgh, PA 15222 or John Wiley, Baffins Lane, Chichester, Sussex, PO 19 IUD, UK. This paper was recom- mended for publication in revised form by associate editor I. Landau. tlntermetrics, 701 Concord Avenue, Cambridge, MA 02138, U.S.A. l-ormerly with the Department of Electrical and Computer Engineering, University of Massachusetts, Amherst, MA 01003, U.S.A. :Wormerly with the Department of Electrical and Computer Engineering, University of Massachusetts, Amherst, Massa- chusetts. §Department of Electrical and Computer Engineering, Uni- versity of Massachusetts, Amherst, MA 01003, U.S.A. x(k +n)+alX(k +n- 1)+... +a,x(k)--bou(k +m) +... + b,,u(k) + cf(X(k), k) (1.1) where u(k),x(k) are the plant input and output respectively, X(k) is the set of x(k+n-i) for i= 1, 2.... and f (X ( k ), k) is a nonlinear time varying function of known form. It is assumed that coefficients ai, bi and c are unknown and constant or slowly varying. The term cf(X(k), k) may be replaced by a sum of terms of the same type. There is no loss of generality in carrying only one term of this kind. It is also assumed that: (a) The function f(... ) satisfies the conditions necessary for solutions of (1.1) to exist and be unique, (b) all roots of the polynomial bo +blz -1 +...b,,z m, are in the unit circle, (c)+oo > b0M > bo > bo,, > 0, and boM and bo,, are known, (d) m < n- 1 and must be known. Assumption (b) is required to ensure a bounded control input by not requiring the adaptive system to act to cancel non minimum phase plant zeroes. For a similar reason u is not included inf In general, it is not known what restrictions to impose on these functions to ensure that u is bounded. The design objective is to have the plant output follow the output of a model reference defined by the equation: 507 xM(k +n)+adlxM(k +n - 1)+...+ad,xM(k) = Kor(k)+g(XM(k),r(k),k) (1.2) where the nth-degree polynomial in z with coeffi- cients ad,, i = 1 ..... n has roots inside the unit circle, xM(k) is the model output, r is the reference input, Ko is a known scalar X~(k) is the set of xM(k + n -- i) for i = 1, 2..... and g(,, ) is a nonlinear time varying function with the properties required for the existence and uniqueness of solutions to (1.2). The design problem is to synthesize a parameter adaptive control system for (1.1) which will cause
-
Upload
tudor-ionescu -
Category
Documents
-
view
214 -
download
3
Transcript of Discrete model reference adaptive control with an augmented error signal

Automatica. Vol. 13. pp. 507 517. Pergamon Press, 1977. Printed in Great Britain
Discrete Model Reference Adaptive Control with an Augmented Error Signal*
T U D O R IONESCUt:~ and RICHARD MONOPOLI§
Using a Lyapunov based design for discrete single-input single-output plants, stable model reference adaptive control systems avoid the need for anticipative values of the plant output by using the augmented error concept and only plant input and output signals.
Key Word Index--Adaptive control; (augmented error signal); discrete systems; Lyapunov methods; (model reference systems); nonlinear control systems; stability; system theory; time-varying systems.
Summary--A method is developed for designing discrete model reference adaptive control systems when one has access to only the plant's input and output signals. Controllers for single-input, single-output, nonlinear, nonautonomous plants are developed via Lyapunov's second method. The augmented error signal method is employed to ensure that the normally used true error signal approaches zero asymptotically without requiring anti- cipative values of the plant output signal. Such anticipative signals are replaced by others easily obtained from low pass digital filters operating on the plant's input and output signals.
INTRODUCTION
THE AUGMENTED error signal method for con- tinuous model reference adaptive control systems introduced in [1] is used to solve the discrete model reference adaptive control problem. Extension of results presented in [2], and [-3] are given. Further detail on the results of this paper and related problems can be found in [4]. This paper is divided into three parts. In section I, the problem statement and the notation are given. Section II gives the main result. Simulation results are presented in section III. Proofs of lemmas and peripheral results are confined to the appendices.
I. NOTATION AND PROBLEM STATEMENT
A discrete time dynamic system (plant) can be described by the non-linear, nonautonomous differ- ence equation
*Received 18 August 1975; revised 8 September 1976; revised 13 December 1976; revised 3 March 1977. The original version of this paper was presented at the 6th IFAC Congress on Control Technology in the Service of Man which was held in Boston,
Cambridge, MA 02138, U.S.A. during August 1975. The published Proceedings of this IFAC Meeting may be ordered from: IAS, 400 Stanwix Street, Pittsburgh, PA 15222 or John Wiley, Baffins Lane, Chichester, Sussex, PO 19 IUD, UK. This paper was recom- mended for publication in revised form by associate editor I. Landau.
tlntermetrics, 701 Concord Avenue, Cambridge, MA 02138, U.S.A. l-ormerly with the Department of Electrical and Computer Engineering, University of Massachusetts, Amherst, MA 01003, U.S.A.
:Wormerly with the Department of Electrical and Computer Engineering, University of Massachusetts, Amherst, Massa- chusetts.
§Department of Electrical and Computer Engineering, Uni- versity of Massachusetts, Amherst, MA 01003, U.S.A.
x(k +n)+alX(k + n - 1)+... +a,x(k)--bou(k +m)
+... + b,,u(k) + cf(X(k), k) (1.1)
where u(k),x(k) are the plant input and output respectively, X(k) is the set of x ( k + n - i ) for i= 1, 2 .... and f (X ( k ), k) is a nonlinear time varying function of known form. It is assumed that coefficients ai, bi and c are unknown and constant or slowly varying.
The term cf(X(k), k) may be replaced by a sum of terms of the same type. There is no loss of generality in carrying only one term of this kind. It is also assumed that: (a) The function f ( . . . ) satisfies the conditions necessary for solutions of (1.1) to exist and be unique, (b) all roots of the polynomial bo +blz -1 +.. .b, ,z m, are in the unit circle, (c)+oo > b0M > bo > bo,, > 0, and boM and bo,, are known, (d) m < n - 1 and must be known. Assumption (b) is required to ensure a bounded control input by not requiring the adaptive system to act to cancel non minimum phase plant zeroes. For a similar reason u is not included i n f In general, it is not known what restrictions to impose on these functions to ensure that u is bounded. The design objective is to have the plant output follow the output of a model reference defined by the equation:
507
xM(k +n)+adlxM(k +n - 1)+. . .+ad,xM(k)
= Kor(k)+g(XM(k),r(k),k) (1.2)
where the nth-degree polynomial in z with coeffi- cients ad,, i = 1 ..... n has roots inside the unit circle, xM(k) is the model output, r is the reference input, Ko is a known scalar X~(k) is the set of xM(k + n -- i) for i = 1, 2 .. . . . and g( , , ) is a nonlinear time varying function with the properties required for the existence and uniqueness of solutions to (1.2). The design problem is to synthesize a parameter adaptive control system for (1.1) which will cause

508 TtJDOR IONESCU and RICHARD MONOPOLI
the error e ( k ) = x M ( k ) - x ( k } , between the plant and model outputs to approach zero. As previously ment ioned the special feature of this work is that anticipative values of the plant output x do not appea r in the design, i.e. if the adap ta t ion takes place at t ime k, then x ( k + j ) , j = 1,2 . . . . do not appear in the a lgor i thms for the adapt ive gains or the controls.
It is convenient at this stage to introduce the delay opera to r z m, and the following polynomial delay opera tors :
Zp(n)= 1 + aiz ' i 1
Zu(rtl):bo+ ~ bi 2-i (*) i - I
ZM(n)= 1 + ~ ady i i - 1
Using (*) in (1.l) and (1.2) one has
Zp(n)x(k +n)=Z, (m)u(k + m ) + c f (k) (1.1")
ZM(n)xM(k+n)=Kor(k)+g(k) (1.2")
The concept of augmented error signal detailed in [1] must be in t roduced to achieve the design objective. Let t/(k) be the augmented error signal:
tl(k)=e(k)+ ),(k) (1.3)
where the signal y(k) is the output of the error augmenta t ion filter defined by:
Z w(n)y(k+n)=Z, , . (n- 1 ) ( w ( k + n - 1 )+q(k+n))
(1.4)
where Zw(n - 1 ) = ~ ' £ ~ ciz -i and w(k ) and q(k ) are auxiliary system inputs to be determined along with the control input u(k) as par t of the design. The coefficients c / m u s t be chosen in a special way, the details of which will be explained later in the development . It is noted here that the roots of Z,,. (n - 1 ) will be inside the unit circle
ZM (n)e(k + n)=Kor(k) + g ( k ) - Z,(m)u(k + m)
- q f (k)+ Z a ( n - 1)x(k + n - 1)
(1.5)
n
Z A ( n - - 1 ) ~ ~ Aaiz (i-1),Aai=ai-adl i - 1
where
for i = 1 . . . . . n.
Next (1.4) is added to (I .5) to obtain
ZM(n)rl(k + n ) = K o r ( k l + g ( k ) - Z , ( m ) u ( k ~-m)
+ Z a ( n - 1)x(k + n - 1 ) - q l ( k )
+ Z w i n - 1)(w(k + n - l ) + q ( k - + n ) )
~1.6)
Equat ion (1.6) is the start ing point for the synthesis. The design p rob lem is to generate u(k), w(k) and q(k), all independent of x ( k + j ) , j = 1,2 . . . . . and in such a way that e(k)~O as k--, oc.
State variable filters must be introduced to avoid anticipative values of x. These play the role of an observer of sorts. However , knowledge of plant parameters is not required to design the state variable filters as it would be to design an observer. Also, a l though an est imate of the state is not obtained, it is not required. Par t of the required filtering is defined in terms of filter output signals x i, i = O, 1 ..... 4 as follows
Z ~ ( n - l ) x ° ( k + n - 1 ) = u ( k + m )
Z ~ , l n - 1 ) x I ( k + n - 1 ) = r ( k )
Z , ~ ( n - t ) x 2 ( k + n - 1 ) = x ( k - 1)
Zw(n - 1 )x 3 (k + n - 1 ) = f ( k )
Zw(n - 1 )x4(k + n - 11 = g(k) (1.7t
Using (1.7). one can write (1.6) as
ZM(nkl(k + n ) = Z w ( n - 1)EKoxt(k +n - 1)
- Z,(m)x°(k + n - 1 )
+ ZA(n- 1)x2(k + 2n - 1)
- c x 3 ( k + n - 1)+ x4(k +n - 1)
+ w ( k + n - 1 ) + q ( k + n ) ] (t.8)
The addit ional filtering required is defined in terms of signals x s and u s which satisfy
Z f ( n - m - 1)xS(k +n - m - 1)
= ( l + F l Z - l + F 2 z 2 + . . .
+F,_ m_lz -(n " - l ) ) x f ( k + n - m - l )
= x ( k ) Z s ( n - m - 1 ) u f (k + n - m - 1 ) =u(k) (1.9)
where constants F i are such that the polynomial Z s ( n - m - 1 ) has all its roots inside the unit circle. No te that this filtering is not required if m = n - 1. This is a special case for which Zr = 1, xS(k)=x(k) , and uS(k) = u(k ).

Discrete model reference adaptive control with an augmented error signal 509
The following lemmas, proved in Appendix A, are used to prove the main result.
Lemma 1.1 There exist constants A o through A,_ 2 such that
Zu (m)x ° ( k + n - 1 ) = (bo/co)u f ( k + n - 1 )
n-2 + ~, A i z - ~ i + l ) Z f l ( n - m - 1 ) x ° ( k + n - 1 )
i = 0
(1.10)
Lemma 1.2 There exists constants Bo through B,-1, Co
through C._ 2, and Do through D,-m-2 such that
n - 1
Z a ( n - 1 ) x 2 ( k + 2 n - 1 ) = Z Biz-~"- ' - l+i)z~ 1 i = 0
× ( n - m - 1 ) x 2 ( k + 2 n - l ) 4 - U ( n , m )
- n - 2
X E Ciz-( i+l)zf I(H i=o - m - l )
× x ° ( k + n - l ) n-m-2
4- E Di 2-(i+1) i = 0
Z - l ( n - m - 1)cx3(k × f
+n-l)] where U(n, m)= 1 for m =< n - 2 and zero otherwise.
It is important to note that these constants cannot be calculated since they are functions of the unknown plant parameters. They do not have to be calculated, however, since only the fact that they exist is used in the development to follow.
If the right sides of (1.10) and (1.11) are used in (1.8) to replace Z, (n)x°(k+n - 1) and Z a ( n - 1 ) x 2 (k + 2n - 1 ) respectively, the result is
V ZM(n)tl(k +n)= Zw(n-- 1)lbo/couI(k + n - 1)
i._
+ w ( k + n - 1 )
N-1 1 + ~ f l i (9i(k+n-1) +q(k+n) i = 0
(1.12) where N = 3 n - m + 1,
flo =Ko, f l l = - - C,
fie = 1, (9°(k + n - 1) = x l ( k + n - 1),
(9 l(k + n - 1)=x3(k +n - 1),
( 9 2 ( k + n - 1 ) = x 4 ( k + n - 1 ) ; for i=3 ,4 . . . . n + l ,
f l i=U(n,m)Ci_3-Ai_3 and
(9i( k + n - 1 ) = z - ~ i - 2~Z~ X ( n - m - 1)x° ( k + n - 1);
for i = n + 2 . . . . 2n+l,f l i=Bi_l,+2 ,
and Oi(k+n - 1)=z -~i m-a)z f 1 (n - m - 1 )
x Z£ l ( n - 1 ) x ( k + n - 1);
for i=2n+2 ... . 3 n - m ,
fli=U(n,m)cDi_t2,+ 2), and
(9i(k-4- n - 1) = U(n, m)z -¢i- 2n- l ) z f 1
× ( n - m - 1)xa(k+n-1) .
The equation to be used later for deriving u(k) and w(k) is
uf (k+n - 1)+w l ( k + n - 1)
N - 1
= ~ K i ( k + n - 1 ) ( 9 i ( k + n - 1 ) (1.13) i - 0
where w(k)=KN(k)wl(k) and Ki(k) for i = 0 to N are the adaptive gains. Substituting (1.13) into (1.12) yields
ZM(n)rl(k + n) = Zw(n -- 1 )
(i=~ ° b i ( k + n - 1 ) ( g i ( k + n - l ) + q ( k + n ) )
(1.14) where
6i(k)= -(bo/co)Ki(k)+fii for i = 0 ..... N - 1 , 6N(k)
=KN ( k ) 4- bo/ c o, and (9N( k ) = w 1 ( k ).
Before developing the complete solution to the nonlinear problem, it is useful to consider the application of the results developed thus far to the design for a linear time invariant system with known coefficients. This gives an appreciation of the basic structure of the adaptive system, and some insight into the role of the state variable filters. The linear, time invariant, known parameter problem is speci- fied by letting g = 0 in (1.2), c = 0 in (1.1) and assuming that coefficients ai and bl in (1.1) are known. For this problem, there is no need to adjust the gains Ki(k), therefore they are taken to be constants. Also, the auxiliary signals w(k) and q(k) may be taken to be zero in this case. Then, for these conditions, one has to show that constant gains K ~ can be found such that for u(k) given by
2 n + l
u(k)= ~ K i Z I ( n - m - 1 ) ( 9 i ( k + n - m - 1 ) i = 0
i~1,2 (1.15)
the plant transfer function X {Z }/R {Z) is equal to the model transfer function xM{Z)/R(Z). Equation (1.15} is derived by applying the operator Zf to both sides of(1.13) and using (1.9). The proof of this result is given in Appendix B. Figure 1 shows the resulti,ag system for this linear, time invariant known para- meter case.

510 TUDOR I()NES('ti and RICHARD MON()I>OLI
R(z) : _ ~ U(z)
n¢L
, = 3
z,,
Z n * l
~. K ;Z In+2 ; I
, ; n+2
Zw
~. ] x<z ) D- 2o ]
F~c; 1. System configuration for special case.
11. THE MAIN RESULT Returning to the main problem, we put (1.14) in
the matrix vector form
( k ) q ( k + l ) = A q ( k ) + d 6 ' ( k ) O ; ( k ) + q ( k + l ) i
(2.1)
where
ql ( k ) = q ( k ) = e ( k ) + y ( k ) . and
I -aa~ 1 0 . . . 0-~
A-~-l--(.gd2__adn 00 1 ...... 0 : dT = [CO' C I 0 ..... Cn-l]
The main result is
Theorem 1
There exists scalars c/, i = 0,..., n - 1 such that the following conditions are satisfied : (i) Zw(n - 1 ) has all its roots inside the unit circle.
(ii) For each Kq>O and for )~imin> I(2Kq) -1, the adaptive laws
Co K i ( k ) - K i ( k - 1 ) = 2 ~ ° t/1 ( k ) ~ i ( k - 1)
i=O . . . . N - 1 (22)
1 K S ( k ) - K N ( k - 1)= - - ~ q l (k )OS( k - 1 )
AN
where
"~imin = min (20 for i=0, 1 . . . . N and the auxiliary control:
N q(k)= -Kqr/(k) ~-~ (qSi(k- 1)) 2 (2.3)
i=0
yield lim tt(k)=O k ~ y
Proof The proof requires the following two lemmas
which are proven in Appendix C. Let
~ ( z ) = z " + a l z " l + . . . + a , (2.4t
be a polynomial with real coefficients. Define the scalars'
a, k-]:k= 0 ..... n - - l ' a o = l ( 2 . 5 ) ~k=det [L , ak ~
Let
7z'(z)=':%z"-l+:q z"-2 + . . . + e , - I (2.6)
Lemma 2.1
If ~z(z) has all its roots inside the unit circle then r((z) also has its roots inside the unit circle.
The next lemma deals with a particular solution of the Lyapunov matrix equation for discrete systems. Let A and Ac denote
A =
-a• 1 0 ... 01 - a 2 0 1 . . . 0 ,
k - a . 0 ... 0 I
A, =
0 1 0 . . . 0
0 0 l 0 .. 0
0
- - ~l n - - a n - 1 . . . . . - - ( a l l _
(2.71
Lemma 2.2 If A has all its eigenvalues in the unit circle then
there exist positive semi-definite matrices R T = R, QT = Q and a positive definite matrix Po v = Po = [Pij]

Discrete model reference adaptive control with an augmented error signal 511
such that
(i) AV~PoA~-Po = - R
and the polynomials
A(z) = p..z ~- 1 +. . . + p2,z + Pl,
A'(z) =pl l z " - 1 +. . . +Pl(n- l ) z+Pl ,
(2.8) - d T p o ~ d 6 i ( k -1 )c~ i ( k -1 )
i
+q(k) ) 2
N
+ ~ ,~,i(6i(k)-fi(k - 1))(hi(k) i = O
+ h i ( k - l ) ) (2.12)
have all their roots inside the unit circle. From (2.2) we get
(ii) ATPo 1A - - Po 1 = _ Q
We now turn to the proof of the main result. First note that A in (2.1) is of the form in (2.7) and is stable by assumption. Now choose the scalars czi= 0,..., n - 1, such that
tiT=[1 0 ... 0] Po (2.9)
where Po is given by lemma 2.2. This choice of c, implies that Z w ( n - 1 ) has its
roots inside the unit circle. Next consider the following Lyapunov function candidate
V (k)= Ir/x (k)-dT(i~= ° fi~(k- 1 )q~(k-1 ) + q ( k ) ) l
x P o ~ t / ( k ) - d 6~(k- 1)~b'(k- 1) i
+q(k) + ~ X:~;~(k-1) (2.10t i = 0
Then
V(k + 1 ) - V(k) = ~tT(k)(ATp o X A - Pot )rl (k)
N
+2dTPoXq(k) ~ 6 ' ( k - 1 ) # ( k - 1) i = 0
+ 2d~ Po ~ ~l(k)q(k)
- d T p o Xd (~ b / (k- 1 ) ¢ ' ( k - 1) + q(k)) 2
N
+ 2 2i ( (~i (k) -6i (k- 1))((~i(k)+6i(k- 1)) i = 0
(2.11)
From lemma 2.2 and (2.9) it follows that
V(k + 1 ) - V(k) = -nT(k )Qq(k ) + 2t h (k)
N
x ~ b i (k -1)ch~(k-1) i = 0
+2qs(k)q(k)
1 6 ' ( k ) - 6 ' ( k - 1 ) = - ~ t h ( k ) d p i ( k - 1 ) ; i = O . . . . ,N
(2.13)
If 261(k-1) is added to both sides of (2.13) one obtains
6'(k) + 6~(k- 1) = 26 i ( k - 1 ) - ~ r h (k )Oi (k - 1);
i = 0 ..... N (2.14)
Substituting (2.13) and (2.14) into (2.12) one has
V ( k + 1 ) - V ( k ) ~ -aOmmll~(k)ll2-d T eo Xd
N 2
N 1 2 y~ 7q~, (k- ll+2,h(k)q(kl i = 0 ~ i
(2.15)
From (3.2) and the assumptions it follows that V(k + 1 ) - V (k) < 0 for q (k) @ 0. Therefore, since V (k) is positive definite, we have by the Lyapunov theorem that limk, ~ q(k)=0. This ends the proof of the theorem. Q.E.D.
Remarks (a) Theorem 1 represents the discrete analog of
the results in [1]. (b) Lemmas 2.1 and 2.2 are of independent
interest and might be regarded as corollaries to the well known Jury stability criteria.
(c) The apparent loop implied by (1.3), (1.4) and (2.3) may be resolved as follows:
Substitute (2.3) into (1.4) and use (1.3) to get
ZM(n)y(k + n) = Zw(n - 1 )(w(k + n - 1 )
where
- ( e ( k + n ) + y ( k + n ) ) m E ( k + n - 1))
N
m2(k+n - 1)=K~Z (q~i(k + n - 1)) a. 0
(R-l)

512 Tt:D()R ]()N['S('t' and RICHARD M()NOPOII
Let
Z M ( n ) = I + z *Z~(n-- l ) .
where
Z~ln-1)= ~, adi2 li 11 i=1
and
Z. , (n- 1 )=co + z - x Z . , ( n - 2 ) ,
where n l
Z w ( n - 2 ) = Y~ ciz i=l
(i 11
Then (R-I)may be written as
(i +Co m 2 ( k + n - 1 ) )y (k+n)= - - (ZM(n- -1 )
+ Z w ( n - 2 ) m Z ( k +n - 1 ) ) y ( k + n - 1)
+ Z,~, (n - 1 ) ( w ( k + n - 1 ) - m 2 ( k + n - 1 ) e ( k + n ) )
(R-2)
Using (R-2). the algorithm for y(k) becomes
y(k) = (1 ÷ com2(k - 1 ))- l( _ (ZM( n _ 1 )
+ Zw(n - 2)m 2 (k - l ))y(k - i )
+ Z w ( n - 1 ) (w(k- 1 ) - m2(k - 1 )e(k))) (R-3)
Thus, for implementation, (R-3) is used to generate y (k ) and (1.3) to generate ~/(k). Since y(k) and r/(k) depend directly on e(k), it must be assumed that the total time taken for the required multiplication in (R-3) and the required addition in (1.3) is negligible relative to the time interval between k and k + 1.
In order to complete the design, the control signal u (k) and the auxiliary control w (k) must be specified in a way which insures that ~/(k)--+0 implies that e( k )-+O.
Let Kqk) and q(k) be given by Theorem 1. Then e ( k ) + 0 i f
N - 1
u(k)= ~, Ki(k - 1 ) Z r ( n - m - 1)qSi(k+n-m - 1) i=0
(2.16)
and N - l
w l ( k ) = 2 K i ( k ) ( b i ( k ) - u f ( k ) (2.17) i=o
Proof First note that (2.16) and (2.17) satisfy (1.13).
Furthermore, anticipative values of the plant output
are not required to generate either u(k or w(k) Now, using (l.9)in (2.17) one has
w l ( k ) = 2 Ki(k ) ( / / ( k ) o
Z ) : l ( n - m - I . , u(k t
t2.17')
Substituting (2.16)into (2,17't gives
N 1
}{'l(k)~--- ~, (Ki(k)~i(k)--Z.f l(H--nl-- I l K i 0
w × ( k - n + m ) Z r ( n - m - 1)~ i ( k ) )
(2.17"}
Since rl(k)--+O assures Ki(k) approaches constant (from (2.2)), then
K i ( k ) - K i ( k - 1)~0 as k--, ~.
Hence, from (2.17"), wl (k ) (and w(k) also) ap- proaches zero as k-+~:. Since q(k) and w(k) approach zero as q(k) approaches zero, then so does y ( k ) , a n d a l s o e ( k ) . Q.E.D.
1 his prool relies oil the assumption that signats (hi(k) are bounded for all i and k. Such an assumption is also required in Ell, but is not explicitly stated there. This assumption was made in all simulations run by the authors, and no dilficul- ties were encountered, i.e. these signals did remain bounded yielding the desired result, e(k)---,0. One such simulation is given in the next section.
An algorithm that does not require the bounded- ness assumption for q~q,k)is given next. It is somewhat more complicated than that above and has not been tested by simulation. Basically, it requires a decreasing gain in the adaptive algor- ithms (2.2) as
3, ( ( h i ( k - 1 )) 2
i=: l)
increases. For this case, u{k) and w 1 (k) are still as given by (2. l 6) and {2.17) respectively. However, (2.2) and (2.3) must be modified as follows
Kqk)-Kqk- l)=fS' U,,{kl~?,(k)eqk-l)
lor i = 0 ..... N - I {2.2')
1 K h r ( k ) - K : V { k - 1 ) = - - - Kl,.(k)~ h (k)qSi(k - 1 )
where
Kt,-(k)=K k K k + ~ (4)i(k - 1 ))2 i = 0

Discrete model reference adaptive control with an augmented error signal 5 l 3
and Kk is a positive constant Filtered variables required are defined by
where
q( k ) = - K o ( k )tlx (k ) (2.3')
K¢2(k)=Kq( Kk +i~o (~bi(k- 1 ))2)
and K. is a positive constant. It is shown in Appendix D that the modified
algorithm as given by (2.2') and {2.3') does insure that e(k)--+O without the a priori assumption that ~bi(k) are bounded for all i and k. Conditions forKq andK k are also given there.
111. S I M U L A T I O N RESULTS
Digital computer simulations were performed for an inherently discrete second order plant described by
x(k + 2)+alX(k + l )+a2x(k)=bou(k ) (3.1)
Zwx°(k + 1) =cox°(k + 1 ) + q x ° ( k ) = u(k)
Zwx 1 (k + 1) = r(k)
ZwX2(k+ 1 ) = x ( k - 1) (3.4)
ZyxY(k + 1)= (1 + F l z - 1 )X f( k _~_ 1 ) = x ( k )
Z ruY(k + 1) = u(k)
where F1 = 0 . 5 .
The gain a d j u s t m e n t a l g o r i t h m s for this e x a m p l e are
K ° (k) = K ° (k - 1 ) + A ° t l ( k ) O ° (k - 1 )
K 3 (k) =K 3 (k - 1 ) + A3r/(k)q~ 3 (k - 1 )
K * ( k ) = K 4 ( k - 1 ) + A 4 t l ( k ) O 4 ( k - 1 ) (3.4)
g 5 (k) = K 5 (k - 1 ) + Ast/(k)q~5 (k - 1 )
K 7 (k) =K 7 (k - 1 ) + Avt/ (kkb 7 (k - 1 )
3 - - • M ^ -'__Z ;,';'
- 3 - - • •
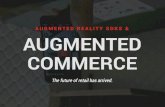
F1G. 2. Simulation results.
The model used was
x M (k + 2) + adlxM(k + 1) + ad2X(k) =Kor(k) (3.2)
where
ad, = 0.5, an2 = 0.6 and Ko - 2.0.
The augmenting variable v is defined by
y(k + 2) + ady(k + 1 ) + ad2y(k) = CoW(k + 1)
+ clw(k) + coq(k + 2) + caq(k + 1)
where
Co =0.64 and cl =0.2.
(3.3)
where A i =Co/(2ibo) and q9 are as defined in (1.12}- (1.14).
The control input u(k) and the auxiliary input w(k) were generated according to (2.16) and (2.17) and the definition below (1.13). The second auxi- liary input q(k) was generated according to Theo- rem 1 with Kq = 1/2~ml,.
In Fig. 2, xU(k) and e(k) are plotted for k = 0 to 36. For this experiment r (k )= +1 for 0 < k < 1 0 , r(k) = - 1 for 11 _< k < 20, etc. The plant parameters were a 1 =a2 =0.2, and bo = 1. K°(0), K3(0), K4(O), and Ks(0) were calculated assuming plant para- meters were those of the model, and K 7 (0) =Ko/c O. The values used for A i ( i=0,3,4,5,7) were all one, and Kq = 2/0.64.
The error is initially reduced, becomes large again after the first time r(k) changes sign, and then quickly decays, remaining small thereafter. The

514 T I I D ( ) R IONESCII a n d RICHARI) M t ) N O P O I . I
adaptive gains K " , K ~ and K: converged to their correct values but not K '~ a n d K s . This is un- important, however, since control is the objective. If a suitably exciting input were used, these gains would converge to correct values. Attempts to increase the speed of convergence by increasing the gains A ~ did not work well. With A~= 10 rather than one, the error response up to k = 15 was essentially the same except that the error peak at k = 12 was reduced t o - 0 . 6 5 . After k =20, these higher gains did keep the error approximately an order of magnitude smaller than the lower gains. By that time, however, the error is already quite small. Experi- mentation with different values of F~ led to no conclusive results. Different weightings of e(k)in the definition of r/(k) were also tried, again with inconclusive results.
IV. C O N C L U S I O N
A new method for designing discrete model reference adaptive control systems has been pre- sented. Through the use of auxiliary inputs for control purposes, the gains in the adaptive loops are not constrained as in other methods for discrete designs. Simulation results show the method to work quite well. The advantages of the method are that no anticipative values of the plant output are required, and that convergence to zero of the error between plant and model is assured. Further research is needed with this method in order to minimize the convergence time and to determine its immunity to measurement noise.
Acknowledgements--This research was supported partially by grant number NGR 22010018 from the National Aeronautics and Space Administration, and by grant number NSF ENG 74 03399 from the National Science Foundation. The helpful comments of the reviewers are gratefully acknowledged, as is the assistance of Mr. Mario Troiani in performing the simulations, and carefully reading the manuscript.
REFERENCES
[1] R. V. MONOPOLI: Model reference adaptive control with augmented error signal. IEEE-TAC AC-19, (5) 474-484 Oct. (1974).
[2] T. IONESCU and R. V. MONOPOH: Discrete model reference adaptive control for single input-single output plants. Milwaukee Symposium on Control and Computer Engineer- ing, April (1975).
[3] T. IONESCU and R. V. MONOPOH: Discrete model reference adaptive control with an augmented error signal. Preprints IF AC 6th World Congress, Part 1D, August (1975).
[4] T. 1ONESCU : Linear and nonlinear adaptive discrete systems. Ph.D. Dissertation, Electrical and Computer Engineering Department, University of Massachusetts, May (1976).
[5] B.C. K u o : Analysis and Synthesis of Sampled Data Control Systems, pp. 156-- 157. Prentice-Hall, New York (19631.
[6] I. G. SARMA and M. A. PAl: A note on the Lyapunov matrix equation for discrete systems. IEEE-TAC AC-13, (1) 119 t21, Feb. (1968).
APPENDIX A
Proofs of lemmas 1.1 and 1.2 are contained in this Appendix
Proo/ ol lemma 1.1 One has Io determine A~, i = 0 . . . . . n 2 from the identity
ZiZ=b(~Z~r+[Aoz *+AIz 2 + . . . + A n 2z I n I)](A_I) C O
This is possible since both sides are polynomials of the same order in z ~ and the free term in both is bo.
Now multiplying both sides of (A-1) by Z} 1 applying both sides to x ° (k + n - 1), and replacing Zw(n- 1 )x°(k + n - 1) by u(k+ml, onegets(l.lO). Q.E.D.
Prool'qlLemma 1.2
Clearly, from (1.7)
x2{k+2n - 1 )=Z , , I [n - l }x(k + n - 1)
x°(k + n - 1 )= Z~I t (n - 1)u(k+m)
x3(k + n - I )=Z~ ~(n- I ~(k) (A-2)
Thus (1.11 ) is equivalent to
n I
Z a ( n _ l ) Z ~ t x ( k + n _ l ) = y~ Bi.z (n- m l+i)zf lz~ 0
× x ( k + n - 1 )
(; + Uln, m) Ciz ii+llZflZ~.lu(k+m) , i = 0
. , .-2 lj,(k)' ) + ~ Diz ti+l'ZllcZ~,, i = 0 /
Let Co .. . . . C, 2 be such that (A-4) is satisfied for m<n - 2
C n . tn 2 ) Co+Clz ~ +.. .+ -2-
=[Do+DIz l+.. .+D" m 2z I . . . . 21]Z,,(m }
(A-3)
(A-4)
These constants are undefined and not used for m > n - 2. It follows from (A-4) that (A-3) is equivalent to
n I
Z A ( n _ l l x ( k + n _ l ) = ~ Biz-(n ,,-i ~itZ~lx{k+n_l} i = 0
¢i m - 2
+U{n,m) ~ Diz-lZ~lZ,,x(k+n -1 ) (A-5) i = 0
Let B o . . . . . B, and D o . . . . . D,_,, 2 be such that (A-6) is satisfied :
n l
i = 0
n m 2
+U(n, nl) ~ Diz-iZp(n) (A-61 ~ = 0
Then relationships (A-5) and (A-3) are verified and ( 1.1 l ) follows. Q.E.D.
APPENDIX B
A SPECIAL CASE, LINEAR TIME INVARIANT K N O W N SYSTEMS
In this appendix, it is shown that constant gains K ~ can be found such that for u(k) given by (1.15), the plant transfer

D i s c r e t e m o d e l r e f e r e n c e a d a p t i v e c o n t r o l w i t h a n a u g m e n t e d e r r o r s i g n a l 51 5
function X(z) /R(z ) is equal to the model transfer function X~(z) /R(z) . With the definitions provided in Section I, (1.15) may be written as
n + l
u(k) = K ° Z f Z ~ lz " r (k )+ ~ Kiz-t i -2)Z~ lu(k) i = 3
2 n + 1
+ y~ K~z~"+2)-~Zwlx(k) (B-I) i = n + 2
Define 2 . and Zp by
Z. = (bo + bl z- l + . . . + b, ,z-")z" = Z .z"
2p = (1 + alz - 1 +. . . +a,z-")z" =Zpz" (B-2)
Then the plant equation can be written
Z p x ( k + n ) = 2 p x ( k ) = Z . u ( k + m ) = Z , ~ u ( k ) (B-3)
Let G~ (z~ ~ ) and G2(z- 11 be defined as
n ÷ l
G 1 = ~ K i z - t l -2 t
2 . + 1
G 2 = ~ Kiz(n+2 i)
i = n + 2
Then the closed loop plant transfer function X (z)/R (z) becomes
K°Zl .2 . z - " Gp - (Z~ - Gl )2~-- G22 ~ (B-4)
One now has to show that Gp as given in (B-4) is equal to
GM(z ) =XM(z)/R(z) =KoZ~Xz -" (B-5)
Here we are dealing with the case where 61(k)=0 for all i, i.e.
K ~ = cobo lfll, i = 0 .. . . . 2n + 1.
Now: Gp - GM =0 is equivalent to
K ° 2 . Z f Z M z " -" =Ko[(Z~ - G 1 )2p - G2 "2,] (B-6)
which in turn is equivalent to
;2.(K°ZyZMZ"-" +KoG2)=Ko22p(Z~-GI) (B-7)
From (B-2) and (B-7) it follows that
~ Z . ~" ~ K ° ( Z ~ - G 1 ) (B-8) 2p Zp K°ZyZMz ~- " +KoG 2
Claim. There exist A~, B~, C~, D~ such that lemmas 1.1 and 1.2 and equation (B-8) are satisfied.
Proof By definition
n + l
G 1 = ~ Kiz -(i-2} 3
where
K i = cobo lfl~ = cob~ 1 (U(n, m)C i_ 3 -- A i - 3 ),
i = 3 , . . . , n - - 1
. + 1
G1 = ~ K iz-ti-2) i = 3
=cobo U(n,m)Ciz -"+11- }~ Aiz li+ll i i = 0
Note that
and
n 2
Aiz- ,+ 11 = Z I Z " _boco IZw i = 0
n-2 n - m - 2
Z Ci Z - ( i + l ) = ~J~ i = 0 i = o
Di z-(i+ l)Zu = Z o Z u
f o r m < n - 2
Thus:
G1 =cob ° ll- (U (n, m)Z D - Z y )Z. + boco 1Zw]
Similarly
2 n + l 2 n + !
G2 = ~ Kizt.+2-i~=cobol ~ fllzt,+2 0 n + 2 n + 2
2 n + l
=cobo I ~ Bti- .-2)z ~+2-I~ n + 2
(B-9)
(B-10)
But from lemma 1.2 it follows that
Biz -i z -~n -ml=z - lZaZy_ ~ U(n,m)Diz-~i+l)Zp / o
~ ( Z f - U ( n , m ) Z D ) Z p - Z M Z f (B-11)
Using (B-11) in (B-10), it follows that
G2 =cobo az~"-")[(Zf - U(n, m)Zo)Z p - Z M Z f ] (B-12)
Plasing G1 from (B-9) and G 2 from (B-12) into (B-8) one has
Z~u , 2 - (n - m) =
Zp
Ko [ Zw - cobo 1 (U (n, m)Zo - Z I ) z . - Zw]
K ° Z IZM zl" - "t ) + Co bo i zt. -,,)Ko (Z f - U (n, m )Z o )Zp -cobo l zt"-")KoZMZ r
(B-13)
For 6 ° =0, K ° =Kocob o 1. Hence (B-13) becomes
Z , Kobo IZ, (Zy - U(n, m)Zo) Z . _ _ . Z-(n-m) -- Z -(n-m) Zp z~.-,.~Kobo l ( Z y - U(n, m)Zo)Z p Z~
(B-14)
which shows that Gp - GM = O. Q.E.D.
APPENDIX C
PROOFS OF LEMMAS 2.1 AND 2.2
Using lemmas 1.1 and 1.2 one has Proof for lemmas 2.1 and 2.2 are contained in this appendix.

5 1 6
f 'roo/'[i~r &,mm, 2 1
T U D O R I O N E S C / I a n d
Applying Jury 's stability test[5], to rclzj one has
ROW Z 0 Z' ~n" k .n 1
l a n an 1 , , . a k . , . a i
2 1 a a an k . . . an- l
3 bo bl . . . bk . . . h , _
4 b.._ 1 b n - 2 " ' " bn - k " ' " bn 1
5 C 1 C1 . . . . . . Cn 2
Cn 2 ('n 1 . . . . . . C(t
2 n
1
an
2,,_ 5 Po Pl P2
z , 4 P3 p2 P~
z , _ 3 qo qt q2
where ao = l,
, ck = det a , _ k J b,, t bk
qo de P° 3 q2 = d e t ~Po P l ] ( C - l )
LP3 P2
Since n ( z ) has no roots on or outside the unit circle the following inequalities are satisfied:
n ( 1 ) = a , + a , _ l + - . - + 1 > 0
> 0 neven r r ( - 1 ) = a " - a " - 1 + " ' + ( - 1)" < 0 n o d d
(C-2a)
(C-2b)
la,] < 1
Ibol>lb°-,I I%1>1c°-~1
IPo] >IP31
Iqol>lq2[ (C-3)
Applying the same test to g '(z) one has to show first that
[0( n iI <~0
l,lol>l.~l
(C-4)
R I C H A R D
where:
M O N O P O L I
Vo = det [ t/° kq3
~k J , k = 0 . . . . . t] 2 an L k
fin 2 k flk , k = O .. . . . n - 3
(C-5)
F r o m the assumpt ion and (C-4) it follows that
ek = - -bk k = 0 . . . . . n - 1
flk = - - G k = 0 . . . . . n - 2
"fk = d k :
qk =Pk k = 0 , . . . , 2
Vk =qk k = 0 . . . . . 2
Using (C-3) and (C-6) one has
]~.-,I = lb. , I < >01 = 1 - a," = a o (since la,l < 1)
I~ol = ICor > It._21 =1~.-21 11'01 =Idol >ld.-3l =1>'.-31
I%1-Iqol>lq21=lv21
(C-6)
Therefore the inequalities (C-4) are verified. It remains to show that (C-2a) and (C-2b) imply
> 0 n - 1 even n ' ( 1 ) > 0 and r t ' ( - 1 )
< 0 n - I odd
Indeed:
2 n ' { 1 ) = l - a , + ( l - a . ) ( l + a l + . . . + a , l
but from (C-2a)
l + a l + a 2 + . . . + a , , i > - [ l + a , , )
which replaced above gives ~z'( 1 ) > 0
If n - 1 is odd (n even)
7~( - 1)= 1 - a 1 +a2 - . . . - a , - 1 + a . > 0 (C-7)
r ( ( - 1 ) = ( 1 - a , ) ( a , - a - G 2 + . . . + a l ) - ( 1 - a , 2) (C-8)
Using (C-7) in (C-8) one obtains ~'( - 1) <0 . In a similar fashion it can be verified that g'( - 1) < 0 if n - 1 is
even.
Q.E.D.
P r o o J f o r l e m m a 2.2 Notice first that A c is a stable matrix since it has the same
eigenvalues as A. Moreover, for a stable companion matrix, from equations (2), (6) and (9) in [6] it follows that there exists a particular solution for (2.8), Po = [Pu], having the last column entries given by
Pi, = a ,_ ~ - a.ai, i = 1 . . . . . n ao = 1 (C-9)
Po is not only symmetric about the main diagonal but it is also symmetric about the cross diagonal, [6].
But from the definition of ~k one has Pi. = %-1 , i = t . . . . . n and by assumption z" + al z"- 1 + . . . + a, is a stable polynomial. Thus from lemma 2.1 A(z)_= rr'(z) has roots inside the unit circle. Since

Discrete model reference adaptive control with an augmented error signal 517
Po is symmetric about the cross diagonal as well, A(z)-=A'(z) thus concluding the proof of part (i).
Now (2.8) can be written as
,4~Pop~IpoA¢-Po = -R
or equivalently
pol/t~Po.PolPoA+Pot-Pol= -polRPo I (C.IO)
However, by direct computat ion using (2.7) and equation (6) in [6], one can verify that ~ P o = Po A~. Therefore (ii) is satisfied for Q=PoIRPo 1.
Q.E.D.
AP P E NDIX D
P R O O F OF C O N V E R G E N C E FOR M O D I F I E D A L G O R I T H M
Let lq (k) be given by
lq (k)= I~ (k)+e¢~C(k- 1 )M(k- 1)~O(k- 1)
where 1~ tk) is as i n (2.10)
~T(k)=[(i=~oi3i(k-1)dpi(k- 1 )),q(k)~,
(D-l)
e>O is a col+tst;.ii+t. ~nt+,.l Xl ( k J n,, the m+ttl tX
M l k ) = . K2A ~ (q~i(k_l))2; + i 2 ~ = 0 + 1 + 1 - K ~ 1 + . . . . . . . . . . .
KQ DKQ DK~
and D = dTP, 1 d > 0. It can be shown that M(k) is a positive definite matrix if
1 I K~K~> I ( ~ n +-D )" (D-2)
Using (2.2') and (2.Y). A 1,~ (k) = l/~ (/,- + 1 ) - 1:~ (k) satisfies
AI',(k)~-~Qm+nltl(k)i 2-(D-~:)Ox(k)M(k)O{k). (D-3)
Thus ife < D, AVI (k) is negative definite in r/(k),
and q (k). Consequently,
ii~l,i~O, qqh~-*O
and
~/Si(k)(o'th)---,O as k---, ~ . i = 0
These conclusions can be used to sho~ that ytkj--*O, and consequently that e(k)--*O. It is the authors ' contention that this modified algorithm insures that ~bi(k) are bounded for all i and k, but a detailed proof for this is not available at this time.