Dipartimento di Matematica Alma Mater Studiorum ...simoncin/numoc.pdf · Dipartimento di Matematica...
33
Order reduction numerical methods for the algebraic Riccati equation V. Simoncini Dipartimento di Matematica Alma Mater Studiorum - Universit` a di Bologna [email protected] 1
Transcript of Dipartimento di Matematica Alma Mater Studiorum ...simoncin/numoc.pdf · Dipartimento di Matematica...

Order reduction numerical methods for the
algebraic Riccati equation
V. Simoncini
Dipartimento di Matematica
Alma Mater Studiorum - Universita di Bologna
1

The problem
Find X ∈ Rn×n such that
AX+XA⊤ −XBB
⊤X+ C
⊤C = 0
with A ∈ Rn×n, B ∈ R
n×p, C ∈ Rs×n, p, s = O(1)
Rich literature on analysis, applications and numerics:
Lancaster-Rodman 1995, Bini-Iannazzo-Meini 2012, Mehrmann etal 2003 ...
We focus on the large scale case: n ≫ 1000
Different strategies
(Inexact) Kleinman iteration (Newton-type method)
Projection methods
Invariant subspace iteration
(Sparse) multilevel methods
....
2

The problem
Find X ∈ Rn×n such that
AX+XA⊤ −XBB
⊤X+ C
⊤C = 0
with A ∈ Rn×n, B ∈ R
n×p, C ∈ Rs×n, p, s = O(1)
Rich literature on analysis, applications and numerics:
Lancaster-Rodman 1995, Bini-Iannazzo-Meini 2012, Mehrmann etal 2003 ...
We focus on the large scale case: n ≫ 1000
Different strategies
• (Inexact) Kleinman iteration (Newton-type method)
• Projection methods
• Invariant subspace iteration
• (Sparse) multilevel methods
• ....
3

Newton-Kleinman iteration
Assume A stable. Compute sequence {Xk} with Xk →k→∞ X
(A−XkBB⊤)Xk+1 +Xk+1(A
⊤ −BB⊤Xk) + C
⊤C +XkBB
⊤Xk = 0
1: Given X0 ∈ Rn×n such that X0 = X⊤
0 , A⊤ −BB⊤X0 is stable
2: For k = 0, 1, . . . , until convergence
3: Set A⊤
k = A⊤ −BB⊤Xk
4: Set C⊤
k = [XkB, C⊤]
5: Solve AkXk+1 +Xk+1A⊤
k + C⊤
k Ck = 0
Critical issues:
The full matrix Xk cannot be stored (sparse or low-rank approx)
Need a computable stopping criterion
Each iteration k requires the solution of the Lyapunov equation:
(Benner, Feitzinger, Hylla, Saak, Sachs, ...)
4

Newton-Kleinman iteration
Assume A stable. Compute sequence {Xk} with Xk →k→∞ X
(A−XkBB⊤)Xk+1 +Xk+1(A
⊤ −BB⊤Xk) + C
⊤C +XkBB
⊤Xk = 0
1: Given X0 ∈ Rn×n such that X0 = X⊤
0 , A⊤ −BB⊤X0 is stable
2: For k = 0, 1, . . . , until convergence
3: Set A⊤
k = A⊤ −BB⊤Xk
4: Set C⊤
k = [XkB, C⊤]
5: Solve AkXk+1 +Xk+1A⊤
k + C⊤
k Ck = 0
Critical issues:
The full matrix Xk cannot be stored (sparse or low-rank approx)
Need a computable stopping criterion
Each iteration k requires the solution of the Lyapunov equation:
(Benner, Feitzinger, Hylla, Saak, Sachs, ...)
5

Newton-Kleinman iteration
Assume A stable. Compute sequence {Xk} with Xk →k→∞ X
(A−XkBB⊤)Xk+1 +Xk+1(A
⊤ −BB⊤Xk) + C
⊤C +XkBB
⊤Xk = 0
1: Given X0 ∈ Rn×n such that X0 = X⊤
0 , A⊤ −BB⊤X0 is stable.
2: For k = 0, 1, . . . , until convergence
3: Set A⊤
k = A⊤ −BB⊤Xk
4: Set C⊤
k = [XkB, C⊤]
5: Solve AkXk+1 +Xk+1A⊤
k + C⊤
k Ck = 0
Critical issues:
• The full matrix Xk cannot be stored (sparse or low-rank approx)
• Need a computable stopping criterion
• Each iteration k requires the solution of the Lyapunov equation
(Benner, Feitzinger, Hylla, Saak, Sachs, ...)
6

Galerkin projection method for the Riccati equation
Given the orth basis Vk for an approximation space, determine
Xk = VkYkV⊤
k
to the Riccati solution matrix by orthogonal projection:
Galerkin condition: Residual orthogonal to approximation space
V⊤
k (AXk +XkA⊤ −XkBB
⊤Xk + C
⊤C)Vk = 0
giving the reduced Riccati equation
(V ⊤
k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
Yk is the stabilizing solution (Heyouni-Jbilou 2009)
Key questions:
Which approximation space?
Is this meaningful from a Control Theory perspective?
7

Galerkin projection method for the Riccati equation
Given the orth basis Vk for an approximation space, determine
Xk = VkYkV⊤
k
to the Riccati solution matrix by orthogonal projection:
Galerkin condition: Residual orthogonal to approximation space
V⊤
k (AXk +XkA⊤ −XkBB
⊤Xk + C
⊤C)Vk = 0
giving the reduced Riccati equation
(V ⊤
k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
Yk is the stabilizing solution (Heyouni-Jbilou 2009)
Key questions:
Which approximation space?
Is this meaningful from a Control Theory perspective?
8

Galerkin projection method for the Riccati equation
Given the orth basis Vk for an approximation space, determine
Xk = VkYkV⊤
k
to the Riccati solution matrix by orthogonal projection:
Galerkin condition: Residual orthogonal to approximation space
V⊤
k (AXk +XkA⊤ −XkBB
⊤Xk + C
⊤C)Vk = 0
giving the reduced Riccati equation
(V ⊤
k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
Yk is the stabilizing solution (Heyouni-Jbilou 2009)
Key questions:
Which approximation space?
Is this meaningful from a Control Theory perspective?
9

Galerkin projection method for the Riccati equation
Given the orth basis Vk for an approximation space, determine
Xk = VkYkV⊤
k
to the Riccati solution matrix by orthogonal projection:
Galerkin condition: Residual orthogonal to approximation space
V⊤
k (AXk +XkA⊤ −XkBB
⊤Xk + C
⊤C)Vk = 0
giving the reduced Riccati equation
(V ⊤
k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
Yk is the stabilizing solution (Heyouni-Jbilou 2009)
Key questions:
• Which approximation space?
• Is this meaningful from a Control Theory perspective?
10

Dynamical systems and the Riccati equation
AX+XA⊤ −XBB⊤X+ C⊤C = 0
Time-invariant linear system
x(t) = Ax(t) +Bu(t), x(0) = x0
y(t) = Cx(t),
u(t) : control (input) vector; y(t) : output vector
x(t) : state vector; x0 : initial state
Minimization problem for a Cost functional: (simplified form)
infu
J (u, x0) J (u, x0) :=
∫ ∞
0
(x(t)⊤C⊤Cx(t) + u(t)⊤u(t))dt
11

Dynamical systems and the Riccati equation
AX+XA⊤ −XBB⊤X+ C⊤C = 0
Time-invariant linear system
x(t) = Ax(t) +Bu(t), x(0) = x0
y(t) = Cx(t),
u(t) : control (input) vector; y(t) : output vector
x(t) : state vector; x0 : initial state
Minimization problem for a Cost functional: (simplified form)
infu
J (u, x0) J (u, x0) :=
∫ ∞
0
(x(t)⊤C⊤Cx(t) + u(t)⊤u(t)
)dt
12

Dynamical systems and the Riccati equation
AX+XA⊤ −XBB⊤X+ C⊤C = 0
infu
J (u, x0) J (u, x0) :=
∫ ∞
0
(x(t)⊤C⊤Cx(t) + u(t)⊤u(t)
)dt
theorem Let the pair (A,B) be stabilizable and (C,A) observable.
Then there is a unique solution X ≥ 0 of the Riccati equation. More-
over,
i) For each x0 there is a unique optimal control, and it is given by
u∗(t) = −B⊤X exp((A−BB⊤
X)t)x0 for t ≥ 0
ii) J (u∗, x0) = x⊤0 Xx0 for all x0 ∈ Rn
see, e.g., Lancaster & Rodman, 1995
13

Order reduction of dynamical systems by projection
Let Vk ∈ Rn×dk have orthonormal columns, dk ≪ n
Let Tk = V ⊤k AVk, Bk = V ⊤
k B, C⊤k = V ⊤
k C⊤
Reduced order dynamical system:
˙x(t) = Tkx(t) +Bku(t), x(0) = x0 :=V ⊤k x0
y(t) = Ckx(t)
xk(t) = Vkx(t) ≈ x(t)
Typical frameworks:
• Transfer function approximation
• Model reduction
14

The role of the projected Riccati equation
Consider again the reduced Riccati equation:
(V ⊤k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
that is
TkY +YT⊤k −YBkB
⊤k Y + C⊤
k Ck = 0 (∗)
Theorem. Let the pair (Tk, Bk) be stabilizable and (Ck, Tk) observ-
able. Then there is a unique solution Yk ≥ 0 of (*) that for each x0
gives the feedback optimal control
u∗(t) = −B∗kYk exp((Tk −BkB
∗kYk)t)x0, t ≥ 0
for the reduced system.
If there exists a matrix K such that A−BK is passive, then the pair
(Tk, Bk) is stabilizable.
15

The role of the projected Riccati equation
Consider again the reduced Riccati equation:
(V ⊤k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
that is
TkY +YT⊤k −YBkB
⊤k Y + C⊤
k Ck = 0 (∗)
Theorem. Let the pair (Tk, Bk) be stabilizable and (Ck, Tk) observ-
able. Then there is a unique solution Yk ≥ 0 of (*) that for each x0
gives the feedback optimal control
u∗(t) = −B∗kYk exp((Tk −BkB
∗kYk)t)x0, t ≥ 0
for the reduced system.
If there exists a matrix K such that A−BK is passive, then the pair
(Tk, Bk) is stabilizable.
16

The role of the projected Riccati equation
Consider again the reduced Riccati equation:
(V ⊤k AVk)Y +Y(V ⊤
k A⊤Vk)−Y(V ⊤
k BB⊤Vk)Y + (V ⊤
k C⊤)(CVk) = 0
that is
TkY +YT⊤k −YBkB
⊤k Y + C⊤
k Ck = 0 (∗)
Theorem. Let the pair (Tk, Bk) be stabilizable and (Ck, Tk) observ-
able. Then there is a unique solution Yk ≥ 0 of (*) that for each x0
gives the feedback optimal control
u∗(t) = −B∗kYk exp((Tk −BkB
∗kYk)t)x0, t ≥ 0
for the reduced system.
♣ If there exists a matrix K such that A−BK is passive, then the
pair (Tk, Bk) is stabilizable.
17

Projected optimal control vs approximate control
⋆ Our projected optimal control function:
u∗(t) = −B⊤k Yk exp((Tk −BkB
⊤k Yk)t)x0, t ≥ 0
with Xk = VkYkV⊤k
⋆ Commonly used approximate control function:
If X is some approximation to X, then
u(t) := −B⊤Xx(t)
where x(t) := exp((A−BB⊤X)t)x0
u∗ 6= u
They induce different actions on the functional J , even for X = Xk
18

Projected optimal control vs approximate control
Xk = VkYkV⊤k
Residual matrix: Rk := AXk +XkA−XkBB⊤Xk + C⊤C
⋆ Projected optimal control function:
u∗(t) = −B⊤k Yk exp((Tk −BkB
⊤k Yk)t)
theorem. Assume that A − BB⊤Xk is stable and that u(t) :=
−B⊤Xkx(t) approx control. Then
|J (u, x0)− Jk(u∗, x0)| = Ek, with Ek ≤ ‖Rk‖2α
x⊤0 x0,
where α > 0 is such that ‖e(A−BB⊤Xk)t‖ ≤ e−αt for all t ≥ 0.
Note: |J (u, x0)− Jk(u∗, x0)| is nonzero for Rk 6= 0
19

On the choice of approximation space
Approximate solution Xk = VkYkV⊤
k , with
(V ⊤
k AVk)Yk +Yk(V⊤
k A⊤Vk)−Yk(V
⊤
k BB⊤Vk)Yk + (V ⊤
k C⊤)(CVk) = 0
Krylov-type subspaces: (extensively used in the linear case)
• Kk(A,C⊤) := Range([C⊤, AC⊤, . . . , Ak−1C⊤]) (Polynomial)
• EKk(A,C⊤) := Kk(A,C⊤) +Kk(A−1, A−1C⊤) (EKSM, Rational)
• RKk(A,C⊤, s) :=
Range([C⊤, (A− s2I)−1C⊤, . . . ,
k−1∏
j=1
(A− sj+1I)−1
C⊤])
(RKSM, Rational)
⋆ Matrix BB⊤ not involved
⋆ Parameters sj (adaptively) chosen in field of values of −A
20

On the choice of approximation space
Approximate solution Xk = VkYkV⊤
k , with
(V ⊤
k AVk)Yk +Yk(V⊤
k A⊤Vk)−Yk(V
⊤
k BB⊤Vk)Yk + (V ⊤
k C⊤)(CVk) = 0
Krylov-type subspaces: (extensively used in the linear case)
• Kk(A,C⊤) := Range([C⊤, AC⊤, . . . , Ak−1C⊤]) (Polynomial)
• EKk(A,C⊤) := Kk(A,C⊤) +Kk(A−1, A−1C⊤) (EKSM, Rational)
• RKk(A,C⊤, s) :=
Range([C⊤, (A− s2I)−1C⊤, . . . ,
k−1∏
j=1
(A− sj+1I)−1
C⊤])
(RKSM, Rational)
⋆ Matrix BB⊤ not involved (nonlinear term!)
⋆ Parameters sj (adaptively) chosen in field of values of −A
21

On the choice of approximation space
Approximate solution Xk = VkYkV⊤
k , with
(V ⊤
k AVk)Yk +Yk(V⊤
k A⊤Vk)−Yk(V
⊤
k BB⊤Vk)Yk + (V ⊤
k C⊤)(CVk) = 0
Krylov-type subspaces: (extensively used in the linear case)
• Kk(A,C⊤) := Range([C⊤, AC⊤, . . . , Ak−1C⊤]) (Polynomial)
• EKk(A,C⊤) := Kk(A,C⊤) +Kk(A−1, A−1C⊤) (EKSM, Rational)
• RKk(A,C⊤, s) :=
Range([C⊤, (A− s2I)−1C⊤, . . . ,
k−1∏
j=1
(A− sj+1I)−1
C⊤])
(RKSM, Rational)
⋆ Matrix BB⊤ not involved (nonlinear term!)
⋆ Parameters sj (adaptively) chosen in field of values of −A
22

Performance of solvers
Problem: A: 3D Laplace operator, B, C randn matrices, tol=10−8
(n, p, s) = (125000, 5, 5)
its inner its time space dim rank(Xf )
Newton X0 = 0 15 5, . . . , 5 808 100 95
GP-EKSM 20 531 200 105
GP-RKSM 25 524 125 105
(n, p, s) = (125000, 20, 20)
its inner its time space dim rank(Xf )
Newton X0 = 0 19 5, . . . , 5 2332 400 346
GP-EKSM 15 622 600 364
GP-RKSM 20 720 400 358
GP=Galerkin projection
(V.Simoncini & D.Szyld & M.Monsalve, 2014)
23

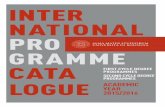
A numerical example on the role of BB⊤
Consider the 500× 500 Toeplitz matrix
A = toeplitz(−1, 2.5, 1, 1, 1), C = [1,−2, 1,−2, . . .], B = 1
0 5 10 15 20 25 30 35 4010
−12
10−10
10−8
10−6
10−4
10−2
100
102
104
space dimension
ab
so
lute
re
sid
ua
l n
orm
RKSM
Parameter computation:
Left: adaptive RKSM on A Right: adaptive RKSM on A−BB⊤Xk
(Lin & Simoncini 2015)
24

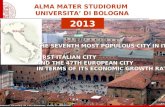
A numerical example on the role of BB⊤
Consider the 500× 500 Toeplitz matrix
A = toeplitz(−1, 2.5, 1, 1, 1), C = [1,−2, 1,−2, . . .], B = 1
0 5 10 15 20 25 30 35 4010
−12
10−10
10−8
10−6
10−4
10−2
100
102
104
space dimension
ab
so
lute
re
sid
ua
l n
orm
RKSM
0 5 10 15 20 25 30 35 4010
−12
10−10
10−8
10−6
10−4
10−2
100
102
104
space dimension
ab
so
lute
re
sid
ua
l n
orm
RKSM
Parameter computation:
Left: adaptive RKSM on A Right: adaptive RKSM on A−BB⊤Xk
(Lin & Simoncini 2015)
25

On the residual matrix and adaptive RKSM
Rk := AXk +XkA−XkBB⊤Xk + C⊤C
theorem. Let Tk = Tk −BkB⊤k Yk. Then
Rk = RkV⊤k + VkR
⊤k , with Rk = AVkYk + VkYkT ⊤
k + C⊤(CVk)
so that ‖Rk‖F =√2‖Rk‖F
At least formally:
⇒ VkYkV⊤k is a solution to the Riccati equation (Rk = 0) if and only
if Zk = VkYk is the solution to the Sylvester equation (Rk = 0)
26

On the residual matrix and adaptive RKSM
Rk = RkV⊤k + VkR
⊤k
Expression for the semi-residual Rk:
theorem. Assume C⊤ ∈ Rn, Range(Vk)= RKk(A,C
⊤, s). Assume
that Tk = Tk −BkB⊤k Yk is diagonalizable. Then
Rk = ψk,Tk(A)C⊤CVk(ψk,Tk
(−T ⊤k ))−1.
where
ψk,Tk(z) =
det(zI − Tk)∏kj=1(z − sj)
(see also Beckermann 2011 for the linear case)
27

On the choice of the next parameters sk+1
Rk = ψk,Tk(A)C⊤CVk(ψk,Tk
(−T ⊤k ))−1.
with ψk,Tk(z) = det(zI−Tk)∏
kj=1
(z−sj)
⋆ Greedy strategy: Next shift should make (ψk,Tk(−T ⊤
k ))−1 smaller
⇓
Determine for which s in the spectral region of Tk the quantity
(ψk,Tk(−s))−1 is large, and add a root there
sk+1 = arg maxs∈∂Sk
∣∣∣∣1
ψk,Tk(s)
∣∣∣∣
Sk region enclosing the eigenvalues of −Tk = −(Tk −BkB⊤k Yk)
(This argument is new also for linear equations)
28

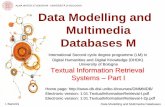
Selection of sk+1 in RKSM. An example
A: 900× 900 2D Laplacian, B = t1 with tj = 5 · 10−j ,
C = [1,−2, 1,−2, 1,−2, ...]
0 5 10 15 20 2510
−10
10−8
10−6
10−4
10−2
100
space dimension
ab
so
lute
re
sid
ua
l n
orm
t3
t3
t2
t2
t1
t1
RKSM convergence with and without modified shift selection as t varies
Solid curves: use of Tk Dashed curves: use of Tk
29

Further results not presented but relevant
• Stabilization properties of the approx solution Xk
• Accuracy tracking as the approximation space grows
• Interpretation via invariant subspace approximation
(V.Simoncini, 2016)
30

Wrap-up and outlook
♥ Projection-type methods fill the gap between MOR and Riccati equation
♥ Clearer role of the non-linear term during the projection
Projected Differential Riccati equations
(see, e.g., Koskela & Mena, tr 2017)
Parameterized Algebraic Riccation equations
(see, e.g., Schmidt & Haasdonk, tr 2017)
References
- V. Simoncini, Daniel B. Szyld and Marlliny Monsalve,
On two numerical methods for the solution of large-scale algebraic Riccati
equations IMA Journal of Numerical Analysis, (2014)
- Yiding Lin and V. Simoncini,
A new subspace iteration method for the algebraic Riccati equation
Numerical Linear Algebra w/Appl., (2015)
- V.Simoncini, Analysis of the rational Krylov subspace projection method for
large-scale algebraic Riccati equations SIAM J. Matrix Anal.Appl, (2016)
- V. Simoncini, Computational methods for linear matrix equations SIAM Review,
(2016).
31

Wrap-up and outlook
♥ Projection-type methods fill the gap between MOR and Riccati equation
♥ Clearer role of the non-linear term during the projection
♠ Projected Differential Riccati equations
(see, e.g., Koskela & Mena, tr 2017)
♠ Parameterized Algebraic Riccation equations
(see, e.g., Schmidt & Haasdonk, tr 2017)
References
- V. Simoncini, Daniel B. Szyld and Marlliny Monsalve,
On two numerical methods for the solution of large-scale algebraic Riccati
equations IMA Journal of Numerical Analysis, (2014)
- Yiding Lin and V. Simoncini,
A new subspace iteration method for the algebraic Riccati equation
Numerical Linear Algebra w/Appl., (2015)
- V.Simoncini, Analysis of the rational Krylov subspace projection method for
large-scale algebraic Riccati equations SIAM J. Matrix Analysis Appl, (2016).
- V. Simoncini, Computational methods for linear matrix equations (Survey article)
SIAM Review, (2016).
32

Wrap-up and outlook
♥ Projection-type methods fill the gap between MOR and Riccati equation
♥ Clearer role of the non-linear term during the projection
♠ Projected Differential Riccati equations
(see, e.g., Koskela & Mena, tr 2017)
♠ Parameterized Algebraic Riccation equations
(see, e.g., Schmidt & Haasdonk, tr 2017)
References
- V. Simoncini, Daniel B. Szyld and Marlliny Monsalve,
On two numerical methods for the solution of large-scale algebraic Riccati
equations IMA Journal of Numerical Analysis, (2014)
- Yiding Lin and V. Simoncini,
A new subspace iteration method for the algebraic Riccati equation
Numerical Linear Algebra w/Appl., (2015)
- V.Simoncini, Analysis of the rational Krylov subspace projection method for
large-scale algebraic Riccati equations SIAM J. Matrix Anal.Appl, (2016)
- V. Simoncini, Computational methods for linear matrix equations SIAM Review,
(2016)
33