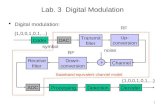
Digital Modulation
89
Chapter 1 :Digital Modulation techniques 1.1 WHAT IS THE MODULATION? Modulation is the process of encoding information from a message source in a manner suitable for transmission. It is generally involves translating a baseband message signal (called the source) to a bandpass signal at frequencies that are very high when compared to the base band frequency. The bandpass signal is called the modulated signal, and the baseband message signal is called the modulating signal. Modulation may be done by varying the amplitude, phase or frequency of a high frequency carrier in accordance with the amplitude of the message signal. Demodulation is the process of extracting the baseband message from the carrier so that it may be processed by the intended receiver. 1.1.1 Why we modulate signals? In order to ease propagation process and use an antenna of a suitable length. Since the effective radiation of EM waves requires antenna dimensions comparable with the wavelength: e.g. -Antenna for 3 kHz would be ~100 km long. -Antenna for 3 GHz carrier is 10 cm long. Sharing the access to the telecommunication channel resources: This is done by using FDM (Frequency division multiplexing) technique. In order to transmit larger power for wide area: If we amplify the data power using power amplifiers, it will be distorted, so we perform modulation and amplify the carrier power. In order to reduce noise effects in case of non-white Gaussian noise. 1.1.2 Why Digital? (Analog versus Digital): Modern mobile communication systems use digital modulation techniques. Advancements in very large-scale integration (VLSI) and digital signal processing (DSP) technology have made digital modulation more cost effective than analog transmission systems. Digital modulation offers many advantages over analog modulation. Some advantages include greater noise immunity and robustness to channel impairments, easier multiplexing of various forms of information (e.g., voice, data, and video), and greater security. Furthermore, digital transmissions accommodate digital error-control codes which detect and/or correct transmission errors, and support complex signal conditioning and processing techniques such as source coding, encryption, and equalization to improve the performance of the overall communication link. New multipurpose programmable digital signal processors have made it possible to implement digital modulators and demodulators completely in software. Instead of having a particular modem design permanently frozen as hardware, embedded
Transcript of Digital Modulation

Chapter 1 :Digital Modulation techniques
1.1 WHAT IS THE MODULATION? Modulation is the process of encoding information from a message source in a
manner suitable for transmission.
It is generally involves translating a baseband message signal (called the source) to a
bandpass signal at frequencies that are very high when compared to the base band
frequency.
The bandpass signal is called the modulated signal, and the baseband message signal
is called the modulating signal.
Modulation may be done by varying the amplitude, phase or frequency of a high
frequency carrier in accordance with the amplitude of the message signal.
Demodulation is the process of extracting the baseband message from the carrier so
that it may be processed by the intended receiver.
1.1.1 Why we modulate signals? In order to ease propagation process and use an antenna of a suitable length.
Since the effective radiation of EM waves requires antenna dimensions
comparable with the wavelength:
e.g. -Antenna for 3 kHz would be ~100 km long.
-Antenna for 3 GHz carrier is 10 cm long.
Sharing the access to the telecommunication channel resources:
This is done by using FDM (Frequency division multiplexing) technique.
In order to transmit larger power for wide area:
If we amplify the data power using power amplifiers, it will be distorted, so
we perform modulation and amplify the carrier power.
In order to reduce noise effects in case of non-white Gaussian noise.
1.1.2 Why Digital? (Analog versus Digital): Modern mobile communication systems use digital modulation techniques.
Advancements in very large-scale integration (VLSI) and digital signal processing
(DSP) technology have made digital modulation more cost effective than analog
transmission systems.
Digital modulation offers many advantages over analog modulation. Some
advantages include greater noise immunity and robustness to channel impairments,
easier multiplexing of various forms of information (e.g., voice, data, and video), and
greater security. Furthermore, digital transmissions accommodate digital error-control
codes which detect and/or correct transmission errors, and support complex signal
conditioning and processing techniques such as source coding, encryption, and
equalization to improve the performance of the overall communication link. New
multipurpose programmable digital signal processors have made it possible to
implement digital modulators and demodulators completely in software. Instead of
having a particular modem design permanently frozen as hardware, embedded

software implementations now allow alterations and improvements without having to
redesign or replace the modem.
We introduce here in table(1.1) a comparison between analog and digital modulation
schemes to conclude the assessment of both modulation schemes usage in Wireless
communication systems
Digital Analog
Large bandwidth(Disadvantage) Less bandwidth(Advantage)
Less accurate due to the Quantization
error that can not be avoided or
corrected. (Disadvantage)
More accurate (Advantage)
High noise immunity as the amplitude
of the digital has two levels only and
channel coding(error correcting
codes) can be used. (Advantage)
Low noise immunity (Disadvantage).
High level of security as you can use
Encryption (Ciphering) and
Authentication. (Advantage)
Low level of security. (Disadvantage)
Support complex signal conditioning
and processing techniques such as
source coding, encryption, and
equalization((Advantage)
No signal conditioning and processing
are used (Disadvantage)
High QOS. (Advantage) Low QOS. (Disadvantage)
You can use FDM, TDM, CDM,
OFDM multiplexing techniques.
(Advantage)
You can use FDM only(Disadvantage)
In mobile communications, digital
supports voice, SMS, data (you can
access the internet), images and video
call. (Advantage)
In mobile communications, analog
supports voice service only.
(Disadvantage)
Easily designed using software
(Advantage).
More difficult to design than Digital.
(Disadvantage)
Table (1.1) comparisons between analog and digital modulation schemes

1.1.3 Factors that influence the choice of digital modulation: A desirable modulation scheme should provide:
Low bit error rates at low received signal to noise ratio.
Performs well in multi-path and fading conditions, and in interference
environment.
Occupies a minimum bandwidth.
Easy and cost-effective to implement.
Cost and complexity of the receiver subscribers must be minimized.
Modulation which is simple to detect is most attractive.
Note That: There is no modulation scheme that satisfies all these requirements, so
trade-offs are made when selecting a modulation scheme.
1.1.4 The performance of a modulation scheme : We assess the performance of the modulation scheme by measuring the
Power efficiency (ηP).
Bandwidth efficiency(ηB).
Power spectral density.
System complexity.
1.1.4.1 Power efficiency ηP:
The power efficiency is defined as the required Eb/No (Ratio of the signal energy per
bit to noise power spectral density) at the input of the receiver for a certain bit error
probability Pb over an AWGN channel.
Power efficiency describes the ability of a modulation technique to preserve the bit
error probability of digital message at low power levels.
In digital modulation systems, in order to increase the noise immunity, it is necessary
to increase the signal power, so there is a trade-off between the signal power and the
bit error probability. The power efficiency is a measure of how favorably this trade-
off is made.
1.1.4.2 Bandwidth efficiency (Spectral efficiency) ηB:
Bandwidth efficiency describes the ability of a modulation scheme to accommodate
data within a limited bandwidth.
As the data rate increases, pulse width of the digital symbols decreases and hence the
bandwidth increases.
𝜂𝐵 =𝑅𝑏
𝐵𝑊 𝑏𝑝𝑠/𝐻𝑧 eqn (1.1)
The system capacity of a digital mobile communication system is directly related to
the bandwidth efficiency for a modulation scheme.
So a modulation scheme with greater value of ηB will transmit more data in a given
spectrum allocation.
Note that the maximum possible bandwidth efficiency is limited by the noise in the
channel according to Shannon's Theorem as:
𝜂𝐵 𝑚𝑎𝑥 =𝐶
𝐵𝑊= 𝑙𝑜𝑔2 1 +
𝑆
𝑁 eqn (1.2)
Where C is the channel capacity in bps , and S/N is the signal to noise ratio .

1.1.4.3 Bandwidth efficiency, Power efficiency Trade-off:
Adding error control coding to message increases the required bandwidth, then
𝜂𝐵decreases, but the required received power for a particular bit error rate decreases
and hence 𝜂𝑃 increases.
On the other hand using high levels M'ary modulation schemes (except in M’ary FSK
modulation which isn’t bandwidth limited modulation scheme), decreases the
bandwidth occupancy, 𝜂𝐵 increases, but the required received power for a particular
bit error rate increases and hence 𝜂𝑃 decreases.
1.1.4.4 System Complexity System complexity refers to the amount of circuits involved and the technical
difficulty of the system. Associated with the system complexity is the cost of
manufacturing, which is of course a major concern in choosing a modulation
technique.
Usually the demodulator is more complex than the modulator. Coherent
demodulator is much more complex than no coherent demodulator since carrier
recovery is required. For some demodulation methods, sophisticated algorithms like
the Viterbi algorithm are required.
Also note that, for all personal communication systems which serve a large
user community, the cost and complexity of the subscriber receiver must be
minimized, and a modulation which is simple to detection is most attractive
All these are basis for complexity comparison. Since power efficiency,
bandwidth efficiency, and system complexity are the main criteria of choosing a
modulation technique, we will always pay attention to them in the analysis of
modulation techniques.
1.1.4.5 Other considerations
While power and bandwidth efficiency considerations are very important, other
factors also affect the choice of a digital modulation scheme. For example The
performance of the modulation scheme under various types of channel impairments
such as Rayleigh and Rician fading and multipath time dispersion, given a particular
demodulator implementation, is another key factor in selecting a modulation. In
cellular systems where interference is a major issue, the performance of a modulation
scheme in an interference environment is extremely important.
Sensitivity to detection of timing jitter, caused by time-varying channels, is also an
important consideration in choosing a particular modulation scheme. In general, the
modulation, interference, and implementation of the time varying effects of the
channel as well as the performance of the specific demodulator are analyzed as a
complete system using simulation to determine relative performance and ultimate
selection.

1.1.5 Hierarchy of Digital modulation schemes Digital modulation techniques may be classified into coherent and noncoherent
techniques depending on whether the receiver is equipped with a phase-recovery
circuit or not. The phase recovery circuit ensures that the oscillator supplying the
locally generated carrier wave in the receiver is synchronized (in both frequency and
phase) to the transmitter oscillator.
Fig.(1.1) Digital modulation according to demodulation type
The modulation schemes listed in the fig.(1.2) and the tree are classified into two
large categories: constant envelope and nonconstant envelope. Under constant
envelope class, there are three subclasses: FSK and PSK. Under nonconstant envelope
class, there are three subclasses: ASK and QAM.
Fig.(1.2) Digital modulation hierarchy
Digital modulation schemes (according to receiver)
coherent demodulation
(All types of modulation )
noncoherent demodulation
(All types of modulation except PSK)
Digital Modulation
schemes
constant Envelope
FSK
-BFSK
-M'ary FSK
-MSK
-GMSK
PSK
-BPSK
-DPSK
-M'ary PSK.
-QPSK.
-OQPSK.
π / 4–QPSK
nonconstant envelope
ASK
-On-Off keying.
-M'ary ASK
M'ary QAM
-Rectangular QAM.
-circular QAM

1.1.6 Types of modulation schemes in different advanced digital
communication systems: In the table (1.2) we give examples of the used modulation schemes in
different wireless modern communication systems
Used modulation scheme Communication system GMSK GSM(Global System for Mobile
communications) 2G.
GPRS(General Packet Radio Service)
2.5G.
8PSK EDGE (Enhanced Data Rates for GSM
Evolution) 2.75G.
-QPSK in the forward channel (From
BTS to MS).
-OQPSK in the reverse channel
CDMA 2000 (Code Division Multiple
Access)
QPSK UMTS (Universal Mobile
Telecommunications System) 3G
-Adaptive modulation: depending on
signal quality and cell usage.
- QPSK , data rate: 1.8 Mbit/s
- 16QAM , data rate: 3.6 Mbit/s in
good radio conditions.
HSDPA (High-Speed Downlink Packet
Access). 3.5G
BPSK , QPSK , 16 QAM , 64 QAM Wi Fi (Wireless Fidelity)
Adaptive Modulation:
QPSK, 16 QAM, 64 QAM
WiMAX (the Worldwide
Interoperability for Microwave Access)
, Fixed and mobile
Table (1.2) Modulation schemes used in advanced communication systems
1.1.7 Geometric representation of Modulated signal(Constellation
diagram).
To proceed with the analysis of the digital modulation schemes we introduce the
constellation diagram as we can see the Digital modulation means choosing particular
signals from a finite set of a possible signal waveforms (symbols) based on the
information bits applied to modulator.
If there are total of M possible signals
S= 𝑠1 , 𝑠2 , … … . , 𝑠𝑀
For binary information bit S will contain two signals and For signal size of MIt is
possible to transmit log2M bits to represent a symbol.(ex. M=83 bits/symbol)
Vector space analysis provides valuable insight into the performance of particular
modulation scheme.
The idea is any realizable waveforms in a vector space can be expressed as a linear
combination of “N” orthonormal waveforms (called a basis signal).Once the basis
signal is determined we can express any signal as a linear combination of them.

1.1.7.1 The Basis signal conditions
(1) 𝑆𝑖 𝑡 = 𝑠𝑖𝑗 𝜙𝑗 (𝑡)𝑁𝑗 =1 eqn (1.3)
that means that any signal can be represented by linear combination of basis
functions
(2) Basis signals are orthogonal to each other in time
𝜙𝑖 𝑡 𝜙𝑗 𝑡 𝑑𝑡 = 0∞
−∞ i≠ 𝑗 eqn(1.4)
(3) Basis signals are normalized to unit energy
𝜙𝑖2 𝑡 𝑑𝑡 = 1
∞
−∞ eqn (1.5)
i.e. basis signals forms a coordinate system for the vector space
Note that:
no. of basis signals is less than or equal the signal set
No of basis signals is called dimension
1.1.7.2 Constellation diagram interpretation
The constellation diagram provides graphical representation of the complex envelope
of each possible symbol state. The X-axis of the diagram is called in-phase
component and the y-axis represents the quadrature component
The distance between signals on constellation diagram relates to how different the
modulation waveforms are and how well the receiver can differentiate between all
possible symbols when random noise is present.
Some of properties of the modulation scheme can be inferred from the constellation
diagram:
BW occupied by the modulation signals decreases as no. of points
increases i.e. if modulation scheme has a densely packed constellation it
would be more bandwidth efficient.
Pe is proportional to the distance between the closest points in constellation
densely packed modulation scheme is less energy efficient than the
modulation scheme that has sparse constellation
High Power efficiency low Power efficiency
Low Bw efficiency high Bw efficiency
____________________________________________________________
Fig.(1.3) comparison between constellation diagram interpretation on power and BW efficiencies.

1.1.7.3 Probability of error and constellation diagram
The constellation diagram can also be employed to find the upper bound for symbol
error rate in AWGN channel with PSD=No
Is
𝑃𝑠(휀|𝑠𝑖) ≤ 𝑄 𝑑𝑖𝑗
2𝑁𝑜 𝑗 =1,𝑗≠𝑖 eqn (1.6)
Where the Q-function is
𝑄 𝑥 = 1
2𝜋
∞
𝑥 exp(−𝑥2 2) 𝑑𝑥 eqn (1.7)
And dij is Euclidean distance between ith
and the jth
points.
1.2 LINE CODES Line codes (Baseband modulation) is defined as a direct transmission without
Frequency transform. It is the technology of representing digital sequences by pulse
waveforms suitable for baseband transmission. A variety of waveforms have been
proposed in an effort to find ones with some desirable properties, such as good
bandwidth and power efficiency, and adequate timing information. These baseband
modulation waveforms are variably called line codes, baseband formats (or
waveforms), PCM waveforms (or formats, or codes).
Any of several line codes can be used for the electrical representation of a
binary data stream. Figure (1.4) displays the waveforms of five important line codes
for the example data stream 01101001. Figure (1.5) displays their individual power
spectra (for positive frequencies) for randomly generated binary data,
Assuming that
symbols 0 and 1 are equiprobable,
the average power is normalized to unity, and
The frequency f is normalized with respect to the bit rate 1/Tb. The five
line codes illustrated in Figure (1.4) are described here:
1.2.1 Unipolar nonreturn-to-zero (NRZ) signaling
In this line code, symbol 1 is represented by transmitting a pulse A for the
duration of the symbol, and symbol 0 is represented by switching off the pulse, as in
Figure (1.4) (a).This line code is also referred to as on-off signaling.
Disadvantages of on-off signaling are the waste of power due to transmitted DC level
and the fact that the power spectrum of the transmitted signal does not approach zero
at zero frequency.

1.2.2 Polar nonreturn-to-zero (NRZ) signaling
In this second line code, symbol 1 and 0 are represented by transmitting pulse
of amplitudes +A and –A, respectively, as illustrated in Figure (1.4) (b). This line
code is relatively easy to generate but disadvantage is that the power spectrum of the
signal is large near zero frequency.
1.2.3 Unipolar return-to-zero (RZ) signaling
In this other line code, symbol 1 is represented by a rectangular pulse of
amplitude A and half-symbol 0 width, and symbol 0 is represented by transmitting no
pulse, as illustrated in Figure (1.4) (c). An attractive feature of this line code is the
presence of delta functions at f = 1/Tb in the power spectrum of the transmitted
signal, which can be used for bit-timing recovery at the receiver. However, its
disadvantage is that it requires 3db more power than polar return-to-zero signaling for
the same probability of symbol error.
____________________________________________________________________
Figure (1.4) Line codes for the electrical representation of binary data: (a) Unipolar NRZ signaling. (b) Polar NRZ signaling. (c) Unipolar RZ signaling. (d) Bipolar RZ
signaling. (e) Split-phase or Manchester code.

_____________________________________________________________________
Figure(1.5) Power spectra of line codes: (a) Unipolar NRZ signal. (b) Polar NRZ signal. (c) Unipolar RZ signal. (d) Bipolar RZ signal. (e) Manchester-encoded signal. The
frequency is normalized with respect to the bit rate 1/Tb and the average power is normalized to unity.

1.2.4 Bipolar return-to-zero (BRZ) signaling
This line code uses three amplitude level as indicated in Figure (1.4) (d). Specifically,
positive and negative pulses of equal amplitude (i.e., +A and –A) are used alternately
for symbol 1, with each pulse having a half-symbol width; no pulse is always used for
symbol 0. A useful property of the BRZ signaling is that the power spectrum of the
transmitted signal has no DC component and relatively insignificant low-frequency
components for the case when symbols 1 and 0 occur with equal probability. This line
code is also called alternate mark inversion (AMI) signaling
.
1.2.5 Split-phase (Manchester code)
In this method of signaling, illustrated in Figure (1.4) (e). symbol 1 is represented by
a positive pulse of amplitude A followed by a negative pulse of amplitude –A, with
both pulses being half-symbol wide. For symbol 0, the polarities of these two pulses
are reversed. The Manchester code suppresses the DC component and has relatively
insignificant low-frequency components, regardless of the signal statistics. This
property is essential in some applications.
1.2.6 Differential encoding
This method is used to encode information in terms of signal transitions. In particular,
a transition is used to designate symbol 0 in the incoming binary data stream, while no
transition is used to designate symbol l, as illustrated in Figure (1.6). In Figure
(1.6)(b).we show the differentially encoded data stream for the example data specified
in Figure (1.6)(a) .The original binary data stream used here is the same that used in
Figure (1.4). The waveform of the differentially encoded data is shown in Figure
(1.6)(c)., assuming the use of unipolar nonreturn-to-zero signaling. From Figure (1.6)
it is apparent that a differentially encoded signal may be inverted without affecting its
interpretation. The original binary information is recovered simply by comparing the
polarity of adjacent binary symbols to establish whether or not a transition has
occurred. Note that differential encoding requires the use of a reference bit before
initiating the encoding process. In Figure (1.6), symbol 1 is used as the reference bit.
_____________________________________________________________________
Figure (1.6)(a) Original binary data. (b) Differentially encoded data, assuming reference bit 1. (c) Waveform of differentially encoded data using unipolar NRZ
signaling.

_____________________________________________________________________
Figure (1.7). Block diagram of regenerative repeater.
1.3 PULSE SHAPING TECHNIQUES When rectangular pulses are passed through a bandlimited channel, the pulses will
spread in time, and the pulse for each symbol will smear into the time intervals of
succeeding symbols. This causes intersymbol interference (ISI) and leads to an
increased probability of the receiver making an error in detecting a symbol. One
obvious way to minimize intersymbol interference is to increase the channel
bandwidth. However, mobile communication systems operate with minimal
bandwidth, and techniques that reduce the modulation bandwidth and suppress out-of-
band radiation, while reducing intersymbol interference, are highly desirable. Out-of-
band radiation in the adjacent channel in a mobile radio system should generally be 40
dB to 80 dB below that in the desired passband. Since it is difficult to directly
manipulate the transmitter spectrum at RF frequencies, spectral shaping is done
through baseband or IF processing. There are a number of well known pulse shaping
techniques which are used to simultaneously reduce the intersymbol effects and the
spectral width of a modulated digital signal.
1.3.1 Intersymbol Interference (ISI)
Intersymbol interference (ISI) is a source of bit errors in a baseband-pulse transmission
system. It arises when the channel is dispersive.
Consider this baseband binary transmission system as shown in figure
____________________________________________________________________
Figure (1.8) Baseband binary data transmission system
Amplifier-equalizer
Decision-making device
Timing
circuit
Distorted PCM wave
Regenerated PCM wave

The output of the receiver would be
𝑦 𝑡 = 𝜇 𝑎𝑘𝑘 𝑝 𝑡 − 𝑘𝑇𝑏 + 𝑛(𝑡) eqn (1.8)
Input binary data bk consists of symbols 1 and 0 each of duration Tb. PAM modifies this
binary sequences into a new sequence of short pulses.
ak = +1 if symbol bk is 1−1 if symbol bk is 0
eqn (1.9)
s t = ak g t − kTb k eqn(1.10)
y t = μ ak p t − kTb + n(t)
where is a scaling factor and p(t) is to be defined and normalized i.e p(0) = 1
P(t) = g(t) * h(t) * c(t) eqn (1.11)
* denotes convolution
Convolution in time domain multiplication in (f) domain
P(f) = G(f) H(f) C(f) ) eqn (1.12)
Receive filter output y(t) is sampled at time ti = iTb.
𝑦 𝑡𝑖 = 𝜇 𝑎𝑘∞𝑘=−∞ 𝑝 𝑖 − 𝑘 𝑇𝑏 + 𝑛 𝑡𝑖
= 𝜇 𝑎𝑖 + 𝜇 𝑎𝑘∞𝑘=−∞
𝑘≠𝑖
𝑖 − 𝑘 𝑇𝑏 + 𝑛 𝑡𝑖 eqn(1.13)
ai is the contribution of the ith
transmitted bit
BUT Second term represents the ISI
[Residual effect due to the occurrence of pulse before and after the sampling time
instant ti is called ISI]
Note that:
Under normal (ideal) conditions the ith
transmitted bit is decoded correctly.
ISI and noise in system introduce errors in decision device at the receiver.
We want to minimize these effects to reach good decoding.
We will neglect noise now to concentrate on ISI only.
1.3.2 Nyquist’s criterion for Distortion less Base Band Binary Transmission
Typically The frequency response of the channel and the transmission pulse shape are
specified, the problem is to determine the frequency responses of the transmit and receive
filters to reconstruct the original binary data sequence (bk). Extraction involves sampling the
o/p y(t) at time t=iTb.
The decoding requires that the weighted pulse contribution akP(iTb – kTb) for k=i be free from
ISI due to overlapping tails of all other weighted pulse contributions represented by ki
We control pulse p(t) such that 𝑝 𝑖𝑇𝑏 − 𝑘𝑇𝑏 = 1 𝑖 = 𝑘0 𝑖 ≠ 𝑘
If p(t) satisfies this ISI will vanish.

How to design this?
Converting to frequency domain considering sampling process in time and frequency domain
and periodicity in (f) domain.
F.T of infinite periodic sequence of delta function of period Tb whose individual areas
are weighted by the respective sample value of p(t) that is given P(f) is given by
𝑃𝛿 𝑓 = 𝑅𝑏 𝑃(𝑓 − 𝑛𝑅𝑏∞𝑛=−∞ )
= 𝑝 𝑚𝑇𝑏 𝛿 𝑡 − 𝑚𝑇𝑏 𝑒−𝑗2𝜋𝑓𝑡∞𝑚=−∞
∞
−∞𝑑𝑡 eqn(1.14)
Let m = i – k i = k corresponds to m = 0
i k corresponds to m 0
𝑝𝛿 𝑓 = 𝑝 0 𝛿(𝑡)∞
−∞𝑒−𝑗2𝜋𝑓𝑡 𝑑𝑡 = 𝑝 0 = 1 eqn(1.15)
Condition of zero ISI is
𝑃 𝑓 − 𝑛𝑅𝑏 = 𝑇𝑏∞𝑛=−∞ eqn(1.16)
Nyquist criterion for distortion less baseband transmission in the absence of noise
Ideal Nyquist channel 𝑃 𝑓 = 1
2𝑤 𝑟𝑒𝑐𝑡
𝑓
2𝑤
𝑤 = 𝑅𝑏
2=
1
2𝑇𝑏
𝑝 𝑡 = 𝑠𝑖𝑛𝑐(2𝑤𝑡) eqn(1.17)
Note:
Rb = 2w is called Nyquist rate.
W is called Nyquist bandwidth
_____________________________________________________________________
Figure (1.9) Nyquist criterion for ISI cancellation (ideal Nyquist channel)
(a) Ideal magnitude. (b) Ideal basic pulse shape

This transfer function corresponds to a rectangular "brick-wall" filter with
absolute bandwidth=Rb/2 where Rb is the bit rate. While this transfer function
satisfies the zero ISI criterion with a minimum of bandwidth, there are practical
difficulties in implementing it, since it corresponds to a noncausal system (h(t) exists
for t< 0) and is thus difficult to approximate.
Also, the (sin t) /t pulse has a waveform slope that is 1/t at each zero crossing,
and is zero only at exact multiples of 7's, thus any error in the sampling time of zero-
crossings will cause significant ISI due to overlapping from adjacent symbols (A
slope of 1/t2 or 1/t3 is more desirable to minimize the ISI due to timing jitter in
adjacent samples).
1.3.3 Raised Cosine Filter To overcome the practical difficulties encountered with ideal Nyquist channel
by extending the B.W from the minimum value w = Rb/2 to an adjustable value
between w and 2w we use the overall frequency response p(f) to satisfy a condition
more elaborate than that for the ideal Nyquist channel
𝑝 𝑓 + 𝑝 𝑓 − 2𝑤 + 𝑝 𝑓 + 2𝑤 = 1
2𝑤 − 𝑤 ≤ 𝑓 ≤ 𝑤 eqn(1.18)
𝑝 𝑓 =
1
2𝑤 0 ≤ 𝑓 ≤ 𝑓1
1
4𝑤 1 − 𝑠𝑖𝑛
𝜋( 𝑓 −𝑤)
2𝑤−2𝑓1 𝑓1 ≤ 𝑓 ≤ 2𝑤 − 𝑓1
0 𝑓 ≥ 2𝑤 − 𝑓1
eqn(1.19)
Where = 1 −𝑓1
𝑤
is called roll off factor which indicates the excess bandwidth over the ideal
solution w.
Transmission B.W BT = 2w – f1 = (1+) W.
This transfer function is plotted in Figure 1.10 for various values of a. When = 0.
the raised cosine rolloff filter corresponds to a rectangular filter of minimum
bandwidth. The corresponding impulse response of the filter can be obtained by
taking the inverse Fourier transform of the transfer function, and is given by
p t = sinc 2wt cos 2πα wt
1−16α2w2t2 eqn (1.20)
Notice that the impulse response decays much faster at the zero-crossings
(approximately as 1/t3 for t>> when compared to the 'brick-wall" filter (=0). The
rapid time rolloff allows it to be truncated in time with little deviation in performance
from theory. As seen from Figure 1.10, as the rolloff factor a increases, the bandwidth
of the filter also increases, and the time side lobe levels decrease in adjacent symbol
slots. This implies that increasing a decreases the sensitivity to timing jitter, but
increases the occupied bandwidth.
The spectral efficiency offered by a raised cosine filter only occurs if the exact
pulse shape is preserved at the carrier. This becomes difficult if nonlinear RF

amplifiers are used. Small distortions in the baseband pulse shape can dramatically
change the spectral occupancy of the transmitted signal. If not properly controlled,
this can cause serious adjacent channel interference in mobile communication
systems. A dilemma for mobile, communication designers is that the reduced
bandwidth offered by Nyquist pulse shaping requires linear amplifiers which are not
power efficient. An obvious solution to this problem would be to develop linear
amplifiers which use real time feedback to offer more power efficiency, and this is
currently an active research thrust for mobile communications.
_______________________________________________________________
Figure (1.10) Responses for different rolloff factors of raised cosine filter.
(a) Frequency response. (b) Time response.

1.3.4 Gaussian Filter It is also possible to use non-Nyquist techniques for pulse shaping. Prominent among
such techniques is the use of a Gaussian pulse-shaping filter which is particularly
effective when used in conjunction with Minimum Shift Keying (MSK) modulation,
or other modulations which are well suited for power efficient nonlinear amplifiers.
Unlike Nyquist filters which have zero-crossings at adjacent symbol peaks and a
truncated transfer function, the Gaussian filter has a smooth transfer function with no
zero-crossings.
The impulse response of the Gaussian filter gives rise to a transfer function that is
highly dependent upon the 3-dB bandwidth. The Gaussian Iowpass filter has a
transfer function given By
𝐻𝐺 𝑓 = exp(−𝛼2𝑓2) eqn(1.21)
The parameter α is related to bandwidth , the 3-dB bandwidth of the baseband
Gaussian shaping filter is given by,
𝛼 =0.5887
𝐵 eqn(1.22)
As a increases, the spectral occupancy of the Gaussian filter decreases and time
dispersion of the applied signal increases. The impulse response of the Gaussian filter
is given by
𝐺 𝑡 = 𝜋
𝛼exp −
𝜋2
𝛼2 𝑡2 eqn(1.23)
Figure 1.11 shows the impulse response of the baseband Gaussian filter for various
values of 3-dB bandwidth-symbol time product (BTS). The Gaussian filter has a
narrow absolute bandwidth (although not as narrow as a raised cosine rolloff filter),
and has sharp cut-off, low overshoot, and pulse area preservation properties which
make it very attractive for use in modulation techniques that use nonlinear RF
amplifiers and do not accurately preserve the transmitted pulse shape .
It should be noted that since the Gaussian pulse-shaping filter does not satisfy the
Nyquist criterion for ISI cancellation, reducing the spectral occupancy creates
degradation in performance due to increased ISI. Thus, a trade-off is made between
the desired RF bandwidth and the irreducible error due to ISI of adjacent symbols
when Gaussian pulse shaping is used. Gaussian pulses are used when cost is a major
factor and the bit error rates due to ISI are deemed to be lower than what is nominally
required.
Figure (1.11) impulse response of Gaussian shaping filter

1.4 AMPLITUDE-SHIFT KEYING (ASK) MODULATION
1.4.1 Introduction Amplitude shift keying (ASK) is nonconstant modulation scheme where the
amplitude of the carrier frequency is changed with respect to the message signal.
When the amplitude is altered between “A” and zero volt the modulation is
considered on-off keying .Also the ASK modulation can ne extended to M’ary
modulation scheme with Multi-level signal. The ASK can be coherently or
noncoherently demodulated.
1.4.2 Binary Amplitude-Shift Keying (BASK)
A binary amplitude-shift keying (BASK) signal can be defined by
𝑠 𝑡 = 𝐴𝑚 𝑡 cos 2𝜋𝑓𝑐𝑡 0 ≤ 𝑡 ≤ 𝑇 eqn (1.23)
where A is a constant, m(t) = 1 or 0, fc is the carrier frequency, and T is the bit
duration. It has a power P =A2
2, so that A = 2P . Thus equation (1) can be written as
𝑠 𝑡 = 2𝑃 cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇
= 𝑃𝑇 2
𝑇cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇
= 𝐸 2
𝑇cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇 eqn (1.24)
where E = P T is the energy contained in a bit duration.
If we take ∅1 t = 2
T cos2πfct as the orthonormal basis function, the applicable
signal space or constellation diagram of the BASK signals is shown in Figure (1.11).
Figure (1.11) BASK signal constellation diagram.
Figure (1.12) shows the BASK signal sequence generated by the binary sequence 0 1
0 1 0 0 1. The amplitude of a carrier is switched or keyed by the binary signal m(t).
This is sometimes called on-off keying (OOK).
_____________________________________________________________________
Figure (1.12) (a) Binary modulating signal and (b) BASK signal

The Fourier transform of the BASK signal s(t) is
𝑆 𝑓 = 𝐴
2 𝑚 𝑡 𝑒𝑗 2𝜋𝑓𝑐𝑡
∞
−∞𝑒−𝑗2𝜋𝑓𝑡 𝑑𝑡 +
𝐴
2 𝑚 𝑡 𝑒−𝑗 2𝜋𝑓𝑐𝑡
∞
−∞𝑒−𝑗2𝜋𝑓𝑡 𝑑𝑡
𝑆 𝑓 = 𝐴
2 𝑀 𝑓 − 𝑓𝑐 +
𝐴
2 𝑀 𝑓 + 𝑓𝑐 eqn (1.25)
The effect of multiplication by the carrier signal Acos 2πfct is simply to shift
the spectrum of the modulating signal m (t) to fc. Figure 1.13 shows the amplitude
spectrum of the BASK signals when m(t) is a periodic pulse train. Since we define the
bandwidth as the range occupied by the baseband signal m(t) from 0 Hz to the first
zero-crossing point, we have B Hz of bandwidth for the baseband signal and 2B Hz
for the BASK signal.
_____________________________________________________________________
Figure (1.13) (a) Modulating signal, (b) spectrum of (a), and (c) spectrum of BASK signals.
Figure (1.14) shows the modulator and a possible implementation of the coherent
demodulator for BASK signals.
_____________________________________________________________________
Figure (1.14) (a) BASK modulator and (b) coherent demodulator.

1.4.3 M-ary Amplitude-Shift Keying (M-ASK)
An M-ary amplitude-shift keying (M-ASK) signal can be defined by
𝑠 𝑡 = 𝐴𝑖 𝑐𝑜𝑠2𝜋𝑓𝑐𝑡 0 ≤ 𝑡 ≤ 𝑇0, 𝑒𝑙𝑠𝑒𝑤𝑒𝑟𝑒
eqn (1.26)
where
Ai = A[2i - (M - 1)] eqn (1.27)
for i = 0, 1, ..., M - 1 and M > 4. Here, A is a constant, fc is the carrier frequency, and T
is the symbol duration. The signal has a power Pi =𝐴2
2,, so that Ai = 2𝑃𝑖 .
Thus equation (4) can be written as
𝑠 𝑡 = 2𝑃𝑖 cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇
= 𝑃𝑖𝑇 2
𝑇cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇
= 𝐸𝑖 2
𝑇cos 2𝜋𝑓𝑐𝑡 , 0 ≤ 𝑡 ≤ 𝑇 eqn(1.28)
where Ei = PiT is the energy of s(t) contained in a symbol duration for i = 0, 1, ..., M -1.
Figure (1.15) shows the signal constellation diagrams of M-ASK and 4-ASK signals.
_____________________________________________________________________
Figure (1.15) (a) M-ASK and (b) 4-ASK signal constellation diagrams.
Figure (1.16) shows the 4-ASK signal sequence generated by the binary sequence 00
01 10 11.
____________________________________________________________________
Figure (1.16) 4-ASK modulation: (a) binary sequence, (b) 4-ary signal, and (b) 4-ASK signal.

Figure (1.17) shows the modulator and a possible implementation of the coherent
demodulator for M-ASK signals.
_____________________________________________________________________
Figure 1.17 (a) M-ASK modulator and (b) coherent demodulator.
1.4.4 Probability of error: For binary ASK (or as special case OOK signal) the probability of error would be
𝑃𝑒 = 𝑄 𝐸𝑏
2𝑁0 eqn(1.29)
And For M-ary ASK (MAM) the probability of error would be
𝑃𝑠 =2(𝑀−1)
𝑀𝑄
6(𝑙𝑜𝑔 2𝑀)𝐸𝑏 𝑎𝑣𝑔
𝑀2−1 𝑁𝑜 eqn(1.30)
1.5 PHASE SHIFT KEYING MODULATION TECHNIQUES
Phase shift keying is constant envelope modulation technique where the phase of the
carrier is switched according to the message signal and normally cannot be
noncoherently demodulated . We begin this section with binary PSK(BPSK) followed
by the differential PSK (DPSK) as a brilliant solution of noncoherent demodulation of
the PSK, Then we introduce the M’ary PSK followed by a common and robust special
case modulation scheme the later which is quadrature PSK (QPSK) and its modified
versions offset QPSK(OQPSK) and (π/4 QPSK)

1.5.1 Binary phase shift keying (BPSK):-
Here the phase of constant amplitude carrier signal is switched between two values
according to the possible signals m1, m2 which corresponds to 1, 0.
Normally m1, m2 phases are separated by 180 phase shift and amplitude of Ac and
energy per bit (Eb= 1
2𝐴𝑐
2Tb)
1.5.1.1 BPSK Signal equation:
𝑆𝐵𝑃𝑆𝐾 = 2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓𝑐𝑡 + 𝜃𝑐 0 ≤ 𝑡 ≤ 𝑇𝑏 (for binary 1) eqn(1.31)
OR: The signal is shifted by 𝜋 when transmitting binary zero which means
𝑆𝐵𝑃𝑆𝐾 = − 2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓𝑐𝑡 + 𝜃𝑐 0 ≤ 𝑡 ≤ 𝑇𝑏 (for binary 0) eqn(1.32)
These signals are referred to as antipodal signals and is normalized to unit energy
The reason that they are chosen is that they have a correlation coefficient of -1, which
leads to the minimum error probability for the same Eb/No, as we will see shortly.
If m(t) represents binary data which takes on one of two possible pulse shapes(1,-1) as
general case
𝑆𝐵𝑃𝑆𝐾 = 𝑚(𝑡) 2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓𝑐𝑡 + 𝜃𝑐 0 ≤ 𝑡 ≤ 𝑇𝑏 eqn(1.33)
Therefore The BPSK signal is equivalent to a double sideband suppressed carrier
amplitude modulated waveform, where cos (2𝜋𝑓𝑐𝑡) is applied as the carrier, and the
data signal in m(t) is applied as the modulating waveform. Hence a BPSK signal can
be generated using a balanced modulator.
1.5.1.2 Time domain
For the binary data {10110} the modulated carrier would be
Figure 1.18 BPSK signal in time domain

1.5.1.3 Spectrum & Bandwidth
The power spectral density (PSD) of the complex envelope can be shown to be:
𝑆𝐵 𝑓 = 2𝐸𝑏𝑠𝑖𝑛𝑐2 𝑇𝑏𝑓 eqn(1.34)
Where Eb is bit energy and Tb is bit duration
That is equivalent to PSD at RF
𝑃𝑃𝑆𝐾 =𝐸𝑏
2
sin (𝜋(𝑓−𝑓𝑐)𝑇𝑏
𝜋(𝑓−𝑓𝑐)𝑇𝑏
2+
sin (𝜋(−𝑓−𝑓𝑐)𝑇𝑏
𝜋(−𝑓−𝑓𝑐)𝑇𝑏
2 eqn(1.35)
Which result in Null to null BW=twice bit rate
𝑁𝑢𝑙𝑙 𝑡𝑜 𝑛𝑢𝑙𝑙 𝐵𝑊 = 2𝑅𝑏 eqn(1.36)
From figure (1.19) we conclude that 90% of BPSK energy is contained within an
approximately equal to 1.6 Rb and we can also find that with using a raised cosine
filter of 𝑟𝑜𝑙𝑙 𝑜𝑓 𝑓𝑎𝑐𝑡𝑜𝑟 𝛼 = 0.5 all energy are contained within 1.5 Rb
Figure (1.19) BPSK spectrum with rectangular and raised cosine filter with roll of factor=0.5
1.5.1.4 Constellation diagram
Let, 𝜙1 = 2
𝑇𝑏cos 2𝜋𝑓𝑐𝑡 + 𝜃𝑐 is the basis signal then we will have two
constellation points separated by 180 degree phase shift
Therefore A coherent binary PSK system is characterized by having a signal space
that is one dimensional (i.e. N=1), with a signal constellation consisting of two
message points

Figure (1.20) BPSK constellation diagram
1.5.1.5 Modulator
Using a balanced modulator after putting the binary data on the form of polar NRZ
(non return to zero) (-1,+1) we can generate the BPSK signal note that the carrier
frequency 𝑓𝑐 must satisfy that 𝑓𝑐 = 𝑚𝑅𝑏 for satisfying synchronization i.e ensure that
each transmitted bit contains an integral number of cycles of the carrier wave.
Figure (1.21) BPSK modulator
1.5.1.6 Demodulator:-
As we pointed out before the PSK modulation must be coherently demodulated so a
carrier recovery circuit (Costas loop-phase locked loop) must be employed to obtain
the carrier.
To detect the original binary sequence of 1’s and zero’s we apply the noisy PSK
signal to a correlator which is supplied with the locally generated carrier the correlator
output is compared with a threshold of zero volts if the output exceeds zero the
receiver decides in favor of symbol 1 otherwise the receiver decides in favor of zero.

Figure (1.22) BPSK demodulator
𝑥0 𝑡 = 𝑚 𝑡 2𝐸𝑏
𝑇𝑏𝑐𝑜𝑠2 2𝜋𝑓𝑐𝑡 + 𝜃 = 𝑚 𝑡
2𝐸𝑏
𝑇𝑏
1
2+
1
2cos(2(2𝜋𝑓𝑐𝑡 + 𝜃) eqn(1.37)
When no pilot signal is transmitted a Costas loop or squaring loop may be used to
synthesize the carrier phase and frequency from the received BPSK signal. Figure
(1.23) shows the block diagram of a BPSK receiver along with the carrier recovery
circuits.
Figure (1.23) shows the block diagram of a BPSK receiver along with the carrier
recovery circuits.
The received signal is squared to generate a dc signal and an amplitude varying
sinusoid at twice the carrier frequency. The de signal is filtered out using a bandpass
filter with center frequency tuned to A frequency divider is then used to recreate the
waveform.

1.5.1.7 Power sufficiency & bandwidth efficiency:-
Since we have only two constellation points hence we have
High power efficiency
Low bandwidth efficiency: the symbol is represented by 1 bit
𝜂 =𝑅𝑏
𝐵𝑊= 0.5 eqn(1.38)
1.5.1.8 Probability of error:-
Since that Distance between constellation points =2 𝐸𝑏 .
Then the probability of error is derived from the general probability of error equation
of the matched filter (correlator) receiver
𝑃𝑒 = 𝑄 𝐸1+𝐸2−2𝜌12 𝐸1𝐸2
2𝑁𝑜 eqn(1.39)
With 𝜌 = −1 and E1=E2=Eb in the BPSK modulation therefore
𝑃𝑒 = 𝑄 2𝐸𝑏
𝑁𝑜 =
1
2𝑒𝑟𝑓𝑐
𝐸𝑏
𝑁𝑜 eqn(1.40)
1.5.2 Differential phase shift keying (DPSK):-
As we have seen in BPSK modulation that the demodulator must be coherent i.e. it
needs a reference signal to be demodulated which will increase the complexity of the
demodulator by the synchronization circuits and the reason of this that the
demodulator must preserve the phase of the carrier which includes the message. From
here a noncoherent version of BPSK is needed.
the idea here is to equip the receiver with storage capability so as it can measure the
relative phase difference between the waveforms received during two successive bit
intervals provided that the unknown phase varies slowly (slow enough to be
considered constant over the two bit intervals)
That is we consider the differential PSK (DPSK) as Noncoherent form of PSK. which
will result in many advantages such as: no need for coherent reference signal and the
receivers are cheap to build.
This would be done by differential encoding i.e. The input binary sequence is first
differentially encoded & then modulated using BPSK modulator.
1.5.2.1 Differential encoding procedure:
Here we encode the baseband data before modulating it onto carrier.The encoded
output bit is determined from the input bit and the previous output bit.
Let ak: original binary data. And
dk: encoded binary data sequence.
Encoding:
𝑑𝑘 = 𝑎𝑘⨁𝑑𝑘−1 eqn(1.41)
Decoding:
𝑎𝑘 = 𝑑𝑘⨁𝑑𝑘−1 eqn(1.42)

The effect:to leave symbol dk unchanged from the previous symbol if ak=1 & toggle if
else.
Example of differential encoding:
Table (1.3) Example of differential encoding
1.5.2.2 Modulator:
Figure (1.24) DPSK modulator
It consists of a one bit delay element and a logic circuit interconnected so as to
generate the differentially encoded sequence from the input binary sequence. The
output is passed through a product modulator to obtain the DPSK signal i.e. output bit
is delayed by 1 bit duration and XNORed with newer i/p bit,Then the o/p sequence is
transformed to polar NRZ and then it will be like BPSK.
1.5.2.3 Demodulator:-
(1) Suboptimum receiver:
At the receiver, the original sequence is recovered from the demodulated differentially
encoded signal through a complementary process,
Figure (1.25) Suboptimum receiver of DPSK modulation
mk 1 0 0 1 0 1 1 0
dk-1 1 1 0 1 1 0 0 0
dk 1 1 0 1 1 0 0 0 1

(2) Optimum receiver:
The demodulator does not require phase synchronization between the reference
signals and the received signal. But it does require the reference frequency be the
same as the received signal this can be maintained by using stable oscillators, such
as crystal oscillators, in both transmitter and receiver. However, in the case where
Doppler shift exists in the carrier frequency, such as in mobile communications,
frequency tracking is needed to maintain the same frequency Therefore the
suboptimum receiver is more practical, and indeed it is the usual-sense DBPSK
receiver. Its error performance is slightly inferior to that of the optimum
Figure (1.26) Optimum receiver of DPSK modulation
1.5.2.4 Example:
A complete example of differential PSK (DPSK) is shown in Table (1.4)
Modulation ref
Message ak 1 0 1 1 0 0 0 1 1
Encoding 𝑑𝑘 = 𝑎𝑘⨁𝑑𝑘−1 1 1 0 0 0 1 0 1 1 1
Signal phase 𝜃 0 0 𝜋 𝜋 𝜋 0 𝜋 0 0 0
Demodulation
Output of correlator
1 -1 1 1 -1 -1 -1 1 1
Demodulator output 1 0 1 1 0 0 0 1 1
Table(1.4) DPSK example
1.5.2.5 Advantages & disadvantages:-
Advantage.: reduce the receiver complexity.
Disadvantage.: energy efficiency is less than coherent PSK by 3 dB

1.5.2.6 Power spectral density:
The same as BPSK Since the difference of differentially encoded BPSK from BPSK
is differential encoding, which always produces an asymptotically equally likely data
sequence the PSD ofthe differentially encoded BPSK is the same as BPSK which we
assume is equally likely
1.5.2.7 Probability of error:-
𝑃𝑒 =1
2𝑒−𝐸𝑏 /𝑁𝑜 eqn (1.43)
Which provides a gain of 3 dB over noncoherent FSK for same Eb/No
Figure (1.27) Performance comparison between coherent BPSK,coherent DPSK
,optimum and suboptimum DPSK
1.5.3 M-ary phase shift keying(M’ary PSK/MPSK)
The motivation behind MPSK is to increase the bandwidth efficiency of the PSK
modulation schemes. In BPSK, a data bit is represented by a symbol. In MPSK,
n = log2 M data bits are represented by a symbol, thus the bandwidth efficiency is
increased to n times. Among all MPSK schemes, QPSK is the most-often-used
scheme since it does not suffer from BER degradation while the bandwidth efficiency
is increased. We will see this in Section 4.6. Other MPSK schemes increase
bandwidth efficiency at the expenses of BER performance. Here carrier phase takes
on one of M possible values namely
𝜃𝑖 =2(𝑖−1)𝜋
𝑀 eqn(1.44)
Where i=1,2,3,….M

1.5.3.1 Signal Equation:-
𝑆𝑖 𝑡 = 2𝐸𝑠
𝑇𝑠cos 2𝜋𝑓𝑐𝑡 +
2𝜋
𝑀 𝑖 − 1 0 ≤ 𝑡 ≤ 𝑇𝑠 eqn (1.45)
i=1,2,…..,M &
Ts: is symbol time=(log2M)Tb . And
Es=symbol energy=(log2M)Eb
Using trigonometric identities:-
𝑆𝑖 𝑡 = 2𝐸𝑠
𝑇𝑠[cos((𝑖 − 1)
2𝜋
𝑀)cos(2𝜋𝑓𝑐 𝑡) − sin((𝑖 − 1)
2𝜋
𝑀)sin(2𝜋𝑓𝑐𝑡)] eqn(1.46)
Let 𝜙1(𝑡) = 2
𝑇𝑠cos 2𝜋𝑓𝑐𝑡 , 𝜙2(𝑡) =
2
𝑇𝑠sin 2𝜋𝑓𝑐 𝑡 are the basis signals
𝑆𝑖 𝑡 = 𝐸𝑠[cos((𝑖 − 1)2𝜋
𝑀)𝜙1(𝑡) − sin((𝑖 − 1)
2𝜋
𝑀)𝜙2(𝑡)] eqn(1.47)
1.5.3.2 Constellation diagram:-
(1) Since we have two basis signals two dimensional diagram
(2) From equation the envelope is constant (when no pulse shaping is employed)
while the phase is varyingthat can be represented by equally spaced
message points on a circle of radius 𝐸𝑠
(3) Gray coding is usually used in signal assignment in MPSK to make only one
bit difference to two adjacent signals1 bit error
An example of 8-ary PSK with gray coding is as shown:-
Figure (1.28) 8PSK modulation with gray coding assignment

1.5.3.3 Probability of error:
From the geometry of the constellation we will find that the distance between adjacent
symbols is equal to 2 𝐸𝑠 sin 𝜋
𝑀
Figure (1.29) Formulation of probability of error expression for MPSK signal
And hence using eqn(1.39) we will find that average symbol error probability equal
𝑃𝑒 ≤ 2𝑄 2𝐸𝑏 𝑙𝑜𝑔2𝑀
𝑁𝑜 𝑠𝑖𝑛
𝜋
𝑀 eqn(1.48)
& For M≥ 4:-
𝑃𝑒 ≈ 2𝑄 4𝐸𝑠
𝑁𝑜 𝑠𝑖𝑛
𝜋
2𝑀 eqn(1.49)
1.5.3.4 Power spectra of M-ary PSK:- The first null BW decrease as M increases while bit rate is held constant
𝑆𝐵 𝑓 = 2𝐸 𝑠𝑖𝑛𝑐2 𝑇𝑓
= 2𝐸𝑏 𝑙𝑜𝑔2𝑀 𝑠𝑖𝑛𝑐2(𝑇𝑏𝑓𝑙𝑜𝑔2𝑀 ) eqn (1.50)

Figure (1.30) Spectrum and the bandwidth of MPSK signal
1.5.3.5 Power & BW efficiency:-
As the value of M increases, the bandwidth efficiency increases. That is, for fixed
Rb, 𝜂 increases and Bandwidth decreases as M is increased.
At the same time, increasing M implies that the constellation is more densely packed,
and hence the power efficiency (noise tolerance) is decreased
so As M increases
(a) Bandwidth efficiency increases
(b) Power efficiency decreases.
Where
𝐵𝑊𝑚𝑎𝑖𝑛 𝑐𝑒𝑛𝑡𝑟𝑎𝑙 𝑙𝑜𝑏𝑒 =2
𝑇𝑠 =
2𝑅𝑏
log 2 𝑀 eqn(1.51)
Therefore,
𝜂 𝐵𝑊 𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑐𝑦 =log2 𝑀
2
And To ensure that there is no degradation in error performance (BER) the ratio Eb/No
must increase.
Table (1.5) gives a values of both the bandwidth and power efficiencies of M-ary PSK
signals
M 2 4 8 16 32 64
𝜼𝑩 = 𝑹𝒃/𝑩 0.5 1 1.5 2 2.5 3
Eb/No for BER =10-6 10.5 10.5 14 18.5 23.4 28.5
Table (1.5) bandwidth and power efficiencies of M-ary PSK signals

The relation between symbol error & Eb/No is as following:
Figure(1.31) symbol error rate versus signal to noise ratio for various modulation PSK schemes
1.5.3.6 Modulator:-
For M≥ 4we can use a quadrature modulator.
The only difference for different values of M is the level generator
The level generator gives two signals corresponding to each n bits of the input
sequence(symbol) by changing the levels of these signals we can vary the
phase.
Note that the M-ary can be directly modulated or differentially encoded to
provide noncoherent detection

Figure (1.32) MPSK modulator
1.5.3.7 Demodulator:-
Figure (1.33) MPSK demodulator
1.5.4 Quadrature phase shift keying (QPSK)
QPSK has the twice bandwidth efficiency of BPSK, since 2 bits are transmitted in a
single modulation symbol.
The phase of the carrier takes on 1 of 4 equally spaced value such as 0, π/2, π, 3π/2,
where each value of phase corresponds to a unique pair of message bits.
For example:
Phase Message 0 00
π/2 01
π 11
3π/2 10
Table (1.6) QPSK output phases

Note that : it is better to arrange the states with Gray Coding , this makes each
adjacent symbol only differs by one bit to minimize the bit error rate (BER).
1.5.4.1 Signal Equation
The QPSK signal for this set of symbol states may be defined as:
𝑆𝑄𝑃𝑆𝐾 𝑡 = 2𝐸𝑠
𝑇𝑠 cos[2𝜋𝑓𝑐𝑡 + 𝑖 − 1
𝜋
2] 0 ≤ 𝑡 ≤ 𝑇𝑠 𝑖 = 1,2,3,4. eqn (1.52)
Where TS is the symbol duration and is equal to twice the bit period Tb.
Using trigonometric identities: cos(x+y) = cos x cos y – sin x sin y
𝑆𝑄𝑃𝑆𝐾 𝑡 = 2𝐸𝑠
𝑇𝑠 cos[ 𝑖 − 1
𝜋
2] cos(2𝜋𝑓𝑐𝑡) −
2𝐸𝑠
𝑇𝑠 sin[ 𝑖 − 1
𝜋
2] sin(2𝜋𝑓𝑐𝑡)
eqn (1.53)
If the basis functions are:
𝜙1 𝑡 = 2
𝑇𝑠 cos(2𝜋𝑓𝑐𝑡) , 𝜙2 𝑡 =
2
𝑇𝑠sin(2𝜋𝑓𝑐𝑡)
Then the 4 signals in the set can be expressed in the terms of the basis functions as:
𝑆𝑄𝑃𝑆𝐾 𝑡 = 𝐸𝑠 cos 𝑖 − 1 𝜋
2 𝜙1 𝑡 – 𝐸𝑠 sin 𝑖 − 1
𝜋
2 𝜙2 𝑡 eqn (1.54)
𝑖 = 1,2,3,4
1.5.4.2 Constellation Diagram and probability of error
Based on this representation the QPSK signal can be depicted using a two
dimensional constellation diagram with four points as shown:
Figure (1.34) (a) QPSK constellation where the carrier phases are 0, π/2 , π,3π/2
(b) QPSK constellation where the carrier phases are π/4, 3π/4 ,5π/4,7π/4

From the constellation diagram, it can be seen that the distance between two adjacent
points in the constellation is 2𝐸𝑆 .
Since each symbol corresponds to two bits, then ES=2Eb, then the distance between
two adjacent points in the constellation is 2 𝐸𝑏 .
Then the average probability of bit error in AWGN channel:
𝑃𝑒 = 𝑄 2𝐸𝑏
𝑁𝑜 =
1
2𝑒𝑟𝑓𝑐
𝐸𝑏
𝑁𝑜 eqn (1.55)
Note that
QPSK has the same probability of bit error as BPSK, but twice as much data
can be sent in the same bandwidth.
Thus compared to BPSK, QPSK provides twice the spectral efficiency with
exactly the same power efficiency.
Similar to BPSK, QPSK can also be differentially encoded to allow non-
coherent detection.
1.5.4.3 Spectrum and bandwidth of QPSK signal:
The Null to null RF bandwidth is equal to the bit rate.
BW of QPSK= Rb =Half BW of BPSK
Figure (1.35) QPSK spectrum and bandwidth

1.5.4.4 QPSK Transmitter:
Figure (1.36) QPSK modulator
The unipolar binary message stream has bit rate Rb and is first converted into
a bipolar non return to zero (NRZ) sequence using a unipolar to bipolar
converter.
The data sequence is separated by the serial-to-parallel converter (S/P) to
form the odd numbered bit sequence for I-channel (cosine) and the even
numbered bit sequence for Q-channel (sine).
Next the odd-numbered-bit pulse train is multiplied to cos 2π fct and the even-
numbered-bit pulse train is multiplied to sin 2π fct.
It is clear that the I-channel and Q-channel signals are BPSK signals with
symbol duration of 2Tb. Finally a summer adds these two waveforms together
to produce the final QPSK signal.
The BPF at the output of the modulator confines the power spectrum of the
QPSK signal within the allocated band, this prevents spill-over of signal
energy into adjacent channels.
1.5.4.5 QPSK Receiver:
Figure (1.37) QPSK demodulator

The frontend bandpass filter removes out -of -band noise and adjacent channel
interference.
The filtered output is split into two parts , each part is coherently demodulated
using the in-phase and quadrature carriers which are recovered from the
received signal using carrier recovery circuit.
The outputs of the demodulators are passed through decision circuits which
generate the in-phase and quadrature binary streams.
The two components are then multiplexed to reproduce the original binary
sequence.
1.5.5 Offset Quadrature phase shift keying (OQPSK)
Offset Quadrature phase-shift keying (OQPSK) is a variant of phase-shift keying
modulation using 4 different values of the phase to transmit as QPSK.
Taking four values of the phase (two bits) at a time to construct a QPSK symbol
can allow the phase of the signal to jump by as much as 180° at a time.
The amplitude of a QPSK signal is ideally constant. However, when QPSK
signals are pulse shaped, they lose the constant envelope property. The occasional
phase shift of π radians can cause the signal envelope to pass through zero for just
an instant. Any kind of hard limiting or nonlinear amplification of the zero-
crossings brings back the filtered side lobes since the fidelity of the signal at small
voltage levels is lost in transmission. The prevent the regeneration of side lobes
and spectral widening; it is imperative that QPSK signals be amplified only using
linear amplifiers, which are less efficient. A modified form of QPSK, called offset
QPSK (OQPSK) or staggered QPSK is less susceptible to these deleterious effects
and supports more efficient amplification.
By offsetting the timing of the odd and even bits by one bit-period, or half a
symbol-period, the in-phase and quadrature components will never change at the
same time.
This will limit the phase-shift to no more than 90° at a time, this yields much
lower amplitude fluctuations than non-offset QPSK and is sometimes preferred in
practice.
Figure (1.38) QPSK and OQPSK phase transitions

The above figure shows the difference in the behavior of the phase between
ordinary QPSK and OQPSK. It can be seen that in the first plot (ordinary QPSK)
the phase can change by 180° at once, while in OQPSK the changes are never
greater than 90°. The following figure shows the even and odd bit streams, mI (t)
and mQ(t) and the offset in their relative alignment by one bit period (half-symbol
period):
Figure (1.39) OQPSK generation
Due to the time alignment of mI (t) and mQ (t) in standard QPSK, phase transitions
occur only once every Ts = 2Tb s, and will be a maximum of 180 degree if there
is a change in the value of both mI (t) and mQ (t) However, in OQPSK signaling,
bit transitions (and hence phase transitions) occur every Tb s.
Since the transitions instants of mI (t) and mQ (t) are offset, at any given time only
one of the two bit streams can change values. This implies that the maximum
phase shift of the transmitted signal at any given time is limited to ±90°.
Hence by switching phases more frequently (i.e., every Tb s instead of 2Tbs)
OQPSK signaling eliminates 180° phase transitions.
Since 180° phase transitions have been eliminated, bandlimiting of (i.e., pulse
shaping) OQPSK signals does not cause the signal envelope to go to zero.
Obviously, there will be some amount of ISI caused by the bandlimiting process,
especially at the 90 degree phase transition points. But the envelope variations are
considerably less, and hence hard limiting or nonlinear amplification of OQPSK
signals does not regenerate the high frequency side lobes as much as in QPSK.
Thus, spectral occupancy is significantly reduced, while permitting more efficient
RF amplification.

The modulated signal is shown in the figure below for a short segment of a
random binary data-stream:
Figure (1.40) OQPSK modulated signal
Note that half symbol-period offset between the two component waves.
The spectrum of an OQPSK signal is identical to that of a QPSK signal,
hence both signals occupy the same bandwidth. The staggered alignment of the
even and odd bit streams does not change the nature of the spectrum. OQPSK
retains its band limited nature even after nonlinear amplification, and therefore is
very attractive for mobile communication systems where bandwidth efficiency
and efficient nonlinear amplifiers are critical for low power drain. Further,
OQPSK signals also appear to perform better than QPSK in the presence of phase
jitter due to noisy reference signals at the receiver
1.5.6 π / 4–QPSK
The π/4 shifted QPSK modulation is a quadrature phase shift keying technique
which offers a compromise between OQPSK and QPSK in terms of the allowed
maximum phase transitions. It may be demodulated in a coherent or noncoherent
fashion. In π/4 QPSK, the maximum phase change is limited to ± 135° as
compared to 180° for QPSK and 90o for OQPSK. Hence, the bandlimited π/4
QPSK signal preserves the constant envelope property better than bandlimited
QPSK, but is more susceptible to envelope variations than OQPSK.
An extremely attractive feature of π/4 QPSK is that it can be noncoherently
detected, which greatly simplifies receiver design. Further, it has been found that
in the presence of in multipath spread and fading, π/4 QPSK performs better than
OQPSK . Very often, π/4 QPSK signals are differentially encoded to facilitate
easier implementation of differential detection or coherent demodulation with
phase ambiguity in the recovered carrier. When differentially encoded π/4 QPSK
is called π/4 DQPSK.

π / 4–QPSK uses two identical constellations which are rotated by 45° (π / 4
radians, hence the name) with respect to one another. Usually, either the even or
odd data bits are used to select points from one of the constellations or the other
bits select points from the other constellation. This also reduces the phase-shifts
from a maximum of 180°, but only to a maximum of 135° and so the amplitude
fluctuations of π / 4–QPSK are between OQPSK and non-offset QPSK.One
property this modulation scheme possesses is that if the modulated signal is
represented in the complex domain, it does not have any paths through the origin.
In other words, the signal does not pass through the origin. This lowers the
dynamical range of fluctuations in the signal which is desirable in
communications.
π/4 QPSK modulator, signaling points of the modulated signal are selected from
two QPSK constellations which are shifted by π/4 with respect to each other. The
figure shows the two constellations along with the combined constellation where
the links between two signal points indicate the possible phase transitions.
Switching between two constellations, every successive bit ensures that there is at
least a phase shift which is an integer multiple of π/4 radians between successive
symbols. This ensures that there is a phase transition for every symbol, which
enables a receiver to perform timing recovery and synchronization.
Phase Information bits mI,mQ
π/4 11
3π/4 01
-3π/4 00
-π/4 10
Table (1.7): Carrier phase shifts corresponding to various input bit pairs.
_____________________________________________________________________
Figure (1.41) Constellation diagram of π/4 QPSK signal (a) possible states of 𝜃𝑘 wken 𝜃𝑘−1 = 𝑛𝜋/4 (b) possible states when 𝜃𝑘−1 = 𝑛𝜋/2 (c) all possible states

1.5.6.1 Example Sketch the modulated symbols for the input bit stream: 11000110
_____________________________________________________________________
Figure (1.42) constellation diagram of π/4 QPSK
The modulated signal is shown below for a short segment of a random binary data-
stream:
Figure (1.43) modulated signal when 11000110 is transmitted
Note that: Successive symbols are taken from the two constellations shown in the
diagram. Thus, the first symbol (1 1) is taken from the 'blue' constellation and the
second symbol (0 0) is taken from the 'green' constellation.
1.5.6.2 π/4 QPSK Transmission Techniques A block diagram of a generic π/4 QPSK transmitter is shown in Figure.
Figure (1.44) π/4 QPSK transmitter

The input bit stream is partitioned by a serial-to-parallel (S/P) converter into two
parallel data streams mIk and mQk each with a symbol rate equal to half that of the
incoming bit rate. The Kth
in-phase and quadrature pulses, Ik and Qk are produced
at the output of the signal mapping circuit over time kT ≤ t ≤ (k + 1)T and are
determined by their previous values, Ik -1 and Qk -1 as well as θk which itself is a
function of ϕk which is a function of the current input symbols mIk and mQk. Ik
and Qk represent rectangular pulses over one symbol duration having amplitudes
given by:
𝐼𝑘 = cos 𝜃𝑘 = 𝐼𝑘−1 cos 𝜙𝑘 − 𝑄𝑘−1 sin 𝜙𝑘 eqn (1.56)
𝑄𝑘 = sin 𝜃𝑘 = 𝐼𝑘−1 sin 𝜙𝑘 + 𝑄𝑘−1 cos 𝜙𝑘 eqn (1.57)
Where 𝜃𝑘 = 𝜃𝑘−1 + 𝜙𝑘 eqn(1.58)
Just as in a QPSK modulator, the in-phase and quadrature bit streams Ik and Qk are
then separately modulated by two carriers which are in quadrature with one
another, to produce the π/4 QPSK waveform given by:
𝑆𝜋
4−𝑄𝑃𝑆𝐾
𝑡 = 𝐼 𝑡 cos 𝜔𝑐𝑡 − 𝑄(𝑡) sin 𝜔𝑐𝑡
Where
𝐼 𝑡 = 𝐼𝑘𝑁−1𝑘=0 𝑃 𝑡 − 𝐾𝑇𝑠 −
𝑇𝑠
2 = cos 𝜃𝑘
𝑁−1𝑘=0 𝑃 𝑡 − 𝐾𝑇𝑠 −
𝑇𝑠
2 eqn(1.59)
𝑄 𝑡 = 𝑄𝑘𝑁−1𝑘=0 𝑃 𝑡 − 𝐾𝑇𝑠 −
𝑇𝑠
2 = sin 𝜃𝑘
𝑁−1𝑘=0 𝑃 𝑡 − 𝐾𝑇𝑠 −
𝑇𝑠
2 eqn(1.60)
Both Ik and Qk are usually passed through raised cosine roll off pulse shaping
filters before modulation, in order to reduce the bandwidth occupancy. The
function P(t) in equations (1.59),(1.60) corresponds to the pulse shape, and Ts is
the symbol period. Pulse shaping also reduces the spectral restoration problem
which may be significant in fully saturated, nonlinear amplified systems.
It should be noted that the values of Ik and Qk and the peak amplitude of
the waveforms I(t) and Q(t) can take one of the five possible values 0, +1, -1,
+1/ 2 , -1/ 2 .
From the above discussion it is clear that the information in a π/4 QPSK signal is
completely contained in the phase difference φk of the carrier between two
adjacent symbols. Since the information is completely contained in the phase
difference, it is possible to use noncoherent differential detection even in the
absence of differential encoding.

1.5.6.3 π/4 QPSK Detection Techniques Due to ease of hardware implementation, differential detection is often employed
to demodulate π/4 QPSK signals. In an AWGN channel, the BER performance of
a differentially detected π/4 QPSK is about 3 dB inferior to QPSK, while
coherently detected π/4 QPSK has the same error performance as QPSK.
In low bit rate, fast Rayleigh fading channels, differential detection offers a
lower error floor since it does not rely on phase synchronization.
There are various types of detection techniques that are used for the detection of
π/4QPSK signals. They include baseband differential detection, IF differential
detection, and FM discriminator detection. While both the baseband and IF
differential detector determines the cosine and sine functions of the phase
difference, and then decides on the phase difference accordingly, the FM
discriminator detects the phase difference directly in a noncoherent manner.
Interestingly, simulations have shown that all 3 receiver structures offer very
similar bit error rate performances, although there are implementation issues
which are specific to each technique.
1.5.6.3.1 Baseband Differential Detection Figure (1.45) shows a block diagram of a baseband differential detector. The
Incoming π/4 QPSK signal is quadrature demodulated using two local oscillator
signals that have the same frequency as the unmodulated carrier at the transmitter,
but not necessarily the same phase ϕk = tan−1 Qk
Ik is the phase of the carrier due to
the kth data bit, the output wk and zk from the two low pass filters in the in-phase
and quadrature arms of the demodulator can be expressed as:
𝑊𝑘 = cos 𝜙𝑘 − 𝛾 eqn (1.61)
𝑧𝑘 = sin 𝜙𝑘 − 𝛾 eqn(1.62)
Figure (1.45) Block diagram of a baseband differential detector.

where γ is a phase shift due to noise, propagation, and interference. The phase γ is
assumed to change much slower than φk so it is essentially a constant. The two
sequences wk and zk are passed through a differential decoder which operates on the
following rule:
𝑥𝑘 = 𝑊𝑘𝑊𝑘−1 + 𝑧𝑘𝑧𝑘−1 eqn(1.63)
𝑦𝑘 = 𝑧𝑘𝑊𝑘−1 + 𝑤𝑘𝑧𝑘−1 eqn(1.64)
The output of the differential decoder can be expressed as
𝑥𝑘 = cos 𝜙𝑘 − 𝛾 cos 𝜙𝑘−1 − 𝛾 + sin 𝜙𝑘 − 𝛾 sin 𝜙𝑘−1 − 𝛾 =cos 𝜙𝑘 − 𝜙𝑘−1
𝑦𝑘 = sin 𝜙𝑘 − 𝛾 cos 𝜙𝑘−1 − 𝛾 + cos 𝜙𝑘 − 𝛾 sin 𝜙𝑘−1 − 𝛾 =sin 𝜙𝑘 − 𝜙𝑘−1
eqn (1.65)
The output of the differential decoder is applied to the decision circuit, which uses Table
(1.7) to determine:
𝑆𝐼 = 1, 𝑖𝑓 𝑥𝑘 > 0 𝑜𝑟 𝑆𝐼 = 0, 𝑖𝑓 𝑥𝑘 < 0
𝑆𝑄 = 1, 𝑖𝑓 𝑦𝑘 > 0 𝑜𝑟 𝑆𝑄 = 0, 𝑖𝑓 𝑦𝑘 < 0
Where SI and SQ are the detected bits in the in-phase and quadrature arms,
respectively.
1.5.6.3.2 IF Differential Detector The IF differential detector shown in Figure (1.46) avoids the need for a local
oscillator by using a delay line and two phase detectors. The received signal is
converted to IF and is bandpass filtered. The bandpass filter is designed to match
the transmitted pulse shape, so that the carrier phase is preserved and noise power
is minimized. To minimize the effect of ISI and noise, the bandwidth of the filters
are chosen to be 0.57/ Ts .The received IF signal is differentially decoded using a
delay line and two mixers. The bandwidth of the signal at the output of the
differential detector is twice that of the baseband signal at the transmitter end.
Figure (1.46) Block diagram of an IF differential detector for π/4 QPSK.

1.5.6.3.3 FM Discriminator Figure (1.47) shows a block diagram of an FM discriminator detector for
π/4QPSK. The input signal is first filtered using a bandpass filter that is matched
to the transmitted signal. The filtered signal is then hard limited to remove any
envelope fluctuations. Hard limiting preserves the phase changes in the input
signal and hence no information is lost. The FM discriminator extracts the
instantaneous frequency deviation of the received signal which, when integrated
over each symbol period gives the phase difference between two sampling
instants. The phase difference is then detected by a four level threshold
comparator to obtain the original signal. The phase difference can also be detected
using a modulo-2π phase detector. The modulo-2π phase detector improves the
BER performance and reduces the effect of click noise.
Figure(1.47) FM discriminator detector for π/4 DQPSK demodulation.
1.6 FREQUENCY SHIFT KEYING FSK
FSK (Frequency Shift Keying) is also known as frequency shift modulation
and frequency shift signaling. Frequency Shift Keying is a data signal converted into a
specific frequency or tone in order to transmit it over wire, cable, optical fiber or
wireless media to a destination point.
The history of FSK dates back to the early 1900s, when this technique was
discovered and then used to work alongside teleprinters to transmit messages by radio
(RTTY).
But FSK, with some modifications, is still effective in many instances including the
digital world where it is commonly used in conjunction with computers and low speed
modems.
In fact, the contributions of FSK are much more far reaching. For example, the
principle of FSK has laid the path to the development of other similar techniques such
as the Audio Frequency Shift Keying (AFSK) and Multiple Frequency Shift Keying
(MFSK) just to name a few.
In Frequency Shift Keying, the modulating signals shift the output frequency between
predetermined levels.

Technically FSK has two classifications, the non-coherent and coherent FSK.
In non-coherent FSK, the instantaneous frequency is shifted between two discrete
values named mark and space frequency, respectively. On the other hand, in coherent
Frequency Shift Keying or binary FSK, there is no phase discontinuity in the output
signal.
In this digital era, the modulation of signals are carried out by a computer,
which converts the binary data to FSK signals for transmission, and in turn receives
the incoming FSK signals and converts it to corresponding digital low and high, the
language the computer understands best.
The basic principle of Frequency Shift Keying is at least a century old. Despite
its age, FSK has successfully maintained its use during more modern times and has
adapted well to the digital domain, and continues to serve those that need to transfer
data via computer, cable, or wire. There is no doubt that FSK will be around as long
as there is a need to transmit information in a highly effective and affordable manner.
1.6.1Binary phase shift keying (BFSK) In binary frequency shift keying (BFSK), the frequency of a constant amplitude
carrier signal is switched between two values according to the two possible message
states (High and Low), corresponding to a binary 1 or 0.
A 0 is transmitted by a pulse of frequency 𝜔𝑐 + 𝛥𝜔/2 , and 1 is transmitted by a
pulse of frequency 𝜔𝑐 − 𝛥𝜔/2 such a waveform may be considered to be two
interleaved ASK waves.
An FSK signal described as mentioned may be represented as:
𝑠0 𝑡 = 2𝐸𝑏
𝑇𝑏cos ωc +
𝛥ω
2 𝑡 0 ≤ 𝑡 ≤ 𝑇𝑏 (𝑏𝑖𝑛𝑎𝑟𝑦 0) eqn(1.66)
𝑠1 𝑡 = 2𝐸𝑏
𝑇𝑏 cos(ωc −
𝛥ω
2)𝑡 0 ≤ 𝑡 ≤ 𝑇𝑏 (𝑏𝑖𝑛𝑎𝑟𝑦 1) eqn(1.67)
Where Δω is a constant offset from the nominal carrier frequency.
The most important factor to keep in mind when designing FSK is to keep the
frequency of the different symbols orthogonal to minimize the correlation between
the two symbols to the zero assuming perfect synchronization of receiver oscillators.
To achieve this we must do the correlation function between to transmitted symbols
and get the conditions to achieve the orthogonality
𝐸 = 𝑠0 𝑡 𝑠1 𝑡 𝑑𝑡𝑇𝑏
0
=2𝐸𝑏
𝑇𝑏 cos ωc +
𝛥ω
2
𝑇𝑏
0𝑡 cos ωc −
𝛥ω
2 𝑡 𝑑𝑡
=𝐸𝑏
𝑇𝑏
cos 𝛥ωt 𝑑𝑡 + cos 2ωct 𝑑𝑡𝑇𝑏
0
𝑇𝑏
0
= 𝐸𝑏 𝑠𝑖𝑛 𝛥𝜔 𝑇𝑏
𝛥𝜔 𝑇𝑏+
𝑠𝑖𝑛 2𝜔𝑐 𝑇𝑏
2𝜔𝑐 𝑇𝑏
eqn (1.68)

In practice 𝜔𝑐𝑇𝑏 ≪ 1, and the second term on the right hand side can be ignored
therefore
𝐸 = 𝐸𝑏 𝑠𝑖𝑛𝑐 𝛥𝜔 𝑇𝑏 eqn(1.69)
in order for E = 0 from the previous equation:
Δf = n/2Tb eqn(1.70)
where n is any integer.
Larger Δf means wider separation between signaling frequencies.
Thus binary FSK system is characterized by having a signal space that is two
dimensional with two message point as shown in figure (1.48)
1.6.1.1 Binary FSK Modulator To generate a binary FSK signal we may use the scheme shown in fig 1.49.the
input binary sequence is represented in its on-off form, with symbol 1 represented by
constant amplitude of 𝐸𝑏 volts and symbol 0 represented by zero volts. By using an
inverter in the lower channel in fig 1.49, we in fact make sure that when we have
symbol 1 at the input, the oscillator with frequency 𝑓1in the upper channel is switched
on while the oscillator with frequency 𝑓2in the lower channel is switched off, with the
result that frequency 𝑓1is transmitted. Conversely, when we have symbol 0 at the
input, the oscillator in the upper channel is switched off, and the oscillator in the
lower channel is switched on, with the result that frequency 𝑓2is transmitted. The two
frequencies 𝑓1and 𝑓2are chosen integer multiple of the bit rate 1/𝑇𝑏 which we
previously proved to be orthogonal.
In this transmitter we assume that the two oscillators are synchronized, so that
their outputs satisfy the requirements of the two orthogonal basis
functions𝑠1 𝑡 & 𝑠0 𝑡 . We may use a single keyed (voltage controlled) oscillator. In
either case, the frequency of the modulated wave is shifted with a continues phase, in
accordance with the input binary wave that is to say, phase continuity is always
maintained, including the inter-bit switching time. We refer to this digital modulation
as continues-phase frequency-shift keying (CPFSK).
Decision
boundary 𝛷2
𝑧1
Region
𝑧2
Region
Figure 1.48 signal space diagram for binary FSK system
Forward hint We can think in the different orthogonal
carriers of the FSK signal as a
multidimensional system with each carrier represents an axis in this system.
In binary FSK we only have two
dimensions.
The M-ary FSK is built on this idea
𝛷1
𝐸𝑏
𝐸𝑏

_____________________________________________________________________
Figure (1.50) shows generating a FSK signal, there are four signals first the binary
one second the 1 signal with lower frequency third the 0 signal with the higher
frequency and last the final FSK signal.
_______________________________________________________
2
𝑇𝑏cos(2 𝜋 𝑓1𝑡)
2
𝑇𝑏cos(2 𝜋 𝑓1𝑡)
Binary
FSK
wave
+
+
Inverter
m (t)
𝑚 (𝑡)
Binary wave
(on-off
signaling
form)
Fig 1.49 Block diagram for binary FSK transmitter
Figure 1.50 FSK signal

1.6.1.2 Power Spectral Density
Now we proceed to find the power spectrum of the FSK signal. We expand the FSK
signal as following:
𝑠 𝑡 = 𝐴 cos 2𝜋 𝑓𝑐 + 𝑎𝑘 1
2𝑇 𝑡
= 𝐴 cos 𝑎𝑘
𝜋𝑡
𝑇 cos 2𝜋𝑓𝑐𝑡 −𝐴 sin 𝑎𝑘
𝜋𝑡
𝑇 sin 2𝜋𝑓𝑐𝑡
= 𝐴 cos(𝜋𝑡
𝑇) cos 2𝜋𝑓𝑐𝑡 − 𝐴 𝑎𝑘 sin(
𝜋𝑡
𝑇) sin 2𝜋𝑓𝑐𝑡
eqn(1.71)
Where the last expression is derived using the fact that ak= ±1. The in phase
component
A cos(πt
T) is independent of the data. The quadrature component A ak sin (
πt
T) is
directly related to data. The in phase and quadrature components are independent of
each other.
𝑆 𝑓 = 𝐼 𝑓 + 𝑄(𝑓) eqn(1.72)
Where I f is the in phase component and Q f is the quadrature phase component.
S f can be found easily since the in phase component is independent of data. It is
defined on the entire time axis. Thus:
𝐼 𝑓 = ℱ 𝐴 𝑐𝑜𝑠(𝜋𝑡
𝑇)
2= 𝐴2 𝛿 𝑓 −
1
2 𝑇 + 𝛿(𝑓 +
1
2 𝑇) eqn(1.73)
Where stands for Fourier transform. It is seen that the spectrum of the in phase part
of the FSK signal are two delta functions.
𝑄 𝑓 = 1
2 ℱ 𝐴 𝑠𝑖𝑛(
𝜋𝑡
𝑇)
2
0 ≤ 𝑡 ≤ 𝑇
=1
𝑇
2𝐴𝑇 cos 𝜋𝑇𝑓
𝜋 1− 2𝑇𝑓 2
2
eqn (1.74)
The complete baseband PSD of the binary FSK signal is the sum of I(f) & Q(f) :
𝑆(𝑓) = 𝐴2 𝛿 𝑓 −1
2 𝑇 + 𝛿(𝑓 +
1
2 𝑇) +
1
𝑇
2𝐴𝑇 cos 𝜋𝑇𝑓
𝜋 1− 2𝑇𝑓 2
2
eqn(1.75)

1.6.1.3 Coherent demodulation and error performance
In order to detect the original binary sequence given the noisy received wave x(t), we
may use the receiver shown in Fig 1.5.5, it consist of two correlators with common
input, which are supplies with local generated coherent reference signal
Φ1 t & Φ2 t . The correlator outputs are then subtracted, one from the other, and the
resulting difference, l, is compared with a threshold of zero volts. If l > 0, the
receiver decides in favor of 1. On the other hand, if l < 0, it decides in favor of 0.
To study the coherent demodulator error performance of the transmitted FSK signal
we need to look at fig 1.51 where the distance between the two message points is
equal to 2Eb and the error probelity is driven from the relation
𝑃𝑒 = 𝑃 𝑙 > 0 𝑠𝑦𝑚𝑏𝑜𝑙 0 𝑤𝑎𝑠 𝑠𝑒𝑛𝑡) + 𝑃 𝑙 < 0 𝑠𝑦𝑚𝑏𝑜𝑙 1 𝑤𝑎𝑠 𝑠𝑒𝑛𝑡)
We can drive that Pe 0 & Pe (1) have the same value and it is equal to :
𝑃𝑒(0 1 =1
2𝑒𝑟𝑓𝑐(
𝐸𝑏
2 𝑁0) eqn(1.76)
Averaging Pe 0 & Pe (1), we find that the average probability of symbol error for
coherent binary FSK is:
𝑃𝑒 =1
2𝑒𝑟𝑓𝑐
𝐸𝑏
2 𝑁0 eqn (1.77)
1.6.1.4 Noncoherent demodulation and error performance For the noncoherant detection, the receiver consists of a pair of matched filters
followed by envelope detectors, as in Fig 1.52 the filter in the upper path of the
receiver is matched to the first symbol signal with frequency 𝑓1and the filter in the
upper path of the receiver is matched to the first symbol signal with frequency𝑓2. The
resulting envelope detector outputs are sampled at 𝑡 = 𝑇𝑏 and their values are
compared. The envelope sample of the upper and lower paths are shown as 𝑙1& 𝑙2
respectively; then, if 𝑙1 > 𝑙2, the receiver decides in favor of symbol 1, and if 𝑙1 < 𝑙2,
the receiver decides in favor of symbol 0.
𝑑𝑡𝑇𝑏
0
𝑑𝑡𝑇𝑏
0
+
−
Decision
device
𝑐𝑜𝑜𝑠𝑒 1 𝑖𝑓 𝑙 > 0
𝑐𝑜𝑜𝑠𝑒 0 𝑖𝑓 𝑙 < 0
Fig 1.51 Block diagram for coherent binary FSK receiver

The noncoherant binary FSK described is a special case of noncoherant orthogonal
modulation with:
𝑇 = 𝑇𝑏
And
𝐸 = 𝐸𝑏
Where 𝑇𝑏 is the bit duration and 𝐸𝑏 is the signal energy per bit. Hence, the 𝑃𝑒 can be
proven to be
𝑃𝑒 = 1
2 exp(−
𝐸𝑏
2𝑁0) eqn(1.78)
1.6.2 M-ARY FSK
In an M-ary FSK scheme, the transmitted signals are defined by
𝑠𝑖 𝑡 = 2𝐸
𝑇cos
𝜋
𝑇 𝑛𝑐 + 𝑖 𝑡 𝑜 ≤ 𝑡 ≤ 𝑇 eqn(1.79)
Where 𝑖 = 1,2, … , 𝑀and the carrier frequency 𝑓𝑐 = 𝑛𝑐/2𝑇 for some fixed integer 𝑛𝑐 .
The transmitted signals are equal duration T and have equal energy E. Since the
individual signal frequencies are separated by 1/2T hertz, the signals describes above
are as proved orthogonal, that is:
𝑠𝑖 𝑡 𝑠𝑗 𝑡 𝑑𝑡 = 0 𝑖 ≠ 𝑗𝑇
0 eqn(1.80)
For coherent M-ary FSK, the optimum receiver consists of band of M correlators or
matched filters, with the wanted signals providing the pertinent references. At the
sampling times t=kT, the receiver makes decisions based on the largest matched filter
output.
2
𝑇𝑏cos(2𝜋𝑓1𝑡)
0 ≤ 𝑡 ≤ 𝑇𝑏
Filter matched to
2
𝑇𝑏cos(2𝜋𝑓2𝑡)
0 ≤ 𝑡 ≤ 𝑇𝑏
Filter matched to
Envelope
detector
Envelope
detector
Comparison
device
if 𝑙1 > 𝑙2 𝑐𝑜𝑜𝑠𝑒 1
if 𝑙1 < 𝑙2 𝑐𝑜𝑜𝑠𝑒 0
Fig 1.52 Noncoherant
receiver for detection
of binary FDK signals

The M-ary FSK can be considered multidimensional system with M orthogonal axis.
Giving the probability of error parameters of the M-ary FSK as following:
Average symbol error probability:
eqn(1.81)
Average bit error probability:
eqn(1.82)
Asymptotic power efficiency:
eqn(1.83)
Shannon bandwidth:
eqn(1.84)
Bandwidth efficiency:
eqn(1.86)
Fig 1.53

The bit error rate of different M’s for the M-ary FSK is shown in Fig 1.53, it can be
shown from the Fig that the more M the lower level of probability of error for the
same SNR
Coherent detection of M-ary FSK requires the use of exact phase references, the
provision for which at the receiver can be costly and difficult to maintain. We may
avoid the need for such a provision by using noncoherant detection, which result in a
slightly inferior performance. In a noncoherant receiver, the individual matched filters
are followed by envelope detectors that destroy the phase information.
The probability of symbol error of the noncoherant detection of M-ary FSK:
𝑃𝑒 = 𝑀−1
2 exp(−
𝐸
2𝑁0) eqn(1.86)
1.6.3 Minimum shift keying MSK In the coherent detection of binary FSK signal described before, the phase
information contained in the receiver signal was not fully exploited, other than to
provide for synchronization of the receiver to the transmitter. We now show that by
proper utilization of the phase when performing detection, it is possible to improve
the noise performance of the receiver significantly. This improvement is, however,
achieved at the expense of increasing receiver complexity.
Consider a continues-phase frequency-shift keying (CPFSK) signal, which is defined
for interval 0 ≤ 𝑡 ≤ 𝑇𝑏 , as follows:
𝑠 𝑡 =
2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓1𝑡 + 𝜃 0 𝑓𝑜𝑟 𝑠𝑦𝑚𝑜𝑙 1
2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓2𝑡 + 𝜃 0 𝑓𝑜𝑟 𝑠𝑦𝑚𝑜𝑙 0
eqn(1.87)
Where 𝐸𝑏 is the transmitted signal energy per bit, and 𝑇𝑏 is the bit duration. The
phase𝜃(0), denoting the value of phase at time𝑡 = 0, depends on the past history of
the modulation process. The frequency 𝑓1 & 𝑓2are sent in response to binary symbol 1 and 0 appearing at the modulation input, respectively. Another useful way of representing the CPFSK signal s(t) is to express it in the conventional form of an angle-modulation waves follows
𝑠 𝑡 = 2𝐸𝑏
𝑇𝑏cos 2𝜋𝑓𝑐𝑡 + 𝜃 𝑡 eqn(1.88)
The phase 𝜃 𝑡 is a continues function of time, this leads to the modulated wave s(t)
itself to be continues all the time including the inter-bit switching times.
𝑓𝑐 =1
2(𝑓1 + 𝑓2) eqn(1.89)
The phase 𝜃 𝑡 of CPFSK signal increases or decreases linearly with time during each
bit period of 𝑇𝑏 seconds, as shown by:
𝜃 𝑡 = 𝜃 0 ± 𝜋
𝑇𝑏 𝑡 0 ≤ 𝑡 ≤ 𝑇𝑏 eqn(1.90)

Where the plus sign corresponds to sending symbol 1, and mines sign corresponds to
sending symbol 0. The parameter h is defined by:
= 𝑇𝑏(𝑓1 − 𝑓2) eqn(1.91)
We refer to h as the deviation ratio, measured with respect to the bit rate 1/𝑇𝑏 . At time
t = 𝑇𝑏
𝜃 𝑇𝑏 − 𝜃 0 = 𝜋 𝑓𝑜𝑟 𝑠𝑦𝑚𝑏𝑜𝑙 1−𝜋 𝑓𝑜𝑟 𝑠𝑦𝑚𝑏𝑜𝑙 0
eqn(1.92)
That is to say, the sending of symbol 1 increases the phase of CPFSK s(t) by πh ,
whereas the sending of symbol 0 reduces it by an equal amount
This can be cleared using the phase trellis method
Using some mathematical operations we can express the CPFSK s(t) in terms of its in-
phase and quadrature components as follows:
eqn(1.93)
So we have the following four cases:
1. The phase 𝜃 0 = 0 and 𝜃 𝑇𝑏 = π/2, corresponding to transmission of symbol
1.
2. The phase 𝜃 0 = 0 and 𝜃 𝑇𝑏 = π/2, corresponding to transmission of symbol
0.
3. The phase 𝜃 0 = 0 and 𝜃 𝑇𝑏 = -π/2 (or, equivalently, 3 π /2, modulo 2 π),
corresponding to transmission of symbol 1.
4. The phase 𝜃 0 = 0 and 𝜃 𝑇𝑏 = -π/2 (or, equivalently, 3 π /2, modulo 2 π),
corresponding to transmission of symbol 0.
5. This in turn means that the MSK signal itself can take one of four possible
forms, depending on the values 𝜃 0 and 𝜃 𝑇𝑏
Fig 1.54

This, in turn, means that the MSK signal itself may assume any one of four possible
forms, depending on the value of 𝜃 0 & 𝜃 𝑇𝑏
The appropriate form for the orthogonal basis function ∅1(𝑡) and ∅2(𝑡):
∅1 𝑡 = 2
Tbcos
𝜋
2𝑇𝑏𝑡 cos 2𝜋𝑓𝑐𝑡 − 𝑇𝑏 ≤ 𝑡 ≤ 𝑇𝑏
∅2 𝑡 = 2
𝑇𝑏sin
𝜋
2𝑇𝑏𝑡 sin 2𝜋𝑓𝑐𝑡 0 ≤ 𝑡 ≤ 2𝑇𝑏
Correspondingly, we may express the MSK signal in the form
𝑠 𝑡 = 𝑠1 ∅1 𝑡 + 𝑠2 ∅2 𝑡 0 ≤ 𝑡 ≤ 𝑇𝑏 Accordingly, the signal constellation for an MSK signal is two-dimensional, with four
message points, as shown in Fig 1.5.9
Figure (1.55) Constellation diagram for MSK signalIf we made a comparison between
the constellation of MSK and the QPSK signals we would notice that they have
identical format. Note, however, that the coordinates of the message points for the
QPSK signal are expressed in terms of signal energy per symbol, E, whereas for the
MSK signal they are expressed in terms of the signal energy per bit.

The basic difference between QPSK & MSK signals is in the choice of orthogonal
signals ∅1(𝑡) and ∅2(𝑡). For QPSK ∅1(𝑡) and ∅2(𝑡) are represented by a pair of
quadrature carriers, whereas for an MSK signal, they are represented by a pair of
sinusoidally modulated quadrature carriers.
To generate the signal described before of MSK we can use the following MSK
transmitter shown in Fig 1.57, the advantage of this modulator is that the signal
coherence and deviation ratio are largely unaffected by variation in the input data rate.
Fig 1.58 shows the block diagram of typical MSK receiver.
Fig 1.56 Sequence and waveforms for MSK signal
Fig 1.57 MSK modulator

Earlier we remarked that the MSK and QPSK signals have similar signal space
diagram. It follows, therefore, that for the case of AWGN channel, they have the same
forela for their average probability of error:
𝑃𝑒 = 𝑒𝑟𝑓𝑐( 𝐸𝑏
𝑁0) eqn(1.94)
This is much better than the ordinary FSK.
1.6.4 Gaussian minimum shift keying GMSK
Gaussian Minimum Shift Keying (GMSK) is a modification of MSK (i.e. CPFSK
with h = 1/2). A filter used to reduce the bandwidth of a baseband pulse train prior to
modulation is called a pre-modulation filter. The Gaussian pre-modulation filter
smoothes the phase trajectory of the MSK signal thus limiting the instantaneous
frequency variations. The result is an FM modulated signal with a much narrower
bandwidth. This bandwidth reduction does not come for free since the pre-modulation
filter smears the individual pulses in pulse train. As a consequence of this smearing in
time, adjacent pulses interfere with each other generating what is commonly called
inter-symbol interference or ISI. In the applications where GMSK is used, the trade-
off between power efficiency and bandwidth efficiency is well worth the cost.
There are two methods to generate GMSK, one is frequency shift keyed modulation,
the other is quadrature phase shift keyed modulation.
Fig 1.58 MSK Demodulator

The shaded areas in the two above figures have the same function. The GMSK VCO-
modulator architecture as shown in the first is simple but is not however, suitable for
coherent demodulation due to component tolerance problems. This method requires
that the frequency deviation factor of the VCO exactly equals 0.5, but the modulation
index of conventional VCO based transmitters drifts over time and temperature.
The implementation in the second employs a quadrature baseband process followed
by a quadrature modulator. With this implementation, the modulation index can be
maintained at exactly 0.5. This method is also cheaper to implement. Both methods
lead to the same GMSK modulated signal.
We are going to be looking at the second of these two methods that is we shall be
looking at a quadrature baseband processor followed by a quadrature modulator as
shown in the second.
The Gaussian low-pass filter has an impulse response given by the following equation
g t =1
2T Q 2πBb
t−T
2
ln 2 − Q 2πBb
t+T
2
ln 2 eqn(1.95)
Fig 1.59 GMSK implemented by Frequency Shift keying
modulation with FM-VCO.
Fig 1.60 GMSK implemented by a quadrature baseband
method.modulation with FM-VCO.

For
0 ≤ Bb𝑇 ≤ ∞
Recall the probability of error for plain MSK is given by
𝑃𝑒 = 𝑄( 2𝐸𝑏
𝑁0) eqn(1.96)
By comparing we can conclude that PeGMSK > Pe
FSK this arises from the trade off
between power and bandwidth efficient: GMSK achieves better bandwidth efficiency
than MSK at the expense of power efficiency.
Fig 1.61 The truncated and scaled impulse response of the Gaussian low-pass
filter.method.modulation with FM-VCO.

1.7 QUADRATURE AMPLITUDE MODULATION (QAM)
M-Ary PSK systems are consisted of fixed step phase shifts with constant
envelope. In a try to increase such system capacity, the constellation points will get
closer to each other increasing the bit error rate. A simple solution is to increase the
radius of the constellation points, but of course it’ll also increase the power used.
A new technique was developed to overcome that problem by making use of
available space inside the constellation circle.
This technique is called quadrature amplitude modulation as it combines with or
make use of both ASK and PSK.
As in Fig(1.62)-b is a constellation diagram showing 16-Ary QAM, it can be
represented as two quadrature carriers each is modulated with 4-level ASK.
1.7.1 Types of QAM:
1.7.1.1 Circular QAM:
Simply this type of QAM is considered as multi-level PSK, with phase off-set
to maximize the minimum Euclidian distance to obtain minimum average energy per
symbol.
𝑠𝑖 𝑡 = 2𝐸0
𝑇𝑎𝑖 . 𝒆
j(2𝜋𝑓𝑐𝑡+𝜃𝑗 ), 0 ≤ t ≤ Tb eqn(1.97)
Where 𝑎𝑖 is the normalized level, 𝜃𝑗 is the symbol’s phase.
_____________________________________________________________________
Figure (1.63) circular QAM
(a) (b)
Figure (1.62) showing 16-Ary PSK (a) crowded on the constellation circle and equivalent average power
16-Ary QAM (b) with constellation points distributed to make use of the same space

1.7.1.2 Rectangular QAM:
The general form of M-Ary QAM is defined by the transmitted signal:
𝑠𝑖 𝑡 = 2𝐸0
𝑇𝑎𝑖 cos 2𝜋𝑓𝑐𝑡 +
2𝐸0
𝑇𝑏𝑖 sin 2𝜋𝑓𝑐𝑡 , 0 ≤ t ≤ Tb eqn(1.98)
E0 is the energy of the signal with the lowest amplitude, ai and bi are a pair of
independent integers chosen to specify a certain constellation point, i є [-L+1 L-1],
where 𝐿 = 𝑀
𝑎𝑖 , 𝑏𝑖 =
(−𝐿 + 1, 𝐿 − 1) (−𝐿 + 3, 𝐿 − 1)(−𝐿 + 1, 𝐿 − 3) (−𝐿 + 3, 𝐿 − 3)
⋯(𝐿 − 1, 𝐿 − 1)(𝐿 − 1, 𝐿 − 3)
⋮ ⋱ ⋮(−𝐿 + 1, −𝐿 + 1) (−𝐿 + 3, −𝐿 + 1) ⋯ (𝐿 − 1, −𝐿 + 1)
eqn (1.99)
The rectangular QAM signal could be represented in terms of 2 independent
basis functions:
𝜑1 𝑡 = 2
𝑇cos 2𝜋𝑓𝑐𝑡 0 ≤ 𝑡 ≤ 𝑇 eqn(1.100)
, 𝜑2 𝑡 = 2
𝑇sin 2𝜋𝑓𝑐𝑡 0 ≤ 𝑡 ≤ 𝑇 eqn(1.101)
The coordinates of the ith message point are 𝑎𝑖 𝐸0 and 𝑏𝑖 𝐸0,
for example, for the 16-QAM with L = 4:
𝑎𝑖 , 𝑏𝑖 =
−3, +3 −1, +3−3, +1 −1, +1
+1, +3 +3, +3+1, +1 +3, +1
−3, −1 −1, −1−3, −3 −1, −3
+1, −1 +3, −1+1, −3 +3, −3
eqn (1.102)
The first rectangular QAM constellation usually encountered is 16-QAM, the
constellation diagram for which is shown here. A Gray coded bit-assignment is also
given. The reason that 16-QAM is usually the first is that a brief consideration reveals
that 2-QAM and 4-QAM are in fact binary phase-shift keying (BPSK) and quadrature
phase-shift keying (QPSK), respectively. Also, the error-rate performance of 8-QAM
is close to that of 16-QAM (only about 0.5dB better), but its data rate is only three-
quarters that of 16-QAM.
1.7.1.3 Circular or Rectangular 8-QAM?
When dealing with 8-Ary constellation, APK is preferable as it is space
efficient rather than QAM. In 16-Ary constellation, it’s more advisable to go to QAM
constellation as its more energy efficient, even some standards actually uses 16 APK
like V29.bis telephone standard to maximize the phase difference between points
having the same energy in the expense of increasing the amplitude levels. Also the
symmetry of rectangular QAM sometimes doesn’t suit the channel characteristics or
the detection process, and more, the designer wishes to put the constellation points
anywhere, from here came the APK.

_____________________________________________________________________
Figure (1.64) rectangular QAM versus APK
1.7.2 Probability of symbol error calculations:
As both in-phase and quadrature components are independent, probability of
correct detection is:
𝑃𝑐 = (1 − 𝑃𝑒′)2 eqn(1.103)
, where 𝑃𝑒′ is the probability of symbol error for one of the components.
Referring to PAM symbol error eqn, 𝑃𝑒′ could be written as:
𝑃𝑒′ = 1 −
1
𝐿 𝑒𝑟𝑓𝑐(
𝐸0
𝑁0) eqn(1.104)
The probability of symbol error for QAM is:
𝑃𝑒 = 1 − 𝑃𝑐 = 1 − (1 − 𝑃𝑒′)2 ≅ 2𝑃𝑒
′
, so 𝑃𝑒 = 2 1 −1
𝑀 𝑒𝑟𝑓𝑐
𝐸0
𝑁0 , but 𝐸𝑎𝑣 =
2(𝑀−1)𝐸0
3
So finally
𝑃𝑒 = 2 1 −1
𝑀 𝑒𝑟𝑓𝑐
3𝐸𝑎𝑣
2(𝑀−1)𝑁0 eqn(1.105)
APK (amplitude-phase keying): its constellation is simply multi level of
amplitudes. 8-QAM is considered the optimal constellation as it requires
least mean energy.
𝑃𝑠 < 𝑀 − 1 𝑄( 𝑑𝑚𝑖𝑛
2
2𝑁0) eqn(1.106)
The separation between each point having the same
magnitude is 45 degrees.
Figure (1.65) formulation of
probability of symbol error in
circular QAM

1.7.3 QAM modulation
___________________________________________________________
Figure (1.66) M-Ary QAM Modulator
Binary data are split into 2 parallel paths, in each path a number of bits 𝐿 = 𝑀 is
amplitude shift keyed to L levels then phase shift keyed using the 2 independent
carriers. Then the paths are combined again to form the M-Ary QAM signal.
1.7.4 QAM demodulation:
In QAM modulation, coherent and differentially coherent detection could be used as
for PSK systems, we shall concern with coherent detection.
Figure (1.67) M-Ary QAM Demodulator

0 50 100-5
0
5amp=4.2426, ph=-135
0 50 100-5
0
5amp=3.1623, ph=-161.5651
0 50 100-5
0
5amp=3.1623, ph=161.5651
0 50 100-5
0
5amp=4.2426, ph=135
0 50 100-5
0
5amp=3.1623, ph=-108.4349
0 50 100-5
0
5amp=1.4142, ph=-135
0 50 100-5
0
5amp=1.4142, ph=135
0 50 100-5
0
5amp=3.1623, ph=108.4349
0 50 100-5
0
5amp=3.1623, ph=-71.5651
0 50 100-5
0
5amp=1.4142, ph=-45
0 50 100-5
0
5amp=1.4142, ph=45
0 50 100-5
0
5amp=3.1623, ph=71.5651
0 50 100-5
0
5amp=4.2426, ph=-45
0 50 100-5
0
5amp=3.1623, ph=-18.4349
0 50 100-5
0
5amp=3.1623, ph=18.4349
0 50 100-5
0
5amp=4.2426, ph=45
As in PSK, the i/p signal is multiplicated by both in-phase and quadrature carriers
then integrated over the symbol period to get a multi-level baseband symbol set. The
decision circuit translates those levels to bits which are then combined using the S/P
converter to get the modulated binary data.
Example for 16-Ary QAM symbols
_____________________________________________________________________
Figure (1.68) All possible QAM signals
1.7.5 BW efficiency:
It’s identical to M-Ary PSK where
𝜌 =𝑅𝑏
𝐵𝑊=
𝑙𝑜𝑔2𝑀
2 eqn (1.107)
1.8 SYNCHRONIZATION
The coherent detection of a digitally modulated signal , irrespective of its form,
requires that the receiver be synchronous to the transmitter. We say that two
sequences of events (representing a transmitter and a receiver) are synchronous
relative to each other when the events in one sequence and the corresponding in the
other occur simultaneously. The process of making situation synchronous, and
maintaining in this situation is called synchronization.
From the discussion presented on the operation of digital modulation
techniques, we recognize the need for two basic modes of synchronization:
When coherent detection is used , knowledge of both the frequency and the phase of
the carrier is necessary. The estimation of the carrier phase and frequency is called
carrier recovery or carrier synchronization.

To perform demodulation , the receiver has to know the instants of time at which the
modulation can change its state. That is, it has to know the starting and finishing times
of individual symbols , so that it may determine when to sample and when to quench
the product-integrators. The estimation of these times is called clock recovery or
symbol synchronization.
We have observed that in a digital communication system, the output of the
demodulator must be sampled periodically, once per symbol interval, in order to
recover the transmitted information. Since the propagation delay from the transmitter
to the receiver is generally unknown at the receiver, symbol timing must be derived
from the received signal in order to synchronously sample the output of the
demodulator.
The propagation delay in the transmitted signal also results in a carrier offset, which
must be estimated at the receiver if the detector is phase coherent.
1.8.1 Carrier Recovery and Symbol Synchronization in Signal
Demodulation Symbol synchronization is required in every digital communication system
which transmits information synchronously. Carrier recovery is required if the
signal is detected coherently.
Figure (1.69) illustrates the block diagram of a binary PSK (or binary PAM) signal
demodulator and detector. As shown, the carrier phase estimate ϕ is used in
generating the reference signal g t cos 2πfct + ϕ for the correlator.
The symbol synchronizer controls the sampler and the output of the signal pulse
generator. If the signal pulse is rectangular then the signal generator can
be eliminated.
Figure (1.69) Block digram of binary PSK receiver
The block diagram of an M-ary PSK demodulator is shown in Fig(1.70). In
this case, two correlators (or matched filters) are required to correlate the received
signal with the two quadrature carrier signals g t cos 2πfct + ϕ and
g t sin 2πfct + ϕ . where ϕ is the carrier phase estimate. The detector is now
a phase detector, which compares the received signal phases with the possible
transmitted signal phases.

Figure(1.70) Block diagram of M-ary PSK receiver
Finally, we illustrate the block diagram of a QAM demodulator in Fig( ). An AGC is
required to maintain a constant average power signal at the input to the demodulator.
We observe that the demodulator is similar to a PSK demodulator, in that both
generate in-phase and quadrature signal samples (X, Y) for the detector. In the case of
QAM the detector computes the euclidean distance between the received noise
corrupted signal point and the M possible transmitted points, and selects the
signal closest to the received point.
Figure(1.71) Block diagram of QAM receiver.

1.8.2 Carrier Recovery:
The PSK signals have no spectral line at carrier frequency. Therefore a device
is needed in the carrier recovery circuit to generate such a line spectrum. There are
two main types of carrier synchronizers, the Mth power loop, and the Costas loop.
Figure (1.71 ) is the Mth power loop for carrier recovery for M-ary PSK. For
BPSK (or DBPSK), M = 2, thus it is a squaring loop. For QPSK (or
OQPSK,DQPSK), M = 4, it is a quadrupling loop, and so on. It is the Mth power
device that produces the spectral line at Mfc. The phase lock loop consisting of the
phase detector, the LPF, and the VCO, tracks and locks onto the frequency and phase
of the M fc component. The divide-by-M device divides the frequency of this
component to produce the desired carrier at frequency fc and with almost the same
phase of the received signal. Before locking, there is a phase difference in the
received signal relative to the VCO output signal. We denote the phase of the received
signal as θ and the phase of the VCO output as Mθ .
Figure(1.71) Mth power synchronizer for carrier recovery.
A difficulty in circuit implementation of the Mth power loop is the Mth power
device, especially at high frequencies. Costas loop design avoids this device.
Figure (1.72) is the Costas loop for carrier recovery for BPSK. Initially the VCO
generates a sinusoid with a frequency close to the carrier frequency fc and some initial
phase. The frequency difference and the initial phase are accounted for by the phase
θ . The multipliers in the I and Q-channels produce 2 fc terms and zero frequency
terms. The LPFs attenuate the 2fc terms and their outputs are proportional to
a t cos θ − θ or a t sin θ − θ . Then these two terms multiply again to give the
term 1
2a2 t sin 2 θ − θ which is low-pass filtered one more time to get rid of any
amplitude fluctuation in a2 t , thus the control signal to the VCO is proportional to

sin 2 θ − θ which drives the VCO such that the difference θ − θ becomes smaller
and smaller. For sufficiently small θ − θ, the I-channel output is the demodulated
signal.
Figure(1.72) Costas loop for carrier recovery for BPSK.
The Costas loop for QPSK is shown in Figure (1.73). The figure is self-
explanatory and its working principle is similar to that of BPSK. The limiters are
bipolar, which are used to control the amplitude of the two channels' signal to
maintain balance.
When the phase difference ϕ = θ − θ is sufficiently small, the I- and Q-channel
outputs are the demodulated signals.
A difficulty in Costas loop implementation is to maintain the balance between
the I- and Q-channel. The two multipliers and low-pass filters in these two channels
must be perfectly matched in order to achieve the theoretical performance.
Although the appearance of the Mth power loop and the Costas loop are quite
different, their performance can be shown to be the same.
Figure(1.73) Costas loop for carrier recovery for QPSK.

1.8.3 Clock Recovery
The clock or symbol timing recovery can be classified into two basic groups.
One group is the open loop synchronizer which uses nonlinear devices. These circuits
recover the clock signal directly from the data stream by nonlinear operations on the
received data stream. Another group is the closed-loop synchronizers which attempt
to lock a local clock signal onto the received data stream by use of comparative
measurements on the local and received signals.
Two examples of the open-loop synchronizer are shown in Figure (1.74). The data
stream that we use in the phase shift keying modulation is NRZ waveform.
We know that this waveform has no spectral energy at the clock Frequency. Thus in
the open-loop synchronizers in Figure (1.74), the first thing that one needs to do is to
create spectral energy at the clock frequency. In the first example, a Fourier
component at the data clock frequency is generated by the delay-and-multiply
operation on the demodulated signal m(t).
This frequency component is then extracted by the BPF that follows and shaped
into square wave by the final stage. The second example generates the clock
frequency component by using the differentiator-rectifier combination. The
differentiator is very sensitive to wideband noise, therefore a low-pass filter is placed
in the front end of the synchronizer.
Figure(1.74 ) Two types of open-loop symbol synchronizers.
An early/late-gate circuit shown in Figure (1.75) is an example of the class of
closed-loop synchronizers. The working principle is easily understood by referencing
Figure (1.75). The time zero point is set by the square wave clock locally generated
by the VCO. If the VCO square wave clock is in perfect synchronism with the
demodulated signal m(t), the early-gate integrator and the late-gate integrator will
accumulate the same amount of signal energy so that the error signal e = 0. If the
VCO frequency is higher than that of m(t),then m(t) is late by Δ < d, relative to the
VCO clock. Thus the integration time in the early-gate integrator will be T - d - Δ,
while the integration time in the late-gate integrator is still the entire T - d. The error

signal will be proportional to - Δ. This error signal will reduce the VCO frequency
and retard the VCO timing to bring it back toward the timing of m(t). If the VCO
frequency had been lower and the timing had been late, the error signal would be
proportional to +Δ, and the reverse process would happen, that is, the VCO
frequency would be increased and its timing would be advanced toward that of the
incoming signal.
Figure(1.75) Early/late-gate clock synchronizer.
Figure(1.76) Early-late-gate timing illustration.

1.8 COMPARISON BETWEEN DIGITAL MODULATION
SCHEMES
As we introduce the main digital modulation schemes in the previous section we here
introduce a comparison between them as a conclusion
Table (1.8) presents a comparison between the previously introduced modulation
schemes from the probability of error point of view
Modulation
scheme
Probability of error
ASK
𝑃𝑒 = 𝑄 𝐸𝑏
2𝑁0
M ary ASK
𝑃𝑠 =2(𝑀 − 1)
𝑀𝑄
6(𝑙𝑜𝑔2𝑀)𝐸𝑏 𝑎𝑣𝑔
𝑀2 − 1 𝑁𝑜
BFSK
𝑃𝑒 =1
2𝑒𝑟𝑓𝑐
𝐸𝑏
2 𝑁0
M-ary FSK
BPSK
𝑃𝑒 = 𝑄 2𝐸𝑏
𝑁𝑜
DPSK 𝑃𝑒 =
1
2𝑒−𝐸𝑏 /𝑁𝑜
M-ary PSK
𝑃𝑒 ≤ 2𝑄 2𝐸𝑏 𝑙𝑜𝑔2𝑀
𝑁𝑜 𝑠𝑖𝑛
𝜋
𝑀
QPSK
𝑃𝑒 = 𝑄 2𝐸𝑏
𝑁𝑜
MSK
𝑃𝑒 = 𝑒𝑟𝑓𝑐( 𝐸𝑏
𝑁0)
GMSK
𝑃𝑒 = 𝑒𝑟𝑓𝑐( 2𝛾𝐸𝑏
𝑁0)
QAM
𝑃𝑒 = 2 1 −1
𝑀 𝑒𝑟𝑓𝑐
3𝐸𝑎𝑣
2(𝑀 − 1)𝑁0
Table (1.8) Error probabilities for various modulation schemes

Table (1.8) introduces a comparison between relevant modulation schemes from the
Bandwidth efficiency and power efficiency and the error free Eb/No.
Table(1.8) Error free Eb/No for relevant modulation schemes
1.9 DISCUSSION OF THE ABOVE MODULATION SCHEMES:
Coherent reception provides better performance than differential, but requires
a more complex receiver.
The above table shows that bandwidth efficiency is traded off against power
efficiency.
MFSK is power efficient, but not bandwidth efficient (because the
probability of error decreases by increasing M; however that would
increase the transmission bandwidth).
MPSK and QAM are bandwidth efficient but not power efficient.
Mobile radio systems are bandwidth limited, therefore PSK is more
suited.
Phase Shift Keying is often used, as it provides a highly bandwidth
efficient modulation scheme.
The constant envelope class is generally suitable for communication systems
whose power amplifiers must operate in the nonlinear region of the input-
output characteristic in order to achieve maximum amplifier efficiency. An
example is the TWTA (traveling wave tube amplifier) in satellite
communications.
QPSK, modulation is very robust, but requires some form of linear
amplification. OQPSK and π/4-QPSK can be implemented, and reduce
the envelope variations of the signal.
The π/4-QPSK is worth special attention due to its ability to avoid 180o
abrupt phase shift and to enable differential demodulation. It has been

used in digital mobile cellular systems, such as the United States
digital cellular (USDC) system.
The PSK schemes have constant envelope but discontinuous phase
transitions from symbol to symbol. The CPM schemes have not only
constant envelope, but also continuous phase transitions. Thus they
have less side lobe energy in their spectra in comparison with the PSK
schemes. The CPM class includes, GMSK, and MSK.
MSK is a special case of CPFSK, but it also can be derived from
OQPSK with extra sinusoidal pulse-shaping. MSK has excellent power
and bandwidth efficiency. Its modulator and demodulator are also not
too complex. MSK has been used in NASA's Advanced
Communication Technology Satellite (ACTS).
GMSK has a Gaussian frequency pulse. Thus it can achieve even better
bandwidth efficiency than MSK. GMSK is used in the US cellular
digital packet data (CDPD) system and European GSM (global system
for mobile communication) system.
Constant envelope schemes (such as GMSK) can be employed since
an efficient, non-linear amplifier can be used.
The generic nonconstant envelope schemes, such as ASK and QAM, are
generally not suitable for systems with nonlinear power amplifiers. However
QAM, with a large signal constellation, can achieve extremely high bandwidth
efficiency. QAM has been widely used in modems used in telephone
networks, such as computer modems. QAM can even be considered for
satellite systems. In this case, however, back-off in TWWs input and output
power must be provided to ensure the linearity of the power amplifier.
High level M-ary schemes (such as 64-QAM) are very bandwidth efficient,
but more susceptible to noise and require linear amplification.
1.10 SIMULATION RESULTS USING MATLAB:
We now proceed to simulate and assess the above introduced modulation schemes we
used in simulation four methods which are:
BER tool of communication blockset.
SIMULINK models.
M-file commands.
And GUI(graphical user interface) of our own.
1.10.1 BER tool of communication blockset:
Using the Bit error rate tool located in the communication toolbox .
The tool gives the capability of:
Managing a series of simulations with different values of Eb/N0.
Collecting the results of bit error rate & importing to workspace.

Creating a plot & Produce a comparison curves between different
types of modulation.
The simulation can be theoretical, semi-analytic or Monte carlo
analysis.
The simulation can be achieved in AWGN & Rayleigh fading channel.
The tool supports:
Channel coded sequence(convolution & block)
Coherent and noncoherent detection
Differential encoded sequence.
Synchronization errors addition.
Figure (1.77) BER tool

By using the above tool in the theoretical mode we obtain the next results:
1.10.1.1 Phase shift keying (PSK) modulation scheme simulation
Figure (1.78) Simulation of PSK modulation schemes
By simulating PSK modulation schemes from BPSK to 64 PSK in the signal to noise
ratio range of 0-20 dB(for 32PSK and 64PSK we extend the range to 30 dB) we will
find that:
BPSK and QPSK have the same probability of error but QPSK has higher
spectral efficiency.
As M increases the probability of error increases which represents a power
/bandwidth efficiency trade off.
From the figure we deduct that the QPSK is robust modulation scheme that
we can employ in noisy channels in WiMAX
From the figure we conclude the power efficiency and spectral efficiency
BPSK QPSK 8PSK 16PSK 64PSK
Spectral efficiency (log2 M/2) 0.5 1 1.5 2 3
Power efficiency (for BER=10-6
) 10.5dB 10.5dB 18.5dB 23.2dB 28.5dB
Table (1.9) PSK power and spectral efficiencies simulation results

Figure (1.79) QPSK, OQPSK, DQPSK simulation
Figure (1.79) shows a simulation for QPSK,OQPSK and DQPSK simulation from
0:20 dB
We found that
OQPSK and QPSK has the same BER but with less phase abrupt changes
DQPSK is inferior to both by 3dB.
Figure (1.80) shows a simulation for BPSK versus DPSK simulation in the range of 0-
15 dB
We found that DPSK is slightly inferior to BPSK but in the expense on increasing the
complexity of the coherent demodulator employed to demodulate PSK signal

Figure (1.80) BPSK and DPSK simulation
1.10.1.2 Frequency shift keying simulation (FSK) simulation
Figure (1.81) shows the effect of increasing the order of FSK modulation from the
BFSK into 32FSK.
Figure (1.81) M-ary FSK simulation

From the figure we conclude that:
As the order of modulation increases (M increases) the BER decreases.
That increase in power efficiency is traded off by the required transmission
bandwidth Table (1.10) shows the power efficiencies of M-ary FSK
BFSK 4FSK 8FSK 16FSK 32PSK
Power efficiency (for BER=10-6
) 13.5 dB 10.7dB 9.2 dB 8.2 dB 7.5 dB
Table(1.10) M-ary FSK power efficiency
Figure (1.82) BFSK, MSK simulation
Figure (1.82) shows a simulation of BFSK and MSK and we can here assess that the
MSK has a better BER performance than BFSK and hence better more power
efficient.

Figure (1.83) coherent and noncoherent FSK
Figure (1.83) shows that noncoherent FSK is inferior to coherent FSK
1.10.1.3 QAM simulation
Figure (1.84) QAM simulation

Figure (1.84) shows QAM simulation for various modulation order (16,32,
64,128,256,512,1024) in the signal to noise ratio of 0-30 dB and we found that:
As M increases the BER increases.
2QAM and 4QAM are BPSK and QPSK which are previously simulated
As M increases the spectral efficiency increases.
16QAM and 64QAM are suitable modulation scheme to be employed in good
channel conditions in WiMAX
Table (1.11) shows the power efficiencies /bandwidth efficiency of QAM
modulation
QAM order 8 16 32 64 128 256 512 1024
Spectral efficiency (log2
M/2)
1.5 2 2.5 3 3.5 4 4.5 5
Power efficiency (for
BER=10-6
) in dB
13.5 14.5 17.5 18.7 22 23.5 27 28.5
Table (1.9) QAM power and spectral efficiencies simulation results
1.10.1.4 Comparative simulation of various modulation schemes
Figure (1.85) modulation schemes used in WiMAX simulation

Figure (1.85) shows the three modulation schemes used in WiMAX system, the
results instruct an adaptive modulation to be employed in WiMAX system according
to channel conditions (signal to noise ratio)
Figure (1.86) comparative simulation for 16FSK, 16PSK, 16QAM
Figure (1.86) shows a comparative simulation between different modulation schemes
each having same modulation order 16 so we found that:
16 FSK is the best modulation scheme which is pointed out before (since it
trades the better performance by the excessive transmission bandwidth).
16 QAM is better than 16PSK (since the symbols in 16QAM cover all the
spaces in the constellation diagram and not confined to a densely packed
circle).
Hence when it is required to achieve same spectral efficiency square QAM is
used instead PSK. However PSK is used when the linear amplification is
considered.
Figure (1.87) shows a comparative simulation between all introduced modulation schemes

Figure (1.87) Comparative simulation between all modulation schemes
As we found from figure we can arrange the modulation schemes descendingly from
the most power efficient scheme to the least as following:
32FSK16FSK8FSKBPSK/QPSK4FSKBFSK8PSK16QAM
32 QAM16PSK64QAM256QAM.

1.10.2 SIMULINK simulation & constellation diagram
The simulink library has several of uesful blocks that can be in the
performance analysis of modulation schemes such that:
Binary generators for creating a random sequence of bits.
Channels (AWGN-Rayleigh fading).
Scatter plot scope and eye diagram scope.
Dynamic error rate calculation.
Various modulation schemes.
1.10.2.1 The SIMULINK model used in evaluating BER
Figure (1.88) shows the SIMULINK model used for simulation and evaluating BER
The model includes:
Bernoulli generator for generating bits.
Block of desired modulation & demodulation technique.
Channel (ex:AWGN).
Scatter plot for plotting the constellation diagram.
Error rate calculator to calculate BER.
NOTE: by changing the blocks of modulation and demodulation we can study
different schemes.
Figure (1.89) BER calculation using SIMULINK

1.10.3.2 Sample runs with different Signal to noise ratios
(a) With SNR=5dB.
_____________________________________________________________________
Figure (1.90) Simulation results with SNR=5dB.
Figure (1.90) shows a simulation results when the signal to noise ratio is very low (5
dB) we can see that:
The constellation points moves away from its designated points due to large
noise power.
The receiver cannot differentiate between symbols correctly and hence that
will lead to 0.004 bit error rate.
(b) with SNR=10dB
Figure(1.91) Simulation results with 10 dB

As shown in figure (1.91) that although the constellation points moves away around
its transmitted places but the movement is confined to the decision region and hence
no error occurs
(c) With SNR=100dB(no noise approximately)
_____________________________________________________________________
Figure (1.92) Simulation results when SNR=100dB
In figure (1.92) we can see that when no noise is added (approximately) the
constellation points will lay in its correct places.
1.10.4 M-files commands
The communication toolbox presents a rich library of commands that cover all
modulation schemes and will lead to similar results that we obtained before and here
we present them without displaying the output which was introduced before
• For generating the random bits:
• randint(n,1).
• Converting to symbols:
• xsym = bi2de(reshape(x,k,length(x)/k).','left-msb');
• Channels:
• y = awgn(x,snr)
• Constellation:
• h = scatterplot(yrx(1:nsamp*5e3),nsamp,0,'g.');
• Bit error rate:
• [number_of_errors,bit_error_rate] = biterr(x,z)

And the modulation commands:
Figure (1.93) Modulation commands in MATLAB
And also MODEM objects:
Figure (1.94) MODEM objects in MATLAB

1.10.3 Our GUI for modulation:
Last we introduce a GUI for modulation. The program was designed to illustrate
different modulation schemes in time and frequency domain
The program asks the user for the message bits and the frequency of the carrier and
the user can choose the appropriate modulation scheme from the set
{ASK,BFSK,BPSK,QPSK} and the program will draw tha modulated signal in time
and frequency domain.
Sample Run:
QPSK of {1 0 0 1 1 1 0 1 1 0 1 0 0 0 0 1 1 0 1 1 1 0 1 0 1 0}

And in the frequency domain: